Development, Modeling and Control of a Dual Tilt-Wing UAV in Vertical Flight




Abstract
:1. Introduction
2. Methods
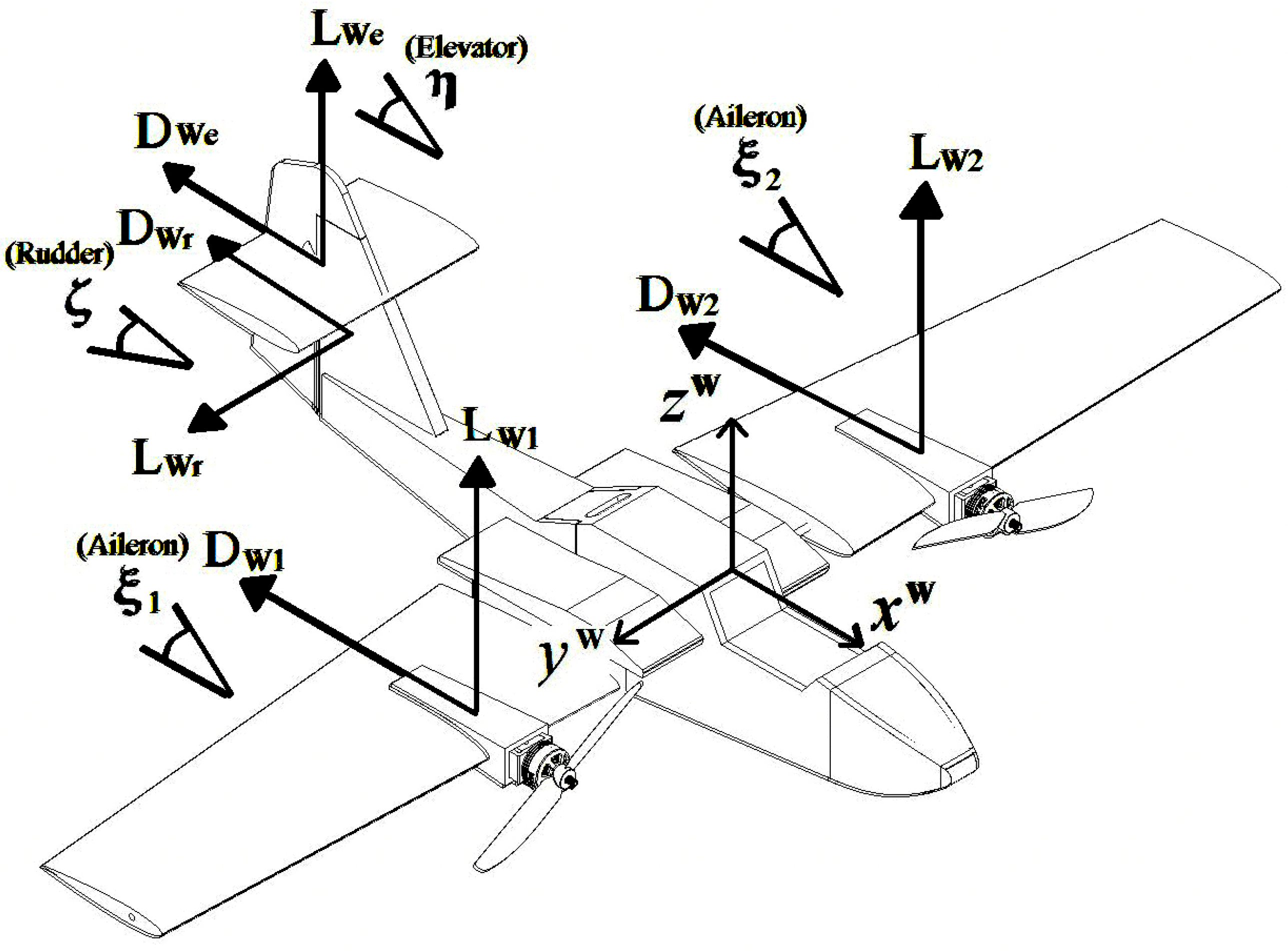
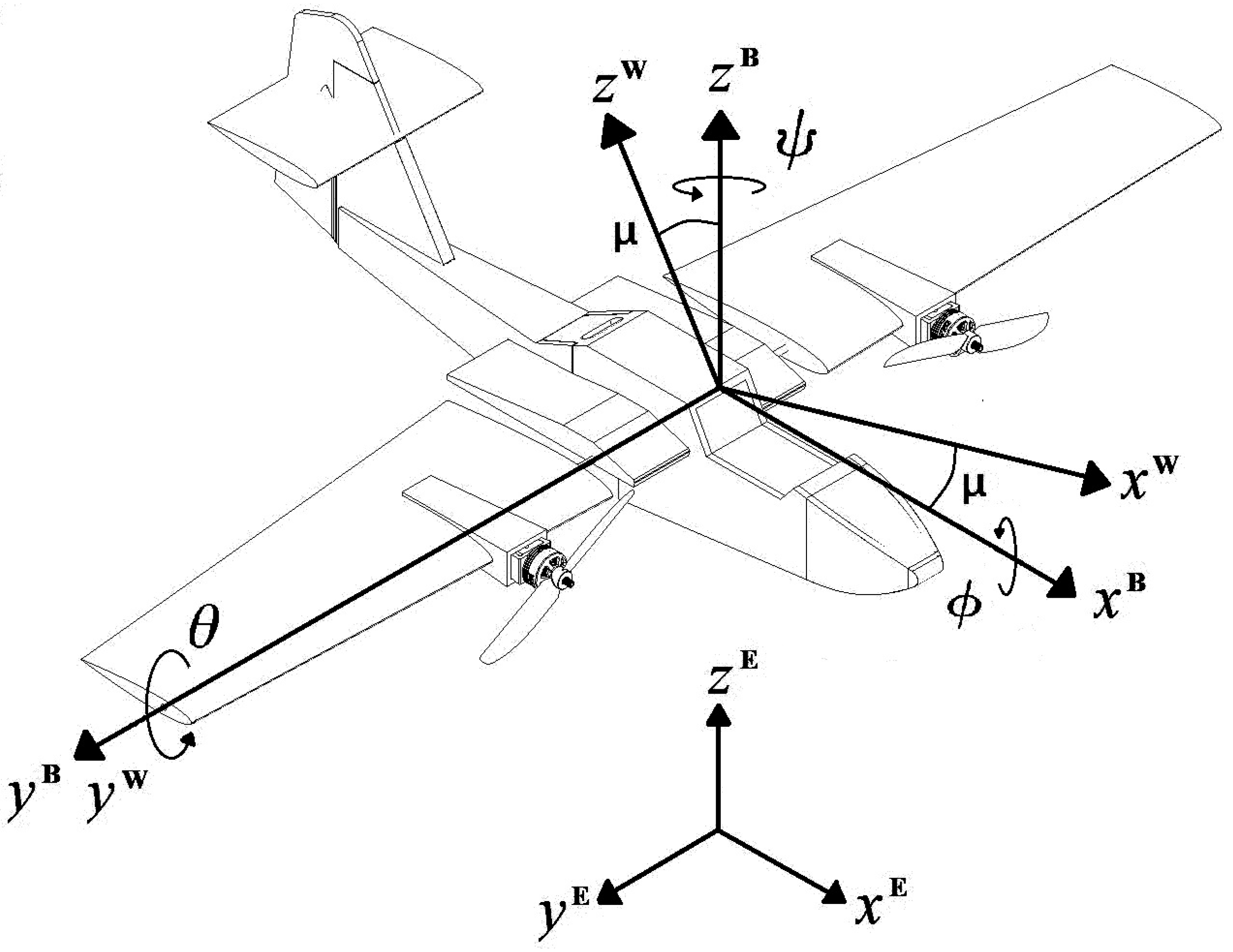
