4.1. Measurement and Measurer
The logic of the IC process, reviewed in
Section 3, proceeds backward in time. Therefore, applying the IC process to living systems requires transforming the process to a material (ontic) process proceeding forward in time. For this purpose, we require a general concept of a material entity functioning as a material subject, without recourse to specific entity models, such as molecules and cells. A cognizer is a material entity model, developed to explore the probability of events in living systems [
21,
24,
27].
A cognizer takes a specific state every moment in time and changes the state in relation to others. This related state-change is called “cognition”, which includes any material state-changes, physical or biological, including cognition in cognitive and brain sciences as a particular case. Each cognizer (
Ci) is identified with a pair of its motion function
fci and the state set or space (
Ci), i.e., (
fci,
Ci). Any system composed of cognizers in intercognition (or interaction) is called a cognizers system [
21,
24,
27].
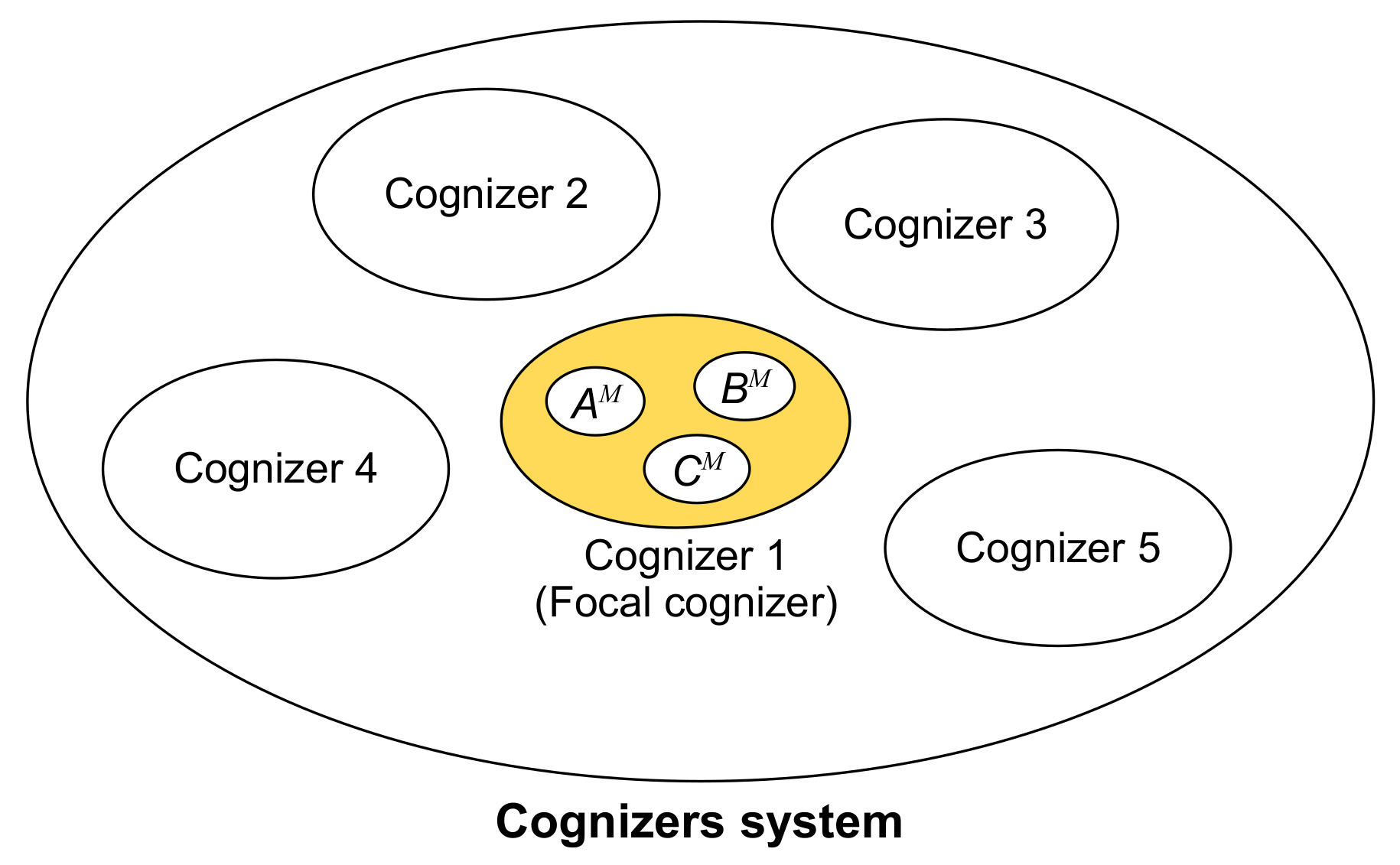
A “cognizers” system (“s” for cognizer) can be hierarchically organized in a nested fashion, where the parts constitute a whole synchronically or diachronically [
28]. A particular single cognizer can be a system of sub-cognizers, which is, therefore, called a “cognizer” system (no “s” for cognizer) when we focus on a particular cognizer as a system of sub-cognizers. In other words, a cognizers system is a system made of cognizers; and a cognizer (i.e., a system