
Indoor Localization for Personalized Ambient Assisted Living of Multiple Users in Multi-Floor Smart Environments


Abstract
:1. Introduction
- Most of the advancement in AAL research has focused on the development of technologies based on what is feasible [14] and by keeping an average user or in other words an ‘one size fits all’ approach in mind [15,16]. Researchers have defined an average user in terms of specific patterns of user interactions and specific cognitive, behavioral, perceptual, emotional, and mental abilities, which are quite often different from the actual user, who might present different needs and varying abilities based on their diversity. Recent research [17] shows that such approaches are no longer effective as specific users present specific needs [18,19].
- The attempts [16] to customize such applications for specific needs of the actual user have focused on manual redesign of the systems based on the individual needs, training the actual user to interact like the average user based on whom the system was initially designed, and supplying the user with a different or additional gadget or tool to help them with the interactions. Such customization initiatives are complicated to develop, expensive, involve a significant amount of time to implement, and are not practically feasible in most cases. Moreover, the elderly, being naturally receptive to new technologies [20], quite often refuse to use a different or additional gadget or tool for their daily interactions.
- The differences in the anticipated user interactions by these AAL systems based on the model of an average user and the actual interactions by the users based on their specific needs creates a ‘gap’ in terms of the effectiveness of these systems to respond to these varying needs. This creates perceptions of complexity, fear, anxiety, lack of trust in technology, and confusion in the mind of the actual user, who ultimately refuses to use the given AAL system or tool [16,21,22].
- The AAL technologies developed by keeping an average user in mind have not considered the dynamic changes in specific needs of actual users that could be demonstrated on a temporary basis, such as from an injury [16].
- Smart Homes of the future would involve multiple users, including the elderly, interacting, and living with each other [23,24]. These users are expected to be diverse in multiple ways [25]. User diversity presents a challenge in terms of multi-user activity analysis or for analyzing any associated needs of the users in their living environments [26].
2. Literature Review
- The works in AAL [54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69] that involved recruiting participants to evaluate the efficacy of the proposed approaches were developed by keeping an average user in mind [16], where the average user was defined to have a certain set of user interaction patterns in terms of specific cognitive, behavioral, perceptual, and mental abilities, which in a real-world scenario can be different from the characteristics, needs, and abilities of the actual user in the AAL environment.
- The works [33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48] that used different forms of machine learning and artificial intelligence approaches to detect the indoor location of a user have used the major machine learning approaches and did not focus on using any form of boosting approaches to improve the performance accuracy of the underlining systems. To improve the trust and seamless acceptance of such AAL technologies as well as to contribute towards improved quality of life and enhanced user experience of the elderly, it is crucial to improve the performance accuracies of such systems.
- The approaches [54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69] for indoor localization, which were evaluated by including multiple participants or users in the experimental trials, did not have a significant number of participants to represent the diversity of actual users [25]. It is important to include more participants in such experimental trials so that the machine learning-based systems can get familiar with the diversified range of user interactions from different users in the real world.
- The indoor localization frameworks [49,50,51,52,53] that focused on detecting the X and Y coordinates of the user’s indoor position did not focus on providing semantic context to these detections. Here, semantic context refers to providing additional meaning and details in terms of building, floor, and dynamic spatial context information (such as inside or outside a given indoor spatial region) to such indoor location detections, for better understanding and interpretation of the indoor locations of the user in real world scenarios; where the users could be living in a multi-storied building, so that the same may be interpreted and analyzed for immediate care and attention in case of any healthcare-related needs. While a few recent works [74,75,76,77,78,79,80] have investigated approaches for floor detection in indoor localization, the performance accuracies of such systems are not high enough to support their widescale deployment and real time implementations.
3. Proposed Work
4. Results and Discussion
- In terms of Overall Accuracy of detecting the different floors: P(User 2) = P(User 3) = P(User 4) = P(User 5) = P(User 6) = P(User 8) = P(User 10) = P(User 12) = P(User 13) = P(User 15) = P(User 17) = P(User 18) > P(User 9) > P(User 14) > P(User 7) > P(User 16) > P(User 1) > P(User 11) > P(Average User).
- In terms of the Class Precision for detection of the users’ location’s on Floor 0: P(User 8) = P(User 10) = P(User 13) = P(User 17) > P(User 9) > P(User 1) > P(User 16) > P(User 14) > P(User 7) > P(User 11) > P(Average User). Here, the performance characteristics of User 2, User 3, User 4, User 5, User 6, User 12, User 15, and User 18 were not included in the analysis as those users were never present on Floor 0.
- In terms of the Class Recall for detection of the users’ location’s on Floor 0: P(User 8) = P(User 10) = P(User 13) = P(User 17) = P(User 9) > P(User 7) > P(User 14) > P(User 1) > P(User 11) > P(User 16) > P(Average User). Here, the performance characteristics of User 2, User 3, User 4, User 5, User 6, User 12, User 15, and User 18 were not included in the analysis as those users were never present on Floor 0.
- In terms of the Class Precision for detection of the users’ location’s on Floor 1: P(User 13) = P(User 12) = P(User 15) = P(User 18) > P(User 7) > P(User 14) > P(User 1) > P(User 11) > P(User 16) > P(Average User). Here the performance characteristics of User 2, User 3, User 4, User 5, User 6, User 8, User 9, User 10, and User 17 were not included in the analysis as those users were never present on Floor 1.
- In terms of the Class Recall for detection of the users’ location’s on Floor 1: P(User 13) = P(User 12) = P(User 15) = P(User 18) > P(User 14) > P(User 16) > P(User 1) > P(User 7) > P(User 11) > P(Average User). Here the performance characteristics of User 2, User 3, User 4, User 5, User 6, User 8, User 9, User 10, and User 17 were not included in the analysis as those users were never present on Floor 1.
- In terms of the Class Precision for detection of the users’ location’s on Floor 2: P(User 14) = P(User 10) = P(User 2) = P(User 4) = P(User 5) > P(User 9) > P(User 1) > P(User 11) > P(Average User). Here, the performance characteristics of User 3, User 6, User 7, User 8, User 12, User 13, User 15, User 16, User 17, and User 18 were not included in the analysis as those users were never present on Floor 2.
- In terms of the Class Recall for detection of the users’ location’s on Floor 2: P(User 10) = P(User 2) = P(User 4) > P(User 5) > P(User 9) > P(User 14) > P(User 11) > P(User 1) > P(Average User). Here, the performance characteristics of User 3, User 6, User 7, User 8, User 12, User 13, User 15, User 16, User 17, and User 18 were not included in the analysis as those users were never present on Floor 2.
- In terms of the Class Precision for detection of the users’ locations on Floor 3: P(User 10) = P(User 2) = P(User 5) = P(User 18) = P(User 8) = P(User 17) = P(User 6) > P(User 14) > P(User 9) > P(User 11) > P(User 1) > P(Average User). Here, the performance characteristics of User 3, User 4, User 7, User 12, User 13, User 15, and User 16 were not included in the analysis as those users were never present on Floor 3.
- In terms of the Class Recall for detection of the users’ locations on Floor 3: P(User 10) = P(User 2) = P(User 5) = P(User 18) = P(User 8) = P(User 17) = P(User 6) > P(User 14) > P(User 1) > P(User 9) > P(User 11) > P(Average User). Here, the performance characteristics of User 3, User 4, User 7, User 12, User 13, User 15, and User 16 were not included in the analysis as those users were never present on Floor 3.
- In terms of the Class Precision for detection of the users’ locations on Floor 4: P(User 6) = P(User 13) = P(User 3) > Average User. Here, the performance characteristics of the other users were not included because other than User 6, User 13, and User 3, none of the other users were present on Floor 4.
- In terms of the Class Recall for detection of the users’ locations on Floor 4: (User 6) = P(User 13) = P(User 3) > Average User. Here, the performance characteristics of the other users were not included because other than User 6, User 13, and User 3, none of the other users were present on Floor 4.
- In terms of overall performance accuracy: P(User 1) = P(User 3) = P(User 13) > P(User 6) > P(User 5) > P(User 14) > P(User 18) > P(User 9) > P(User 12) > P(User 4) > P(User 16) > P(User 10) > P(User 11) > P(User 17) > P(User 8) > P(User 15) > P(User 2) > P(User 7) > P(Average User)
- In terms of class precision for detecting a user inside a given spatial region: P(User 13) = P(User 6) = P(User 5) > P(User 14) > P(User 4) > P(User 16) > P(User 9) > P(User 12) > P(User 10) > P(User 18) > P(User 15) > P(User 11) > P(User 17) > P(User 8) > P(User 2) > P(User 7) > P(Average User). Here the User 1 and User 3 were considered in the analysis as they were never present inside the confines of a spatial region.
- In terms of class recall for detecting a user inside a given spatial region: P(User 13) > P(User 7) > P(User 12) > P(User 17) > P(User 14) > P(User 4) > P(User 10) > P(User 6) > P(User 18) > P(User 8) > P(User 16) > P(User 9) > P(User 5) > P(User 11) > P(User 15) > P(User 2) > P(Average User). Here the User 1 and User 3 were considered in the analysis as they were never present inside the confines of a spatial region.
