
Octopus-Inspired Soft Robot for Slow Drug Release


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
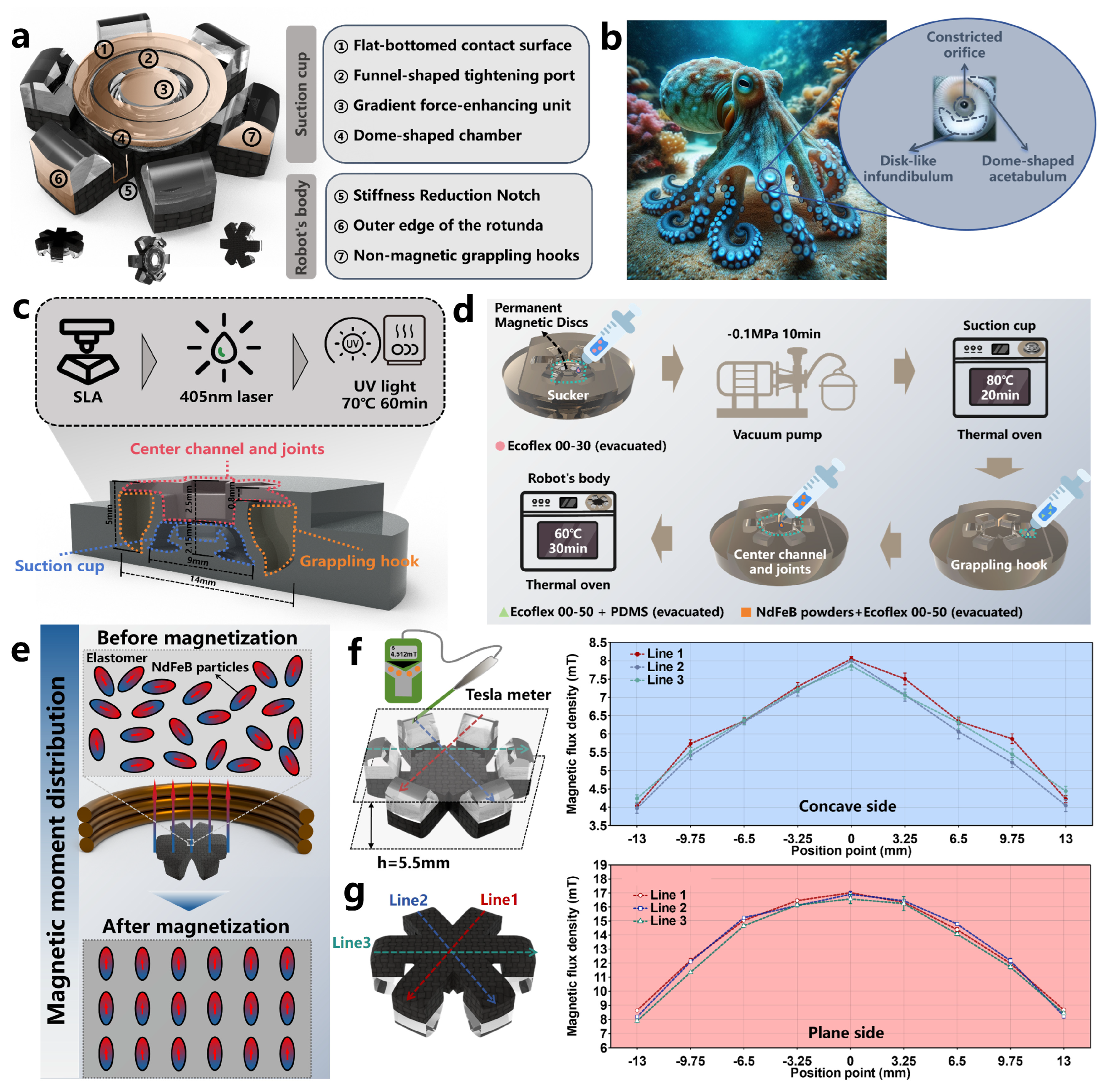
2.1. Design of OISR
2.2. Preparation of OISR
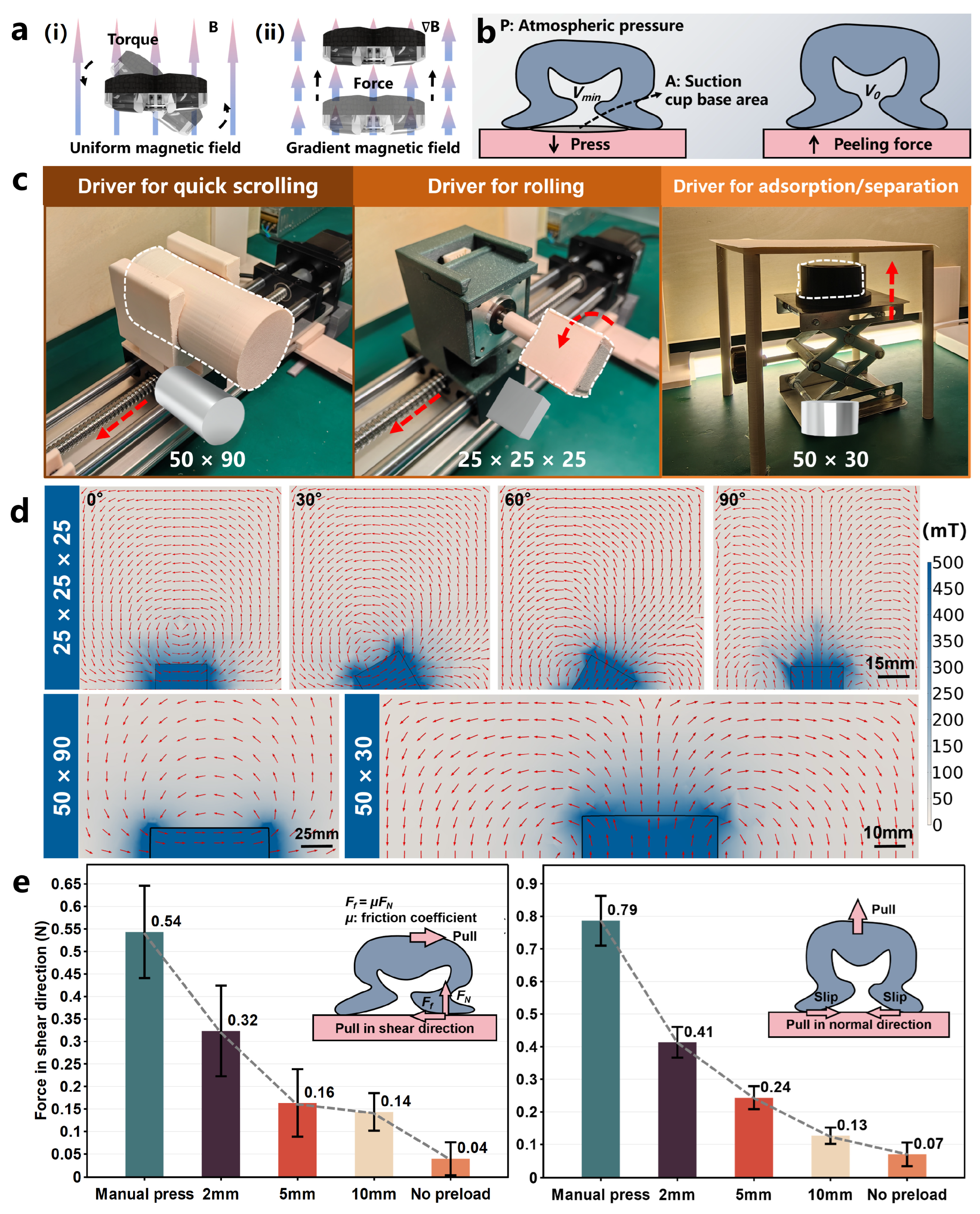
2.3. Principles of Motion and Adsorption in OISR
2.4. Driver Design and Magnetic Field Simulation
3. Results and Discussion
3.1. Assessment of Sucker Suction for OISR
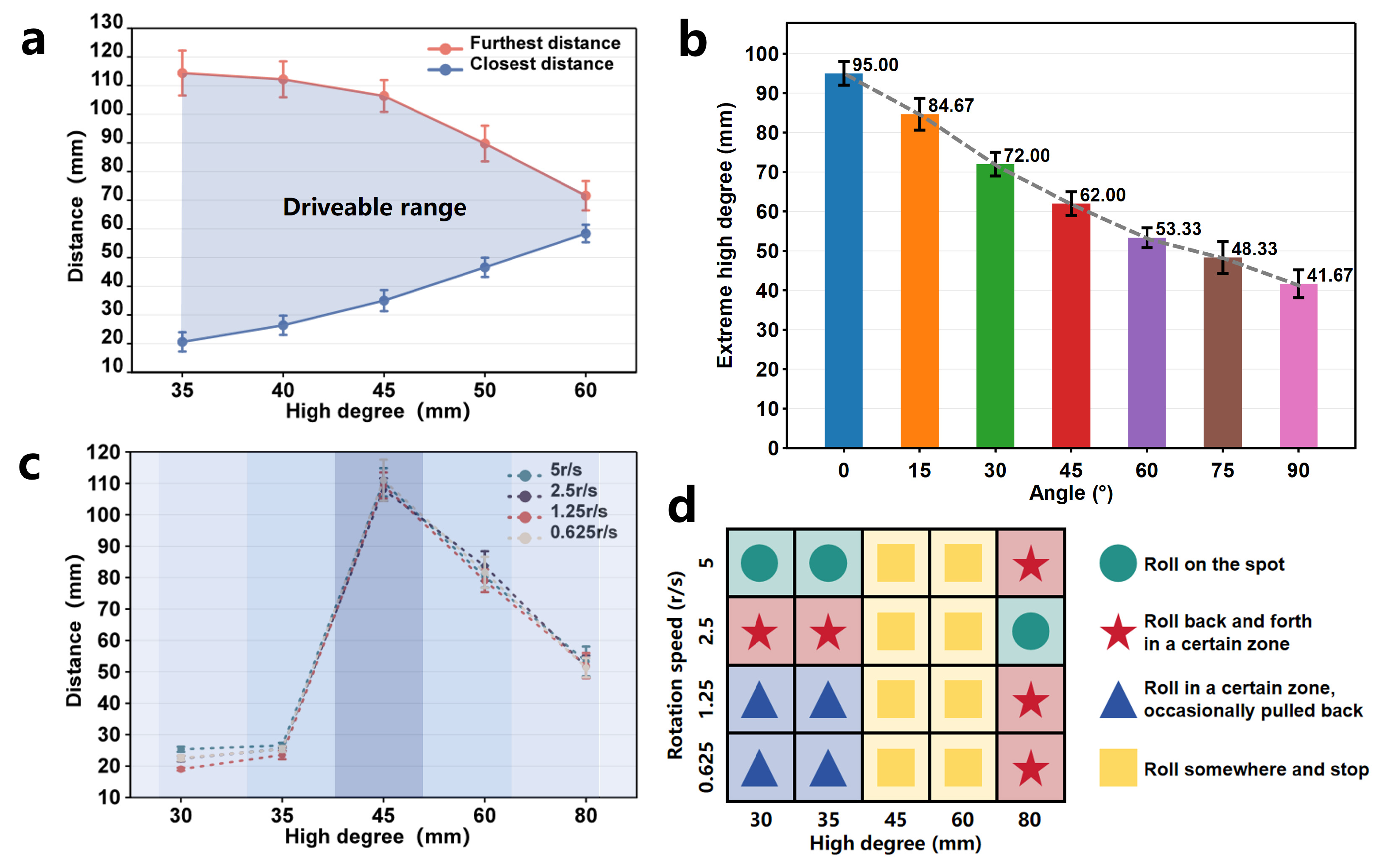
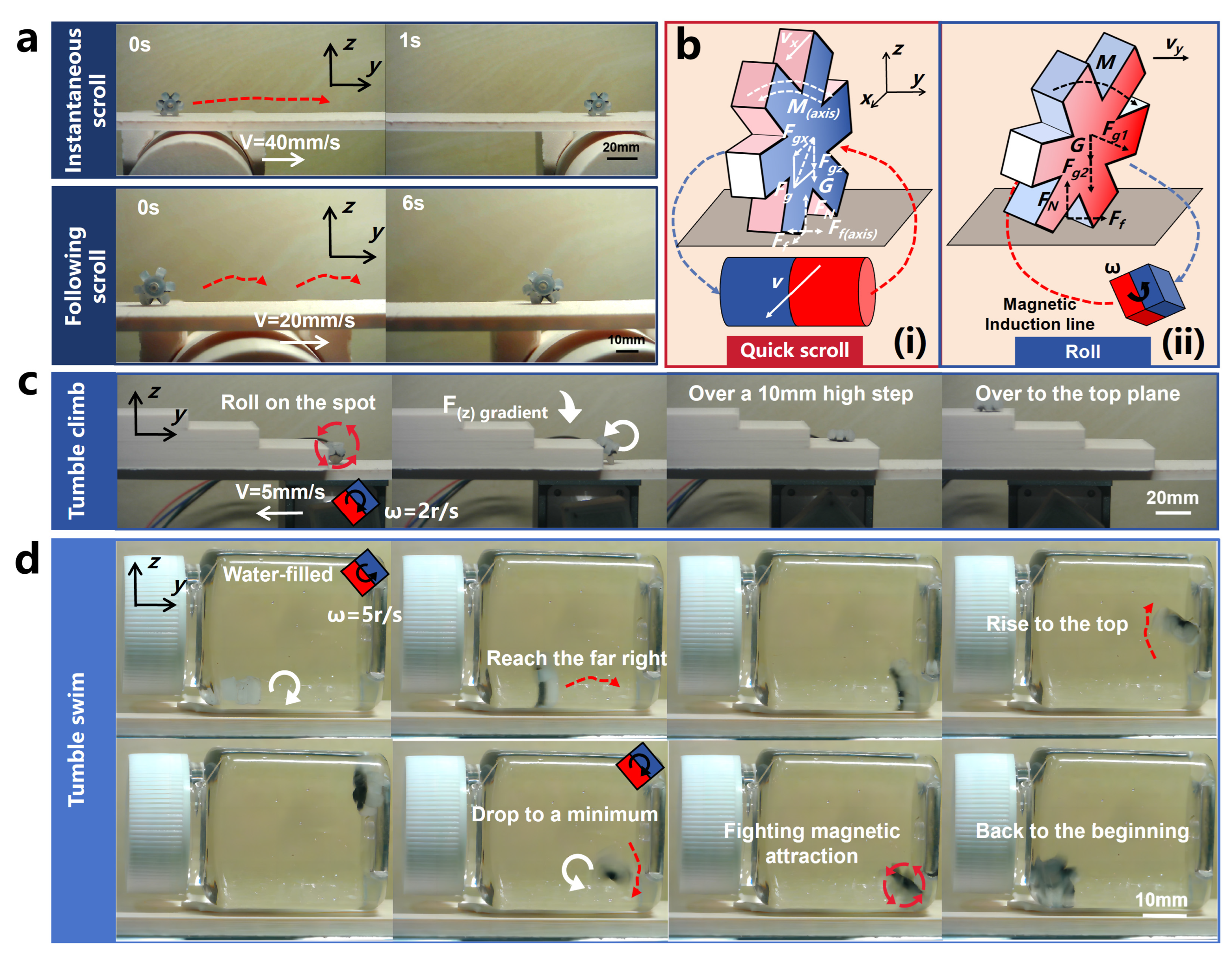
3.2. Kinematic Analysis of OISR
3.3. In Vivo Application of the OISR
3.3.1. Capsule Guidance In Vivo and OISR Release
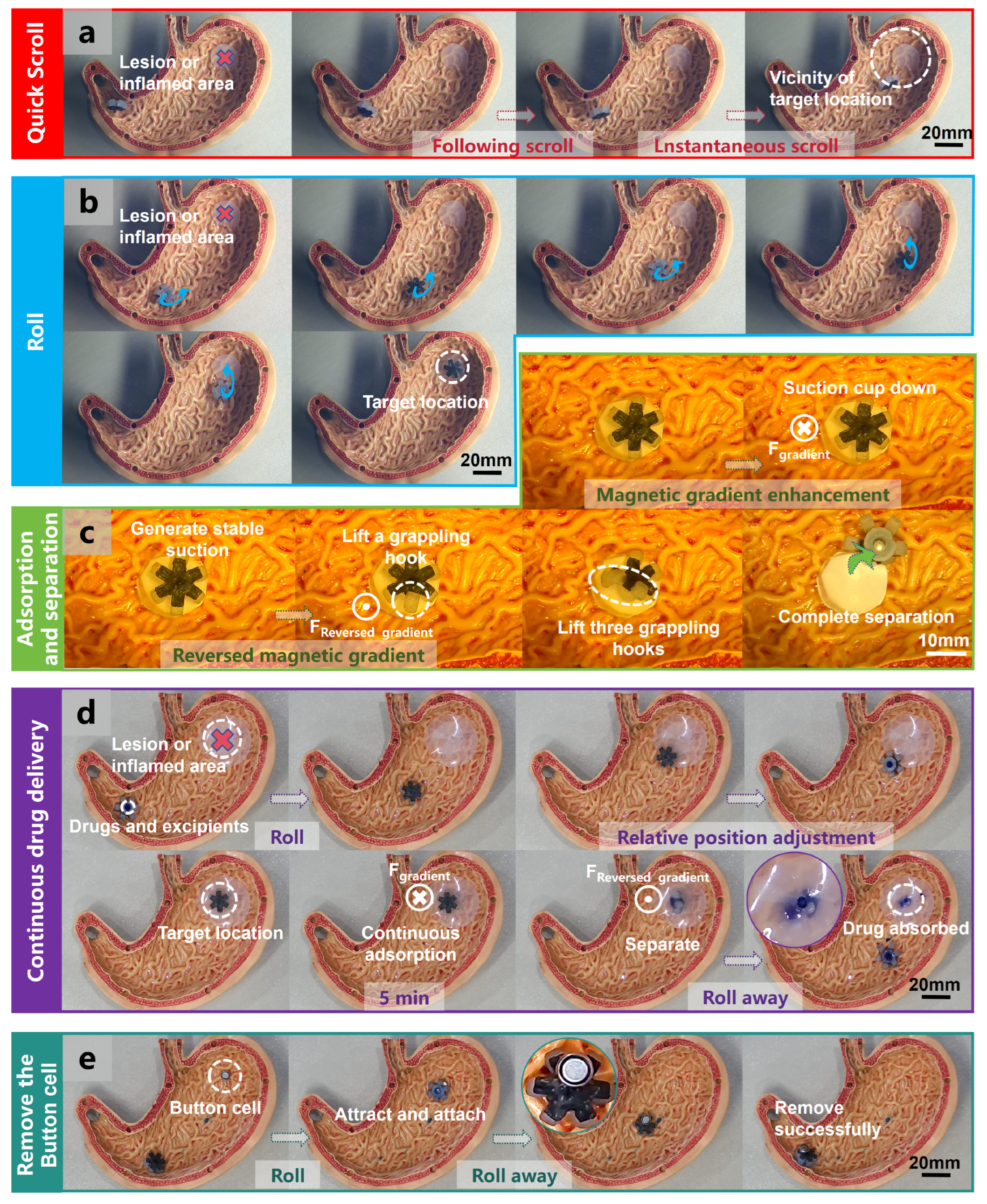
3.3.2. Application of the OISR in a Simulated Stomach
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Duan, W.; Yu, Z.; Cui, W.; Zhang, Z.; Zhang, W.; Tian, Y. Bio-Inspired Switchable Soft Adhesion for the Boost of Adhesive Surfaces and Robotics Applications: A Brief Review. Adv. Colloid Interface Sci. 2023, 313, 102862. [Google Scholar] [CrossRef]
- Wu, H.; Yang, G.; Zhu, K.; Liu, S.; Guo, W.; Jiang, Z.; Li, Z. On-skin Electrodes: Materials, Devices, and Systems of On-skin Electrodes for Electrophysiological Monitoring and Human–Machine Interfaces. Adv. Sci. 2021, 8, 2170007. [Google Scholar] [CrossRef]
- Chun, S.; Kim, D.W.; Baik, S.; Lee, H.J.; Lee, J.H.; Bhang, S.H.; Pang, C. Conductive and Stretchable Adhesive Electronics with Miniaturized Octopus-like Suckers against Dry/Wet Skin for Biosignal Monitoring. Adv. Funct. Mater. 2018, 28, 1805224. [Google Scholar] [CrossRef]
