
Surveys of Large Waterfowl and Their Habitats Using an Unmanned Aerial Vehicle: A Case Study on the Siberian Crane



Abstract
:1. Introduction
2. Materials and Methods
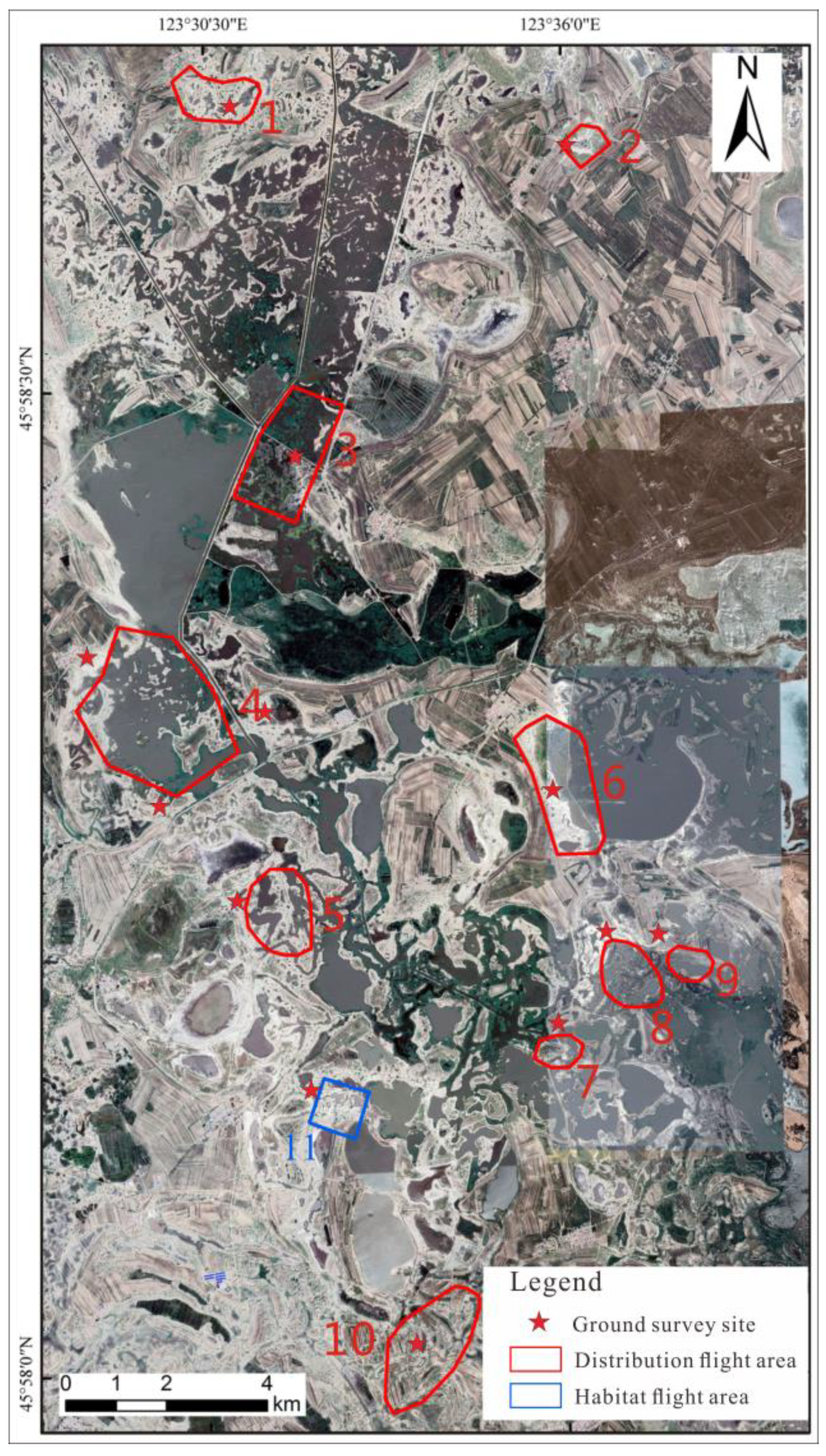
2.1. Study Area and Species Selection
2.2. UAV Selection and Survey Method
2.3. Data Acquisition
2.3.1. Habitat Flight Method
2.3.2. Distribution Flight Method
2.4. Data Processing
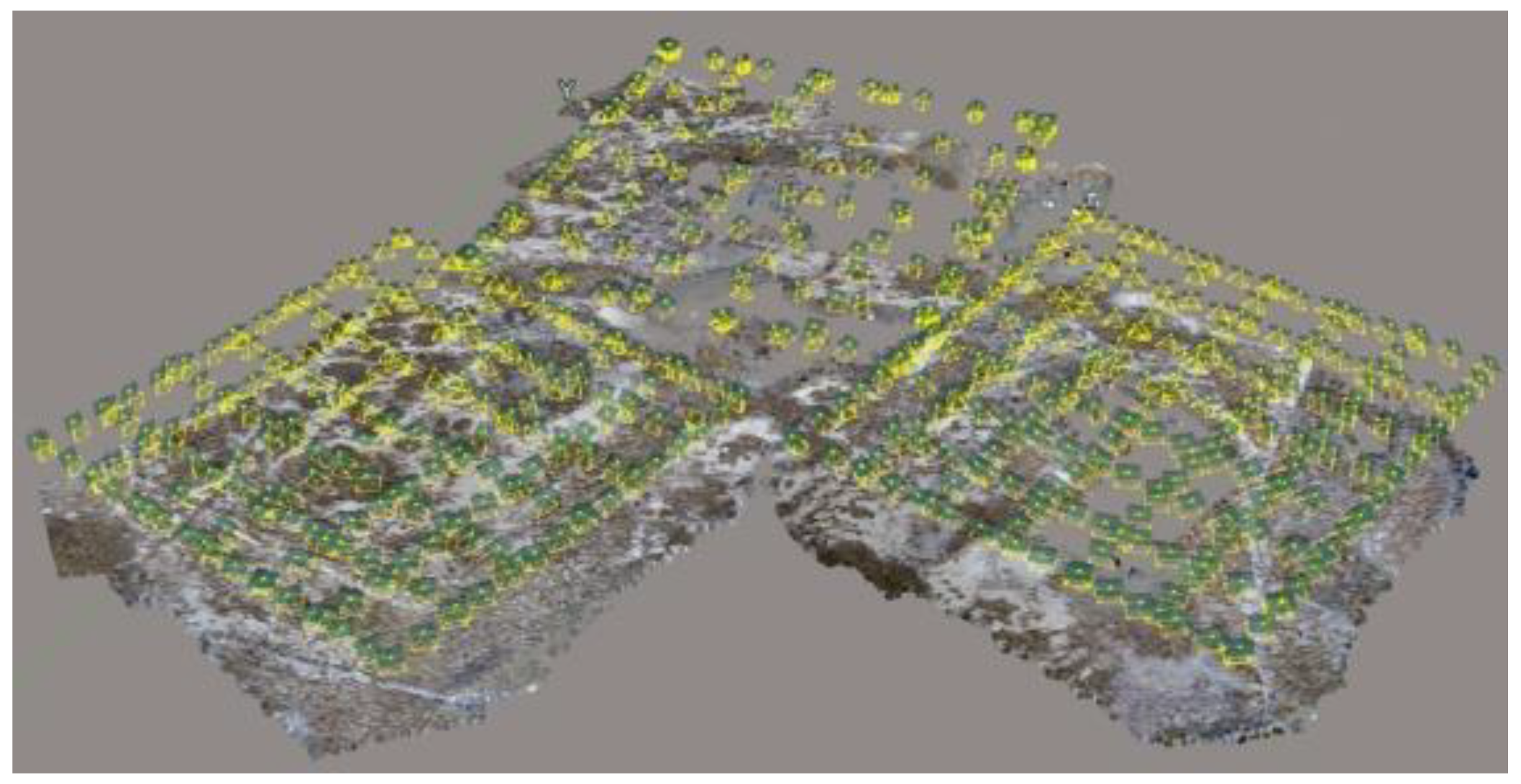
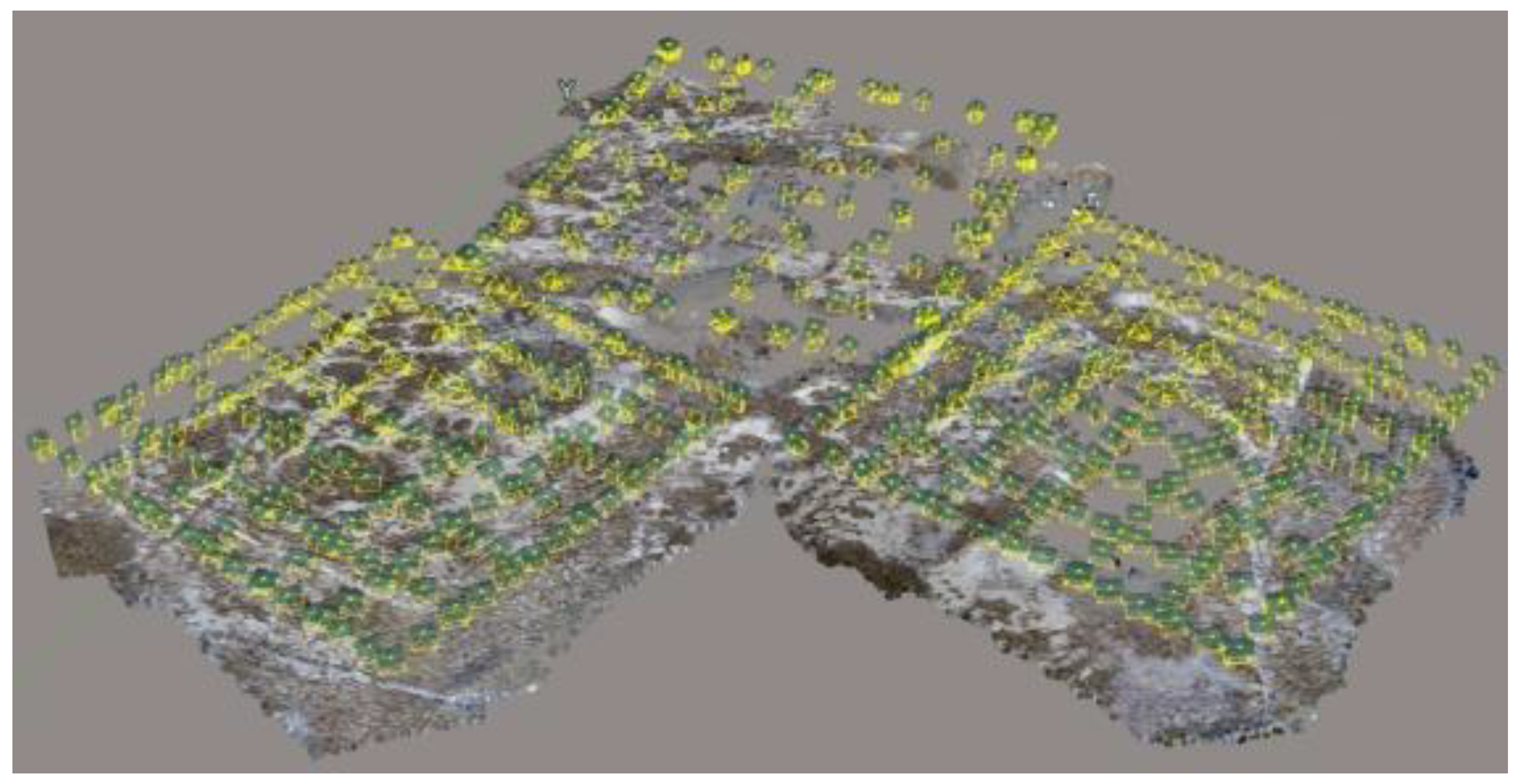
2.4.1. Habitat Map
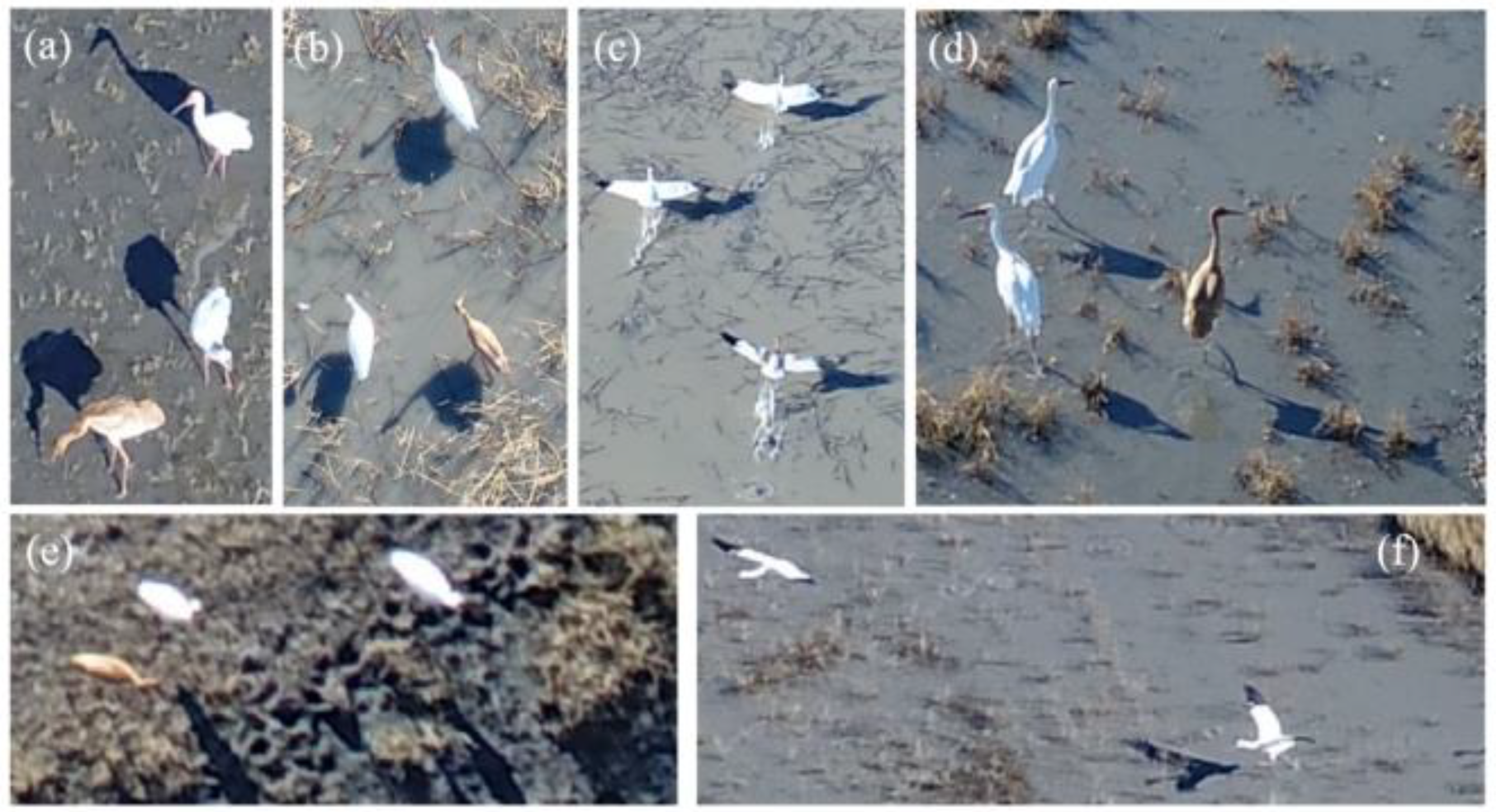
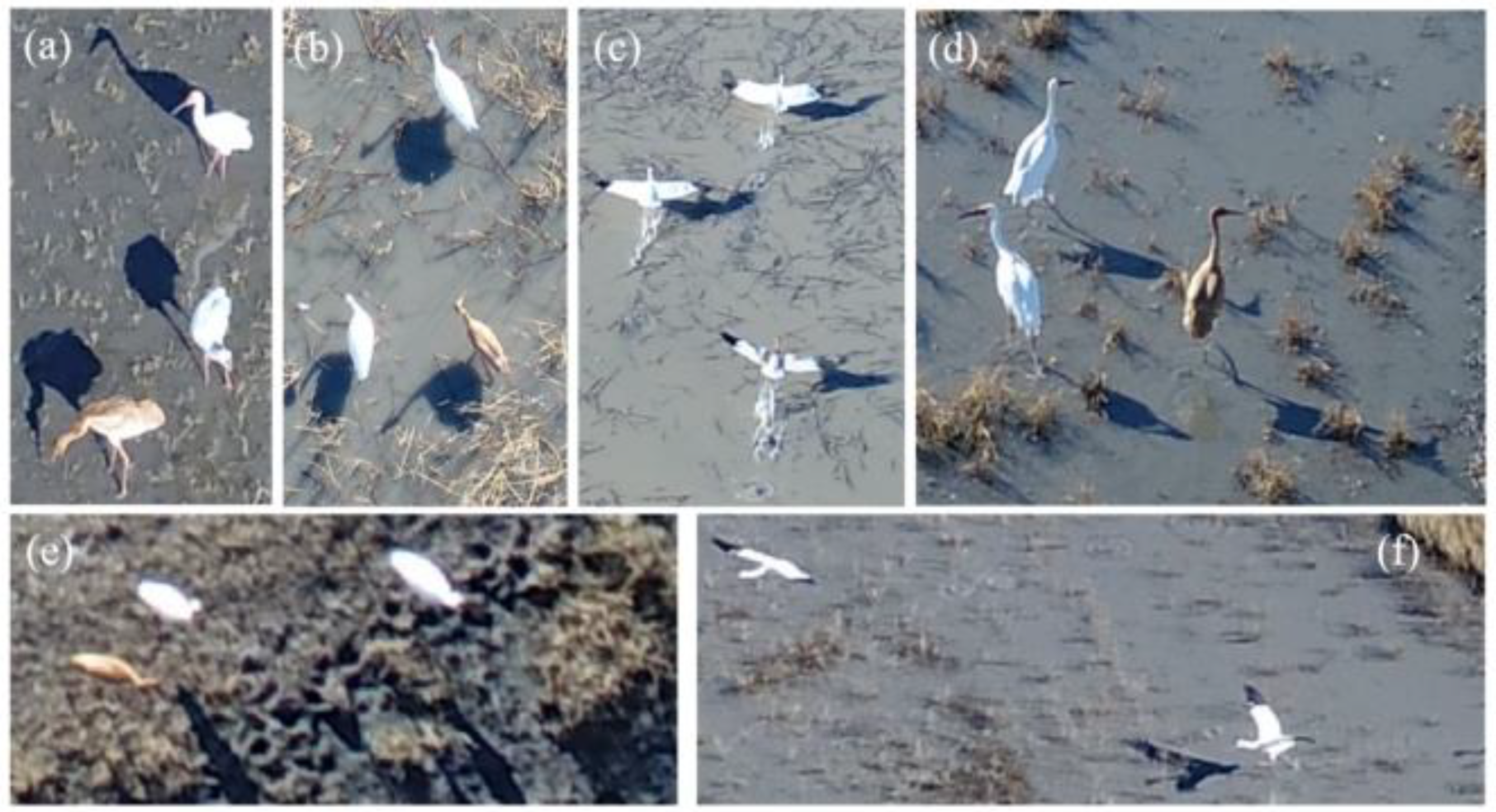
2.4.2. UAV Photographic Characteristics
3. Results
3.1. UAV Habitat Method Survey Results
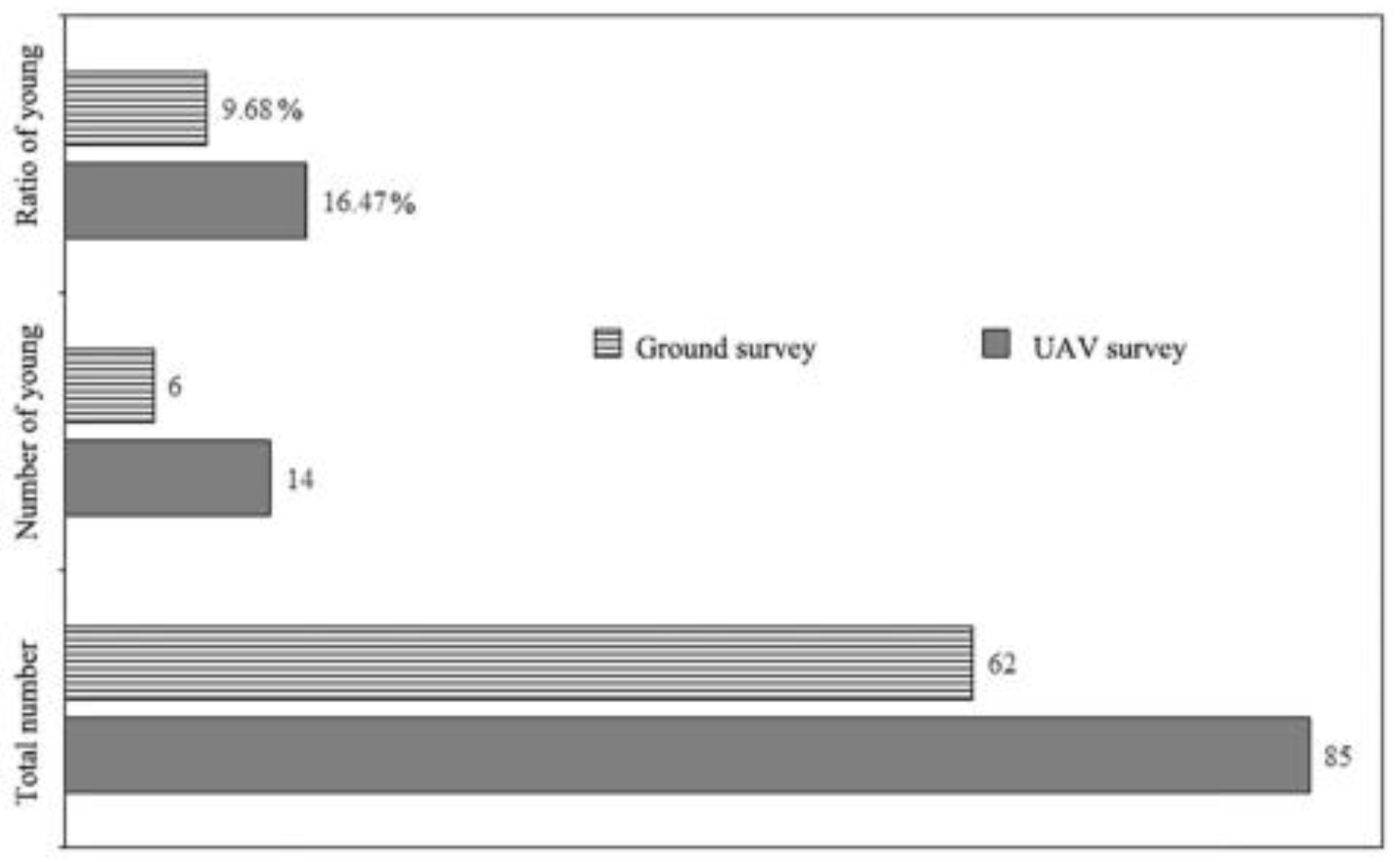
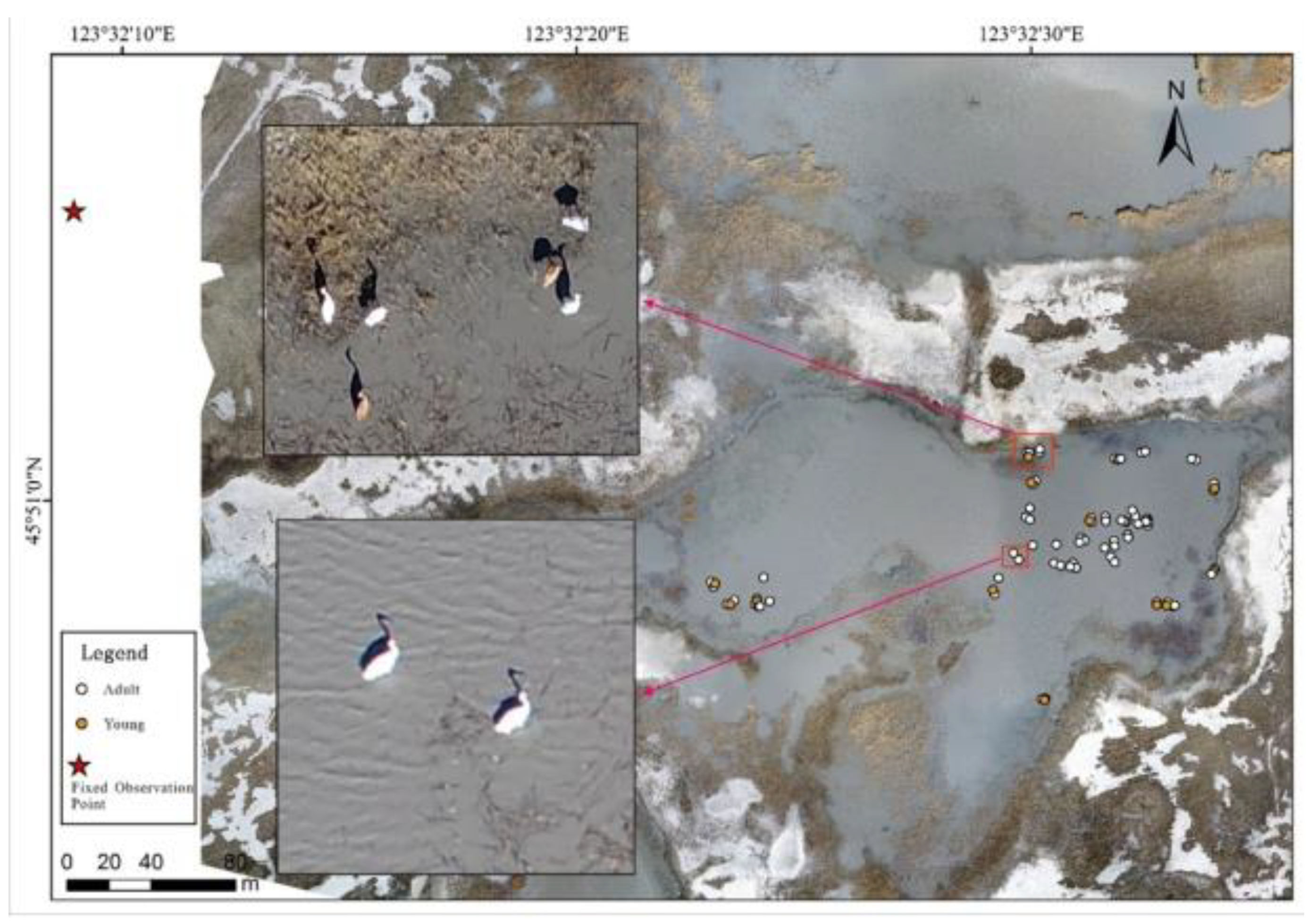
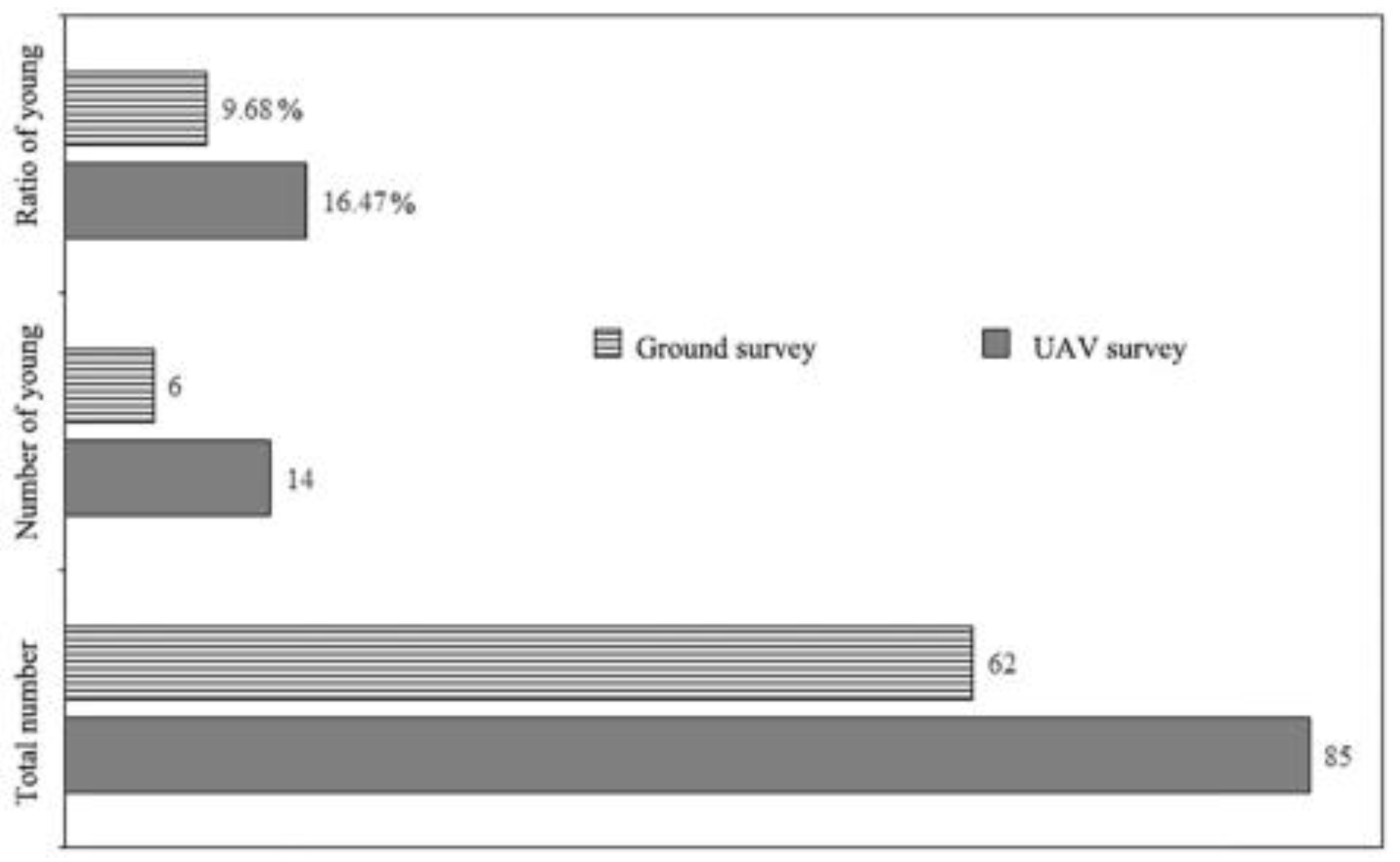
3.2. UAV Distribution Method Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- MacPherson, M.P.; Webb, E.B.; Raedeke, A.; Mengel, D.; Nelson, F. A review of Bayesian belief network models as decision-support tools for wetland conservation: Are water birds potential umbrella taxa? Biol. Conserv. 2018, 226, 215–223. [Google Scholar] [CrossRef] [Green Version]