- In terms of class precision for detecting a user outside a given spatial region: P(User 13) > P(User 1) > P(User 3) > P(User 6) > P(User 5) > P(User 14) > P(User 7) > P(User 12) > P(User 18) > P(User 17) > P(User 11) > P(User 9) > P(User 10) > P(User 8) > P(User 16) > P(User 4) > P(User 2) > P(Average User) > P(User 15). Here even though P(Average User) was greater than P(User 15), the difference between these values was 0.0138, which was not significant.
- In terms of class precision for detecting a user outside a given spatial region: P(User 13) = P(User 1) = P(User 3) = P(User 6) = P(User 5) > P(User 14) > P(User 9) > P(User 16) > P(User 4) > P(User 18) > P(User 11) > P(User 10) > P(User 15) > P(User 12) > P(User 8) > P(User 2) > P(User 17) > P(User 7) > P(Average User)
5. Comparative Discussion
- Researchers [54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69] in this field have focused on defining an average user in terms of certain attributes such as cognitive, behavioral, perceptual, and mental abilities and then developing indoor localization-based AAL systems to meet the needs of the average user. In the real world, no such average user exists. The user interaction patterns in terms of behavioral, navigational, and localization-related characteristics of each user are different and determined by the diverse characteristic traits specific to a given user, which could include different levels of cognitive, behavioral, perceptual, and mental abilities, just to name a few. Due to this difference in needs and abilities of each specific user, they quite often do not ‘fit’ into the definition of an average user for whom an AAL system is developed, which results in the ineffectiveness or failure of the associated AAL system to address the needs of a specific user. It is crucial for the future of AAL systems to have a “personalized” touch so that such systems can cater to the dynamic and diverse needs of each specific user. Our framework addresses this challenge in multiple ways. First, it presents a probabilistic reasoning-based mathematical approach (Equations (1)–(3)) to model all the diverse ways by which any given activity can be performed by different users based on internal factors such as physical, mental, cognitive, psychological, and emotional factors, and external factors such as environment variables and context attributes [28,29,30], that are specific to each user. This analysis is done by breaking down the activity into fine-grain components—atomic activities, context attributes, core atomic activities, core context attributes, other atomic activities, other context attributes, start atomic activities, end atomic activities, start context attributes, and end context attributes (Table 1). Second, our framework consists of the methodology (Section 3) to model multimodal components of the indoor location of each specific user by modeling every user in terms of their distinct behavioral, navigational, and localization-related characteristics during different activities. Upon testing our approach on a dataset that consisted of 18 different users, each of whom exhibited different behavioral, navigational, and localization-related characteristics during different activities we observed that the performance characteristics (in terms of overall accuracy, class precision, and class recall values) of modeling each specific user are always higher than the traditional approach of modeling an average user (Table 3 and Table 4).
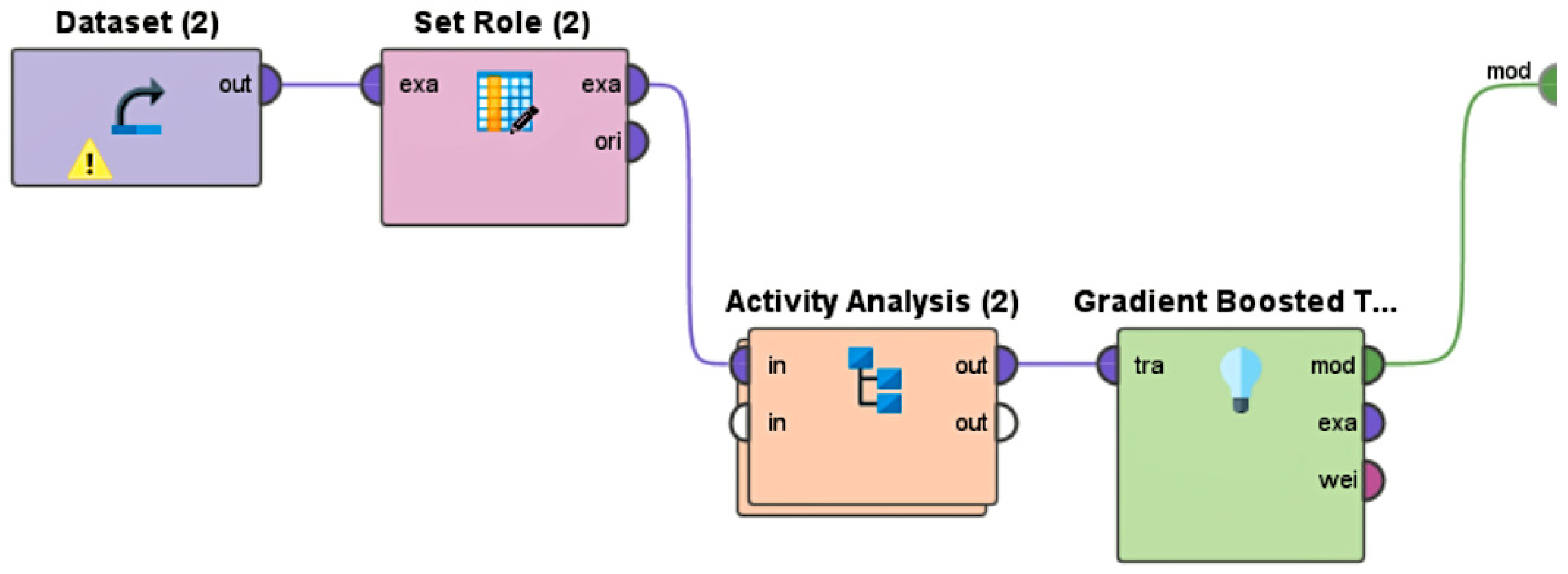
- Prior works [33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48] in this field that used different forms of machine learning and artificial intelligence approaches to detect the indoor location of a user have used some of the major machine learning approaches without any attempts to boost the performance accuracies of the underlining systems and applications. For the seamless acceptance of the future of AAL technologies that can adapt with respect to the diverse needs of different users, it is crucial to investigate approaches for improving the performance accuracies of such AAL systems. Gradient Boosting and AdaBoost learning approaches are two amongst the most popular methodologies for boosting the performance accuracies of machine learning systems while removing overfitting of data and false positives [85]. Both the Gradient Boosted approach and the AdaBoost approach have achieved promising results in the field of activity recognition for boosting the performance characteristics of machine learning-based activity recognition systems on which they were applied [86,87,88,89]. However, these boosting approaches have not been investigated for indoor localization. Moreover, a combination of these two boosting approaches to achieve even higher performance accuracies has not been investigated before in this field of research. Therefore, our framework implements these two boosting approaches together on the decision tree classifier for modeling specific users to detect multimodal components of their indoor location, which includes detecting the floor the specific user is located on (Table 3) and tracking whether the specific user is located inside or outside a given indoor spatial region (Table 4) at a given point of time. Table 5 shows a comparison of different works in the field of indoor localization that used machine learning systems to further uphold the fact that our framework is the first work in this field that used a combination of two boosting approaches to achieve high-performance accuracies while modeling specific users as per their diverse characteristics leading to varying user interactions.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work(s) | Machine Learning Approach | Gradient Boosting | AdaBoost |
|---|---|---|---|
| Varma et al. [33], Gao et al. [34] | Random Forest | - | - |
| Khan et al. [35], Labinghisa et al. [36], Qin et al. [37] | Artificial Neural Network | - | - |
| Musa et al. [38], Yim et al. [39] | Decision Tree | - | - |
| Sjoberg et al. [40], Zhang et al. [41] | Support Vector Machine | - | - |
| Zhang et al. [42], Ge et al. [43], Hu et al. [44] | k-NN | - | - |
| Zhang et al. [45], Poulose et al. [46] | Deep Learning | - | - |
| Jamâa et al. [47], Barsocchi et al. [48] | Linear Regression | - | - |
| Thakur et al. [this work] | Decision Tree | ✓ | ✓ |
- 3.
- Research works [54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69] in this field that used the data from multiple users to train the underlining machine learning systems did not have a significant number of participants or volunteers to represent the diversity of actual users. In view of the diversity of the elderly and their varying associated needs, both temporary and permanent, on account of their declining abilities of different degrees, it is crucial that such AAL-based machine learning systems are trained with sufficient data from different users so that the underlining systems are familiar with the user diversity and can achieve high levels of performance accuracy while detecting the location-related information of specific users. Table 6 shows the comparison of our framework with similar works in this field that used the data from one or more users for proposing indoor localization systems. As can be seen from Table 6, our framework uses the maximum number of users to train the boosted learning approach (Section 3) with an aim to train the learning model on diverse user interaction patterns arising from different users while being able to model each of these users by taking into consideration the specific characteristics of their behavioral, navigational, and localization-related information.
| Work(s) | Number of Users |
|---|---|
| Xu et al. [63] | 2 |
| Qian et al. [57] | 3 |
| Fusco et al. [58] | 3 |
| Chang et al. [59] | 3 |
| Wang et al. [64] | 3 |
| Kothari et al. [56] | 4 |
| Subbu et al. [60] | 4 |
| Röbesaat et al. [65] | 4 |
| Wu et al. [67] | 4 |
| Chen et al. [62] | 6 |
| Gu et al. [68] | 8 |
| Zhou et al. [61] | 10 |
| Murata et al. [54] | 10 |
| Yoo et al. [55] | 10 |
| Yang et al. [66] | 10 |
| Niu et al. [69] | 15 |
| Thakur et al. [this work] | 18 |
- 4.
