
Morphological Reconstruction for Variable Wing Leading Edge Based on the Node Curvature Vectors


Abstract
:1. Introduction
2. NCV-CPM Methodology
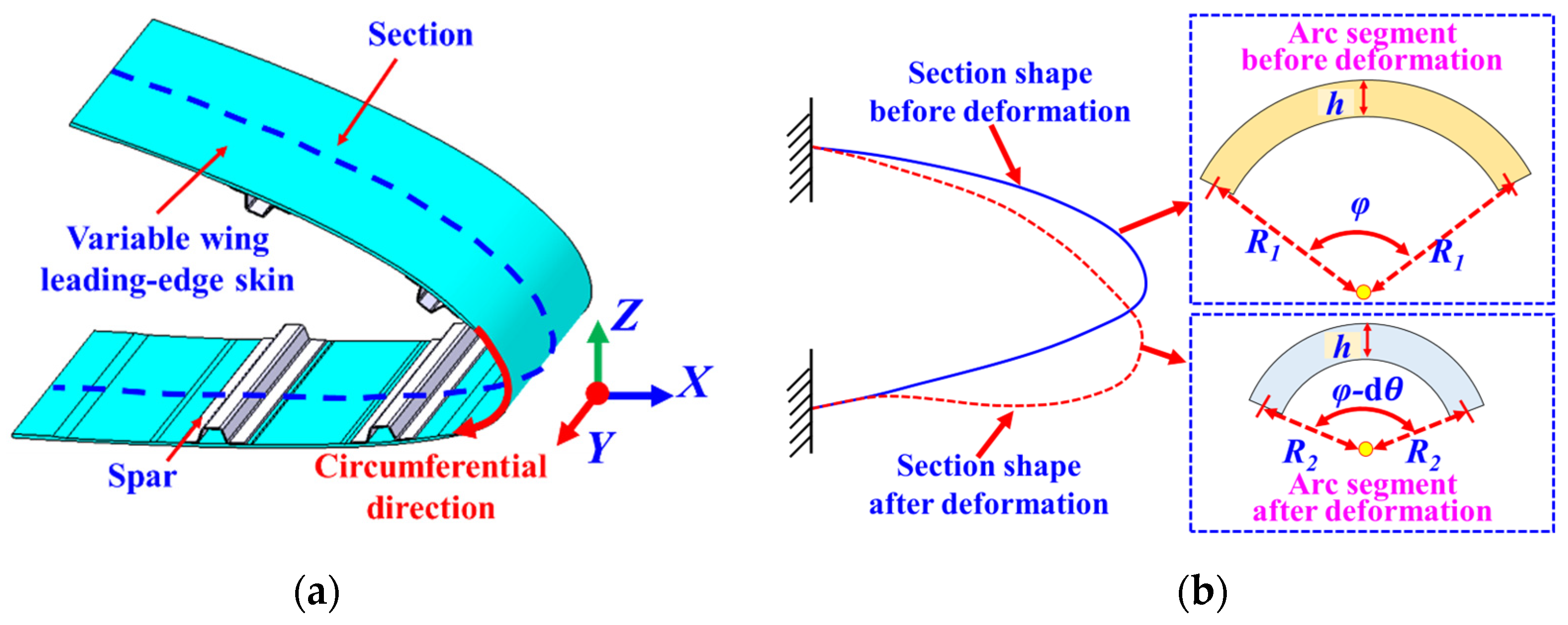
2.1. Construction of Strain–Arc Curvature Function for Sensing Points
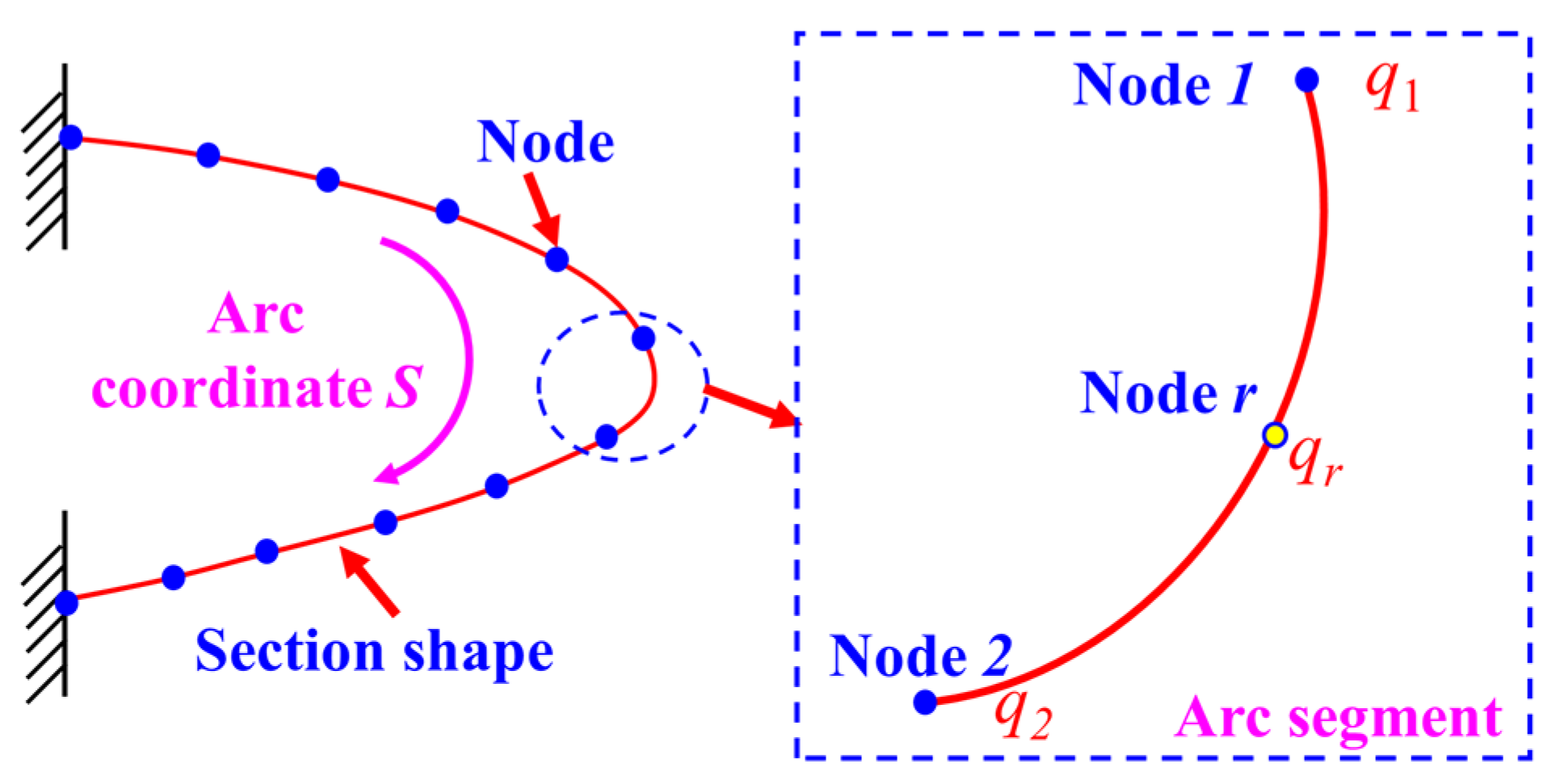
2.2. Reconstruction of Wing Leading-Edge Curvature and Strain Field Based on Node Curvature Vectors
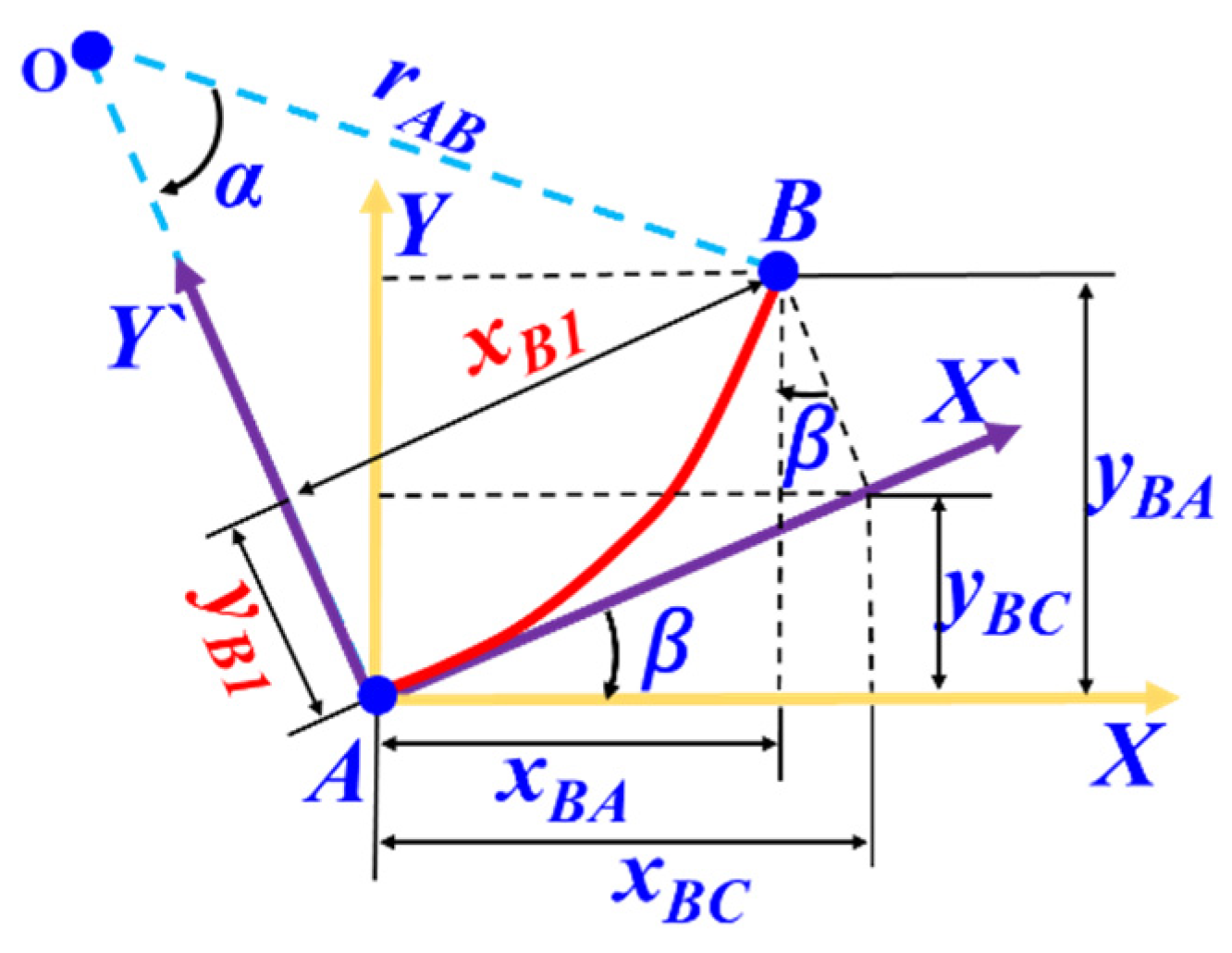
2.3. Morphological Reconstruction Based on Curvature Propagation Method
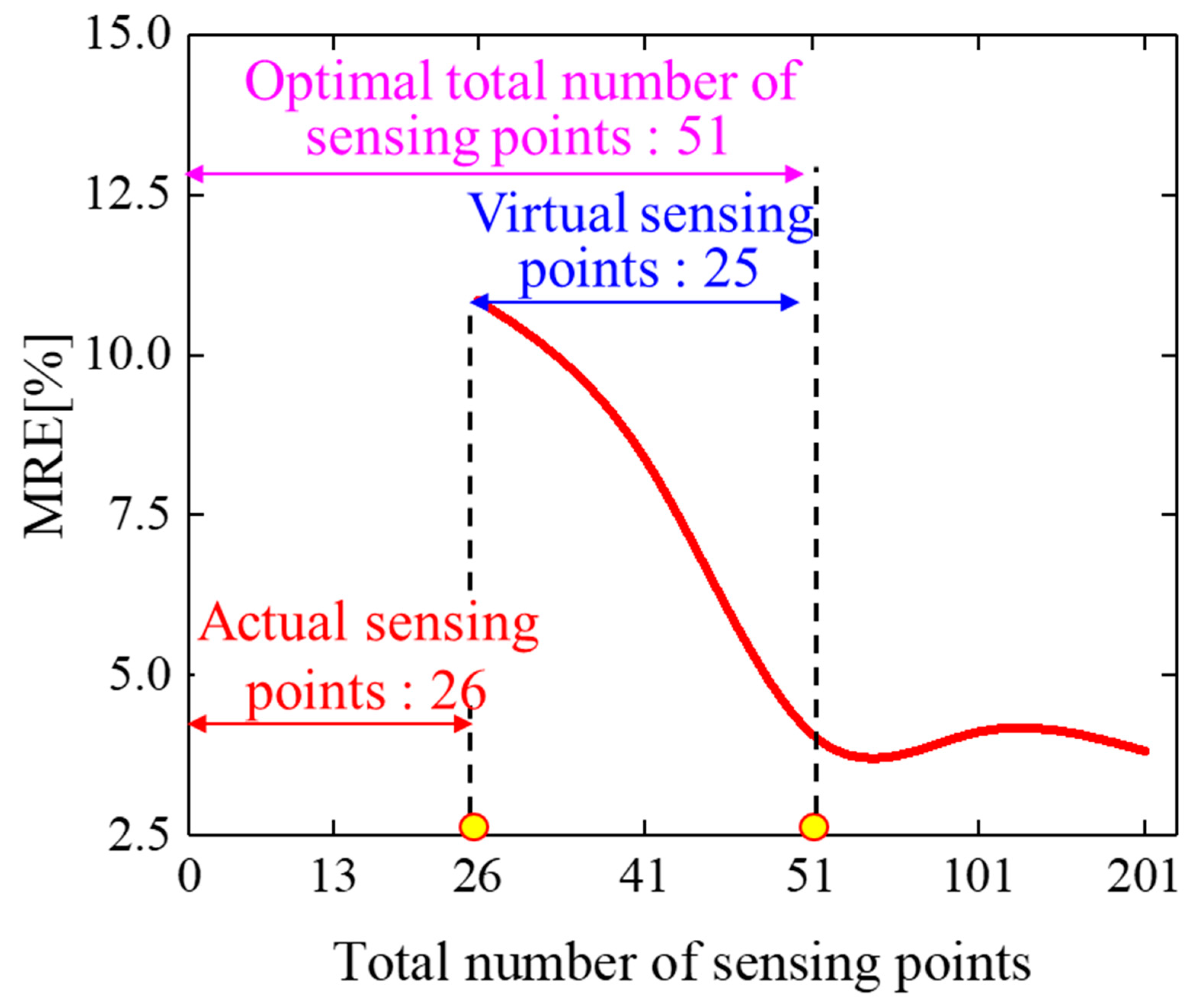
2.4. Optimization of Virtual Sensing Point Quantity Based on Particle Swarm Algorithm
3. Simulation Verifications
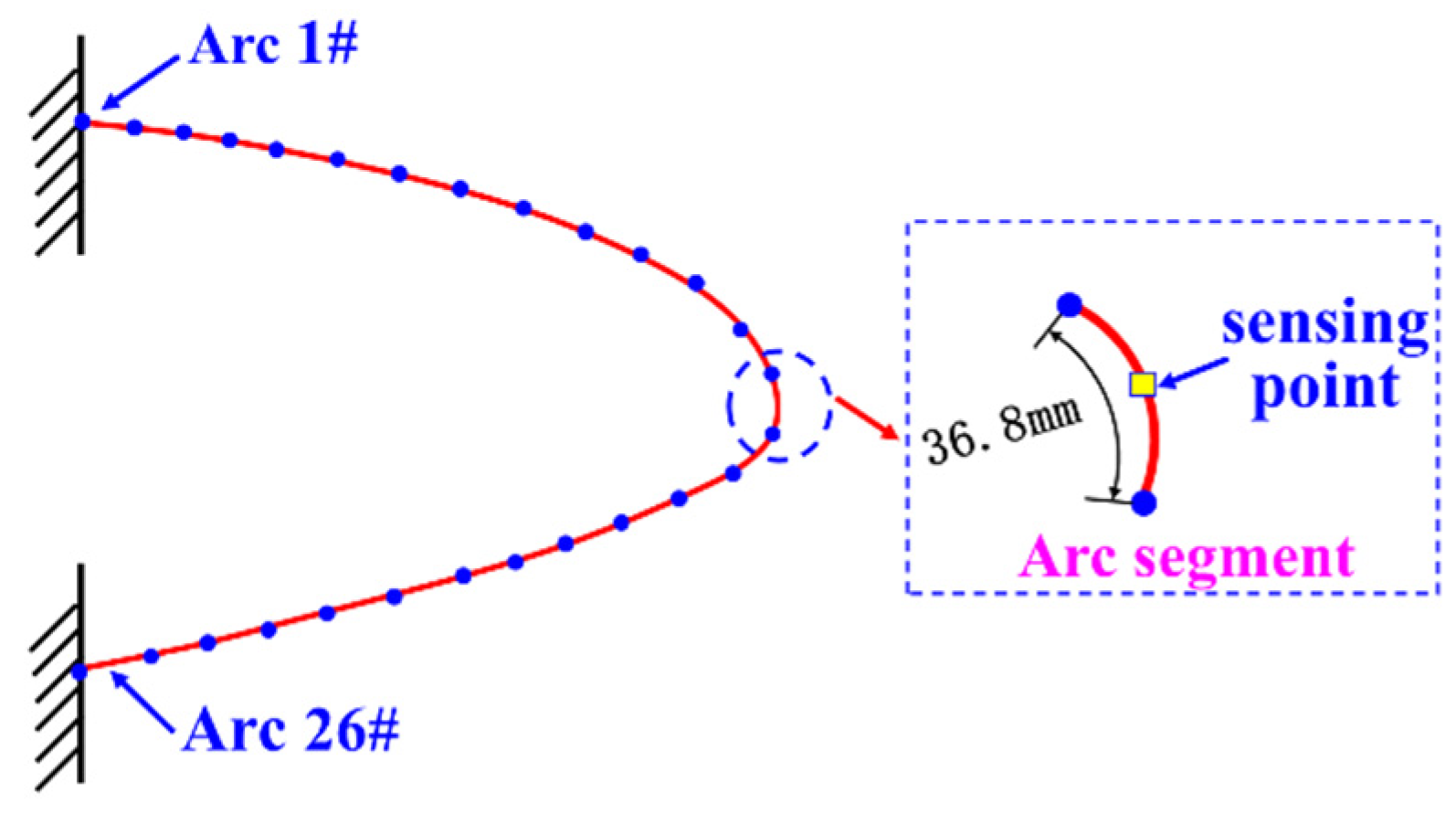
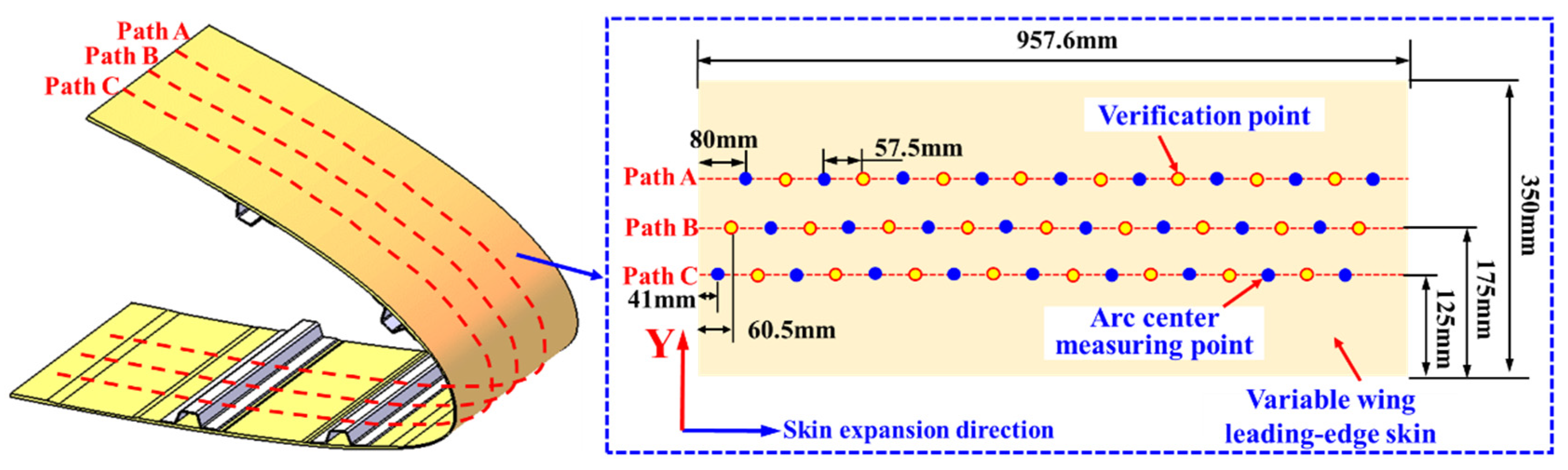
3.1. Construction of Variable Wing Leading-Edge Model
3.2. Results and Discussion
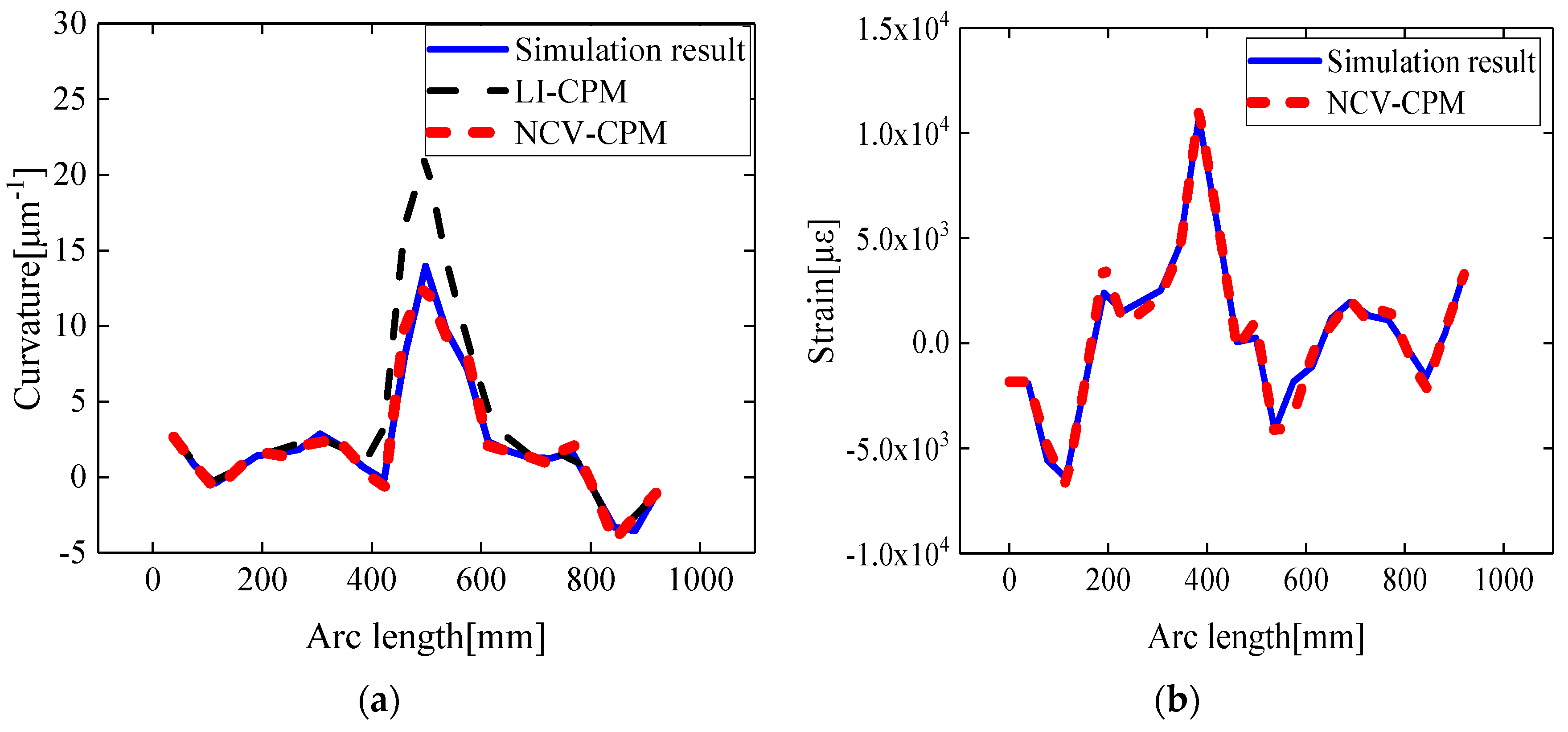
3.2.1. Comparison of Curvature and Strain Reconstruction Errors between LI-CPM and NCV-CPM
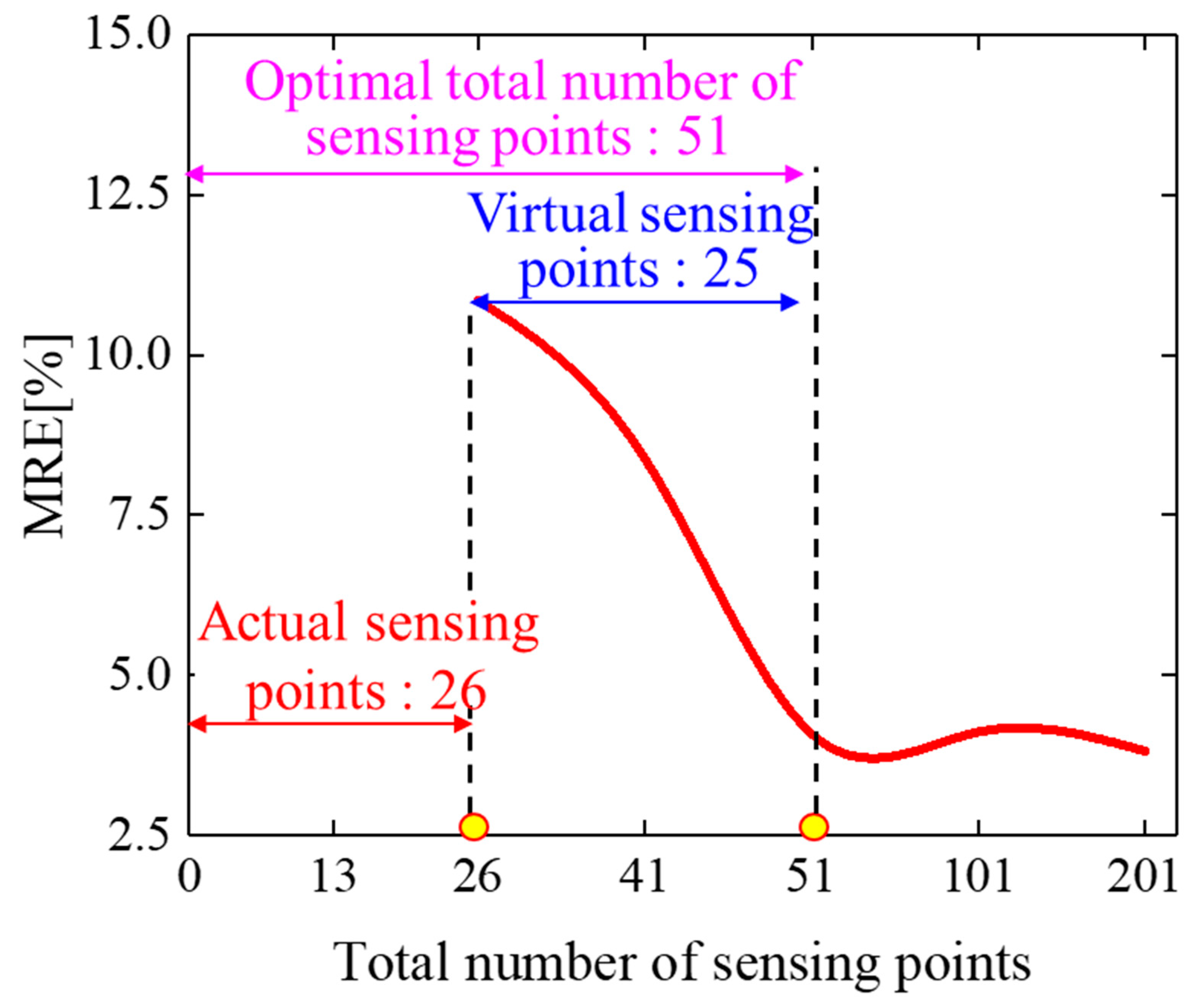
3.2.2. Optimization of Virtual Sensing Node Quantities Based on Particle Swarm Algorithms
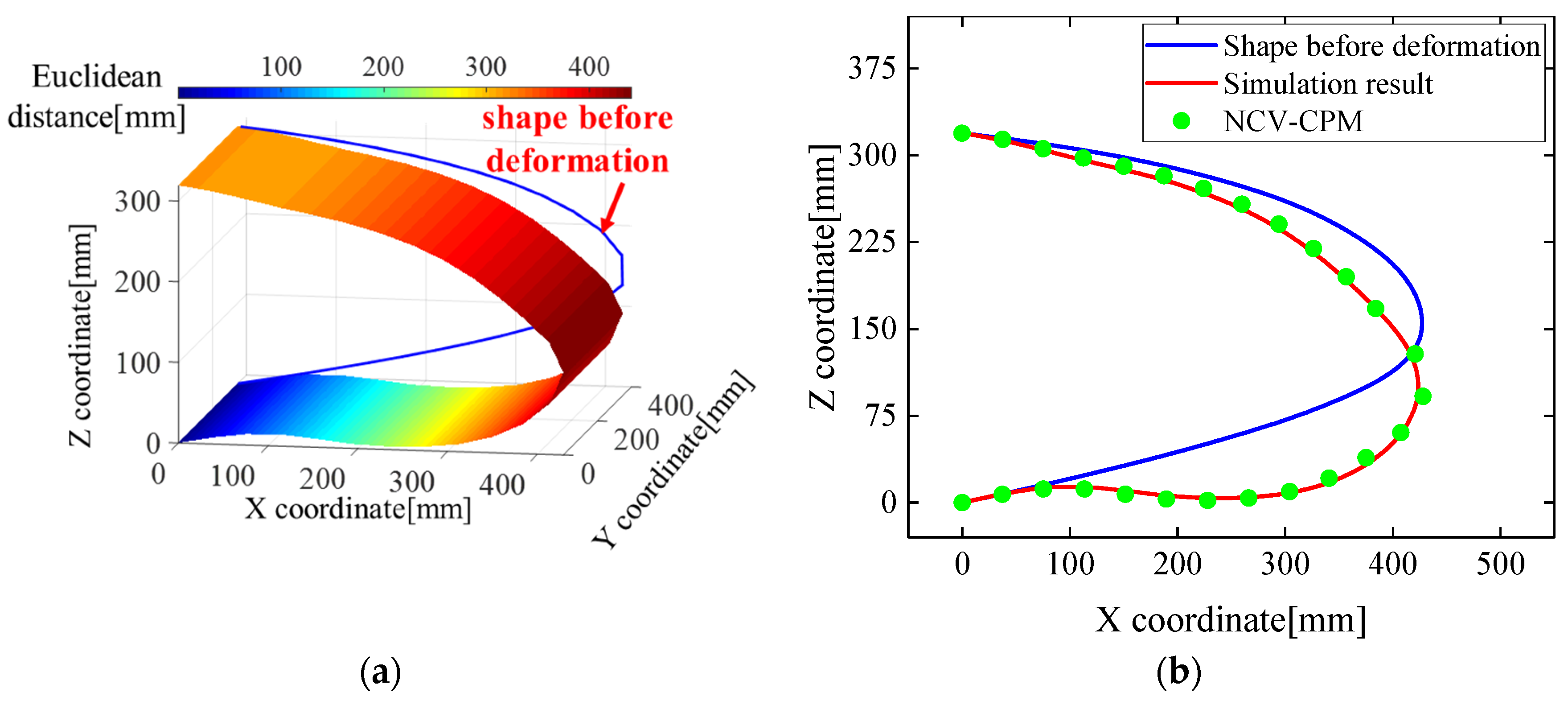
3.2.3. Comparison of Morphology Reconstruction Errors between LI-CPM and NCV-CPM
4. Experimental Validations
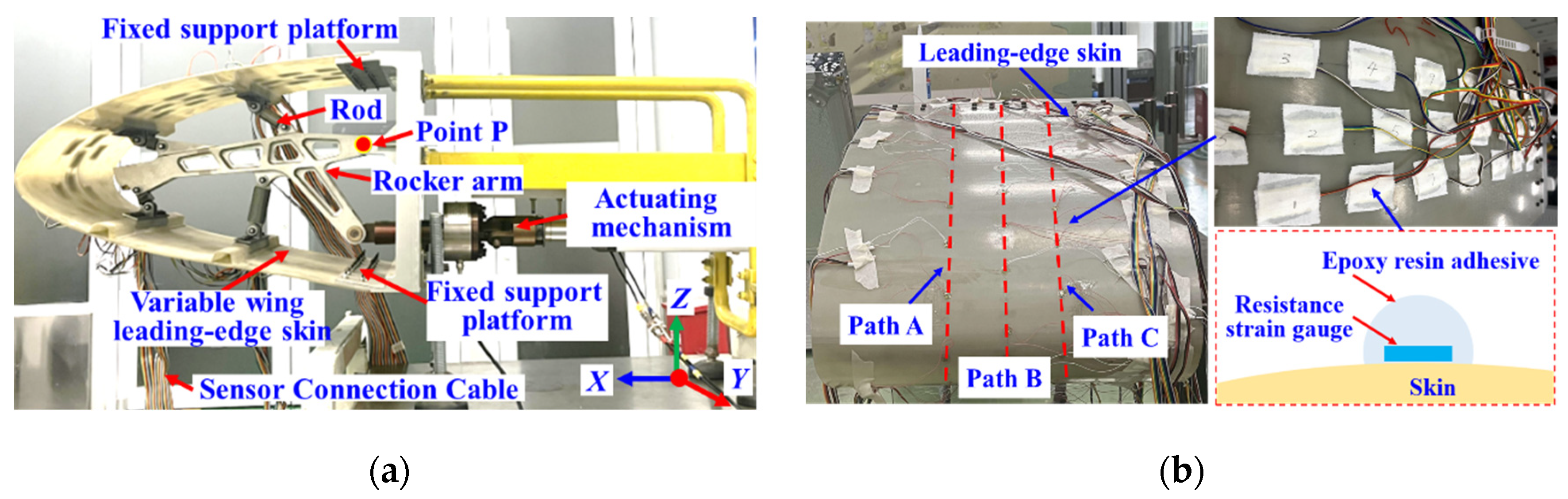
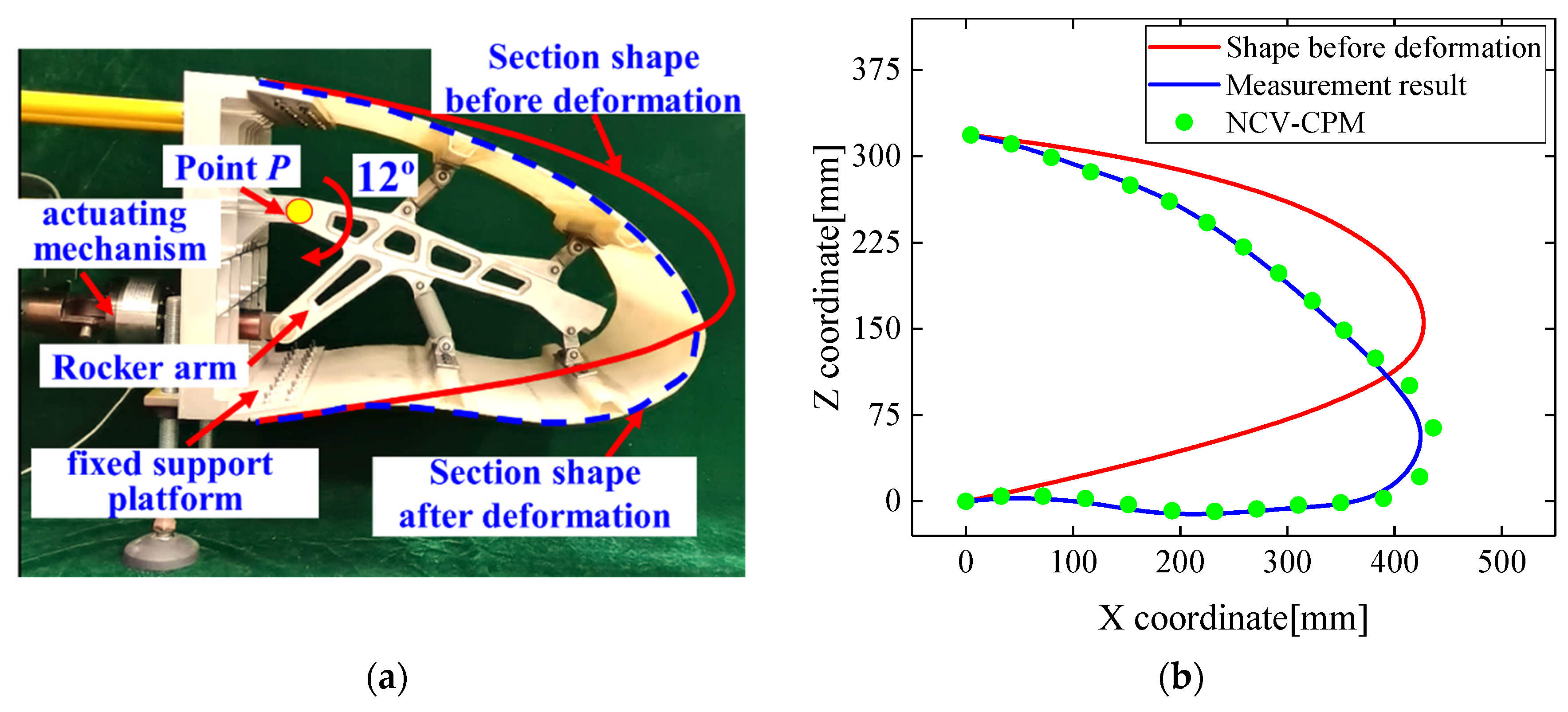
4.1. Construction of Monitoring System for Variable Wing Leading-Edge Morphology