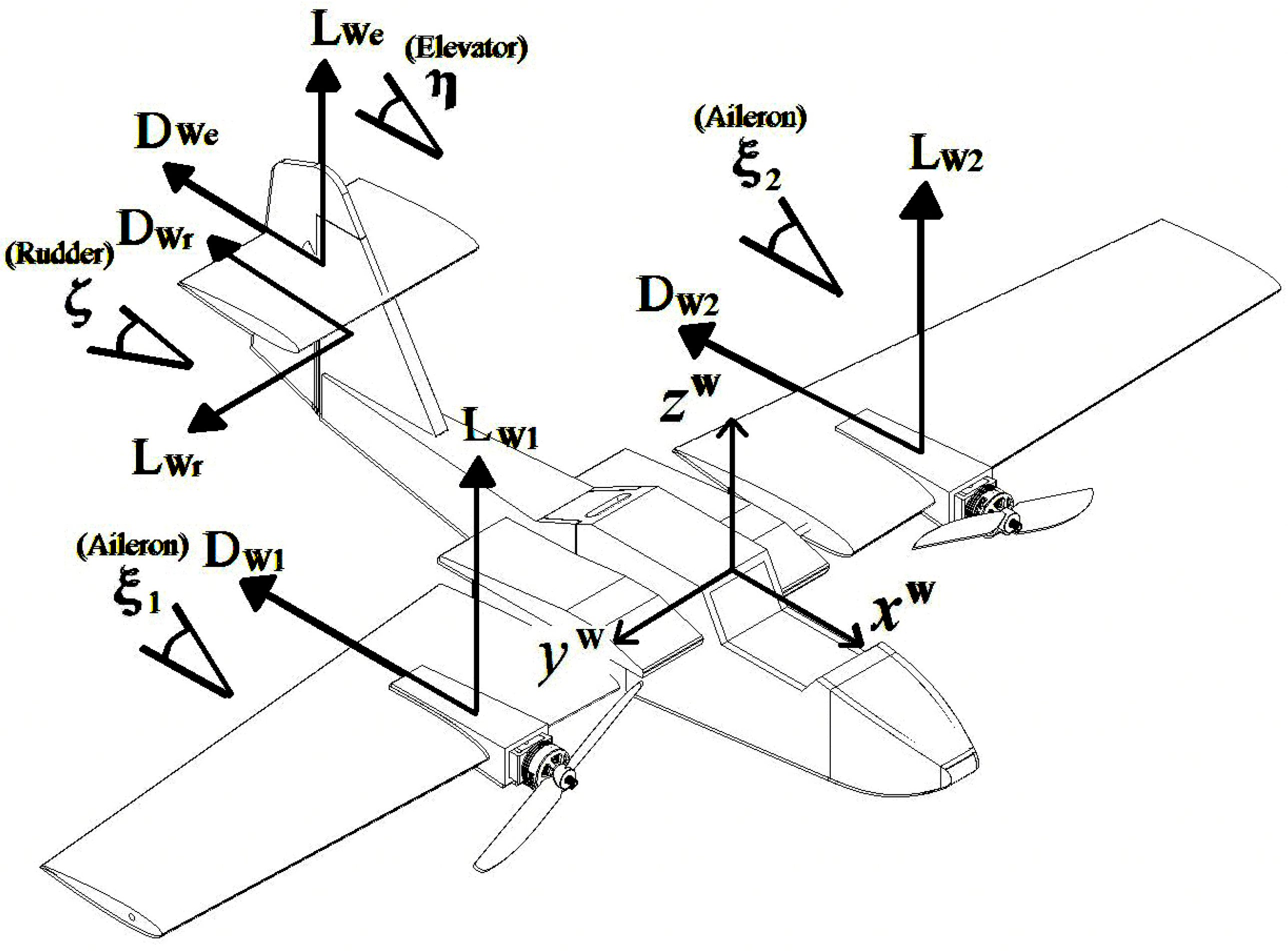
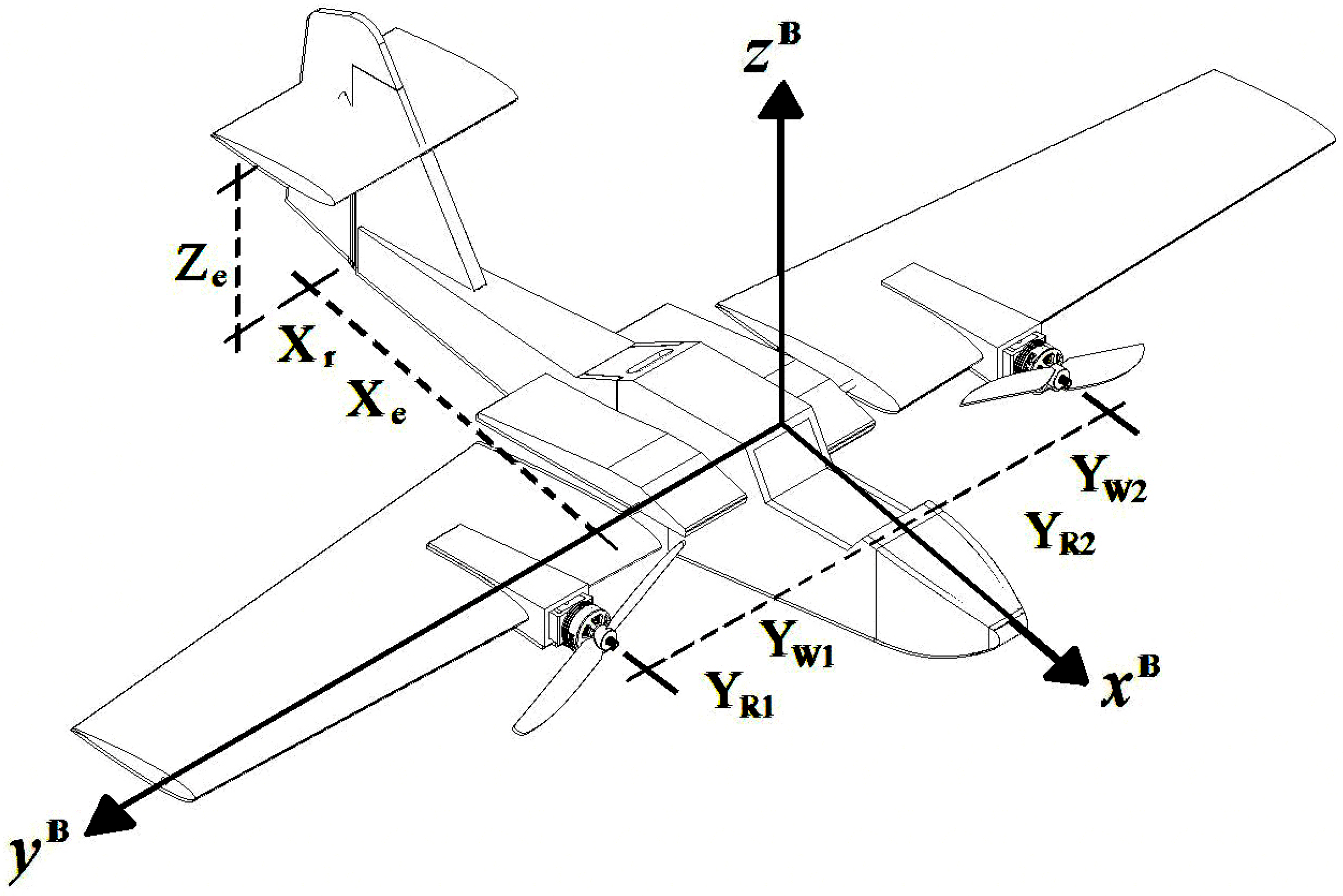
2.1. Equations of Motion
2.1.1. Translational Dynamic
2.1.2. Rotational Dynamic
