









Sharing the Sidewalk: Observing Delivery Robot Interactions with Pedestrians during a Pilot in Pittsburgh, PA


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
2.1. Trade-Offs of Shifting Freight Road Traffic to Sidewalks
2.2. Prior Observations of PDDs in Public Spaces
2.2.1. Wizard of Oz Studies
2.2.2. Observational Studies of PDDs
2.3. Human–Robot Communication in Public
2.4. Key Takeaways from Prior Work
3. The Pilot
4. Method
5. Results
5.1. Public Knowledge & Folklore
Sitting at the bus stop are three older women, all smoking cigarettes. I (First Author) sat with them. The woman sitting in the middle notices the robot first; she takes her cigarette down by her side, sits up straighter, and leans forward toward the device. She points it out to me and the other two women. The woman says, “Did you know it carries pizza?”, then follows with “That seems like an expensive way to deliver pizza.” The second woman responds, “Whom does it belong to?” Who owns it?” The first woman says back, “I see it in my neighborhood all the time.” The third woman says, “They should be careful with what neighborhood they send it to, not everyone will be kind to it.” The second woman replies, “Will it be here for the long haul?”(Observation, 3 November 2021).
The painter closest to the house leans towards the sidewalk and says, “I’ll give you $30 to go pee on it.” The other painter on the sidewalk laughed and moved his head to follow the robot as it passed by. “I think they all have cameras on them. They’re watching us, and they’ll know if we touch it,” he said. The painter in the house responds, “I heard they deliver mail from the post office. So dumb.” (Observation, 8 November 2021).