4.2. Results and Discussion
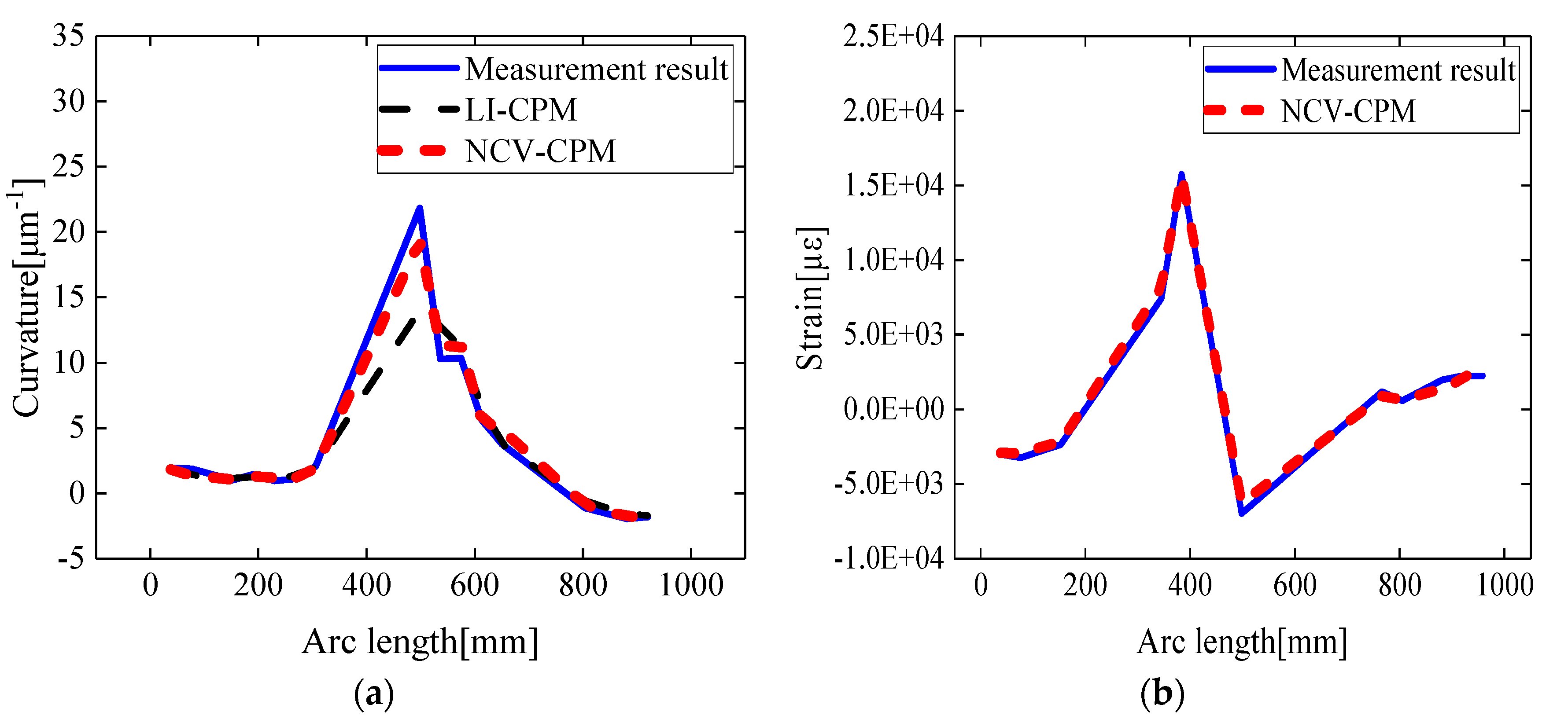
4.2.1. Comparison of Curvature and Strain Reconstruction Errors between LI-CPM and NCV-CPM
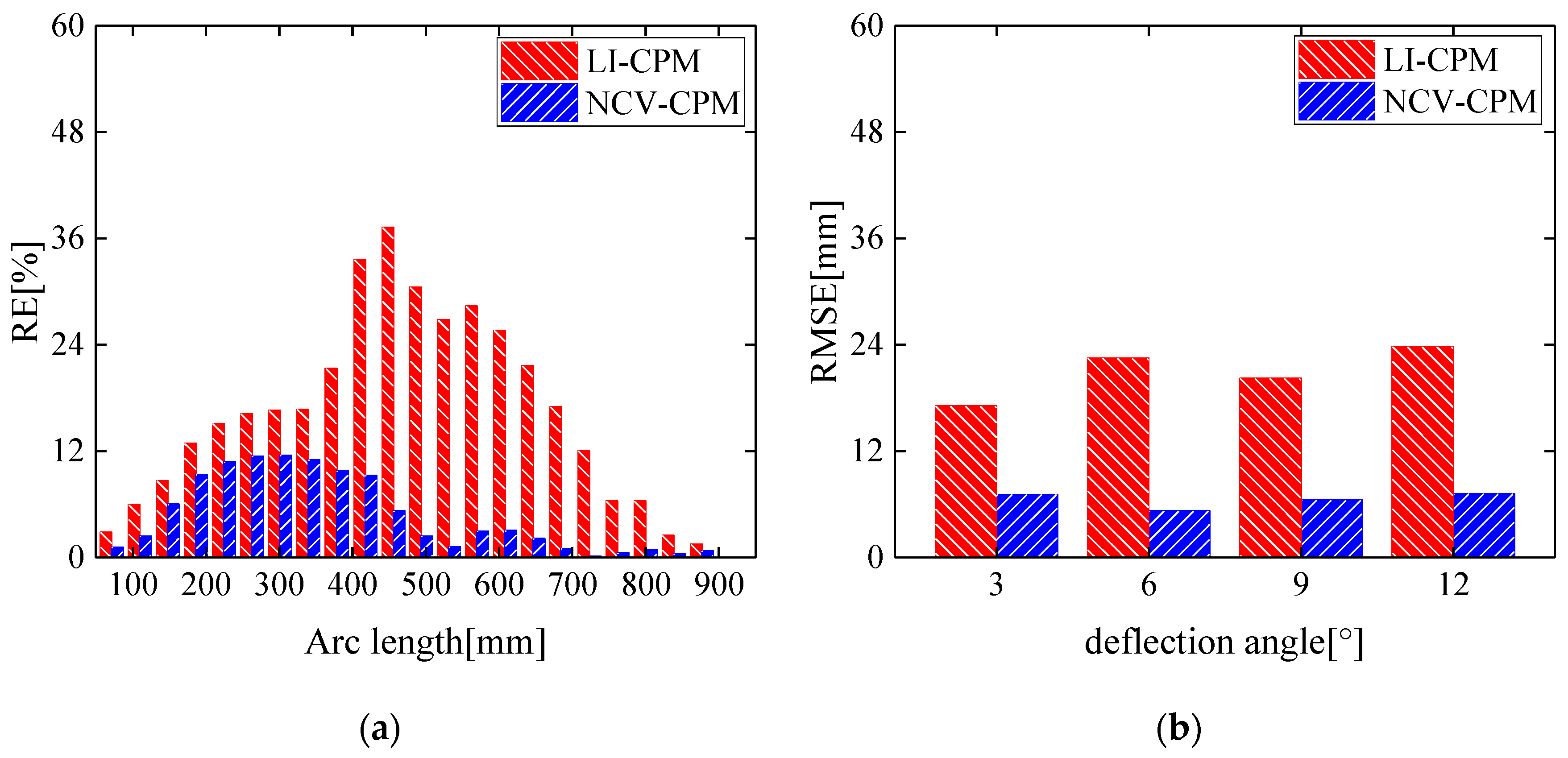
4.2.2. Comparison of Morphology Reconstruction Errors between LI-CPM and NCV-CPM
5. Conclusions
- (1)
- The surface angle was introduced into the relationship model between strain and surface curvature to improve the accuracy of the curvature calculation for sensing points on the wing leading edge.
- (2)
- A method for solving node curvature vectors based on high-order curvature fitting functions was proposed. Compared with the conventional curvature recursion method based on first-order interpolation functions, the error in curvature field reconstruction could be reduced from 25.09% to 6.32%. Furthermore, after obtaining the curvature field of the wing leading edge, its application in the strain–surface curvature function enabled the inverse reconstruction of the strain field of the wing leading edge.
- (3)
- An optimization method for the number of sensing points based on the particle swarm algorithm was proposed, determining the optimal number of virtual sensing points. This not only simplified the complexity of the wing leading-edge sensing network but also improved the accuracy of morphological reconstruction. The results showed that, compared with the conventional curvature recursion method, the morphological reconstruction error of the wing leading edge decreased from 17.05% to 4.92%.