- Hong, Y.J.; Jeong, H.; Cho, K.W.; Lu, N.; Kim, D.-H. Wearable and Implantable Devices for Cardiovascular Healthcare: From Monitoring to Therapy Based on Flexible and Stretchable Electronics. Adv. Funct. Mater. 2019, 29, 1808247. [Google Scholar] [CrossRef]
- Liu, S.; Zheng, R.; Chen, S.; Wu, Y.; Liu, H.; Wang, P.; Deng, Z.; Liu, L. A Compliant, Self-Adhesive and Self-Healing Wearable Hydrogel as Epidermal Strain Sensor. J. Mater. Chem. C Mater. Opt. Electron. Devices 2018, 6, 4183–4190. [Google Scholar] [CrossRef]
- Huang, R.; Zhang, X.; Li, W.; Shang, L.; Wang, H.; Zhao, Y. Suction Cups-Inspired Adhesive Patch with Tailorable Patterns for Versatile Wound Healing. Adv. Sci. 2021, 8, e2100201. [Google Scholar] [CrossRef]
- Xie, Z.; Domel, A.G.; An, N.; Green, C.; Gong, Z.; Wang, T.; Knubben, E.M.; Weaver, J.C.; Bertoldi, K.; Wen, L. Octopus Arm-Inspired Tapered Soft Actuators with Suckers for Improved Grasping. Soft Robot. 2020, 7, 639–648. [Google Scholar] [CrossRef]
- Mazzolai, B.; Mondini, A.; Tramacere, F.; Riccomi, G.; Sadeghi, A.; Giordano, G.; Del Dottore, E.; Scaccia, M.; Zampato, M.; Carminati, S. Octopus-inspired Soft Arm with Suction Cups for Enhanced Grasping Tasks in Confined Environments. Adv. Intell. Syst. 2019, 1, 1970061. [Google Scholar] [CrossRef]
- Kim, J.M.; Coutinho, A.; Park, Y.J.; Rodrigue, H. Octopus-Inspired Suction Cup Array for Versatile Grasping Operations. IEEE Robot. Autom. Lett. 2023, 8, 2962–2969. [Google Scholar] [CrossRef]
- Baik, S.; Kim, D.W.; Park, Y.; Lee, T.-J.; Ho Bhang, S.; Pang, C. A Wet-Tolerant Adhesive Patch Inspired by Protuberances in Suction Cups of Octopi. Nature 2017, 546, 396–400. [Google Scholar] [CrossRef] [PubMed]