- Steele, B.B.; Bayn, R.L.; Grant, J.C.V. Environmental monitoring using populations of birds and small mammals: Analyses of sampling effort. Biol. Conserv. 1984, 30, 157–172. [Google Scholar] [CrossRef]
- Dulava, S.; Bean, W.T.; Richmond, O.M.W. Environmental Reviews and Case Studies: Applications of Unmanned Aircraft Systems (UAS) for Waterbird Surveys. Environ. Pract. 2015, 17, 201–210. [Google Scholar] [CrossRef]
- Jiang, H.B.; He, C.G.; Sheng, L.X.; Tang, Z.H.; Wen, Y.; Yan, T.T.; Zou, C. Hydrological Modelling for Siberian Crane Grus leucogeranus Stopover Sites in Northeast China. PLoS ONE 2015, 10, 13. [Google Scholar] [CrossRef]
- Kong, W.Y.; Zheng, Z.H.; Wu, J.C.; Ning, Y.; Wang, Y.; Han, X.D. Foraging habitat selection of Siberian Crane (Grus leucogeranus) during autumn migration period in the Momoge Nature Reserve. Zool. Res. 2013, 34, 166–173. [Google Scholar] [CrossRef]
- Li, X.M.; Cheng, R.M.; Xiao, W.F.; Pan, K.J.; Qian, F.W. Waterbird Monitoring: History, Status and Future Perspectives in China. Wetl. Sci. 2020, 18, 633–645. [Google Scholar] [CrossRef]
- Bako, G.; Tolnai, M.; Takacs, A. Introduction and Testing of a Monitoring and Colony-Mapping Method for Waterbird Populations That Uses High-Speed and Ultra-Detailed Aerial Remote Sensing. Sensors 2014, 14, 12828–12846. [Google Scholar] [CrossRef] [PubMed]
