1. Introduction
Unmanned ground vehicles (UGVs) are often used in the field of unmanned operation, especially in repetitive and single-factory environments [
1,
2]. Unmanned ground vehicles have also been gradually applied to the indoor environment. In particular, the tracking security unmanned vehicles in indoor public places are widely used [
3]. In recent years, the application of unmanned tracking vehicles in building wall monitoring has also been proposed [
4]. As shown in
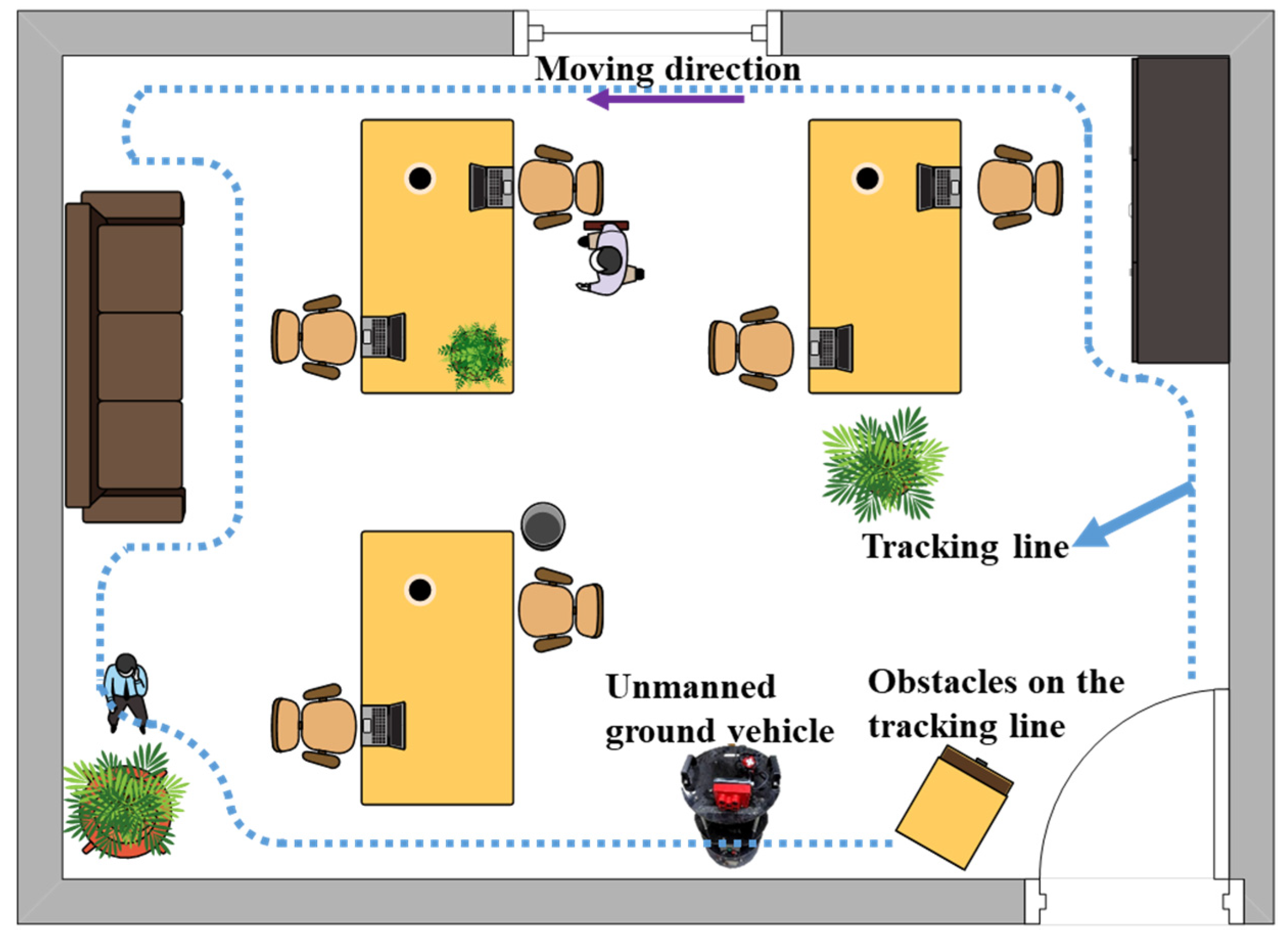
Figure 1, the unmanned vehicle regularly inspects the building wall through the sensor according to the specified track and uses the sensor information to evaluate the building safety. However, in the complex indoor environment, unmanned vehicles often encounter obstacles not indicated in the built-in map during operation. How to sense obstacles in time and avoid obstacles is a hot issue in the research of indoor tracking unmanned vehicles. Indoor obstacle avoidance research focuses on perception and control decision-making. Firstly, the local environment is obtained by the sensor and the obstacles are identified, then the obstacle avoidance decision is given by the decision system, and finally, the unmanned vehicle is controlled to complete the obstacle avoidance process.
