1. Introduction
In the past decade, substantial technological progress has been recorded in the manufacturing of unmanned aerial platforms and affordable lightweight active and passive sensing devices, and the integration of microelectronics. Benefiting from the above, remotely controlled integrated sensing systems, which do not require an on-board crew, are being continuously miniaturized and have become widely accessible for commercial use. The development of integrated unmanned aircraft system (UAS)-based solutions is increasingly providing researchers with means to capture remote sensing data for archaeological applications, at spectral, spatial, and temporal resolutions not achievable with satellite or manned systems. UAS-based data collection is consistently becoming cost-effective given the unprecedented increase of precision and accuracy, and the ever-present capacity to cover vast, often inaccessible historical sites, of varying topographical characteristics with shorter flights and with less time-consuming acquisition planning. Thus, implementations of UAS for archaeology aim to fill in the existing gap between satellite/airborne sensing and terrestrial archaeological investigations.
The scope and spatiotemporal characteristics of an archaeological application are determinant for the optimal combination of platforms, sensing payloads, and processing techniques. This paper aims to present a comprehensive survey of the archaeological UAS-based remote sensing approaches reported in recent literature and gives a detailed account of the current state-of-the-art on relevant sensors, integrated payloads, and aerial platforms. The conducted research tracks the integration of technological advancements made during the last decade—on uncrewed platforms, lightweight sensors, and post-processing techniques—in UAS-based remote-sensing archaeological activities, in order to identify occurred opportunities and challenges and to express future perspectives.
Organization of the Article
This paper provides a systematic review and meta-analysis of UAS-based hardware, software, and data analysis scenarios relevant to archaeological applications of remote sensing.
Section 2 provides a brief overview of the development of archaeological remote sensing and identifies the problems for which UAS-based data collection is called to provide solutions.
Section 3 addresses the methodology of the presented survey.
Section 4 describes and analyzes the results of the systematic review. Specifically,
Section 4.1 reports on utilized platforms,
Section 4.2 on navigation parameters,
Section 4.3 on sensors, and
Section 4.4 on the reported cases of the applied archaeological remote sensing, and the relevant data products.
Section 5 discusses the current state-of-the-art regarding UAS-based remote sensing. Finally,
Section 6 presents some concluding remarks and perspectives.
2. Background
Traditional aerial imagery—produced with optical sensors—has proven to be beneficial to many archaeological applications. For more than eight decades, it has systematically provided an effective solution for settlement and landscape archaeology [
1,
2,
3], which has recently been combined with other non-destructive archaeological methods [
4,
5,
6,
7]. Aerial RGB imaging has been implemented in different scenarios to identify earthworks and remains that are still just observable above the ground level: by exploiting the differential shadow and highlight effects when the sun is low in the sky, the effects of melting snow and widespread flooding, as well as the existence of positive/negative cropmarks and soilmarks through identifying color differentiation from the surroundings [
8,
9].
Archaeological remote- (and close-range) sensing activities, especially concerning fully buried historical remains, depend considerably on the quantization of the contrast within their immediate context, which is often not found at the visible (VIS) spectrum. Since archaeological remains do not present spectral signatures useful for generic detection applications, it is hypothesized that they exhibit localized contrasts in the landscape matrix, detectable using suitable sensors under appropriate environmental conditions. The measurement of the desired contrast can be realized directly, when there are detectable topographic effects, or indirectly, when variations of vegetation, magnetic fields, electrical properties, thermal behavior, or spectral reflectance exist [
10,
11,
12,
13].
Airborne light detection and ranging (LiDAR) has emerged as a prevalent active remote sensing technique for the direct measurement of the effects that close-to-surface buried archaeological remains have on the topography of a landscape. Laser-based sensors are capable of providing the needed primary data for detailed digital terrain and surface models (DTM, DSM) over vast landscapes, which, if subjected to appropriate artificial hill-shading, can assist the interpretation of significantly more features than with original aerial surveys [
14,
15]. Furthermore, LiDAR has the ability to penetrate foliage, making it particularly useful for vegetated landscapes, such as tropical regions where rapid vegetative growth can obscure the microtopography of archaeologically rich terrain [
16,
17]. The artificially shaded visualization of LiDAR-produced DTMs or (the unfiltered from canopy) DSMs, which has been explored according to slope, aspect, principal component analysis (PCA), local relief modeling (LRM), sky-view factor (SVF), and trend removal [
18,
19] can further increase the visibility of archaeological features.
The detection of the landscape matrix contrast that can indirectly provide interpretations of archaeological significance, requires data from various small components of the electromagnetic spectrum, making multi-spectral and hyperspectral-sensor approaches particularly pertinent for comprehensive surveys. Towards this end, satellite imaging has contributed significantly to archaeological research since high-resolution satellite datasets became available for commercial use [
20,
21,
22]. The level of difference between the electromagnetic energy reflected and/or emitted from a feature and the background energy—as registered by the multi-spectral or hyperspectral sensor—determines the successful location and analysis of the feature [
23]. The main techniques used in archaeology for the analysis of multi-spectral imagery are visual interpretation, false color composite visualizations, vegetation and soil indices, thresholding, classification, PCA, filtering, and Geographic Information Systems (GIS) [
20,
23,
24]. Occasionally, airborne multisensory apparatuses have been involved for archaeological surveys to simulate multiwavelength imagery acquired from satellite-based sensors [
25,
26,
27]. Aerial thermography, to an extent, has also been employed for archaeological remote sensing [
28,
29] for the detection of measurably distinct variations between the features and the soil matrix in which they are embedded. Furthermore, case studies of archaeological aerial thermography with higher spatial and spectral resolution sensors have been recently reported [
30,
31].
Satellite and manned aircraft system-based remote sensing includes expensive platforms, which are significantly restrictive due to availability limitations and/or complex logistics. Moreover, satellite, and airborne imaging and LiDAR, come with noteworthy drawbacks concerning spatial and temporal resolution, and the flexibility of data acquisition [
32,
33]. Low-altitude nadiral photography, as an alternative to satellite and airborne-sensing approaches, has a long tradition of implementation for archaeological applications employing unmanned aerial platforms [
34,
35,
36], with notably varying capabilities, maximum payloads, working heights, optimal operation conditions and flexibility.
The recent technological developments in UAS-borne integrated multi-sensor systems have provided us with powerful solutions for archaeological sensing, with enhanced maneuverability, spectral range, data precision, and navigational accuracy [
37,
38,
39]. Compared to manned aerial platforms, unmanned aircraft can generally be operated with higher consistency and stability, under varying conditions and over a plethora of topographies [
40,
41,
42,
43]. Therefore, they are called to bridge the gap between satellite, airborne and terrestrial techniques in terms of spatial and temporal resolution, and to provide easy-to-use solutions for a variety of heritage specialists [
44,
45,
46]. After almost a decade of UAS-based archaeological remote sensing, it is an opportune time to review the platforms, the payloads, and the processing techniques involved so far over various applications, and to record the current state-of-the-art at the turn of the new decade.
3. Methodology
3.1. Article Selection Method
To complete the presented review and meta-analysis a thorough literature search was undertaken on UAS-based applications for archaeological remote sensing up to 18th June 2020, in line with related studies [
47,
48]. The search was done using the Google Scholar platform, and produced 272 results. Keywords for the search included drones in their various meanings and acronyms: “unmanned aircraft system”, “unmanned aerial system”, “UAS”, “unmanned aerial vehicle” [UAV], “uncrewed aerial vehicle”, “UAV”, “remotely piloted aerial system”, “RPAS”, “drone”. These were combined with terms referring to sensing, sensors, and typical archaeological applications: “remote sensing”, “low-altitude sensing”, “near-infrared”, “thermal”, “multi-spectral”, “hyperspectral”, “laser scanner”, “LiDAR”, “GPR” [ground-penetrating radar], “photogrammetry”, “heritage”, “archaeology”, “archaeological site”, “archaeological landscape”, “archaeological remains”, “buried remains”, “historical landscape”, “archaeological prospection”, and “heritage diagnostics”. In total, 65 combinations were applied using logical disjunctions. This was further complemented through reference harvesting, citation tracking, choosing abstracts from relevant conference programs, and author search using Scopus and ResearchGate, which produced an additional 30 records.
Duplicate results and results that were insufficiently relevant to archaeological research were removed, which reduced the number of results to 231. The publications were collated and revised accordingly, after full-manuscript reading (see PRISMA flowchart in
Supplementary Figure S1 checklist). The initial results were filtered according to document type. Peer-reviewed publications not reporting the use of UAS platforms or reporting the use of UAS-based imaging only as a complementary documentation means for satellite/airborne sensing were not considered. It should be highlighted that the current study also did not consider applications of metric or non-metric documentation surveys that were purposed for merely creating three-dimensional (3D) photorealistic records of archaeological remains. Therefore, articles reporting this typology of studies were discarded. Furthermore, peer-reviewed publications that solely reported the use of images as-shot with no post-processing taking place were also discarded. The final list of selected publications consisted of 68 records related to UAS-based archaeological remote-sensing applications, reporting 78 distinct studies (meaning morphologically vastly different sites or the implementation of different survey workflows). The final list included 45 journal articles, 12 conference proceedings papers, and one book chapter (see
Supplementary File S2).