- Conroy, M.J.; Peterson, J.T.; Bass, O.L.; Fonnesbeck, C.J.; Howell, J.E.; Moore, C.T.; Runge, J.P. Sources of Variation in Detection of Wading Birds from Aerial Surveys in the Florida Everglades. Auk 2008, 125, 731–743. [Google Scholar] [CrossRef]
- Bridge, E.S.; Thorup, K.; Bowlin, M.S.; Chilson, P.B.; Diehl, R.H.; Fléron, R.W.; Hartl, P.; Kays, R.; Kelly, J.F.; Robinson, W.D.; et al. Technology on the Move: Recent and Forthcoming Innovations for Tracking Migratory Birds. Bioscience 2011, 61, 689–698. [Google Scholar] [CrossRef] [Green Version]
- Christie, K.S.; Gilbert, S.L.; Brown, C.L.; Hatfield, M.; Hanson, L. Unmanned aircraft systems in wildlife research: Current and future applications of a transformative technology. Front. Ecol. Environ. 2016, 14, 242–252. [Google Scholar] [CrossRef]
- Gonzalez, L.F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation. Sensors 2016, 16, 97. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fortuna, J.; Ferreira, F.; Gomes, R.; Ferreira, S.; Sousa, J. Using low cost open source UAVs for marine wild life monitoring-Field Report. IFAC Proc. Vol. 2013, 46, 291–295. [Google Scholar] [CrossRef]