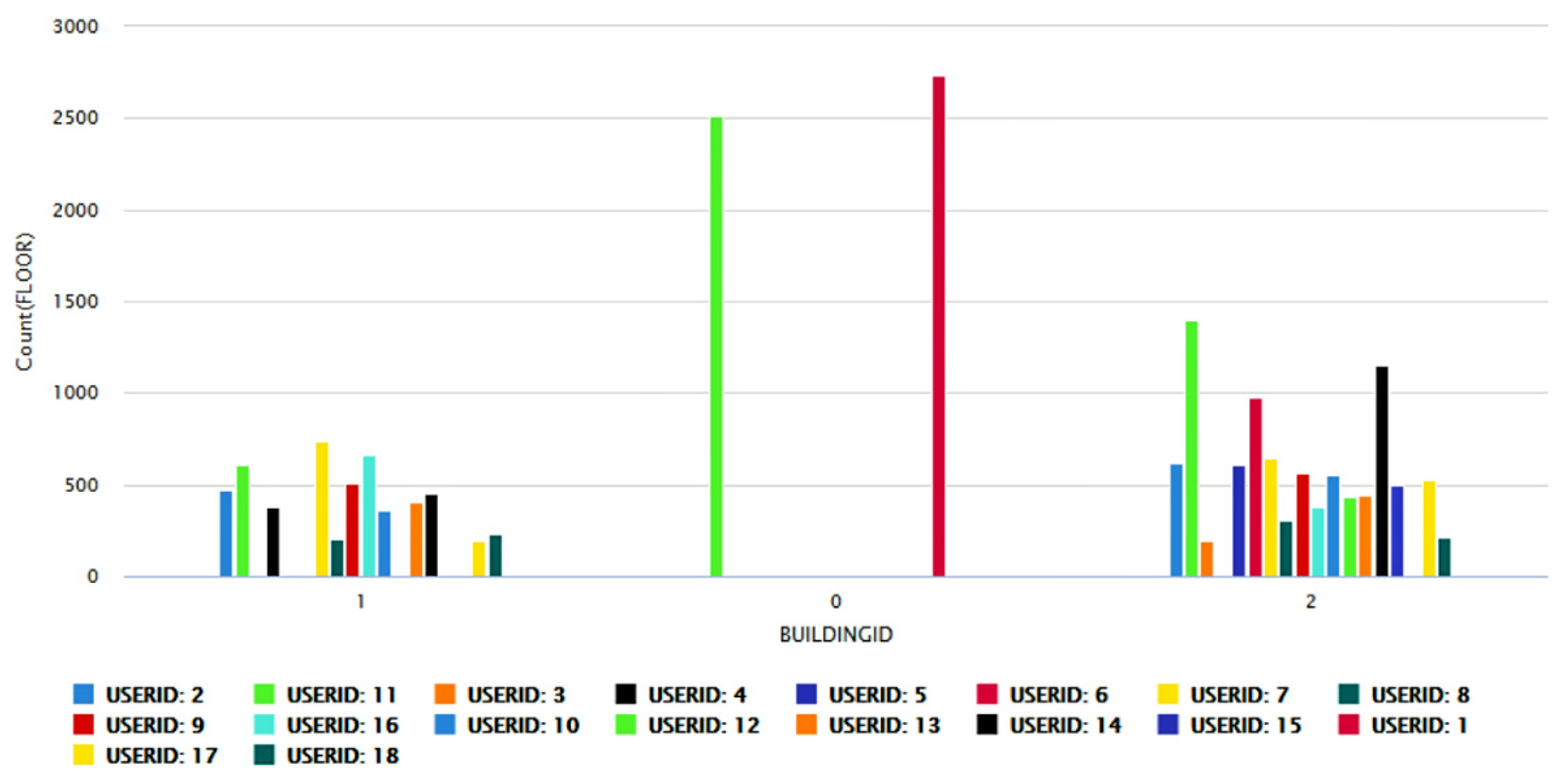
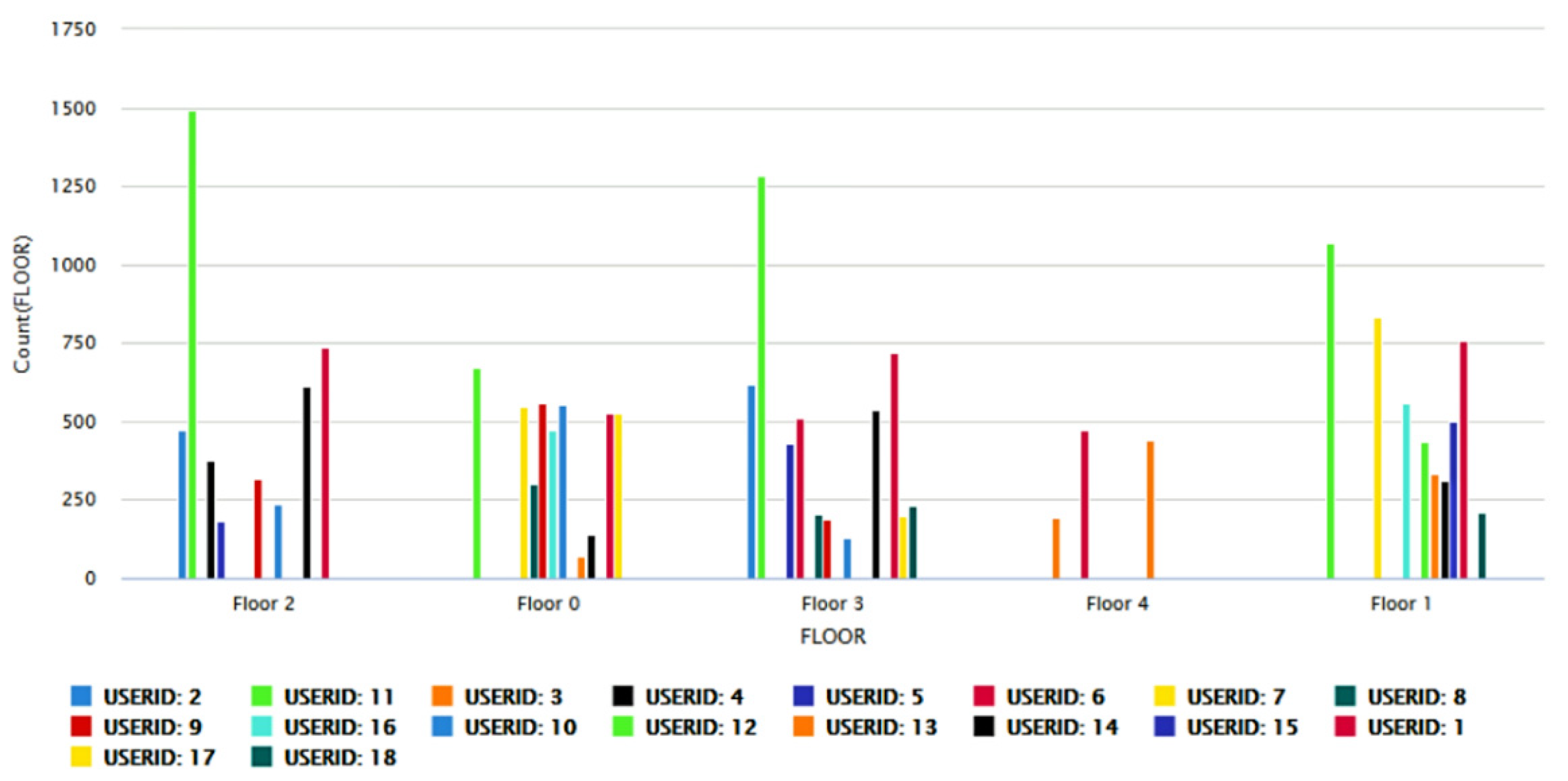
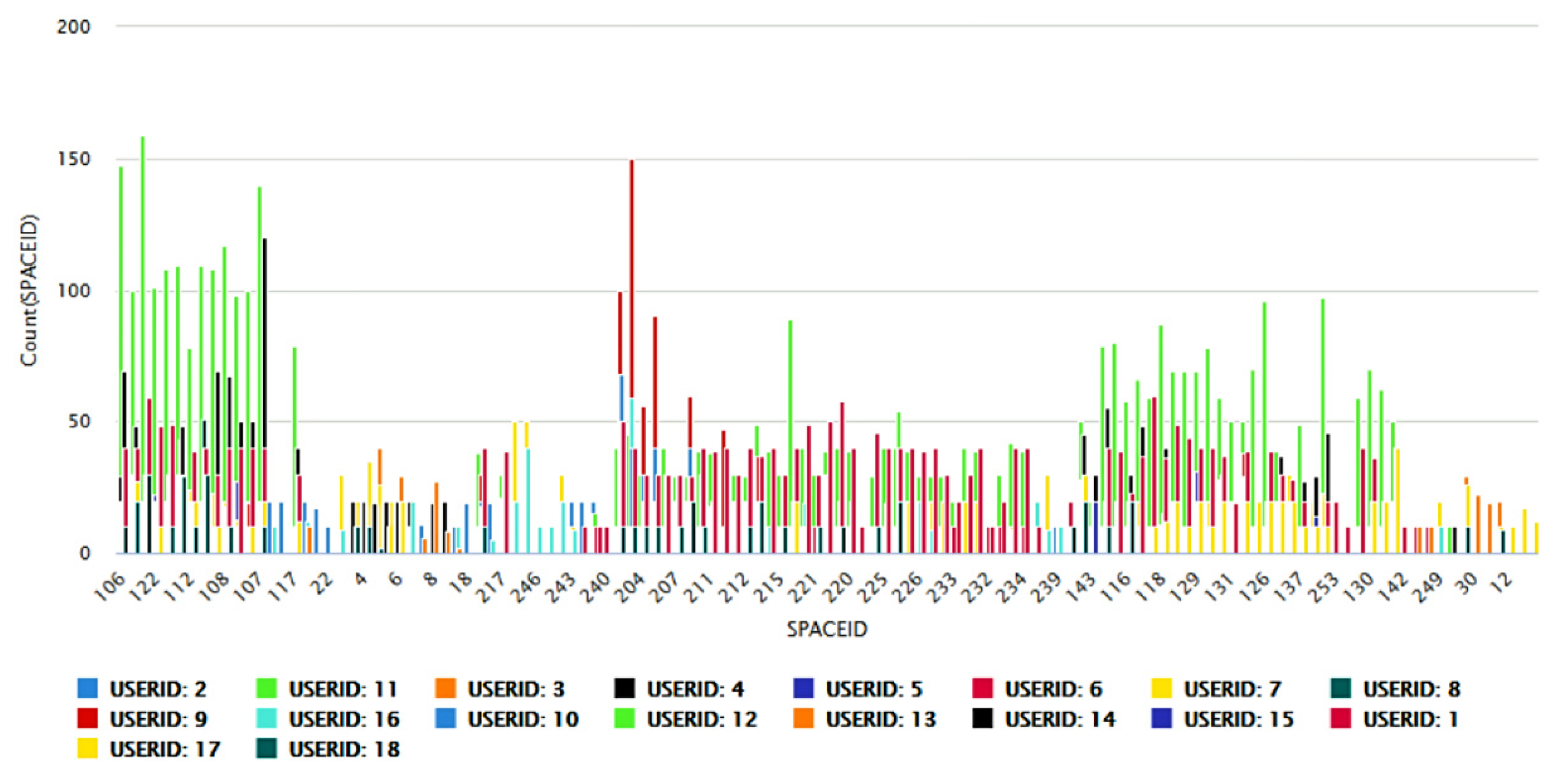
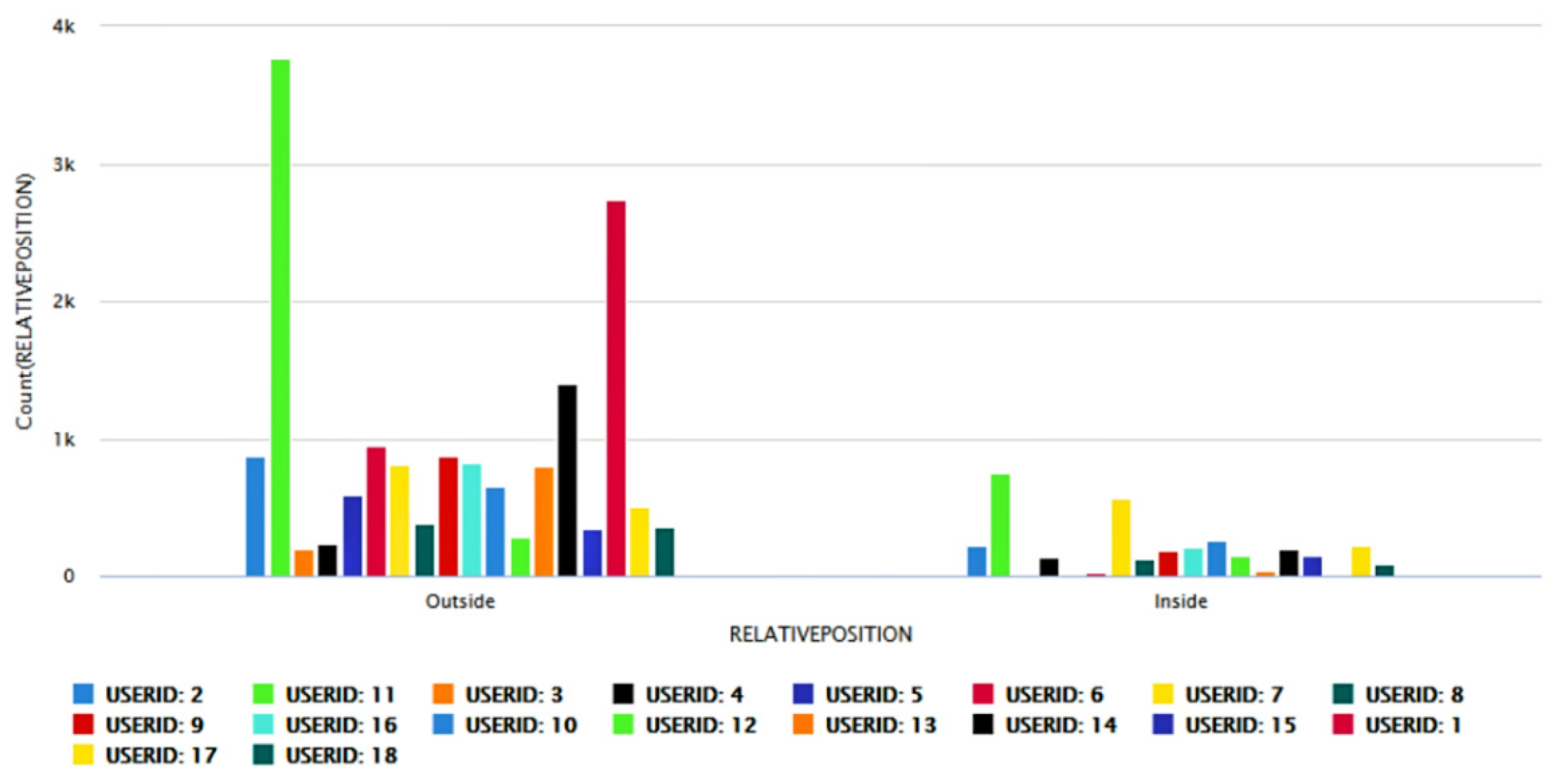
- The indoor localization-related works in this field have mostly focused on detecting the X and Y coordinate of the user’s position. The X and Y coordinate information of a user’s indoor position are important attributes of the location information. However, in a real-world scenario where the user could be located in certain spatial regions, such as an apartment which could be located on a specific floor inside a multistoried building, just the X and Y coordinates do not provide enough context as far as the user’s location is concerned. In other words, it is not possible to detect the floor or spatial information (such as inside or outside a given indoor spatial region) of a user’s location just based on the interpretation of the X and Y coordinate information. This lack of semantic context is likely to lead to delay of care for the elderly for emergency needs such as unconsciousness from a fall, as the emergency responders or healthcare providers would have to resort to a trial-and-error approach until they arrive at the specific floor and in the specific spatial region where the elderly might be located in the multistoried building. Our framework addresses this challenge by being able to detect the floor information (Section 3, Table 3) as well as the dynamic spatial information of the user in terms of whether the user is located inside or outside a given spatial region which is located indoors (Section 3, Table 4). With the methodology to model individual user profiles for personalized indoor localization, our framework