Abstract
Accurate and timely information on surface water quality and quantity is critical for various applications, including irrigation agriculture. In-field water quality and quantity data from unmanned aerial vehicle systems (UAVs) could be useful in closing spatial data gaps through the generation of near-real-time, fine resolution, spatially explicit information required for water resources accounting. This study assessed the progress, opportunities, and challenges in mapping and modelling water quality and quantity using data from UAVs. To achieve this research objective, a systematic review was adopted. The results show modest progress in the utility of UAVs, especially in the global south. This could be attributed, in part, to high costs, a lack of relevant skills, and the regulations associated with drone procurement and operational costs. The progress is further compounded by a general lack of research focusing on UAV application in water resources monitoring and assessment. More importantly, the lack of robust and reliable water quantity and quality data needed to parameterise models remains challenging. However, there are opportunities to advance scientific inquiry for water quality and quantity accounting by integrating UAV data and machine learning.
1. Introduction
Freshwater accounts for only 2.5% of the total amount of water on the earth’s surface, and about 1.5% of that amount is accessible for biophysical processes [1]. Meanwhile, freshwater is a fundamental input in agricultural production, numerous manufacturing industries, and a basic need for domestic uses. Specifically, agriculture accounts globally for about 70% of the total freshwater usage, mostly through irrigation [2,3]. Intense competition for water between different sectors will increase with an increase in the world population increase from the current 7.8 billion to about 9.7 billion by 2050. Consequently, global agricultural production is expected to increase by 60 to 70% [4], which will substantially increase water demand.
In the global south, particularly Southern Africa, water resources are unevenly distributed, and this is compounded by climate variability (i.e., an unpredictable seasonality of precipitation). The quality and quantity of available water affect all water users, including crop irrigation. Based on the recent findings presented by Bronkhorst et al [5], irrigation agriculture contributes to 25–30% of South Africa’s agricultural production, and is responsible for up to 90% of high-value crops production and 25 to 49% of industrial crop production; however, it uses 60% of freshwater resources [5,6]. Meanwhile, urban and rural water use (including domestic use) consume 30% of available water resources. In this regard, there is an urgent need to identify accurate and efficient methods for assessing the quality and quantity of available surface water resources. The quantity and quality of available water resources are conventionally determined from in situ measurements, which in some cases can be time-consuming and costly [7]. In situ measurements do not always provide adequate spatial representativeness, and information may not be readily available to users such as farmers. In situ measurements may not always provide information about the temporal variability of available water, which is necessary for managing crop irrigation [7].
Earth observation and geospatial technologies have been widely proven to provide synoptic, timely, and spatially explicit data of various aspects of the earth’s surface, including the spatio–temporal variability of both the quality and quantity of available water [7]. The literature shows that clean water generally absorbs electromagnetic energy mostly from the visible section (green) to the longer wavelengths in the infrared sections [8,9]. Subsequently, water has been detected and discriminated from other landcover types in this regard. Furthermore, this attribute of clean water has facilitated the determination of water quantity (surface volumes, spatial extent) and quality of surface water resources based on earth observation data and geospatial approaches. Earth observation facilities have been proven useful in accurately and efficiently characterising various attributes of surface water resources. These include the moderate-resolution imaging spectroradiometer (MODIS) [10], Landsat [11], SPOT [12], and Worldview [13], Medium Resolution Imaging Spectrometer (MERIS) [14], to mention a few. Work by Gholizadeh et al. [7] comprehensively details parameters that have been widely used to estimate water quality using remote sensing techniques. However, Gholizadeh et al. [7] extensively illustrate the application of remote sensing techniques at regional and landscape scales. Additionally, freely available satellite-borne earth observation facilities such as the Landsat and Sentinel 2 multispectral instrument remain inapplicable for local to farm-scale water resources monitoring and management.
Unmanned aerial vehicle systems (UAVs), also known as drones, have emerged as a potential alternative for mapping and monitoring the quality and quantity of water resources at local scales. This is because drones are flexible, relatively cheaper in comparison to in situ measurements and spaceborne remote sensing, and can be flown at low altitudes, offering very high spatial resolution data, with high prospects of timely and accurately characterising water quality and quantity for smallholder irrigation farms (Xiang et al., 2019). Dissimilar to satellite and other air-borne sensors, UAVs could be used in monitoring hazards (i.e., after landslides, floods, fires) [15] because they generate near-real-time, fine resolution, spatially explicit information. Despite the usefulness of UAVs, their application in agriculture, rural development, and, more importantly, water resources management, remains limited. Although some studies have sought to assess the literature on the utility of drones for a water resources assessment [7,16,17], the studies do not provide a systematic review that focuses on characterising water quality and quantity in the context of smallholder farming in the global south. To the best of our knowledge, the aforementioned studies did not conduct any bibliometric analysis to evaluate progress, gaps, and challenges faced by the global south in utilising drone technologies for mapping and monitoring the quality and quantity of surface water bodies. In this regard, this paper seeks to review and offer an in-depth systematic assessment of literature on progress, challenges, and opportunities in the utilisation of UAVs in mapping and monitoring surface water resources for improving crop water production in smallholder farms in the global south.
2. Materials and Methods
This study sought to conduct a systematic literature review on assessing the quality and quantity of water using UAVs. The review was structured into two sections. The first section sought to establish the progress attained using drone technologies to map and monitor open water bodies and identify existing gaps. The second section then outlined the challenges and opportunities for applying drone technologies in mapping and monitoring open water bodies for improving crop water production. To address these sections, the literature search and analysis were conducted in three phases
2.1. Phase 1: Literature Search
The initial step of the literature search was to identify keywords, terms, and phrases used in the actual search strings. The review’s objective was copied and pasted into Google Scholar, and the top three articles—Gholizadeh et al. [7], Lally et al. [16], and Cancela et al. [18]—were downloaded and reviewed for keywords, terms, and phrases. We identified the following keywords and their variants: “unmanned aerial vehicle(s)”, “drone(s)”, “Remote sensing”, “GIS”, “crop water use” “irrigation”, “water productivity”, “water use efficiency”, “water bodies”, “dam(s)”, “reservoir(s)” OR “river(s)”, water quality”, “water quantity”, and “water volume”. The query strings used across the databases are presented in Table 1. The searches were restricted to titles, abstracts, and keywords.

Table 1.
Key search words used in this study.
SCOPUS, Web of Science, and Science Direct were utilised to establish literature based on specified keywords. The literature search was framed based on the PRISMA statement (Table 1). Since the current work was adding to what has already been established, the literature search was not restricted to the above databases. We used Google Scholar to identify and include articles that SCOPUS, Web of Science, and Science Direct had not indexed. The search covered the period from 1980 to January 2021.
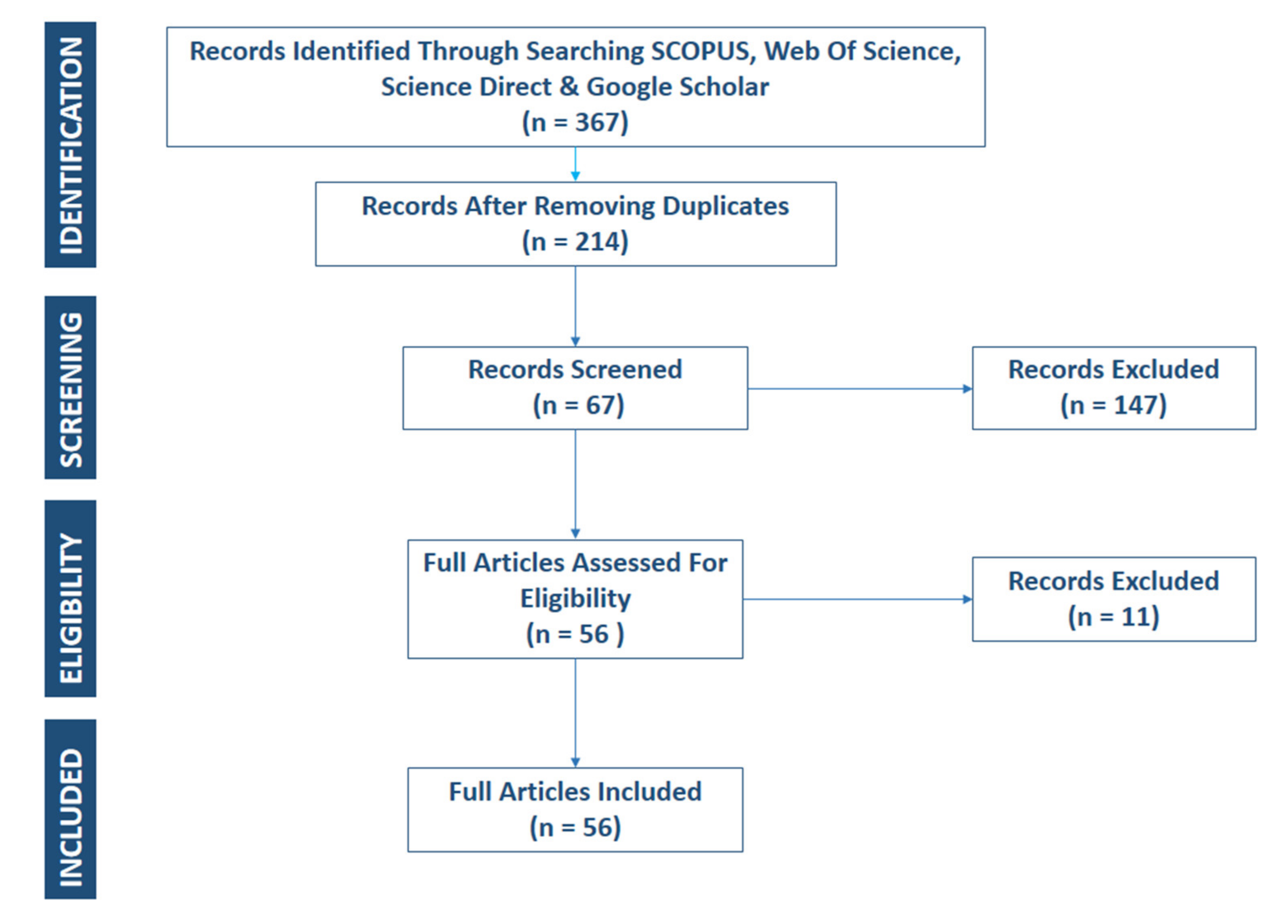
Initially, the literature searches from SCOPUS, Web of Science, and Science Direct retrieved 136, 108, and 73 articles, respectively (Table 1, Figure 1). All retrieved literature were compiled in EndNote in preparation for screening. Specifically, the bibliographic information of the articles was used at this stage. The first screening procedure was the removal of duplicates considering that the key search terms were similar. In the second step, literature that were not written in English were excluded from the analysis. The following step involved examining whether each article was based on detecting and/or predicting surface water quantity or quality. Full-length articles of the selected abstracts were then sought and downloaded. Subsequently, 214 articles were retained after the screening procedure (Figure 1). A Microsoft Excel spreadsheet was then created to capture the details of each study. The spreadsheet was then reduced to consider only the studies that had specifically utilised drones in mapping and modelling the quality and quantity of surface water bodies. Fifty-six articles were considered on the drones’ database (Table 1). The developed database was later used for quantitative assessment of the captured information.
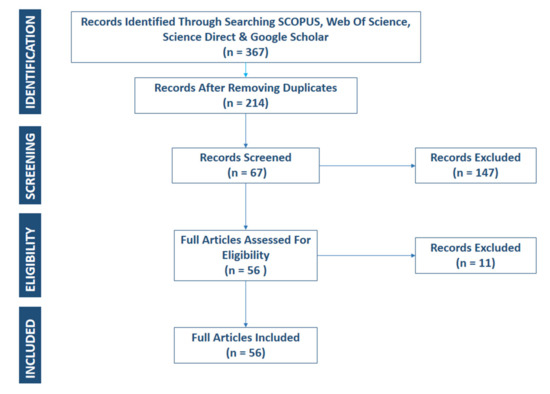
Figure 1.
Selection of the studies considered in this review.
2.2. Phase 2: Data Extraction
The database created from the previous phase was used to identify and comprehensively outline the existing progress, gaps, challenges, and opportunities in using drone technologies to map and model the quality and quantity of surface water bodies. To address these objectives of the study, the second phase extracted data from the identified articles. Specifically, information on the year the study was conducted, the study site, type of the surface water body, water quality parameter, sensor, vegetation indices, prediction or classification algorithms, and optimal spectral variables derived were captured. The categorical variables were then converted into numerical variables in preparation for data analysis. Meanwhile, key bibliometric information was also extracted during this phase. The bibliometric data extracted included author names, country, year of publication, the title of the article, name of the journal, and abstract. A few studies and grey literature that were not captured by the review were included at this phase. Subsequently, this phase was also regarded as evaluating the systematic review’s relevance and quality assessment stage.