In the research of the obstacle perception of ground unmanned vehicles, vision sensors, lidar sensors, and millimeter wave radar sensors are usually used to obtain obstacle information. Rajashekaraiah et al. (2017) [
5] used a laser rangefinder to obtain obstacle data and constructed a PTEM (probabilistic thread exposure map), which obtained obstacle information through lidar and updated PTEM in real time to guide unmanned vehicles to avoid obstacles. Similarly, using the radar sensor, Yang et al. (2017) [
6] proposed the sensor lidar to detect the obstacles in the front path. Based on the lidar data, combined with the vehicle position, obstacle position, vehicle operation capability, and global environmental restrictions, the optimized path was generated, and the path was updated in real time through the detection data. Bhave et al. (2019) [
7] applied the laser rangefinder to an unmanned ground vehicle (‘the rover’). The test showed that the unmanned vehicle can detect obstacles in front and navigate back to the base. This unmanned vehicle has been applied to aid intelligence, surveillance, and rehabilitation missions in adult environments. Khan et al. (2017) [
8] proposed a disparity image method based on the vision method. This method inferred the relationship between obstacles and robot path through vision and judged the contour and position of obstacles based on projection information. The author’s experiments showed that under the action of visual perception, the robot could detect obstacles of any size and shape within 80–200 cm. Levkovits-Scherer et al. (2019) [
9] used the visual perception method for obstacle avoidance tasks, but the application object was UAV. The front environment information of UAV was obtained through monocular vision, and the image was transmitted to the ground control station. The ground control station had a built-in convolution neural network algorithm to extract obstacle information, and then transmitted the flight control command to the UAV to realize real-time obstacle avoidance. Similarly, using visual perception to avoid obstacles, Yu et al. (2020) [
10] proposed an autonomous obstacle avoidance scheme based on the fusion of millimeter wave radar and monocular camera, and through extended Kalman filter (EKF) data fusion to build exact and real 3D coordinates of the obstacles. Eppenberger et al. (2020) [
11] also used noise point cloud data generated by stereo cameras to divide obstacles into static and dynamic. The moving speed of dynamic obstacles was estimated and a two-dimensional moving grid for obstacle avoidance was generated. The author evaluated them in indoor and outdoor environments, respectively. Finally, the accuracy of dynamic obstacles was 85.3% and that of static obstacles was 96.9%.
In the research of obstacle decision-making and control of unmanned ground vehicles, many path optimization algorithms and intelligent control methods have been adopted. Lv et al. (2021) [
12] proposed a fuzzy neural network objective avoidance algorithm based on multi-sensor information fusion and verified the superiority and reliability of the algorithm through simulation and real platform experiments. Hu et al. (2020) [
13] divided obstacles into dynamic and static. For static obstacles, the optimal path was generated online by an optimal path reconfiguration based on direct collocation method. For dynamic obstacles, receding horizon control was used for real-time path optimization. The continuous time model predictive control algorithm and the disturbance estimation based on extended state observer were designed. Finally, the simulation experiment was carried out on CarSim platform. Mohamed et al. (2018) [
14] proposed an artificial potential field (APF) method combined with optimal control theory for path planning. This method generated a collision-free path when obstacles existed. Based on the artificial potential field method, Chen et al. (2021) [
15] proposed an improved artificial potential field for obstacle avoidance of unmanned vehicles in urban environment and solved the problem of autonomous obstacle avoidance in complex urban environment by establishing the models of gravitational potential field, repetitive potential field, and comprehensive potential field. Singla et al. (2019) [
16] proposed a UAV obstacle avoidance method based on reinforcement learning. By using recurrent neural networks with temporary attention, UAVs could avoid obstacles in real time when only equipped with a monocular camera.