achieves high accuracies for floor detection as well as for indoor spatial region detection by using a novel methodology that involved the integration of two boosting approaches. Upon testing of our framework by using a dataset that consisted of the data of 18 different users, each of whom exhibited different behavioral, navigational, and localization-related characteristics during different activities, performed in 3 buildings consisting of 5 floors and 254 spatial regions; we observed that for multiple users our framework achieved 100% accuracy both for floor detection and for spatial information detection. Table 7 shows how this functionality of spatial information detection in terms of detecting whether a user is present inside or outside the confines of an indoor spatial region addresses the limitations in similar works [49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69] in this field in terms of functionality and operational features.
| Work(s) | Indoor Location Detection | Indoor Spatial Information |
|---|---|---|
| Bolic et al. [49] | ✓ | - |
| Angermann et al. [50] | ✓ | - |
| Evennou et al. [51] | ✓ | - |
| Wang et al. [52] | ✓ | - |
| Klingbeil et al. [53] | ✓ | - |
| Xu et al. [63] | ✓ | - |
| Qian et al. [57] | ✓ | - |
| Fusco et al. [58] | ✓ | - |
| Chang et al. [59] | ✓ | - |
| Wang et al. [64] | ✓ | - |
| Kothari et al. [56] | ✓ | - |
| Subbu et al. [60] | ✓ | - |
| Röbesaat et al. [65] | ✓ | - |
| Wu et al. [67] | ✓ | - |
| Chen et al. [62] | ✓ | - |
| Gu et al. [68] | ✓ | - |
| Zhou et al. [61] | ✓ | - |
| Murata et al. [54] | ✓ | - |
| Yoo et al. [55] | ✓ | - |
| Yang et al. [66] | ✓ | - |
| Niu et al. [69] | ✓ | - |
| Thakur et al. [this work] | ✓ | ✓ |
- 5.
