Thermal Imaging of Beach-Nesting Bird Habitat with Unmanned Aerial Vehicles: Considerations for Reducing Disturbance and Enhanced Image Accuracy

 ,
,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Mission Planning Considerations
2.3. Imagery Collection and Accuracy Assessment
2.4. Disturbance Measurements
2.5. RGB and Thermal Imagery Processing
3. Results and Discussion
3.1. Observed Bird Colony Responses to UAV Flights
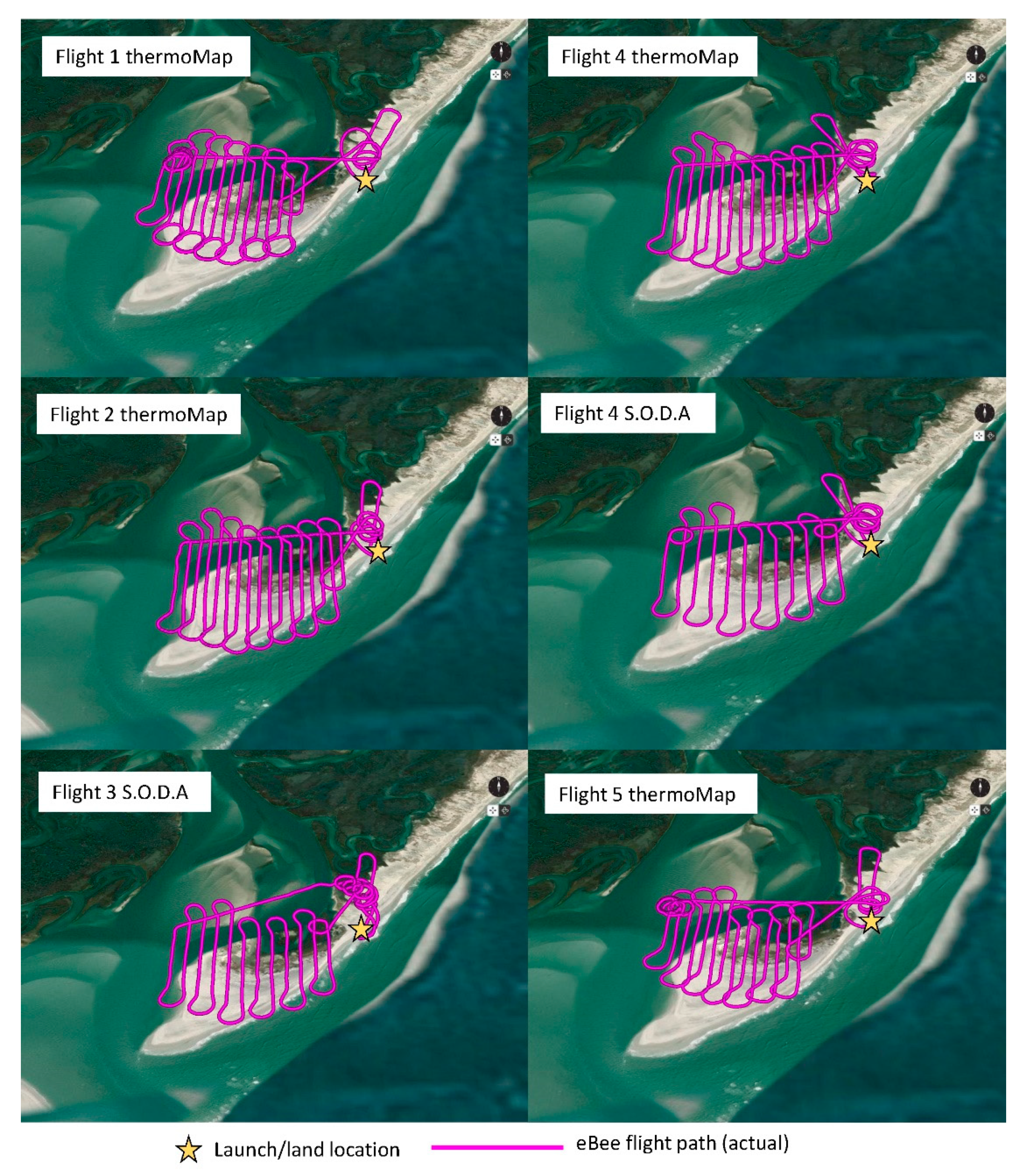
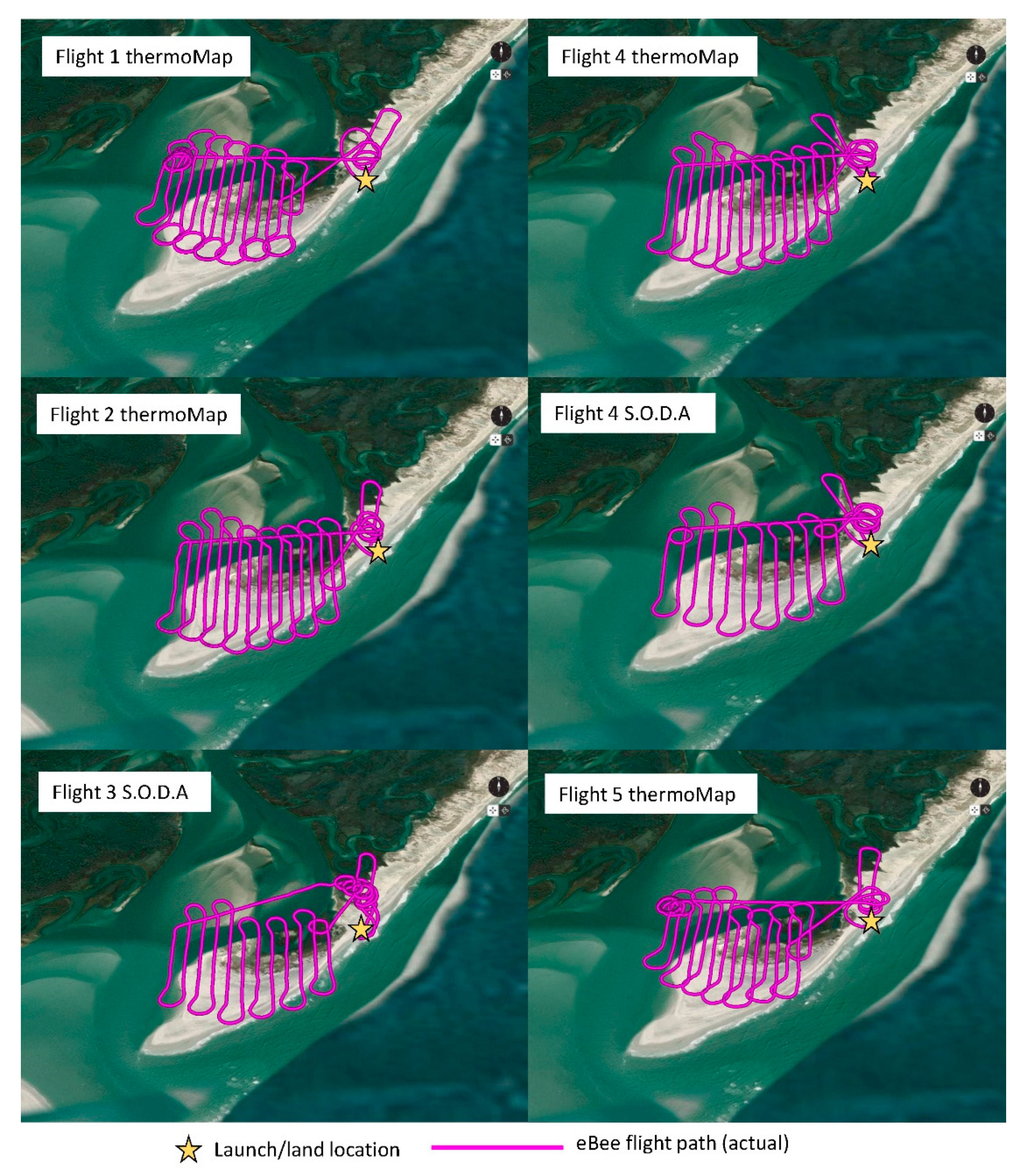
3.1.1. Flight 1
3.1.2. Flight 2
3.1.3. Flights 3–5
3.2. Discussion of Bird Behavioral Response
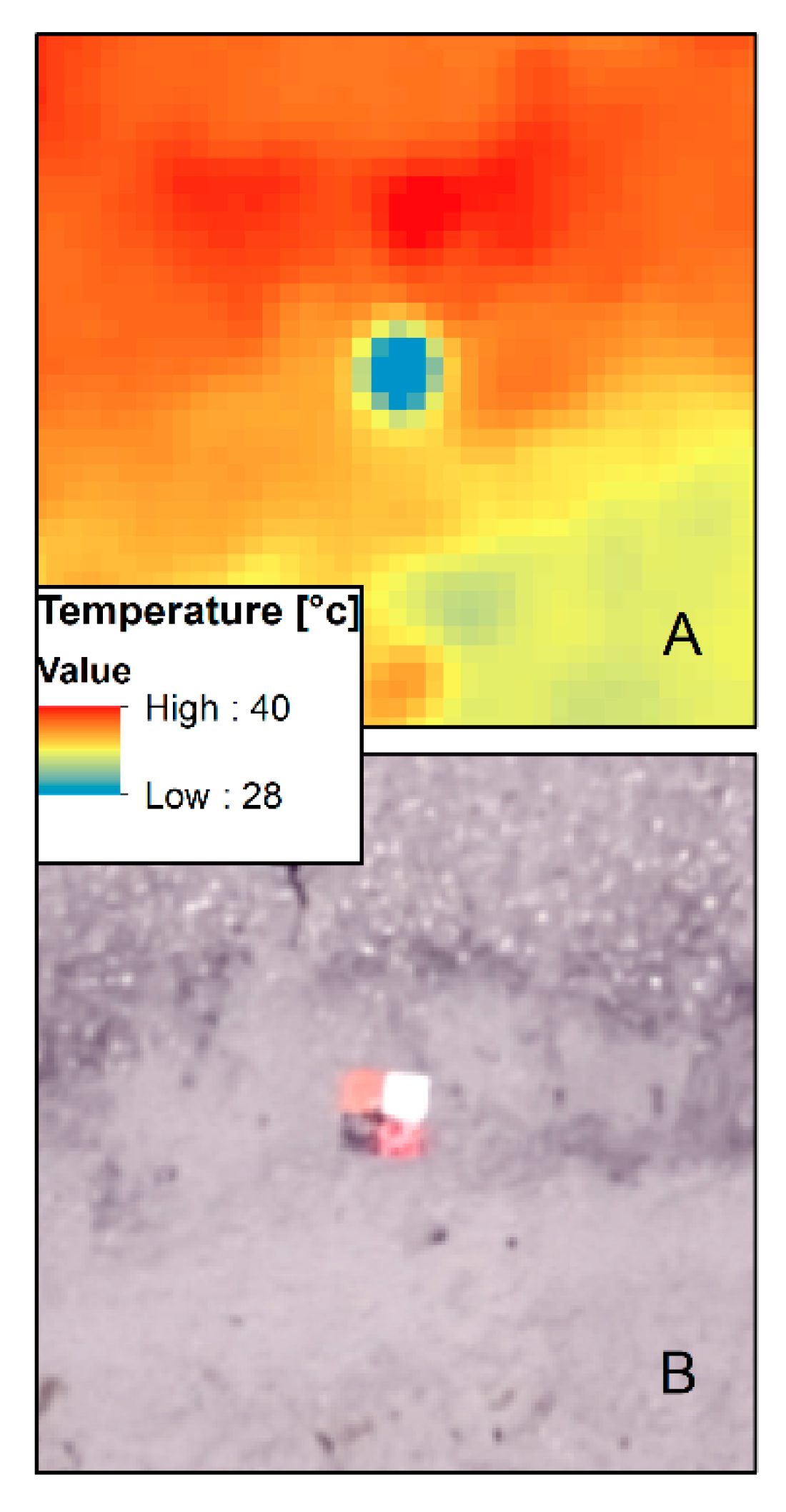
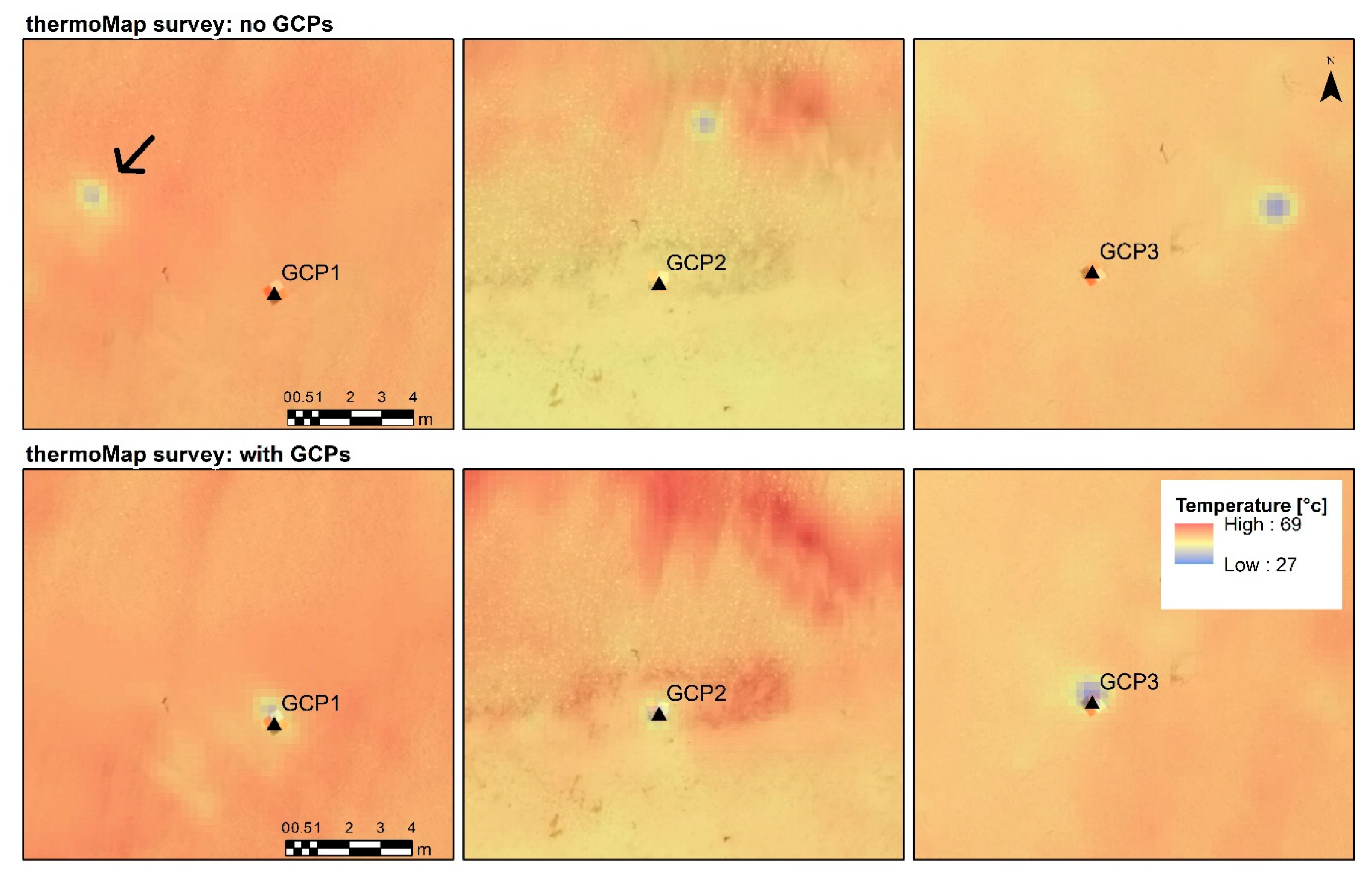
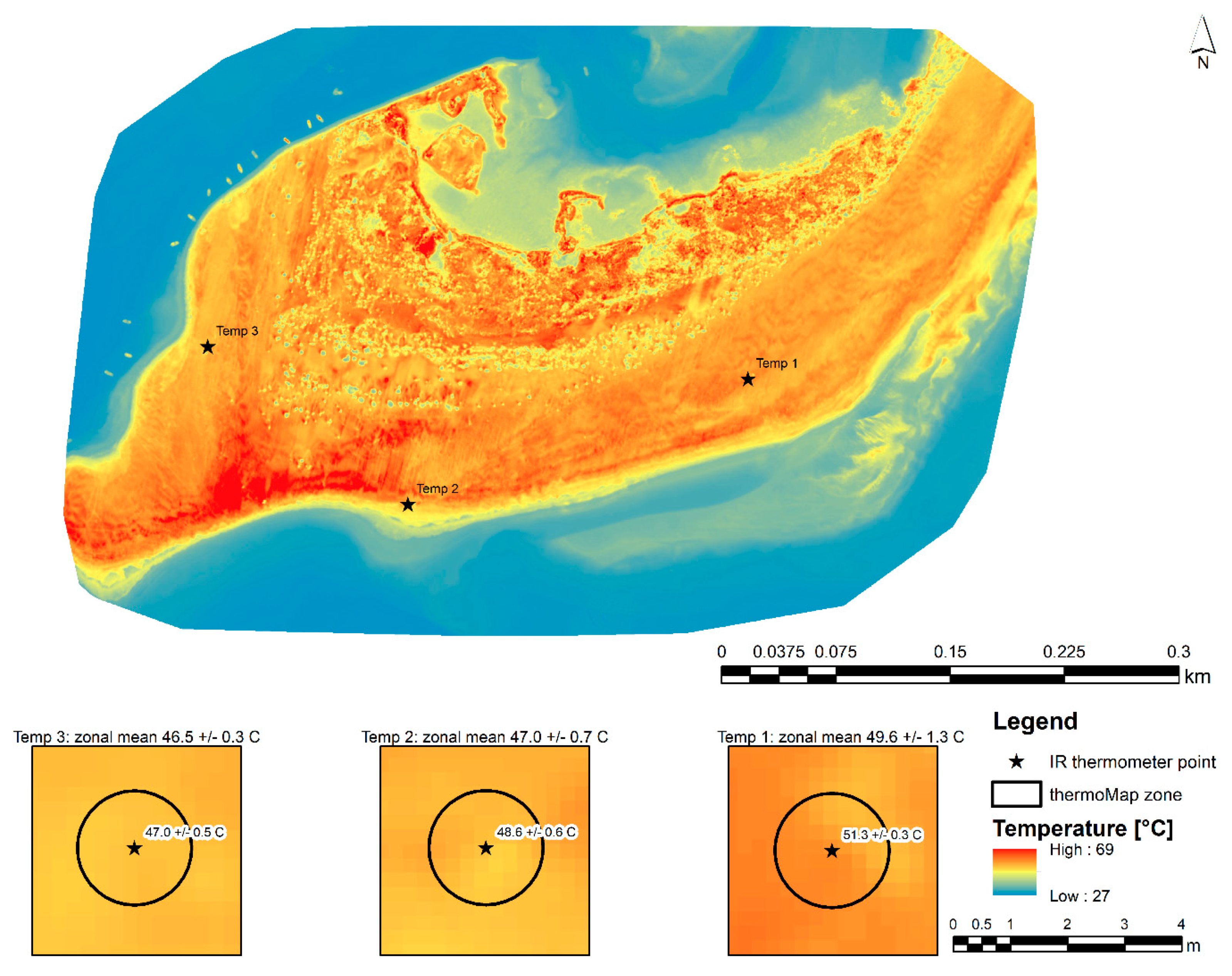
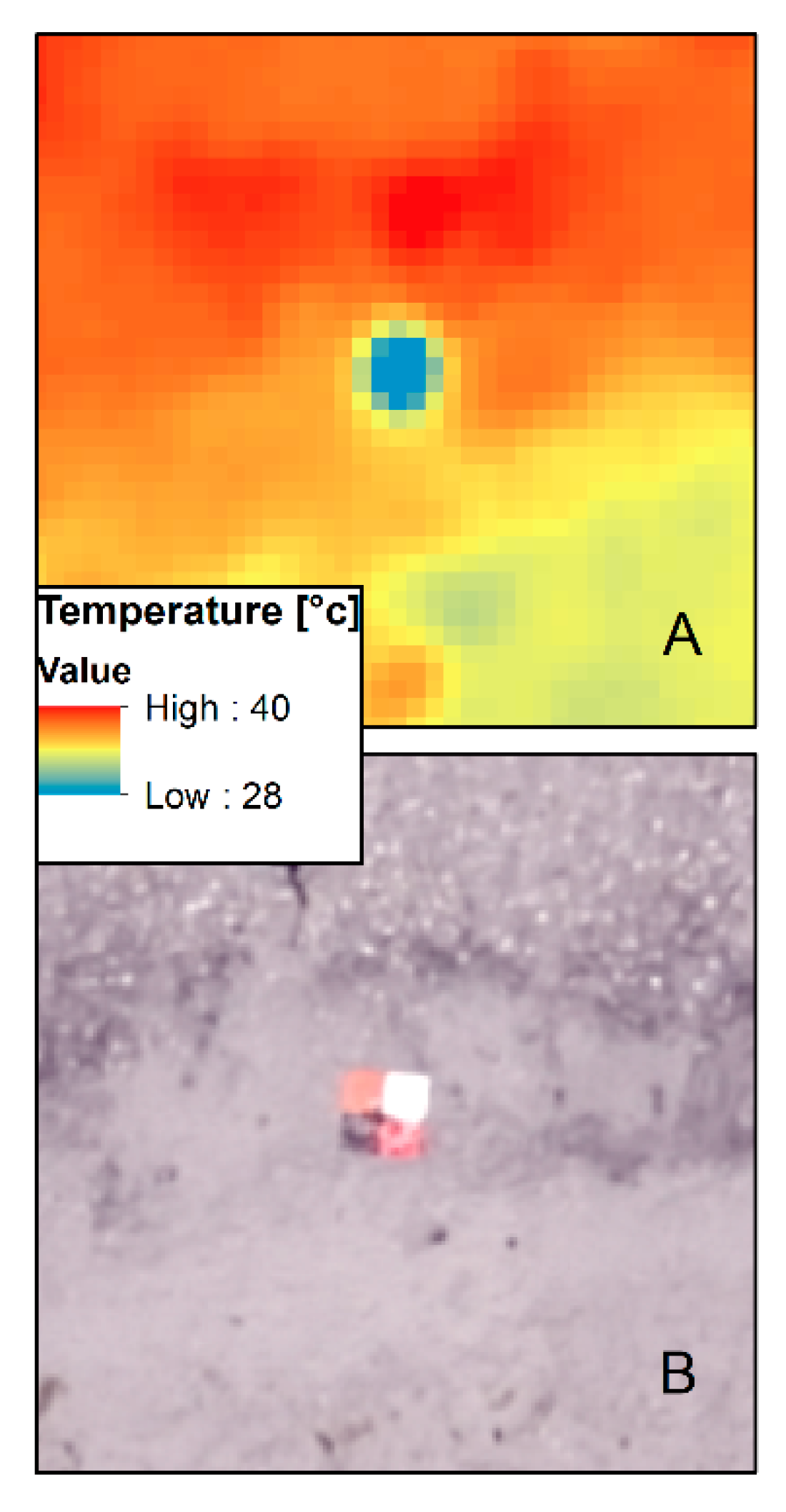
3.3. Spatial and Temperature Accuracy Assessment for Thermal Imagery
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, O.S.; Shemrock, A.; Chabot, D.; Dillon, C.; Williams, G.; Wasson, R.; Franklin, S.E. Hierarchical land cover and vegetation classification using multispectral data acquired from an unmanned aerial vehicle. Int. J. Remote Sens. 2017, 38, 2037–2052. [Google Scholar] [CrossRef]
- Peter, K.D.; d’Oleire-Oltmanns, S.; Ries, J.B.; Marzolff, I.; Ait Hssaine, A. Soil erosion in gully catchments affected by land-levelling measures in the Souss Basin, Morocco, analysed by rainfall simulation and UAV remote sensing data. CATENA 2014, 113, 24–40. [Google Scholar] [CrossRef]
- Samiappan, S.; Turnage, G.; Hathcoch, L.A.; Morehead, R. Mapping of invasive phragmites (common reed) in Gulf of Mexico coastal wetlands using multispectral imagery and small unmanned aerial systems. Int. J. Remote Sens. 2017, 38, 2861–2882. [Google Scholar] [CrossRef]
- Jones, G.P.; Pearlstine, L.G.; Percival, H.F. An assessment of small unmanned eerial vehicles for wildlife research. Wildl. Soc. Bull. 2006, 34, 750–758. [Google Scholar] [CrossRef]