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Bashir, M.; Negahban, M.H.; Botez, R.M.; Wong, T. Numerical Simulation of the Transient Flow around the Combined Morphing Leading-Edge and Trailing-Edge Airfoil. Biomimetics 2024, 9, 109. [Google Scholar] [CrossRef]
- Arachchige, B.; Ghasemnejad, H.; Yasaee, M. Effect of bird-strike on sandwich composite aircraft wing leading edge. Adv. Eng. Softw. 2020, 148, 102839. [Google Scholar] [CrossRef]
- Chen, M.; Liu, J.; Skelton, R.E. Design and Control of Tensegrity Morphing Airfoils. Mech. Res. Commun. 2020, 103, 103480. [Google Scholar] [CrossRef]
- Shen, Y.; Chen, M.; Skelton, R. Markov data-based reference tracking control to tensegrity morphing airfoils. Eng. Struct. 2023, 291, 116430. [Google Scholar] [CrossRef]
- Asins, C.C.; Landersheim, V.; Laveuve, D.; Adachi, S.; May, M.; Wacker, J.D.; Decker, J. Analysis and Design of a Leading Edge with Morphing Capabilities for the Wing of a Regional Aircraft—Gapless Chord-and Camber-Increase for High-Lift Performance. Appl. Sci. 2021, 11, 2752. [Google Scholar] [CrossRef]
- Arra, A.; Anekar, N.; Nimbalkar, S. Aerodynamic effects of leading edge (LE) slats and slotted trailing edge (TE) flaps on NACA-2412 airfoil in prospect of optimization. Mater. Today Proc. 2021, 44, 587–595. [Google Scholar] [CrossRef]
