

Botnet Detection Employing a Dilated Convolutional Autoencoder Classifier with the Aid of Hybrid Shark and Bear Smell Optimization Algorithm-Based Feature Selection in FANETs
 , ,
, ,  , , ,
, , ,  , ,
, ,
Abstract
1. Introduction
- A new technique is proposed that utilizes the hybrid shark and bear smell optimization algorithm (HSBSOA) for FS and the deep neural classifiers to enhance the efficient and precise BN identification approach in FANETs;
- The aim of this study remains in identifying and classifying the implementation-specified threats, such as scan attacks, DDoS, TCP, UDP, and sync flooding, which are a few of the typical attacks.
2. Related Works
3. Proposed HSBSOpt_DCA
3.1. Dataset Description
- Scan commands for finding the defenseless IoTD;
- ACK, SYN, UDP, and TCP flooding;
- Combo or combination attacks employed to open a link and transmit the spam into this.
3.2. Pre-Processing Employing OhE
3.3. FS Employing HSBSOA
3.4. Initialization Procedure
3.5. Odor Absorption (OA)
3.6. Frontward Motion (FtM) toward the Target
| Pseudocode for frontward motion begins Calculate velocity V Update the position of target prey Velocity of each shark () Find maximal quantity for forward motion Release the odor and find its intensity Update the shark’s novel location End |
3.7. Rotatory Motion (RM)
3.8. Updating the Particle Location
3.9. Attaining GS and LS
| Pseudocode: HSBSOA Algorithm Begin: Initialize search space Indicate the total number of populations Compute the optimization issue Compute decision variables numeral Compute local solution (LS) from decision variable Update the inhale and exhale parameter Update exhalation time (ET), inhalation time (IT) Initiate Odor absorption Compute non-negative array Compute granular and mitral (G-M) layers Initiate Frontward