2.3. Phase 3: Data Analysis
Identified literature and extracted data were subjected to quantitative and qualitative analysis. For the quantitative analysis, basic statistical frequencies were conducted. Furthermore, exploratory trend analysis was conducted in assessing progress on the utility and applicability of satellite and drone-based sensors in mapping and modelling the quality and quantity of surface water bodies. Bibliometric analysis was also conducted to reveal trends of key terms in monitoring surface water bodies. Bibliometric analysis is a quantitative method used to assess published articles and has become helpful in evaluating peer-reviewed studies in a specific field of research [19,20]. The evolutionary trends were inferred by statistically assessing the occurrence and co-occurrence of key terms used to map and monitor surface water bodies using VOSviewer software [21]. The titles and abstracts of articles in the final database (with 214 articles in Table 1), as well as the database of articles that specifically used drones, derived datasets (with 56 articles in Table 1) were used in the VOSviewer to investigate how concepts and topics have evolved in mapping and monitoring the quality and quantity of surface water bodies. Considering that only the occurrence, co-occurrence of key terms, and frequency distributions were computed, bias assessment was not conducted. Meanwhile, the Preferred Reporting Items for Systematic Reviews and Meta-Analyses checklist (http://www.prisma-statement.org/, accessed on 19 July 2021) was used as a guideline to avoid biased reporting [22,23]. The peer review system of the Drones MPDI Journal was also used in evaluating findings presented in this study.
The review was then presented in two sections to address the research objectives. The first section explored the progress attained, hitherto, in mapping and modelling the quality and quantity of surface water bodies using remotely sensed data. This section presented and detailed literature trends quantitatively evaluating the quality and quantity of surface water bodies. Specifically, water quality and quantity parameters, earth observation sensors (cameras), sensor platforms, algorithms, and optimal spectral variables that were used to date were showcased throughout this phase. The final phase then outlined and discussed the challenges, gaps, and opportunities existing in the context of knowledge creation in mapping and modelling the quality and quantity of surface water bodies using drone-derived remotely sensed data.
3. Results
3.1. Searched Literature Characteristics
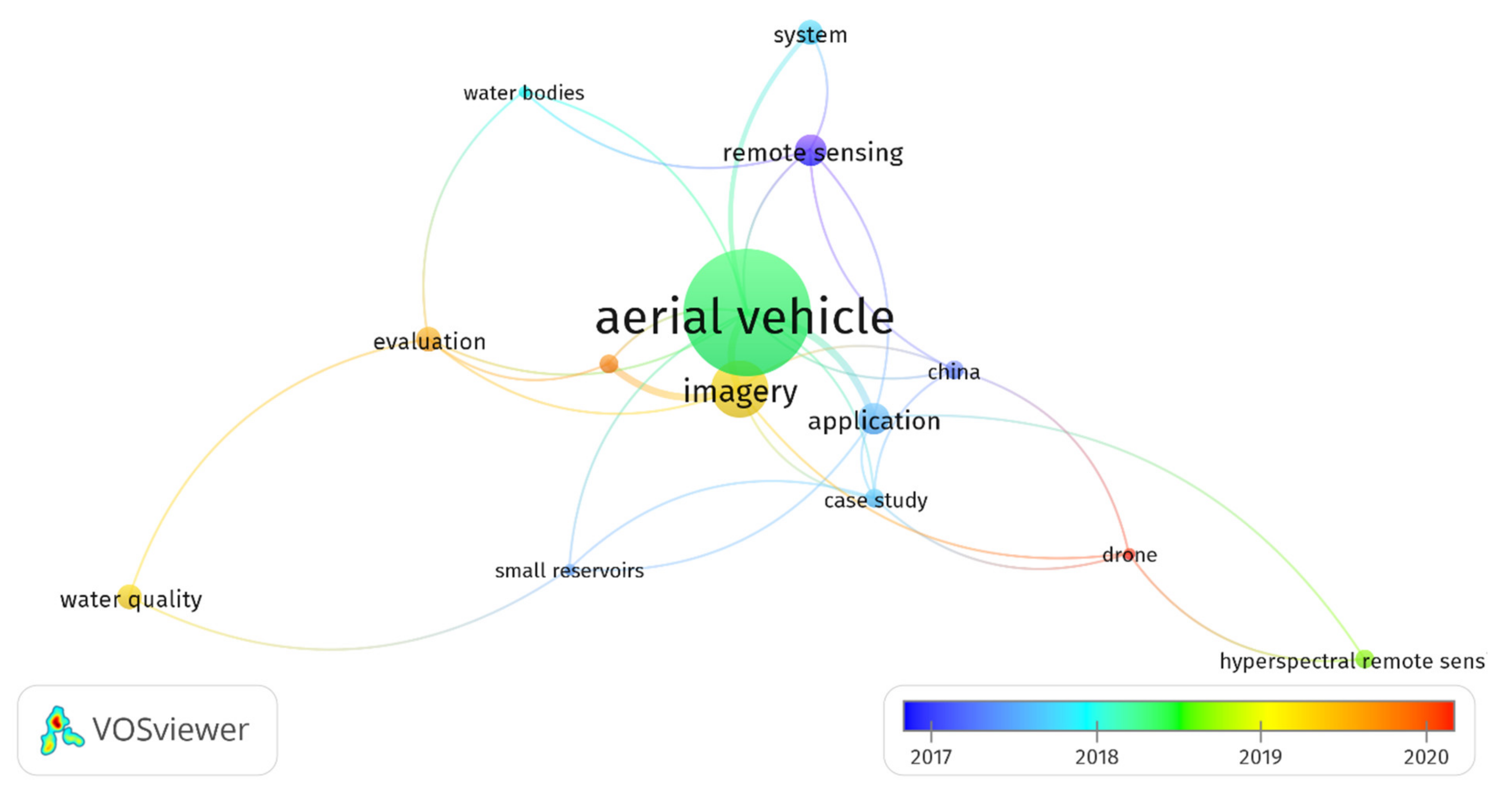
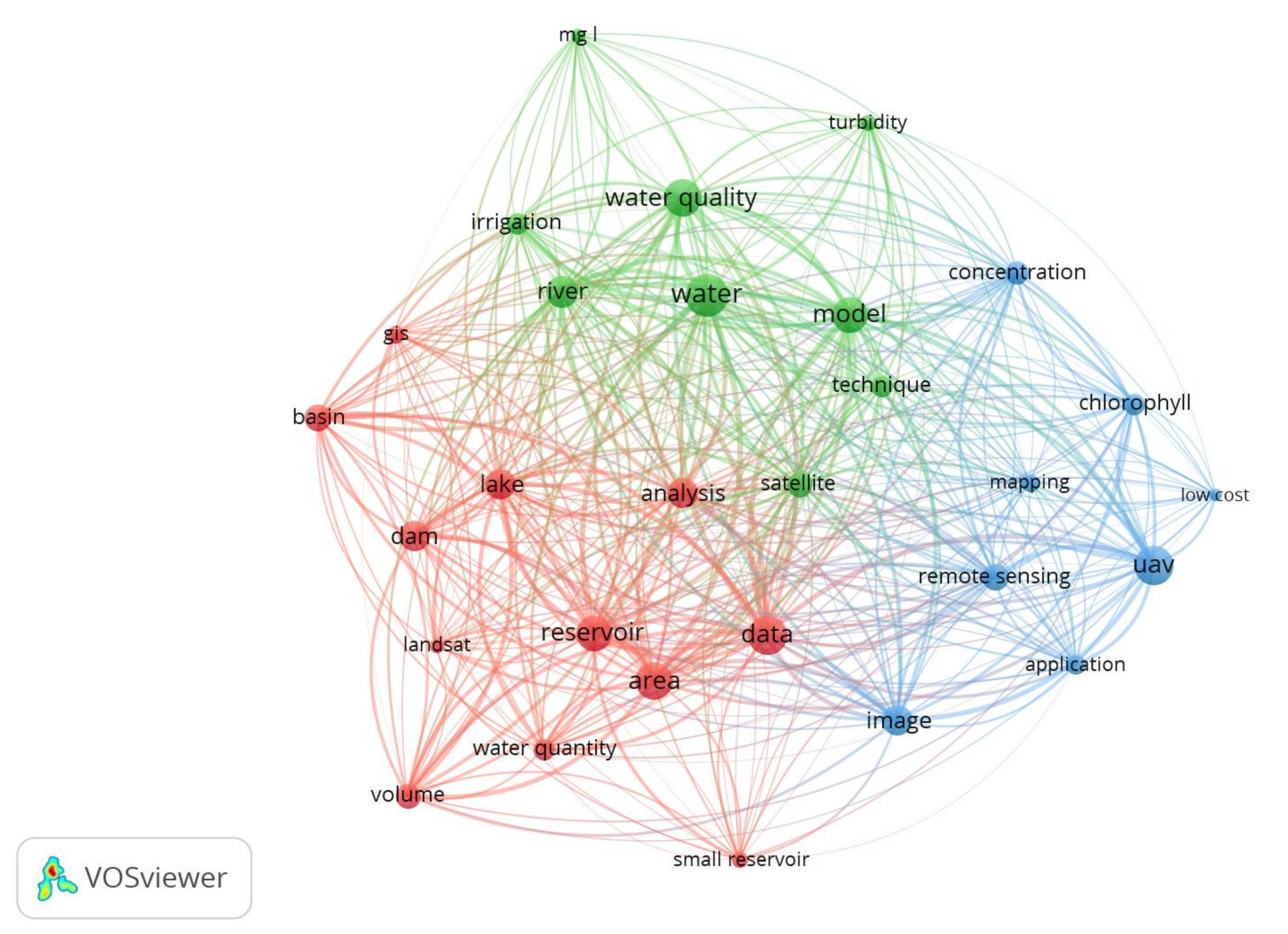
In evaluating the evolution and topical concepts of mapping and monitoring the quality and quantity of open water bodies, results showed that the utilisation of drone-based “remote sensing” “application” “case studies” trending mostly in “small reservoirs” of “China” around 2017 (Figure 2). The period from 2018 to 2020 represents an intensification in terms of the imagery analysis in the evaluation of water quality. This period was marked by the application of hyperspectral drone cameras in mapping water quality (Figure 2). Meanwhile, Figure 3 illustrates three topical clusters, green, blue, and red, in monitoring water. The key terms from the blue cluster were “UAV’, ‘remote sensing’, (‘image’), ‘application,’ ‘mapping’, ‘chlorophyll’, ‘concentration’, ‘low cost’, and ‘measurement’, which directly imply the utility of UAVs as a low-cost remote sensing system associated with mapping chlorophyll concentrations (Figure 3). The second-largest cluster linked to UAVs was in red and had ‘reservoir’, ‘lake’, ‘dam’, ‘basin’, ‘area’, ‘volume’, ‘area’, ‘data’, and Landsat. This articulates the major water quantity parameters, i.e., volume area, that were widely characterised using Landsat data and ‘GIS ‘techniques. The third cluster in green had ‘water quality’, ‘water’, ‘model’, ‘river’, ‘turbidity’, and ‘irrigation’ as the key terms in order of importance (Figure 3). This cluster presented the linkages between chlorophyll and turbidity concentrations which were previously modelled using satellite-borne data mainly in the context of evaluating the quality of crop irrigation water.
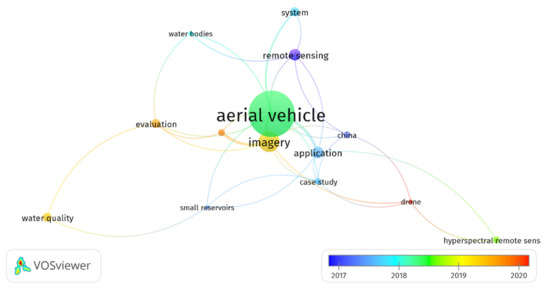
Figure 2.
Direction and revolution of topical concepts in mapping and monitoring the quality and quantity of open water bodies’ derived using data from abstracts and titles.
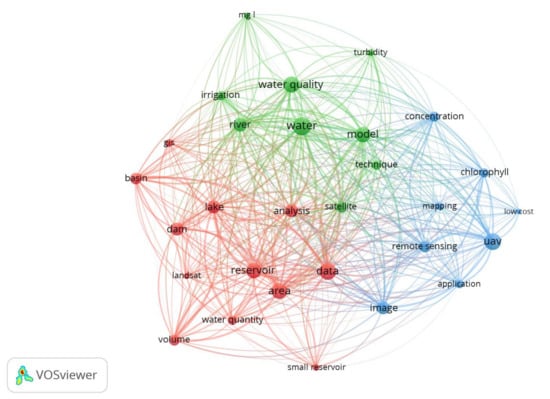
Figure 3.
Topical concepts in mapping and monitoring the quality and quantity of open water bodies’ derived using data from abstracts and titles.
