1. Introduction
Wildland fires are an important threat in rural and protected areas. Their control and mitigation are difficult as they can quickly spread to their surroundings, potentially burning large land areas and getting close to urban areas and cities. The occurrence of wildland fires results into substantial costs to the economy, ecosystems and climate [
1]. Nevertheless, their frequency is on the rise. In fact, there has been an increase in the intensity and frequency of wildland fires in comparison to the past 10,000 years [
2]. In the western U.S. alone, wildland fires increased by 400% in the last decades [
3,
4]. In 2018, 8.8 million acres (35,612.34 km
2) were burned by more than 58,083 wildland fires in the U.S. [
5]. In Northern California, a single fire, known as “Camp Fire”, ended up killing 85 people. This fire was the most destructive in California history burning 153,336 acres (620.53 km
2) and destroying 18,733 structures. Losses were estimated to
$16.5 billion [
3]. Experts estimate that wildland fires will increase in the coming years mainly as a result of climate change [
6].
With wildland fires being a multifaceted issue, many different elements are relevant to the efforts to reduce their impact. Aspects such as meteorology, drought monitoring, vegetation status monitoring can help the prevention and the preparation to wildland fires. Other aspects such as fire suppression actions and post-fire recovery strategies must also be taken into account after the appearance of fire. Many of these aspects have been studied with unmanned aerial vehicles (UAVs). However, in the literature, two elements seem more prominent in relation to UAVs. First, the time span between the start of a fire and the arrival of firefighters. This response time needs to be reduced to a minimum in order to decrease the chances of the fire spreading to unmanageable levels. The second key element is the evaluation of the extent of the event and the monitoring of the emergency response. As manual wildland fire assessment is rendered difficult by several factors (e.g., limited visibility), the consideration of this aspect is necessary in order to elaborate better fighting strategies. These two key elements can only be properly addressed through the development of reliable and efficient systems for early stage fire detection and monitoring. As a result of this need, interest has grown in the research community and led to a large number of publications on the subject.
Remote sensing has been widely researched in the field as it allows the observation of wildland fire events without unnecessarily exposing humans to dangerous activities. For instance, satellite images have been used to report the fire risks [
7] and the detection of active fires [
8,
9]. Wireless sensor networks (WSNs) have also been proposed for wildland fire detection [
10], monitoring [
11] and risk assessment [
12]. However, both types of systems have practical limitations. Satellite imagery has limited resolution. Therefore, the data relevant to an area are often averaged and constrained to a single-pixel making it difficult to detect small fires [
13]. Furthermore, satellites have limited ground coverage and necessitate a significant amount of time before being able to resurvey the same region. Limited precision and the lack of real-time data reporting are therefore rendering satellite imagery unsuitable for continuous monitoring. As for WSNs, they operate as an infrastructure that needs to be deployed beforehand. As the sensors are installed in the forest, their coverage and resolution are proportional to the investment that is made in their acquisition and deployment. Moreover, in the event of a fire, the sensors are destroyed, leading to additional replacement costs. Maintenance difficulties, the lack of power independence and the fact that they are not scalable due to their static nature are all factors known to limit their coverage and effectiveness [
14]. As a result of the previous systems’ shortcomings, unmanned aerial vehicles (UAVs) have been proposed as a more convenient technology for this task. Their maneuverability, autonomy, easy deployment and relatively low cost are all attributes that made UAV the technology of choice for future wildland fire management efforts.
UAV technologies have seen an important progression in the last decade and they are now used in a wide range of applications. UAV has become smaller, more affordable and now have better computation capabilities than in the past making them reliable tools for remote sensing missions in hostile environments [
15]. Furthermore, UAVs can fly or hover over specific zones to retrieve relevant data in real time with cameras or other airborne sensors. As a result, research has shown their benefits for surveillance and monitoring of wildland fire as well as tasks related to post-fire damage evaluation [
16,
17,
18,
19,
20]. Additionally, UAVs have exhibited a positive economic balance in favor of their use in wildland fire emergencies [
21,
22]. This makes UAVs both a practical and an economical solution. Therefore, research efforts have been oriented towards the development of frameworks and techniques using UAVs with the goal of delivering optimal fire detection, coverage and firefighting.
The subject of this paper is a summarization of the literature pertaining to use of UAVs in the context of wildland fires. Research in this area revolve more predominantly around fire detection and monitoring, therefore the core of this review will be concentrated on technologies and approaches aimed at tackling these challenges. However, this paper also touches on other subjects when relevant such as fire prognosis and firefighting but less extensively as fewer works are available on the subject in the literature. The only other related works believed to exist are the work of Yuan et al. [
19] and Bailon-Ruiz and Lacroix [
23]. Yuan et al. [
19] touch on subjects such as UAV wildland fire monitoring, detection, fighting, diagnosis and prognosis, image vibration elimination and cooperative control of UAVs. While the subject of this work overlaps with ours, it was performed 5 years ago and since then a lot of research has been produced on the subject. In fact, most of the papers reviewed have been published in 2015 or after and are not present in Yuan et al. [
19]. Therefore, this work is much more current than Yuan et al. [
19]. Bailon-Ruiz and Lacroix [
23] have been published in 2020, and are therefore much more current. The authors discuss two components of the field of UAV wildfire remote sensing: system architecture (single UAV or multiple UAV) and autonomy level. The reviewed works are characterized by similar attributes (mission types, decision level, collaboration level, fielded) and include unique attributes such as information processing and airframe, while this paper also analyzes unique attributes such as sensing mode and coordination. Attributes such as information processing and airframe indicate that Bailon-Ruiz and Lacroix [
23] put more focus on the type of UAV and the software that runs on it while this paper is focusing on sensing and communication. The most notable difference between both works is the depth of analysis of the reviewed works and the extent of the reviewed literature. While Bailon-Ruiz and Lacroix [
23] discusses system architecture and autonomy level only, this paper discusses these topics as well as sensing instruments, fire detection and segmentation, available fire datasets, fire geolocation and modeling and UAV-unmanned ground vehicles (UGV) systems for wildfires. This paper also reviews more recent works (16 vs. 10 published in 2015 or after), more works in total (27 vs. 19), and this paper’s reference count is more than three times higher (121 vs. 35) indicating a more in-depth discussion of concepts related to the reviewed works which in turn requires more referencing. Following these observations, it is believed that this paper is a significant contribution and is very relevant to the field.