- Corigliano, P.; Crupi, V.; Pei, X.; Dong, P. DIC-Based Structural Strain Approach for Low-Cycle Fatigue Assessment of AA 5083 Welded Joints. Theor. Appl. Fract. Mech. 2021, 116, 103090. [Google Scholar] [CrossRef]
- Rashidi, M.; Mohammadi, M.; Kivi, S.S.; Abdolvand, M.; Truong-Hong, L.; Samali, B. A Decade of Modern Bridge Monitoring Using Terrestrial Laser Scanning: Review and Future Directions. Remote Sens. 2020, 12, 3796. [Google Scholar] [CrossRef]
- Li, Z.; Cheng, Y.; Zhang, L.; Wang, G.; Ju, Z.; Geng, X.; Jiang, M. Strain Field Reconstruction of High-Speed Train Crossbeam Based on FBG Sensing Network and Load-Strain Linear Superposition Algorithm. IEEE Sens. J. 2021, 22, 3228–3235. [Google Scholar] [CrossRef]
- Li, J.; Yan, J.; Zhu, J.; Qing, X. K-BP neural network-based strain field inversion and load identification for CFRP. Measurement 2022, 187, 110227. [Google Scholar] [CrossRef]
- Wang, J.; Li, J.; Wang, Z. A Novel Shape Restoration Algorithm for Ultra-fast Morphology Perception System based on Multiplexing FBG Array. Measurement 2023, 218, 113130. [Google Scholar] [CrossRef]
- Wu, H.F.; Liang, L.; Wang, H.; Dai, S.; Xu, Q.; Dong, R. Design and Measurement of a Dual FBG High-Precision Shape Sensor for Wing Shape Reconstruction. Sensors 2022, 22, 168. [Google Scholar] [CrossRef]