- Choi, M.K.; Park, O.K.; Choi, C.; Qiao, S.; Ghaffari, R.; Kim, J.; Lee, D.J.; Kim, M.; Hyun, W.; Kim, S.J.; et al. Cephalopod-Inspired Miniaturized Suction Cups for Smart Medical Skin. Adv. Healthc. Mater. 2016, 5, 80–87. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Hwang, G.W.; Lee, B.S.; Park, N.-J.; Kim, S.-N.; Lim, D.; Kim, D.W.; Lee, Y.S.; Park, H.-K.; Kim, S.; et al. Artificial Octopus-Limb-like Adhesive Patches for Cupping-Driven Transdermal Delivery with Nanoscale Control of Stratum Corneum. ACS Nano 2024, 18, 5311–5321. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Luo, H.; Linghu, C.; Song, J. Elastic Energy Storage Enabled Magnetically Actuated, Octopus-inspired Smart Adhesive. Adv. Funct. Mater. 2021, 31, 2009217. [Google Scholar] [CrossRef]
- Luo, Z.; Klein Cerrejon, D.; Römer, S.; Zoratto, N.; Leroux, J.-C. Boosting Systemic Absorption of Peptides with a Bioinspired Buccal-Stretching Patch. Sci. Transl. Med. 2023, 15, eabq1887. [Google Scholar] [CrossRef] [PubMed]
- Cui, C.; Liu, W. Recent Advances in Wet Adhesives: Adhesion Mechanism, Design Principle and Applications. Prog. Polym. Sci. 2021, 116, 101388. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, P.; Huang, H.; Zhu, J. Bio-Inspired Transparent Soft Jellyfish Robot. Soft Robot. 2023, 10, 590–600. [Google Scholar] [CrossRef]
- Li, W.; Chen, H.; Yi, Z.; Fang, F.; Guo, X.; Wu, Z.; Gao, Q.; Shao, L.; Xu, J.; Meng, G.; et al. Self-Vectoring Electromagnetic Soft Robots with High Operational Dimensionality. Nat. Commun. 2023, 14, 182. [Google Scholar] [CrossRef]