Construction worker 1 says, “Is this supposed to be delivering something?” Construction worker 2, responds, “I’ve seen it come up and down this street all day, and it hasn’t made a single delivery.” Construction worker 1, while still watching the device, “Is someone controlling that?” Construction worker 3 adds, “How many of these are there?” Construction worker 4, while taking a photo says, “It looks so fucking stupid.”(Observation, 3 November 2021).
5.2. Distractions and Obstructions
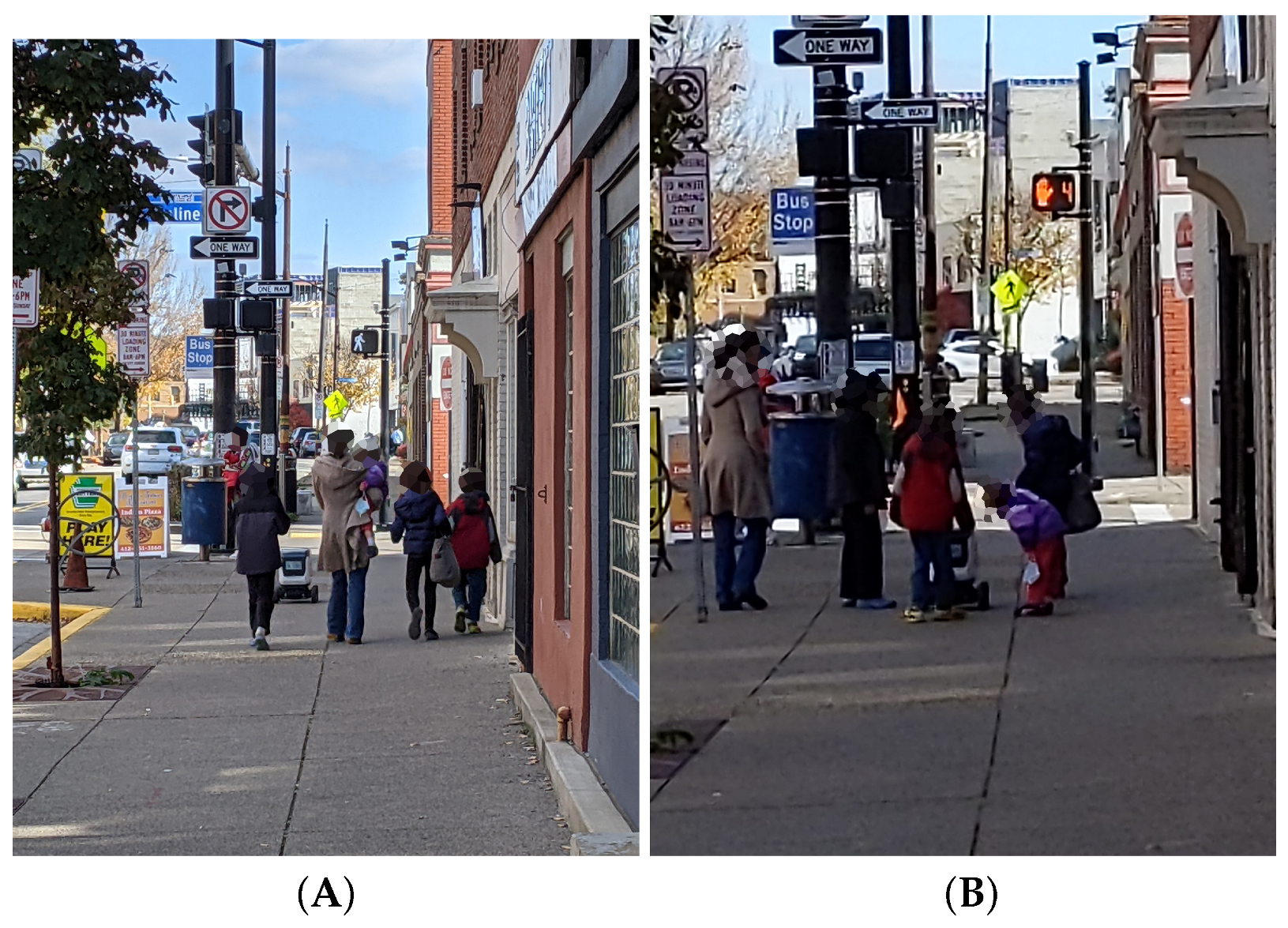
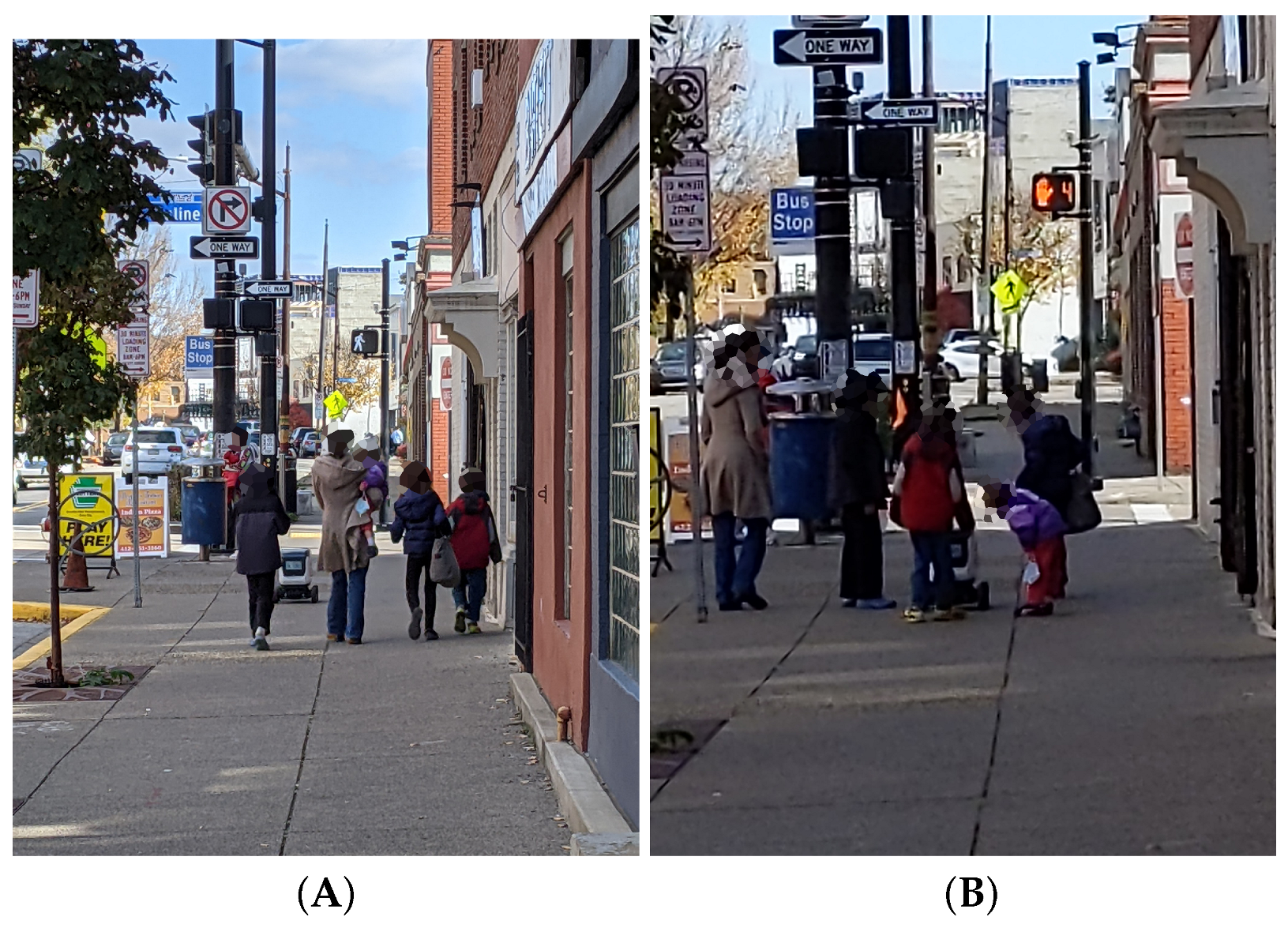
A mother and four children approached the bot as it headed toward them. The mother was carrying one child, two were on her left and one on her right side. They slowed down as the bot approached them, and then it stopped when they were about 1–2 feet from the family. The mother placed the child she was carrying on the ground, and all 5 of them circled around the bot, hinging at the waist to see more closely. The smallest child asked, “Why did it stop?!” One of the children reached out to touch it, and the mother said, “Don’t touch it, it’s not ours.” She ushered the kids to continue walking forward, but they did not move. Their eyes and mouths were all open wide and they continued to lean toward the PDD. After about another minute, the mom told them to keep walking, and they did. After walking a few more feet, the smallest child stopped and turned around, looking back at the bot as it rolled on. (Observation, 5 November 2021).