- Clarke, L.J.; Hill, R.A.; Ford, A.; Herbert, R.J.H.; Esteves, L.S.; Stillman, R.A. Using remote sensing to quantify fishing effort and predict shorebird conflicts in an intertidal fishery. Ecol. Inform. 2019, 50, 136–148. [Google Scholar] [CrossRef]
- Sardà-Palomera, F.; Bota, G.; Padilla, N.; Brotons, L.; Sardà, F. Unmanned aircraft systems to unravel spatial and temporal factors affecting dynamics of colony formation and nesting success in birds. J. Avian Biol. 2017, 48, 1273–1280. [Google Scholar] [CrossRef]
- Barr, J.R.; Green, M.C.; DeMaso, S.J.; Hardy, T.B. Detectability and visibility biases associated with using a consumer-grade unmanned aircraft to survey nesting colonial waterbirds. J. Field Ornithol. 2018, 89, 242–257. [Google Scholar] [CrossRef]
- Drever, M.C.; Chabot, D.; O’Hara, P.D.; Thomas, J.D.; Breault, A.; Millikin, R.L. Evaluation of an unmanned rotorcraft to monitor wintering waterbirds and coastal habitats in British Columbia, Canada. J. Unmanned Veh. Syst. 2015, 3, 256–267. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Mott, R.; Baylis, S.M.; Pham, T.T.; Wotherspoon, S.; Kilpatrick, A.D.; Raja Segaran, R.; Reid, I.; Terauds, A.; Koh, L.P. Drones count wildlife more accurately and precisely than humans. Methods Ecol. Evol. 2018, 9, 1160–1167. [Google Scholar] [CrossRef] [Green Version]
- Lyons, M.B.; Brandis, K.J.; Murray, N.J.; Wilshire, J.H.; McCann, J.A.; Kingsford, R.T.; Callaghan, C.T. Monitoring large and complex wildlife aggregations with drones. Methods Ecol. Evol. 2019, 10, 1024–1035. [Google Scholar] [CrossRef] [Green Version]
- McClelland, G.T.W.; Bond, A.L.; Sardana, A.; Glass, T. Rapid population estimate of a surface-nesting seabird on a remote island using a low-cost unmanned aerial-vehicle. Mar. Ornithol. 2016, 44, 215–220. [Google Scholar]
- Rush, G.P.; Clarke, L.E.; Stone, M.; Wood, M.J. Can drones count gulls? Minimal disturbance and semiautomated image processing with an unmanned aerial vehicle for colony-nesting seabirds. Ecol. Evol. 2018, 8, 12322–12334. [Google Scholar] [CrossRef]