- Palma, P.D.; Iadicicco, A.; Campopiano, S. Curvature Sensor Based on FBGs Embedded in 3D Printed Patches. IEEE Sens. J. 2021, 21, 17868–17874. [Google Scholar] [CrossRef]
- Li, T.; Qiu, L.; Ren, H. Distributed Curvature Sensing and Shape Reconstruction for Soft Manipulators With Irregular Cross Sections Based on Parallel Dual-FBG Arrays. IEEE-ASME Trans. Mechatron 2020, 25, 406–417. [Google Scholar] [CrossRef]
- Cheng, G.; Shi, L.; Pan, X. FBG-Based Deformation Reconstruction Method of Multipoint Elastic Support Thin Plate. IEEE Sens. J. 2023, 23, 6919–6930. [Google Scholar] [CrossRef]
- Li, T.; Liu, M.; Li, R. FBG-based online monitoring for uncertain loading-induced deformation of heavy-duty gantry machine tool base. Mech. Syst. Signal Process. 2020, 144, 106864. [Google Scholar] [CrossRef]
- Roesthuis, R.J.; Janssen, S.; Misra, S. On using an array of fiber Bragg grating sensors for closed-loop control of flexible minimally invasive surgical instruments. In Proceedings of the 2013 IEEE/Rsj International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 2545–2551. [Google Scholar] [CrossRef]
- Dogu, M.; Menkulasi, F. Moment-Curvature-Deformation Response of Post-Tensioned Ultra-High-Performance Concrete Beams. ACI Struct. J. 2022, 119, 301–315. [Google Scholar] [CrossRef]