- Ong, H.; Lee, H.; Lee, J. Reprogrammable Ferromagnetic Domains for Reconfigurable Soft Magnetic Actuators. Nano Lett. 2020, 20, 7. [Google Scholar] [CrossRef]
- Liu, X.; Yang, Y.; Inda, M.E.; Lin, S.; Wu, J.; Kim, Y.; Chen, X.; Ma, D.; Lu, T.K.; Zhao, X. Magnetic Living Hydrogels for Intestinal Localization, Retention, and Diagnosis. Adv. Funct. Mater. 2021, 31, 2010918. [Google Scholar] [CrossRef]
- Mahoney, A.W.; Abbott, J.J. Five-Degree-of-Freedom Manipulation of an Untethered Magnetic Device in Fluid Using a Single Permanent Magnet with Application in Stomach Capsule Endoscopy. Int. J. Rob. Res. 2016, 35, 129–147. [Google Scholar] [CrossRef]
- Zhou, C.; Yang, Y.; Wang, J.; Wu, Q.; Gu, Z.; Zhou, Y.; Liu, X.; Yang, Y.; Tang, H.; Ling, Q.; et al. Ferromagnetic Soft Catheter Robots for Minimally Invasive Bioprinting. Nat. Commun. 2021, 12, 5072. [Google Scholar] [CrossRef] [PubMed]
- Ren, Z.; Sitti, M. Design and Build of Small-Scale Magnetic Soft-Bodied Robots with Multimodal Locomotion. Nat. Protoc. 2023, 19, 441–486. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Chen, X.; Yang, M.; Li, S.; Fan, X.; Zhang, H.; Xie, H. Triple-Configurational Magnetic Robot for Targeted Drug Delivery and Sustained Release. ACS Appl. Mater. Interfaces 2021, 13, 45315–45324. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.-W.; Sakar, M.S.; Petruska, A.J.; Pané, S.; Nelson, B.J. Soft Micromachines with Programmable Motility and Morphology. Nat. Commun. 2016, 7, 12263. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Wang, Y.; Chen, H.; Law, J.; Pu, H.; Xie, S.; Duan, F.; Sun, Y.; Liu, N.; Yu, J. A Magnetic Multi-Layer Soft Robot for on-Demand Targeted Adhesion. Nat. Commun. 2024, 15, 644. [Google Scholar] [CrossRef]