3.2. Content Meta-Analysis
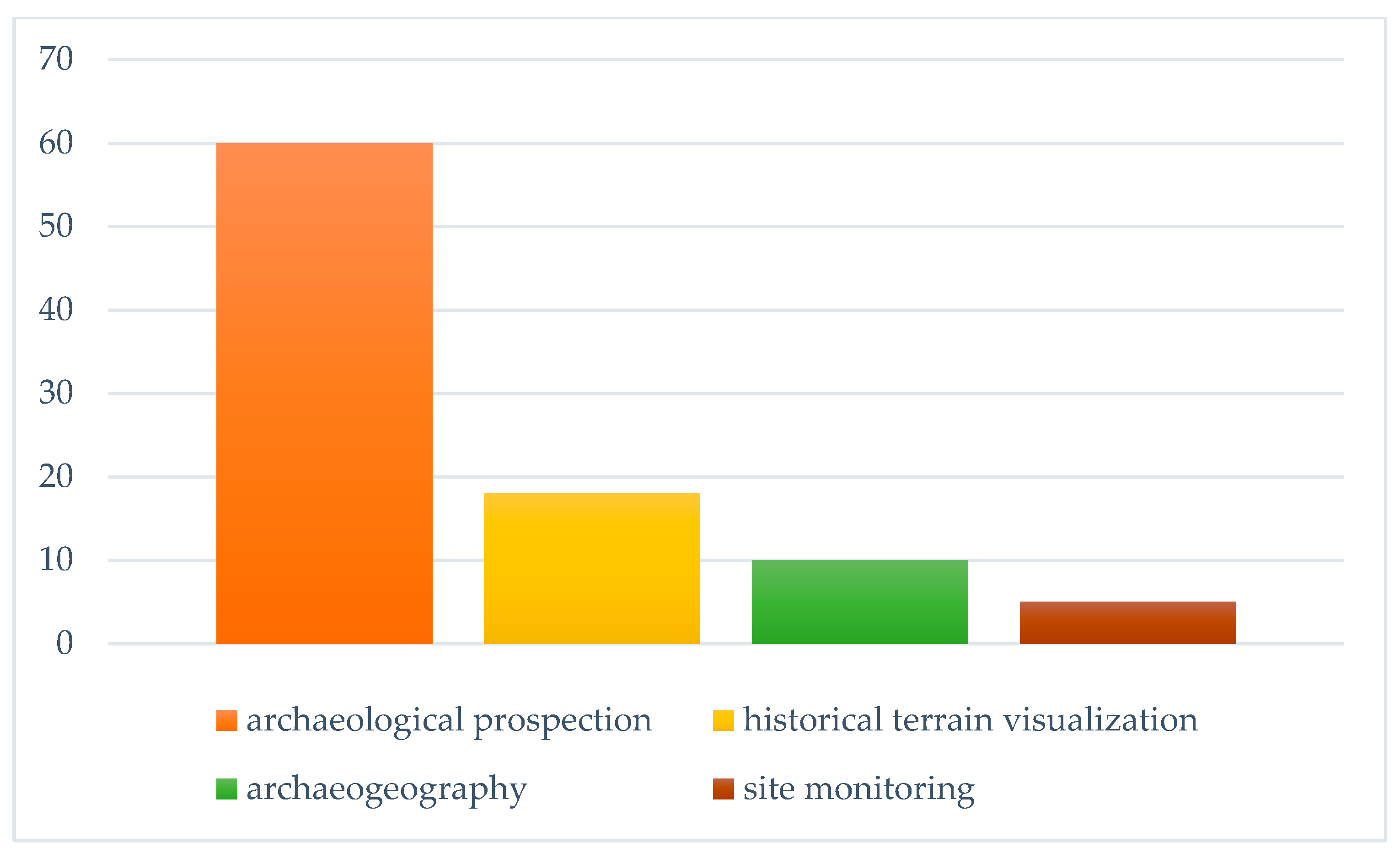
The studies were classified into four categories that correspond to representative archaeological remote-sensing fields. The categories are: “archaeological prospection” for studies aimed at the detection of buried archaeological remains either by direct sensing of their properties, or by measuring the contrast within their immediate landscape matrix (number = 60); “historical terrain visualization” for applications related to digitally enhancing the visibility of observable above ground archaeological features such as previously unburied remains, earthworks or geoglyphs, and of their immediate surroundings (number = 18); “archaeogeography” for studies directed towards analyzing the detected archaeological features—beyond plain visualization—by defining their geospatial relations (number = 7); “site monitoring” for those investigations aimed at monitoring historical landscapes and uncovering their natural or human-induced historical transformations through time (number = 4). For a few cases, an overlap was observed (number = 15), meaning simultaneous use of the same UAS-based equipment for more than one archaeological purpose, with different platform configurations, or by exploiting multiple data-processing scenarios.
For the meta-analysis, various parameters were catalogued, regarding the 78 documented studies, which are fundamental to UAS-based archaeological remote-sensing applications. These parameters for every study were: publication title, year, number of citations, thematic category, number of sensors by type, total number of sensors, sensor brand and model, number of platforms, platform type, platform brand and model, autopilot model, navigation system, flight planning software, type of processing results, spatial resolution of data, complementary terrestrial aerial or satellite sensing techniques used, and study area location. After documenting the significant parameters for each study in a spreadsheet, we performed in-depth data cleaning and confirmed the values of the designated parameters to guarantee data quality and correctness. We performed exploratory analyses using column plots to determine if any trends were evident, regarding UAS-based data acquisitions and processing workflows, in archaeological remote sensing. We were primarily interested in determining the correlations between platforms, sensors, typologies of archaeological terrain, application scenarios, and categories of results obtained.
3.3. State-of-the-Art Survey
In addition to the meta-analysis, we performed a survey of the state-of-the-art of standalone sensors, integrated payloads, and ready-to-fly UAS, available at the time of our review, purposed for archaeological remote-sensing surveys. We also included integrated aerial systems manufactured for other applications—mainly for precision agriculture and infrastructure inspection/monitoring—which can adequately be used for the topics discussed in this paper without additional modifications.
4. Meta-Analysis Results and Discussion
The 68 identified publications [
49,
50,
51,
52,
53,
54,
55,
56,
57,
58,
59,
60,
61,
62,
63,
64,
65,
66,
67,
68,
69,
70,
71,
72,
73,
74,
75,
76,
77,
78,
79,
80,
81,
82,
83,
84,
85,
86,
87,
88,
89,
90,
91,
92,
93,
94,
95,
96,
97,
98,
99,
100,
101,
102,
103,
104,
105,
106,
107,
108,
109,
110,
111,
112,
113,
114,
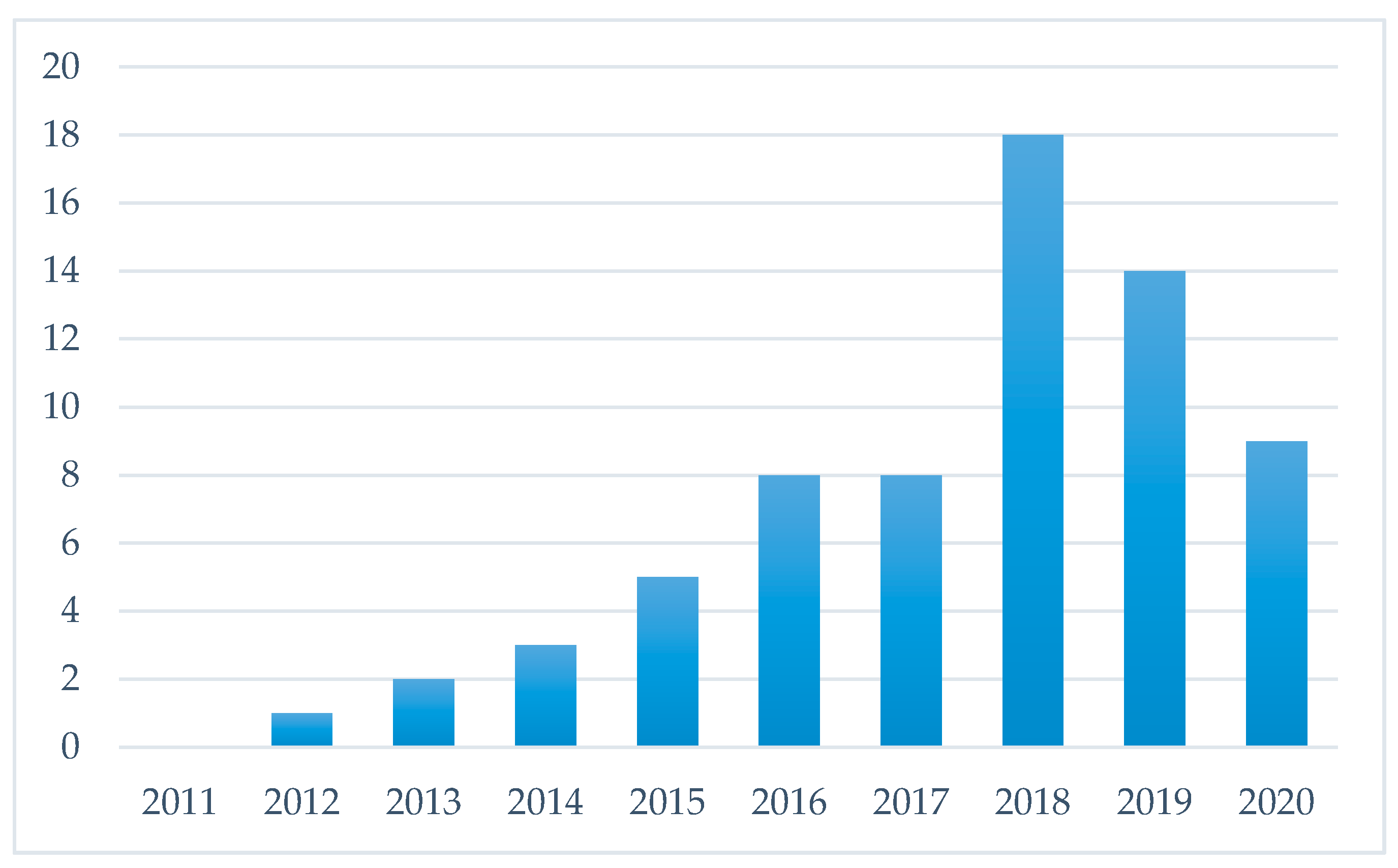
115,
116] related to UAS-based archaeological remote sensing, were published between 2012 and 18 June 2020 in 36 different publications/journals. Collectively the International Society of Photogrammetry and Remote Sensing has published 9 articles (~13.2% of the total number of analyzed publications), under the
International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences,
ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, and
ISPRS International Journal of Geo-Information. The WILEY journal
Archaeological Prospection published the largest number of articles (8), while Elsevier’s
Journal of Archaeological Science: Reports published 5 and MDPI’s
Remote Sensing published 4. The trend in publication had increased each year steadily, until 2018, with the maximum growth in the number of articles published observed between 2017 and 2018 (
Figure 1). Citation information derived from Google Scholar shows that the average number of times each publication has been cited is 9.2, with a minimum of 0, a maximum of 84 ([
55] published in
Journal of Archaeological Science), and a median of 3. Archaeological prospection related applications accounted for ~77% of the documented studies, while much smaller numbers were observed for the other types of applications, ~23% for historical terrain visualization, ~13% for archaeogeography, and ~6% for site monitoring applications (
Figure 2). Nevertheless, the studies included in the meta-analysis covered a wide range of archaeological contexts and, broad geographic extent.