- While there have been a few works [74,75,76,77,78,79,80] in indoor floor detection in the recent past, the underlining systems are not highly accurate to support their widescale deployment and real time implementation. To contribute towards increased trust in technology and seamless integration of such AAL systems, it is crucial that the future of indoor floor detection systems consist of the functionality to detect the floor-level information of the user’s indoor position in a highly accurate manner while removing false positives and overfitting of data. By implementing a novel approach that involves the use of two boosting algorithms—Gradient Boosting and the AdaBoost algorithm [85] via the use of the k-folds cross-validation, our framework addresses these issues of false positives and overfitting of data while being able to detect the floor-level information of the user’s indoor position with a high level of accuracy. Table 8 shows the comparison of the performance characteristics of the floor detection functionality of our framework with these recent works that outline how our framework outperforms all these recent works in this field of research. In Table 8, we list the performance accuracy of our framework for floor detection as 100% because it achieved 100% accuracy for multiple users, as presented in Table 3.
6. Conclusions and Scope for Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhavoronkov, A.; Bischof, E.; Lee, K.-F. Artificial intelligence in longevity medicine. Nat. Aging 2021, 1, 5–7. [Google Scholar] [CrossRef]
- Decade of Healthy Ageing (2021–2030). Available online: https://www.who.int/initiatives/decade-of-healthy-ageing (accessed on 28 June 2021).
- WHO. Ageing and Health. Available online: https://www.who.Int/news-room/fact-sheets/detail/ageing-and-health (accessed on 20 December 2020).
- Thakur, N.; Han, C. An Ambient Intelligence-Based Human Behavior Monitoring Framework for Ubiquitous Environments. Information 2021, 12, 81. [Google Scholar] [CrossRef]
- Peine, A.; Marshall, B.L.; Martin, W.; Neven, L. (Eds.) Socio-Gerontechnology: Interdisciplinary Critical Studies of Ageing and Technology; Routledge: London, UK, 2021; Available online: https://play.google.com/store/books/details?id=QfkWEAAAQBAJ (accessed on 18 February 2021).
- Chai, H.; Fu, R.; Coyte, P.C. Unpaid Caregiving and Labor Force Participation among Chinese Middle-Aged Adults. Int. J. Environ. Res. Public Health 2021, 18, 641. [Google Scholar] [CrossRef]
- Kadambi, S.; Loh, K.P.; Dunne, R.; Magnuson, A.; Maggiore, R.; Zittel, J.; Flannery, M.; Inglis, J.; Gilmore, N.; Mohamed, M.; et al. Older adults with cancer and their caregivers—current landscape and future directions for clinical care. Nat. Rev. Clin. Oncol. 2020, 17, 742–755. [Google Scholar] [CrossRef]
- Flaherty, E.; Bartels, S.J. Addressing the Community-Based Geriatric Healthcare Workforce Shortage by Leveraging the Potential of Interprofessional Teams. J. Am. Geriatr. Soc. 2019, 67, S400–S408. [Google Scholar] [CrossRef] [Green Version]
- Feng, Z.; Glinskaya, E.; Chen, H.; Gong, S.; Qiu, Y.; Xu, J.; Yip, W. Long-term care system for older adults in China: Policy landscape, challenges, and future prospects. Lancet 2020, 396, 1362–1372. [Google Scholar] [CrossRef]
- Javed, A.R.; Fahad, L.G.; Farhan, A.A.; Abbas, S.; Srivastava, G.; Parizi, R.M.; Khan, M.S. Automated cognitive health assessment in smart homes using machine learning. Sustain. Cities Soc. 2020, 65, 102572. [Google Scholar] [CrossRef]
- United Nations. 68% of the World Population Projected to Live in Urban Areas by 2050, Says UN. 2018. Available online: https://www.un.org/development/desa/en/news/population/2018-revision-of-world-urbanization-prospects.html (accessed on 6 February 2021).
- Furman, S.; Haney, J. Is my home smart or just connected? In Artificial Intelligence in HCI; Springer International Publishing: Cham, Switzerland, 2020; pp. 273–287. [Google Scholar]
- Patro, S.P.; Padhy, N.; Chiranjevi, D. Ambient assisted living predictive model for cardiovascular disease prediction using supervised learning. Evol. Intell. 2020, 14, 941–969. [Google Scholar] [CrossRef]
- Smirek, L.; Zimmermann, G.; Beigl, M. Just a Smart Home or Your Smart Home—A Framework for Personalized User Interfaces Based on Eclipse Smart Home and Universal Remote Console. Procedia Comput. Sci. 2016, 98, 107–116. [Google Scholar] [CrossRef] [Green Version]
- Marcus, A.; Aykin, N.; Chavan, A.L.; Prabhu, G.V.; Kurosu, M. SIG on one size fits all? Cultural diversity in user interface design. In Proceedings of the Extended Abstracts on Human Factors in Computing Systems—CHI ’99, Pittsburg, PY, USA, 15–20 May 1999; ACM Press: New York, NY, USA, 1999. [Google Scholar]
- Iancu, I.; Iancu, B. Designing mobile technology for elderly. A theoretical overview. Technol. Forecast. Soc. Chang. 2020, 155, 119977. [Google Scholar] [CrossRef]
- Stonebraker, M.; Çetintemel, U. “One size fits all”: An idea whose time has come and gone. In Making Databases Work: The Pragmatic Wisdom of Michael Stonebraker; Association for Computing Machinery: New York, NY, USA, 2018; pp. 441–462. [Google Scholar]
- Yahya, M.A.; Dahanayake, A. A Needs-Based Augmented Reality System. Appl. Sci. 2021, 11, 7978. [Google Scholar] [CrossRef]
- Imam, M.; Savioz, P.; O’Suilleabhain, C. IoT bridge components—Specialized smart monitoring solutions to address us-er-specific needs. In Bridge Maintenance, Safety, Management, Life-Cycle Sustainability and Innovations; CRC Press: Boca Raton, FL, USA, 2021; p. 217. [Google Scholar]
- Phillips, B.; Zhao, H. Predictors of Assistive Technology Abandonment. Assist. Technol. 1993, 5, 36–45. [Google Scholar] [CrossRef]
- Dawe, M. Desperately seeking simplicity: How young adults with cognitive disabilities and their families adopt assistive technologies. In Proceedings of the SIGCHI Conference On Human Factors In Computing Systems—CHI ’06, Montreal, QC, Canada, 22–27 April 2006; ACM Press: New York, NY, USA, 2006. [Google Scholar]
- Gajos, K.Z.; Weld, D.S.; Wobbrock, J.O. Automatically generating personalized user interfaces with Supple. Artif. Intell. 2010, 174, 910–950. [Google Scholar] [CrossRef] [Green Version]
- Chaki, D.; Bouguettaya, A.; Mistry, S. A Conflict Detection Framework for IoT Services in Multi-resident Smart Homes. In Proceedings of the International Conference on Web Services, Beijing, China, 19–23 October 2020; pp. 224–231. [Google Scholar] [CrossRef]
- Sikder, A.K.; Babun, L.; Celik, Z.B.; Acar, A.; Aksu, H.; McDaniel, P.; Kirda, E.; Uluagac, A.S. Kratos: Multi-user multi-device-aware access control system for the smart home. In Proceedings of the 13th ACM Conference on Security and Privacy in Wireless and Mobile Networks, Linz, Austria, 8–10 July 2020; ACM: New York, NY, USA, 2020. [Google Scholar]
- Wilkowska, W.; Ziefle, M. User diversity as a challenge for the integration of medical technology into future smart home environments. In User-Driven Healthcare; IGI Global: Hershey, PA, USA, 2012; pp. 553–582. [Google Scholar]
- Li, Q.; Gravina, R.; Li, Y.; Alsamhi, S.H.; Sun, F.; Fortino, G. Multi-user activity recognition: Challenges and opportunities. Inf. Fusion 2020, 63, 121–135. [Google Scholar] [CrossRef]
- Thakur, N.; Han, C.Y. A review of assistive technologies for Activities of Daily Living of elderly. arXiv 2021, arXiv:2106.12183. [Google Scholar]
- Kaptelinin, V.; Nardi, B. Activity Theory in HCI: Fundamentals and Reflections. Synth. Lect. Hum.-Cent. Inform. 2012, 5, 1–105. [Google Scholar] [CrossRef]
- Allen, D.; Karanasios, S.; Slavova, M. Working with activity theory: Context, technology, and information behavior. J. Am. Soc. Inf. Sci. Technol. 2011, 62, 776–788. [Google Scholar] [CrossRef] [Green Version]
- Miller, H.J. Activity-Based Analysis. In Handbook of Regional Science; Springer: Berlin/Heidelber, Germany, 2021; pp. 187–207. [Google Scholar]