- Chabot, D.; Bird, D.M. Wildlife research and management methods in the 21st century: Where do unmanned aircraft fit in? J. Unmanned Veh. Syst. 2015, 3, 137–155. [Google Scholar] [CrossRef] [Green Version]
- Rey, N.; Volpi, M.; Joost, S.; Tuia, D. Detecting animals in African Savanna with UAVs and the crowds. Remote Sens. Environ. 2017, 200, 341–351. [Google Scholar] [CrossRef] [Green Version]
- Weissensteiner, M.H.; Poelstra, J.W.; Wolf, J.B.W. Low-budget ready-to-fly unmanned aerial vehicles: An effective tool for evaluating the nesting status of canopy-breeding bird species. J. Avian Biol. 2015, 46, 425–430. [Google Scholar] [CrossRef]
- Sardà-Palomera, F.; Bota, G.; Viñolo, C.; Pallarés, O.; Sazatornil, V.; Brotons, L.; Gomáriz, S.; Sardà, F. Fine-scale bird monitoring from light unmanned aircraft systems. Ibis 2012, 154, 177–183. [Google Scholar] [CrossRef]
- Scholten, C.N.; Kamphuis, A.J.; Vredevoogd, K.J.; Lee-Strydhorst, K.G.; Atma, J.L.; Shea, C.B.; Lamberg, O.N.; Proppe, D.S. Real-time thermal imagery from an unmanned aerial vehicle can locate ground nests of a grassland songbird at rates similar to traditional methods. Biol. Conserv. 2019, 233, 241–246. [Google Scholar] [CrossRef]