- Kim, J.; Chung, S.E.; Choi, S.-E.; Lee, H.; Kim, J.; Kwon, S. Programming Magnetic Anisotropy in Polymeric Microactuators. Nat. Mater. 2011, 10, 747–752. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Bae, S.; Lee, W.; Jang, G. Magnetic Navigation System Composed of Dual Permanent Magnets for Accurate Position and Posture Control of a Capsule Endoscope. IEEE Trans. Ind. Electron. 2024, 71, 739–748. [Google Scholar] [CrossRef]
- Chen, X.; Tian, C.; Zhang, H.; Xie, H. Biodegradable Magnetic Hydrogel Robot with Multimodal Locomotion for Targeted Cargo Delivery. ACS Appl. Mater. Interfaces 2023, 15, 28922–28932. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-Scale Soft-Bodied Robot with Multimodal Locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Xu, R.; Xu, Q. Design of a Bio-Inspired Untethered Soft Octopodal Robot Driven by Magnetic Field. Biomimetics 2023, 8, 269. [Google Scholar] [CrossRef]
- Xu, T.; Zhang, J.; Salehizadeh, M.; Onaizah, O.; Diller, E. Millimeter-Scale Flexible Robots with Programmable Three-Dimensional Magnetization and Motions. Sci. Robot. 2019, 4, eaav4494. [Google Scholar] [CrossRef]
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing Ferromagnetic Domains for Untethered Fast-Transforming Soft Materials. Nature 2018, 558, 274–279. [Google Scholar] [CrossRef]
- Zhong, S.; Xin, Z.; Hou, Y. Double-Modal Locomotion of a Hydrogel Ultra-Soft Magnetic Miniature Robot with Switchable Forms. Cyborg Bionic Syst. 2024, 6, 0077. [Google Scholar] [CrossRef]