made of sub-cognizers) is an element of the cognizers system. In this paper, we take an internalist stance to the problem by dealing with a focal cognizer only, without considering other component cognizers that constitute the focal cognizer’s environment in the cognizers system (
Figure 2).
The IC model derives new symbols based on given differential state-changes from the same state (e.g., a0 → a0 or a1). To transform the derivation process into the cognizers-system model (CS model), we assume a focal cognizer (i.e., a subject system) to have a sub-cognizer that can “measure” something by one-to-many state changes. Here, we introduce the concept of “measurer”: Measurer is a class of cognizers with a property of returning to a baseline state under a particular environmental state after changing to different states. The baseline state is not necessarily unique but can be a plural number of states.
This concept grasps a particular property common in ubiquitous apparatuses for signal transduction or information transmissions, such as cell-surface receptors, ion channels [
29], molecular switches [
30], and neurons [
31]. The measurement by IC differs from measurement in the sense of observation; therefore, we call the former measurement “IC-measurement” to avoid confusion when necessary. The IC-measurement is not observation but the realization that it does not presuppose the existence of an object to be measured. It is a process of creating an object as an it-from-bit process. The IC-measurement is the derivation (generation) of symbols referring to object’s states by state changes of a measurer from a baseline state.
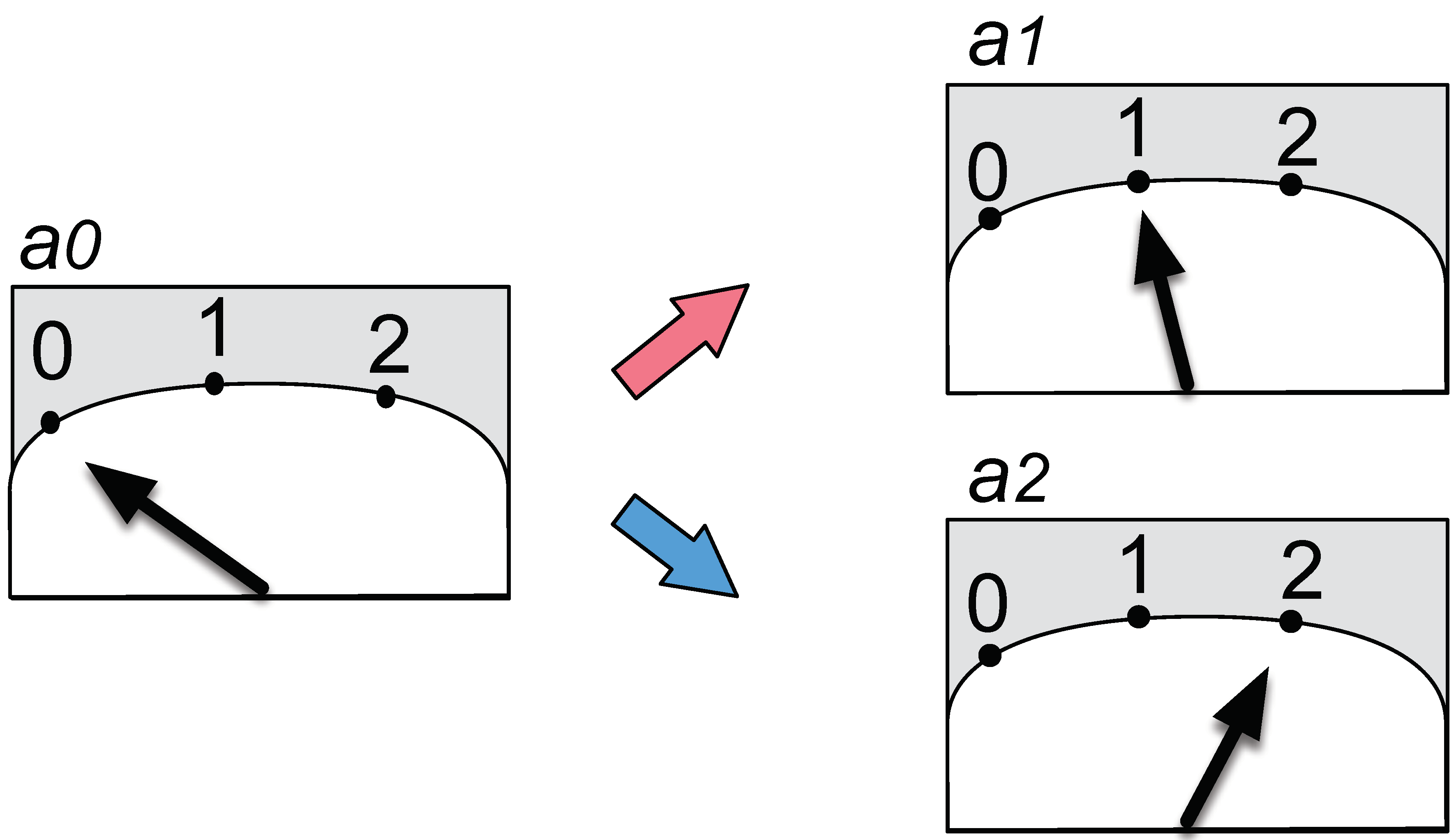
To illustrate the IC-measurement figuratively, consider two entities: a meter and a reader, without assuming any object measured by the meter (
Figure 3). Both constitute the subject; it is
not that the reader is the subject who reads the meter existing externally. Suppose that the meter is set in a baseline state (0), which then changes to a particular state 1 or 2. In a particular baseline state, the reader changes its state by reading 0 and, then, 1 (not shown in the figure). The reader can derive a difference between the first and the second
a0 (red or blue arrows) in the form of the reader’s states. Those states refer to different states of something measured by the meter. The meter corresponds to
A, while the reader corresponds to
B in the IC model (
Section 3). With this IC-measurement, something external is embodied as the reader’s state.
4.2. IC-Measurement in Cognizer: Two-Component Model
Let us represent the IC process-in-logic (
Section 3) using a cognizer system in the CS model. We suppose a focal cognizer as the subject, composed of sub-cognizers functioning as the measurers (
Figure 2). Serial actions of measurement (cognitions) are modeled for the IC process to operate functionally. One measurer’s state is measured by the second measurer, followed by the third measurer, and so on.
Let us begin with a simple case: a focal cognizer
S (Cognizer 1 in
Figure 2) is composed of two measurer cognizers,
AM (with state set
AM) and
BM (with state set
BM).