- Valle, R.G.; Scarton, F. Effectiveness, efficiency, and safety of censusing Eurasian Oysteratchers Haematopus ostralegus by unmanned aircraft. Mar. Ornithol. 2019, 47, 81–87. [Google Scholar]
- Afán, I.; Máñez, M.; Díaz-Delgado, R. Drone Monitoring of Breeding Waterbird Populations: The Case of the Glossy Ibis. Drones 2018, 2, 42. [Google Scholar] [CrossRef] [Green Version]
- Kamm, M.; Reed, J.M. Use of visible spectrum sUAS photography for land cover classification at nest sites of a declining bird species (Falco sparverius). Remote Sens. Ecol. Conserv. 2019, 5, 259–271. [Google Scholar] [CrossRef]
- Tattoni, C.; Rizzolli, F.; Pedrini, P. Can LiDAR data improve bird habitat suitability models? Ecol. Model. 2012, 245, 103–110. [Google Scholar] [CrossRef]
- Reintsma, K.M.; McGowan, P.C.; Callahan, C.; Collier, T.; Gray, D.; Sullivan, J.D.; Prosser, D.J. Preliminary evaluation of behavioral response of nesting waterbirds to small unmanned aircraft flight. Waterbirds 2018, 41, 326–331. [Google Scholar] [CrossRef]
- Weissensteiner, M.H.; Poelstra, J.W.; Wolf, J.B.W. Low-budget ready-to-fly unmanned aerial vehicles: An effective tool for evaluating the nesting status of canopy-breeding bird species. J. Avian Biol. 2015, 46, 425–430. [Google Scholar] [CrossRef]
- Borrelle, S.B.; Fletcher, A.T. Will drones reduce investigator disturbance to surface-nesting birds? Ornithology 2017, 45, 89–94. [Google Scholar]
- Christie, K.S.; Gilbert, S.L.; Brown, C.L.; Hatfield, M.; Hanson, L. Unmanned aircraft systems in wildlife research: Current and future applications of a transformative technology. Front. Ecol. Environ. 2016, 14, 241–251. [Google Scholar] [CrossRef]
- Kays, R.; Sheppard, J.; Mclean, K.; Welch, C.; Paunescu, C.; Wang, V.; Kravit, G.; Crofoot, M. Hot monkey, cold reality: Surveying rainforest canopy mammals using drone-mounted thermal infrared sensors. Int. J. Remote Sens. 2019, 40, 407–419. [Google Scholar] [CrossRef]
- Rümmler, M.-C.; Mustafa, O.; Maercker, J.; Peter, H.-U.; Esefeld, J. Sensitivity of Adélie and Gentoo penguins to various flight activities of a micro UAV. Polar Biol. 2018, 41, 2481–2493. [Google Scholar] [CrossRef]