- Drever, M.C.; Chabot, D.; O’Hara, P.D.; Thomas, J.D.; Breault, A.; Millikin, R.L. Evaluation of an unmanned rotorcraft to monitor wintering waterbirds and coastal habitats in British Columbia, Canada. J. Unmanned Veh. Syst. 2015, 3, 256–267. [Google Scholar] [CrossRef]
- Chabot, D.; Craik, S.R.; Bird, D.M. Population census of a large common tern colony with a small unmanned aircraft. PLoS ONE 2015, 10, e0122588. [Google Scholar] [CrossRef] [Green Version]
- Jiang, H.; Wen, Y.; Zou, L.; Wang, Z.; He, C.; Zou, C. The effects of a wetland restoration project on the Siberian crane (Grus leucogeranus) population and stopover habitat in Momoge National Nature Reserve, China. Ecol. Eng. 2016, 96, 170–177. [Google Scholar] [CrossRef]
- Kanai, Y.; Ueta, M.; Germogenov, N.; Nagendran, M.; Mita, N.; Higuchi, H. Migration routes and important resting areas of Siberian cranes (Grus leucogeranus) between northeastern Siberia and China as revealed by satellite tracking. Biol. Conserv. 2002, 106, 339–346. [Google Scholar] [CrossRef]
- Qi, Z.; Yang, N.; Mei, J.W.; Hua, L.G. Current Status and Conservation of The Siberian Crane. Wetl. Sci. Manag. 2019, 15, 43–45. [Google Scholar] [CrossRef]
