1. Introduction
During the design and development stage of a haptic simulation system, designers of such systems must make various decisions and selections that contribute toward creating an engaging and, more importantly, useful simulation. These decisions may include the choice of the software language and development environment, pedagogical aspects in line with the learning outcomes, components of the user interface (such as easy access to relevant parameters of the simulation), and the haptic interface (one with sufficient force resolution and capacity, for instance). The choice of the haptic device also determines how users should interact with the simulation such as by using a stylus or a thimble, and how this stylus/thimble can be operated by the user to control the user’s interaction comfortably and accurately with that virtual environment as part of the simulation. While users interact with a virtual environment using a haptic device, they employ a joint of the arm (e.g., elbow or wrist joint) as the pivot joint; that is, they use a joint of the arm as the support point to control the haptic device during haptic exploration. Naturally, this choice is generally affected by both the selected haptic device and the purpose of that simulation. For instance, a simulation that trains osteopathic medical students in palpation may require trainees to use their entire arm during haptic exploration, and therefore, users may tend to utilize their shoulder joint as the pivot joint [
1]. On the other hand, a simulation that promotes the usage of a stylus as the proxy for a physical tool (e.g., a simulation for dentistry students) may require trainees to use their wrist or elbow as the pivot joint [
2,
3]. In addition to these simulation-specific requirements, some simulations may provide the users with the freedom to choose their own pivot joint during haptic exploration; in that kind of scenario, different users utilize different pivot joints based on individual preferences.
During virtual exploration, if the users are in control of their actions while initiating the touch, it is defined as active touch; on the other hand, in passive touch, a haptic interface or external stimulus is used to simulate the touch [
4]. This potential variability in identifying the pivot joint stems from the fact that most tasks involving (active/passive) touch without restrictions can be performed using any joint of the arm as the pivot joint. This brings up the question: Could we, as prospective users or the designer of a haptic simulation, intentionally select that pivot joint beforehand for a better outcome (increased level of accuracy and speed, higher efficiency, etc.) on a specific task? Better yet, by training ourselves using a specific joint of our arm as the pivot, could we learn to adopt that same palpation approach in real life for a better outcome (e.g., for a more accurate palpatory diagnosis/treatment by a doctor of osteopathy or a veterinarian)? To the best of the authors’ knowledge, there has not been a study to date that directly investigates the effect of the pivot joint on the task performance of haptic simulation users. Therefore, this study aims to take the first step toward investigating the effect of the human arm’s pivot joints on the performance of a haptic-related task. Although there are many aspects of touch that define the quality of information we receive through the action of touch, we have specifically chosen the stiffness discrimination task during haptic exploration, as it lends itself to relatively straightforward implementation in a psychophysical experiment and has a wide application area including medicine and education. Other alternative tasks such as force angle and height discrimination are also possible and planned for the future.
Stiffness discrimination has been an active area of research to study the properties of objects in virtual environments [
5,
6]. A few examples are given here, as they use similar concepts that were used in the current study. Genecov et al. [
7] analyzed the non-linear stiffness and geometry of a jamming device using just noticeable difference (JND) as a parameter for examining human perception. The just noticeable difference is defined as the minimum stiffness difference between the objects detectable by a user [
8]. Fu et al. [
9] discussed the basic principles of just noticeable difference (JND) associated with human haptics in observing mechanical force feedback properties. The ratio of JND to the standard stiffness expresses the Weber fraction of any sensory modality, which indicates the sensitivity toward stiffness discrimination ability, i.e., a lower Weber fraction designates better stiffness discrimination ability [
10]. The Weber fraction is a well-established parameter to analyze psychophysical responses to human perception of stiffness [
11]. Maereg et al. [
12] developed a wearable vibrotactile haptic device to use for stiffness discrimination in virtual interactions and used Weber fractions for quantitative analysis. They used the wearable haptic device at the wrist joint for this experiment and found that the average Weber fraction values for ten participants were 0.39 for visual feedback only 0.24 for tactile feedback only and 0.25 for both feedbacks combined. De Gersem [
13] utilized a PHANToM 1.5 haptic device and estimated the elbow joint’s Weber fractions were between 0.08 and 0.12 for their experiment. Son and Park [
14] developed a wearable haptic system for hand palms and fingers to improve the tactile perception of bulky objects. They calculated the Weber fraction for their wearable haptic interface for the palm and finger separately and together at a range of 0.3 to 0.6 approximately. Karadogan et al. [
15] analyzed the Weber fraction for four different standard stiffness values (0.25, 0.50, 1.00, and 1.25 N/mm). They used the metacarpophalangeal joint as a pivot point to explore two virtual cylinders with stiffness differences. The Weber fraction for four standard stiffness was 0.2, 0.27, 0.26, and 0.3, respectively.