- Lynch, W.J.; Carroll, M.E. Regulation of Drug Intake. Exp. Clin. Psychopharmacol. 2001, 9, 131–143. [Google Scholar] [CrossRef]
- Cohen, M.R.; Cohen, R.M.; Pickar, D. High-Dose Naloxone Infusions in Normals: Dose-Dependent Behavioral, Hormonal, and Physiological Responses. Arch. Gen. Psychiatry 1983, 40, 613–619. [Google Scholar] [CrossRef]
- Weishaupt, J.H.; Bartels, C.; Pölking, E.; Dietrich, J.; Rohde, G.; Poeggeler, B.; Mertens, N.; Sperling, S.; Bohn, M.; Hüther, G.; et al. Reduced Oxidative Damage in ALS by High-Dose Enteral Melatonin Treatment. J. Pineal Res. 2006, 41, 313–323. [Google Scholar] [CrossRef] [PubMed]
- Alavijeh, M.S.; Chishty, M.; Qaiser, M.Z.; Palmer, A.M. Drug Metabolism and Pharmacokinetics, the Blood-Brain Barrier, and Central Nervous System Drug Discovery. NeuroRx 2005, 2, 554–571. [Google Scholar] [CrossRef] [PubMed]
- Ze, Q.; Wu, S.; Dai, J.; Leanza, S.; Ikeda, G.; Yang, P.C.; Iaccarino, G.; Zhao, R.R. Spinning-Enabled Wireless Amphibious Origami Millirobot. Nat. Commun. 2022, 13, 3118. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, L.; Xia, N.; Yang, Z.; Zhang, C.; Pan, C.; Jin, D.; Zhang, J.; Majidi, C.; Zhang, L. Untethered Small-Scale Magnetic Soft Robot with Programmable Magnetization and Integrated Multifunctional Modules. Sci. Adv. 2022, 8, eabn8932. [Google Scholar] [CrossRef]
- Ye, Z.; Zheng, L.; He, J.; Lin, J.; Chen, Y.; Yu, H.; Wang, Y.; Zhong, W.; Handschuh-Wang, S.; Niu, S.; et al. Liquid-Metal Soft Electronics Coupled with Multi-Legged Robots for Targeted Delivery in the Gastrointestinal Tract. Device 2024, 2, 100181. [Google Scholar] [CrossRef]