- Scobie, C.A.; Hugenholtz, C.H. Wildlife monitoring with unmanned aerial vehicles: Quantifying distance to auditory detection. Wildl. Soc. Bull. 2016, 40, 781–785. [Google Scholar] [CrossRef]
- Bevan, E.; Whiting, S.; Tucker, T.; Guinea, M.; Raith, A.; Douglas, R. Measuring behavioral responses of sea turtles, saltwater crocodiles, and crested terns to drone disturbance to define ethical operating thresholds. PLoS ONE 2018, 13, e0194460. [Google Scholar] [CrossRef] [PubMed]
- Ramos, E.A.; Maloney, B.; Magnasco, M.O.; Reiss, D. Bottlenose dolphins and antillean manatees respond to small multi-rotor unmanned aerial systems. Front. Mar. Sci. 2018, 5, 316. [Google Scholar] [CrossRef]
- Weimerskirch, H.; Prudor, A.; Schull, Q. Flights of drones over sub-Antarctic seabirds show species- and status-specific behavioural and physiological responses. Polar Biol. 2018, 41, 259–266. [Google Scholar] [CrossRef]
- Barnas, A.; Newman, R.; Felege, C.J.; Corcoran, M.P.; Hervey, S.D.; Stechmann, T.J.; Rockwell, R.F.; Ellis-Felege, S.N. Evaluating behavioral responses of nesting lesser snow geese to unmanned aircraft surveys. Ecol. Evol. 2018, 8, 1328–1338. [Google Scholar] [CrossRef] [Green Version]
- Junda, J.H.; Greene, E.; Zazelenchuk, D.; Bird, D.M. Nest defense behaviour of four raptor species (osprey, bald eagle, ferruginous hawk, and red-tailed hawk) to a novel aerial intruder—A small rotary-winged drone. J. Unmanned Veh. Syst. 2016, 4, 217–227. [Google Scholar] [CrossRef]
- Fettermann, T.; Fiori, L.; Bader, M.; Doshi, A.; Breen, D.; Stockin, K.A.; Bollard, B. Behaviour reactions of bottlenose dolphins (Tursiops truncatus) to multirotor Unmanned Aerial Vehicles (UAVs). Sci. Rep. 2019, 9, 8558. [Google Scholar] [CrossRef] [Green Version]