3.2. Progress in Modelling Water Quality and Quantity
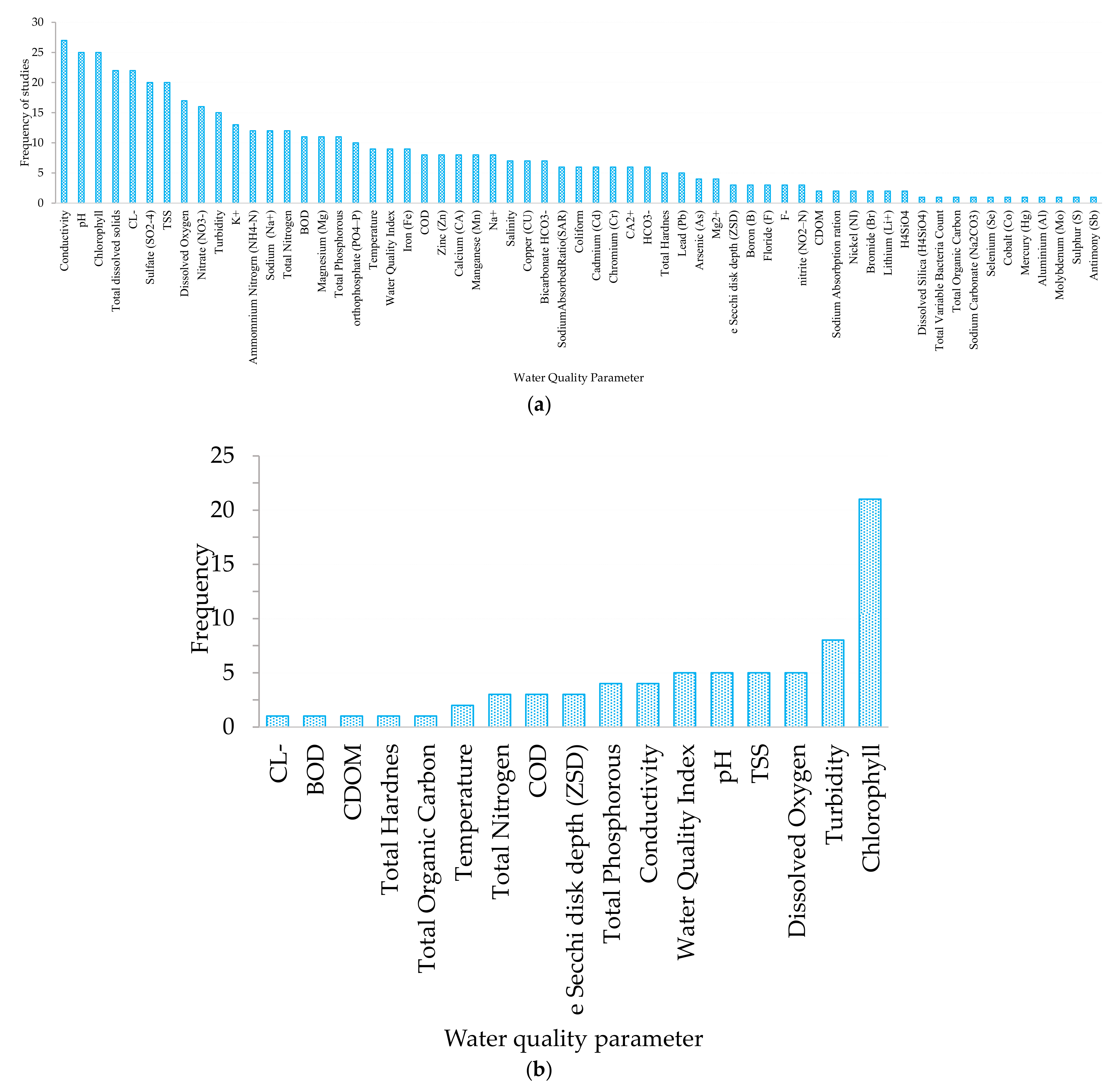
Generally, progress is noted in detecting, mapping, and monitoring surface water resources, using remotely sensed data (Figure 3). As in Gholizadeh, Melesse and Reddi [7], the results of this study illustrated that most of the studies that utilised earth observation data sought to characterise water quality more than water quantity (Figure 3). The widely researched water quality parameters included conductivity [24,25], pH [25,26], Cl− [24], dissolved oxygen [27], total suspended solids (TSS) [28,29], chlorophyll [30,31,32,33], turbidity [34,35,36], K+, ammonium nitrogen (NH4-N), sodium (Na+), BOD, magnesium (Mg), total phosphorous, orthophosphate (PO4–P), temperature and total nitrogen, iron (Fe), COD, zinc (Zn), calcium (Ca), manganese (Mn), salinity, copper (Cu), bicarbonate HCO3−, sodium-absorbed ratio (SAR), coliform, cadmium (Cd), chromium (Cr), CA2+, HCO3−, and total hardness in order of frequency, as illustrated in Figure 4b. These parameters were mostly characterised using satellite remotely sensed data.
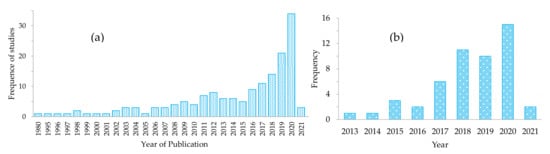
Figure 4.
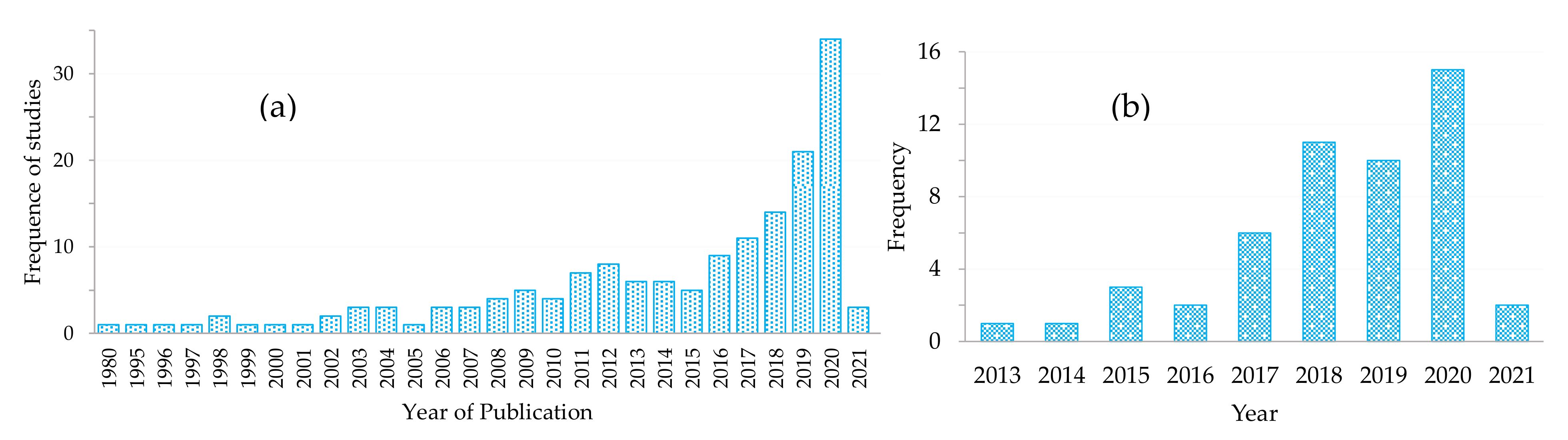
Frequency of studies that mapped surface water resources per year based on (a) both satellite and drone-borne sensors. (b) Drone-borne sensors.
The use of satellite remotely sensed data in mapping and modelling water quality and quantity has of late received extensive attention. This is illustrated by the steady increase in the number of studies that applied remote sensing techniques in mapping and monitoring water quality and quantity (Figure 4a). Meanwhile, a significant number of studies ventured into the utility of drones (Figure 4b). This study showed that works that utilised UAVs in mapping and monitoring water quality and quantity appeared around 2013 (Figure 4b). The studies that evaluated the utility of drone-derived data for mapping the quantity of water were significantly less than those that sought to assess the quality of water. Specifically, only fourteen studies assessed the level of water, whereas thirty-seven studies assessed water quality parameters based on drone remotely sensed data. However, the majority of the aforementioned studies were conducted based on drone remotely sensed data, principally mapped and monitored chlorophyll content [30,32,33,37,38] and turbidity in lakes, ponds, and dams (Figure 5b) [34,35,36].
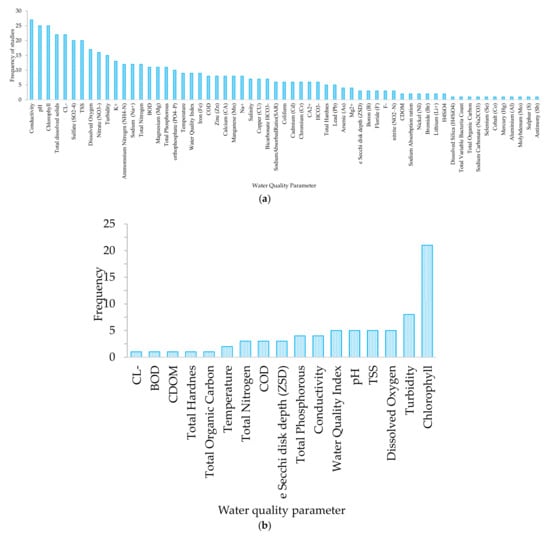
Figure 5.
Frequency of studies that considered a specific water quality parameter based on (a) all satellite and drone-borne sensors. (b) Drone-borne sensors only.
The quality of irrigation water that is generally considered acceptable should be colourless, odourless, foamless with minimum turbidity, TDS below 1000 mg L−1 at circumneutral pH, and a specific conductance below 1.5 mmhos/m [39,40,41]. COD, ZSD, TP, conductivity, pH, TSS, DO, and turbidity are critical attributes of water that need to be frequently monitored if high-quality crops and full potential harvests are to be attained.
For irrigation water, COD is a critical attribute that needs to be frequently monitored. COD and biochemical oxygen demand (BOD) are appropriate indicators for organic matter concentrations in irrigation water. When COD and BOD are high in irrigation water, much of the oxygen in the water will be consumed during the decomposition of organic matters resulting in an anaerobic condition [42]. In this process, soil oxides such as Fe3+, Mn5+ and SO42− will exhaust oxygen to reduce the oxidation–reduction potential. Subsequently, the generated iron, manganese, sulphides, and organic acids may limit crop uptake and the absorption of nutrients. This frequently results in stunted growth, poor quality, and reduced harvests.
ZDS is an indicator of turbidity and the total number of suspended particles in irrigation water [39]. A high concentration of suspended particles tends to result in an altered colour of the water and lower ZDS measurements. Higher concentrations of suspended sediments result in the clogging of irrigation equipment such as sprinklers. Therefore, high turbidity or TSS impedes irrigation by drippers and sprinklers [43].