The final goal of this review is to provide insight into the field towards the development of cooperative autonomous systems for wildland fires. Observations made after evolving for many years in the field indicate that the research community has provided many pieces of the solution to the problems that are wildland fires. However, these pieces, especially recent ones, often fail to come together in a unified framework to form a multifaceted solution to the underlying issue. A lot more could be accomplished by combining fire detection, monitoring, prognosis and firefighting under the same system. Therefore, this paper reviews fire assistance components, sensing modalities, fire perception approaches, relevant datasets and UAV/UGV coordination and cooperation strategies. In fact, this paper’s review approach is to break apart the reviewed works in these categories instead of discussing all the aspects of a reviewed work in the same paragraph. The idea is to bring existing approaches into light in such a way that it would be easier in the future to combine them into more complete systems instead of seeing them as individual systems. These subjects lead to the last section of this paper where cooperative autonomous systems are discussed and where all previously discussed technologies come together under the umbrella of a single framework.
2. Fire Assistance
Remote sensing with aerial systems presents multiple advantages in the context of emergency assistance. Their high maneuverability allows them to dynamically survey a region, follow a defined path or navigate autonomously. The wide range of sensors that can be loaded onboard allows the capture of important data which can be used to monitor the situation of interest and plan an emergency response. The ability to remotely control UAVs helps reduce the risk for humans and remove them from life-threatening tasks. The automation of maneuvers, planning and other mission-related tasks through a computer interface improves distant surveillance and monitoring. Advances in these aspects have a direct impact on the firefighting resource management.
UAV fire assistance systems in the literature can be characterized using four attributes: sensing modalities and instruments, type of task performed, coordination strategies with multiple UAVs or with the ground control station (GCS) and the approach to experimental validation.
Figure 1 is a visual representation of these characteristics and their implementation in the reviewed works. These components are designed to perform one or more tasks related to fire emergencies. Within the reviewed works, the most prevalent tasks are the fire detection and monitoring. Fire prognosis and firefighting are also present in some works, but have received less interest from researchers. Fire detection and monitoring is based on recognition techniques, a field of research that has seen significant advances in the last decades. Meanwhile, fire prognosis and fighting has practical limitations that hinder research on the subject hence the imbalance in the research interest. Prognosis requires complex mathematical models that must be fed with data that can be difficult to acquire in real time and in unknown environments. Fire fighting, on the other hand, requires expensive combat equipment that is even more expensive for large wildland fires. Moreover, close proximity with fires can pose a significant risk for the vehicle integrity and lead to its loss. However, some initial research has been done to design a UAV capable of fighting fires [
24,
25,
26] and more recently some drone manufacturers have steeped in to tackle this problem as well [
27]. It is clear that more work remains to be done for these vehicles to be affordable and technically viable.
One key component of an airborne fire assistance system is the type of UAV used. UAVs have different sizes, maneuverability and endurance capacities. These characteristics in themselves have a strong influence on the overall architecture of the system. There is a wide selection of aerial systems ranging from large UAVs with long endurance and high-processing capabilities to small UAVs with short flight times and limited processing capabilities [
28,
29]. Large vehicles are expensive but have higher payload and can carry more sensors and other instruments. On the other hand, smaller vehicles are more affordable but with limited payload. The instruments onboard the vehicles vary between the reviewed systems, but some are essential to navigation and localization and therefore found in almost all UAVs. Global Navigation Satellite System (GNSS) and Inertial Navigation System (INS) fall into this last category. Furthermore, almost all of the vehicles in the reviewed works have at least one kind of imagery sensor used for different purposes including fire perception. Temperature sensors are also present in some of the proposed fire assistance systems, but as shown in
Section 3, they are less common.
Sensor measurements are the inputs of fire perception algorithms that process the data to detect the presence of the fire. The processing can be performed either onboard the UAV or by a computer located at a GCS. Fire perception can also, in some cases, be performed by a human operator inspecting the data from a GCS. It seems that a lot of efforts in research are devoted to the automation of fire perception and the optimization of the processing while at the same time preserving the accuracy of the overall system. Computer vision and machine learning techniques are commonly used for this purpose.
The last component fire assistance systems is the coordination strategy, it provides the framework for the deployment of the flight missions. Surveillance missions are usually planned beforehand and aim to search wide areas, prioritizing areas with higher fire risks. These missions can be accomplished by humans manually operating UAVs or autonomously. The coordination strategy in itself becomes more critical during the monitoring of a fire propagation as it is necessary to adapt the flight plan to the fire spread. This is even more relevant if there are multiple UAVs collaborating to the mission during a fire emergency. For this purpose, multiple coordination strategies were proposed in the literature.
For example, a UAV could hover near a fire spot and alert the rest of the fleet to proceed with fire confirmation [
30]. More complex planning is also possible, by requiring a consensus on the task to be performed by each unit [
31] or by flying in a specific formation around the fire perimeter [
32]. In both cases, a concrete description of the task and the autonomous decision scheme must be defined for the system to be effective.
Section 7 gives more details about the coordination strategies using a single or multiple UAVs.
Table 1,
Table 2 and
Table 3 present an overview of the reviewed fire assistance systems.
Table 1 contains the year of publication and the validation process used by the authors.
Table 2 presents the sensing modalities used to perform fire perception and the tasks performed. Note that some of the works do not specify sensing instruments and the authors assume that the necessary instruments are available onboard the UAV.
Table 3 contains the level of autonomy, the organization of the system and the coordination strategy. Not that in some works the system is only theorized and many assumptions are made and some information might not be specified as it is not relevant to the central subject of the work. This is especially the case with works validated in simulations that do not always define a specific hardware platform.
4. Fire Detection and Segmentation
Research has shown the effectiveness of UAVs as a remote sensing tool in firefighting scenarios [
17,
18,
43]. They are very useful even in simple tasks such as observing the fire from a static position and streaming the video sequence to human operators. This simple use case already allows firefighters to have an aerial view of the spreading fire and plan containment measures. However, single man-controlled UAVs, even if they are useful for small emergencies, do not scale up in large scenarios. Therefore, the automation of the detection and the monitoring of fires can help deliver an optimal coverage of the fire area with the help of multiple UAVs and with less human intervention. Furthermore, the gathered data can later be processed to analyze the fire, estimate its Rate of Spread (ROS) [
69], volume [
40] or perform post fire damage evaluation [
17].
To perform fire-related tasks autonomously, systems must address different subtasks such as fire geolocation, fire modeling and even path planning and coordination between UAVs. For that purpose, sensor data are often initially processed to detect fire and extract fire-related measures. The derived information is then passed on to the different subsystems. For fire detection, authors are usually able to directly extract fire-like pixels based on color cues or IR intensities and do not require further analysis. However, monitoring tasks usually require further analysis to estimate the fire perimeter or burned areas. In that context, computed measures (e.g., segmentation) are provided as input to fire models to estimate the fire propagation over time.