- Li, J.; Liu, Q. Prerequisites of Waterfowl Monitoring Using Unmanned Aerial Vehicle. Trop. Geogr. 2019, 39, 546–552. [Google Scholar] [CrossRef]
- Dundas, S.J.; Vardanega, M.; O’Brien, P.; McLeod, S.R. Quantifying Waterfowl Numbers: Comparison of Drone and Ground-Based Survey Methods for Surveying Waterfowl on Artificial Waterbodies. Drones 2021, 5, 5. [Google Scholar] [CrossRef]
- McEvoy, J.F.; Hall, G.P.; McDonald, P.G. Evaluation of unmanned aerial vehicle shape, flight path and camera type for waterfowl surveys: Disturbance effects and species recognition. PeerJ 2016, 4, e1831. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.J.; Fang, W.W.; Li, X.M. Behavior of Siberian Crane During Spring in Momoge Nature Reserve, Jilin Province, China. Chin. J. Wildl. 2012, 33, 67–70. [Google Scholar] [CrossRef]
- Cui, M.H.; Zheng, L.Q. Observation of Behavior of Grus leucogeranus’ Migration in Fall. For. Inventory Plan. 2006, 4, 94–97. [Google Scholar] [CrossRef]
- Kingsford, R.T.; Porter, J.L. Monitoring waterbird populations with aerial surveys what have we learnt? Wildl. Res. 2009, 36, 29–40. [Google Scholar] [CrossRef]