AM exhibits a sequence of states (i.e., sensor data), such as
a0,
a1,
..., which correspond to a sequence of
A used in the IC model (
Section 3.1). Another measurer (
BM) measures (reads)
AM’s state. The derivation of new symbols in sequence
BM based on
AM’s state changes can be represented as the
BM’s generation of a state sequence by cognizing
AM.
Table 1 shows a forward-in-time process within cognizer
S involving cognitions by measures.
In this model, each “state” of
S (
x,
y,
z in
Table 1) includes a “cognition” by two measurers (
AM,
BM); for instance, state x involves a lower-level cognition (
a0,
b0) → (
a0,
b0) from t0 to t1 in
Table 1. The measurers change their states on a fine-grained timescale, t0, t1, t2, …, tn, tn+1, tn+2. This modeling is introduced due to the assumption that the measurers return to a baseline state after a cognition(s), taking two time units. Therefore, a single state of
S includes one cognition taken by the measurers. Thus, the cognizer changes its states (i.e., cognition at the cognizer
S level) on a coarse-grained timescale:
x (T0),
y (T1), …,
x (TN),
z (TN+1). “TN” indicates the time when the same state of a cognizer (e.g.,
x) recurs as that which occurs at T0; “tn” indicates the time for the measurer level that corresponds to TN, as shown in
Table 1.
As shown in the IC process from Sequences (1a,b) (
Section 3.1), new symbols
b1 and
b2 are generated behind
a0, backward in time, based on a one-to-many correspondence, where
a0 →
a1 and
a0 →
a2, respectively. However, the cognizer model describes that
BM generates
b1 and
b2 by measuring
AM forward in time at t3 and tn+3 (
Table 1).
BM’s states,
b1 and
b2, are symbols that refer to states of something external to
S, measured (detected) by the
AM–
BM coupling (those states are supposed to occur on t0–t1 and on tn–tn+1 when
S is in state
x). This process is the realization of external reality.
Living systems, such as cells, have receptor proteins on their cell membranes. The receptors, the counterpart of
AM, take different molecular structures as their states, changing by ligand binding. This event triggers the production of another type of molecule called the second messenger. For a living cell, ligand molecules or stimuli are external entities that do not belong to the cell components. What is measured by
AM is external to
S, whose measurement is a reliable base for a subject cognizer
S to distinguish the events generated by things existing outside, from the events generated only by internal processes, such as hallucinations (see
Section 4.5).
Let us pay attention to the temporal framework of the model in
Table 1 (also applied to
Table 2 and
Table 3). The process of the subject cognizer (
S) is framed on two timescales at the level of measurers (t) and that of the system of measurers (T). In a hierarchical system, a process at a given level proceeds at a lower rate than processes at the component level [
28,
32,
33]. For example, a metabolic process of a cell can be described as changes in metabolites’ concentrations as cell states, which occur at a lower rate than chemical reactions between molecules. Similarly, an animal behavior can be described as changes in bodily states, which occur at a lower rate than the rate of changes in the membrane potential of the animal’s neural cells.
An internalist model focusing on a single cognizer (Cognizer 1 in
Figure 2) can describe it as a system organized in a nested hierarchy with a specific timescale (t or T) for each level of the system. Therefore, different timescales for different levels are defined within the internalist model. In contrast, when we take an externalist stance, in which a focal subject cognizer is described in relation to other cognizers in the environment (Cognizers 2–5 in
Figure 2), the externalist needs to coordinate the time occurring in different cognizers by introducing a common temporal framework in which they are situated.
4.3. IC-Measurement in Cognizer: Three-Component Model
In the model in
Table 1,
S is composed of
AM and
BM as a sensor and a signal transducer (information transmitter). Next, let us add another measurer for
BM to represent an effector; note that effectors can be measurers if they have a baseline state. For this development, we add a third measurer that measures
BM. We could also incorporate other classes of sub-cognizers that play roles in the metabolism and memory, including measurers and non-measurers. However, we omit them to focus on the percept (cognition)-reality problem extended to living systems.