- Vas, E.; Lescroël, A.; Duriez, O.; Boguszewski, G.; Grémillet, D. Approaching birds with drones: First experiments and ethical guidelines. Biol. Lett. 2015, 11, 20140754. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brisson-Curadeau, É.; Bird, D.; Burke, C.; Fifield, D.A.; Pace, P.; Sherley, R.B.; Elliott, K.H. Seabird species vary in behavioural response to drone census. Sci. Rep. 2017, 7, 17884. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ditmer, M.A.; Werden, L.K.; Tanner, J.C.; Vincent, J.B.; Callahan, P.; Iaizzo, P.A.; Laske, T.G.; Garshelis, D.L. Bears habituate to the repeated exposure of a novel stimulus, unmanned aircraft systems. Conserv. Physiol. 2019, 7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rebolo-Ifrán, N.; Graña Grilli, M.; Lambertucci, S.A. Drones as a threat to wildlife: YouTube complements science in providing evidence about their effect. Environ. Conserv. 2019, 46, 205–210. [Google Scholar] [CrossRef]
- Burger, J. The effect of human activity on birds at a coastal bay. Biol. Conserv. 1981, 21, 231–241. [Google Scholar] [CrossRef]
- Oswald, S.A.; Bearhop, S.; Furness, R.W.; Huntley, B.; Hamer, K.C. Heat stress in a high-latitude seabird: Effects of temperature and food supply on bathing and nest attendance of great skuas Catharacta skua. J. Avian Biol. 2008, 39, 163–169. [Google Scholar] [CrossRef]
- Van de Voorde, S.; Witteveen, M.; Brown, M. Differential reactions to anthropogenic disturbance by two ground-nesting shorebirds. Ostrich 2015, 86, 43–52. [Google Scholar] [CrossRef]
- Tremblay, J.; Ellison, L.N. Effects of human disturbance on breeding of Black-Crowned Night Heron. Auk 1979, 96, 364–369. [Google Scholar]
- Snowden, R.S. Least Tern Nest Thermoregulation in Response to Environmental Temerature and Human Disturbance. Master’s Thesis, University of North Carolina Wilmington, Wilmington, NC, USA, 2018. [Google Scholar]
- McKechnie, A.E.; Wolf, B.O. Climate change increases the likelihood of catastrophic avian mortality events during extreme heat waves. Biol. Lett. 2010, 6, 253–256. [Google Scholar] [CrossRef] [Green Version]