A man and two young boys walk by the PDD, which has been backed up against a wall. The two boys skip over to it, calling to their dad to notice it. The boys stand directly against the bot, which has stopped moving. One boy says “I think it’s stuck.” Both boys begin to push the PDD but fail to move it easily. The other child says, “I think it’s dead.” They push and pull the PDD until it’s moved about 2 feet. One of the boys sees another PDD moving toward them and runs over to it. The other boy follows, and as they both get close, the bot stops moving. They stand right in front of it, looking directly at the device’s face, and press their hands against it. The boys begin talking to the bot, saying, “Hello Robot. Can you hear me? Can you see me?” The father is standing about 4 feet away, watching his sons and looking around the sidewalk. After a minute or two a Kiwibot employee comes over and talks to the family, ending the interaction. (Observation, 9 December 2021).
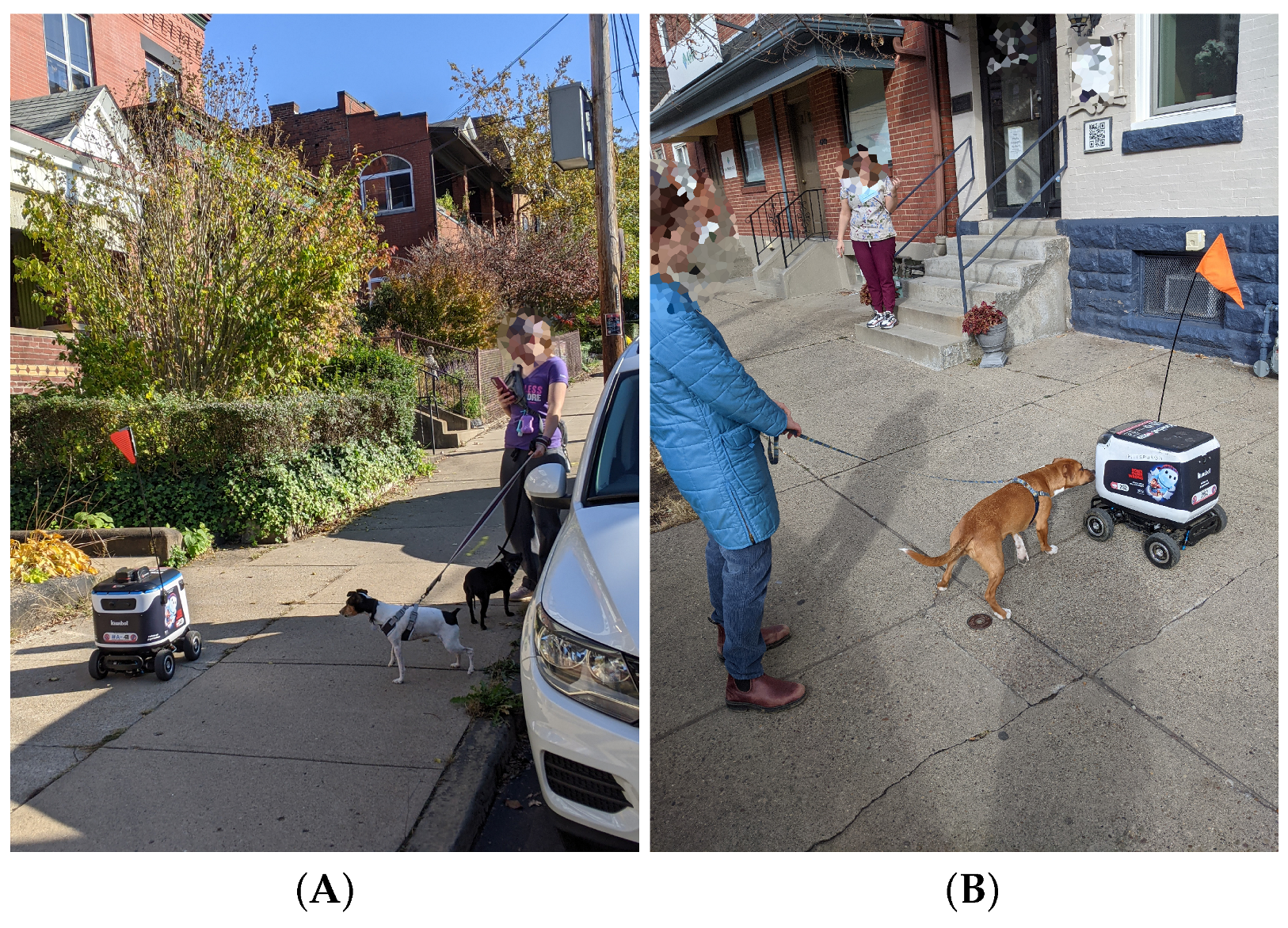
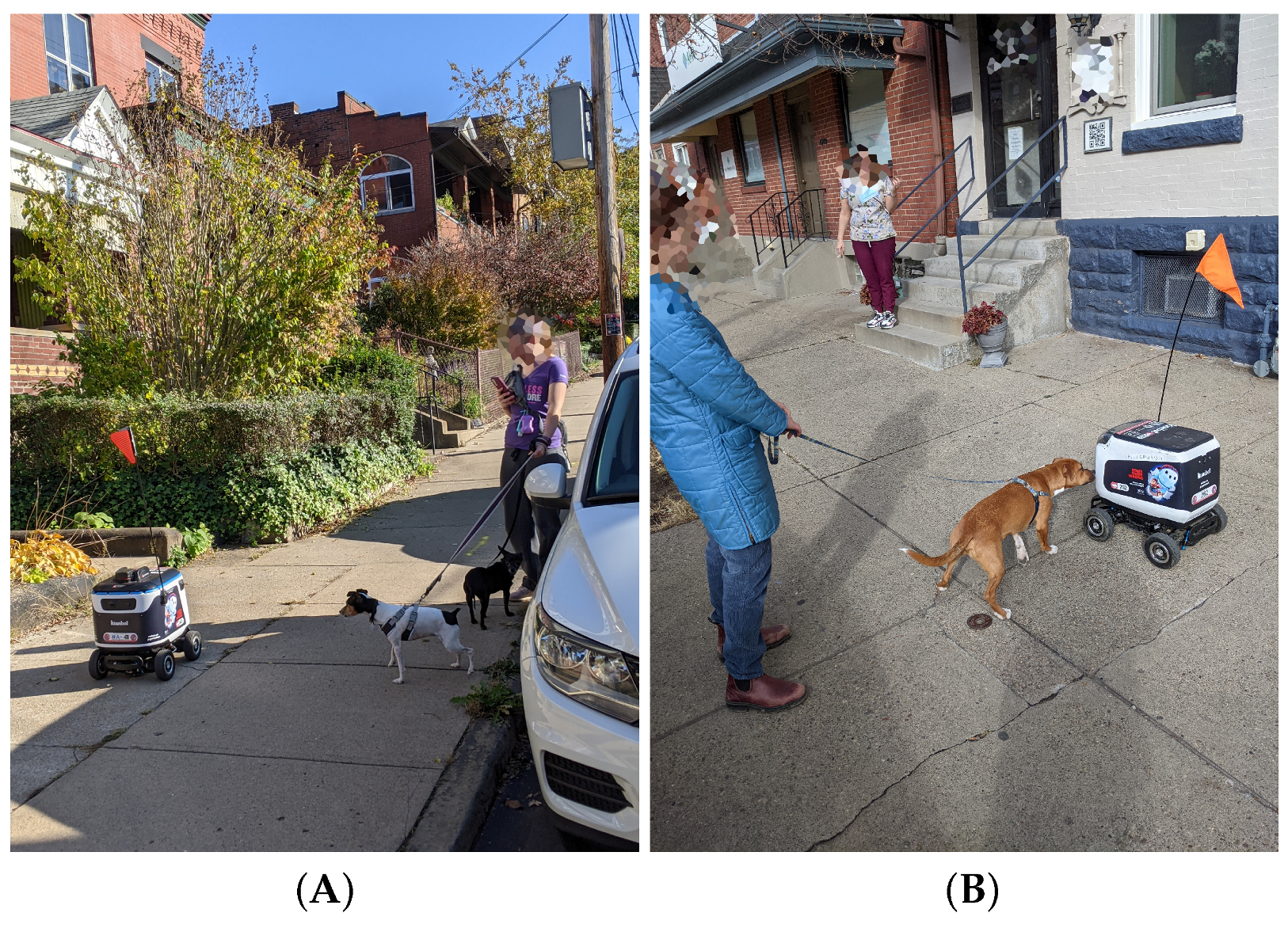
A woman is walking two small dogs on the sidewalk, both in front of her. She stops about 5 feet away from a moving robot to take a picture, and as she steps closer, both of the dogs begin to bark. She pulls the leashes back towards her, but the dogs jump forward, continuing to bark. When she begins to move again, she holds the leash tighter against her, pulling the dogs close. She moves onto the street to give space between the PDD and her dogs. As she does this, a cyclist on the street swerves around her. Additionally, two pedestrians who had been walking behind the woman slowed their pace as she negotiated where to walk. The woman turns to me and exclaims, “I’m so curious what it’s delivering!” (Observation, 10 November 2021).A woman walking a brown dog stops at the corner of the street and watches as a robot crosses from the other end. The dog