For parsimony of character use and other reasons (
CM is used for the ICW process in
Section 4.6), let us replace
BM with
BM1 and add measurer
BM2 that measures
BM1.
BM1 and
BM2 have, respectively, the baseline states
b1
-0 and
b2
-0.
Table 2 shows a process of state changes of the three measurers. The measurers change their states on a fine-grained timescale, t0, t1, t2, …, tn, tn+1, tn+2. The cognizer changes its states on a coarse-grained timescale:
x (T0),
y (T1), …,
x (TN),
z (TN+1). “TN” indicates the time when the same state of a cognizer (e.g.,
x) recurs as that occurs at T0; “tn” indicates the time for the measurer level that corresponds to TN as shown in
Table 2.
BM2 discriminates between different BM1’s states, b1-1 (at t4) and b1-2 (at tn+4), changing to b2-1 (at t5) and b2-2 (at tn+5). This process indicates a distinction generated by AM–BM1 coupling is conveyed to BM2 (effector). Each “state” of S (x, y, and z) includes “cognitions” by three measurers, AM, BM1, and BM2; for instance, “state” x involves lower-level “cognitions”, (a0, b1-0, b2-0) → (a0, b1-0, b2-0) → (a0, b1-0, b2-0), from t0 to t2. BM2 functions as the effector that uses symbols generated by the IC-measurement of AM–BM1 coupling.
The IC operation-in-logic makes a perceptual sequence deterministic as described in
Section 3, whereas the state sequences of cognizer
S in the above representation (
Table 1 and
Table 2) do not fulfill the US principle. Their state changes are indeterministic:
(a0,
b0
) → (
a1,
b0
) or (
a2,
b0
) in
Table 1, and (
a0,
b1
-0,
b2
-0) → (
a1,
b1
-0,
b2
-0
) or (
a2,
b1
-0,
b2
-0
) in
Table 2 (see underlined parts). The reason for indetermination is because new IC-generated symbols come downstream (forward in time) in this model. The states
b0 and
b1 are generated, respectively, at t3 and tn+3 (red symbols, marked orange) in
Table 1. Likewise, the states
b1
-1 and
b1
-2 are generated at t4 and tn+4 (red symbols, marked orange), respectively, in
Table 2, although they are generated at t0 and tn by the IC logic (
Section 3).
The indeterministic changes imply that the subject cognizer is not a deterministic whole, but an open system in the sense that it is surrounded by the unknown external reality. The cognizer can generate symbols referring to states of the external reality, using its component measurers, such as BM or BM1. If a given cognizer is a deterministic whole, it is a closed system that cannot do the IC operation because it already fulfills the US principle.
However, a subject cognizer as an open system can manage consequent events deterministically in a sense, using IC-generated symbols by taking different cognitions (actions) to a given datum: from “(
a0,
b1
-0,
b2
-0)” at t2 or tn+2 to ”(
a0,
b1
-0,
b2-1)” at t5 or “(
a0,
b1
-0,
b2-2)” at tn+5, which affect events occurring at t6/tn+6 (“?” in yellow in
Table 2). We focus on this aspect of cognition in the next section.
4.4. IC-Generated Symbols for Adaptive Action
Thus far, we have focused on the distinction (“discrimination”) aspect of state changes to generate new symbols using IC operations. Another essential aspect of state change is what the CS model calls “selectivity” [
24]. Selectivity is defined as a cognizer’s property determining a particular state as the next among many potential states under a given environmental state to take a particular relation with the environment.
Selectivity plays a vital role in adaptive action. For example, consider a car driver observing a traffic signal, which becomes red, yellow, and green. The driver can distinguish each color from others; this is the discrimination ability of the driver. The driver has another property, which can potentially take many kinds of responses to each color: for instance, the driver could stop for green, go for red, and U-turn for yellow. This property is the “selectivity” in the driver’s state changes in relation to the signal states, which affects the events that the driver will experience.