- Thakur, N.; Han, C. Multimodal Approaches for Indoor Localization for Ambient Assisted Living in Smart Homes. Information 2021, 12, 114. [Google Scholar] [CrossRef]
- Langlois, C.; Tiku, S.; Pasricha, S. Indoor Localization with Smartphones: Harnessing the Sensor Suite in Your Pocket. IEEE Consum. Electron. Mag. 2017, 6, 70–80. [Google Scholar] [CrossRef]
- Varma, P.S.; Anand, V. Random Forest Learning Based Indoor Localization as an IoT Service for Smart Buildings. Wirel. Pers. Commun. 2020, 117, 3209–3227. [Google Scholar] [CrossRef]
- Gao, J.; Li, X.; Ding, Y.; Su, Q.; Liu, Z. WiFi-based indoor positioning by random forest and adjusted cosine similarity. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 21–23 May 2020; pp. 1426–1431. [Google Scholar]
- Ullah Khan, I.; Ali, T.; Farid, Z.; Scavino, E.; Amiruddin Abd Rahman, M.; Hamdi, M.; Qiao, G. An improved hybrid indoor posi-tioning system based on surface tessellation artificial neural network. Meas. Control. 2020, 53, 1968–1977. [Google Scholar] [CrossRef]
- Labinghisa, B.A.; Lee, D.M. Neural network-based indoor localization system with enhanced virtual access points. J. Supercomput. 2020, 77, 638–651. [Google Scholar] [CrossRef]
- Qin, F.; Zuo, T.; Wang, X. CCpos: WiFi Fingerprint Indoor Positioning System Based on CDAE-CNN. Sensors 2021, 21, 1114. [Google Scholar] [CrossRef]
- Musa, A.; Nugraha, G.D.; Han, H.; Choi, D.; Seo, S.; Kim, J. A decision tree-based NLOS detection method for the UWB indoor location tracking accuracy improvement: Decision-Tree NLOS Detection for the UWB Indoor Location Tracking. Int. J. Commun. Syst. 2019, 32, e3997. [Google Scholar] [CrossRef]
- Yim, J. Introducing a decision tree-based indoor positioning technique. Expert Syst. Appl. 2006, 34, 1296–1302. [Google Scholar] [CrossRef]
- Sjoberg, M.; Koskela, M.; Viitaniemi, V.; Laaksonen, J. Indoor location recognition using fusion of SVM-based visual classifiers. In Proceedings of the 2010 IEEE International Workshop on Machine Learning for Signal Processing, Kitilla, Finland, 29 August–1 September 2010. [Google Scholar]
- Zhang, S.; Guo, J.; Wang, W.; Hu, J. Indoor 2.5D Positioning of WiFi Based on SVM. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018. [Google Scholar]
- Zhang, L.; Zhao, C.; Wang, Y.; Dai, L. Fingerprint-based indoor localization using weighted K-nearest neighbor and weighted signal intensity. In Proceedings of the 2nd International Conference on Artificial Intelligence and Advanced Manufacture, Manchester, UK, 15–17 October 2020; ACM: New York, NY, USA, 2020. [Google Scholar]
- Ge, X.; Qu, Z. Optimization WIFI indoor positioning KNN algorithm location-based fingerprint. In Proceedings of the 2016 7th IEEE International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 26–28 August 2016; pp. 135–137. [Google Scholar]
- Hu, J.; Liu, D.; Yan, Z.; Liu, H. Experimental Analysis on Weight K-Nearest Neighbor Indoor Fingerprint Positioning. IEEE Internet Things, J. 2018, 6, 891–897. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, Y. A 3D mobile positioning method based on deep learning for hospital applications. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 170. [Google Scholar] [CrossRef]
- Poulose, A.; Han, D.S. Hybrid Deep Learning Model Based Indoor Positioning Using Wi-Fi RSSI Heat Maps for Autonomous Applications. Electronics 2020, 10, 2. [Google Scholar] [CrossRef]
- Ben Jamâa, M.; Koubâa, A.; Baccour, N.; Kayani, Y.; Al-Shalfan, K.; Jmaiel, M. EasyLoc: Plug-and-Play RSS-Based Localization in Wireless Sensor Networks. In Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2013; pp. 77–98. [Google Scholar] [CrossRef]
- Barsocchi, P.; Lenzi, S.; Chessa, S.; Furfari, F. Automatic virtual calibration of range-based indoor localization systems. Wirel. Commun. Mob. Comput. 2011, 12, 1546–1557. [Google Scholar] [CrossRef] [Green Version]
- Bolic, M.; Rostamian, M.; Djuric, P.M. Proximity Detection with RFID: A Step Toward the Internet of Things. IEEE Pervasive Comput. 2015, 14, 70–76. [Google Scholar] [CrossRef]
- Angermann, M.; Robertson, P. FootSLAM: Pedestrian simultaneous localization and mapping without exteroceptive sensors—hitchhiking on human perception and cognition. Proc. IEEE Inst. Electr. Electron. Eng. 2012, 100, 1840–1848. [Google Scholar] [CrossRef]
- Evennou, F.; Marx, F. Advanced Integration of WiFi and Inertial Navigation Systems for Indoor Mobile Positioning. EURASIP J. Adv. Signal. Process. 2006, 2006, 086706. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Lenz, H.; Szabo, A.; Bamberger, J.; Hanebeck, U. WLAN-Based Pedestrian Tracking Using Particle Filters and Low-Cost MEMS Sensors. In Proceedings of the 2007 4th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 23–24 October 2007; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Klingbeil, L.; Wark, T. A wireless sensor network for real-time indoor localisation and motion monitoring. In Proceedings of the 2008 International Conference on Information Processing in Sensor Networks (IPSN 2008), St. Louis, MO, USA, 22–24 April 2008; pp. 39–50. [Google Scholar]
- Murata, M.; Ahmetovic, D.; Sato, D.; Takagi, H.; Kitani, K.M.; Asakawa, C. Smartphone-based indoor localization for blind navigation across building complexes. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications (PerCom), Athens, Greece, 19–23 March 2018. [Google Scholar]
- Yoo, J.; Johansson, K.H.; Kim, H.J. Indoor Localization without a Prior Map by Trajectory Learning From Crowdsourced Measurements. IEEE Trans. Instrum. Meas. 2017, 66, 2825–2835. [Google Scholar] [CrossRef]
- Kothari, N.; Kannan, B.; Glasgwow, E.D.; Dias, M.B. Robust Indoor Localization on a Commercial Smart Phone. Procedia Comput. Sci. 2012, 10, 1114–1120. [Google Scholar] [CrossRef] [Green Version]
- Qian, J.; Ma, J.; Ying, R.; Liu, P.; Pei, L. An improved indoor localization method using smartphone inertial sensors. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard, France, 28–31 October 2013; pp. 1–7. [Google Scholar]
- Fusco, G.; Coughlan, J.M. Indoor Localization Using Computer Vision and Visual-Inertial Odometry. Comput. Help People Spec. Needs 2018, 10897, 86–93. [Google Scholar] [CrossRef] [Green Version]
- Chang, R.Y.; Liu, S.-J.; Cheng, Y.-K. Device-Free Indoor Localization Using Wi-Fi Channel State Information for Internet of Things. In Proceedings of the 2018, IEEE Global Communication Conference, Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Pathapati Subbu, K.; Gozick, B.; Dantu, R. Indoor localization through dynamic time warping. In Proceedings of the 2011 IEEE International Conference on Systems, Man, and Cybernetics, Anchorage, AK, USA, 9–12 October 2011; pp. 1639–1644. [Google Scholar]
- Zhou, B.; Yang, J.; Li, Q. Smartphone-Based Activity Recognition for Indoor Localization Using a Convolutional Neural Network. Sensors 2019, 19, 621. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Ou, G.; Peng, A.; Zheng, L.; Shi, J. An INS/WiFi Indoor Localization System Based on the Weighted Least Squares. Sensors 2018, 18, 1458. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Yang, Z.; Zhou, Z.; Shangguan, L.; Yi, K.; Liu, Y. Indoor localization via multi-modal sensing on smartphones. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; ACM: New York, NY, USA, 2016. [Google Scholar]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No need to war-drive: Unsupervised indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services—MobiSys ’12, Wood Bay Lake, UK, 25–29 June 2012; ACM Press: New York, NY, USA, 2012; pp. 197–210. [Google Scholar]
- Röbesaat, J.; Zhang, P.; Abdelaal, M.; Theel, O. An improved BLE indoor localization with Kalman-based fusion: An experimental study. Sensors 2017, 17, 951. [Google Scholar] [CrossRef]
- Yang, Z.; Feng, X.; Zhang, Q. Adometer: Push the Limit of Pedestrian Indoor Localization through Cooperation. IEEE Trans. Mob. Comput. 2014, 13, 2473–2483. [Google Scholar] [CrossRef]
- Wu, C.; Yang, Z.; Liu, Y. Smartphones Based Crowdsourcing for Indoor Localization. IEEE Trans. Mob. Comput. 2014, 14, 444–457. [Google Scholar] [CrossRef]