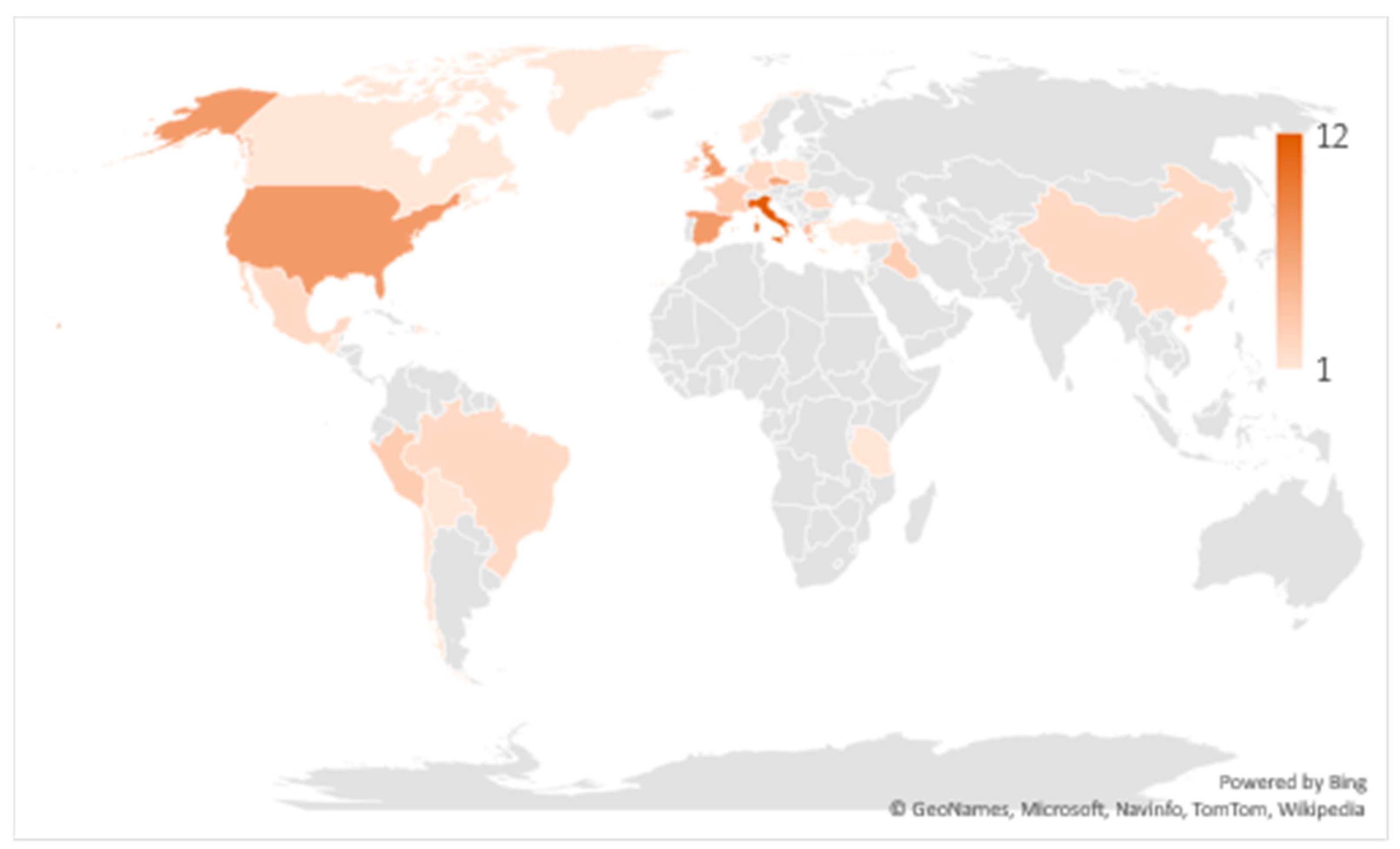
Study locations were mapped from the 68 publications, and it was found that UAS have been employed in applied archaeological remote sensing across the world with primary clusters of activity in Europe and North America (
Figure 3). A secondary cluster was observed around the tropical countries of Central and South America where dense canopy is obscuring the rich archaeological landscapes and, therefore, increasingly more studies are taking place to reveal and to visualize the hidden historical terrains. Italy leads the ranking of countries where UAS-based archaeological studies have taken place (12), followed by Spain (7), the United States of America (7), Czech Republic (6), the United Kingdom (6), and Greece (4).
4.1. Platforms
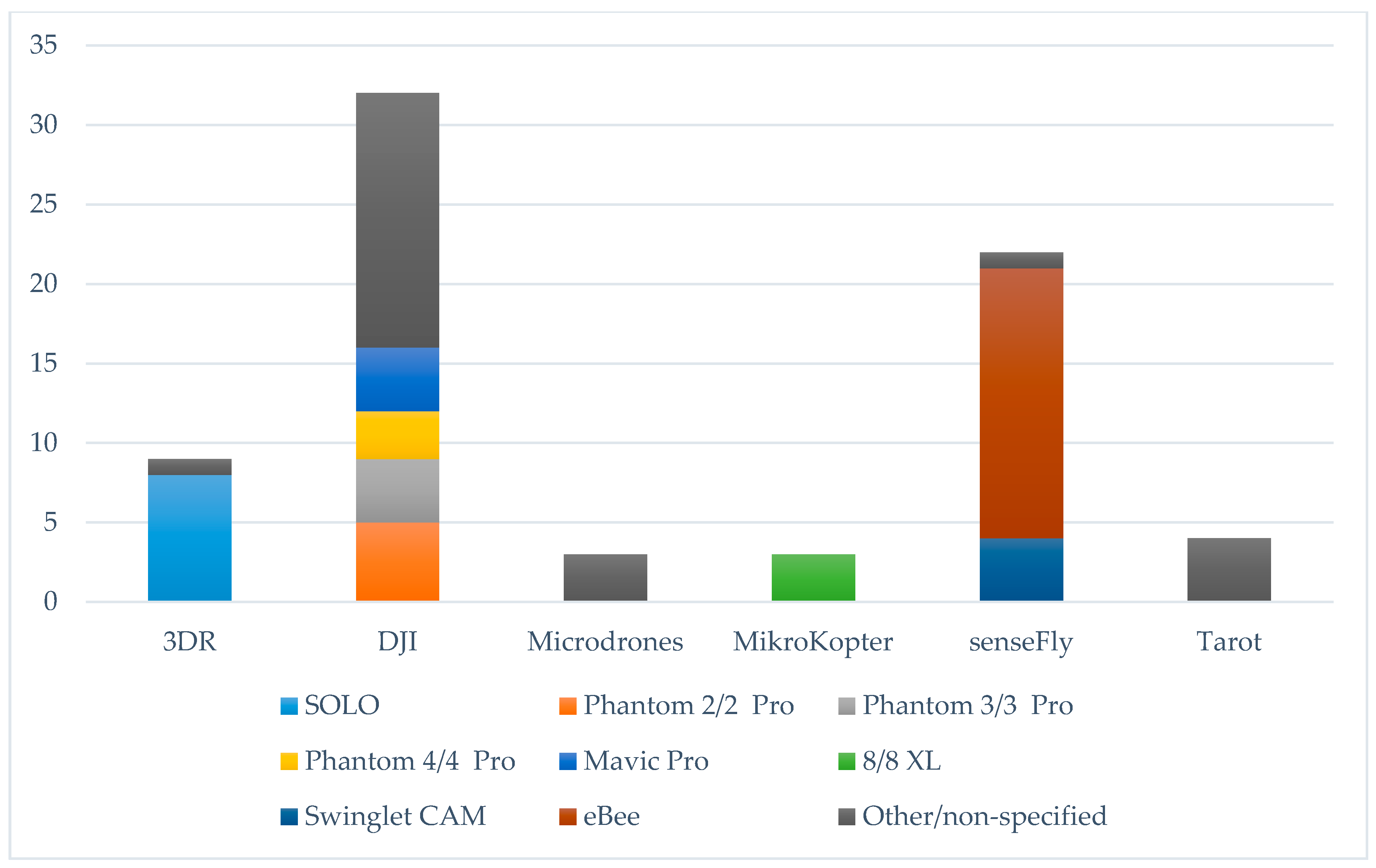
The majority of studies (60) reported using multirotor-style platforms, which can be attributed to easier maneuverability, higher stability, and the capacity to carry heavier payloads with smaller platform size-to-payload ratios. Only 27 studies reported the use of fixed-wing platforms. In total, 91 platforms were involved in the studies, of which 27 were fixed-wing, 42 quadcopters, 12 hexacopters, and 14 octocopters (circle-shaped, v-shaped, and X8 rotor configurations). The most commonly used platform (
Figure 4) was the senseFly eBee, a fixed-wing platform which can be purchased around
$25,000 USD with real-time kinematic (RTK) positioning enabled and a SODA 20 MP RGB camera, has a maximum flight time of 50 m, 33 km flight range and optional multi-spectral and thermal sensors available. Other popular choices included the DJI Phantoms and the (discontinued) 3DR SOLO. A few studies reported the use of a custom made platform.