In
Table 2,
AM,
BM1, and
BM2 are interpreted as a sensor, a signal transducer, and an effector of a living system, respectively. Now, let us ask: What determines the sensor (
AM) state at t6 or tn+6 (marked “?” in yellow in
Table 2)? The primary answer is in how the sensor’s state difference links to the effector’s state changes (
b2
-1 or
b2
-2), affecting the state-relation to the unknown external entities. A “How-link” indicates the selectivity aspect of cognition, which relates the focal cognizer to the external reality as a teleonomic property.
For example, this describes how neural cells are connected with other cells and how molecular reactions are connected with other reactions. Another factor is the unknown properties of the external entity. Any cognizer cannot completely control the events to experience using the discrimination ability and selectivity. This incomplete controllability is simply because the final relation between the subject and the environment is determined by the two. For example, an organism cannot manage its fate completely by its own ability when facing a predator.
4.5. IC Process in Bacterial Chemotaxis
Cells can generate symbols for the external entities’ states by producing molecules, called second messengers. Many bacterial species have chemotaxis for swimming toward a denser food area by sensing food molecules via receptor membrane proteins that can react to the molecules as a signal. When the flagella rotate counterclockwise (CCW), a bacterial cell swims in a smooth, directed manner. The smooth-swimming is interrupted when the flagella rotate clockwise (CW), which causes the bacterium to tumble and change its swimming direction [
34,
35].
Escherichia coli has five transmembrane proteins (methyl-accepting chemotaxis proteins, MCP), which are receptors for attractant and repellent chemicals [
36,
37]. For example, the Tar receptors bind to an amino acid (aspartate) directly. CheA, a histidine kinase, is tightly associated with and regulated by these receptors. When attractant stimuli, such as amino acids or sugars, do not bind to the receptors, their molecular configurations cause the activation of CheA, leading to the autophosphorylation of CheA. The phosphorylated CheA (denoted CheA-P), in turn, phosphorylates another kind of protein, CheY. The phosphorylated CheY (CheY-P) diffuses through the cell and encounters a flagellar motor. The CheY-P binds to a flagellar-motor-switch protein called FliM, making the rotation clockwise and the bacterium tumble [
35].
In contrast, when the amino acids bind to receptors as stimuli, the receptors change the molecular configuration, which does not activate CheA. The resultant decreases in CheA-P then decrease the concentration of CheY-P (i.e., an activated state). As a result, the flagellar motor rotates counterclockwise, making the bacteria swim smoothly. As a consequence, bacterial cells swim toward attractants or away from repellent molecules.
A baseline state of the receptor (MCP) can change by methylation from another protein (CheR). In other words, the methylated receptor (in another baseline state) reduces the affinity to bind stimulus molecules and, hence, increases the activation rate of CheA, leading to an increase in phosphorylated CheY, thereby making the flagellate tumble. This modification of the receptor molecules functions as an adaptation of the bacterial cell to a given stimulus concentration.
When the concentration of the stimulus becomes higher, the sensor now cannot activate CheA. This event leads to a decrease in CheY-P, making the bacteria swim in a smooth straight direction. In the chemotaxis system, the degree of methylation is a type of memory stored in the receptor’s molecular state. (Another protein CheB, in a phosphorylated (activated) state, can remove the methyl from methylated MCPs. However, the decrease in CheA-P by stimulus chemicals binding to receptors reduces the activated CheB, which then decreases the demethylation rate of MCP). With this methylation system, bacterial cells can detect changes in the stimulus concentration in their environments [
35].
We can interpret that these receptors and signaling molecules are the measurers in that they have activated states, returnable to an inactivated, baseline state. Here, the receptor protein (MCP) with CheA can correspond to
AM, CheY to
BM1, and
BM2 to the switch-protein-associated flagellar motor in
Table 2. In the IC process using the CS model, the measurers may have two more baseline states. By shifting to another baseline state, the measurers can change the measurement mode with different affinities, like methylated MCPs.