begins barking non-stop, prompting the woman to say, “I know girl, I see it too.” As the bot moves past them, the dog moves towards it and continues to bark. Another pedestrian walking behind the woman slows her pace as she sees the dog barking. She seems to notice the dog first and quickly moves to the inside of the sidewalk so as to not hit the woman and dog. The first woman stands still, moving her head to look at the robot as it passes her. (Observation, 1 December 2021).
A woman and her golden retriever puppy walk towards the robot, with the puppy in front of the woman. When they are about 3–4 feet from the robot, the dog begins to slow down and then steps back towards the woman. It shrinks its body between her legs and lowers its head. The woman leans over the dog and says, “It’s OK, don’t be scared.” She walks in front of the dog, and tugs at its leash multiple times before it begins to follow her. She sighs and yanks the leash and the dog begins to move, taking wide, rounded steps to keep distance from the robot. (Observation, 8 December 2021).
5.3. Need for Human Assistance
The PDDs front wheel fell into a road verge and became stuck. A woman who was walking in the same direction stopped moving when she was parallel to the device. She slowly approached the device, crouching a bit as she side-stepped to it. When she was inches away, she stopped moving, looked directly down at the device, and put both hands on her hip. Her lips were pursued, and she had one eyebrow raised. She bent down, put her face right next to the PDD, and frowned. She tilted her head to look at the front wheels, then back at the device, then back to the wheels. After a minute, she put both hands on both sides of the PDD and spoke to it softly. She lifted it out of the crack, patted it on the top, and kept walking. As she walked, she teetered side to side and smiled to herself (Observation, 3 November 2021).