4.2. Navigation
A high percentage of the UAS (at least 70%) used for the analyzed studies, and specifically those manufactured by DJI, Microdrones, and senseFly, were ready-to-fly and, therefore, pre-equipped with an autopilot system for navigation control. Of the studies using not ready-to-fly UAS systems, only a few reported the utilized model of autopilot, with Ardupilot APM, Pixhawk, DJI Naza, and the MikroKopter Flight-Ctrl series appearing more often. Similarly, regarding on-platform hybrid measurement units/hybrid navigation system (HMU/HNS), most platforms were already pre-equipped, and only 2 of the studies utilizing non-pre-integrated navigation units [
110,
112] reported which models were involved; namely an Applanix APX-15 and a NovAtel SPAN-IGM-S1. Most studies (55) reported the use of flight planning software, and only 5 reported performing manual flights, while for the majority of the rest of the studies—that did not report about this matter—it was assumed that flight planning software was used, according to the description of the acquired datasets. The MikroKopter Tool, Pix4Dcapture app, senseFly eMotion, and the free, open-source ArduPilot Mission Planner were the ones encountered more often.
4.3. Sensors
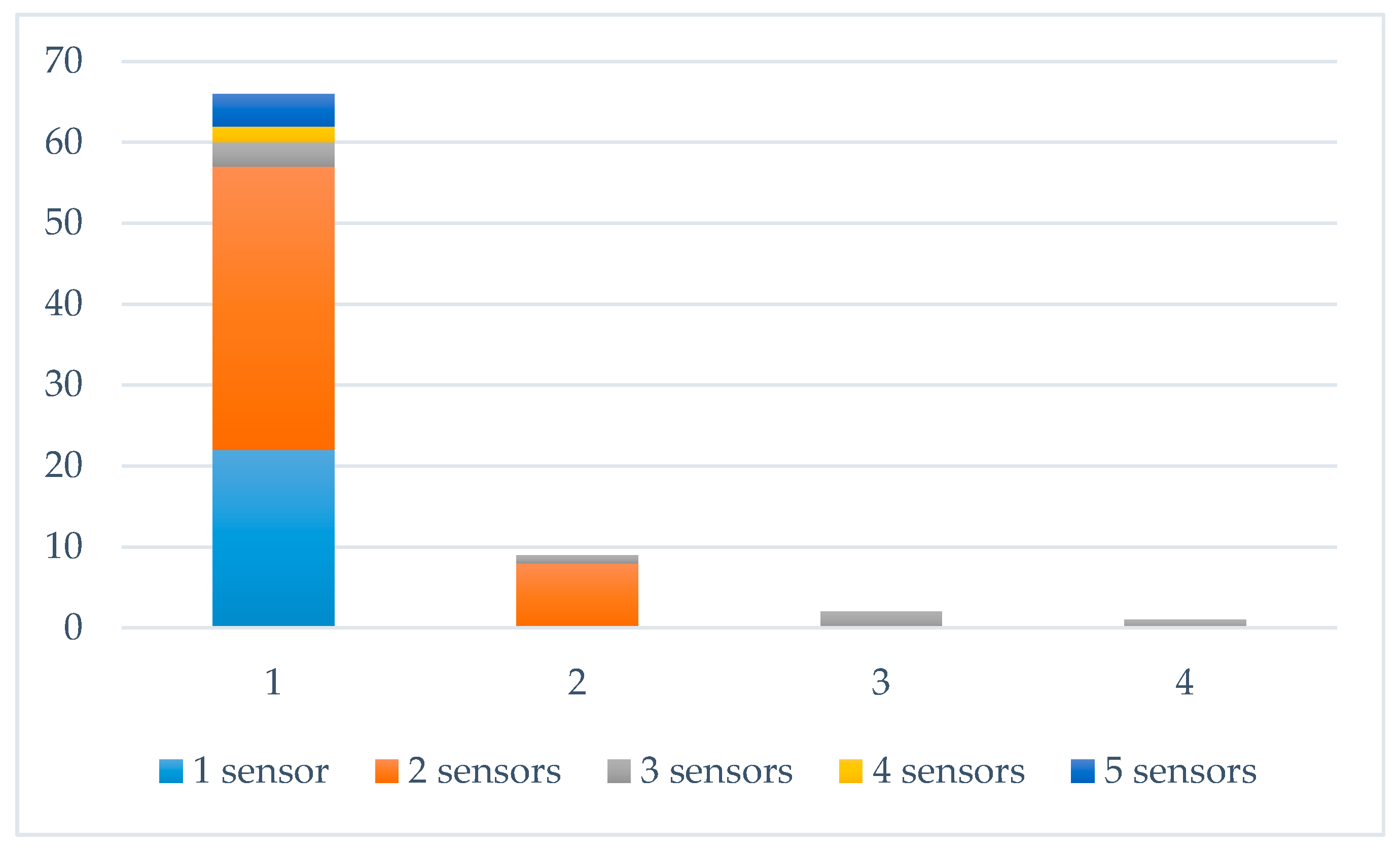
Significantly, 56 studies reported the utilization of multiple sensors, and 12 studies also reported employing multiple platforms (
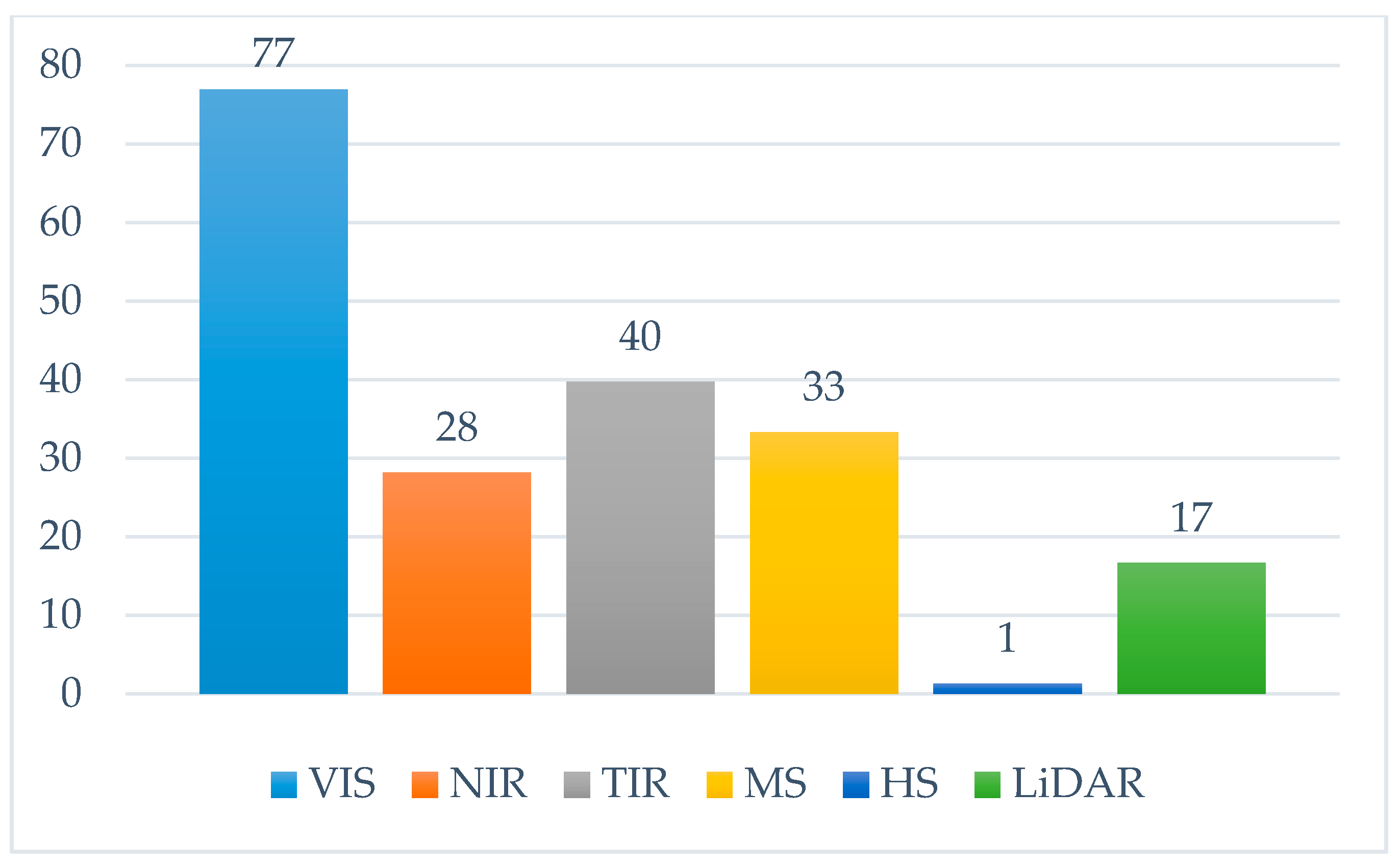
Figure 5). Ten studies used LiDAR sensors, 22 studies used near-infrared (NIR) cameras, 31 studies used thermal-infrared (TIR) cameras, 26 used multi-spectral cameras (MS), and a single study used a hyperspectral (HS) camera (
Figure 6). Studies overwhelmingly used pre-equipped or off-the-shelf red, green and blue (RGB) cameras (77%), mainly in combination with other sensors. Canon cameras were a popular choice (used for 31% of the total studies), as 17 studies used Canon off-the-self cameras for RGB acquisition, while 16 studies used Canon cameras for NIR acquisition after they were subjected to a modification in order to be sensitive only in a portion of the NIR spectrum.