motionCompute velocity V for each shark Update for all location Find shark’s acceleration Initiate Rotatory motion Compute local search (LcS) Updating the particle location Compute probability odor components Compute probability odor fitness (POF) Find the fitness parameter End |
3.10. Classification Employing DCAE
| Pseudocode: Proposed Approach Begin five classes = CC categorical feature (CF) = Rm, e Compute average π Compute standard deviation β Find Check the shark’s capability Capture the prey EmploySoS Initiate the smelling process Achieve global solution Find the fitness value Indicate the total number of population Compute the optimization issue Compute decision variable numeral Compute local solution (LS) from decision variable Update the inhale and exhale parameter Update exhalation time (ET), inhalation time (IT) Initiate Odor absorption Compute Compute non-negative array Compute granular and mitral (G-M) layers Calculate velocity V Update the position of target prey Velocity of each shark () Find maximal quantity for forwarding motion Release the odor and find its intensity Update the shark’s novel location Initiate Frontward motion Compute velocity V for each shark Update for all locations Find shark’s acceleration Initiate Rotatory motion Compute local search (LcS) Update the particle location Compute probability odor components Compute probability odor fitness (POF) Find the fitness parameter Stop |
4. Performance Analysis
4.1. Performance Matrices
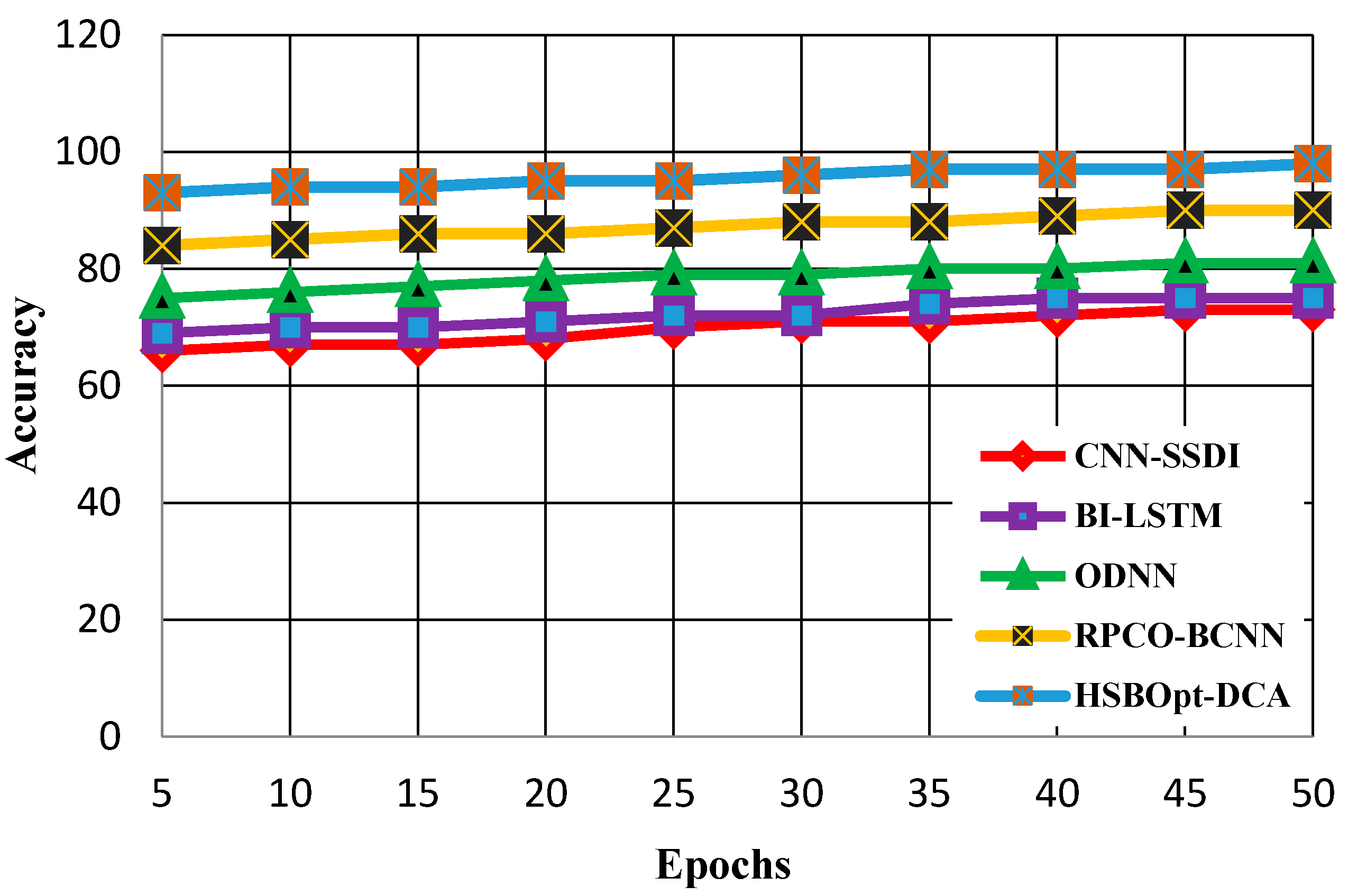
- Accuracy: This provides the capability for comprehensive anticipation generated by the paradigm. The true positive (TP) and true negative (TN) give the ability to anticipate the intrusion’s existence or non-existence. The false positive (FP) and false negative (FN) provide the false anticipation given by the employed paradigm. The mathematical expression for the calculation of the accuracy is described as [15]:
- Precision: Precision is defined as the positive output achieved by the algorithm used in the proposed model, which lies in the range of (0 to 1). It computes the intrusion classification paradigm’s victory. It defines the classifier’s probability for anticipating the outcome as positive if the intrusion exists. It is as called the TP rate. It can be measured as:
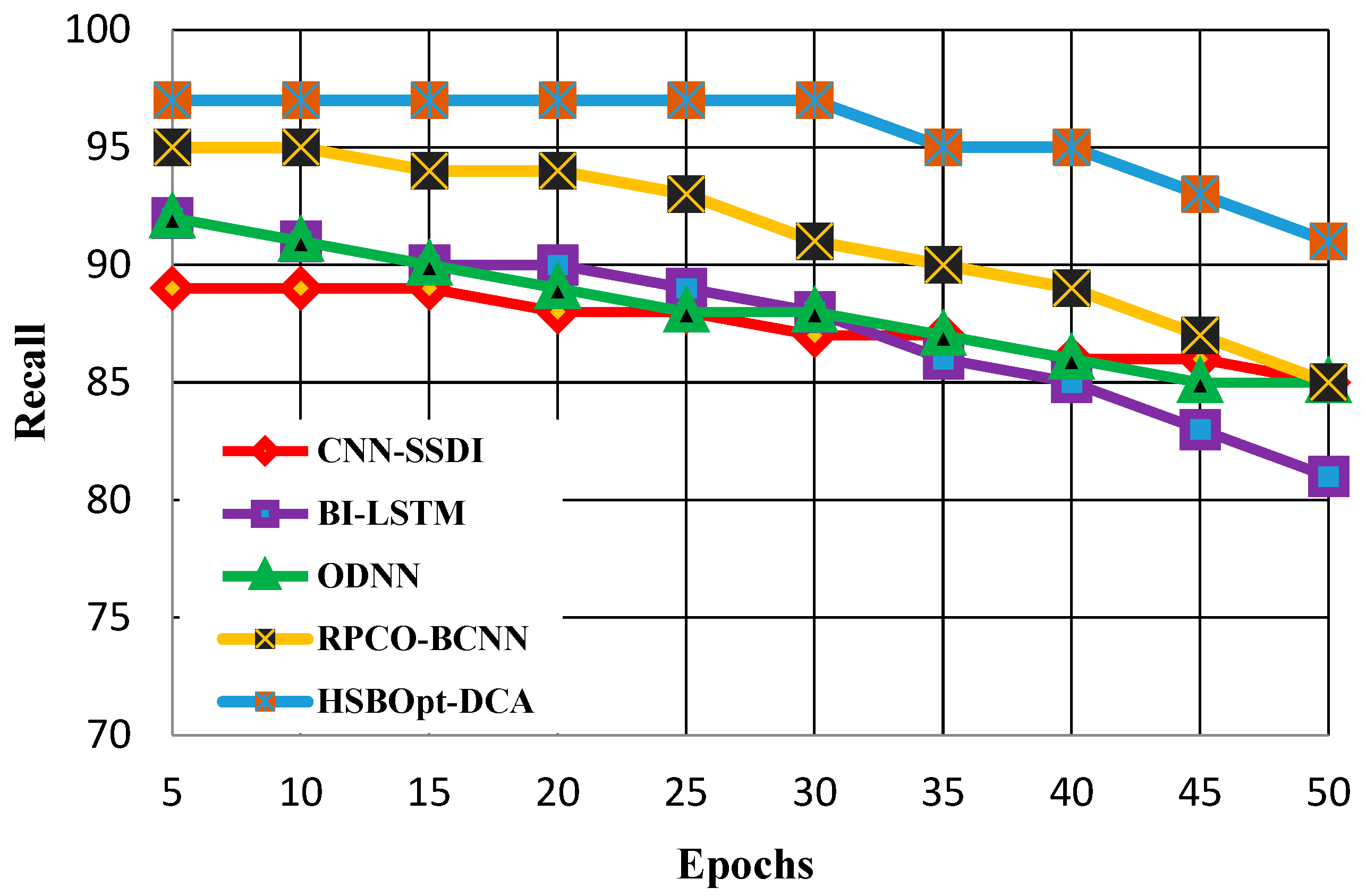
- Recall: This is the classifier’s probability of anticipating the outcome as negative if the intrusion does not exist. It is also known as the TN rate, as mentioned below:
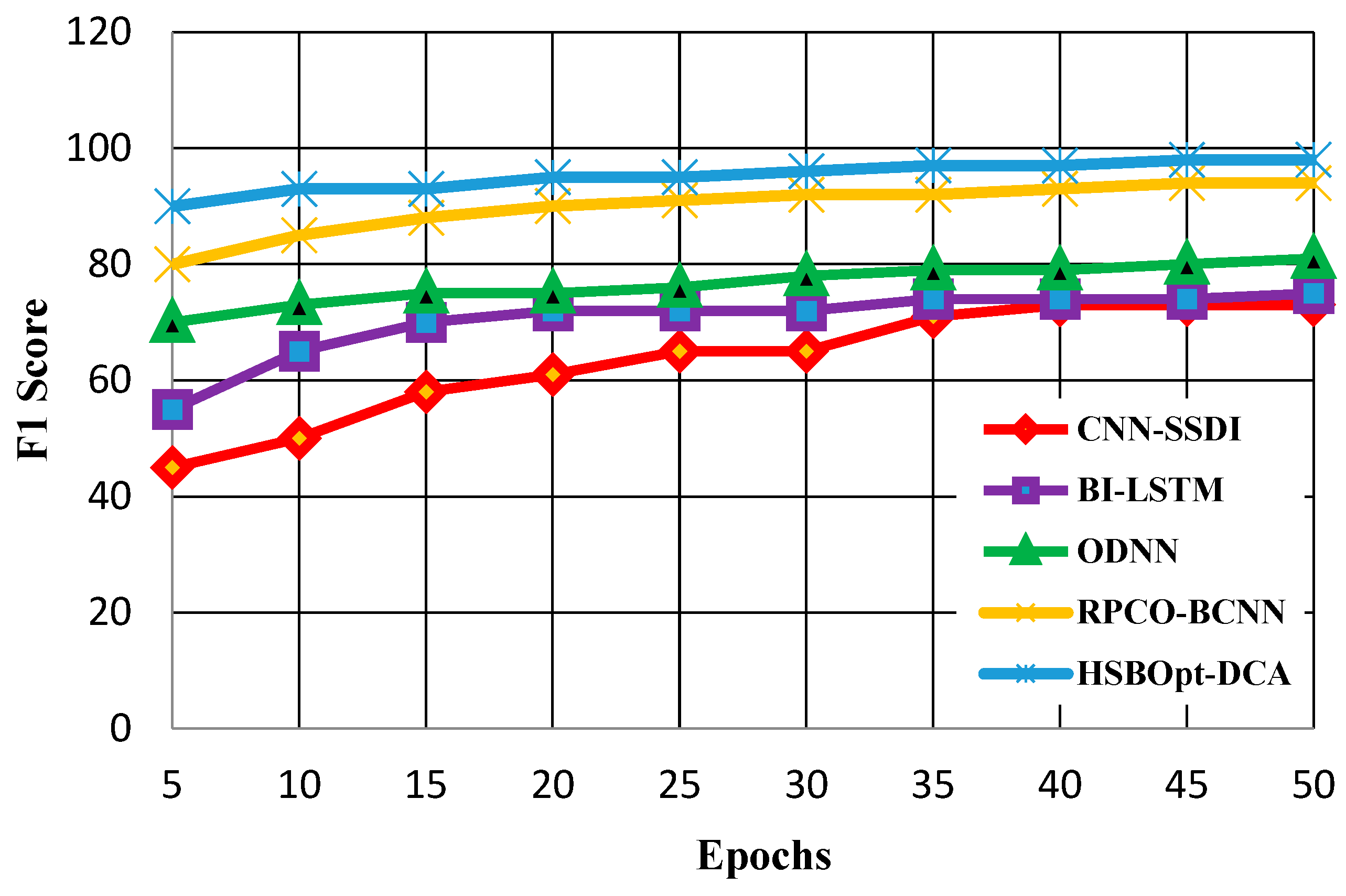
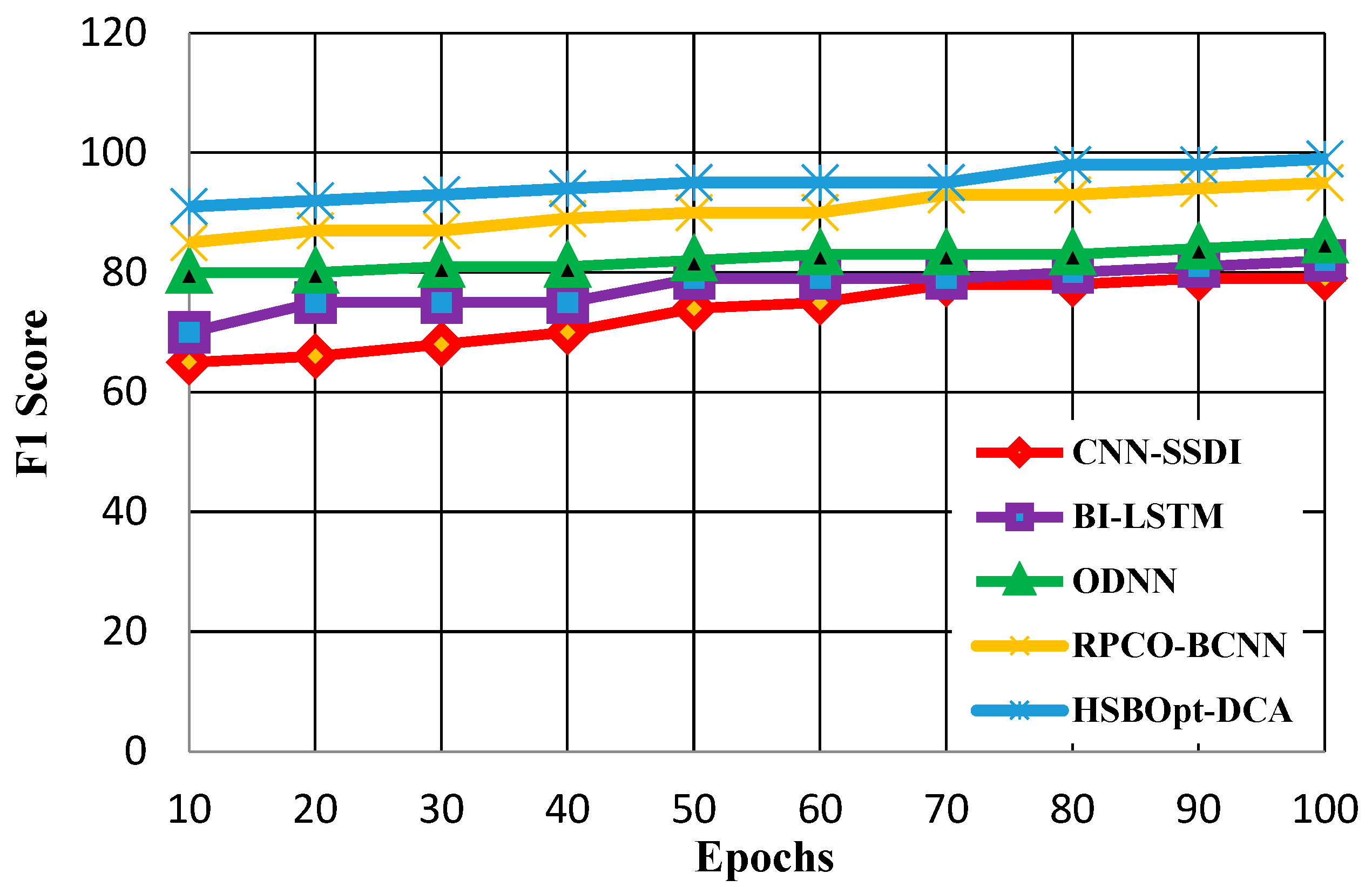
- F1-Score: This is used to measure the anticipation execution. It is defined as the weighted mean calculation of the precision and recall. The F1-score lies between 0 and 1. If the score is 1, it is considered the most acceptable value; if it is 0, it is regarded as weak. The mathematical expression for the calculation of the F1-score [15] is given below:
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gupta, S.; Sharma, N.; Rathi, R.; Gupta, D. Dual Detection Procedure to Secure Flying Ad Hoc Networks: A Trust-Based Framework; Springer: Singapore, 2021; Volume 210, pp. 83–95. [Google Scholar] [CrossRef]
- Jasim, K.S.; Alheeti, K.M.A.; Alaloosy, A.K.A.N. A Review Paper on Secure Communications in FANET. In Proceedings of the 2021 International Conference of Modern Trends in Information and Communication Technology Industry (MTICTI), Sana’a, Yemen, 4–6 December 2021; 146, pp. 1–7. [Google Scholar] [CrossRef]