A vacuum tube was set up from a retail store to a company van, spanning the width of the sidewalk. When the robot was 1 foot away from the tube, it stopped, paused for a moment, turned around, and rolled in the opposite direction. It repeated this sequence, unable to move past the tube. I stood on the street corner, facing away from the device. A woman stood next to me, waiting for the light to change. Her head is turned, facing the device. She looked toward the direction the device had come from and nodded her head to the vacuum tube and said “I think it’s stuck. I was shopping there, and I kept seeing it from the window. I don’t think it can get through.” She looked at me and laughed, and then said, “I bet someone is missing their delivery.” (Observation, 5 November 2021).
The PDD falls into a grate off the sidewalk, caught between the pavement and the dirt. The device begins to emit a loud siren sound, and the text on the face reads “HELP ME.” A woman, passing by while talking on her phone, walks directly over to the PDD. She cautiously leans over to read the screen. Speaking into her phone, she says, “It fell on the sidewalk. I think it’s a delivery robot.” She uses her foot to move the device out of the grate and laughs. When the device was fully on the sidewalk, the screen changed to display, “THANK YOU.” She then says into the phone, “Hold on, I have to take a picture of this. It’s so sweet.” and proceeds to photograph the robot before walking forward. (Observation, 30 November 2021).
A PDD is about 5 feet from the tube and a construction worker notices the device approaching. He stops in the middle of the sidewalk to watch the device roll toward him. When the PDD is about 1–2 feet from the tube, the man looks down at the tube and then lifts it, allowing the PDD to roll underneath it. As the PDD rolls by, the man’s head turns with it, to watch it pass through. His lips turn upwards into a small smile, and he nods to the device after it has fully passed. He puts the tube down and continues to watch the device until it is about 4–5 feet away, and then he turns his attention back to his work. (Observation, 5 November 2021).
5.4. Accessibility Considerations and Issues
On her overall sentiment: “I like those little robot things...I think they’re cool looking, I like their little face on the front.”On a scale of 1–5, 1 being ‘dangerous’ and 5 being ‘very safe’: “I’d say a 5. They stop if something is in their way, they won’t move again until the other thing has moved. Before it even comes in contact, before it even gets to you, it will stop until you move and then it will keep going.” (Interview, 17 November 2021).
6. Discussion
6.1. Public Communication about Public PDD Pilots
6.2. Managing Appropriate Navigation
6.3. Inviting Interaction
6.4. Dissuading Interaction
6.5. Limitations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PDD | Personal delivery device |
| DOMI | Department of Mobility and Infrastructure |
Appendix A. Field Observations Guide
- Interaction dynamics of the robots as they navigate and as they interact with people.
- How is the robot moving?
- How is the robot performing?
- Is the robot able to move around people that step in its way?
- Does the robot navigate obstacles on the sidewalk (i.e., light poles, bikes, or scooters)?
- Note down the following movement attributes:
- Speed
- Direction
- Location on sidewalk
- Stops and starts
- Obstacles encountered
- If a Kiwibot staff member comes up to the robot:
- What does the staff member appear to do with the robot?
- How long is the staff member there with the robot?
- When the robot interacts with someone:
- Does the robot move around them?
- Does the robot stop for them and give them the right of way?
- Does the robot not move out of the way and the person needs to change their path?
- Does the robot signal to them in any way?
- When a person approaches the robot, do they:
- Change their direction or location on the sidewalk?
- Stop and give the right of way to the robot?
- Try to interact with the robot through voice, gesture, or movement?
- Test/mess with the robot in any way?
- Actively vandalize or harm the robot?
- Information on people interacting with robot:
- Age appearance [child, young adult, middle age, elderly]
- Use of assistive device? [cane, walker, crutches, powered wheelchair, manual wheelchair, mobility scooter, etc.]
- Try watching for any interaction with the robots by bystanders, not in the direct path of the robot.
- Do people stare at the robot for an extended time?
- Do people seem to not acknowledge the robot or do they not seem to notice?
Appendix B. Intercept Interview Questions
- Age (open-ended response, prefer not to answer)
- Gender (open-ended response, prefer not to answer)
- Education (primary school, high school, college, postgraduate school, prefer not to answer)
- Income (You can tell us a range (Under 50 K, 50–100 K, 100–150 K, 150–200 K, etc), prefer not to answer)
- Race/Ethnicity (open-ended, prefer not to answer)
- Employment (Yes/no and what industry, or retired—open-ended, prefer not to answer)
| On a scale of 1 to 5. What is your overall impression of sidewalk delivery robots? | ||||
| 1 (I hate them) | 2 | 3 | 4 | 5 (I love them) |
| Sidewalk robots are competent | ||||
| 1 (strongly disagree) | 2 | 3 | 4 | 5 (strongly agree) |
| Sidewalk robots are dangerous | ||||
| 1 (strongly disagree) | 2 | 3 | 4 | 5 (strongly agree) |
| Sidewalk robots are sociable | ||||
| 1 (strongly disagree) | 2 | 3 | 4 | 5 (strongly agree) |
| Sidewalk robots are responsive | ||||
| 1 (strongly disagree) | 2 | 3 | 4 | 5 (strongly agree) |
| Sidewalk robots are aggressive | ||||
| 1 (strongly disagree | 2 | 3 | 4 | 5 (strongly agree) |
| Sidewalk robots are important to me | ||||
| 1 (strongly disagree) | 2 | 3 | 4 | 5 (strongly agree) |
| Sidewalk robots are important for society | ||||
| 1 (strongly disagree) | 2 | 3 | 4 | 5 (strongly agree) |
| Sidewalk robots are trustworthy | ||||
| 1 (strongly disagree) | 2 | 3 | 4 | 5 (strongly agree) |
- Can you describe what it was like to go by the sidewalk robot?