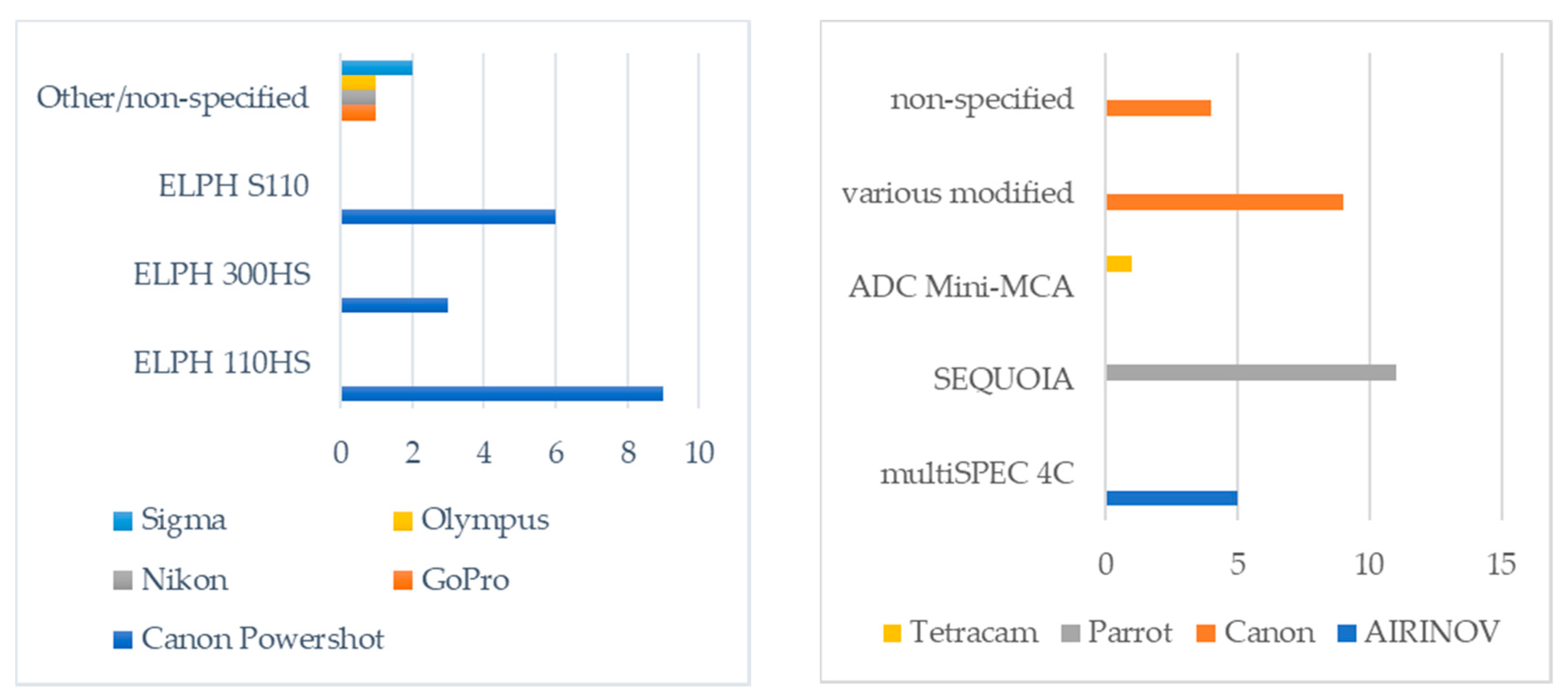
All reported NIR data acquisitions were performed with commercial digital cameras (digital-single-reflex, compact, and action cameras), modified by either the manufacturer of the UAS platform or the researchers. Canon PowerShot ELPH 110HS, PowerShot ELPH 300HS, and PowerShot ELPH S110 were the most frequently used cameras modified for NIR imaging (
Figure 7–left). The most recurrently used MS camera was the Parrot Sequoia (11 studies), whereas modified Canon cameras were used in 9 studies, the AIRINOV Multispec4C was used in 5 studies, and the Tetracam ADC Mini-MCA and the MAPIR Survey2 cameras were each reportedly used once (
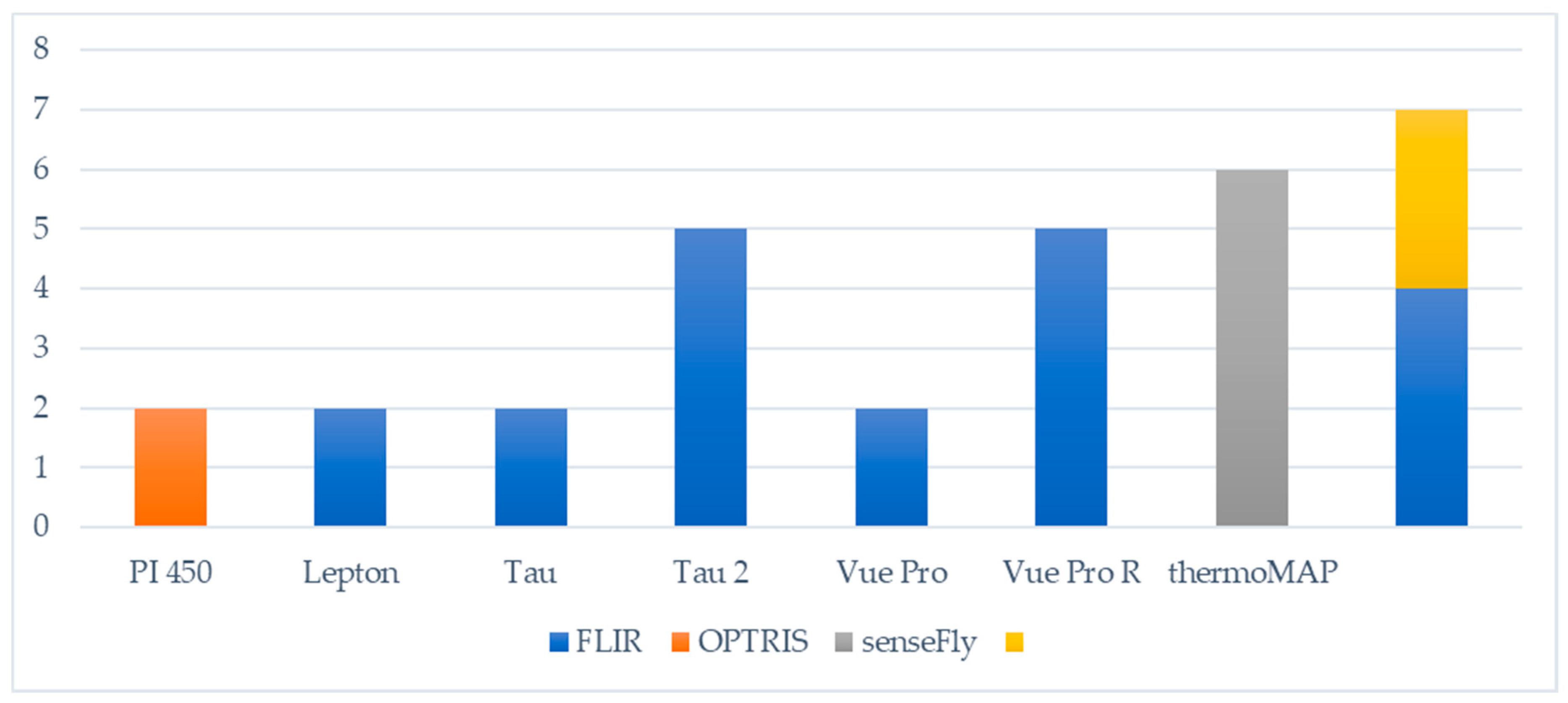
Figure 7–right). Regarding TIR sensors, 16 FLIR-manufactured cameras purposed for UAS integration were reported, but the senseFly thermoMAP was the most popular thermo-camera solution (
Figure 8). Most studies captured imagery with nadir—or near nadir—facing cameras; only a handful of studies stated they captured oblique imagery.
Amongst the miniaturized LiDAR solutions, the Riegl VUX-1UAV and Velodyne VLP-16 were the most used, each having been utilized three times. Furthermore, the Riegl miniVUX-1UAV, the Sparkfunk LiDAR-Lite V2, and the Yellowscan Mapper were used once, while there were also two unreported LiDAR sensors involved in the recorded studies.