- Lyons, M.; Brandis, K.; Callaghan, C.; McCann, J.; Mills, C.; Ryall, S.; Kingsford, R. Bird interactions with drones, from individuals to large colonies. Aust. Field Ornithol. 2018, 35, 51–56. [Google Scholar] [CrossRef] [Green Version]
- Descamps, S.; Béchet, A.; Descombes, X.; Arnaud, A.; Zerubia, J. An automatic counter for aerial images of aggregations of large birds. Bird Study 2011, 58, 302–308. [Google Scholar] [CrossRef]
- Grenzdörffer, G.J. UAS-based automatic bird count of a common gull colony. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 1, 169–174. [Google Scholar] [CrossRef] [Green Version]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Xu, J.; Qian, F. Migration Routes of Siberian Crane (Grus leucogeranus) in Spring and Autumn by Satellite Tracking. Wetl. Sci. 2016, 14, 347–353. [Google Scholar]
- Wen, D.; Hu, Y.; Xiong, Z.; Chang, Y.; Li, Y.; Wang, Y.; Liu, M.; Zhu, J. Potential Suitable Habitat Distribution and Conservation Strategy for the Siberian Crane (Grus leucogeranus) at Spring Stopover Sites in Northeasternern China. Pol. J. Environ. Stud. 2020, 29. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area Number | UAV Survey | Ground Survey | ||
|---|---|---|---|---|
| Crane Detection | Number | Crane Detection | Number | |
| 1 | Yes | 3 | Yes | 2 |