Lastly, imagine a bacterial mutant with a modified structure of signal receptors (MCP) that reacts to certain metabolites excreted through its membrane, instead of signal ligands coming from the environment; or a mutant producing a mutated CheY protein that can be phosphorylated (activated) by metabolites other than CheA-P. They may cause maladaptive flagellar mortar regulation for swimming, which may be considered a kind of hallucination in a living cell, similar to those in animals. During the long period of life evolution, there would likely occur many kinds of mutants that suffered from disorders causing inappropriate distinctions between entities of the two realms (external or internal origins).
4.6. ICW Process in Cognizer
As discussed in
Section 4.4, a focal cognizer, the subject, can manage consequent events occurring to the cognizer by taking different cognitions (actions) for a given sensor datum. However, if a given cognition is repeated more than two times in the long run, the cognizer may not necessarily obtain the same sensor data as a result. For example, consider a game in which a player draws one card from many lying on a table face down after shuffling. When the player repeats the game, he finds the same visual data about cards lying on a table face down after shuffling. Here, he takes a particular action of taking one card for each trial, but the results can vary for repeated trials depending on the cards’ configurations.
Therefore, the same action against different card configurations will result in different events occurring to the player. This kind of uncertainty in events occurring after a particular action (cognition) is due to non-discriminability among different configurations (states) of the environment. Consider another case where the cards are face up. The player can now take the same or different cards with certainty, depending on his discriminative selection or preference. This uncertainty originates from the different states of a hidden reality that can be derived by the IC operation on the whole sequence (ICW; Sequences (2a–c) in
Section 3.3). Here, “hidden” indicates a state or condition that cannot be measured by the
AM–
BM coupling, i.e., ICM (
Section 4.2 and
Section 4.3).
We can represent this IC process-in-logic using a cognizer system in the CS model as shown in
Table 3. Here, a focal cognizer is composed of the measurers,
AM,
BM, and
CM, i.e., a sensor, a signal transducer, and a hypothetical apparatus of the ICW operation to detect a hidden reality, respectively. Here, we omit the effector for simplicity in representation.
Table 3 modifies
Table 2 by adding the first block of state x of cognizer S and replacing
BM2 with
CM. The measurers change their states on a fine-grained timescale, t0, t1, t3, …, tn, tn+1, tn+2. The cognizer changes its states on a coarse-grained timescale:
x (T0),
x (T1),
y (T2), …,
x (TN),
x (TN+1),
z (XN+2). “TN” indicates the time when the same state change of a cognizer (e.g.,
x →
x) recurs as that occurs on T0–T1; “tn” indicates the time for the measurer level that corresponds to TN as shown in
Table 3.
S’s state changes (cognitions at the cognizer level) are “
x →
y” (T1–T2) and “
x →
z” (TN+1–TN+2). Using
BM’s non-unique state changes “
b0 →
b1” (t4–t7) and “
b0 →
b2” (tn+4–tn+7), the cognizer
S measures the external reality at T1 and TN+1, symbolized as
b1 and
b2, which corresponds to the process from Sequences (2a–c) in the IC model (
Section 3.3). As a result, the subject generates symbols
b1 and
b2, referring to different external states, which may be used for the effector’s differential actions (cognitions) to relate the subject to the environment, as discussed in
Section 4.3,
Section 4.4 and
Section 4.5.
Next, we focus on the same state changes (cognitions) “
x →
x” taken by the subject on two occasions, T0–T1 and TN–TN+1, but followed by different events:
y at T2 and
z at TN+2. The first cognition is followed by sensor datum “
a1” (at t6 on T2), whereas the second cognition is followed by “
a2” (at tn+6 on TN+2). This one-to-many correspondence is a chance event resulting from the non-discrimination between different states of the external reality, whose differences are hidden to the subject at t0/tn (on T0/TN). According to the logic of ICW, symbols for the hidden reality can be derived from the symbols of
B (
Section 3.3). Therefore, the third measurer,
CM, measures the difference to generate new symbols,
c1 and
c2, by discriminating between
b1 and
b2 on t7–t8 and tn+7–tn+8
However, according to the ICW logic, these newly derived symbols embodied as the states of CM are supposed to refer to the hidden reality states occurring on T0 and TN, which are backward-in-time references. This is hindsight. For living systems, such a hindsight derivation of hidden reality is too late to avoid chance events. How can the subject use what CM measures to regulate its effector for living processes?