- Yi, S.; Wang, L.; Chen, Z.; Wang, J.; Song, X.; Liu, P.; Zhang, Y.; Luo, Q.; Peng, L.; Wu, Z.; et al. High-Throughput Fabrication of Soft Magneto-Origami Machines. Nat. Commun. 2022, 13, 4177. [Google Scholar] [CrossRef]
- Vinarov, Z.; Abdallah, M.; Agundez, J.A.G.; Allegaert, K.; Basit, A.W.; Braeckmans, M.; Ceulemans, J.; Corsetti, M.; Griffin, B.T.; Grimm, M.; et al. Impact of Gastrointestinal Tract Variability on Oral Drug Absorption and Pharmacokinetics: An UNGAP Review. Eur. J. Pharm. Sci. 2021, 162, 105812. [Google Scholar] [CrossRef]
- He, J.; Zhang, Z.; Yang, Y.; Ren, F.; Li, J.; Zhu, S.; Ma, F.; Wu, R.; Lv, Y.; He, G.; et al. Injectable Self-Healing Adhesive pH-Responsive Hydrogels Accelerate Gastric Hemostasis and Wound Healing. Nanomicro Lett. 2021, 13, 80. [Google Scholar] [CrossRef]
- Zhao, P.; Xia, X.; Xu, X.; Leung, K.K.C.; Rai, A.; Deng, Y.; Yang, B.; Lai, H.; Peng, X.; Shi, P.; et al. Nanoparticle-Assembled Bioadhesive Coacervate Coating with Prolonged Gastrointestinal Retention for Inflammatory Bowel Disease Therapy. Nat. Commun. 2021, 12, 7162. [Google Scholar] [CrossRef] [PubMed]
- Xue, S.; Lu, Z.; Li, X.; Liu, R.; Zhao, Z.; Jing, H.; Fan, Q.; Liu, T.; Dezhkam, M. Experimental and Numerical Investigations on the Influence of Center-Hung Scoreboard on Dynamic Characteristics of Suspend-Dome Structure. J. Build. Eng. 2022, 57, 104787. [Google Scholar] [CrossRef]
- Kim, Y.; Zhao, X. Magnetic Soft Materials and Robots. Chem. Rev. 2022, 122, 5317–5364. [Google Scholar] [CrossRef]