In this paper, based on the above research on the perception and decision control of unmanned ground vehicles, an end-to-end obstacle avoidance method for unmanned ground vehicles is proposed. The front data of unmanned vehicle are obtained by the monocular vision method, and it is well-applied in the field of intelligent perception based on deep learning [
17,
18,
19] to realize the perception and discrimination of obstacle orientation. The obstacle avoidance strategy is designed based on the output confidence of the neural network to realize the autonomous obstacle avoidance of ground unmanned vehicles in indoor environments. At the same time, aiming at the training of a transfer neural network, this paper innovatively puts forward the bionic optimization method, which realizes the automatic adjustment of neural network learning rate by combining the bionic optimization strategy with transfer training. The main contributions of this work are:
(1) A bat optimization algorithm with an improved time factor is proposed. It improves the search ability of the algorithm in the early iteration stage and the mining ability in the late iteration stage.
(2) The improved bat algorithm is used to optimize the learning rate parameters of the transfer layer. The output of neural network with higher accuracy under the condition of small samples is realized.
The rest of the paper is organized as follow.
Section 2 introduces the automatic acquisition of training samples. In
Section 3, the improved bat algorithm is used to optimize the neural network. In
Section 4, the neural network training and experiments in different scenes are carried out.
Section 5 concludes the paper.
3. Bionic Optimization Neural Network
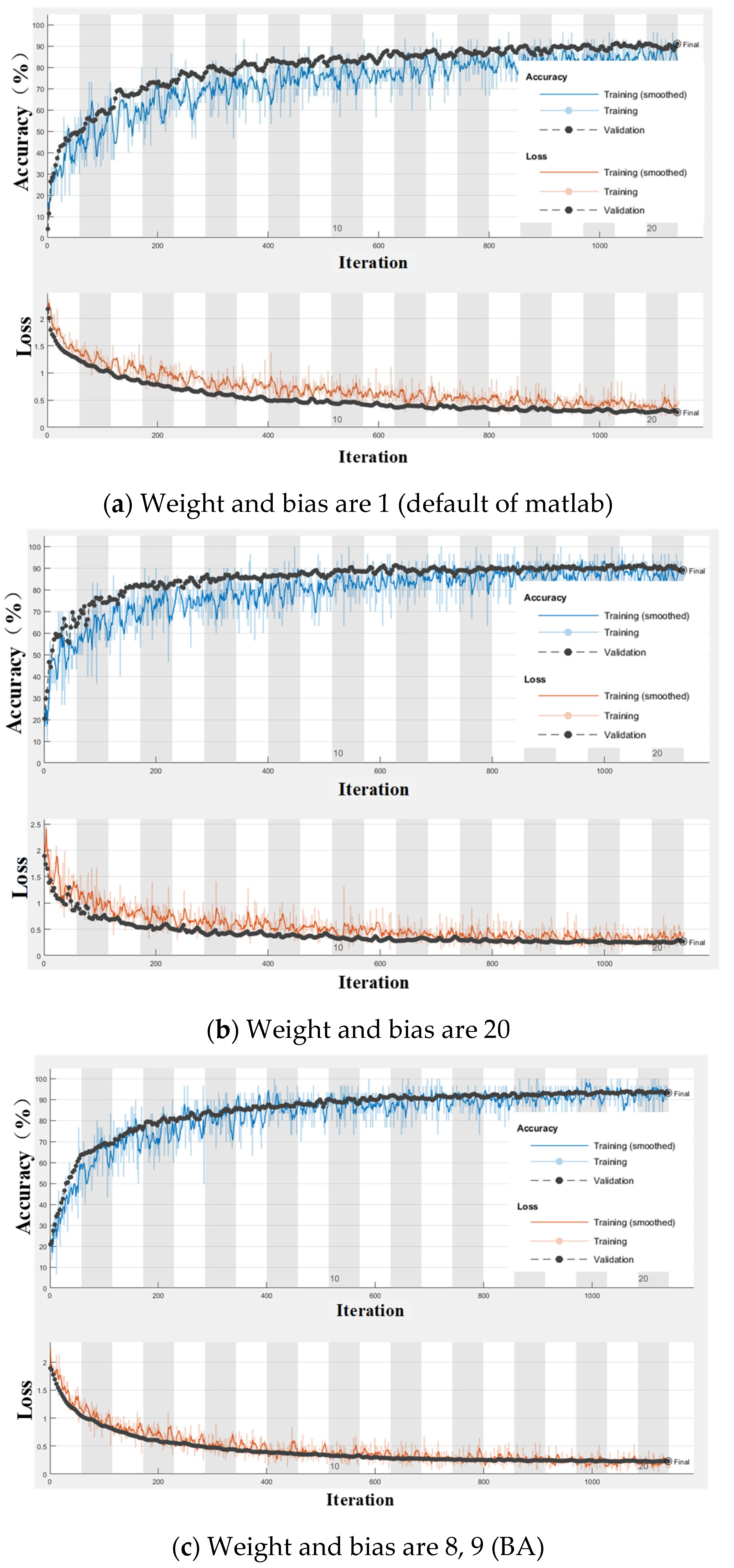
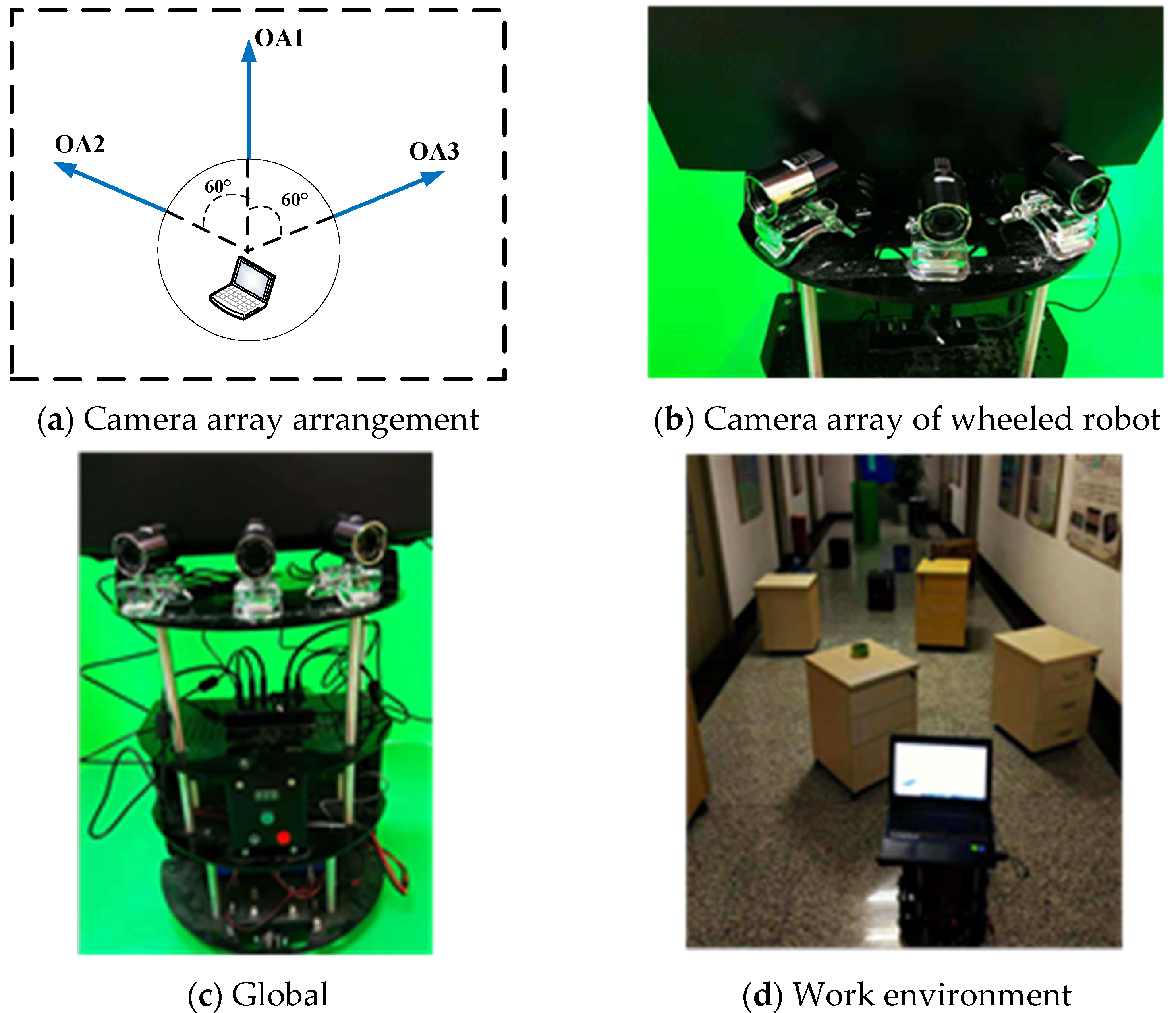
This paper uses Alexnet-based transfer learning to modify the Alexnet network to accommodate new classification tasks. Alexnet was proposed by Alex in 2012. The Alexnet used in this paper has received training for a total of 1 million images in 1000 categories, including keyboards, pencils, and many animals. Through the training of massive pictures, the first few layers of Alexnet can extract rich features in pictures. When using the first layers and adding new layers of Alexnet to adapt to the output of wheeled robot control direction, it is necessary to fine-tune the transfer-layer and quickly adjust the new layer in the process of training the neural network. Therefore, for the learning rate factor setting of the network layer, the new layers need to set a large learning rate factor parameter, and the transfer layers need to set a small learning rate factor parameter. In the process of training the transfer neural network using the Matlab framework, the Matlab defaults to 1 for the new layers’ weight and bias of learning rate factor. This causes the neural network to train slowly, not to converge quickly, or to fall into