This section reviews some fire detection and segmentation techniques found in the literature.
4.1. Fire Segmentation
Fire segmentation is the process of extracting pixels corresponding to fire in an image. The criteria by which a pixel is selected vary from one method to another. The selection criteria are also the main factor affecting the accuracy of the detection. In general, fire segmentation uses the pixel values of a visual spectrum image (e.g., color space segmentation) or the intensities of an IR image. Motion segmentation can also be used to extract the fire using its movement over a sequence of images.
4.1.1. Color Segmentation
Images are built of pixel units that can have different encoding (e.g., grayscale, color). In color images, pixels are composed of three values in the red, green and blue channels (RGB). Other color spaces are also possible such as YCbCr, HSI, CIELAB, YUV, etc. [
70]. In IR images the pixels have one channel value representing temperature (MWIR and LWIR) or reflectance (NIR, SWIR).
In the COMETS project [
30,
34,
35], the authors employed a lookup table with fire-like colors (RGB values) that were extracted from a learned fire color histogram. The image pixels were compared to the table and the values that were not found were considered as non-fire. A non-calibrated LWIR camera is used to capture qualitative images with radiation values relative to the overall temperature of the objects in the scene. The heat peak observed in the resulting image depends on the current scenario. A training process was carried out to learn the thresholds to be applied to the IR images for binarization. Images with and without fires were considered as well as different lighting conditions and backgrounds. This permitted the selection of the appropriate threshold to apply during deployment in known conditions. Ambrosia et al. [
17] selected fixed thresholds for each IR spectral band. They also varied the bands used for day-and-night missions. During night-time, the MWIR and LWIR bands were used and during the day, the NIR band was added. The results show that fixed threshold adapts poorly to unexpected conditions but can be tuned to perform better in known environments.
Yuan et al. [
49,
50,
51,
52,
53] used color space segmentation. The images are converted from RGB to the CIELAB color space before further processing. Sun et al. [
48] proposed the use of YCbCr color space. In both cases, a set of rules were developed based on empirical calculations performed on captured fire images. For example, Sun et al. [
48] considered pixels as fires if their values followed the following rules:
,
,
,
and
. The mean sub-index indicates the channel mean value of the corresponding image. Otsu thresholding technique [
71] was used in [
49] to segment IR images.
Color value rule-based segmentation approaches are computationally efficient, but lack robustness during detection. Results show that objects with a color similar to fire are often mislabeled as fire and trigger false alarms. A combination of rules in different color spaces and the addition of IR can increase the detection accuracy. More complex algorithms that are time and space aware have also been shown to increase the accuracy of the fire detection [
72,
73,
74,
75,
76,
77,
78,
79,
80,
81,
82]. The majority of them have not been integrated with UAVs.
In recent years, deep learning algorithms have shown impressive results in different areas. Relating to UAVs, past work using deep convolutional neural networks (CNN) dealt mainly with fire detection [
56,
83,
84]. Deep fire segmentation techniques proposed recently have shown the potential of developing an efficient wildland fire segmentation system [
85]. The used dataset in this last work included some aerial wildland fire images [
86]. Deep segmentation of wildland fires is still lacking in UAV applications.
4.1.2. Motion Segmentation
Fire segmentation using static images help reduce the search space, but often objects with a similar color to fire can be detected and lead to false positives. Yuan et al. [
49,
50,
51,
52,
53] and Sun et al. [
48] proposed the use of Lukas-Kanade optical flow algorithm [
87] to consider fire movements. With the detection of corresponding feature points in consecutive image frames, a relative motion vector can be computed. The mean motion vector matches the UAV’s motion except for moving objects in the ground. Fire flames are among those objects because of their random motion. By detecting feature points within regions with both random movements and fire-like colors, the fire can be confirmed and the false alarm rate reduced.
4.2. Fire Detection and Features Extraction
The data fed to a detection system are analyzed in order to find patterns that confirm the occurrence of an event. Patterns are recognized by computing different features which can be strong or weak signatures for a specific application. In the case of fire detection with UAVs, the most popular features are color, brightness and motion. Research focusing on fire detection considers the fusion of more features to obtain better results in the classification stage. These features can be categorized by the level of abstraction at which they are extracted: pixel, spatial and temporal.
Color cues are widely used in the first step to extract fire-like pixels. This reduces the search space for further processing with more computationally expensive detection algorithms. For example, the RGB mean values of a Region of Interest (RoI) and the absolute color differences (
,
,
) can be thresholded [
88] or used to train a classification algorithm [
89]. In the work of Duong and Tinh [
90], the authors further added the intensity mean, the variance and the entropy values of the ROI to the feature vector. Other features used in the literature include color histograms of ROI [
75] and color spatial dispersion measures [
73].
After the detection of the ROI, other features can be extracted. Some authors consider spatial characteristics to determine the fire perimeter complexity by relating the convex hull to the perimeter ratio and the bounding rectangle to perimeter ratio [
91]. The distance between the blob centroid position within the bounding box has also been considered in this work.
Texture is another spatial characteristic often used for fire detection. The main texture descriptors proposed for this task are Local Binary Patterns (LBP) [
92,
93,
94,
95] and Speeded Up Robust Features (SURF) [
75,
78]. These operators characterize local spatial changes in intensity or color in an image and return a feature vector that can be used as input for classification. SURF [
96] is computationally expensive but allows for scale and rotation invariant matching. LBP [
97] needs less processing power and extracts the mean relation between pixels in a small area using the 8 neighbors of a pixel. Some authors [
98,
99] also used the Harris corner detector [
100], which is a computationally efficient feature point extractor.
Deep learning is another approach that has been used for fire detecting. It allows the automatic learning of low- and high-level features instead of hand crafting them as it was the case with the previous approaches described. Zhao et al. [
56] developed such an approach in the form of a 15-layer CNN called Fire_Net. The proposed architecture is inspired by AlexNet [
101] and is made of a succession of convolutions, ReLUs and max poolings that end with a fully connected layer followed by a softmax layer. The approach is able to classify image patches as fire or not fire with a 98% accuracy outperforming many other similar deep learning or learning-based approaches tested by the authors on the same data. Jiao et al. [
60,
61] also proposed a deep learning approach but based on the YOLOv3 architecture [
102]. The solution is an object detection approach able to provide bounding boxes around objects of interest. In this case, the network is trained on 3 classes: smoke, fire and combination of smoke and fire. Initially, the authors used a YOLOv3-tiny architecture and on-board computations. The system was able to reach a precision of 83% and a frame rate of 3 to 6 fps [
60]. In a more recent contribution [
61], the same authors were able to reach a detection precision of 91% and a frame rate of over 80 fps by performing the computation on a GPU located in the GSC instead.