3. Parameters
3.1. Vehicle Mass
3.2. Inertia Tensor
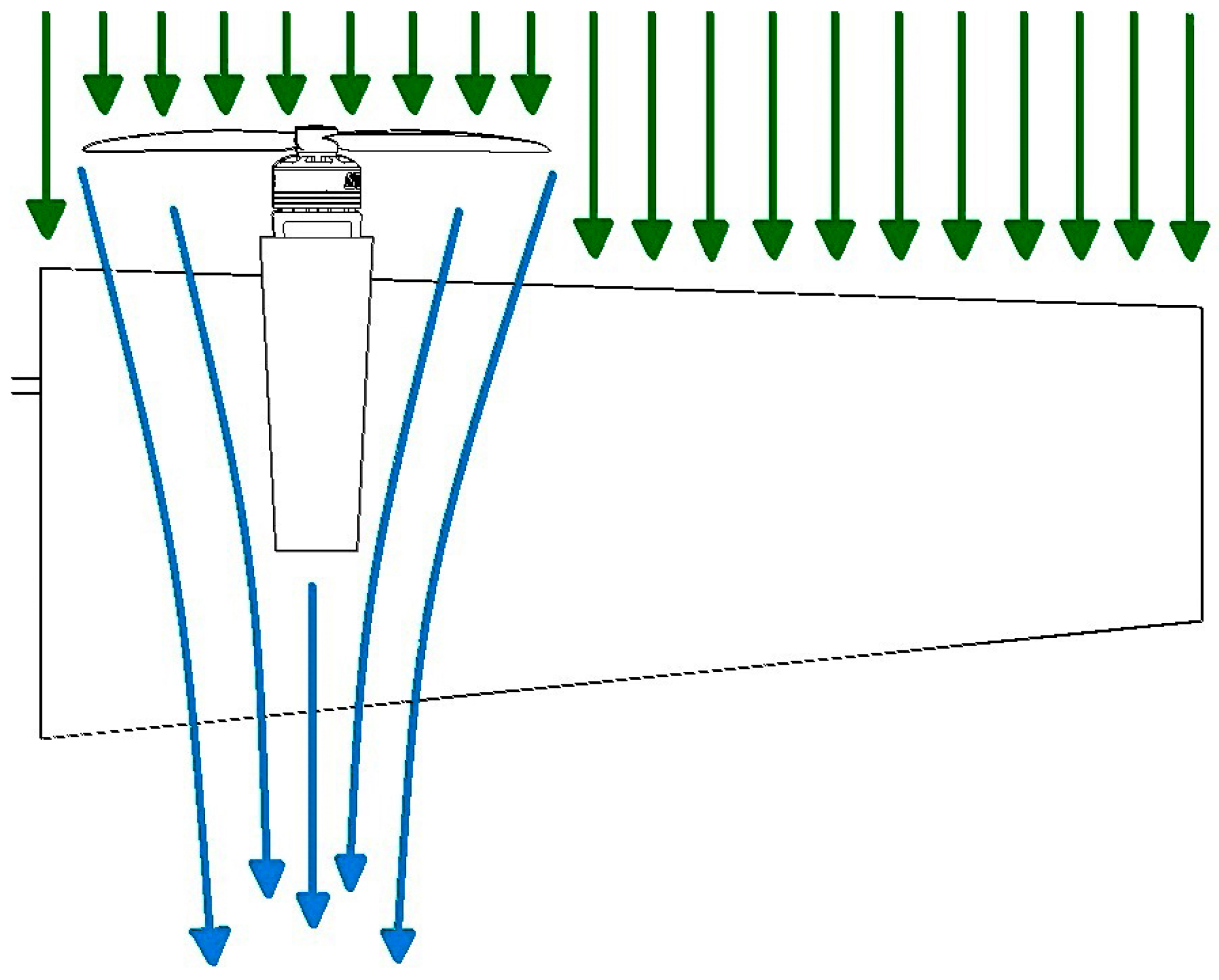
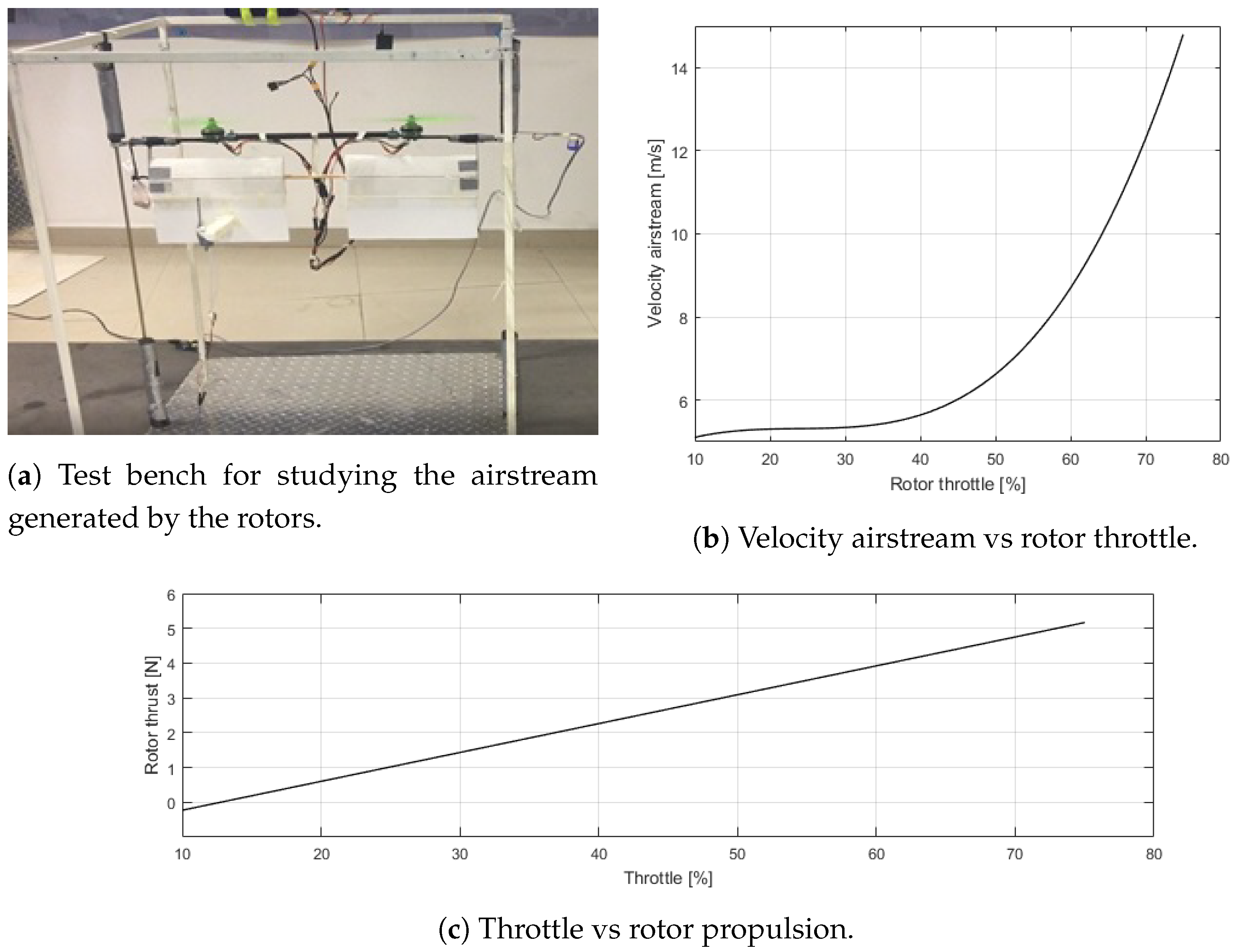
3.3. Aerodynamic Effects
4. Results and Discussion
4.1. Controller Design for Validation
Assumptions
- (A)
- For the vertical flight at , the thrust component is cos() and sin(), that is, the thrust is parallel to the Z-axis.