- Albright, T.P.; Mutiibwa, D.; Gerson, A.R.; Smith, E.K.; Talbot, W.A.; O’Neill, J.J.; McKechnie, A.E.; Wolf, B.O. Mapping evaporative water loss in desert passerines reveals an expanding threat of lethal dehydration. Proc. Natl. Acad. Sci. USA 2017, 114, 2283–2288. [Google Scholar] [CrossRef] [Green Version]
- Conradie, S.R.; Woodborne, S.M.; Cunningham, S.J.; McKechnie, A.E. Chronic, sublethal effects of high temperatures will cause severe declines in southern African arid-zone birds during the 21st century. Proc. Natl. Acad. Sci. USA 2019, 116, 14065–14070. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wilsey, C.; Bateman, B.; Taylor, L.; Wu, J.X.; LeBaron, G.; Shepherd, R.; Koseff, C.; Friedman, S.; Stone, R. Survival by Degrees: 389 Bird Species on the Brink; National Audubon Society: New York, NY, USA, 2019. [Google Scholar]
- Amat, J.A.; Masero, J.A. How Kentish plovers, Charadrius alexandrinus, cope with heat stress during incubation. Behav. Ecol. Sociobiol. 2004, 56, 26–33. [Google Scholar] [CrossRef] [Green Version]
- Prakash, A. Thermal remote sensing: Concepts, issues, and applications. Int. Arch. Photogramm. Remote Sens. 2000, 43, 5. [Google Scholar]
- Wakeford, Z.E.; Chmielewska, M.; Hole, M.J.; Howell, J.A.; Jerram, D.A. Combining thermal imaging with photogrammetry of an active volcano using UAV: An example from Stromboli, Italy. Photogramm. Rec. 2019, 34, 445–466. [Google Scholar] [CrossRef]
- Dlesk, A.; Vach, K. Point Cloud Generation of A Building from Close Range Thermal Images. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2019, XLII-5/W2, 29–33. [Google Scholar] [CrossRef] [Green Version]
- Brooke, C.; Clutterbuck, B. Mapping Heterogeneous Buried Archaeological Features Using Multisensor Data from Unmanned Aerial Vehicles. Remote Sens. 2019, 12, 41. [Google Scholar] [CrossRef] [Green Version]
- Hartmann, W.; Tilch, S.; Eisenbeiss, H.; Schindler, K. Determination of the uav position by automatic processing of thermal images. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B6, 111–116. [Google Scholar] [CrossRef] [Green Version]