The features reviewed above are extracted from single images. When a video sequence is available, the temporal variation in color, shape and position of some blobs can be extracted. In the work of Ko et al. [
103], the fire blob shape variation is computed by a skewness measure of the distance from the perimeter points to the blob’s centroid. Foggia et al. [
104] measured shape changes by computing the perimeter to area ratio variation over multiple frames. The authors also detected the blob movements by matching them in contiguous frames and to compute the centroid displacement. Fire tends to move slowly upwards, thus blobs that do not comply with this rule can be discarded [
72,
103,
105]. The centroid displacement can also be an input for further classification [
72,
91,
106]. A similarity evaluation is employed by Zhou et al. [
91]. They measure the rate of change of overlapping areas of blobs in contiguous frames. This gives a practical representation of the speed at which the region of interest is moving and if it is growing or decreasing in size. Fire flickering can also be identified by considering specific measures such as intensity variation [
107], the number of high-pass zero crossing in the wavelet transform [
108] or the number of changes from fire to non-fire pixels inside a region [
109]. Wang et al. [
110] implemented a long-term movement gradient histogram, which accumulates the motion changes. The histogram is fitted to a curve which is used to evaluate if the area corresponds to a fire or not. Kim and Kim [
111] proposed a Brownian motion estimator that measures the correlation of two random vectors [
112]. The vectors are composed of channel values, the first intensity derivative and the second intensity derivative. Therefore, the Brownian motion estimator describes the dynamic dependence between a series of regions across multiple frames. Temporal features consider a time window for the fire evaluation. Then, some empirical criteria are established to determine the optimal thresholds and duration of the events in order to trigger a fire alarm.
Among the features described so far, there are some features that are more oriented towards fire detection. Features such as color, blob centroid displacement and flickering are some of the most popular. Some novel approaches such as the Brownian correlation or the histogram of gradients have been less explored but are nevertheless interesting. A comparison of these different features and an evaluation of which one has a greater impact on the fire detection accuracy and false positive rate would be very useful. Unfortunately, such a comprehensive comparison does not seem to have been published yet. However, as most of these features are not computationally expensive, ensembling the features can improve the performance and reduce the false detection rate.
Table 5 gives an overview of the features used depending on the input.
4.3. Considerations in UAV Applications
Additional features can improve the fire detection. Features that are obtained by temporal analysis evaluate the difference between contiguous frames. In simple scenarios, where the camera is static and the background is not complex, frame subtractions can help detect moving pixels. In the presence of complex and dynamic backgrounds, Gaussian mixture models and other sophisticated background modeling techniques can be considered.
However, the video streams from UAVs have fast motions and no classical background subtraction method would give satisfying results because of the assumption of a static camera. Even in a situation where the UAV is hovering over a fixed position, the images are still affected by wind turbulence and vibrations. Therefore, in order to be able to apply these motion analysis techniques, it is necessary to consider image alignment and video stabilization. The usual approach is to find strong feature points that can be tracked over a sequence of frames. Merino et al. [
44], in their fire assistance system, used a motion estimation approach based on feature points matching known as sparse motion field. From the matched points, they estimate a homography matrix that maps the pixels in an image with the pixels in the previous frame. This allows mapping every image to a common coordinated frame for alignment. SURF [
96] and ORB [
113] are two feature point methods that were used for extracting salient features prior to the image alignment. It seems that the impacts and the benefits of the image alignment have not yet been addressed in the literature relating to fire and smoke detection but some researchers such as [
44] consider it important for their fire assistance system to work properly.
5. Wildland Fire Datasets
A large number of fire detection approaches use a classification method that relies on learning algorithms. The main challenges of machine learning is to build or to find a large enough dataset with low bias. Such a dataset should contain positive examples with high feature variance and negative examples consisting of standard and challenging samples.
Deep learning techniques need even larger datasets for training. Data augmentation techniques can help in this regard but it requires a sufficiently large dataset to start. Well-developed research fields such as face or object recognition have already large datasets that have been built and vetted by the community. These datasets are considered suitable for the development and benchmarking of the new algorithms in their respective fields. In the case of fire detection, no such widely employed dataset is available yet. Some effort has been made toward this direction. Steffens et al. [
114] captured a set of 24 videos from hand-held cameras and robot mounted cameras. The ground-truth was defined by bounding boxes around the fire. Foggia et al. [
104] compiled a collection of 29 videos of fire and smoke but did not provide ground-truth data. Chino et al. [
93] gathered around 180 fire images to test their BowFire algorithm and made the dataset available with manually segmented binary images representing the ground-truth for the fire area. However, the main problem with these datasets is the lack of wildland fire samples. This could be problematic for the development of a fire detection module for wildland fire assistance systems. Aerial fire samples in the form of videos are also necessary for the development of UA-based systems.
In [
86], the authors collected images and videos to build the Corsican fire database. This dataset is specifically built for wildland fires. It also contains multimodal images (visual and NIR images) of fires. The images have their corresponding binary masks representing the ground-truth (segmented fire area). Other information is also available such as smoke presence, location of capture, type of vegetation, dominant color, fire texture level, etc. The dataset contains some aerial wildland fire views, but their number is limited.
The wildland fire UAV research is still lacking a dataset that can help improve the development of the algorithms needed in a wildland fire assistance system.
Table 6 contains a brief description of the main fire research datasets.
6. Fire Geolocation and Fire Modeling
In a wildland fire scenario, when a fire is detected, the vehicle must alert the GCS and send the fire’s geolocation to deploy the firefighting resources. In the reviewed literature, two different levels of approach are studied for detection alert. Some authors are using a local approach where the position of the fire is reported at first contact. Other authors go further by taking a global approach to the problem by identifying and locating the entire perimeter of the fire.
The simplest alerting approach is to directly provide the geographical coordinates of the UAV using the onboard GPS when a fire is first detected. This can be performed with good accuracy when the UAV is flying at low altitudes and has its data acquisition sensor pointing to the ground with a 90-degree angle. This approach is employed by Wardihani et al. [
55] using a downward pointing temperature sensor to locate fire hotspots. A similar approach is possible with a camera located on the bottom of a UAV and oriented downward. However, for a camera located on the front side of the UAV, it is required to compute a projection of the camera plane onto a global coordinate system using an homography. This transformation allows mapping pixel coordinates to the ground plane. This approach performs well when the UAV pose estimation is reliable and when the ground is mostly planar. Some difficulties arise in the presence of uneven surfaces. Some authors [
17,
30,
41,
44,
45] have circumvented this limitation by exploiting a previously known Digital Elevation Map (DEM) of the surveyed area. DEM allows for the estimation of the location from where a ray corresponding to a fire pixel originated and thus improves the fire location estimation. DEMs can induce some errors. To reduce these errors, a UAV fleet looking at the same hotspot can first detect the fire and then use different views of the UAV to refine the estimations [
30].