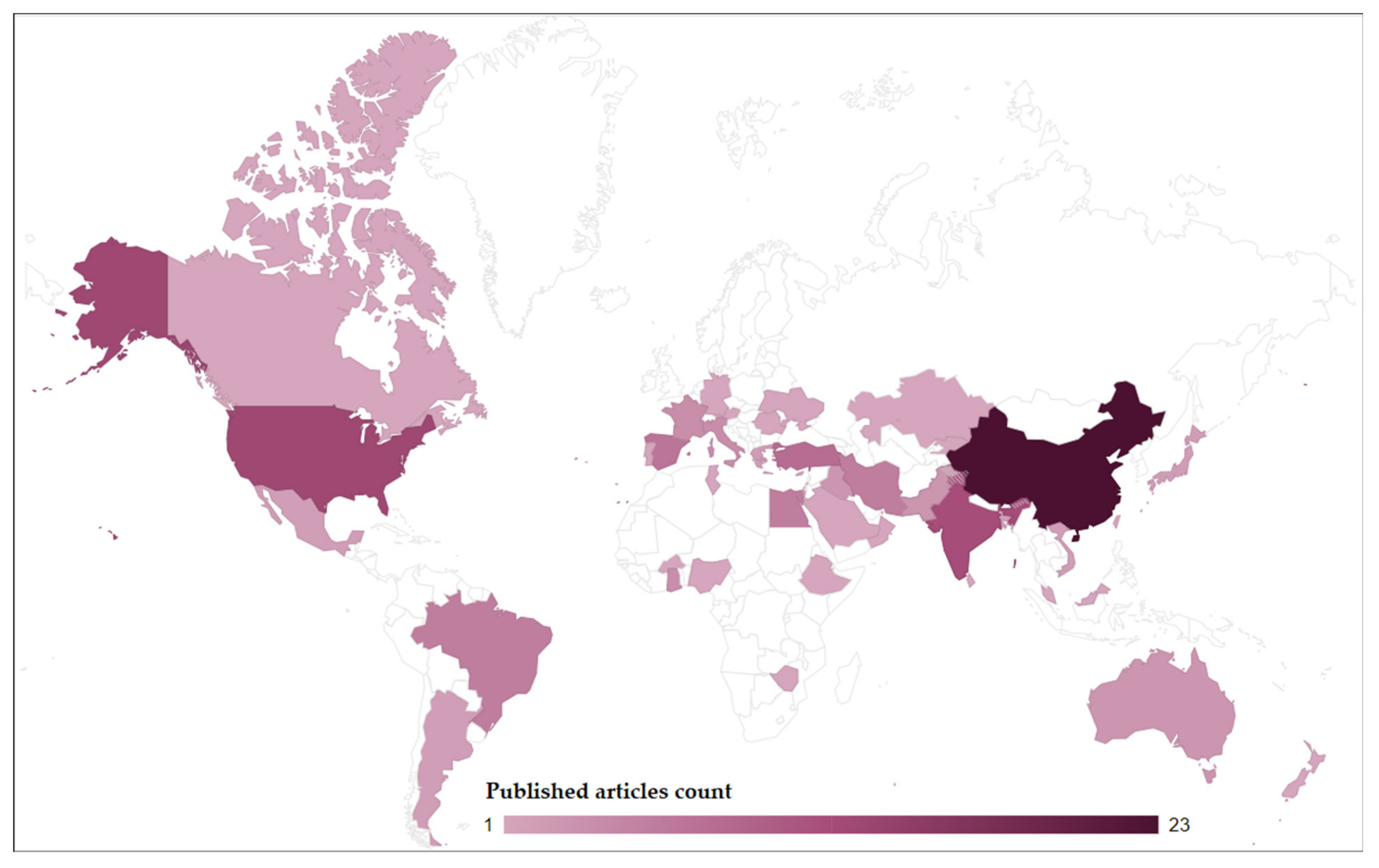
In terms of the spatial distribution, the majority of studies that have hitherto ventured into the utility of drones in mapping water quality parameters such as chlorophyll, turbidity, DO, TSS, and pH were mostly conducted in China, the USA, Latin America, Europe, and Australia (Figure 6). This could be attributed to the fact that the earliest drone technologies began in Europe, the USA, and China between 1849 and 1916. Since then, the technology has been spreading. However, very few studies have been conducted in the global south, especially in Africa. Subsequently, there is a need to consider and prioritise water quality parameters such as chlorophyll, turbidity, DO, TSS, and pH when devising irrigation water quality assessment techniques, especially in the global south.
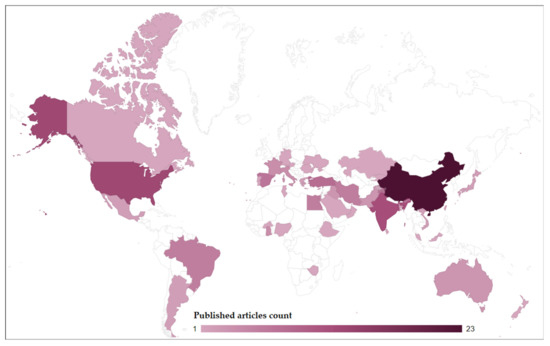
Figure 6.
Spatial distribution of UAV-based remote sensing studies in the context of open water bodies.
3.3. Types of Sensor Platforms
Some of the most widely used satellite platforms are the Landsat, Shuttle Radar topographic mission, MODIS, SPOT, and Sentinel 2 MSI (Figure 4b). Studies involving mapping and monitoring the quality and quantity of surface water bodies based on satellite-borne remotely sensed data have drastically increased. This could be attributed to the significant increase in earth observation technologies. However, no studies were conducted using both satellite and drone data simultaneously (Figure 3). As illustrated in the characterisation of literature, t-studies based on UAVs remotely sensed data only picked up in 2013 (Figure 2 and Figure 6). The increase in the research effort and attention towards the utility of UAVs in relation to satellite-borne data could be explained by that they offer near-real-time, fine resolution, and remotely sensed data suitable for high-throughput quantification of water quantity and quality at user-defined revisit frequencies.
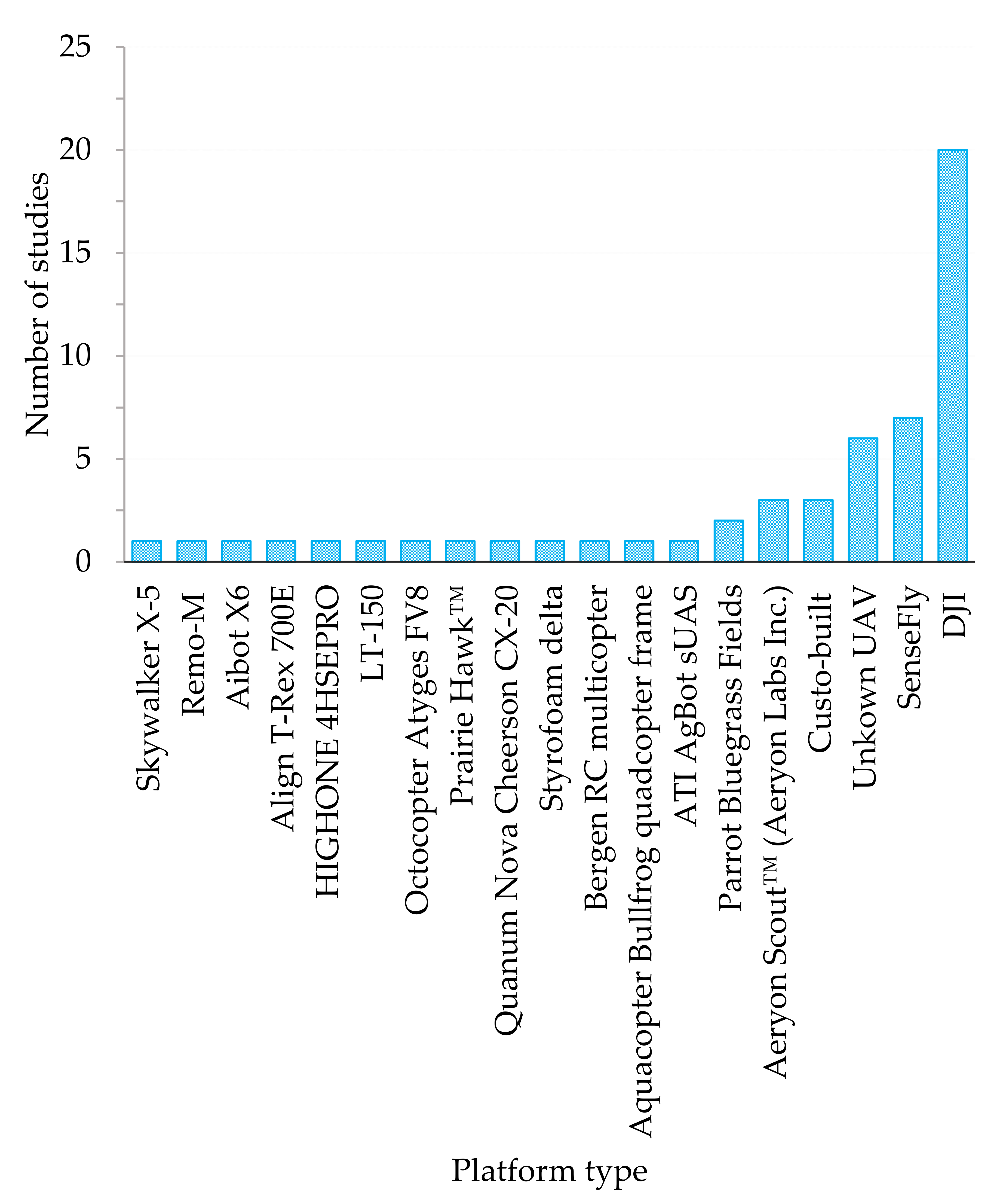
Satellite platforms of freely available datasets such as Sentinel 2 and Landsat tend to be limited by cloud cover and relatively coarser spatial and temporal resolutions, which are difficult to implement at farm scales. The findings of this study also illustrated that 77% of the studies in mapping surface water resources using drones were conducted based on the multi-copter platform systems, and 23% were based on fixed-wing platforms (Table 1). Interestingly, innovative octocopters and hovercrafts have also been harnessed for this particular purpose [25,44]. The dominance of the multi-copter platforms in water resources mapping could be because they are relatively cheaper than fixed-wing platforms [45,46]. Specifically, in their comparative study, Brito et al. (2019) noted that the superiority of the multirotor platforms was established better in the context of two-dimensional mapping surfaces, as is the case with mapping agricultural fields and surface water resources. Above all, the multi-copter platforms were associated with a capability for vertical take-off and landing (VTOL). Most of the DJI multi-copters can VTOL [46]. This makes it easy to utilise multi-copter drones in any environment. However, batteries are their major setback [46]. The weight of multi-copter drone batteries and their capacity limits their flight duration significantly. Specifically, 35% of the studies noted in this study utilised the DJI multi-copter series from the Chinese company, Shenzhen DJI Sciences and Technologies Ltd (Figure 7). This was the most widely used platform based on the findings of this study. Generally, the DJI Matrice and the Phantom series were the dominant DJI platforms noted in our study. This could be attributed to the fact that the DJI Matrice platforms seem to be compatible platforms that can be integrated with many types of sensors, as illustrated in Table 2, when compared to other platforms.
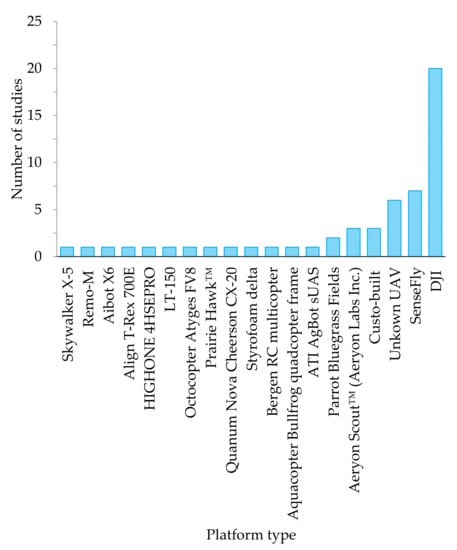
Figure 7.
Frequency and types of UAV platforms that were used in mapping water quality and quantity.
Table 2.
Platforms and sensors that were used in mapping water quality.
Meanwhile, fixed-wing drone platforms’ superiority was reported in mapping linear features (i.e., rivers and roads) [45]. They were also associated with longer flight durations [46]. However, the disadvantage of the fixed-wing drones is that they require a runway, making it challenging to operate them in any environment [46]. Despite these differences, the current drive in the drone technology industry is to harness the VTOL of multi-copters with a long flight time associated with fixed-wing platforms through creating a hybrid VTOL fixed-wing UAV [46].