- Tucci, G.; Parisi, E.; Castelli, G.; Errico, A.; Corongiu, M.; Sona, G.; Viviani, E.; Bresci, E.; Preti, F. Multi-Sensor UAV Application for Thermal Analysis on a Dry-Stone Terraced Vineyard in Rural Tuscany Landscape. ISPRS Int. J. Geo-Inf. 2019, 8, 87. [Google Scholar] [CrossRef] [Green Version]
- Park, S.; Nolan, A.P.; Ryu, D.; Chung, H. Estimation of crop water stress in a nectarine orchard using high-resolution imagery from unmanned aerial vehicle (UAV). In Proceedings of the MODSIM2015, 21st International Congress on Modelling and Simulation, Modelling and Simulation Society of Australia and New Zealand, Gold Coast, Australia, 29 November–4 December 2015. [Google Scholar]
- Sagan, V.; Maimaitijiang, M.; Sidike, P.; Eblimit, K.; Peterson, K.; Hartling, S.; Esposito, F.; Khanal, K.; Newcomb, M.; Pauli, D.; et al. UAV-Based High Resolution Thermal Imaging for Vegetation Monitoring, and Plant Phenotyping Using ICI 8640 P, FLIR Vue Pro R 640, and thermoMap Cameras. Remote Sens. 2019, 11, 330. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.; Huete, A.; Steppe, K. Optimizing the Processing of UAV-Based Thermal Imagery. Remote Sens. 2017, 9, 476. [Google Scholar] [CrossRef] [Green Version]
- Burke, C.; Rashman, M.; Wich, S.; Symons, A.; Theron, C.; Longmore, S. Optimising observing strategies for monitoring animals using drone-mounted thermal infrared cameras. Int. J. Remote Sens. 2019, 40, 439–467. [Google Scholar] [CrossRef] [Green Version]
- Kottek, M.; Grieser, J.; Beck, C.; Rudolf, B.; Rubel, F. World Map of the Köppen-Geiger climate classification updated. Meteorol. Z. 2006, 15, 259–263. [Google Scholar] [CrossRef]
- Thompson, B.C.; Jackson, J.A.; Burger, J.; Hill, L.A.; Kirsch, E.M.; Atwood, J.L. Least Tern (Sternula antillarum), Version 1.0. In Birds of the World; Cornell Lab of Ornithology: Ithaca, NY, USA, 2020. [Google Scholar]
- Federal Aviaiton Administration Advisory Circular 107-2; Federal Aviaiton Administration: Washington, DC, USA, 2016.