- Gu, F.; Khoshelham, K.; Shang, J.; Yu, F.; Wei, Z. Robust and Accurate Smartphone-Based Step Counting for Indoor Localization. IEEE Sens. J. 2017, 17, 3453–3460. [Google Scholar] [CrossRef]
- Niu, X.; Zhang, Z.; Wang, A.; Liu, J.; Liu, S. Online learning-based WIFI radio map updating considering high-dynamic envi-ronmental factors. IEEE Access 2019, 7, 110074–110085. [Google Scholar] [CrossRef]
- Gkoufas, Y.; Katrinis, K. Copernicus: A robust AI-centric indoor positioning system. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), La Cite, France, 24–27 September 2018; pp. 206–212. [Google Scholar]
- Gkoufas, Y.; Braghin, S. Anatomy and deployment of robust AI-centric indoor positioning system. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Pisa, Italy, 21–25 March 2019; pp. 340–342. [Google Scholar]
- Zemouri, S.; Magoni, D.; Zemouri, A.; Gkoufas, Y.; Katrinis, K.; Murphy, J. An Edge Computing Approach to Explore Indoor Environmental Sensor Data for Occupancy Measurement in Office Spaces. In Proceedings of the 2018 International Smart Cities Conference, Kansas City, MI, USA, 16–19 September 2018; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Zemouri, S.; Gkoufas, Y.; Murphy, J. A machine learning approach to indoor occupancy detection using non-intrusive en-vironmental sensor data. In Proceedings of the 3rd International Conference on Big Data and Internet of Things—BDIOT 2019, Melbourn, Australia, 22–24 August 2019; ACM Press: New York, NY, USA, 2019. [Google Scholar]
- Alsehly, F.; Arslan, T.; Sevak, Z. Indoor positioning with floor determination in multi story buildings. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaeres, Portugal, 21–23 September 2011; pp. 1–7. [Google Scholar]
- Campos, R.S.; Lovisolo, L.; Campos, M. Wi-Fi multi-floor indoor positioning considering architectural aspects and controlled computational complexity. Expert Syst. Appl. 2014, 41, 6211–6223. [Google Scholar] [CrossRef]
- Sun, L.; Zheng, Z.; He, T.; Li, F. Multifloor Wi-Fi Localization System with Floor Identification. Int. J. Distrib. Sens. Netw. 2015, 11, 131523. [Google Scholar] [CrossRef] [Green Version]
- Haque, F.; Dehghanian, V.; Fapojuwo, A.O.; Nielsen, J. A Sensor Fusion-Based Framework for Floor Localization. IEEE Sens. J. 2018, 19, 623–631. [Google Scholar] [CrossRef]
- Garcia, G.; Nahapetian, A. Wearable computing for image-based indoor navigation of the visually impaired. In Proceedings of the Conference on Wireless Health, Bethesda, MY, USA, 14–16 October 2015; ACM: New York, NY, USA, 2015; p. 17. [Google Scholar] [CrossRef] [Green Version]
- Ruan, C.; Yu, M.; He, X.; Song, B. An Indoor Floor Positioning Method Based on Smartphone’s Barometer. In Proceedings of the 2018 Ubiquitous Positioning, Navigation and Location Based Services, Wuhan, China, 22–23 March 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Delahoz, Y.; Labrador, M.A. A real-time smartphone-based floor detection system for the visually impaired. In Proceedings of the 2017 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Rochester, MN, USA, 8–10 May 2017; pp. 27–32. [Google Scholar]
- Saguna, S.; Zaslavsky, A.; Chakraborty, D. Complex activity recognition using context-driven activity theory and activity signatures. ACM Trans. Comput. Interact. 2013, 20, 1–34. [Google Scholar] [CrossRef]
- Thakur, N.; Han, C.Y. Towards a Knowledge Base for Activity Recognition of Diverse Users. In Human Interaction, Emerging Technologies and Future Applications III; Springer International Publishing: Cham, Switzerland, 2020; pp. 303–308. [Google Scholar] [CrossRef]
- Biggs, N. The roots of combinatorics. Hist. Math. 1979, 6, 109–136. [Google Scholar] [CrossRef] [Green Version]
- Thakur, N. Framework for a Context Aware Adaptive Intelligent Assistant for Activities of Daily Living [Internet]. University of Cincinnati Thesis. 2019. Available online: https://search.proquest.com/openview/a8a1e3b158d0a43068c95d0d8e2ed31d/1?pq-origsite=gscholar&cbl=18750&diss=y (accessed on 1 September 2021).
- Mohammed, M.; Khan, M.B.; Bashier, E.B.M. Machine Learning; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Gusain, K.; Gupta, A.; Popli, B. Transition-Aware Human Activity Recognition Using eXtreme Gradient Boosted Decision Trees. In Advanced Computing and Communication Technologies; Springer: Singapore, 2017; pp. 41–49. [Google Scholar] [CrossRef]
- Scheurer, S.; Tedesco, S.; Brown, K.N.; O’Flynn, B. Human activity recognition for emergency first responders via body-worn inertial sensors. In Proceedings of the 2017 IEEE 14th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Eindoven, The Netherlands, 9–12 May 2017; pp. 5–8. [Google Scholar]
- Subasi, A.; Dammas, D.H.; Alghamdi, R.D.; Makawi, R.A.; Albiety, E.A.; Brahimi, T.; Sarirete, A. Sensor Based Human Activity Recognition Using Adaboost Ensemble Classifier. Procedia Comput. Sci. 2018, 140, 104–111. [Google Scholar] [CrossRef]
- Keally, M.; Zhou, G.; Xing, G.; Wu, J.; Pyles, A. PBN: Towards practical activity recognition using smartphone-based body sensor networks. In Proceedings of the 9th ACM Conference on Embedded Networked Sensor Systems—SenSys ’11, Washington, DC, USA, 1–4 November 2011; ACM Press: New York, NY, USA, 2011. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. Boosting and Additive Trees. In The Elements of Statistical Learning; Springer: New York, NY, USA, 2009; pp. 1–51. [Google Scholar]
- Madeh Piryonesi, S.; El-Diraby, T.E. Using machine learning to examine impact of type of performance indicator on flexible pavement deterioration modeling. J. Infrastruct. Syst. 2021, 27, 04021005. [Google Scholar] [CrossRef]
- Wikipedia Contributors. Gradient Boosting. Wikipedia, the Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/w/index.php?title=Gradient_boosting&oldid=1036319866 (accessed on 1 August 2021).
- Schapire, R.E. Explaining AdaBoost. In Empirical Inference; Springer: Berlin/Heidelberg, Germany, 2013; pp. 37–52. [Google Scholar]
- Wikipedia Contributors. AdaBoost. Available online: https://en.wikipedia.org/w/index.php?title=AdaBoost&oldid=1015653726 (accessed on 5 April 2021).
- Anguita, D.; Ghelardoni, L.; Ghio, A.; Oneto, L.; Ridella, S. The ‘K’ in K-fold Cross Validation. In Proceedings of the 20th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN), Bruges, Belgium, 2–4 October 2012; pp. 441–446. [Google Scholar]
- Wikipedia Contributors. Cross-Validation (Statistics) [Internet]. Wikipedia, the Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/w/index.php?title=Cross-validation_(statistics)&oldid=1033842588 (accessed on 2 August 2021).
- Mierswa, I.; Wurst, M.; Klinkenberg, R.; Scholz, M.; Euler, T. YALE: Rapid prototyping for complex data mining tasks. In Proceedings of the 12th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining—KDD ’06, Philadelphia, PA, USA, 20–23 August 2006; ACM Press: New York, NY, USA, 2006. [Google Scholar]
- Hofmann, M.; Klinkenberg, R. Rapidminer: Data Mining Use Cases and Business Analytics Applications; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Chakraborty, S.; Han, C.Y.; Zhou, X.; Wee, W.G. A context driven human activity recognition framework. In Proceedings of the 2016 International Conference on Health Informatics and Medical Systems, Monte Carlo Resort, Las Vegas, NV, USA, 25–28 July 2016; pp. 96–102. [Google Scholar]
- Center for Drug Evaluation, Research. (IRBs) and Protection of Human Subjects [Internet]. Fda.gov. 2019. Available online: https://www.fda.gov/about-fda/center-drug-evaluation-and-research-cder/institutional-review-boards-irbs-and-protection-human-subjects-clinical-trials (accessed on 11 January 2021).
- Axelrod, B. Ohio Gov. Mike DeWine Asks Employers to Continue Working Remotely Amid COVID-19. Available online: https://www.wkyc.com/article/news/health/coronavirus/dewine-woking-remotely-covid-19/95-54447569-e757-4eac-bbc3-4bab4652b764 (accessed on 5 April 2021).