3.4. Sensors and Spectral Wavebands
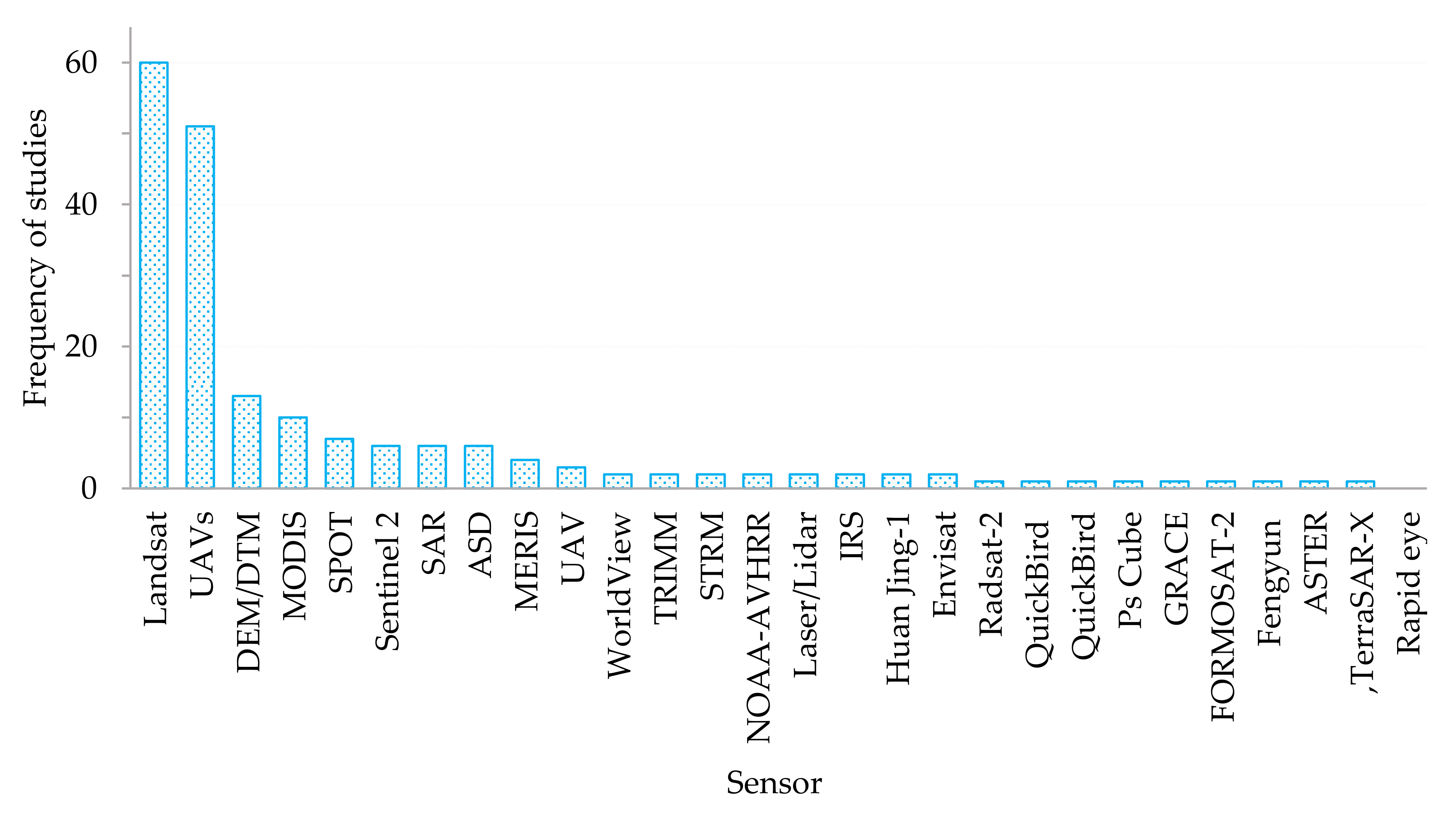
In terms of the sensors, the results of this review showed that from the satellite-borne sensors, Landsat, had been the widest-used sensors for characterising irrigation water quality across the world (Figure 7). Specifically, Landsat 5 was the most widely used sensor with 39 studies, followed by Landsat 8 Operational land Instrument (OLI) with 18 studies and then Landsat 1 with only three studies. These findings were similar to those of Gholizadeh, Melesse, and Reddi [7], who also echoed the dominance of Landsat data in mapping and monitoring water quality. This could be attributed to the fact that Landsat is the longest mission that has been consistently supplying remotely sensed data suitable for a wide variety of applications, including water quality and quantity parameters, without any charges. However, the moderate spatial resolution of Landsat datasets of a 30 m ground sampling distance has limited its applications to regional and landscape scales. Subsequently, there has been a gap at local scales since the available VHSR sensors such as Worldview and QuickBird are associated with high costs.
The advent of drone technologies has seen the utility of sensors, such as Nikon (NIKKOR AF-S 24–85 mm f/3.5–4.5G ED VR) and the Nikon D800 [47], GoPro Hero 4 Black Edition [48], Feiyu Mini 3D Pro [48], Sony [44], and CMOS [49] to the multispectral sensors such as the MicaSense, Parrot Sequoia [28,50,51,52,53,54,55] Sentera [38], MicaSense RedEdge multispectral [29,56], and the hyperspectral sensors such as Headwall Photonics Inc (207 bands), Ocean Optics STS-VIS (640 bands) [27], AvaSpec-dual Gaia (640 bands) [35,57], Sky-mini Nano-Hyperspec [30], Canon EOS 5DS R, and Headwall Nano-Hyperspec (640 bands) for local-scale water remote sensing applications (Table 2). However, as the spectral resolution of drone sensors increases, the associated costs also increase linearly. From our results, it can be observed that the most widely used sensors were the Cannon, Sony, MicaSense, and the Nikon.
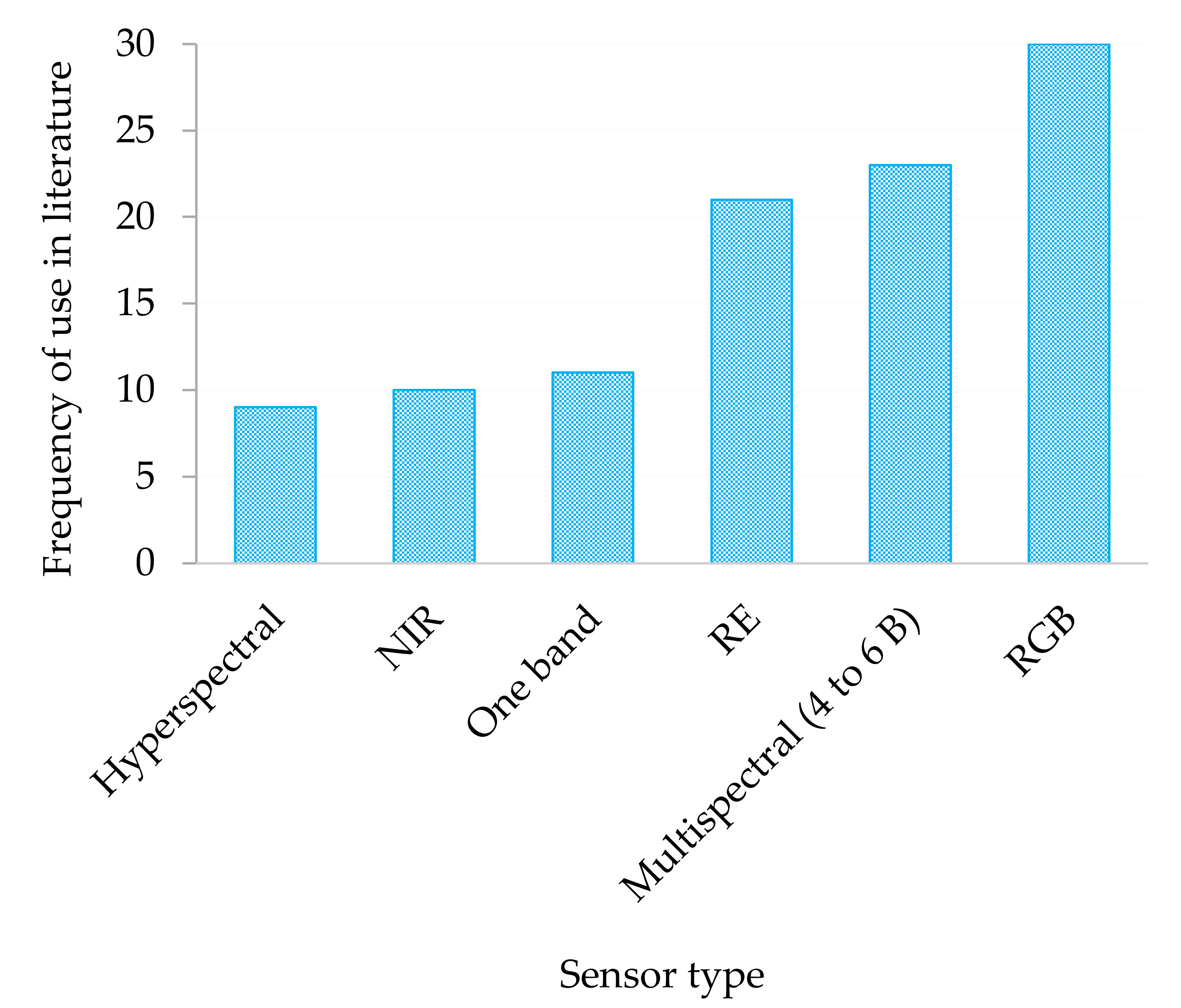
Nevertheless, most of the Cannon, Sony, and Nikon sensors acquire images only in the visible section of the electromagnetic spectrum. They cover the red, green, and blue (RGB) regions of the electromagnetic spectrum (Figure 8). The RGB sections of the electromagnetic spectral alone do not offer sufficient data for extensive applications in areas such as characterising water quality despite their relatively limited costs and very high spatial resolutions in relation to other robust sensors. Meanwhile, the MicaSense series are multispectral cameras that acquire data not only in the visible section, but also cover the red edge and the near-infrared sections of the electromagnetic spectrum at a very high spatial resolution. This makes these the most sought after in the context of characterising a wide variety of applications ranging from the characterisation of vegetation traits to water levels and quality [26,28,29,56]. For example, the MicaSense RedEdge multispectral sensor covers the RGB and the RedEdge, NIR and the thermal infrared portions of the electromagnetic spectrum at an optimal ground sampling distance beyond 4 cm depending on the flight height. These spectral settings make this sensor comparable to the renowned Sentinel 2 multispectral instrument that also covers almost the same spectral regions, save for the thermal infrared section. Based on the findings of this study, there is a growing interest in the utility of hyperspectral sensors in mapping water quality and quantity. Specifically, these hyperspectral sensors cover the spectrum range between 300 and 1000 nm of the electromagnetic spectrum (Table 3). The major advantage of hyperspectral remotely sensed data in water quality remote sensing is the sensitivity to small changes in water quality parameters such as chlorophyll and TSS concentrations. Hyperspectral wavebands have a narrow spectral resolution of about 1–3.5 nm, making them more sensitive in relation to the multispectral drone cameras that are generally broader.
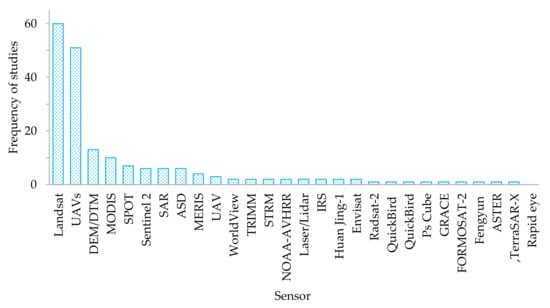
Figure 8.
Satellite-borne sensors that were used in mapping surface water resources.
Table 3.
Details of drone based hyperspectral sensors.
Table 3 illustrates a summary of the technical details of the hyperspectral sensors that were used in mapping water quality and quantity using drones. These sensors typically covered the visible to the NIR sections of the electromagnetic spectrum at very high spatial resolutions. The visible and NIR infrared (VIS-NIR) sections of the electromagnetic spectrum have been widely proven to be instrumental in assessing water quality. The premise that could explain the high frequency in the utility of the RGB spectrum (illustrated in Figure 8) was the relatively lesser costs associated with such three-band sensors. Furthermore, as aforementioned, the ease associated with interpreting the spectral signature of water in the visible and the near-infrared. However, there seems to be limited efforts to evaluate other sections of the electromagnetic spectrum in relation to the VIS–NIR in characterising water quality parameters. Based on the performance of hyperspectral data in other areas of research [58,59], there is a need to test the robustness and capability of the narrow spectral channels in detecting various water quality parameters.