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Pricope, N.G.; Mapes, K.L.; Woodward, K.D.; Olsen, S.F.; Baxley, J.B. Multi-Sensor Assessment of the Effects of Varying Processing Parameters on UAS Product Accuracy and Quality. Drones 2019, 3, 63. [Google Scholar] [CrossRef] [Green Version]
- McEvoy, J.F.; Hall, G.P.; McDonald, P.G. Evaluation of unmanned aerial vehicle shape, flight path and camera type for waterfowl surveys: Disturbance effects and species recognition. PeerJ 2016, 4, e1831. [Google Scholar] [CrossRef] [Green Version]
- Bierlich, K.; Johnston, D. Using Unoccupied Aerial Systems (UAS) for Surveying Shorebirds in North Carolina; Marine Conservation Ecology Unoccupied Systems Facility; Duke University: Durham, NC, USA, 2016; p. 23. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight | Sensor | Altitude (m AED) | Estimated GSD (cm/px) | Longitudinal Overlap (%) | Latitudinal Overlap (%) | Estimated Duration (mm:ss) |
|---|---|---|---|---|---|---|
| 1 | thermoMap | 85 | 16.0 | 90 | 80 | 13:46 |
| 2 | thermoMap | 116 | 22.0 | 90 | 80 | 10:48 |
| 3 | thermoMap | 116 | 16.0 | 90 | 80 | 10:48 |
| 3 | S.O.D.A. | 119 | 2.80 | 60 | 70 | 08:12 |
| 4 | thermoMap | 116 | 16.0 | 90 | 80 | 10:48 |
| 4 | S.O.D.A | 119 | 2.80 | 60 | 70 | 08:12 |
| 5 | thermoMap | 116 | 16.0 | 90 | 80 | 10:36 |
| Flight Number | Date | Camouflage | Cloud Cover (%) | Observed Response | Impact |
|---|---|---|---|---|---|
| 1 | 8 May 2018 | None (black) | 100 | Substantial flushing: birds flew out in a semi-circle over water and returned | Considerable disturbance |
| 2 | 22 May 2018 | Dazzle | 50 | Substantial flushing: birds flew out in a semi-circle over water and returned | Considerable disturbance |
| 3 | 6 June 2018 | Solid sky blue | 0 | No flushing | No disturbance |
| 4 | 2 July 2018 | Solid sky blue | 0 | No flushing | No disturbance |
| 5 | 11 July 2018 | Solid sky blue | 0 | No flushing | No disturbance |
| GCPs Used | Check Points Used | Imagery Calibration (%) | Actual GSD (cm) | Mean RMS Error (m) of GCPs | Mean RMS Error (m) of Check Points |
|---|---|---|---|---|---|
| 10 | 40 | 90 | 2.74 | 0.05 | 0.23 |
| 0 | 40 | 94 | 24.37 | N/A | 23.75 |
| 10 | 40 | 94 | 25.10 | 0.29 | 0.59 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mapes, K.L.; Pricope, N.G.; Baxley, J.B.; Schaale, L.E.; Danner, R.M. Thermal Imaging of Beach-Nesting Bird Habitat with Unmanned Aerial Vehicles: Considerations for Reducing Disturbance and Enhanced Image Accuracy. Drones 2020, 4, 12. https://doi.org/10.3390/drones4020012
Mapes KL, Pricope NG, Baxley JB, Schaale LE, Danner RM. Thermal Imaging of Beach-Nesting Bird Habitat with Unmanned Aerial Vehicles: Considerations for Reducing Disturbance and Enhanced Image Accuracy. Drones. 2020; 4(2):12. https://doi.org/10.3390/drones4020012
Chicago/Turabian StyleMapes, Kerry L., Narcisa G. Pricope, J. Britton Baxley, Lauren E. Schaale, and Raymond M. Danner. 2020. "Thermal Imaging of Beach-Nesting Bird Habitat with Unmanned Aerial Vehicles: Considerations for Reducing Disturbance and Enhanced Image Accuracy" Drones 4, no. 2: 12. https://doi.org/10.3390/drones4020012
APA StyleMapes, K. L., Pricope, N. G., Baxley, J. B., Schaale, L. E., & Danner, R. M. (2020). Thermal Imaging of Beach-Nesting Bird Habitat with Unmanned Aerial Vehicles: Considerations for Reducing Disturbance and Enhanced Image Accuracy. Drones, 4(2), 12. https://doi.org/10.3390/drones4020012