- Bekmezci, İ.; Şentürk, E.; Türker, T. Security issues in flying ad-hoc networks (FANETS). J. Aeronaut. Space Technol. 2016, 9, 13–21. [Google Scholar]
- Dadi, S.; Abid, M. Enhanced Intrusion Detection System Based on AutoEncoder Network and Support Vector Machine; Springer: Singapore, 2021; Volume 466, pp. 327–341. [Google Scholar] [CrossRef]
- Rodrigues, M.; Pigatto, F.D.; Fontes, J.V.C.; Pinto, A.S.R.; Diguet, J.-P.; Branco, C.K. UAV Integration IntoIoIT: Opportunities and Challenges. In Proceedings of the 13th International Conference on Autonomic and Autonomous Systems (ICAS 2017), Barcelona, Spain, 21–25 May 2017; p. 95. [Google Scholar]
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Sang, Q.; Wu, H.; Xing, L.; Xie, P. Review and Comparison of Emerging Routing Protocols in Flying Ad Hoc Networks. Symmetry 2020, 12, 971. [Google Scholar] [CrossRef]
- Hussain, A. A Hybrid and Robust Delay and Link Stability Aware (DLSA) Routing Protocol for Unmanned Aerial Ad-Hoc Networks (UAANETs). Res. Sq. 2021; Preprint (Version 1). [Google Scholar] [CrossRef]
- Zafar, W.; Khan, B.M. A reliable, delay bounded and less complex communication protocol for multicluster FANETs. Digit. Commun. Netw. 2017, 3, 30–38. [Google Scholar] [CrossRef]
- Walia, E.; Bhatia, V.; Kaur, G. Detection Of Malicious Nodes in Flying Ad-HOC Networks (FANET). Int. J. Electron. Commun. Eng. 2018, 5, 6–12. [Google Scholar] [CrossRef]
- Yanmaz, E.; Costanzo, C.; Bettstetter, C.; Elmenreich, W. A discrete stochastic process for coverage analysis of autonomous UAV networks. In Proceedings of the 2010 IEEE Globecom Workshops, Miami, FL, USA, 6–10 December 2010; 40, pp. 1777–1782. [Google Scholar] [CrossRef]
- Ahamed S, M.J.; Krishnamoorthy, J. Cyber threats based on botnet and its detection mechanisms. In Proceedings of the 8th Annual International Research Conference, Oluvil, Sri Lanka, 25 November 2019. [Google Scholar]