One possible answer comes from the externalist view. Living systems need not discriminate every potential difference from others occurring in the environment. They need to discriminate only the external states that are relevant to their survival/reproduction. What should be discriminated can be classified into two classes: the first is the conditions (the environmental states) that directly affect the system’s activity, including physical, chemical, and biological states, and the second is the states that correlate with the first ones.
Living systems often use the second ones as signs for things that directly affect their living, such as food and natural enemies. Suppose that AM measures the states of a sign for something dangerous for a focal subject organism, for instance, a predator. The events occur for an external observer as follows (arrows indicates the temporal order): a predator comes near (T0) → the surrounding air vibrates, making a particular sound (T1) → the organism hears the sound (T2).
AM (the organism’s sensor) measures the sound on T2,
BM (signal transducer) measures
AM, making a symbol (
b1) referring to the sound state on T2, and
CM (hypothetical apparatus) measures
BM, making a symbol (
c1) referring to the dangerous state on T2.
CM is not a transducer of the sound symbols
BM makes but an interpreter of them. In this case, the organism made the IC-measurement of the hidden reality, a predator, mediated through measuring the air states. If symbol
c1 is used to link the effector appropriately (not shown in
Table 3), the organism could escape the predator in time. Here, the symbol has a particular meaning, a “danger”. The uncertainty regarding the surrounding air does not matter to the subject, for whom hidden danger does matter. Similarly, visual images of something are signs of an object (e.g., a predator). The eyes measure the surrounding photon field state, not the object. “A predator” is an interpretation of a given state of the photon field; different things might exist behind the visual scene.
In the above event line, let us replace an organism with a quantum physicist, the air with an experimental measurement apparatus, and a predator with the quantum reality. In this experiment, the physicist measures the apparatus states, not the hidden quantum reality, just as the organism measures the air states. From a realist stance, the apparatus is supposed to measure the quantum reality (hidden to the physicist) just as the air measures the predator (hidden to the organism). Wheeler’s “it” is derived from the “apparatus-elicited” answer to yes or no questions (
Section 1) [
17]. The symbols referring to the quantum-reality states (
c1 and
c2 in
Table 3) can be derived by ICW, the contraposition of the US principle (
Section 3.1). It is enigmatic that a symbol for a quantum reality (“it”) is detected using the US principle at the whole level (ICW), which is equivalent to the determinist principle [
38] (Section 3.4).
Finally,
CM may play a role in reducing the uncertainty of events by discovering a particular subset of sensor data (not
AM in
Table 3) unused for the IC-measurement processing by the subject but that highly correlates with
CM’s state. This process may relate to learning. By using such data, the subject can reduce the uncertainty in events occurring at t6/tn+6. This process is the counterpart of seeking hidden parameters to develop a deterministic theory in quantum physics.
The search for sensor data to reduce the uncertainty of events may closely relate to one aspect of active inference proposed by Friston [
3,
4,
5] in brain science, suggesting that the brain samples sensory data (signals) selectively so to minimize uncertainty (entropy) in a posterior probability distribution. However, controversy remains on the generality of this principle [
39]. Fiorillo [
40] points out that, in animals, the “gaze is directed not to the static and predictable parts of a visual scene but to the dynamic and uncertain parts. Exploration provides the brain with new information from its environment.” His point closely concerns the previous argument that living systems use signs for reducing the uncertainty of correlated events that can directly affect their survival and reproduction. The uncertainty of sensory data about the signs does not appear to be harmful to living systems.






{kind=link}
{kind=link}
{kind=link}