In order to better characterize ongoing wildfires, some authors have studied fire modeling in order to provide global information such as the fire boundaries and its behavior. The simplest models are using an elliptic shape which is fitted to the fire and where each ellipse axis increases at some given rate. For example, Ghamry and Zhang [
46], Ghamry and Zhang [
47], Ghamry et al. [
69] applied an elliptical model to estimate the fire perimeter. Here, the rate at which the ellipse axis grows depends on the direction towards which the wind blows and its speed. This allowed the authors to estimate the perimeter of the fire and then define a UAV team formation for further monitoring.
More complex fire models with more variables and data inputs have also been studied. These more advanced models often try to estimate the rate of spread (ROS) of the fire based on wind speed and direction, terrain slopes, vegetation density, weather and other variables. These models are often tested in a simulation. For example, Kumar et al. [
39], Pham et al. [
57,
58], Lin et al. [
54,
63] and Seraj and Gombolay [
62] used the FARSITE model to test their coordination strategies under various scenarios. Some of these models were not suitable for real-time fire estimation because their complexity significantly increased the computation time. However, Lin et al. [
54,
63] proposed a convergent Kalman filter-based methodology to provide data to a scalar field wildfire model that is executable on-board a UAV and requires low computation resources. The proposed approach was able to provide estimations of the wildfire ROS and the fire front contour.
Some authors used a different approach to model and characterize the fire. For example, Martínez-de Dios et al. [
40] used multiple images to extract geometric features from the fire such as the base perimeter, the height and the inclination. The extraction is performed using computer vision techniques (e.g., image segmentation). The authors propose the use of multiple visible-NIR multimodal stereo vision systems to extract the fire area. Each stereo system provides an approximate 3D model of the fire. The models captured using multiple views are registered to get the fire 3D model. This 3D model is tracked over time to compute different fire characteristics such as height, width, inclination, perimeter, area, volume, ROS and their evolution over time.
Bradley and Taylor [
38] divided the environment into cells and assigned a fire probability to each cell using IR images. This method takes into account the uncertainty in the position of the UAV and therefore applies a Gaussian weighting scheme to the probabilities. The authors then apply a Sequential Monte Carlo (SMC) method to compose a Georeferenced Uncertainty Mosaic (GUM) which is then used to locate the fire. Belbachir et al. [
42] model the fire as a static cone of heat sourcing from the fire center and dissipating with an altitude and a horizontal distance. Based on this assumption, they construct a grid of fire probabilities with the temperature measures. The fire is detected when the probabilities are above a defined threshold. Lin and Liu [
63] also generate an occupancy grid by using temperature sensors and by associating temperatures to cells. They also compute the gradient of the grid and estimate the fire center, ROS and perimeter.
7. Coordination Strategy
Coordination strategy is an important component when deploying autonomous UAVs. The coordination strategy establishes the procedure for communication, task allocation and planning procedures. Based on the communication links established during the mission, three main schemes can be distinguished. First, for a single vehicle, there is no coordination strategy as the UAV does not need to communicate with other UAVs. For multiple UAVs, the path planning and task allocation are often resolved by an optimization process or assumed to be so. One approach is to centralize the path planning and decision process in the GCS and only allows the UAV to communicate with it but not between each other. Another approach is to tackle the problem of coordinating multiple entities in a distributed and decentralized manner. Each vehicle can connect to other UAVs, allowing for distributed decision-making and communication with the GCS is only for reporting observations but not for planning.
7.1. Single UAV
The viability of single UAVs, either large airships or small aerial systems, has been evaluated for wildland fire surveillance and monitoring. The Ikhana UAS [
17] was deployed in western US between 2006 and 2010. It was a single large and high endurance vehicle with powerful sensory systems for autonomous fire detection. The decision strategy and the path planning were performed by human operators. Similarly, Wardihani et al. [
55] used small quadcopter UAV and manually defined flight paths using a mission planner software in order to survey a region and detect hotspots. Pastor et al. [
41] proposed a semi-autonomous system in which a single UAV would sweep a rectangular area, locate hotspots and then return to a nearby ground station. A human could control the UAV and order it to stay over the hotspot location to confirm visually if it corresponds to a real fire or not. Martins et al. [
33] used an entirely autonomous navigation system where the UAV only received waypoints from where to start surveillance. When a hotspot is detected, the UAV approaches the source, hovers over the target and confirms the fire. The experimental tests showed very interesting results for fire detection and monitoring tasks.
While single UAV strategies are interesting for their simplicity, they remain very limited in relation to large-scale wildland fires. For this reason, the more advanced and mature solutions use team-based systems that help increase the coverage area.
7.2. Centralized
The addition of more UAVs to the mission increases the area covered by the systems. In a centralized team strategy, all UAVs are coordinated by a single GCS. This scheme can lead to a more accurate fire georeferencing and less false alarms by allowing for a global situation awareness at all times. Another advantage of centralized communications is that it makes centralized processing easy and therefore makes it possible to use smaller and more affordable UAVs as they do not require high-processing power. The main drawback of this approach is the need for a functional communication network that can connect to all UAVs at all times which is not always possible when the fire areas are remote.
Martínez-de Dios et al. [
30] proposed a simple centralized approach where data from multiple UAVs is combined to correct and reduce the uncertainty of fire georeferencing. After a fire is detected by a unit, nearby vehicles are sent to the same region to perform a fire confirmation.
Belbachir et al. [
42] proposed a greedy algorithm for fire detection using a probability grid. For this purpose, each UAV selects, in a greedy way, the path that provides more information. The UAVs visit cells that have not yet been visited and which are within the direction where the temperature increases.
Ghamry and Zhang [
46] distributed the UAVs uniformly around the fire perimeter using an elliptical formation. This allows the UAVs to keep their paths at even angles around the estimated fire center. Ghamry and Zhang [
47] added the ability to restructure the formation if a UAV is damaged or has to leave for refueling. To achieve this fault-tolerant behavior, when a UAV needs to leave the formation, all communications with it are stopped. Other vehicles automatically notice the missing UAV and start performing a reformation process. In this system, prior to the monitoring task, the fleet flies in a leader–follower formation where the leader gets a predetermined flight path and the rest follow it at specific distances and angles. In the work of Lin et al. [
54], Lin and Liu [
63], UAVs are directed to fly uniformly in formation around an estimated fire center. In this approach, a Kalman filter is used to estimate the fire contour and the fire center movements, allowing the UAVs to fly and adapt their formation accordingly.