3.5. The Role of Drone Data Derived Vegetation Indices and Machine Algorithms in Remote Sensing Water Quality and Quantity
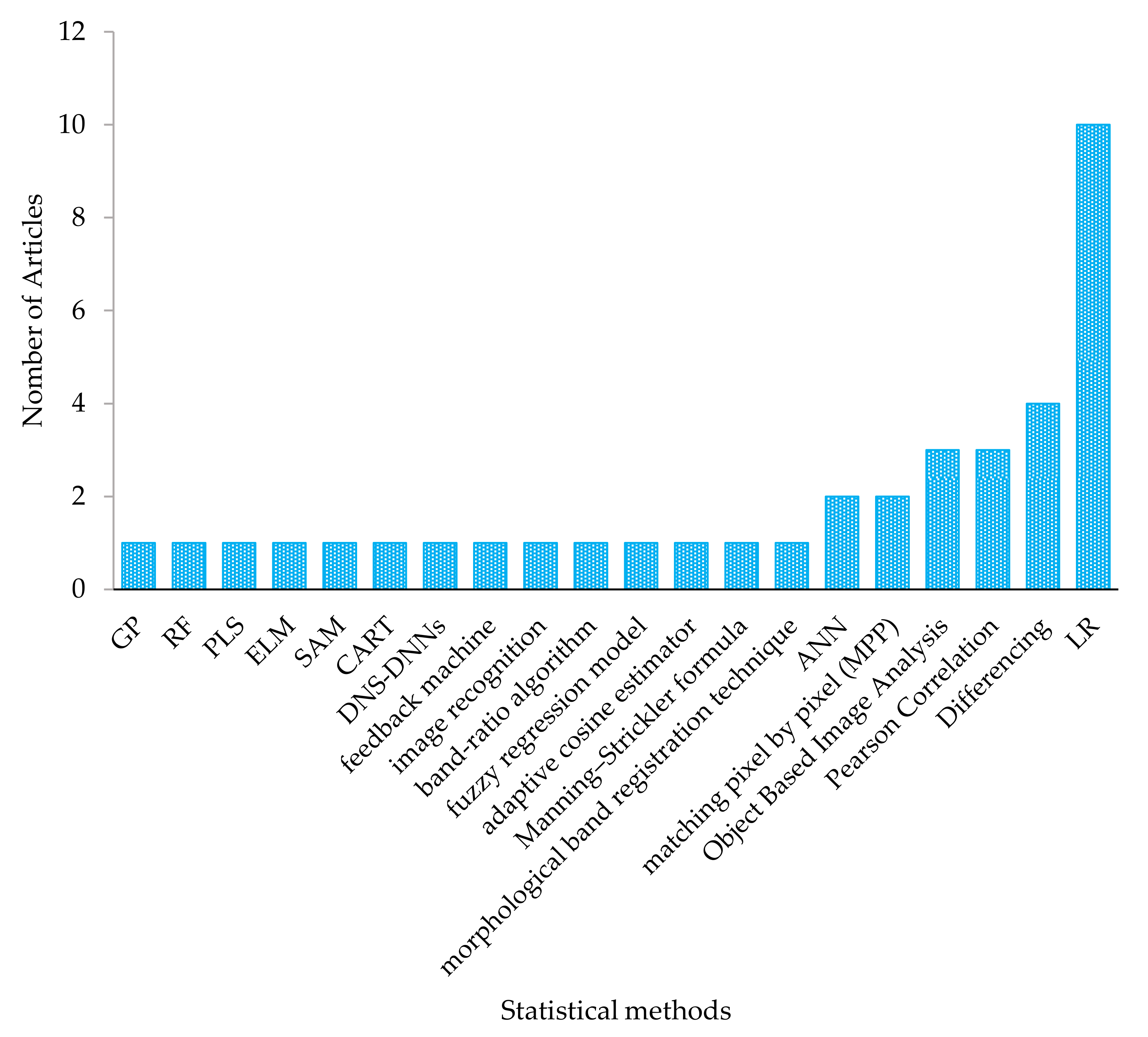
Numerous vegetation indices were derived from drone remotely sensed data for characterising surface water quality and quantity. The most widely used sections of the electromagnetic spectrum in detecting water quality parameters were the visible section (blue and green) and the NIR wavebands. In this regard, vegetation indices such as the red and near-infrared (NIR), Surface Algal Bloom Index (SABI) [60], two-band algorithm (2BDA) [26], NDVI, and Green NDV [33], as well as band combinations and differencing such as (R+NIR/G) were used mostly in characterising chlorophyll content as well as TSS. As was suggested in many studies, the combination of sensitive spectral variables with robust and efficient algorithms produce accurate models. This study noted that algorithms such as linear regression (LR), image differencing, matching pixel-by-pixel (mpp), artificial neural networks (ANN), and the Manning–Strickler and adaptive cosine estimator were utilised in characterising mostly water quality parameters (Figure 9). The mpp based algorithms were also detected during the bibliometric analysis illustrated in Figure 3 (red cluster). Despite being a parametric estimator, LR was the most widely used algorithm because it is simple to implement [61] across various statistical platforms ranging from Microsoft Excel to R statistics. Since LR is a parametric statistic, it requires the data to suit specific assumptions such as normality that are often a challenge to attain. In this regard, there is a need for more efforts in assessing the utility of robust machine learning algorithms such as stochastic gradient boosting, random forest, and the ANN in mapping water quality based on drone remotely sensed data (Figure 10).
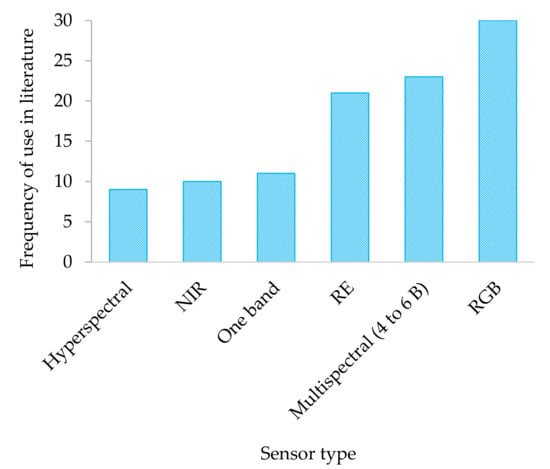
Figure 9.
Spectral resolutions of drone sensors illustrated in Table 1.
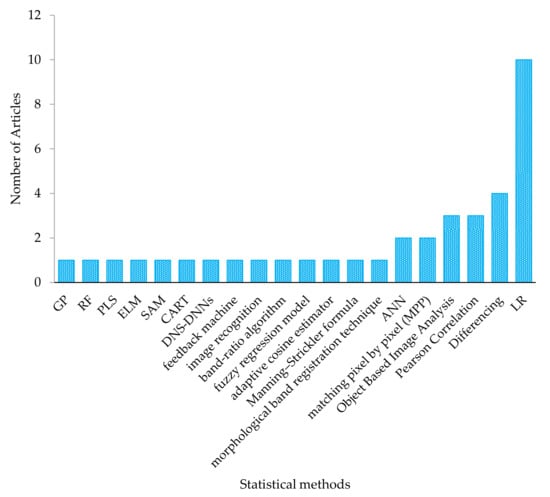
Figure 10.
Algorithms used to detect and map water quality and quantity using drone remotely sensed data.
4. Discussion
4.1. Evolution of Drone Technology Applications in Remote Sensing Water Quality and Quantity
Results in this study showed that the application of drones dates back to the late 1940s. Initially, drones were developed on the offensive as cheap and less risky military airborne fighting machines. With modernisation and the ease of prohibitive regulations, drones became a significant source of spatial data. Specifically, between 2012 and 2014, the United States of America eased the regulations that restricted UAVs for other purposes. Subsequently, the entire global village began to venture into utilising drones in earth observation. It was also observed that studies on the utility of UAVs in mapping and monitoring water quality and quantity are significantly increasing (Figure 4b) [16]. This could be explained by the advancement in drone and sensor technologies as well as the easing of restrictive regulations associated with drone technologies.
Meanwhile, results showed that more efforts from the community of practice were widely exerted towards mapping water quality in relation to water quantity. Specifically, only fourteen studies assessed the level of water, whereas thirty-seven studies assessed water quality parameters based on drone remotely sensed data [44,47,48,49,62,63,64,65,66,67,68,69,70,71,72]. A few examples of studies that mapped water levels included Ridolfi and Manciola [63] who used a method that was based on the Ground Control Points (GCPs) to detect water levels, where water level values were measured using drone-derived data. Meanwhile, Adongo et al. [64] assessed the utility of undertaking bathymetric surveys combined with geographic information systems (GIS) functionalities in remotely determining the reservoir volume of nine irrigation dams in three northern regions of Ghana. On the other hand, the majority of water quality-related studies that were conducted based on drone remotely sensed data, principally mapped and monitored the chlorophyll content [30,32,33,37,38] and turbidity in lakes, ponds and dams (Figure 5b) [34,35,36]. This trend was also revealed through the bibliometric analysis illustrated in Figure 3. Other water quality parameters that were of interest include the chemical oxygen demand (COD) [26,35,73], Secchi disk depth (ZSD) [26,34,74], total nitrogen [35], total phosphorous [35,73], conductivity [24,25,26,73], water quality index [73], pH [27,75], total suspended solids (TSS) [28,29,76], dissolved Oxygen (DO) [75,77], and turbidity [35,48], in order of importance illustrated by their frequency in the literature.
4.2. Challenges in the Application of Drone Technologies with Special Reference to the Global South
The major challenge associated with many regions is the statutory regulations that govern the operation of UAVs [77,78,79]. In many countries, there are still stringent restrictions regarding where and how UAVs are supposed to be operated [16]. In some countries of the global south, the take-off mass, the maximum altitude of flight, and the operational areas of drones tend to be regulated [16]. For instance, the South African Civil Aviation Authority (SACAA) stipulates that remotely piloted aircraft or toy aircraft should not be operated at 50 m or closer to any person or group of persons. It states that remotely piloted aircraft or toy aircraft must not be operated at an altitude higher than 45.72 m (150 ft) from the ground unless approved by the Director of Civil Aviation of the SACAA. Remotely piloted aircraft or toy aircraft weighing more than 7 kg should be operated only if approved by the SACAA (http://www.caa.co.za/pages/rpas/remotely%20piloted%20aircraft%20systems.aspx, accessed on 19 July 2021). The size of the UAV which is often associated with its batteries, engine efficiency, load, and type of UAV (fixed-wing or multi-rotor) tends to determine the length of time it can spend on a single flight plan and the size of the area it can cover [46,79]. In this regard, the regulation on the mass of UAV at taking off tends to indirectly restrict the areal extent that can be covered as well as the size of the camera to be mounted for research purposes, amongst other uses [16,68]. Specifically, due to the weight restrictions, many of the sensor types that are frequently used tend to be lightweight, small-size, and general consumer grades with limited spectral resolutions [15]. Moreover, SACAA states that Remotely Piloted Aircraft Systems (RPAs) shall not be operated beyond the visual-line-of-sight (BVLOS). Insufficient flight autonomy to cover large areas [50] limits the areal extent that can be covered by drones to a farm or field scale. Meanwhile, a supporting regulation and operationalisation of BVLOS drone technology applications will facilitate coverage of greater areas on a single mission. Covering a greater area on a single mission improves the cost-effectiveness in the acquisition of VHR imagery. This will increase the prospects of drone applications in covering large dams and lakes in mapping and monitoring water quality and quantity. Further advancements and improvements towards the automation of drone operations will sanction routine monitoring and mapping applications. This study shows that single and three-band cameras are the most widely used sensors in characterising water quality parameters (Table 1 and Figure 6).
The SACAA stipulates a need for a pilot license to operate UAVs for commercial purposes in South Africa. However, the Eighth Amendment of the Civil Aviation Regulations, 2011, which came into operation on 1 July 2015, contains Part 101 on Remotely Piloted Aircraft Systems, states that
“2.3 …the SACAA acknowledges that many entrepreneurs interested in obtaining a Remotely Piloted Aircraft Systems Operator Certificate (ROC) to provide aerial services, for example, real estate photography, academia etc. are not aviation professionals. As such, they have limited aviation backgrounds, and a lack knowledge about existing flight and airspace regulations. To protect the safety of the public and for these individuals to become viable UAS operators, they need to be aware of the requirements and the process. UAS operators, in turn, must be informed on the current regulations, policies and procedures to develop safe business practices in a similar fashion to professional “manned” aviation companies” (source: http://www.caa.co.za/RPAS%20AICs/AIC%20007-2015.pdf, accessed on 19 July 2021).
Meanwhile, the process of acquiring a licence costs about USD1500–2000. On the other hand, the prices of drone platforms and cameras remain high and beyond the reach of many researchers. Drone platforms with the capability of mounting various cameras generally vary between USD1000 and 10,000, inclusive of the sensor; hence, they are not accessible for research purposes in most Southern African countries. Only the affordable small platforms restricted in terms of sensors type (spectral and spatial resolution), flight height, and flight time are easily accessible and widely used for recreational purposes. This current review highlights the current state of affairs (opportunities and challenges) associated with research using cutting-edge drone technologies, especially to some of the countries in the global south. Although highlighting limitations such as the lack of funding, laboratories, and human capacity, this study sought to expose the plausible opportunities associated with these technologies. In this regard, this work will invoke ways in which researchers in countries of the global south can be aware of the prospects of UAV technologies and seek collaborations with countries of the global north. For instance, UNICEF, Virginia Polytechnic Institute, and State University, commonly known as Virginia Tech, joined the Government of Malawi in establishing The African Drone and Data Academy (ADDA) (https://www.unicef.org/malawi/african-drone-and-data-academy-malawi, accessed on 19 July 2021). The ADDA aimed to be a centre of excellence for dually equipping young people in Malawi and the African region with necessary 21st-century skills, while strengthening the drone ecosystem for a more effective humanitarian and development response in Southern Africa.
Mapping water volume using drone remotely sensed data is also one of the major challenges in the global south and across all continents. In mapping such complex channel bathymetric characteristics, there is a need for robust sensor systems that could penetrate water in detecting the water body’s volume. Active sensors could be suitable for this procedure in conjunction with robust machine learning algorithms.
4.3. Research Gaps and Opportunities
The following gaps were identified from the results of this study in the context of irrigation water quantity and quality monitoring based on drone remotely sensed data:
- There are a limited number of studies that have sought to evaluate the utility of drone remotely sensed data in the global south;
- The assessment of water quality using multispectral and hyperspectral drone sensors has not attracted much attention from the research community;
- There are very few studies that have assessed the utility of robust nonparametric machine learning algorithms for water;
- Few studies have sought to evaluate and exploit the possible synergies between drone and satellite bone datasets, especially since the launch of Sentinel 2 MSI, which is freely available;
- Limited research attention has been given towards mapping water quality and quantity in open water reservoirs supplying smallholder farms;
- Furthermore, as noted in the literature (Lally et al., 2019; Koparan et al., 2018a), there is still a gap in the real-time use of drone-mounted monitoring probes in testing and monitoring water quality parameters.