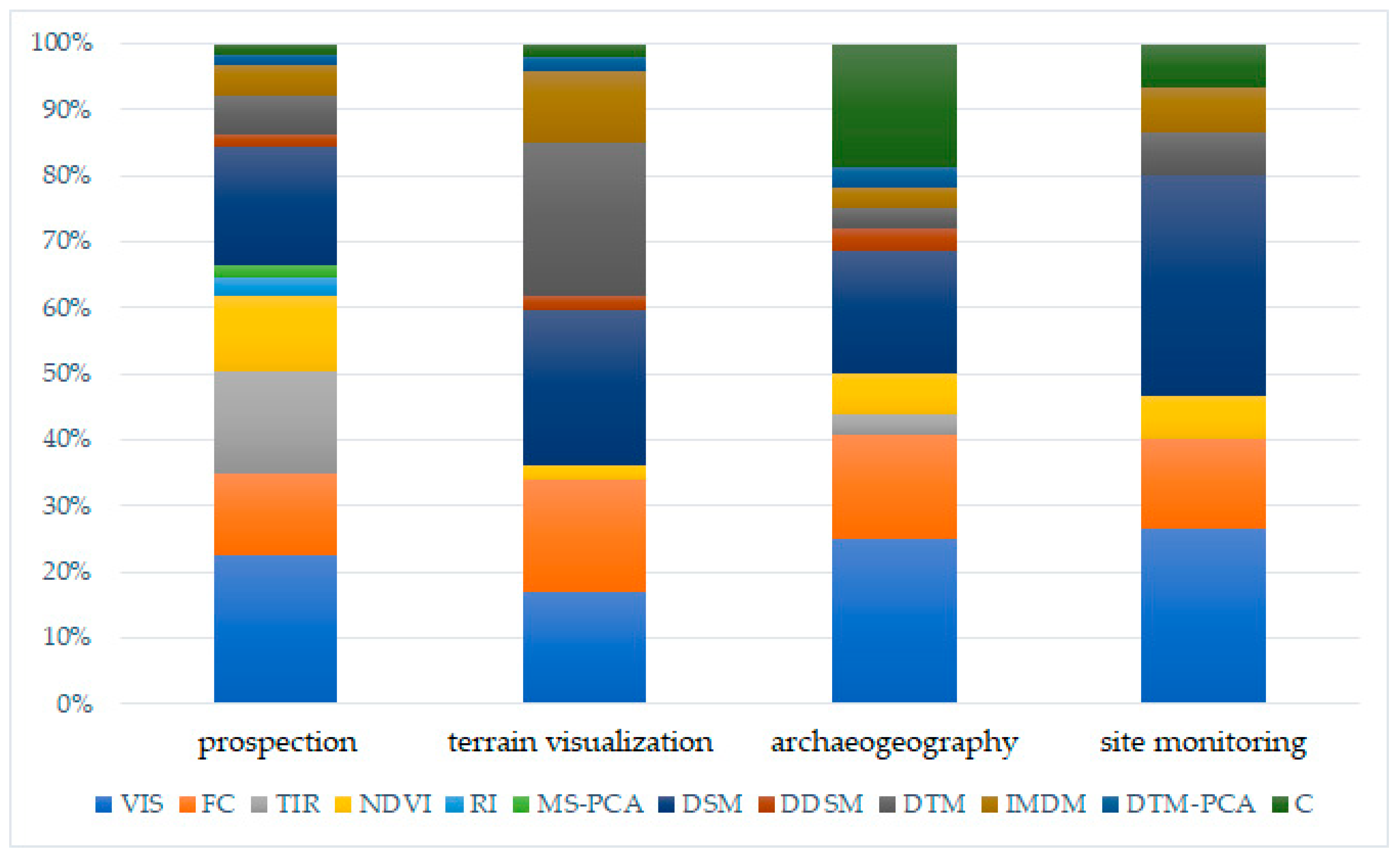
4.4. Data Products and Applications
A major part of the recorded UAS-based archaeological prospection activities involved the interpretation of visible spectrum orthophotos/orthophoto-mosaics (68%) and DSMs (55%; for relative percentages see
Figure 9), which were mainly produced using structure-from-motion (SfM) and multiple-view-stereo (MVS) approaches. The level of involvement of these products in archaeology can be explained by the high level of automation achieved in the last years, which allows almost automated mapping workflows—from acquisition to analysis of mapping results—for archaeological applications. Flight planning, pre-processing of the images, image-based modeling, production of digital elevation models (DEMs), production of visible, thermal and index maps, and point cloud and image classifications can be realized using the same workstation and software, with minimal interventions, even in real-time. Studies overwhelmingly utilized the Pix4D software platform as an integrated solution to capture imagery datasets (through the mobile application) and create digital models or orthoimages for classification and analysis. Agisoft PhotoScan/Metashape and ArcGIS have also been implemented in a handful of studies for the digitization and analysis procedures, respectively. Visible orthoimages were commonly exploited towards the manual identification of crop-marks and the integration with results acquired from other spectra to acquire false-color composites. Brooke and Clutterbuck [
52] reported an innovative image-enhancing approach using visible spectrum orthophotos; they used Wallis color filtering to increase local contrasts between buried masonry and grass. Additionally, Masini et al. [
81] performed multi-temporal investigations to compare negative cropmarks, positive cropmarks, grass marks, and damp marks caused by buried remains. DSMs were interpreted without additional processing in many studies. However, De Reu et al. [
72] and Šedina et al. [
101] used multitemporal DSMs to construct differential digital surface models (DDSMs), and monitor change over excavated archaeological sites and crop marks, respectively. Several studies exploited the DSM products for interpretative mapping of the archaeological features through PCA and artificial shading [
61,
63,
72,
79,
88,
89,
96,
97,
100,
101].
False-color and TIR-orthoimages appeared often in prospections studies (37%, and 47% of the prospection studies respectively). False-color multichannel composites were produced either by using the MS datasets for image-based modeling directly or by combining overlapping orthoimages of different wavelengths. Most MS composites where either reduced through PCA [
50,
84,
109] or processed for normalized difference vegetation index (NDVI) mapping [
50,
52,
54,
56,
57,
60,
66,
67,
68,
70,
71,
72,
75,
76,
84,
85,
86,
97,
99,
104,
109], in order to enhance the contrast between the proxies of buried remains and the landscape matrix. It is worth mentioning that a few studies [
50,
60,
75,
86,
97,
99] reported the use of multiple radiometric vegetation and soil indices to identify which wavelength combinations maximized the local contrasts. Another notable finding was that all thermal investigations were purposed towards archaeological prospection activities. Multi-temporal thermal acquisitions often appeared in the analyzed studies. At the same time, McLeester et al. [
84] also pointed out how thermal orthoimages have to be corrected through several steps—from stripping caused by the TIR camera’s periodic self-calibration and the thermal sensor’s temperature variations during acquisition—to accurately extract temperature information. Lastly, few prospection studies also reported the use of DTMs to identify topographic reliefs caused by buried historical remains [
58,
59,
73,
93,
96,
98,
112]
Activities referring to the accurate visualization of archaeologically rich terrain with UAS-assisted approaches have either explored the use of DSMs or DTMs. While DSMs have been mainly produced with SfM/MVS image-based approaches, DTMs of vegetated areas have been exclusively produced with miniaturized LiDAR sensors [
87,
96,
98,
110] or by filtering 3D point clouds derived from image-based modeling with NIR imagery datasets, before constructing the terrain model [
49,
106]. To a lesser extent, the visualization of historical terrains towards the better interpretation of historical landscapes has been explored in the bibliography by interpretative mapping techniques [
65,
88,
96,
100].
In UAS-based archaeogeography applications, the rectified images, ortho-mosaics and raster elevation images have been used in a great extent, and analyzed through classification and shape analysis techniques, to interpret the shape of historical structures [
110], the distribution of historical [
69] and traditional structures [
78], buried remains [
77,
85], and archaeological artifacts [
74,
114,
116].
Lastly, five applications relevant to UAS-based site monitoring and landscape archaeology have been recorded, most reporting the use of MS data acquisitions. Fenger-Nielsen et al. [
64] used NIR intensities detected with a Parrot Sequoia, in combination with soil-content data from site-sampling and satellite imagery, to study the distinct spectral characteristics of vegetation within archaeological sites in Greenland, which showed great potential for archaeological investigations in the Arctic. Khan et al. [
73] exploited terrain data obtained with the survey-grade VUX1–UAV LiDAR and two MS cameras, and integrated them with in situ collected archaeological, archaeobotanical, paleo-ecological, and soil data to investigate the scale and nature of the impact of pre-Columbian humans in transforming the Amazonian rainforest landscapes. Mather et al. [
82] performed classifications on RGB and NIR imagery data captured with different UAS, and then overlaid—also UAS-captured—topographic data in order to understand the origin of relict landform features. Sonnemann et al. [
113] overlaid orthomosaics produced with UAS imagery on high-resolution LiDAR-derived DEM to investigate the topography of pre-colonial settlements in the Caribbean.
5. State-of-the-Art
Overall, the significant developments in unmanned navigation, drone platform manufacturing, integrated sensor miniaturization, and mapping software that have taken place over the last decade, established UAS-based approaches as a significant part of photogrammetry and remote sensing [
117]. Benefiting from the above, archaeological science has taken one step forward into embracing these new technologies, through various applications—as discussed earlier. Archaeological low-altitude sensing has substantially evolved from the use of platforms purposed for recreational and photographic uses. It has not only engulfed the advancements of those sensors and integrated systems specifically oriented towards archaeological applications but has also benefited from the progress in other fields, for example, precision agriculture and monitoring of structures, who profit from similar UAS-borne sensing. Recent archaeological studies expand the scientific horizons beyond the visual interpretation of the data products and discuss how previously invisible and undocumented features are revealed, while simultaneously paying attention to the spatial and radiometric accuracy and precision of presented results. It goes without saying that high-resolution and high-accuracy products, and information retrieval from multiple wavelengths, are accompanied by considerable costs. Although a trend is evident regarding researchers who invest in high-end fully autonomous integrated UAS, more application-oriented projects seem to prefer custom solutions. Therefore, in this section, we provide information on both integrated ready-to-fly UAS and specialized options for payload integration.