- Verma, S.; Sharma, N.; Singh, A.; Alharbi, A.; Alosaimi, W.; Alyami, H.; Gupta, D.; Goyal, N. DNNBoT: Deep Neural Network-Based Botnet Detection and Classification. Comput. Mater. Contin. 2022, 71, 1729–1750. [Google Scholar] [CrossRef]
- Fried, A.; Last, M. Facing airborne attacks on ADS-B data with autoencoders. Comput. Secur. 2021, 109, 102405. [Google Scholar] [CrossRef]
- Mall, P.; Amin, R.; Obaidat, M.S.; Hsiao, K.-F. CoMSeC++: PUF-based secured light-weight mutual authentication protocol for Drone-enabled WSN. Comput. Netw. 2021, 199, 108476. [Google Scholar] [CrossRef]
- Mairaj, A.; Javaid, A.Y. Game theoretic solution for an Unmanned Aerial Vehicle network host under DDoS attack. Comput. Netw. 2022, 211, 108962. [Google Scholar] [CrossRef]
- Popoola, S.I.; Ande, R.; Adebisi, B.; Gui, G.; Hammoudeh, M.; Jogunola, O. Federated Deep Learning for Zero-Day Botnet Attack Detection in IoT-Edge Devices. IEEE Internet Things J. 2021, 9, 3930–3944. [Google Scholar] [CrossRef]
- Hatzivasilis, G.; Soultatos, O.; Chatziadam, P.; Fysarakis, K.; Askoxylakis, I.; Ioannidis, S.; Alexandris, G.; Katos, V.; Spanoudakis, G. WARDOG: Awareness Detection Watchdog for Botnet Infection on the Host Device. IEEE Trans. Sustain. Comput. 2019, 6, 4–18. [Google Scholar] [CrossRef]
- Xi, R.; Hou, M.; Fu, M.; Qu, H.; Liu, D. Deep Dilated Convolution on Multimodality Time Series for Human Activity Recognition. In Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Alharbi, A.; Alsubhi, K. Botnet Detection Approach Using Graph-Based Machine Learning. IEEE Access 2021, 9, 99166–99180. [Google Scholar] [CrossRef]
- Sung, Y.; Jang, S.; Jeong, Y.-S.; Park, J.H. Malware classification algorithm using advanced Word2vec-based Bi-LSTM for ground control stations. Comput. Commun. 2020, 153, 342–348. [Google Scholar] [CrossRef]