In the current study, we examined the effect of different pivot joints of a human upper limb through comparative analysis at a stiffness discrimination task. Four pivot joints of the arm (metacarpophalangeal joint of the index finger, wrist joint, elbow joint, and shoulder joint) were evaluated by means of a psychophysical experiment to analyze the Weber fractions, average palpation speed, and average palpation force during a stiffness discrimination task. The following sections of the paper detail the methodology and results of the experiment, and the discussion of these results.
2. Methodology
2.1. Experimental Setup
As shown in
Figure 1, the experimental setup was composed of three main components: a computer software module (i.e., the virtual environment), a haptic device (Geomagic Touch
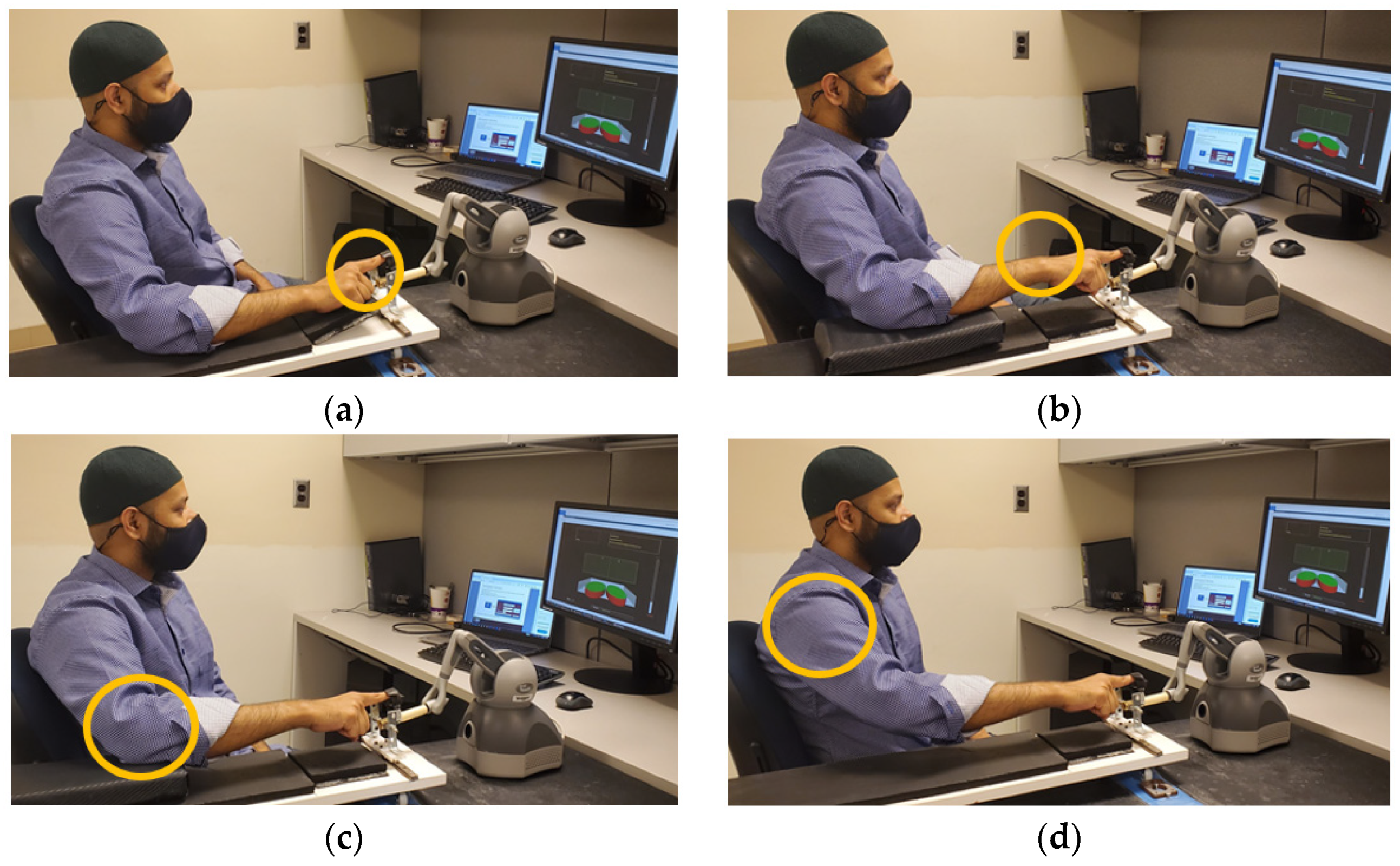
TM by 3D Systems) to establish the interface between the participant and the computer software, and an arm restraint table to place the participant’s arm. In
Figure 1, the arm’s position in four different sessions is shown. While using the metacarpophalangeal joint (
Figure 1a) of the index finger as the pivot joint, the participants placed their forearm on an arm pad and their hand against a hand rest while moving the finger-holder on the haptic interface with their index finger of the dominant hand. For the wrist joint (
Figure 1b), the participants could move their hands from the wrist joint as the hand rest was folded down, and any movement of the elbow was restricted by means of padding under the forearm. In the session with the elbow joint as the pivot joint (
Figure 1c), the participants used their elbow to receive support from the arm pad—the elbow, wrist, and metacarpophalangeal joint moved freely. When the participants used the shoulder joint as the pivot joint (
Figure 1d), they did not receive any support at all from the arm pad and could use the haptic interface by using their shoulder as the pivot joint.