- Savino, P.; Tondolo, F.; Gherlone, M.; Tessler, A. Application of Inverse Finite Element Method to Shape Sensing of Curved Beams. Sensors 2020, 20, 7012. [Google Scholar] [CrossRef] [PubMed]
- You, R.; Ren, L. An Enhanced Inverse Beam Element for Shape Estimation of Beam-like Structures. Meas. J. Int. Meas. Confed. 2021, 181, 109575. [Google Scholar] [CrossRef]
- Musiałek, F.; Szabra, D.; Wojtas, J. Time-Efficient SNR Optimization of WMS-Based Gas Sensor Using a Genetic Algorithm. Sensors 2024, 24, 1842. [Google Scholar] [CrossRef]
- Kurian, A.M.; Onuorah, M.J.; Ammari, H.M. Optimizing Coverage in Wireless Sensor Networks: A Binary Ant Colony Algorithm with Hill Climbing. Appl. Sci. 2024, 14, 960. [Google Scholar] [CrossRef]
- Ghawy, M.Z.; Amran, G.A.; AlSalman, H.; Ghaleb, E.; Khan, J.; AL-Bakhrani, A.A.; Alziadi, A.M.; Ali, A.; Ullah, S.S. An Effective Wireless Sensor Network Routing Protocol Based on Particle Swarm Optimization Algorithm. Wirel. Commun. Mob. Comput. 2022, 2022, 13. [Google Scholar] [CrossRef]
- Yu, Y.; Zhigang, W.; Shuaishuai, L. Comparative study of two lay-up sequence dispositions for flexible skin design of morphing leading edge. Chin. J. Aeronaut. 2021, 34, 271–278. [Google Scholar] [CrossRef]
- Zhao, Z.; Cheng, T.; Jia, Z. A Method of Structural Vibration Deformation Monitoring Based on FBG Strainmeter and Accelerometer Array. IEEE Access 2023, 11, 140138–140147. [Google Scholar] [CrossRef]