- Shitharth, S.; Prasad, K.M.; Sangeetha, K.; Kshirsagar, P.R.; Babu, T.S.; Alhelou, H.H. An Enriched RPCO-BCNN Mechanisms for Attack Detection and Classification in SCADA Systems. IEEE Access 2021, 9, 156297–156312. [Google Scholar] [CrossRef]
- Dua, D.; Graff, C. UCI Machine Learning Repository. 2019. Available online: https://archive.ics.uci.edu/ml/datasets/detection_of_IoT_botnet_attacks_N_BaIoT (accessed on 5 June 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Method Name | Outcome | Limitation | Advantage |
|---|---|---|---|---|
| [14] | Recurrent autoencoder classifier | Better classification rate | Quality predictions need large amount of data | Able to manage abundant amounts of data and input variables |
| [15] | Physically Unclonable Function (PUF) | Lower packet delivery ratio | Lots of labelled data are required for classification | Great capacity in predicting models |
| [16] | Quantal response equilibrium (QRE). | More throughput | Computational process is expensive during initialization | More flexible |
| [17] | Federated Averaging Algorithm | Less accuracy | Vanishing gradient problem is there while training network | More efficient |
| [18] | WARDOG | Less speed | Computationally expensive—data splitting is complicated and it maintains unbalanced database | Easy to deploy |
| [19] | Dilated Convolutional Neural Network | High accuracy | Computationally expensive process | Higher classification performance |
| [20] | Graph-based Machine learning for botnet detection | High precision | Accuracy is moderate, needs to be improved | Easy to deploy |
| [21] | Bidirectional LSTM | Less complexity | Takes long time to process large neural network | Appealing attributes of non-linear identification and control |