local optimum. If the manual adjustment parameters set an excessive learning factor, this causes the loss function to oscillate back and forth at the optimal position during the neural network training and may skip the global optimization. The bionic optimization algorithm is used to optimize the weights and bias learning rate factor parameters in the newly added layer of the transfer neural network. The optimization idea is to obtain the optimal learning rate factor parameter combination by training optimization on the small sample training set, and then applying it to the large sample training set to train the neural network.
The bat algorithm (BA) was proposed by X.S. Yang, a Cambridge scholar, in 2010 to simulate the behaviour of bat echolocation in food exploration [
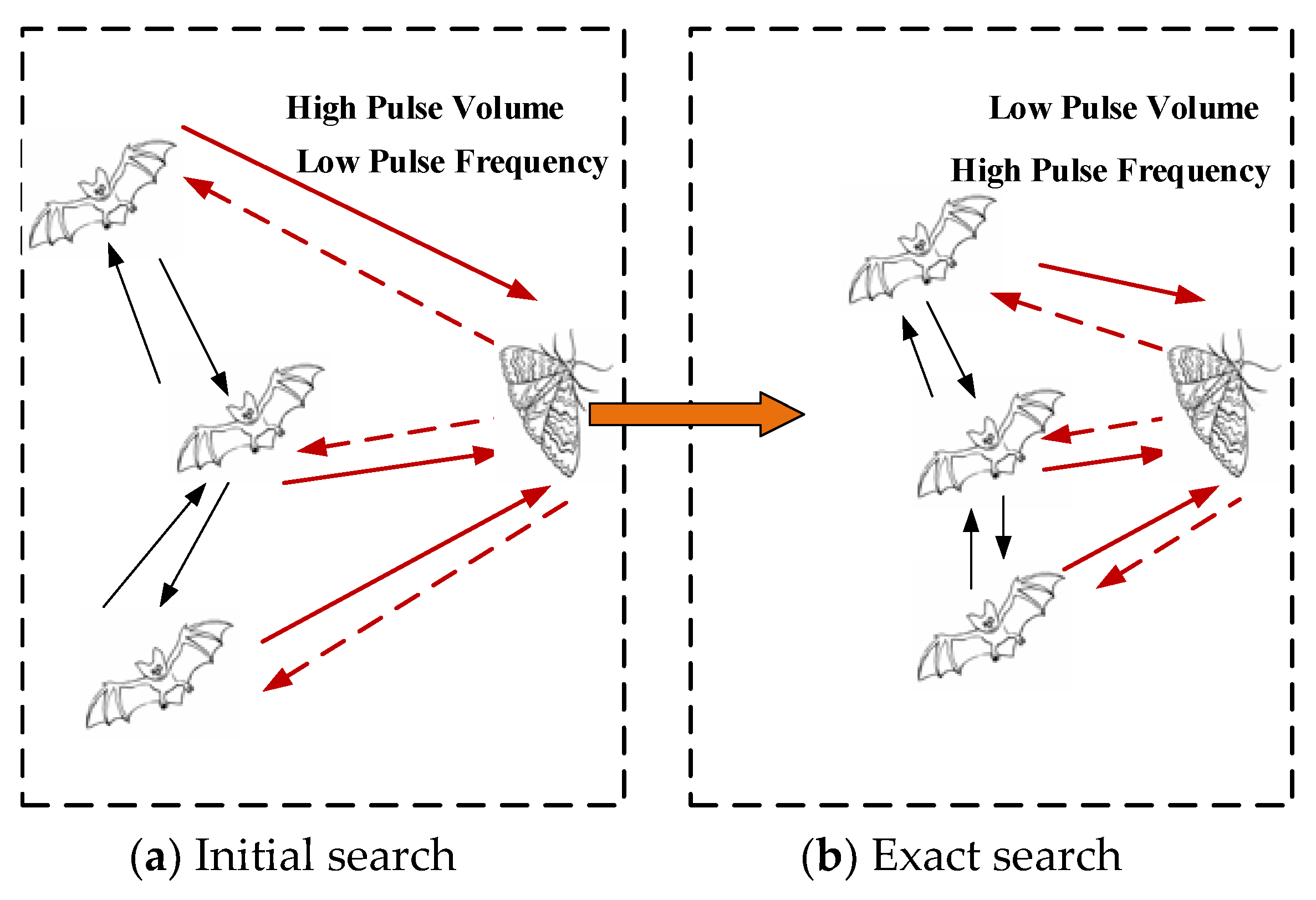
20]. In the process of searching for food, bats first use large pulse sound and low pulse frequency to perform large-scale searches because the strong pulse sound helps to spread ultrasound over a longer distance. When approaching food, low pulse sound and high pulse frequency are used, because high pulse frequency helps to accurately grasp the position of prey. The process of finding food in bats is shown in
Figure 4.
In this paper, a time factor improvement method is proposed for the shortcomings of the initial bat algorithm with a small search range in the early stage and insufficient mining ability in the later stage. By adding time factor perturbation to the position update equation instead of the implied time factor with constant 1, the overall search ability of the algorithm is improved. The time factor disturbance Formula (3) and the improved position update Formula (4) are as follows:
(1) The pulse frequency of a bat individual while exploring a target:
where
is the pulse frequency of the first
individual to explore the target,
and
are the upper and lower limits of the pulse frequency, and
is a random number between 0 and 1.
(2) The velocity of individual bats in searching for targets:
Among them, and are the flight velocities of the first individual at time and time , respectively. is the position of the bat individual at time . is the current optimal position.
(3) The update of the bats’ positions:
where
is the current number of iterations and
is the maximum number of iterations.
(4) The update of the pulse frequency and volume of the bat individual when searching for prey:
where
is the maximum pulse frequency,
is an increase parameter of the pulse frequency and is a constant greater than zero,
is the pulse volume of the individual
at time
, and
is the pulse volume reduction parameter which is a constant from 0 to 1.
Figure 5 shows the iterative process of bat algorithm. The parameters of the newly added full connection layer weights and the bias learning rate factor are, respectively, set by using bat algorithm, and the parameters of the bat algorithm are set as shown in
Table 3.