- Zhu, H.; Du, Z.; Tang, Y. Full-field displacement and strain reconstruction for beam structures based on the extended inverse finite element method. Adv. Struct. Eng. 2023, 26, 2429–2446. [Google Scholar] [CrossRef]
- Ganjdoust, F.; Kefal, A.; Tessler, A. A Novel Delamination Damage Detection Strategy Based on Inverse Finite Element Method for Structural Health Monitoring of Composite Structures. Mech. Syst. Signal Process. 2023, 192, 110202. [Google Scholar] [CrossRef]
- Oboe, D.; Colombo, L.; Sbarufatti, C.; Giglio, M. Comparison of strain pre-extrapolation techniques for shape and strain sensing by iFEM of a composite plate subjected to compression buckling. Compos. Struct. 2021, 262, 113587. [Google Scholar] [CrossRef]
- Wu, G.; Qiao, F.; Fang, X.; Liang, M.; Song, Y. Straightness Perception Mechanism of Scraper Conveyor Based on the Three-Dimensional Curvature Sensing of FBG. Appl. Sci. 2023, 13, 3619. [Google Scholar] [CrossRef]
- Yan, R.; Wang, T.; Jiang, X.; Zhong, Q.; Huang, X.; Wang, L.; Yue, X. Design of high-performance plasmonic nanosensors by particle swarm optimization algorithm combined with machine learning. Nanotechnology 2020, 31, 375202. [Google Scholar] [CrossRef]