4.4. Way Forward: Closing the Gaps in the Utilisation of Drone Technology in Mapping Water Quality and Quantity
Research efforts need to be promoted to evaluate UAVs’ utility in monitoring irrigation water quality and quantity, especially in the global south’s smallholder farms that are susceptible to climate variability shocks and unpredictable rains. As the fourth industrial revolution is progressing, UAVs are emerging as an innovative source of near-real-time spatial data for mapping and monitoring surface water resources to improve the agricultural sector productivity. Drone data have high prospects of providing well-calibrated, time-efficient, and spatially explicit data models on water quantity and quality. In this regard, the application of multispectral sensors in characterising surface water levels and water quality needs to be conducted if a sustainable utilisation of water resources and water security is to be achieved in the light of the rapidly growing population and its associated water demands. Since the current focus in the agricultural sector is towards reducing the amount of irrigation water while increasing agricultural productivity, timely and accurate fine spatial resolution data derived using drones such as the DJI series in concert with multispectral sensors such as the Mica sense and hyperspectral sensors such as the Headwall Nano-Hyperspec could be useful in detecting and mapping the spatio–temporal variability of available irrigation water quality and volume at field levels. Field-level near real-time fine resolution, spatially explicit information on water quality, and quantity models are useful in informing smallholder farmers in the field and policymakers away from the fields about water leakages occurring at the grassroots level. Near-real-time fine resolution and information on water quality and quantity will help farmers plan their irrigation schedules, resulting in limited water leakages and losses while improving productivity. This is very critical in reducing further strains on the already stressed-out water resources. This evidence-based, timely information on the available water resources is critical for farmers to suit their irrigation water management strategies based on in-field spatial variability and seasonal changes in water quantity and quality. Subsequently, formulating robust and effective local-to-regional frameworks and policies to facilitate sustainable utilisation and water management are more likely to be achieved.
5. Conclusions
The objective of this study was to conduct a systematic review, assess progress, opportunities, and challenges for using drone-derived remotely sensed data to map and model water quality and quantity. The utility of UAVs globally in mapping and monitoring the amount of surface water and its quality at a farm scale is still in its infancy. This is partly due to high costs, a lack of personnel with the requisite skills, and the stringent regulations of securing and operating drones. Nevertheless, drones are cutting-edge technology with high prospects of providing spatially explicit, timely, robust, and reliable surface water resources accounting. There is a need to swiftly embrace this technology to minimize water leakages for improving on-farm irrigation strategies, and draw local, regional, and national strategies and policies focusing on the sustainable utilisation of water to reduce the strain on the already stressed water resources. There is room for research on a wide range of aspects on the quality and quantity of irrigation water in situ, which require research efforts and integration with other upcoming innovative technologies such as artificial intelligence and deep learning computer advances.
Author Contributions
Conceptualization, M.S., V.G.P.C. and T.M.; methodology, V.G.P.C., M.S., and T.M.; investigation, M.S., V.G.P.C., T.D., T.M. and O.M.; resources, T.M. and O.M.; data curation and analyses, M.S. and V.G.P.C.; writing—original draft preparation, M.S., V.G.P.C., T.D. and T.M.; writing—review and editing, M.S., V.G.P.C., T.D., T.M., D.M., A.D.C., C.S., and O.M.; visualization, M.S. and V.G.P.C., project administration, T.M.; funding acquisition, T.M.; critical review and redrafting, M.S., V.G.P.C., T.D., D.M., A.D.C., C.S., T.M. and O.M. All authors have read and agreed to the published version of the manuscript.
Funding
The Water Research Commission of South Africa is acknowledged for funding through the WRC Project, No. K5/2791//4, ‘Use of drones to monitor crop health, water stress, crop water requirements and improve crop water productivity to enhance precision agriculture and irrigation scheduling’. This work was also based on the research supported in part by the National Research Foundation of South Africa (grant number 119409).
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Stephens, G.L.; Slingo, J.M.; Rignot, E.; Reager, J.T.; Hakuba, M.Z.; Durack, P.J.; Worden, J.; Rocca, R. Earth’s water reservoirs in a changing climate. Proc. R. Soc. A 2020, 476, 20190458. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- FAO. World Food and Agriculture—Statistical Pocketbook; FAO: Rome, Italy, 2018. [Google Scholar]
- Finley, J.W.; Seiber, J.N. The nexus of food, energy, and water. J. Agric. Food Chem. 2014, 62, 6255–6262. [Google Scholar] [CrossRef]
- Fischer, G. World food and agriculture to 2030/50. In Technical Paper for the Expert Meeting on “How to Feed the World”; FAO: Rome, Italy, 2009; pp. 24–26. [Google Scholar]
- Bronkhorst, S.; Pengelly, C.; Seyler, H. Water 2017 Market Intelligence Report; Greencape: Cape Town, South Africa, 2017. [Google Scholar]
- Von Bormann, T.; Gulati, M. The Food Energy Water Nexus: Understanding South Africa’s Most Urgent Sustainability Challenge; WWF-SA: Western Cape, South Africa, 2014; pp. 1–35. [Google Scholar]
- Gholizadeh, M.H.; Melesse, A.M.; Reddi, L. A comprehensive review on water quality parameters estimation using remote sensing techniques. Sensors 2016, 16, 1298. [Google Scholar] [CrossRef] [Green Version]
- Palmer, K.F.; Williams, D. Optical properties of water in the near infrared. JOSA 1974, 64, 1107–1110. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Arnone, R.A. Deriving inherent optical properties from water color: A multiband quasi-analytical algorithm for optically deep waters. Appl. Opt. 2002, 41, 5755–5772. [Google Scholar] [CrossRef] [PubMed]
- Ovakoglou, G.; Alexandridis, T.K.; Crisman, T.L.; Skoulikaris, C.; Vergos, G.S. Use of MODIS satellite images for detailed lake morphometry: Application to basins with large water level fluctuations. Int. J. Appl. Earth Obs. Geoinf. 2016, 51, 37–46. [Google Scholar] [CrossRef]
- Dube, T.; Sibanda, M.; Shoko, C. Examining the variability of small-reservoir water levels in semi-arid environments for integrated water management purposes, using remote sensing. Trans. R. Soc. S. Afr. 2016, 71, 115–119. [Google Scholar] [CrossRef]
- Sallam, A.; Alharbi, A.B.; Usman, A.R.; Hussain, Q.; Ok, Y.S.; Alshayaa, M.; Al-Wabel, M. Environmental consequences of dam construction: A case study from Saudi Arabia. Arab. J. Geosci. 2018, 11, 1–12. [Google Scholar] [CrossRef]
- Ismail, M. Remote Sensing as a Tool in Assessing Water Quality. Life Sci. J. 2012, 9, 246–252. [Google Scholar]
- Campbell, G.; Phinn, S.R.; Dekker, A.G.; Brando, V.E. Remote sensing of water quality in an Australian tropical freshwater impoundment using matrix inversion and MERIS images. Remote Sens. Environ. 2011, 115, 2402–2414. [Google Scholar] [CrossRef] [Green Version]
- Xiang, T.-Z.; Xia, G.-S.; Zhang, L. Mini-Unmanned Aerial Vehicle-Based Remote Sensing: Techniques, applications, and prospects. IEEE Geosci. Remote Sens. Mag. 2019, 7, 29–63. [Google Scholar] [CrossRef] [Green Version]
- Lally, H.; O’Connor, I.; Jensen, O.; Graham, C. Can drones be used to conduct water sampling in aquatic environments? A review. Sci. Total Environ. 2019, 670, 569–575. [Google Scholar] [CrossRef] [PubMed]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef] [Green Version]
- Cancela, J.J.; González, X.P.; Vilanova, M.; Mirás-Avalos, J.M. Water management using drones and satellites in agriculture. Water 2019, 11, 874. [Google Scholar] [CrossRef] [Green Version]
- Small, H. Co-citation in the scientific literature: A new measure of the relationship between two documents. J. Am. Soc. Inf. Sci. 1973, 24, 265–269. [Google Scholar] [CrossRef]
- Lozano, S.; Calzada-Infante, L.; Adenso-Díaz, B.; García, S. Complex network analysis of keywords co-occurrence in the recent efficiency analysis literature. Scientometrics 2019, 120, 609–629. [Google Scholar] [CrossRef]
- Van Eck, N.J.; Waltman, L. Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef] [Green Version]
- Moher, D.; Shamseer, L.; Clarke, M.; Ghersi, D.; Liberati, A.; Petticrew, M.; Shekelle, P.; Stewart, L.A. Preferred reporting items for systematic review and meta-analysis protocols (PRISMA-P) 2015 statement. Syst. Rev. 2015, 4, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Shamseer, L.; Moher, D.; Clarke, M.; Ghersi, D.; Liberati, A.; Petticrew, M.; Shekelle, P.; Stewart, L.A. Preferred reporting items for systematic review and meta-analysis protocols (PRISMA-P) 2015: Elaboration and explanation. BMJ 2015, 349, g7647. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Koparan, C.; Koc, A.; Privette, C.; Sawyer, C.; Sharp, J. Evaluation of a UAV-Assisted Autonomous Water Sampling. Water 2018, 10, 655. [Google Scholar] [CrossRef] [Green Version]
- Koparan, C.; Koc, A.B.; Privette, C.V.; Sawyer, C.B. In Situ Water Quality Measurements Using an Unmanned Aerial Vehicle (UAV) System. Water 2018, 10, 264. [Google Scholar] [CrossRef] [Green Version]
- Cillero Castro, C.; Dominguez Gomez, J.A.; Delgado Martin, J.; Hinojo Sanchez, B.A.; Cereijo Arango, J.L.; Cheda Tuya, F.A.; Diaz-Varela, R. An UAV and Satellite Multispectral Data Approach to Monitor Water Quality in Small Reservoirs. Remote Sens. 2020, 12, 1514. [Google Scholar] [CrossRef]
- Zeng, C.; Richardson, M.; King, D.J. The impacts of environmental variables on water reflectance measured using a lightweight unmanned aerial vehicle (UAV)-based spectrometer system. ISPRS J. Photogramm. Remote Sens. 2017, 130, 217–230. [Google Scholar] [CrossRef]
- Larson, M.D.; Simic Milas, A.; Vincent, R.K.; Evans, J.E. Multi-depth suspended sediment estimation using high-resolution remote-sensing UAV in Maumee River, Ohio. Int. J. Remote Sens. 2018, 39, 5472–5489. [Google Scholar] [CrossRef]
- Ying, H.; Xia, K.; Huang, X.; Feng, H.; Yang, Y.; Du, X.; Huang, L. Evaluation of water quality based on UAV images and the IMP-MPP algorithm. Ecol. Inform. 2021, 61, 101239. [Google Scholar] [CrossRef]
- Kwon, Y.S.; Pyo, J.; Kwon, Y.-H.; Duan, H.; Cho, K.H.; Park, Y. Drone-based hyperspectral remote sensing of cyanobacteria using vertical cumulative pigment concentration in a deep reservoir. Remote Sens. Environ. 2020, 236, 416. [Google Scholar] [CrossRef]
- Kim, G.; Baek, I.; Stocker, M.D.; Smith, J.E.; Van Tassell, A.L.; Qin, J.; Chan, D.E.; Pachepsky, Y.; Kim, M.S. Hyperspectral Imaging from a Multipurpose Floating Platform to Estimate Chlorophyll-a Concentrations in Irrigation Pond Water. Remote Sens. 2020, 12, 2070. [Google Scholar] [CrossRef]
- Cheng, K.H.; Chan, S.N.; Lee, J.H.W. Remote sensing of coastal algal blooms using unmanned aerial vehicles (UAVs). Mar. Pollut. Bull. 2020, 152, 110889. [Google Scholar] [CrossRef]