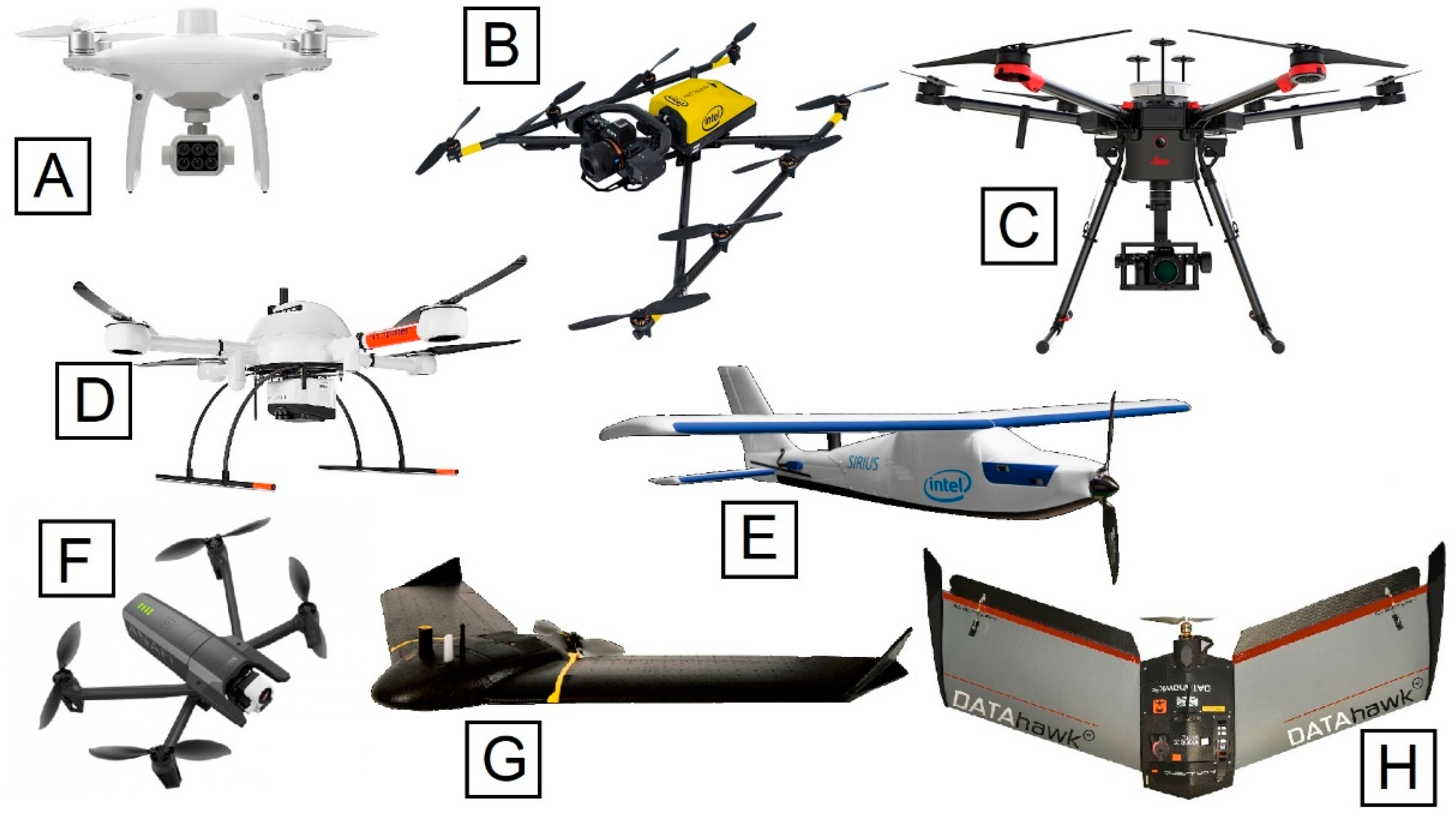
Table 1 provides some examples of integrated solutions, which are purposed or can be repurposed for archaeological remote sensing surveys (also examples in
Figure 10). The reported integrated systems are ready-to-fly UAS with pre-equipped navigation system, autopilot, sensors, gimbals, and all necessary electrical on-board equipment.
5.1. Platforms
UAS operated for archaeological remote sensing mainly fall into the
Micro (<2 kg weight, up to 200 m altitude, <5 km radius, <1 h endurance),
Mini (2–20 kg weight, up to 3000 m altitude, <25 km radius, 1–2 h endurance), and seldom
Small (20–150 kg weight, up to 5000 m altitude, <50 km radius, 1–5 h endurance) categories (after Qi et al. [
118]). While the quality of acquired datasets depends largely on on-board sensors (described in
Section 5.4,
Section 5.5,
Section 5.6 and
Section 5.7), platform typology and configuration play an essential role in the success of the remote-sensing mission, simultaneously constraining the payload that may be deployed and the flight planning. Fixed-wing UAS have a clear advantage in archaeological surveys because their longer flight autonomy allows the coverage of much more extensive historical sites and landscapes than the average multi-rotor (
Table 2). Fixed-wing aircrafts’ increased stability allows greater control over flight parameters and the quality of collected data. However, the competition with rotary-wing aircraft is always present because multi-rotors have greater maneuverability and allow heavier payloads and more customizability, therefore having more options for sensor integration.
Multi-rotor UAS are additionally more compact (speaking for the same platform body size-to-payload weight ratio), and subsequently more easily transportable. Despite their short flying duration, which limits the archaeological area that can be covered within a single flight, they have some distinct attributes that may be necessary in certain contexts, as the ability to hover and capture data while remaining over one place, the ease of capturing oblique imagery, and vertical take-off and landing that allows for more flexible deployment in areas that would be inaccessible with fixed-wing aircraft. Some conventional multi-rotor frames used in customized UAS for archaeological applications are MikroKopter’s MK8-2500 (8 rotors, folded dimensions 64 cm × 60 cm, max. payload 2.5 kg) and MK8-3500 (8 rotors, max. payload 3.5 kg), and VulcanUAV’s Black Widow (4 rotors, max payload 4.6 kg) and Raven (8 rotors-X8 configuration, max. payload 10 kg).
5.2. Orientation Systems
The miniaturization of computer boards, Global Navigation Satellite Systems (GNSS) receivers and antennas, inertial measurement units (IMUs) and, in general, electronics has allowed the integration of hybrid measurement units (HMU) for UAS whose measurements can be processed, in a hybrid navigation system (HNS) or in post-processing, in a hybrid orientation system (HOS). The results depend on the quality of the GNSS receiver and the GNSS antenna, and the accuracy of the attitude part of the orientation is highly dependent on the IMU quality and flight dynamics. To deliver orientation parameters, and data products at cm-level with increased reliability, primarily two modifications of kinematic GNSS measurements are being adopted for UAS applications. RTK—which considers that there is real time communication of the UAS with a ground reference station (using radio link)—delivers corrections to GNSS measurements during the flight. Post-processed kinematic (PPK), on the other hand, depends on corrections from a reference station that are applied post-flight [
120,
121]. As RTK-enabled receivers have already been available on several commercial platforms, and PPK is becoming more common for UAS-based archaeological surveys, it is useful to review the current capabilities of HMU and HNS solutions for unmanned aircraft operations. Therefore, the state-of-the-art integrated solutions are presented in
Table 3, taking into consideration that the values given are simply indicative as they include general specifications and optimal testing conditions.
5.3. Light Detection and Ranging (LiDAR) Sensors
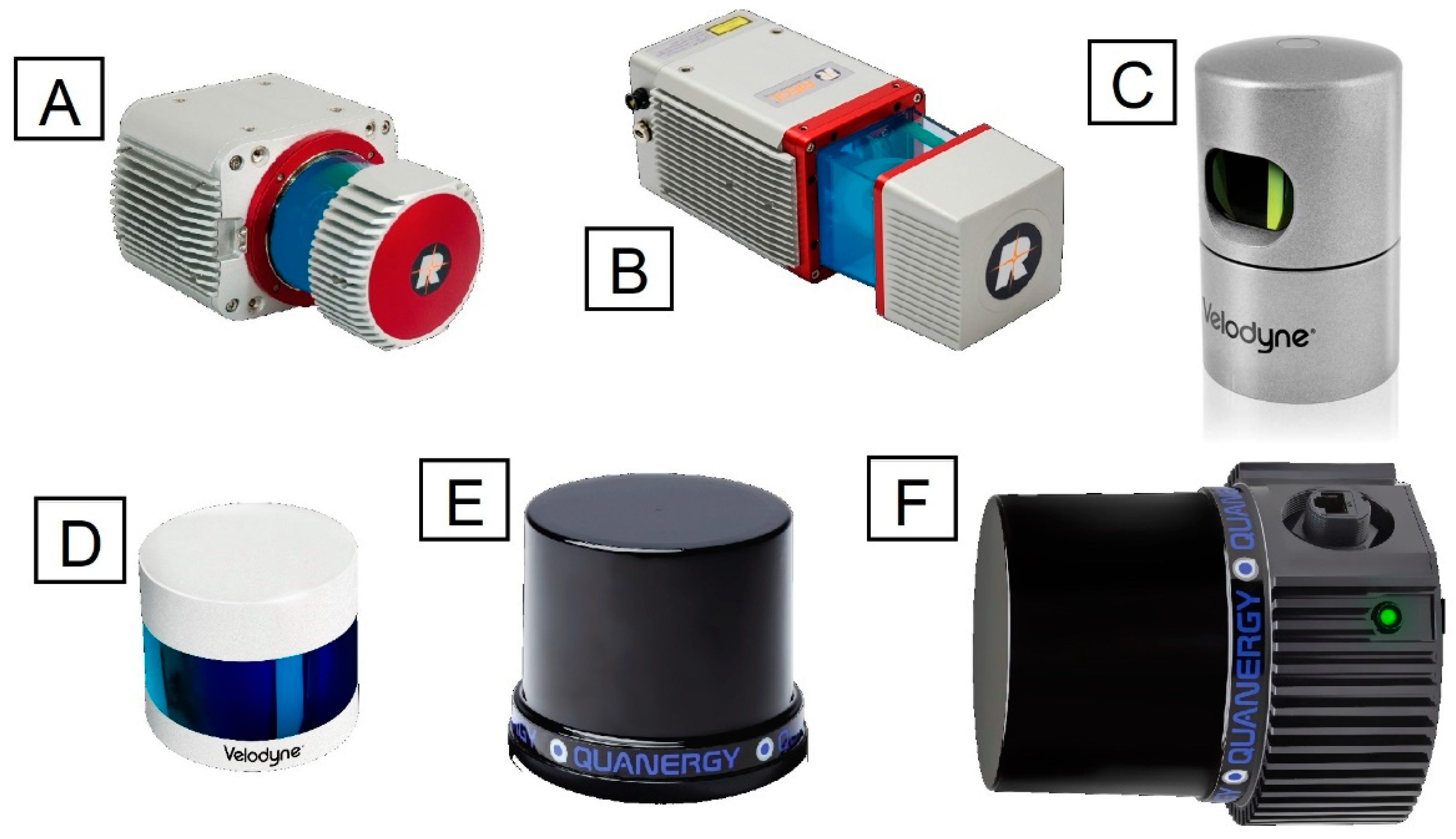
The reduction in LiDAR sensor size and price are making them more common for UAS-based archaeological surveys. The market of 3D laser scanners for unmanned platforms has grown rapidly, and the technological developments are increasing the quality of data acquired by these sensors. This creates the prospect of replacing airborne LiDAR since essential characteristics of LiDAR data are largely unaffected by the carrying platform, which implies that existing well-developed processing techniques can be used on these data. Limitations caused by the tradeoff between performance and size or cost of LiDAR, can be partially overcome by the proximity of the sensor and the surveyed area in comparison to airborne scanning. Presently Quanergy, Riegl, and Velodyne dominate the market of LiDAR sensors manufactured to be mounted on UAS (examples in
Figure 11), as the overwhelming majority of integrated payload for scanning, include their products.