- (B)
- The x and y displacements are neglected because they are small compared to the z displacement (Altitude).
- (C)
- The wings and horizontal stabilizer do not generate lift forces as a function of the angle of attack (), only as a function of the control surfaces (only ailerons).
- (D)
- The vertical stabilizer does not generate aerodynamic effects.
- (E)
- Since gyroscopic effects on propellers are small enough, they are neglected.
- (F)
- The yaw () and roll () motions are small compared to pitch (), so that and .
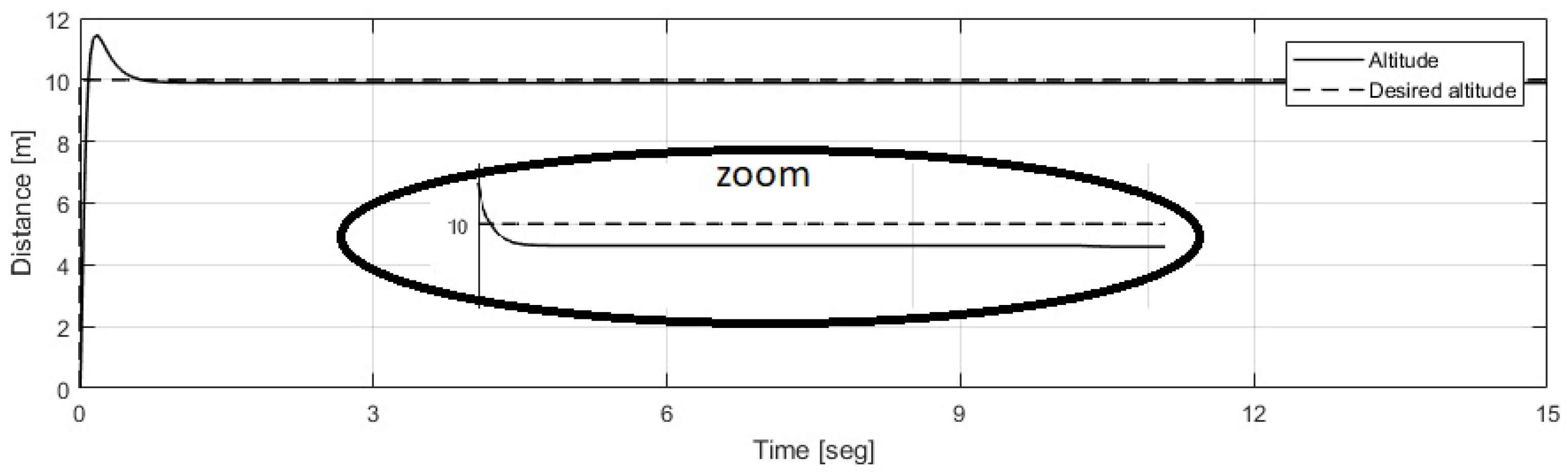
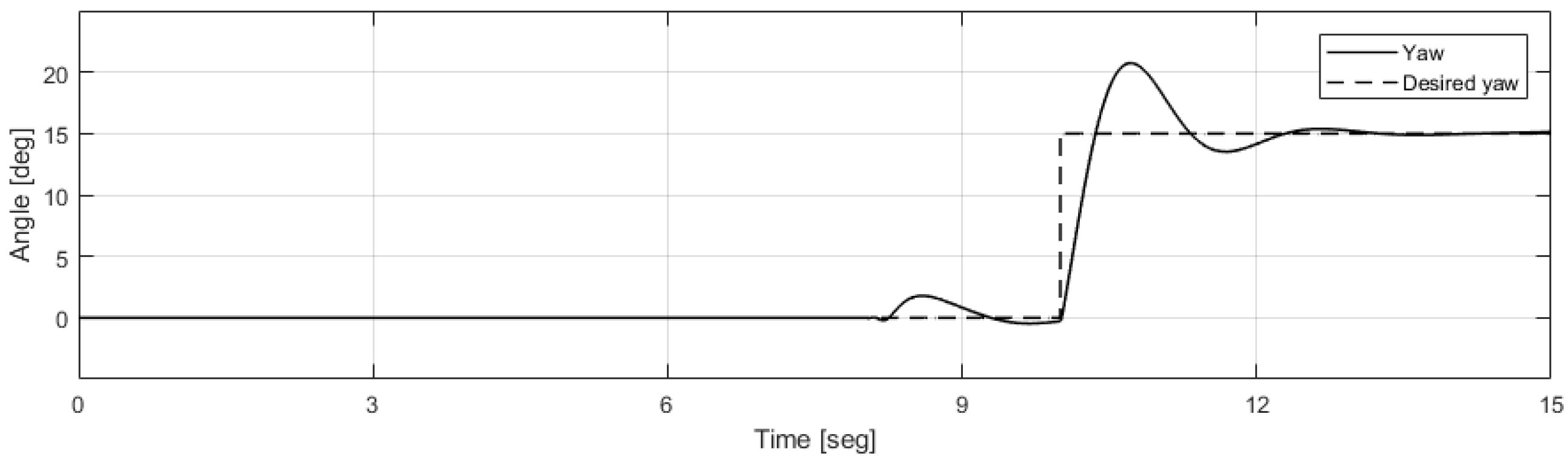
4.2. Simulation
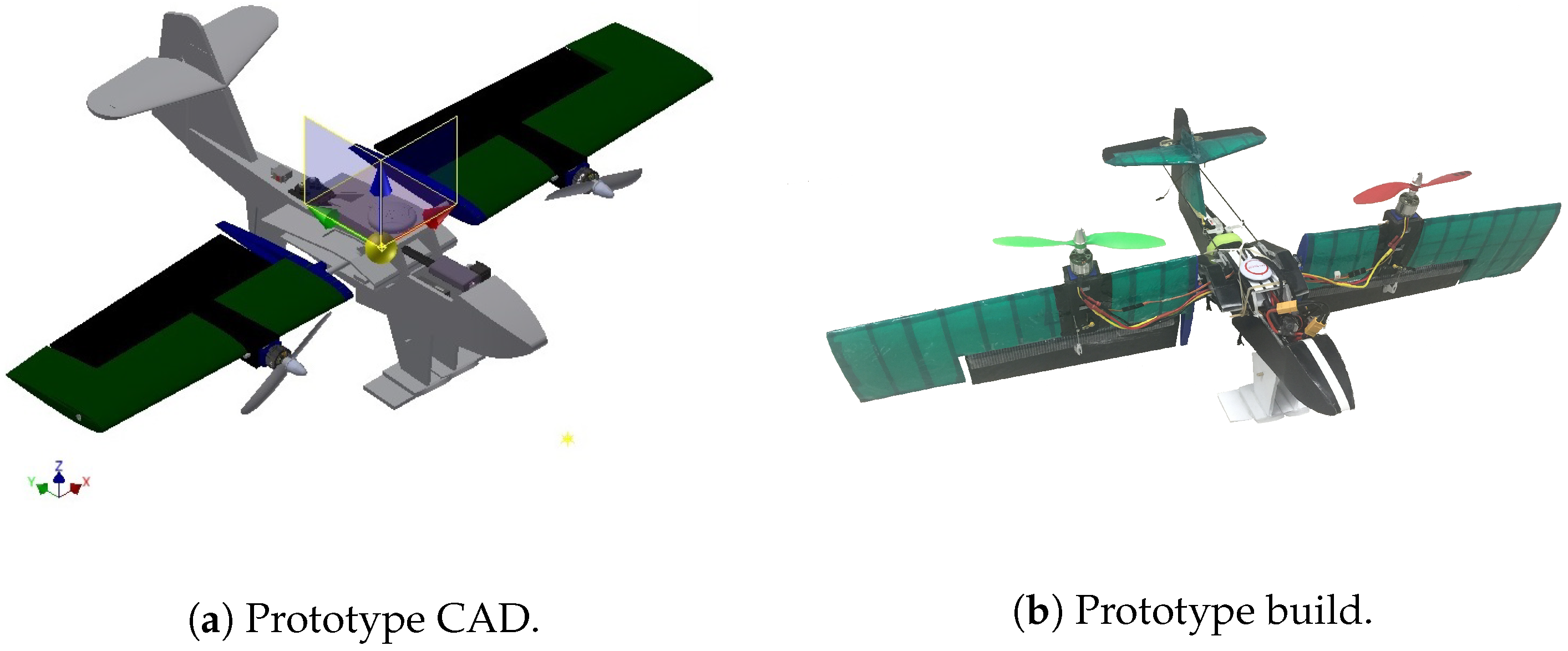
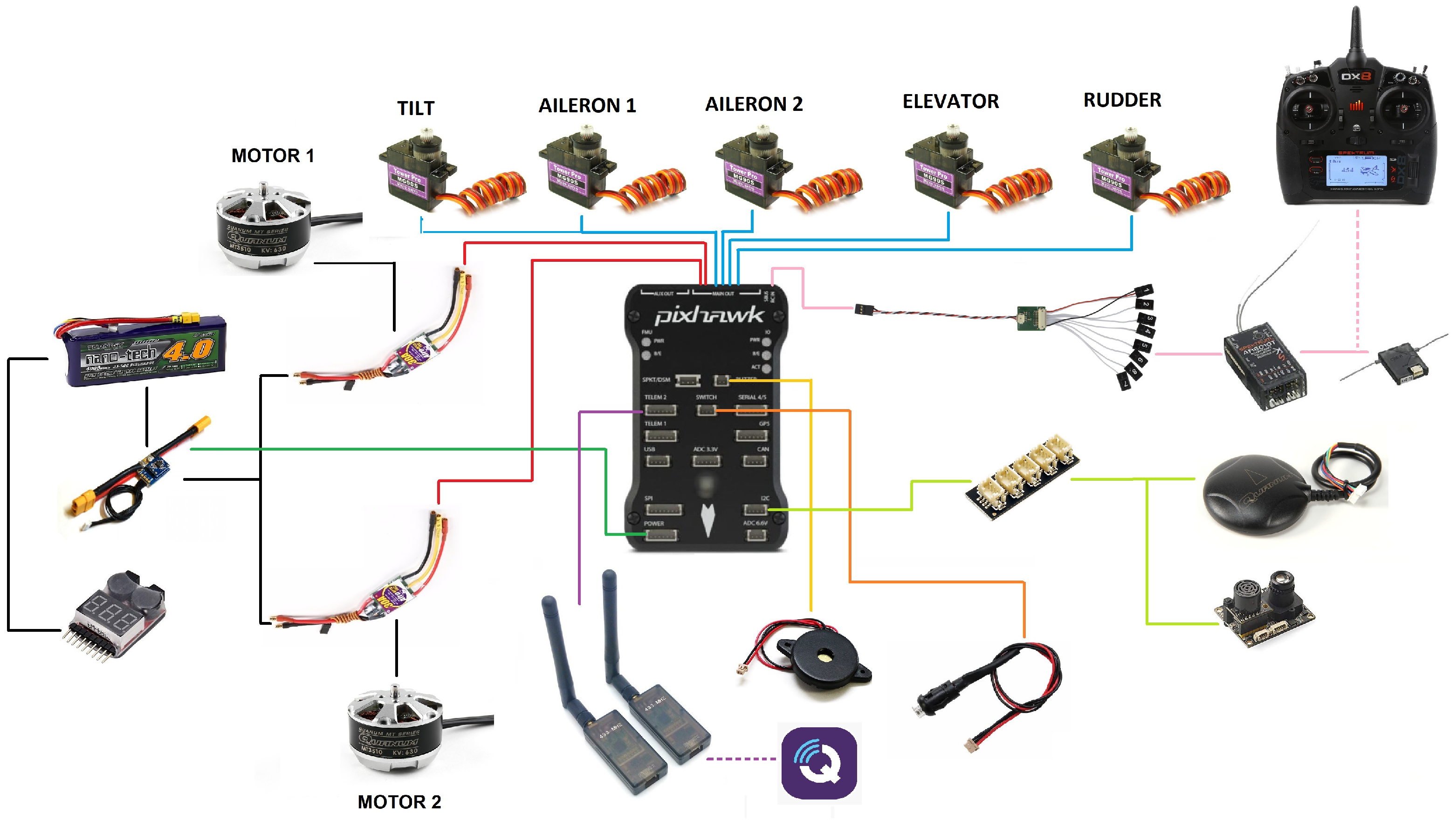
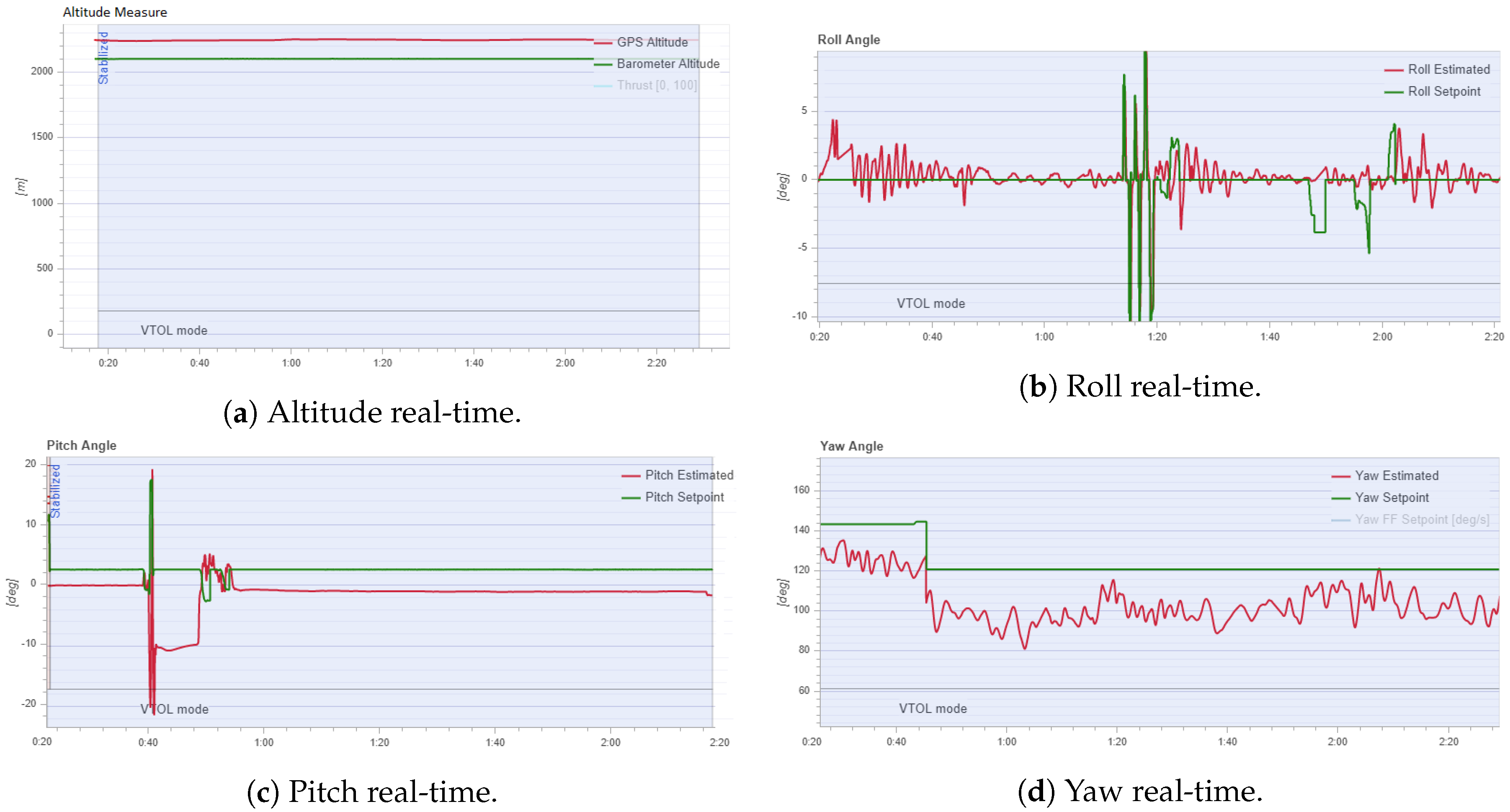
4.3. Flight Test in Real-Time