2.2. Software and Virtual Environment
For this experiment, we created a virtual simulation of two computer-generated cylinders with different stiffness values. The participants used this simulation to explore the upper surfaces of those cylinders. Microsoft Visual C++ and the OpenGL graphics library were used to generate the graphical interface that is compatible with any desktop or laptop computer [
15]. OpenHaptics
TM Toolkit was used as an interface between the software and the user. We used an Intel(R) Core (TM) i7-6700 computer with a 64-bit Operation system, Windows 10 Education edition, 16.0 GB RAM, and an NVIDIA Quadro M2000 video adapter. The user interface is shown in
Figure 2, which contains two virtual three-dimensional cylinders (numbered 1 and 3), response feedback of the last trial, device status, and a timer to display the remaining trial time. This simulation also allows the user to pause it at any time using the “P” key from the keyboard.
2.3. Haptic Interface and Hardware
Geomagic TouchTM (3D Systems, Inc.) was used as the haptic interface. This device was modified to use with the index finger through a custom-made stylus. The device has three degrees of freedom, and at the three axes, the stiffness limits are 1.26 N/mm, 2.31 N/mm, and 1.02 N/mm, respectively. According to the device specifications, the maximum exertable force is 3.3 N at any nominal position.
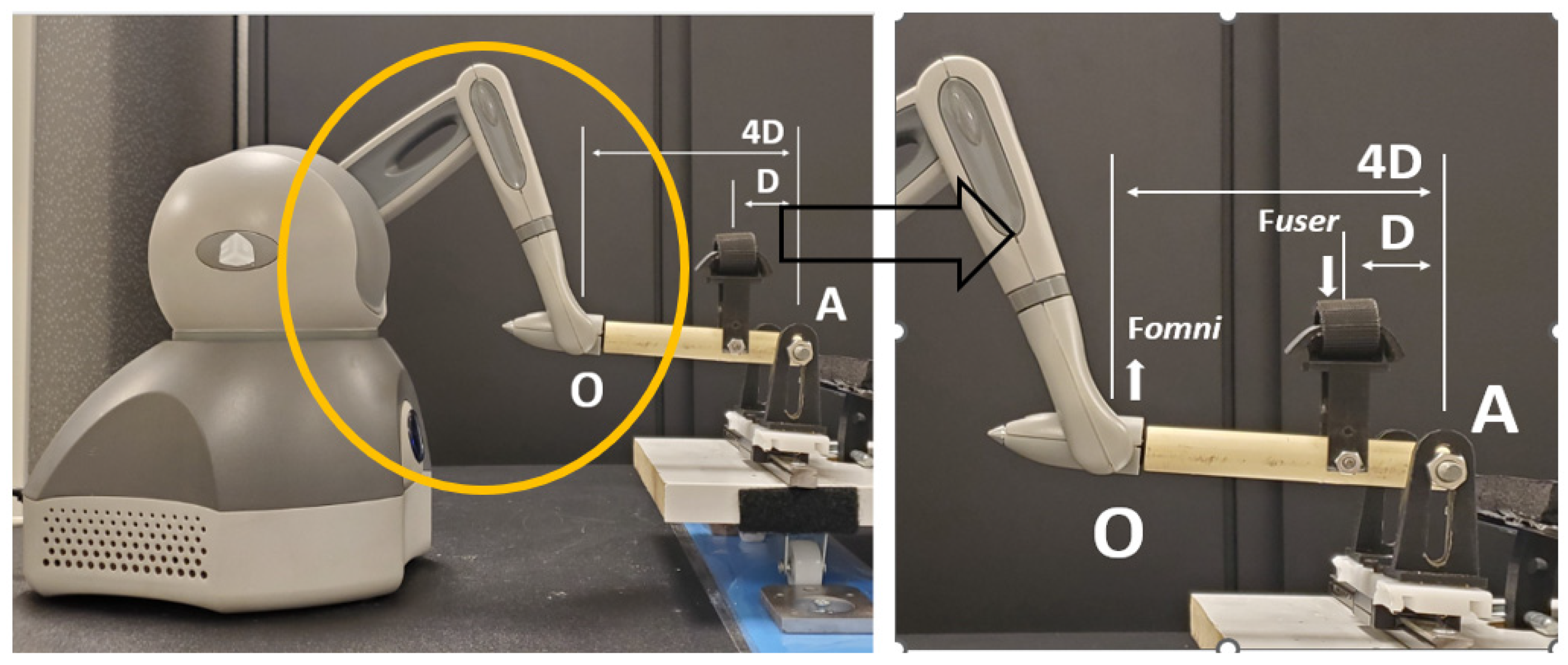
The custom-made stylus was designed aiming to quadruple the haptic device’s maximum exertable force. The haptic device with a modified finger stylus and a shifted pivot point is shown in
Figure 3. The pivot point of the Geomagic Touch
TM haptic interface shifts from point “O” to point “A” to increase the exertable force on “O” (F
omni) by four times when the user is applying force (F
user) on the finger stylus [
16]. The modified stylus can rotate about point A and move in a horizontal direction (in and out of the page) through the linear guide rail. To ensure that the participants can control the stylus comfortably during the experimentation, their index finger is comfortably wrapped using an adjustable strap around the finger holder.
A custom-made portable ambidextrous arm restraint setup (
Figure 4) was constructed to install the modified stylus of the Geomagic Touch
TM haptic device. The setup included a padded surface and a folding palm rest that allowed the isolation of the arm’s pivot joints. It had the ability to support the arm’s movement at the index finger, wrist, and elbow joints.
2.4. Participants