While incomplete, initial results by Aydin et al. [
26] are worthy of mention as it is one of the only works to tackle fire fighting directly. The authors theorized a collaboration model where scout UAVs would spot wildfires and monitor the risk of spread to structures. Relay UAVs would then be used to extend the communication range and allow the scouts to contact firefighting UAVs carrying fire-extinguishing balls. It is believed that 10 UAVs each carrying 10 1.3 kg fire-extinguishing balls would be able to extinguish an area of approximately 676 m
2 per sortie. While the extinguishing capacity of the fire-extinguishing balls was validated, the UAV coordination strategy has not been tested yet. However, this approach remains promising for wildfire fighting.
7.3. Decentralized
In a decentralized communication scheme, the UAVs are communicating between each other in order to collaborate for path planning and optimal area coverage. The interaction with the GCS is reduced to a minimum and usually only happens at the beginning of a flight to receive initial flight coordinates or at the end of a flight for observation reporting and data transfers. The system is able to perform more tasks in an autonomous manner and even to cover larger areas by using some UAVs as communication relays. The main advantages of such an approach are reliability as a link with the GCS is not required to be active at all times and the possibility for operations in remote areas where global communication links are impractical. However, the added complexity imposes new challenges as distributed coordination algorithms need to be developed and implemented. In the literature, these systems were mainly used for optimal fire perimeter surveillance and task allocation.
Alexis et al. [
37] describe a UAV rendezvous-based consensus algorithm which aims to equally distribute the path length of the UAV around the fire perimeter. UAVs depart in pairs and in opposite directions around the fire perimeter. They set rendezvous locations where they share knowledge about the traveled paths, the current state of the fire perimeter and other units encountered. If the update shows that the fire perimeter has evolved, then each UAV will select new rendezvous locations in such a way that the distance traveled by each of the UAVs is almost the same. The authors have shown through simulations that the algorithm converges and the recomputing of rendezvous points allows efficient adaptation of the UAV formation to an evolving fire perimeter. The optimal distribution of UAVs around a fire perimeter has also been studied by Casbeer et al. [
32]. They demonstrated that in order to reduce the length of time between data uploads to the GCS, the UAVs must depart in pairs, travel in opposite directions and be evenly spaced around the perimeter. To achieve optimal perimeter tracking, they designed a control loop to keep half of the bottom-facing IR camera over hotspot pixels and the other half over non-fire area.
For monitoring, Pham et al. [
57,
58] proposes a collaborative system in which UAVs are sent to monitor a fire and optimally cover the fire area. This formation is achieved by detecting neighboring UAVs and reducing camera view overlaps while considering the location of the fire front. The UAVs are also allowed to increase or decrease their altitude in order to control the resolution of the captured imagery to provide optimal observational capabilities. This behavior is accomplished with the application of a force field-based algorithm that simulates the attraction of a UAV by the fire front and its repeal from the other UAVs. The attraction and repulsion forces are adapted by considering the fire front confidence and the estimated field of view of each UAV. One problem with this approach is that the visibility reduction induced by smoke is not taken into account which can put the vehicle in a dangerous situation.
Another coordination strategy was proposed to perform optimal task allocation within a team of UAVs. The tasks can be surveillance, monitoring or firefighting. Ghamry et al. [
31] proposed an auction-based firefighting coordination algorithm. In this algorithm, a fire is first detected and then the UAV must coordinate themselves to act upon each known fire spot. To achieve this task, each vehicle generates a bid valued by a cost function of its distance from the fire spot. In this manner, the UAV with the best offer for the task will be assigned to it. Sujit et al. [
36] also proposed a similar auction-based collaboration algorithm but with the ability to consider a minimal number of UAVs to watch each hotspot. Both contributions distributed the UAVs equally around the fire perimeter.
Decentralized approaches have also been used for direct fire fighting using fire suppressants. Kumar et al. [
39] proposed such a coordination protocol where the planned path of each UAV is optimized to minimize the distance to a detected fire perimeter. As a second phase, the path of UAVs carrying fire suppressants is optimized by minimizing the distance to the fire center. This allows the solution to monitor a fire situation and provide optimal fire suppressant delivery.
Recently, new control approaches based on deep reinforcement learning (DRL) started to appear in the literature. One of the very first with such an approach for wildfire monitoring has been proposed by Julian and Kochenderfer [
59]. The authors first formulated the problem as a partially observable Markov decision process (POMDP) solvable with DRL. A simulation environment being required for DRL, they also defined a simplified stochastic wildfire model using a 100 × 100 fire presence grid. This environment was used to train a simulated fixed-wing agent with a decision process based on a CNN. Multiple agent using the same CNN can be spawned in the same environment to simulate a multi-UAV system. While the authors defined different DRL approaches, the best performing approach used a collaborative belief map shared and updated by all agents indicating the state of the wildfire. A reward function rewarding newly discovered burning cells by any aircraft is used to encourage good fire monitoring and collaboration between agents. An aircraft proximity penalty is also added to encourage aircraft separation. Simulation results show that the approach is able to outperform a baseline receding-horizon controller, scale with different numbers of aircraft and adapt to different fire area shapes. However, the approach remains limited as the environment modeling is oversimplified, the UAVs are assumed to maintain a steady altitude, a constant speed and fly at different altitudes as collision avoidance is not implemented.
While new approaches are interesting, research on objective function optimization-based distributed control frameworks is still very active and continues to generate state-of-the-art results. This is the case with the approach proposed by Seraj and Gombolay [
62]. The authors used a dual-criterion objective function based on a Kalman uncertainty residual propagation and a weighted multi-agent consensus protocol. An adaptive extended Kalman filter (AEKF) is used to leverage the fire propagation model (FARSITE) and the observation model. The approach includes an uncertainty-based controller built through the combination of a fire front location uncertainty map and a human uncertainty map. This allows the system to take into account GPS-equipped human firefighters on the ground in order to ensure their safety while considering the fire front location like other similar methods. A second controller (formation controller) is encouraging the UAV team to maintain a formation consensus for maximizing the coverage. The approach is using the theory of artificial potential field to generate artificial forces to pull or push on the UAV in order to attain an optimal state. Following a simulation, the solution was able to outperform both a state-of-the-art model-based distributed control algorithm and a DRL baseline strongly confirming the relevance of the approach.