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lindqvist, A.; Fresk, E.; Nikolakopoulos, G. Optimal Design and Modeling of a Tilt Wing Aircraft. In Proceedings of the 23rd Mediterranean Conference on Control and Automation, Torremolinos, Spain, 16–19 June 2015. [Google Scholar]
- Flores, G.; Escareño, J.; Lozano, R.; Salazar, S. Quad-Tilting Rotor Convertible MAV: Modeling and Real-Time Hover Flight Control. J. Intell. Robot. Syst. 2012, 65, 457–471. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Zhang, J.; Zhang, D.; Shen, L. Control and flight test of a tilt-rotor unmanned aerial vehicle. Int. J. Adv. Robot. Syst. 2017, 14, 1–12. [Google Scholar] [CrossRef]
- Aktas, Y.O.; Ozdemir, U.; Dereli, Y.; Tarhan, A.F.; Cetin, A.; Vuruskan, A.; Yuksek, B.; Cengiz, H.; Basdemir, S.; Ucar, M.; et al. Rapid prototyping of a Fixed-Wing VTOL UAV for Design Testing. J. Intell. Robot. Syst. 2016, 84, 639–664. [Google Scholar] [CrossRef]
- Centinsoy, E.; Sirimoglu, E.; Oner, K.T.; Hancer, C.; Unel, M.; Aksit, M.F.; Kandemir, I.; Gulez, K. Design and development of a tilt-wing UAV. Turk. J. Electr. Eng. Comput. Sci. 2011, 19, 733–741. [Google Scholar]
- Sato, M.; Muraoka, K. Flight Controller Design and Demonstration of Quad-Tilt-Wing Unmanned Aerial Vehicle. J. Guid. Control Dyn. 2015, 38, 1–12. [Google Scholar] [CrossRef]
- Muraoka, K.; Okada, N.; Kubo, D. Quad Tilt Wing VTOL UAV: Aerodynamic Characteristics and Prototype Flight Test. In Proceedings of the AIAA Infotech@Aerospace Conference, Seattle, WA, USA, 6–9 April 2009. [Google Scholar]
- Small, E.; Fresk, E.; Andrikopoulos, G.; Nikolakopoulos, G. Modelling and Control of a Tilt-Wing Unmanned Aerial Vehicle. In Proceedings of the 24th Mediterranean Conference on Control and Automation, Athens, Greece, 21–24 June 2016. [Google Scholar]
- DHL Parcelcopter 3.0. Available online: https://www.dpdhl.com/en/media-relations/specials/dhl-parcelcopter.html (accessed on 10 October 2020).