In total, 40 participants (15 female and 25 male) between 18 and 30 years of age (mean ± standard deviation = 21.7 ± 3.4) were recruited for this study. As prior technical knowledge was not necessary, any interested candidate without known neuromuscular abnormalities, injuries (fractures, etc.), and/or orthopedic procedures of the dominant hand could participate. This study was conducted with approval from the Institutional Review Board (IRB) at our institution. Each participant signed two consent forms before participation: one informed consent form about this experiment and another consent form for COVID-19 precautionary awareness. Out of the 40 participants recruited, 2 participants’ data were removed after we detected them as outliers using the three-sigma test based on the Weber fractions calculated across all sessions. Therefore, the data from 38 participants (25 male and 13 female) were considered for the analyses.
2.5. Experimental Procedure
We tested the effect of four separate pivot joints (the metacarpophalangeal joint of the dominant index finger, wrist, elbow, and shoulder joints) on the stiffness discrimination thresholds. For instance, the elbow joint as the pivot meant that the participant placed his/her elbow on a padded surface for supporting the movement of the joints that are distal to the elbow. In a similar manner, for the shoulder pivot joint, the arm was allowed to move freely without placing it on any surface at any portion of the arm while keeping the torso stationary. We focused on only the proprioceptive feedback from the joints that are actively utilized during haptic exploration while judging the relative stiffness of the two virtual surfaces. Therefore, by controlling the pivot joint during the haptic exploration, we aimed to find out any patterns in individuals’ sensitivity to discriminate stiffness when the actively utilized joints were varied.
The experimentation was completed in four sessions with each session taking about 30 min. The participants were allowed to perform only one session per day. The joint order in the four sessions for each participant was randomized. The participants explored the computer simulation of two virtual cylinders. The upper surfaces of these two cylinders were designated with different stiffness values. The participants were requested to identify the stiffer surface in between the two surfaces based on a two-alternative, forced-choice procedure. They were given a 15 s time limit per trial to feel the stiffness of the simulated cylinders. The participants were asked to record their response to the stiffer side by selecting either “1” or “3” from the keyboard. A staircase procedure [
16] was used to decide when to update the stiffness difference between the two surfaces; four incorrect answers in a row or not obtaining three correct answers in a row in ten consecutive trials resulted in an increase (the difference was too small to be detected by the participant), and three correct answers in a row resulted in a decrease in the stiffness difference (the stiffness difference was detectable by the participant beyond random chance).