This paper only reviews decentralized communication frameworks used in wildland fire contexts. However, many solutions in the literature are presented as general communication solutions without corresponding applications. This is the case with the work of Pignaton de Freitas et al. [
115] that proposed a multipurpose localization service to inform all UAVs in the formation of the other UAVs position. One interesting and rarely seen feature of the system is its ability to estimate the position of UAVs that are not received due to communication errors. This illustrates that researchers in the field should not only refer to wildfire-related works when the time comes to design new systems and that some works outside of the field may be important to consider.
8. Cooperative Autonomous Systems for Wildland Fires
UAVs can play an important role in the detection and monitoring of large wildland fires. Multiple UAVs can collaborate in the extraction of important data and improve firefighting strategies. Moreover, aerial vehicles can cooperate with unmanned ground vehicles (UGV) in operational firefighting scenarios.
One type of cooperation can consist of the use of UGV to carry small short endurance UAVs to detected fire areas and be used as refueling stations. Ghamry et al. [
69] proposed such a system, where a coordinated leader–follower strategy is used. UAVs are carried by UGV to a desired location and deployed to explore preassigned areas. If a UAV detects a fire, an alert is sent to the leading UGV and to the rest of the fleet. The leader computes new optimal trajectories for the UAVs in order to monitor the fire perimeter. Phan and Liu [
116] present another firefighting collaborative UAV-UGV strategy. A hierarchical UAV-UGV system composed of a large leading airship and cooperative UAV and UGV is proposed. When a fire is detected, the vehicles are deployed for fire monitoring. In this scenario, UAVs and UGVs are supposed to have the capacity to carry water and combat fire. The UAVs are deployed in an optimal flying formation over the fire front area. UGV are sent to prevent the fire propagation and limit its spread using water and fire retardants. Auction-based algorithms are implemented to allocate the tasks to each vehicle. Viguria et al. [
117] also proposed the use of task allocation by an auction-based algorithm. In their framework, the vehicles can perform various tasks such as surveillance, monitoring, fire extinguishing, transportation and acts as a communication relay. A human or the GCS can generate a list of tasks that need to be fulfilled. Each robot sends a bid for each task and the one with the best offer wins and can proceed to execute the task. The offers are based on specific cost functions for each task that consider the vehicle distance, fuel level and capabilities.
Akhloufi et al. [
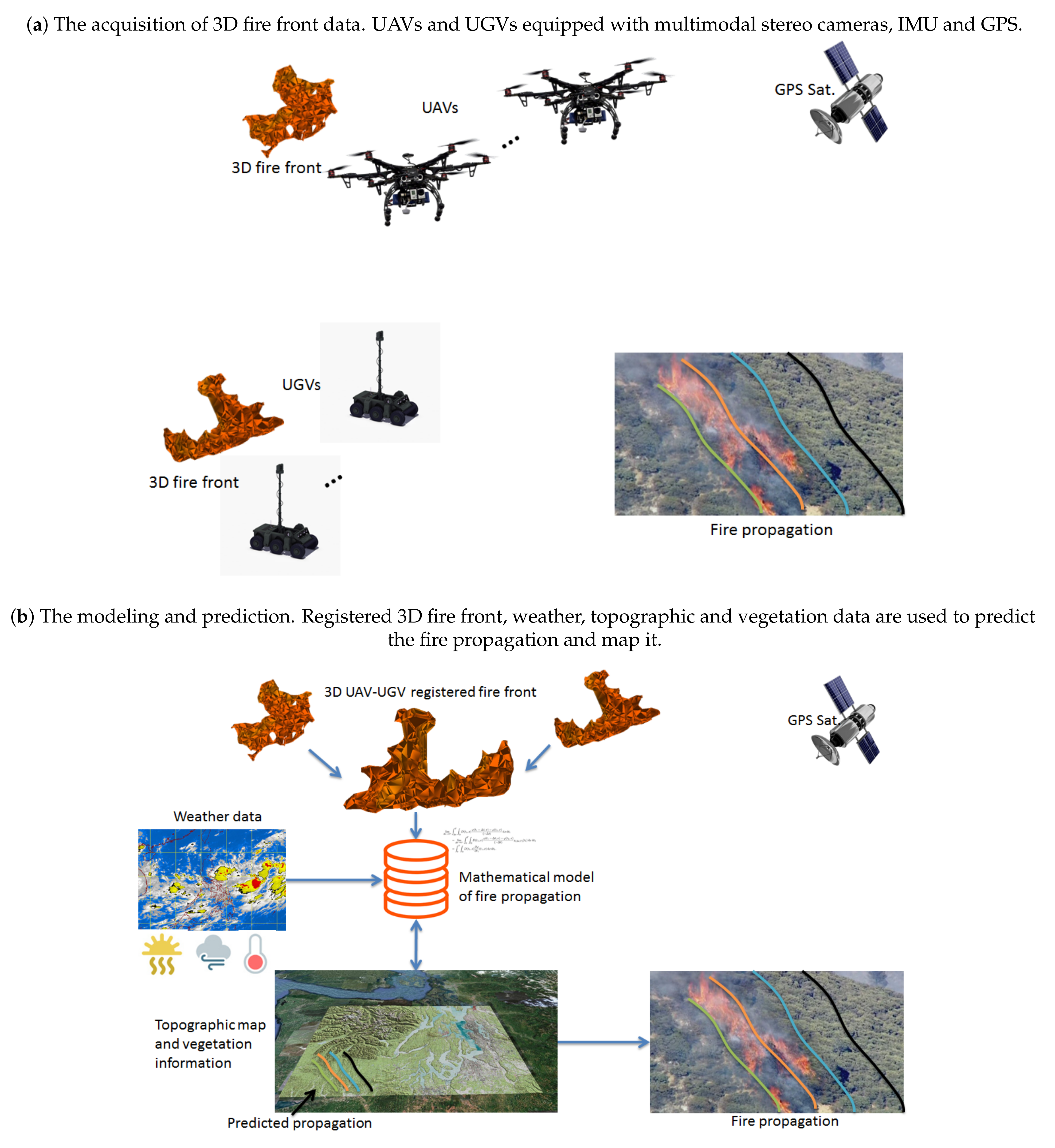
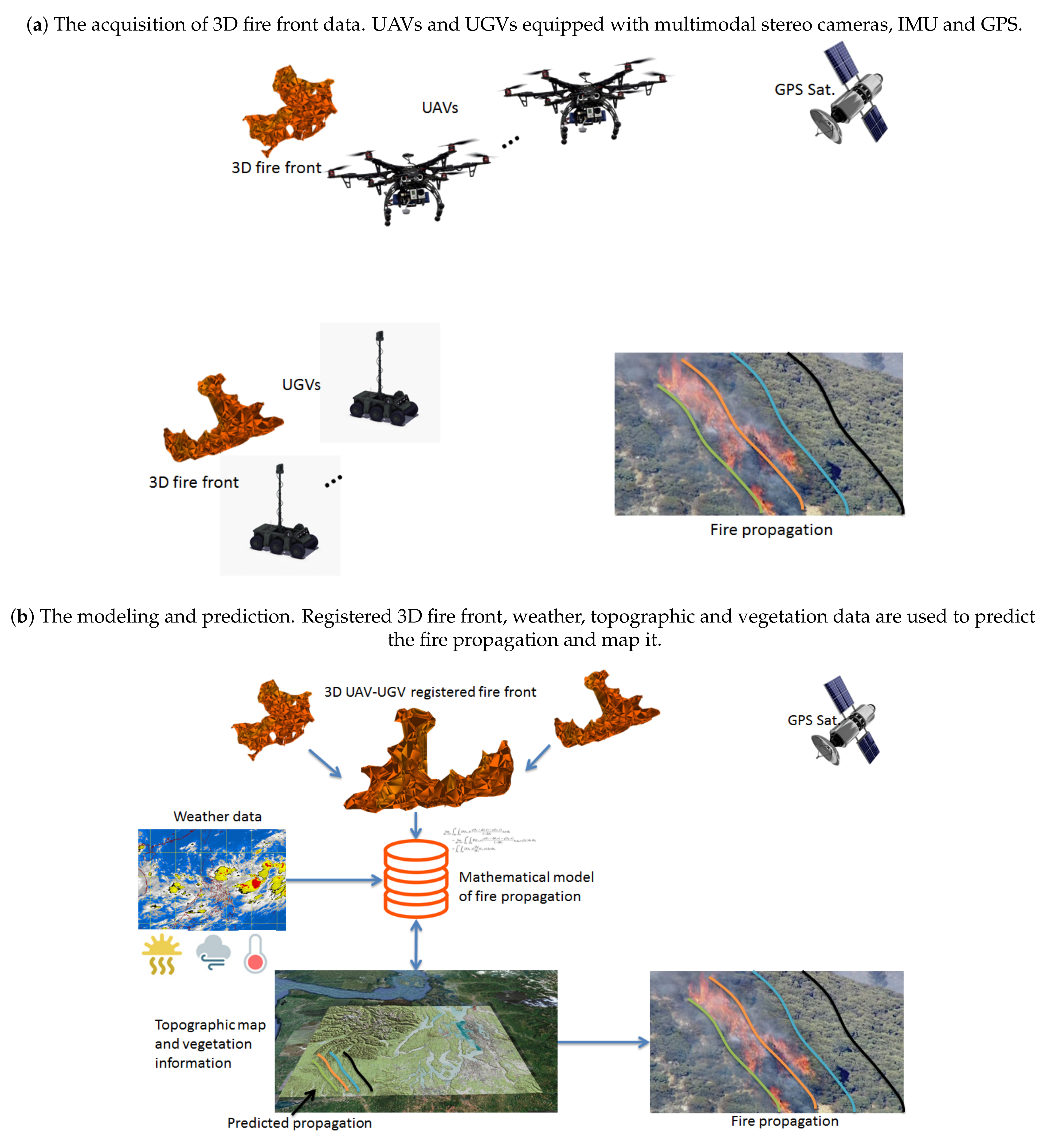
118] proposed a multimodal UAV-UGV cooperative framework for large-scale wildland fire detection and segmentation, 3D modeling and strategical firefighting. The framework is composed of multiple UAVs and UGVs operating in a team-based cooperative mode.
Figure 2 illustrates the proposed framework [
118]. The vehicles are equipped with a multimodal stereo-vision system such as the ones developed for ground-based fire detection and 3D modeling [
119,
120,
121,