| [22] | RPCO-BCNN | High accuracy | Computationally expensive process | More flexible |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdulsattar, N.F.; Abedi, F.; Ghanimi, H.M.A.; Kumar, S.; Abbas, A.H.; Abosinnee, A.S.; Alkhayyat, A.; Hassan, M.H.; Abbas, F.H. Botnet Detection Employing a Dilated Convolutional Autoencoder Classifier with the Aid of Hybrid Shark and Bear Smell Optimization Algorithm-Based Feature Selection in FANETs. Big Data Cogn. Comput. 2022, 6, 112. https://doi.org/10.3390/bdcc6040112
Abdulsattar NF, Abedi F, Ghanimi HMA, Kumar S, Abbas AH, Abosinnee AS, Alkhayyat A, Hassan MH, Abbas FH. Botnet Detection Employing a Dilated Convolutional Autoencoder Classifier with the Aid of Hybrid Shark and Bear Smell Optimization Algorithm-Based Feature Selection in FANETs. Big Data and Cognitive Computing. 2022; 6(4):112. https://doi.org/10.3390/bdcc6040112
Chicago/Turabian StyleAbdulsattar, Nejood Faisal, Firas Abedi, Hayder M. A. Ghanimi, Sachin Kumar, Ali Hashim Abbas, Ali S. Abosinnee, Ahmed Alkhayyat, Mustafa Hamid Hassan, and Fatima Hashim Abbas. 2022. "Botnet Detection Employing a Dilated Convolutional Autoencoder Classifier with the Aid of Hybrid Shark and Bear Smell Optimization Algorithm-Based Feature Selection in FANETs" Big Data and Cognitive Computing 6, no. 4: 112. https://doi.org/10.3390/bdcc6040112
APA StyleAbdulsattar, N. F., Abedi, F., Ghanimi, H. M. A., Kumar, S., Abbas, A. H., Abosinnee, A. S., Alkhayyat, A., Hassan, M. H., & Abbas, F. H. (2022). Botnet Detection Employing a Dilated Convolutional Autoencoder Classifier with the Aid of Hybrid Shark and Bear Smell Optimization Algorithm-Based Feature Selection in FANETs. Big Data and Cognitive Computing, 6(4), 112. https://doi.org/10.3390/bdcc6040112