Figure 5 presents a sample of the data to demonstrate this approach. If the participant did not record any response within 15 s, the response for that trial was considered as a wrong response.
One of these two cylinders had a stiffness value of 1.00 N/mm (standard side), and the other side had a stiffness value ranging from 0.5 to 0.99 N/mm (comparison side) [
17]. The standard stiffness side was randomly assigned to the left or right cylinder for each trial. The comparison side had eleven levels of stiffness changing between 0.50 and 0.95 N/mm with 0.05 N/mm increments and 0.99 N/mm, which also prescribed the step size when the stiffness difference needed to be adjusted.
Each session was composed of several trials, and the total trial numbers in a session depended on each participant’s capability to identify the stiffer side correctly throughout the experiment. The sessions ended after six reversals. A reversal is defined as the change in the opposite direction, such as the stiffness level decreasing after an increase or vice versa.
Figure 5 displays the change in the stiffness of the comparison side (the standard side is always at 1.00 N/mm) and the use of reversals on actual participant data.
2.6. Data Collection and Analysis
The data collected for each session were composed of three parts: the comparison side’s stiffness value for all trials, palpation speed, and palpation force. We used the Weber fraction, which is widely used to evaluate human perception using psychophysical responses, in order to determine the sensitivity of the participants to stiffness difference. The Weber fraction for each joint of a specific participant was computed from the ratio of just a noticeable stiffness difference to the standard stiffness value [
18] using the following equation:
where the just noticeable difference (JND) is defined as the smallest detectable stiffness difference between the two cylinders. A lower Weber fraction implies better stiffness discrimination ability. Since the stiffness value of the comparison side changed throughout a session, we used the average of the last three reversals as the stiffness value of the comparison side.
The palpation force and velocity vectors at each session were recorded directly from the OpenHaptics Toolkit and Geomagic TouchTM haptic device through predefined functions. We collected the data for each trial, while the cursor touched the virtual cylinders’ upper surface. From the dataset, we extracted the magnitudes of palpation velocity (palpation speed) and palpation force vectors at four pivot joints. The palpation speed and palpation forces of the standard side only were taken into consideration because this side maintained the fixed stiffness value of 1.0 N/mm across all sessions. Palpation forces were calculated utilizing Hooke’s law. The average value of palpation speed and force values for all trials in each session were computed and considered in the data analyses.
Out of the 40 participants recruited, 2 participants’ data were removed after we detected them as outliers using the three-sigma test based on the Weber fractions calculated across all sessions. Therefore, the data from 38 participants (25 male and 13 female) were considered for the analyses. The age range of the remaining participants was 18 to 30 years with a mean age of 21.7 years and a standard deviation of 3.4 years. Upon normality check, a repeated-measure ANOVA was used to examine the statistical significance of the Weber fraction values, average palpation forces, and speed across the four pivot joints. Bonferroni’s confidence interval adjustment was used for post hoc analysis. The correlation between the average palpation speed with respect to the Weber fraction was analyzed using the Pearson product–moment correlation coefficient.
3. Results
We analyzed the average Weber fraction, palpation speed, and palpation force by evaluating the effect of four pivot joints on stiffness discrimination. The results are categorized in the following subsections based on the Weber fraction, palpation speed, and palpation force.
3.1. Weber Fraction
The average Weber fraction values when the metacarpophalangeal joint of the index finger, wrist joint, elbow joint, and shoulder joint was used as the pivot joint and their corresponding standard errors were 0.1423 ± 0.017, 0.1279 ± 0.014, 0.1276 ± 0.013, and 0.1150 ± 0.012, respectively. As shown in
Figure 6, the Weber fractions decreased monotonically as the pivot joint moved from the metacarpophalangeal joint to the shoulder joint. The average Weber fractions for the wrist and elbow joints were very close to one another. The change in Weber fractions across the four pivot joints was not statistically significant (
p > 0.05 for all joints). The weber fraction values across different joints were analyzed for male and female participants separately. This analysis did not reveal any apparent pattern for the joints and was not statistically significant across the joints (
p > 0.05), which suggests that the gender of the participants had no effect on their performance in the haptic exploration.