- Torres-Sospedra, J.; Montoliu, R.; Martinez-Uso, A.; Avariento, J.P.; Arnau, T.J.; Benedito-Bordonau, M.; Huerta, J. UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems. In Proceedings of the 2014 International Conference on Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 261–270. [Google Scholar] [CrossRef]
- Wikipedia Contributors. Jaume I University. Wikipedia, the Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/w/index.php?title=Jaume_I_University&oldid=102570971 (accessed on 13 December 2020).
- Wikipedia Contributors. Confusion Matrix. Wikipedia, the Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/w/index.php?title=Confusion_matrix&oldid=1031861694 (accessed on 25 July 2021).
- COVID-19 United States Cases by County—Johns Hopkins Coronavirus Resource Center. Available online: https://coronavirus.jhu.edu/us-map (accessed on 13 December 2020).
- IHME COVID-19 Forecasting Team. Modeling COVID-19 scenarios for the United States. Nat. Med. 2021, 27, 94–105. [Google Scholar] [CrossRef]







| Characteristics | Feature Description |
|---|---|
| At1 | Standing (0.08) |
| Ct1 | Lights on (0.08) |
| At2 | Walking towards dining table (0.20) |
| Ct2 | Dining area (0.20) |
| At3 | Serving food on a plate (0.25) |
| Ct3 | Food present (0.25) |
| At4 | Washing hand/using hand sanitizer (0.20) |
| Ct4 | Plate present (0.20) |
| At5 | Sitting down (0.08) |
| Ct5 | Sitting options available (0.08) |
| At6 | Starting to eat (0.19) |
| Ct6 | Food quality and taste (0.19) |
| Ats | {At1, At2} |
| Cts | {Ct1, Ct2} |
| AtE | {At5, At6} |
| CtE | {Ct5, Ct6} |
| Atδ | {At2, At3, At4} |
| Ctδ | {Ct2, Ct3, Ct4} |
| AtI | {At1, At2, At3, At4, At5, At6} |
| CtI | {Ct1, Ct2, Ct3, Ct4, Ct5, Ct6} |
| η | 6 |
| μ | 6 |
| ϱ | 4 |
| ω | 4 |
| ζ(t) | 64 |
| Θ(t) | 4 |
| Ψ(t) | 60 |
| Attribute Name | Description |
|---|---|
| WAP001 | Intensity of Signal obtained from WAP #001 |
| WAP002 | Intensity of Signal obtained from WAP #002 |
| WAP003 | Intensity of Signal obtained from WAP #003 |
| WAP004 | Intensity of Signal obtained from WAP #004 |
| ⋮ | ⋮ |
| WAP520 | The intensity of Signal obtained from WAP #520 |
| Longitude | The longitude of the user’s indoor position |
| Latitude | The latitude of the user’s indoor position |
| Floor | The specific floor number where the user was located |
| Building | The specific building number where the user was located |
| Space ID | The identifier representing a specific spatial region |
| RelativePosition | States whether the user was inside or outside a specific spatial region |
| User ID | A unique identifier to identify each user |
| Phone ID | The identifier representing the specific phone that was carried by the user |
| Timestamp | The timestamp information associated with the user’s location |
| User | Overall Accuracy | CP Floor 0 | CR Floor 0 | CP Floor 1 | CR Floor 1 | CP Floor 2 | CR Floor 2 | CP Floor 3 | CR F Floor 3 | CP Floor 4 | CR Floor 4 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Average User | 89.16% | 89.71% | 94.94% | 94.89% | 89.02% | 84.06% | 78.58% | 85.40% | 91.18% | 99.91% | 99.91% |
| User 1 | 95.69% | 99.05% | 98.48% | 98.53% | 97.49% | 98.18% | 88.54% | 94.56% | 99.03% | 0.00% | 0.00% |
| User 2 | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% | 100.00% | 100.00% | 100.00% | 100.00% | 0.00% | 0.00% |
| User 3 | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 100.00% | 100.00% |
| User 4 | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% | 100.00% | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% |
| User 5 | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% | 100.00% | 100.00% | 100.00% | 100.00% | 0.00% | 0.00% |
| User 6 | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 100.00% | 100.00% | 100.00% | 100.00% |
| User 7 | 98.12% | 96.80% | 99.64% | 99.75% | 97.12% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% |
| User 8 | 100.00% | 100.00% | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% | 100.00% | 100.00% | 0.00% | 0.00% |
| User 9 | 99.44% | 100.00% | 100.00% | 0.00% | 0.00% | 98.74% | 99.37% | 98.94% | 97.89% | 0.00% | 0.00% |
| User 10 | 100.00% | 100.00% | 100.00% | 0.00% | 0.00% | 100.00% | 100.00% | 100.00% | 100.00% | 0.00% | 0.00% |
| User 11 | 94.13% | 92.60% | 97.16% | 97.96% | 89.87% | 96.90% | 93.98% | 96.79% | 96.26% | 0.00% | 0.00% |
| User 12 | 100.00% | 0.00% | 0.00% | 100.00% | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% |
| User 13 | 100.00% | 100.00% | 100.00% | 100.00% | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% | 100.00% | 100.00% |
| User 14 | 99.37% | 97.84% | 98.55% | 99.35% | 99.03% | 100.00% | 99.34% | 99.45% | 99.81% | 0.00% | 0.00% |
| User 15 | 100.00% | 0.00% | 0.00% | 100.00% | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% |
| User 16 | 98.06% | 98.71% | 97.03% | 97.54% | 98.93% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% |
| User 17 | 100.00% | 100.00% | 100.00% | 0.00% | 0.00% | 0.00% | 0.00% | 100.00% | 100.00% | 0.00% | 0.00% |
| User 18 | 100.00% | 0.00% | 0.00% | 100.00% | 100.00% | 0.00% | 0.00% | 100.00% | 100.00% | 0.00% | 0.00% |
| User | Overall Accuracy | CP Inside | CR Inside | CP Outside | CR Outside |
|---|---|---|---|---|---|
| Average User | 77.17% | 40.05% | 73.96% | 93.71% | 77.81% |
| User 1 | 100.00% | 0.00% | 0.00% | 100.00% | 100.00% |
| User 2 | 91.29% | 80.66% | 76.00% | 93.86% | 95.27% |
| User 3 | 100.00% | 0.00% | 0.00% | 100.00% | 100.00% |
| User 4 | 96.51% | 98.46% | 92.09% | 95.49% | 99.15% |
| User 5 | 99.51% | 100.00% | 82.35% | 99.50% | 100.00% |
| User 6 | 99.69% | 100.00% | 90.00% | 99.69% | 100.00% |
| User 7 | 88.14% | 78.48% | 98.07% | 98.36% | 81.20% |
| User 8 | 94.29% | 87.70% | 88.43% | 96.36% | 96.11% |
| User 9 | 96.71% | 98.12% | 83.07% | 96.47% | 99.66% |
| User 10 | 95.72% | 93.98% | 90.70% | 96.39% | 97.71% |
| User 11 | 95.59% | 90.50% | 81.88% | 96.49% | 98.30% |
| User 12 | 96.56% | 94.12% | 96.00% | 97.89% | 96.86% |
| User 13 | 100.00% | 100.00% | 100.00% | 100.00% | 100.00% |
| User 14 | 99.00% | 99.44% | 92.19% | 98.94% | 99.93% |
| User 15 | 92.58% | 93.23% | 81.58% | 92.33% | 97.40% |
| User 16 | 96.32% | 98.29% | 83.09% | 95.92% | 99.64% |
| User 17 | 94.47% | 87.98% | 94.47% | 97.56% | 94.48% |
| User 18 | 97.05% | 93.51% | 90.00% | 97.80% | 98.61% |
| Work(s) | Accuracy |
|---|---|
| Alsehly et al. [74] | 81.3% |
| Garcia et al. [78] | 81.8% |
| Delahoz et al. [80] | 82.0% |
| Ruan et al. [79] | 85.6% |
| Campos et al. [75] | 90.6% |
| Sun et al. [76] | 93.7% |
| Haque et al. [77] | 93.8% |
| Thakur et al. [this work] | 100.0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thakur, N.; Han, C.Y. Indoor Localization for Personalized Ambient Assisted Living of Multiple Users in Multi-Floor Smart Environments. Big Data Cogn. Comput. 2021, 5, 42. https://doi.org/10.3390/bdcc5030042
Thakur N, Han CY. Indoor Localization for Personalized Ambient Assisted Living of Multiple Users in Multi-Floor Smart Environments. Big Data and Cognitive Computing. 2021; 5(3):42. https://doi.org/10.3390/bdcc5030042
Chicago/Turabian StyleThakur, Nirmalya, and Chia Y. Han. 2021. "Indoor Localization for Personalized Ambient Assisted Living of Multiple Users in Multi-Floor Smart Environments" Big Data and Cognitive Computing 5, no. 3: 42. https://doi.org/10.3390/bdcc5030042
APA StyleThakur, N., & Han, C. Y. (2021). Indoor Localization for Personalized Ambient Assisted Living of Multiple Users in Multi-Floor Smart Environments. Big Data and Cognitive Computing, 5(3), 42. https://doi.org/10.3390/bdcc5030042