- Did you feel like the robot affected your movement on the sidewalk?
- Can you describe how you felt the robot navigated the sidewalk?
- Have you ever seen a sidewalk robot?
- Can you describe what it was like to go by the sidewalk robot?
- Can you describe how you felt it navigated the sidewalk?
- Do you think sidewalk robots are safe? Why or why not?
- Did you feel obstructed by the sidewalk robot?
- Have you heard much about sidewalk robots? If so, what sources did you learn information from?
- Have you heard about this deployment of Kiwibots in Bloomfield?
- Do you have any concerns about the sidewalk robots?
- Have you encountered a sidewalk robot at a street crossing? As a pedestrian, as a cyclist, or as a driver?
- If a sidewalk robot has a problem, how could it let a pedestrian, cyclist, or driver know a problem is occurring? (After they answer, also suggest: Lights? Sounds?Wireless messages to your phone, etc?)
- Do you have any ideas for things that would make the sidewalk robot better for you as a pedestrian?
- Do you have any other ideas about how these sidewalk robots could be used?
- Would you consider receiving a delivery from a sidewalk robot?
- What do you know about how a sidewalk robot works?
- Is there anything else you would like to tell us?
References
- Hossain, M. Self-Driving Robots: A Revolution in the Local Delivery. California Management Review. 2022. Available online: https://cmr.berkeley.edu/assets/documents/pdf/2022-04-self-driving-robots-a-revolution-in-the-local-delivery.pdf (accessed on 13 May 2023).
- Hoffmann, T.; Prause, G. On the regulatory framework for last-mile delivery robots. Machines 2018, 6, 33. [Google Scholar] [CrossRef]
- McQueen, M.; Abou-Zeid, G.; MacArthur, J.; Clifton, K. Transportation transformation: Is micromobility making a macro impact on sustainability? J. Plan. Lit. 2021, 36, 46–61. [Google Scholar] [CrossRef]
- Gehrke, S.; Phair, C.; Russo, B.; Smaglik, E. Observed sidewalk autonomous delivery robot interactions with pedestrians and bicyclists. Transp. Res. Interdiscip. Perspect. 2023, 100789, 1–11. [Google Scholar] [CrossRef]
- Pani, A.; Mishra, S.; Golias, M.; Figliozzi, M. Evaluating public acceptance of autonomous delivery robots during COVID-19 pandemic. Transp. Res. Part D Transp. Environ. 2020, 89, 102600. [Google Scholar] [CrossRef]
- City of Pittsburgh. City Partners with Kiwibot to Pilot Free Delivery of Food, Medicine and Books by Delivery Robot. 2021. Available online: https://pittsburghpa.gov/press-releases/press-releases/5294 (accessed on 13 May 2023).
- Nardi, B.A. The use of ethnographic methods in design and evaluation. In Handbook of Human-Computer Interaction; Elsevier Science: Amsterdam, The Netherlands, 1997; pp. 361–366. [Google Scholar]
- Dourish, P. Reading and interpreting ethnography. In Ways of Knowing in HCI; Springer: New York, NY, USA, 2014; pp. 1–23. [Google Scholar]
- Marks, M. Robots in space: Sharing our world with autonomous delivery vehicles. SSRN Electron. J. 2019. Available online: https://ssrn.com/abstract=3347466 (accessed on 13 May 2023). [CrossRef]
- Deng, P.; Amirjamshidi, G.; Roorda, M. A vehicle routing problem with movement synchronization of drones, sidewalk robots, or foot-walkers. Transp. Res. Procedia 2020, 46, 29–36. [Google Scholar] [CrossRef]
- Schröder, J.; Heid, B.; Neuhaus, F.; Kässer, M.; Klink, C.; Tatomir, S. Fast Forwarding Last-Mile Delivery: Implications for the Ecosystem; McKinsey: New York, NY, USA, 2018. [Google Scholar]
- Jennings, D.; Figliozzi, M. Study of sidewalk autonomous delivery robots and their potential impacts on freight efficiency and travel. Transp. Res. Rec. 2019, 2673, 317–326. [Google Scholar] [CrossRef]
- Rai, H.B.; Touami, S.; Dablanc, L. Autonomous e-commerce delivery in ordinary and exceptional circumstances. The French case. Res. Transp. Bus. Manag. 2022, 45, 100774. [Google Scholar]
- Wong, J.C. Delivery robots: A revolutionary step or sidewalk-clogging nightmare? The Guardian, 12 April 2017. [Google Scholar]
- Salvini, P.; Paez-Granados, D.; Billard, A. On the Safety of Mobile Robots Serving in Public Spaces: Identifying Gaps in EN ISO 13482:2014 and Calling for a New Standard. J. Hum.-Robot Interact. 2021, 10, 1–27. [Google Scholar] [CrossRef]
- Thomasen, K. Robots, Regulation, and the changing nature of public space. Ott. Law Rev. 2020, 51. Available online: https://ssrn.com/abstract=3589896 (accessed on 13 May 2023).