3.2. Palpation Speed
The average palpation speed values of the participants for the standard stiffness side are shown in
Figure 7. The average palpation speed for the metacarpophalangeal joint of the index finger, wrist joint, elbow joint, and shoulder joint and their corresponding standard errors were 18.1375 ± 1.276 mm/s, 19.5747 ± 1.604 mm/s, 17.0552 ± 1.359 mm/s, and 20.0833 ± 1.466 mm/s, respectively. The average palpation speed for the elbow joint was the lowest, while the shoulder joint had the highest value. The repeated-measure analysis of variance across the four joints indicated that there was no significant difference in the palpation speed between the joints (
p > 0.05). We also did not observe any significant correlation between the average Weber fractions and the average palpation speeds of the standard stiffness side for any of the four joints. There was also no apparent pattern in the average palpation speeds between the male and female participants.
The experimental procedure suggests that the stiffness difference between the two surfaces tended to decrease with an increasing number of trials in any given session.
Figure 8 clearly illustrates the decrease in the average stiffness difference values across the four joints, as represented by quartiles based on the trial numbers. The repeated-measure analysis of variance revealed that there was a significant difference between the first and second quartiles and other quartiles’ values (
p < 0.05), but the third and fourth quartile values were close to each other and showed no statistical significance in any of the analyzed joints. Therefore, we further dissected the palpation speed data into quartiles to potentially observe any patterns that may diminish in the aggregated data for any given session.
The palpation speed on the standard stiffness side recorded in the simulation for each participant’s response was separated into four divisions based on the quartiles of total trial numbers. The average of the palpation speed values of each 25% of the total trial numbers was calculated and is illustrated in
Figure 9 for the four pivot joints. It can be observed from
Figure 9 that the participants monotonically increased their average palpation speed on the standard stiffness side (1.00 N/mm) through the quartiles for all four joints. This showed that the participants in general had a tendency to increase their average speed across the quartiles with declining relative stiffness difference.
We analyzed the differences in average palpation speed using the repeated-measure analysis of variance within the quartiles. For the metacarpophalangeal and elbow joints, the values of average palpation speed of the first quartile were significantly different from the values of other quartiles. For the wrist joint, only the values of the first and third quartiles were significantly different. For the shoulder joint, the values of the first quartile had statistically significant differences from those of the third and fourth quartiles. There was no significant difference among the palpation speed values of other quartiles.
3.3. Palpation Force
The average palpation force for the metacarpophalangeal joint of the index finger, the wrist joint, the elbow joint, and the shoulder joint were 8.8439 ± 0.513 N, 9.7273 ± 0.799 N, 9.4554 ± 0.813 N, and 10.0812 ± 0.675 N, respectively (
Figure 10). The average force values increased as the pivot joint moved from the metacarpophalangeal joint to the shoulder joint, while at the wrist and elbow joints, they were similar. There was no significant difference between these four average palpation forces. The male and female participants performed without any significant difference.
The four quartiles’ data of average palpation forces for the four joints were also computed (
Figure 11). This computation drew a conclusion resembling the observation we found for the average speed. The average force values increased as the stiffness difference decreased. Except for the wrist joint, the force value of the first quartile was significantly different from those of the other three quartiles. For the wrist joint, the average value for the first quartile showed significant differences with only the third quartile’s average force value.
4. Discussion
The selection of the pivot joint that users utilize for any haptic exploration task in a virtual environment can vary depending on the task itself, the design implementation of the simulation that incorporates that task, and individual preference. Therefore, it is important that we gain insight into how this selection affects the performance of a given task so that both users and designers of such simulations may make informed decisions. We know that our perception of stiffness is influenced by various factors including the existence of tactile and/or proprioceptive feedback, the visual feedback received while an object of interest deforms under applied load, the speed of haptic exploration, and the stiffness difference between the objects. We do not know, however, if the pivot joint used during a task is also one of these influential factors. In that direction, the current study aimed to address the effect of selecting the pivot joint using a stiffness discrimination task. We analyzed the effect of the pivot (or support) joint specifically on stiffness discrimination using three different measures: the Weber fraction, palpation speed, and palpation force by means of a psychophysical experiment. The presented methodology, however, can be applied to tasks other than stiffness discrimination and, therefore, has the potential to be expanded to other aspects of touch.