122]. The stereo system includes multispectral cameras operating in the visible and NIR spectrum for efficient fire detection and segmentation. Each stereo system provides an approximate 3D model of the fire. The models captured using multiple views are registered using inertial measurements, geospatial data and the extracted features using computer vision to build the propagating fire front 3D model [
119,
120,
121]. Based on the 3D model of the fire, the UAVs and UGVs can be positioned strategically to capture complementary views of the fire front. This 3D model is tracked over time to compute different three-dimensional fire characteristics such as height, width, inclination, perimeter, area, volume, ROS and their evolution over time. The extracted three-dimensional fire characteristics can be fed to a mathematical fire propagation model to predict the fire behavior and spread over time. The obtained data make it possible to alert and inform about the risk levels in the surrounding areas. The predicted fire propagation can be mapped and used in an operational firefighting strategy. Furthermore, this information can be used for the optimal deployment of UAVs and UGVs in the field. This type of framework can be combined with other firefighting resources such as firefighters, aerial firefighting aircraft and future fire extinguisher drones.
9. Conclusions
This paper presents a survey of different approaches for the development of UAV fire assistance systems. Sensing instruments, fire perception algorithms and different coordination strategies have been described. UAVs can play an important role in the fight against wildland fires in large areas. With the decrease in their prices and their wider commercial availability, new applications in this field will emerge. However, some limitations remain such as autonomy, reliability and fault tolerance. Further research is needed to overcome these limitations. Security is also a concern, as there are risks associated with having UAVs flying over firefighters or close to aircraft carrying water and fire retardants. Nevertheless, the benefits of using UAVs are significant and this could lead to innovations aiming to solve these problems.
On the perception side, most of the developed techniques rely on classical computer vision algorithms. However, the emergence of some work in the field of deep learning has been witnessed in recent years, especially for fire detection, but it remains in the early stages of development. Furthermore, some datasets containing wildland fire images that can be used for the development of computer vision algorithms were presented. Unfortunately, only a small number of them contains aerial views of wildland fires. In addition, the lack of a large dataset limits the development of advanced deep learning algorithms. Such datasets would be important for the future of the field as they can serve to benchmark approaches and compare them quantitatively. Therefore, deep learning and the construction of new large-scale aerial wildfire datasets represents interesting research opportunities for future contributions by researchers in the field.
In this work, frameworks proposing cooperative autonomous systems where both aerial and ground vehicles contribute to wildland firefighting were also discussed. While these frameworks are mostly theoretical and limited to simulations, they provide interesting ideas about a more complete wildland firefighting system. Future research in these areas can provide new approaches for the further development of autonomous operational systems without or with little human intervention.





{kind=link}
{kind=link}