- Bennett, C.; Ackerman, E.; Fan, B.; Bigham, J.; Carrington, P.; Fox, S. Accessibility and The Crowded Sidewalk: Micromobility’s Impact on Public Space. In Proceedings of the Designing Interactive Systems Conference 2021, Virtual, 28 June–2 July 2021; pp. 365–380. [Google Scholar]
- Abrams, A.; Platte, L.; Rosenthal-von der Putten, A. Field observation: Interactions between pedestrians and a delivery robot. In Proceedings of the IEEE International Conference on Robot & Human Interactive Communication (ROMAN’20), Virtual, 31 August–4 September 2020. [Google Scholar]
- Vroon, J.; Rusák, Z.; Kortuem, G. Context-confrontation: Elicitation and exploration of conflicts for delivery robots on sidewalks. In Proceedings of the First International Workshop on Designerly HRI Knowledge: Held in Conjunction with the 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN 2020), Virtual, 31 August–4 September 2020. [Google Scholar]
- Van Mierlo, S. Field Observations of Reactions of Incidentally Copresent Pedestrians to a Seemingly Autonomous Sidewalk Delivery Vehicle: An Exploratory Study. 2021. Available online: https://mwlc.global/wp-content/uploads/2021/08/Thesis_Shianne_van_Mierlo_6206557.pdf (accessed on 13 May 2023).
- Kruse, T.; Pandey, A.K.; Alami, R.; Kirsch, A. Human-aware robot navigation: A survey. Robot. Auton. Syst. 2013, 61, 1726–1743. [Google Scholar] [CrossRef]
- Biswas, A.; Wang, A.; Silvera, G.; Steinfeld, A.; Admoni, H. SocNavBench: A Grounded Simulation Testing Framework for Evaluating Social Navigation. J. Hum.-Robot Interact. 2022, 11, 1–24. [Google Scholar] [CrossRef]
- Karnan, H.; Nair, A.; Xiao, X.; Warnell, G.; Pirk, S.; Toshev, A.; Hart, J.; Biswas, J.; Stone, P. Socially compliant navigation dataset (scand): A large-scale dataset of demonstrations for social navigation. IEEE Robot. Autom. Lett. 2022, 7, 11807–11814. [Google Scholar] [CrossRef]
- Mavrogiannis, C.; Alves-Oliveira, P.; Thomason, W.; Knepper, R.A. Social Momentum: Design and Evaluation of a Framework for Socially Competent Robot Navigation. J. Hum.-Robot Interact. 2022, 11, 1–37. [Google Scholar] [CrossRef]
- Vroon, J.; Zhou, Y.; Rusak, Z. Detecting Emerging Challenges in Social Sidewalk Navigation. In Proceedings of the Urban AI: Formulating an Agenda for the Interdisciplinary Research of Artificial Intelligence in Cities, Eindhoven, The Netherlands, 8 June 2020. [Google Scholar]
- Dobrosovestnova, A.; Schwaninger, I.; Weiss, A. With a Little Help of Humans. An Exploratory Study of Delivery Robots Stuck in Snow. In Proceedings of the 2022 31st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Napoli, Italy, 29 August–2 September 2022; pp. 1023–1029. [Google Scholar]
- Backhaus, N.; Rosen, P.H.; Scheidig, A.; Gross, H.M.; Wischniewski, S. “Somebody help me, please?!” interaction design framework for needy mobile service robots. In Proceedings of the 2018 IEEE workshop on advanced robotics and its social impacts (ARSO), Genova, Italy, 27–29 September 2018; pp. 54–61. [Google Scholar]
- Holm, D.G.; Junge, R.P.; Østergaard, M.; Bodenhagen, L.; Palinko, O. What Will It Take to Help a Stuck Robot? Exploring Signaling Methods for a Mobile Robot. In Proceedings of the 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Sapporo, Japan, 7–10 March 2022; pp. 797–801. [Google Scholar]
- Angelopoulos, G.; Rossi, A.; Di Napoli, C.; Rossi, S. You Are In My Way: Non-verbal Social Cues for Legible Robot Navigation Behaviors. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 657–662. [Google Scholar]
- Fernandez, R.; John, N.; Kirmani, S.; Hart, J.; Sinapov, J.; Stone, P. Passive demonstrations of light-based robot signals for improved human interpretability. In Proceedings of the 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018; pp. 234–239. [Google Scholar]
- Hart, J.; Mirsky, R.; Xiao, X.; Tejeda, S.; Mahajan, B.; Goo, J.; Baldauf, K.; Owen, S.; Stone, P. Using human-inspired signals to disambiguate navigational intentions. In Proceedings of the Social Robotics: 12th International Conference, ICSR 2020, Golden, CO, USA, 14–18 November 2020; Springer: Cham, Switzerland, 2020; pp. 320–331. [Google Scholar]
- Reinhardt, J.; Prasch, L.; Bengler, K. Back-off: Evaluation of robot motion strategies to facilitate human-robot spatial interaction. ACM Trans. Hum.-Robot Interact. 2021, 10, 1–25. [Google Scholar] [CrossRef]