The Weber fraction has widely been used to quantify an individual’s ability to discriminate differences in various modalities such as perception of weight, temperature, and auditory feedback. We used the Weber fraction in a similar manner; that is, as a quantifiable measure for performance changed as the participants used a different pivot joint in a controlled experiment. The results of the average Weber fraction demonstrated a monotonic decrease as the pivot joint shifted toward the torso, resulting in the smallest average Weber fraction at the shoulder joint. Although these differences in the average Weber fraction between the joints were not significant, they suggested that the users might become more sensitive to stiffness discrimination in a virtual world when more joints of the human arm are involved in the procedure. This, in a sense, can be initially interpreted as the amount of information received in the form of proprioceptive feedback from the joints increases as more joints are involved. The fact that the differences were not significant, however, suggests that the pivot joint, at least during a stiffness discrimination task, eventually does not play a role in an individual’s performance in the stiffness discrimination task.
As for the average palpation speed and force, they were both observed to increase as the pivot joint moved closer to the torso (i.e., a shift from the metacarpophalangeal joint to the shoulder joint) with the exception of the elbow joint. While using the shoulder joint, the participants palpated with the highest speed and force. Combined with the results from the Weber fraction, it can be concluded that using the metacarpophalangeal joint as the pivot seems to be the most advantageous, as incorporating a haptic interface with relatively less force capacity would not affect the individual’s performance.
We also observed that, with the decrease in the stiffness difference between the two palpated surfaces, the average palpation speed and the average palpation force both increased monotonically. These results suggest that the participants used higher force and speed in order to resolve the situations in which the discrimination task became somewhat complicated. This prompts more attention to be paid when predicting the amount of force from the users in a specific haptic exploration task, especially when users are expected to navigate through environments that possess quantifiably similar properties such as stiffness. Additionally, the average palpation speed was found to have no correlation with the average Weber fraction of individual participants for any of the joints, suggesting that the speed at which the surfaces were palpated did not indicate any change in sensitivity for discriminating stiffness differences.
In this study, mainly due to the tedious nature of the employed psychophysical experimentation technique, we examined the effect of arm pivot joints on the stiffness discrimination task by using one single standard stiffness of 1.0 N/mm, which is close to the stiffness of human soft tissue [
19]. Further investigation can be carried out with various standard stiffness values to investigate the repeatability of the observed results of this study. Additionally, we do not utilize only our ability to discriminate stiffness differences while exploring and manipulating haptic environments; therefore, the same procedure described herein can be applied to other touch-relevant tasks such as force direction angle and height discrimination tasks that would help generalize the effect of arm pivot joints as far as the overall experience of haptic manipulation is considered. Finally, the participant population used for testing could be a factor; for instance, simulated haptic experiences for users of a specific profession (dentists, doctors of allopathic or osteopathic medicine, etc.) can be studied for a more complete understanding of the effect of arm pivot joints on different populations.
5. Conclusions
We analyzed the effect of four pivot joints of the arm on stiffness discrimination ability through a comparative analysis of the Weber fraction, palpation speed, and palpation force. From thirty-eight participants, the Weber fraction for four pivot joints (the metacarpophalangeal joint of the index finger, wrist, elbow, and shoulder joints) were 0.14, 0.13, 0.13, and 0.12, respectively. When palpation speed and force were considered, there were certain tendencies across the pivot joints, especially in the form of monotonic increase as the pivot joint approached the torso, but these differences were not significant. In a similar manner, the Weber fractions showed no significant difference across the pivot joints, suggesting that the selection of the pivot joint did not have an effect on the sensitivity to discriminate stiffness differences.
Author Contributions
Conceptualization, E.K.; data curation, K.N.H.; formal analysis, E.K. and K.N.H.; investigation, E.K. and K.N.H.; methodology, E.K.; project administration, E.K.; resources, E.K.; software, E.K.; supervision, E.K.; validation, K.N.H.; writing—original draft preparation, E.K. and K.N.H.; writing—review and editing, E.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
The approval of the IRB at Central Michigan University, Mount Pleasant, MI, was received under protocol number 2020-351.