- Fan, J.; Ren, S.; Han, B. Magnetic Fiber Robots with Multiscale Functional Structures at the Distal End. Adv. Funct. Mater. 2023, 34, 2309424. [Google Scholar] [CrossRef]
- Thanh-Vinh, N.; Takahashi, H.; Kan, T.; Noda, K.; Matsumoto, K.; Shimoyama, I. Micro Suction Cup Array for Wet/Dry Adhesion. In Proceedings of the 2011 IEEE 24th International Conference on Micro Electro Mechanical Systems, Cancun, Mexico, 23–27 January 2011. [Google Scholar]
- Yang, Z.; Zhang, L. Magnetic Actuation Systems for Miniature Robots: A Review. Adv. Intell. Syst. 2020, 2, 2000082. [Google Scholar] [CrossRef]
- Liu, D.; Jiang, P.; Wang, Y.; Lu, Y.; Wu, J.; Xu, X.; Ji, Z.; Sun, C.; Wang, X.; Liu, W. Engineering Tridimensional Hydrogel Tissue and Organ Phantoms with Tunable Springiness. Adv. Funct. Mater. 2023, 33, 2214885. [Google Scholar] [CrossRef]
- Chu, J.N.; Traverso, G. Foundations of Gastrointestinal-Based Drug Delivery and Future Developments. Nat. Rev. Gastroenterol. Hepatol. 2022, 19, 219–238. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tong, D.; Zhao, Y.; Wu, Z.; Chen, Y.; Xu, X.; Chen, Q.; Fan, X.; Yang, Z. Octopus-Inspired Soft Robot for Slow Drug Release. Biomimetics 2024, 9, 340. https://doi.org/10.3390/biomimetics9060340
Tong D, Zhao Y, Wu Z, Chen Y, Xu X, Chen Q, Fan X, Yang Z. Octopus-Inspired Soft Robot for Slow Drug Release. Biomimetics. 2024; 9(6):340. https://doi.org/10.3390/biomimetics9060340
Chicago/Turabian StyleTong, Dingwen, Yiqun Zhao, Zhengnan Wu, Yutan Chen, Xinmiao Xu, Qinkai Chen, Xinjian Fan, and Zhan Yang. 2024. "Octopus-Inspired Soft Robot for Slow Drug Release" Biomimetics 9, no. 6: 340. https://doi.org/10.3390/biomimetics9060340