- Senft, E.; Satake, S.; Kanda, T. Would you mind me if i pass by you? socially-appropriate behaviour for an omni-based social robot in narrow environment. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 539–547. [Google Scholar]
- Kannan, S.S.; Lee, A.; Min, B.C. External human-machine interface on delivery robots: Expression of navigation intent of the robot. In Proceedings of the 2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Vancouver, BC, Canada, 8–12 August 2021; pp. 1305–1312. [Google Scholar]
- Shrestha, M.C.; Kobayashi, A.; Onishi, T.; Uno, E.; Yanagawa, H.; Yokoyama, Y.; Kamezaki, M.; Schmitz, A.; Sugano, S. Intent communication in navigation through the use of light and screen indicators. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 523–524. [Google Scholar]
- Shrestha, M.C.; Onishi, T.; Kobayashi, A.; Kamezaki, M.; Sugano, S. Communicating directional intent in robot navigation using projection indicators. In Proceedings of the 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018; pp. 746–751. [Google Scholar]
- Matsumaru, T.; Kusada, T.; Iwase, K. Mobile robot with preliminary-announcement function of forthcoming motion using light-ray. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–13 October 2006; pp. 1516–1523. [Google Scholar]
- Coovert, M.D.; Lee, T.; Shindev, I.; Sun, Y. Spatial augmented reality as a method for a mobile robot to communicate intended movement. Comput. Hum. Behav. 2014, 34, 241–248. [Google Scholar] [CrossRef]
- Hetherington, N.J.; Croft, E.A.; Van der Loos, H.M. Hey robot, which way are you going? nonverbal motion legibility cues for human-robot spatial interaction. IEEE Robot. Autom. Lett. 2021, 6, 5010–5015. [Google Scholar] [CrossRef]
- Lupetti, M.L.; Bendor, R.; Giaccardi, E. Robot citizenship: A design perspective. In Proceedings of the Design and Semantics of Form and Movement: Desform 2019, Cambridge, MA, USA, 9 October 2019; pp. 87–95. [Google Scholar]
- Emerson, R.M.; Fretz, R.I.; Shaw, L.L. Writing Ethnographic Fieldnotes; University of Chicago Press: Chicago, IL, USA, 2011. [Google Scholar]
- Reig, S.; Norman, S.; Morales, C.G.; Das, S.; Steinfeld, A.; Forlizzi, J. A field study of pedestrians and autonomous vehicles. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Toronto, ON, Canada, 23–25 September 2018; pp. 198–209. [Google Scholar]
- Weick, K. Sensemaking in Organizations; Sage: Thousand Oaks, CA, USA, 1995. [Google Scholar]
- Siino, R.; Hinds, P. Robots, Gender & Sensemaking: Sex Segregation’s Impact On Workers Making Sense Of a Mobile Autonomous Robot. In Proceedings of the 2005 IEEE International Conference On Robotics And Automation, Barcelona, Spain, 18–22 April 2005; pp. 2773–2778. [Google Scholar]
- Yang, S.; Mok, B.; Sirkin, D.; Ive, H.; Maheshwari, R.; Fischer, K.; Ju, W. Experiences developing socially acceptable interactions for a robotic trash barrel. In Proceedings of the 2015 24th IEEE International Symposium on Robot And Human Interactive Communication (RO-MAN), Kobe, Japan, 31 August–4 September 2015; pp. 277–284. [Google Scholar]
- Reeves, B.; Nass, C. The media equation: How people treat computers, television, and new media like real people. Cambridge UK 1996, 10, 236605. [Google Scholar]
- Brščić, D.; Kidokoro, H.; Suehiro, Y.; Kanda, T. Escaping from Children’s Abuse of Social Robots. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2005; Association for Computing Machinery: New York, NY, USA, 2015. HRI ’15. pp. 59–66. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weinberg, D.; Dwyer, H.; Fox, S.E.; Martelaro, N. Sharing the Sidewalk: Observing Delivery Robot Interactions with Pedestrians during a Pilot in Pittsburgh, PA. Multimodal Technol. Interact. 2023, 7, 53. https://doi.org/10.3390/mti7050053
Weinberg D, Dwyer H, Fox SE, Martelaro N. Sharing the Sidewalk: Observing Delivery Robot Interactions with Pedestrians during a Pilot in Pittsburgh, PA. Multimodal Technologies and Interaction. 2023; 7(5):53. https://doi.org/10.3390/mti7050053
Chicago/Turabian StyleWeinberg, David, Healy Dwyer, Sarah E. Fox, and Nikolas Martelaro. 2023. "Sharing the Sidewalk: Observing Delivery Robot Interactions with Pedestrians during a Pilot in Pittsburgh, PA" Multimodal Technologies and Interaction 7, no. 5: 53. https://doi.org/10.3390/mti7050053
APA StyleWeinberg, D., Dwyer, H., Fox, S. E., & Martelaro, N. (2023). Sharing the Sidewalk: Observing Delivery Robot Interactions with Pedestrians during a Pilot in Pittsburgh, PA. Multimodal Technologies and Interaction, 7(5), 53. https://doi.org/10.3390/mti7050053