| 2 | Yes | 3 | Yes | 1 |
| 3 | No | No | ||
| 4 | No | No | ||
| 5 | Yes | 3 | No | |
| 6 | No | No | ||
| 7 | No | No | ||
| 8 | Yes | 9 | No | |
| 9 | Yes | 276 | No | |
| 10 | No | No | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, D.; Su, L.; Hu, Y.; Xiong, Z.; Liu, M.; Long, Y. Surveys of Large Waterfowl and Their Habitats Using an Unmanned Aerial Vehicle: A Case Study on the Siberian Crane. Drones 2021, 5, 102. https://doi.org/10.3390/drones5040102
Wen D, Su L, Hu Y, Xiong Z, Liu M, Long Y. Surveys of Large Waterfowl and Their Habitats Using an Unmanned Aerial Vehicle: A Case Study on the Siberian Crane. Drones. 2021; 5(4):102. https://doi.org/10.3390/drones5040102
Chicago/Turabian StyleWen, Ding, Lei Su, Yuanman Hu, Zaiping Xiong, Miao Liu, and Yingxian Long. 2021. "Surveys of Large Waterfowl and Their Habitats Using an Unmanned Aerial Vehicle: A Case Study on the Siberian Crane" Drones 5, no. 4: 102. https://doi.org/10.3390/drones5040102
APA StyleWen, D., Su, L., Hu, Y., Xiong, Z., Liu, M., & Long, Y. (2021). Surveys of Large Waterfowl and Their Habitats Using an Unmanned Aerial Vehicle: A Case Study on the Siberian Crane. Drones, 5(4), 102. https://doi.org/10.3390/drones5040102