Informed Consent Statement
Informed consent was obtained from all participants involved in the study.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Williams, R.L., II; Srivastava, M.; Howell, J.N.; Conatser, R.R.; Eland, D.C.; Janet Burns, D.M.; Anthony Chila, D.G. The Virtual Haptic Back for Palpatory Training General Terms: Experimentation, Human Factors. In Proceedings of the 6th international conference on Multimodal interfaces, State College, PA, USA, 14–15 October 2004. [Google Scholar]
- Kim, L.; Park, S.H. Haptic Interaction and Volume Modeling Techniques for Realistic Dental Simulation. Vis. Comput. 2006, 22, 90–98. [Google Scholar] [CrossRef]
- Kosuki, Y.; Okada, Y. 3D Visual Component Based Development System for Medical Training Systems Supporting Haptic Devices and Their Collaborative Environments. In Proceedings of the 2012 Sixth International Conference on Complex, Intelligent, and Software Intensive Systems, Palermo, Italy, 4–6 July 2012; pp. 687–692. [Google Scholar]
- Rodríguez, J.L.; Velázquez, R.; Del-Valle-soto, C.; Gutiérrez, S.; Varona, J.; Enríquez-Zarate, J. Active and Passive Haptic Perception of Shape: Passive Haptics Can Support Navigation. Electronics 2019, 8, 355. [Google Scholar] [CrossRef] [Green Version]
- Tan, H.Z.; Durlach, N.I.; Beauregard, G.L.; Srinivasan, M.A. Manual Discrimination of Compliance Using Active Pinch Grasp: The Roles of Force and Work Cues. Percept. Psychophys. 1995, 57, 495–510. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lécuyer, A.; Coquillart, S.; Kheddar, A.; Richard, P.; Coiffet, P. Pseudo-Haptic Feedback: Can Isometric Input Devices Simulate Force Feedback? In Proceedings of the IEEE Virtual Reality 2000 (Cat. No. 00CB37048), New Brunswick, NJ, USA, 18–22 March 2000; pp. 83–90. [Google Scholar]
- Genecov, A.M.; Stanley, A.A.; Okamura, A.M. Perception of a Haptic Jamming Display: Just Noticeable Differences in Stiffness and Geometry. In Proceedings of the 2014 IEEE Haptics Symposium (HAPTICS), Houston, TX, USA, 20 March 2014; pp. 333–338. [Google Scholar]
- Allin, S.; Matsuoka, Y.; Klatzky, R. Measuring Just Noticeable Differences for Haptic Force Feedback: Implications for Rehabilitation. In Proceedings of the 10th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, HAPTICS 2002, Orlando, FL, USA, 24–25 March 2002; pp. 299–302. [Google Scholar]
- Fu, W.; Landman, A.; van Paassen, M.M.; Mulder, M. Modeling Human Difference Threshold in Perceiving Mechanical Properties from Force. IEEE Trans. Hum. Mach. Syst. 2018, 48, 359–368. [Google Scholar] [CrossRef]
- Laming, D. Sensory Analysis; Academic Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Norwich, K.H. On the Theory of Weber Fractions. Percept. Psychophys. 1987, 42, 286–298. [Google Scholar] [CrossRef] [PubMed]
- Maereg, A.T.; Nagar, A.; Reid, D.; Secco, E.L. Wearable Vibrotactile Haptic Device for Stiffness Discrimination during Virtual Interactions. Front. Robot. AI 2017, 4, 42. [Google Scholar] [CrossRef]
- De Gersem, G. Kinaesthetic Feedback and Enhanced Sensitivity in Robotic Endoscopic Telesurgery. Cathol. Univ. Leuven 2005, 7. Available online: https://www.semanticscholar.org/paper/Kinaesthetic-Feedback-and-Enhanced-Sensitivity-in-Gersem/215b0d3f18d0b530ff66a4634bab7c44c7061d08 (accessed on 30 September 2022).
- Son, B.; Park, J. Haptic Feedback to the Palm and Fingers for Improved Tactile Perception of Large Objects. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology, Berlin, Germany, 14–17 October 2018; pp. 757–763. [Google Scholar]
- Karadogan, E.; Williams, R.L., II; Howell, J.N.; Conatser, R.R. A Stiffness Discrimination Experiment Including Analysis of Palpation Forces and Velocities. Simul. Healthc. 2010, 5, 279–288. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leek, M.R. Adaptive Procedures in Psychophysical Research. Percept. Psychophys. 2001, 63, 1279–1292. [Google Scholar] [CrossRef] [Green Version]
- Walker, L.; Tan, H.Z. A Perceptual Study on Haptic Rendering of Surface Topography When Both Surface Height and Stiffness Vary. In Proceedings of the 12th International Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, HAPTICS’04, Chicago, IL, USA, 27–28 March 2004; pp. 138–145. [Google Scholar]
- Gescheider, G.A. Psychophysics: The Fundamentals; Psychology Press: London, UK, 2013; ISBN 113480122X. [Google Scholar]
- Oh, D.; Lee, S.; Choi, Y. Simultaneous Stiffness Measurement Device for a Human Forearm. IEEE Access 2020, 8, 15313–15321. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}