- Jubair, A.M.; Hassan, R.; Aman, A.H.M.; Sallehudin, H. Social class particle swarm optimization for variable-length Wireless Sensor Network Deployment. Appl. Soft Comput. 2021, 113, 107926. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, Y. Design of a Variable-Stiffness Compliant Skin for a Morphing Leading Edge. Appl. Sci. 2021, 11, 3165. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E1 (GPa) | E1 (GPa) | Nu12 | G12 (GPa) | εt (μ) | εc (μ) |
|---|---|---|---|---|---|
| 47.7 | 13.3 | 0.12 | 47.5 | 33,166 | 13,538 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, J.; Zhu, Q.; Zhao, Y.; Wang, Z.; Yang, Y.; Wu, Q.; Cui, J. Morphological Reconstruction for Variable Wing Leading Edge Based on the Node Curvature Vectors. Biomimetics 2024, 9, 250. https://doi.org/10.3390/biomimetics9040250
Zeng J, Zhu Q, Zhao Y, Wang Z, Yang Y, Wu Q, Cui J. Morphological Reconstruction for Variable Wing Leading Edge Based on the Node Curvature Vectors. Biomimetics. 2024; 9(4):250. https://doi.org/10.3390/biomimetics9040250
Chicago/Turabian StyleZeng, Jie, Qingfeng Zhu, Yueqi Zhao, Zhigang Wang, Yu Yang, Qi Wu, and Jinpeng Cui. 2024. "Morphological Reconstruction for Variable Wing Leading Edge Based on the Node Curvature Vectors" Biomimetics 9, no. 4: 250. https://doi.org/10.3390/biomimetics9040250
APA StyleZeng, J., Zhu, Q., Zhao, Y., Wang, Z., Yang, Y., Wu, Q., & Cui, J. (2024). Morphological Reconstruction for Variable Wing Leading Edge Based on the Node Curvature Vectors. Biomimetics, 9(4), 250. https://doi.org/10.3390/biomimetics9040250