- Guimarães, T.; Veronez, M.; Koste, E.; Gonzaga, L.; Bordin, F.; Inocencio, L.; Larocca, A.; de Oliveira, M.; Vitti, D.; Mauad, F. An Alternative Method of Spatial Autocorrelation for Chlorophyll Detection in Water Bodies Using Remote Sensing. Sustainability 2017, 9, 416. [Google Scholar] [CrossRef] [Green Version]
- Su, T.-C.; Chou, H.-T. Application of Multispectral Sensors Carried on Unmanned Aerial Vehicle (UAV) to Trophic State Mapping of Small Reservoirs: A Case Study of Tain-Pu Reservoir in Kinmen, Taiwan. Remote Sens. 2015, 7, 10078–10097. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Wu, L.; Ren, H.; Liu, Y.; Zheng, Y.; Liu, Y.; Dong, J. Mapping Water Quality Parameters in Urban Rivers from Hyperspectral Images Using a New Self-Adapting Selection of Multiple Artificial Neural Networks. Remote Sens. 2020, 12, 336. [Google Scholar] [CrossRef] [Green Version]
- Vogt, M.C.; Vogt, M.E. Research Article: Near-Remote Sensing of Water Turbidity Using Small Unmanned Aircraft Systems. Environ. Pract. 2017, 18, 18–31. [Google Scholar] [CrossRef]
- Flynn, K.; Chapra, S. Remote Sensing of Submerged Aquatic Vegetation in a Shallow Non-Turbid River Using an Unmanned Aerial Vehicle. Remote Sens. 2014, 6, 12815–12836. [Google Scholar] [CrossRef] [Green Version]
- McEliece, R.; Hinz, S.; Guarini, J.-M.; Coston-Guarini, J. Evaluation of Nearshore and Offshore Water Quality Assessment Using UAV Multispectral Imagery. Remote Sens. 2020, 12, 2258. [Google Scholar] [CrossRef]
- Malakar, A.; Snow, D.D.; Ray, C. Irrigation Water Quality—A Contemporary Perspective. Water 2019, 11, 1482. [Google Scholar] [CrossRef] [Green Version]
- Frenkel, H. Reassessment of water quality criteria for irrigation. In Ecological Studies: Analysis and Synthesis; Springer-Verlag: New York, NY, USA, 1984. [Google Scholar]
- Bauder, T.A.; Waskom, R.; Sutherland, P.; Davis, J. Irrigation Water Quality Criteria; Colorado State University: Fort Collins, CO, USA, 2011. [Google Scholar]
- Jeong, H.; Kim, H.; Jang, T. Irrigation water quality standards for indirect wastewater reuse in agriculture: A contribution toward sustainable wastewater reuse in South Korea. Water 2016, 8, 169. [Google Scholar] [CrossRef] [Green Version]
- Sengupta, M.E.; Keraita, B.; Olsen, A.; Boateng, O.K.; Thamsborg, S.M.; Pálsdóttir, G.R.; Dalsgaard, A. Use of Moringa oleifera seed extracts to reduce helminth egg numbers and turbidity in irrigation water. Water Res. 2012, 46, 3646–3656. [Google Scholar] [CrossRef]
- Schumann, G.J.-P.; Muhlhausen, J.; Andreadis, K.M. Rapid Mapping of Small-Scale River-Floodplain Environments Using UAV SfM Supports Classical Theory. Remote Sens. 2019, 11, 982. [Google Scholar] [CrossRef] [Green Version]
- Brito, R.C.; Lorencena, M.C.; Loureiro, J.F.; Favarim, F.; Todt, E. A comparative approach on the use of unmanned aerial vehicles kind of fixed-wing and rotative wing applied to the precision agriculture scenario. In Proceedings of the 2019 IEEE 43rd Annual Computer Software and Applications Conference (COMPSAC), Milwaukee, WI, USA, 15–19 July 2019; pp. 522–526. [Google Scholar]
- Zaludin, Z.; Harituddin, A.S.M. Challenges and Trends of Changing from Hover to Forward Flight for a Converted Hybrid Fixed Wing VTOL UAS from Automatic Flight Control System Perspective. In Proceedings of the 2019 IEEE 9th International Conference on System Engineering and Technology (ICSET), Shah Alam, Malaysia, 7 October 2019; pp. 247–252. [Google Scholar]
- Tymków, P.; Jóźków, G.; Walicka, A.; Karpina, M.; Borkowski, A. Identification of Water Body Extent Based on Remote Sensing Data Collected with Unmanned Aerial Vehicle. Water 2019, 11, 338. [Google Scholar] [CrossRef] [Green Version]
- Ventura, D.; Bonifazi, A.; Gravina, M.F.; Belluscio, A.; Ardizzone, G. Mapping and Classification of Ecologically Sensitive Marine Habitats Using Unmanned Aerial Vehicle (UAV) Imagery and Object-Based Image Analysis (OBIA). Remote Sens. 2018, 10, 1331. [Google Scholar] [CrossRef] [Green Version]
- Lou, H.; Wang, P.; Yang, S.; Hao, F.; Ren, X.; Wang, Y.; Shi, L.; Wang, J.; Gong, T. Combining and Comparing an Unmanned Aerial Vehicle and Multiple Remote Sensing Satellites to Calculate Long-Term River Discharge in an Ungauged Water Source Region on the Tibetan Plateau. Remote Sens. 2020, 12, 2155. [Google Scholar] [CrossRef]
- Olivetti, D.; Roig, H.; Martinez, J.-M.; Borges, H.; Ferreira, A.; Casari, R.; Salles, L.; Malta, E. Low-Cost Unmanned Aerial Multispectral Imagery for Siltation Monitoring in Reservoirs. Remote Sens. 2020, 12, 1855. [Google Scholar] [CrossRef]
- Kim, E.-J.; Nam, S.-H.; Koo, J.-W.; Hwang, T.-M. Hybrid Approach of Unmanned Aerial Vehicle and Unmanned Surface Vehicle for Assessment of Chlorophyll-a Imagery Using Spectral Indices in Stream, South Korea. Water 2021, 13, 1930. [Google Scholar] [CrossRef]
- Brinkhoff, J.; Hornbuckle, J.; Barton, J.L. Assessment of Aquatic Weed in Irrigation Channels Using UAV and Satellite Imagery. Water 2018, 10, 1497. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Hawthorne, T.L.; Torres, H.; Feinman, M. Using object-oriented classification for coastal management in the east central coast of Florida: A quantitative comparison between UAV, satellite, and aerial data. Drones 2019, 3, 60. [Google Scholar] [CrossRef] [Green Version]
- Freitas, P.; Vieira, G.; Canário, J.; Folhas, D.; Vincent, W.F. Identification of a threshold minimum area for reflectance retrieval from thermokarst lakes and ponds using full-pixel data from Sentinel-2. Remote Sens. 2019, 11, 657. [Google Scholar] [CrossRef] [Green Version]
- Wojcik, K.A.; Bialik, R.J.; Osinska, M.; Figielski, M. Investigation of Sediment-Rich Glacial Meltwater Plumes Using a High-Resolution Multispectral Sensor Mounted on an Unmanned Aerial Vehicle. Water 2019, 11, 2405. [Google Scholar] [CrossRef] [Green Version]
- Kim, W.; Jung, S.; Moon, Y.; Mangum, S.C. Morphological Band Registration of Multispectral Cameras for Water Quality Analysis with Unmanned Aerial Vehicle. Remote Sens. 2020, 12, 2024. [Google Scholar] [CrossRef]
- Shang, S.; Lee, Z.; Lin, G.; Hu, C.; Shi, L.; Zhang, Y.; Li, X.; Wu, J.; Yan, J. Sensing an intense phytoplankton bloom in the western Taiwan Strait from radiometric measurements on a UAV. Remote Sens. Environ. 2017, 198, 85–94. [Google Scholar] [CrossRef]
- Mutanga, O.; Van Aardt, J.; Kumar, L. Imaging spectroscopy (hyperspectral remote sensing) in southern Africa: An overview. S. Afr. J. Sci. 2009, 105, 193–198. [Google Scholar] [CrossRef]
- Khan, M.J.; Khan, H.S.; Yousaf, A.; Khurshid, K.; Abbas, A. Modern trends in hyperspectral image analysis: A review. IEEE Access 2018, 6, 14118–14129. [Google Scholar] [CrossRef]
- Alawadi, F. Detection of surface algal blooms using the newly developed algorithm surface algal bloom index (SABI). In Remote Sensing of the Ocean, Sea Ice, and Large Water Regions 2010; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; p. 782506. [Google Scholar]
- Harrington, J.A., Jr.; Schiebe, F.R.; Nix, J.F. Remote sensing of Lake Chicot, Arkansas: Monitoring suspended sediments, turbidity, and Secchi depth with Landsat MSS data. Remote Sens. Environ. 1992, 39, 15–27. [Google Scholar] [CrossRef]
- Templin, T.; Popielarczyk, D.; Kosecki, R. Application of low-cost fixed-wing UAV for inland lakes shoreline investigation. Pure Appl. Geophys. 2018, 175, 3263–3283. [Google Scholar] [CrossRef] [Green Version]
- Ridolfi, E.; Manciola, P. Water Level Measurements from Drones: A Pilot Case Study at a Dam Site. Water 2018, 10, 297. [Google Scholar] [CrossRef] [Green Version]
- Adongo, T.A.; Kyei-Baffour, N.; Abagale, F.K.; Agyare, W.A. Assessment of reservoir sedimentation of irrigation dams in northern Ghana. Lake Reserv. Manag. 2020, 36, 87–105. [Google Scholar] [CrossRef]
- Tamminga, A.; Hugenholtz, C.; Eaton, B.; Lapointe, M. Hyperspatial remote sensing of channel reach morphology and hydraulic fish habitat using an unmanned aerial vehicle (uav): a first assessment in the context of river research and management. River Res. Appl. 2015, 31, 379–391. [Google Scholar] [CrossRef]
- Rahman, M.M.; McDermid, G.J.; Strack, M.; Lovitt, J. A New Method to Map Groundwater Table in Peatlands Using Unmanned Aerial Vehicles. Remote Sens. 2017, 9, 1057. [Google Scholar] [CrossRef] [Green Version]
- Lovitt, J.; Rahman, M.M.; Saraswati, S.; McDermid, G.J.; Strack, M.; Xu, B. UAV Remote Sensing Can Reveal the Effects of Low-Impact Seismic Lines on Surface Morphology, Hydrology, and Methane (CH4) Release in a Boreal Treed Bog. J. Geophys. Res. Biogeosciences 2018, 123, 1117–1129. [Google Scholar] [CrossRef] [Green Version]
- Flener, C.; Vaaja, M.; Jaakkola, A.; Krooks, A.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppa, H.; Hyyppa, J.; Alho, P. Seamless Mapping of River Channels at High Resolution Using Mobile LiDAR and UAV-Photography. Remote Sens. 2013, 5, 6382–6407. [Google Scholar] [CrossRef] [Green Version]
- Bandini, F.; Olesen, D.; Jakobsen, J.; Kittel, C.M.M.; Wang, S.; Garcia, M.; Bauer-Gottwein, P. Technical note: Bathymetry observations of inland water bodies using a tethered single-beam sonar controlled by an unmanned aerial vehicle. Hydrol. Earth Syst. Sci. 2018, 22, 4165–4181. [Google Scholar] [CrossRef] [Green Version]
- Gao, A.; Wu, S.; Wang, F.; Wu, X.; Xu, P.; Yu, L.; Zhu, S. A Newly Developed Unmanned Aerial Vehicle (UAV) Imagery Based Technology for Field Measurement of Water Level. Water 2019, 11, 124. [Google Scholar] [CrossRef] [Green Version]
- Feng, Q.; Liu, J.; Gong, J. Urban Flood Mapping Based on Unmanned Aerial Vehicle Remote Sensing and Random Forest Classifier—A Case of Yuyao, China. Water 2015, 7, 1437–1455. [Google Scholar] [CrossRef]
- Rossi, L.; Mammi, I.; Pelliccia, F. UAV-derived multispectral bathymetry. Remote Sens. 2020, 12, 3897. [Google Scholar] [CrossRef]
- Kageyama, Y.; Takahashi, J.; Nishida, M.; Kobori, B.; Nagamoto, D. Analysis of Water Quality in Miharu Dam Reservoir, Japan, using UAV Data. IEEJ Trans. Electr. Electron. Eng. 2016, 11, S183–S185. [Google Scholar] [CrossRef]
- Su, T.-C. A study of a matching pixel by pixel (MPP) algorithm to establish an empirical model of water quality mapping, as based on unmanned aerial vehicle (UAV) images. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 213–224. [Google Scholar] [CrossRef]
- Banerjee, B.P.; Raval, S.; Maslin, T.J.; Timms, W. Development of a UAV-mounted system for remotely collecting mine water samples. Int. J. Min. Reclam. Environ. 2018, 34, 385–396. [Google Scholar] [CrossRef]
- Guimarães, T.T.; Veronez, M.R.; Koste, E.C.; Souza, E.M.; Brum, D.; Gonzaga, L.; Mauad, F.F. Evaluation of Regression Analysis and Neural Networks to Predict Total Suspended Solids in Water Bodies from Unmanned Aerial Vehicle Images. Sustainability 2019, 11, 2580. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Yue, X.; Wang, H.; Ling, K.; Liu, Y.; Wang, J.; Hong, J.; Pen, W.; Song, H. Dynamic Inversion of Inland Aquaculture Water Quality Based on UAVs-WSN Spectral Analysis. Remote Sens. 2020, 12, 402. [Google Scholar] [CrossRef] [Green Version]
- Rhee, D.S.; Kim, Y.D.; Kang, B.; Kim, D. Applications of unmanned aerial vehicles in fluvial remote sensing: An overview of recent achievements. KSCE J. Civ. Eng. 2017, 22, 588–602. [Google Scholar] [CrossRef]
- Cracknell, A.P. UAVs: Regulations and law enforcement. Int. J. Remote Sens. 2017, 38, 3054–3067. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).