- Benkhoud, K.; Bouallegue, S. Dynamics modeling and advanced metaheuristics based LQG controller design for a Quad Tilt Wing UAV. Int. J. Dyn. Control 2018, 6, 630–651. [Google Scholar] [CrossRef]
- Masuda, K.; Uchiyama, K. Robust control design for Quad Tilt-wing UAV. Aerospace 2018, 5, 17. [Google Scholar] [CrossRef] [Green Version]
- Cetinsoy, E.; Dikyar, S.; Hancer, C.; Oner, K.T.; Sirimoglu, E.; Unel, M.; Aksit, M.F. Design and construction of a novel quad tilt-wing UAV. Mechatronics 2012, 22, 723–745. [Google Scholar] [CrossRef]
- Garcia, O.; Castillo, P.; Wong, K.C.; Lozano, R. Attitude stabilization with real-time experiments of a tail-sitter aircraft in horizontal flight. J. Intell. Robot. Syst. 2012, 65, 123–136. [Google Scholar] [CrossRef] [Green Version]
- Takeuchi, R.; Watanabe, K.; Nagai, I. Development and control of tilt-wings for a tilt-type Quadrotor. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 6–9 August 2017. [Google Scholar]
- Etkin, B.; Reid, L.D. Dynamics of Flight: Stability and Control, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1996. [Google Scholar]
- Cook, M.V. Flight Dynamics Principles: A Linear Systems Approach to Aircraft Stability and Control, 3rd ed.; Elsevier Ltd.: New York, NY, USA, 2013. [Google Scholar]
- Escareño, J.; Salazar, S.; Lozano, R. Modelling and control of a convertible VTOL aircraft. In Proceedings of the IEEE Conference on Decision & Control, San Diego, CA, USA, 13–15 December 2006. [Google Scholar]
- Abbott, I.H.; Doenhoff, A.E.V. Theory of Wing Sections; Dover Publications, Inc.: New York, NY, USA, 1959. [Google Scholar]
- Anderson, J.D., Jr. Fundamentals of Aerodynamics, 5th ed.; McGraw-Hill: New York, NY, USA, 2011. [Google Scholar]
- Oner, K.T.; Cetinsoy, E.; Sirimoglu, E.; Hancer, C.; Unel, M.; Aksit, M.F.; Gulez, K.; Kandemir, I. Mathematical modeling and vertical flight control of a tilt-wing UAV. Turk. J. Electr. Eng. Comput. Sci. 2012, 20, 149–157. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Propeller thrust | (n = 1, 2) | N |
| Aileron angle | (n = 1, 2) | rad |
| Tilt angle | (n = 1, 2) | rad |
| Parameter | Value | Unit |
|---|---|---|
| m | 1 | kg |
| g | 9.80665 | m/s2 |
| 0.024 | Kg·m2 | |
| 0.010 | Kg·m2 | |
| 0.033 | Kg·m2 | |
| 0.25 | m | |
| 0.25 | m | |
| 1.225 | Kg/m3 | |
| S | 0.08 | m2 |
| Parameter | Value | Unit | |
|---|---|---|---|
| Velocity initial | m/s | ||
| Angular velocity initial | rad/s | ||
| Attitude initial | rad | ||
| Target position | (Time ≤ 3 s) | m | |
| (Time = 5 s) | rad | ||
| (Time = 8 s) | rad | ||
| (Time = 10 s) | rad |
| K | Roll | Pitch | Yaw | Altitude |
|---|---|---|---|---|
| 0.21 | 0.21 | 0.4 | 100 | |
| 0.055 | 0.105 | 0.09 | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanchez-Rivera, L.M.; Lozano, R.; Arias-Montano, A. Development, Modeling and Control of a Dual Tilt-Wing UAV in Vertical Flight. Drones 2020, 4, 71. https://doi.org/10.3390/drones4040071
Sanchez-Rivera LM, Lozano R, Arias-Montano A. Development, Modeling and Control of a Dual Tilt-Wing UAV in Vertical Flight. Drones. 2020; 4(4):71. https://doi.org/10.3390/drones4040071
Chicago/Turabian StyleSanchez-Rivera, Luz M., Rogelio Lozano, and Alfredo Arias-Montano. 2020. "Development, Modeling and Control of a Dual Tilt-Wing UAV in Vertical Flight" Drones 4, no. 4: 71. https://doi.org/10.3390/drones4040071
APA StyleSanchez-Rivera, L. M., Lozano, R., & Arias-Montano, A. (2020). Development, Modeling and Control of a Dual Tilt-Wing UAV in Vertical Flight. Drones, 4(4), 71. https://doi.org/10.3390/drones4040071