Table 4 presents the available lightweight LiDAR sensors. A detailed account of integrated LiDAR payloads can be found in
Appendix A.
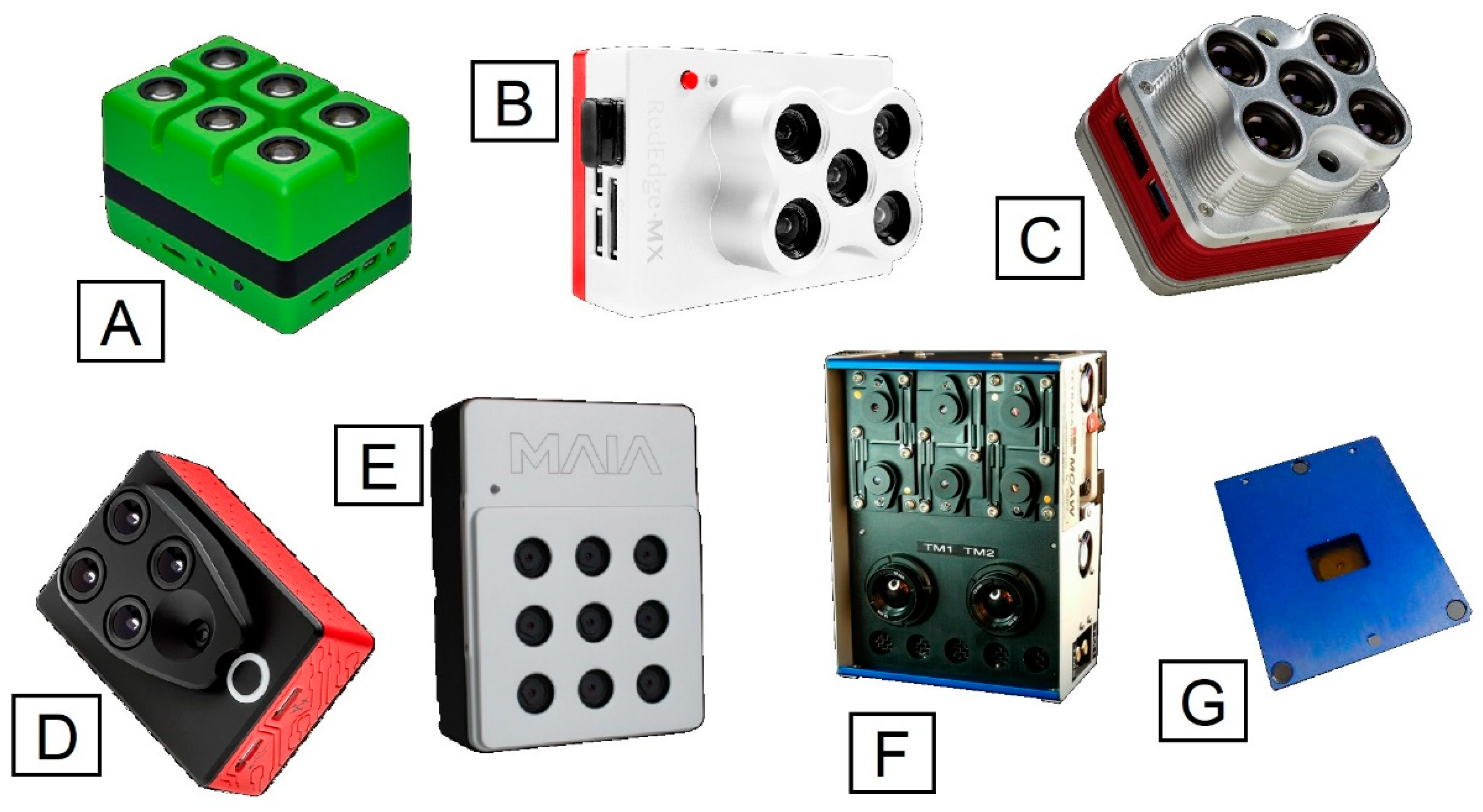
5.4. Near-Infrared and Multi-Spectral Cameras
The exploitation of NIR imagery can contribute significantly to UAS-based archaeology [
122], and therefore various sensor solutions have been explored to incorporate the NIR spectrum in prospection-related applications. As the meta-analysis revealed, the Canon S110 digital cameras, modified for red-edge and near-infrared imaging, have been frequently used over the past decade, serving as a default multi-spectral solution for the senseFly fixed-wing aircrafts until 2014. These cameras are currently being replaced by various high-resolution models, as the modification of compact and digital single-lens reflex (DSLR) cameras, for beyond-visible acquisition, becomes more prevalent. At the same time, various lower-resolution lightweight camera options for UAS-based MS imaging are available, having the advantage of more than three narrower bands.
Table 5 summarizes the characteristics of some typical and/or representative camera options (in
Figure 12).
5.5. Hyperspectral Cameras
To cover the need for the detection of information from multiple very narrow bands of the electromagnetic spectrum [
123], and towards the more accurate calculation of vegetation and soil indices, HS imaging sensors have consistently been miniaturized, and can currently be mounted on UAS platforms. Some of them are listed in
Table 6 (also examples in
Figure 13). It is the authors’ opinion that these sensors will continue to play a significant role in UAS-based archaeological prospection, and geoarchaeology.
5.6. Thermal Cameras
There have been essential advancements in thermal camera miniaturization in recent years. Lightweight, small-size LWIR imagers, such as those developed by FLIR, were first introduced in a military context for remote reconnaissance and are becoming more common in UAS-based remote-sensing applications such as archaeological prospection.
Table 7 compiles some existing products in the family of thermal sensors, suitable for light UAS (also examples in
Figure 14).
5.7. Ground-Penetrating Radars
A ground-penetrating radar (GPR) is an active non-destructive geophysical sensing technique that utilizes electromagnetic radiation in the microwave band and has always been entangled with archaeological prospection for the subsurface mapping of artifacts, features, and patterning [
124,
125]. Although there are currently no integrated payload solutions for UAS-borne microwave-based detection, a few recent studies report experiments towards the manufacture of customized systems for GPR non-destructive applications [
126,
127,
128].
6. Conclusions
The last decade was marked by a radical miniaturization and integration of UAS-mounted sensors, which gradually fostered the adoption of low-altitude sensing techniques for archaeological applications, including but not limited to prospection. Notwithstanding the considerable number of works reviewed here, UAS-based archaeological remote-sensing applications and, especially, those dealing with the beyond-visible spectra to identify multi-spectral contrast variations, are still scarce. This is most likely because the relevant technology has only recently reached a certain level of maturity and high-resolution solutions remain considerably expensive. The recently observed trends, regarding increasingly more metrically and radiometrically accurate data-acquisition and data production in archaeological surveys, and the adoption of well-established processing and analytical techniques from satellite and airborne sensing, suggest a promising perspective. However, the aspects of spatial precision and accuracy still remain undocumented in numerous archaeological surveys which suggests a need for better training regarding metric concepts and for increasing the collaborations between archaeologists and geomatics experts to achieve optimal results in archaeological remote-sensing projects. Metric, radiometric and semantic contents of acquired archaeological data and meta-data should not be neglected as they contain valuable information for archaeological interpretations. It should be further highlighted that automation in the detection of historical residues remains an undeniably complex and challenging task due to the unique morphological, stratigraphical, topographical and archaeological characteristics of each archaeological site [
129,
130,
131]. For this reason the majority of UAS-borne prospection studies still depend on the parallel acquisition of data with ground-based geophysical methods such as electrical resistivity surveys, ground-penetrating radar, electromagnetic conductivity surveys, and magnetic gradiometry surveys, on historical aerial footage, and on satellite datasets, which complete our perspectives over historical terrains. Lastly, the authors would like to point out that, despite the observed allocation of the analyzed studies on a global scale, the gaps on the relevant map do not necessarily reflect the contemporary worldwide distribution of archaeological remote-sensing research. There are various reported examples of innovative archaeological studies in Oceania and Asia [
132,
133,
134,
135]—actively using drones—which due to the strictly set selection criteria were excluded from the presented meta-analysis. The typology of the historical remains also plays a large part in this distribution anomaly. However, UAS-based remote sensing is widely applied in these areas, mainly directed towards heritage recording.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



 *
*


 *
*


 *
*


































































 *
*


 *
*


 *
*










































 *
*


 *
*


 *
*


 *
*