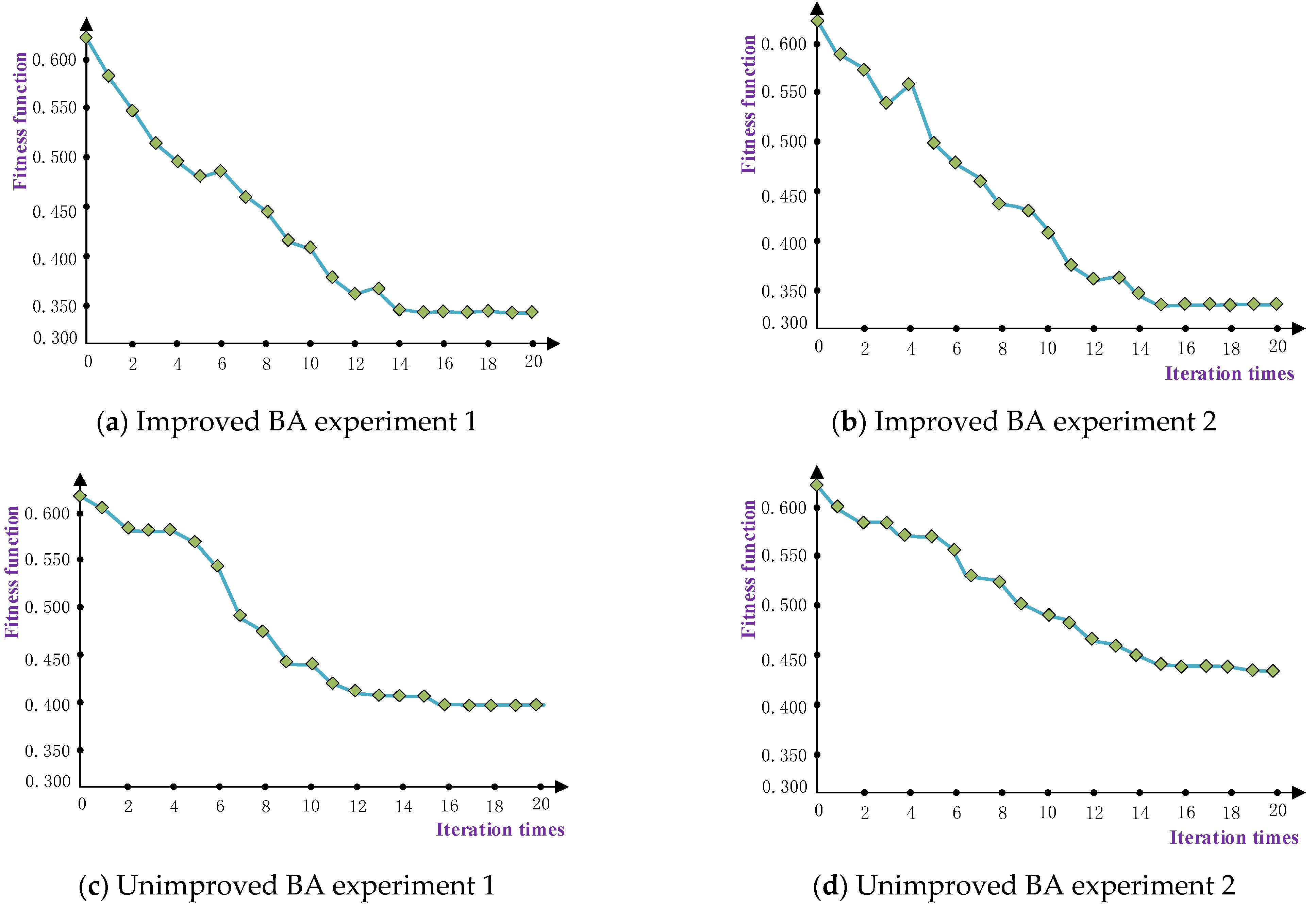
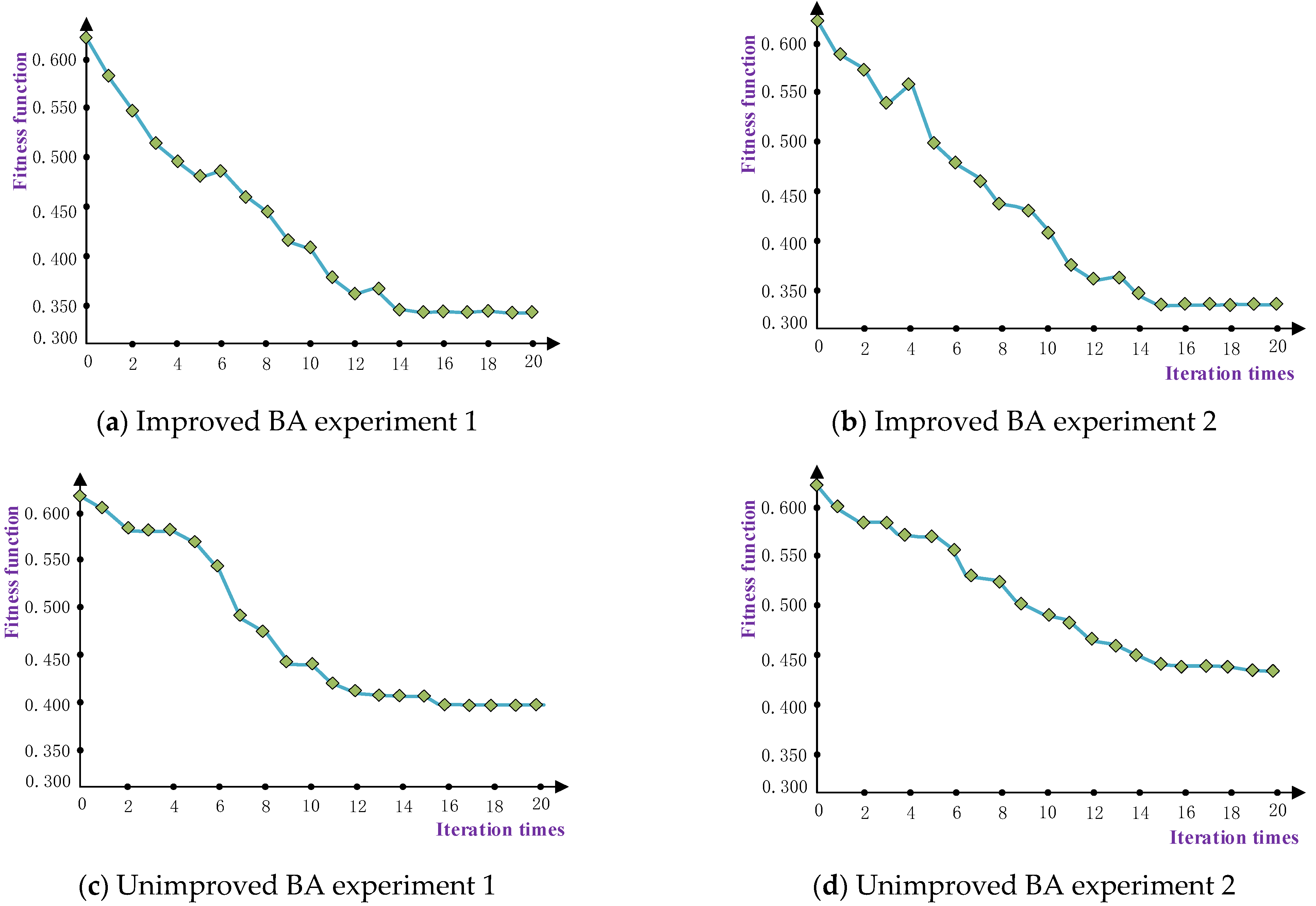
In the experiment, the improved bat algorithm and the unimproved bat algorithm are compared. Each experimental iteration is 20 times, and each algorithm has two groups of experiments. The accuracy of the neural network trained by the learning rate factor obtained by each optimization iteration is used as a fitness function. The idea of optimization in this paper is to optimize on the small sample training set, and then extend the optimized learning rate parameters to the large sample neural network training. Five different samples are used in the training process. A total of 55 training sets and 20 test sets are selected. The training times of the neural network are 10. The process of bionic optimization is shown in
Figure 6. As can be seen from
Figure 6, in the early stage of iteration, the convergence speed of the improved bat algorithm is faster than that of the unimproved bat algorithm, and it is in a fast convergence state. This is mainly because the improved time factor can search the optimal solution in a large range in the early stage of search. In the later stage of iteration, the fitness value of the improved bat algorithm is smaller than that of the unimproved bat algorithm, and it also has advantages in convergence speed. It is further proved that the improved time factor can greatly improve the ability of mining the global optimal value in the later stage of search. Therefore, the improved bat algorithm has more advantages than the unimproved bat algorithm in global optimal solution search.
As can be seen from
Figure 6a,b, the fitness function has converged at about 15 iterations in two experiments, and the solution is globally optimal.
Table 4 is the best opinion from the two experiments. In order to improve the training efficiency, the learning rate parameters take the rounded integers of the average of two experiments.
5. Conclusions
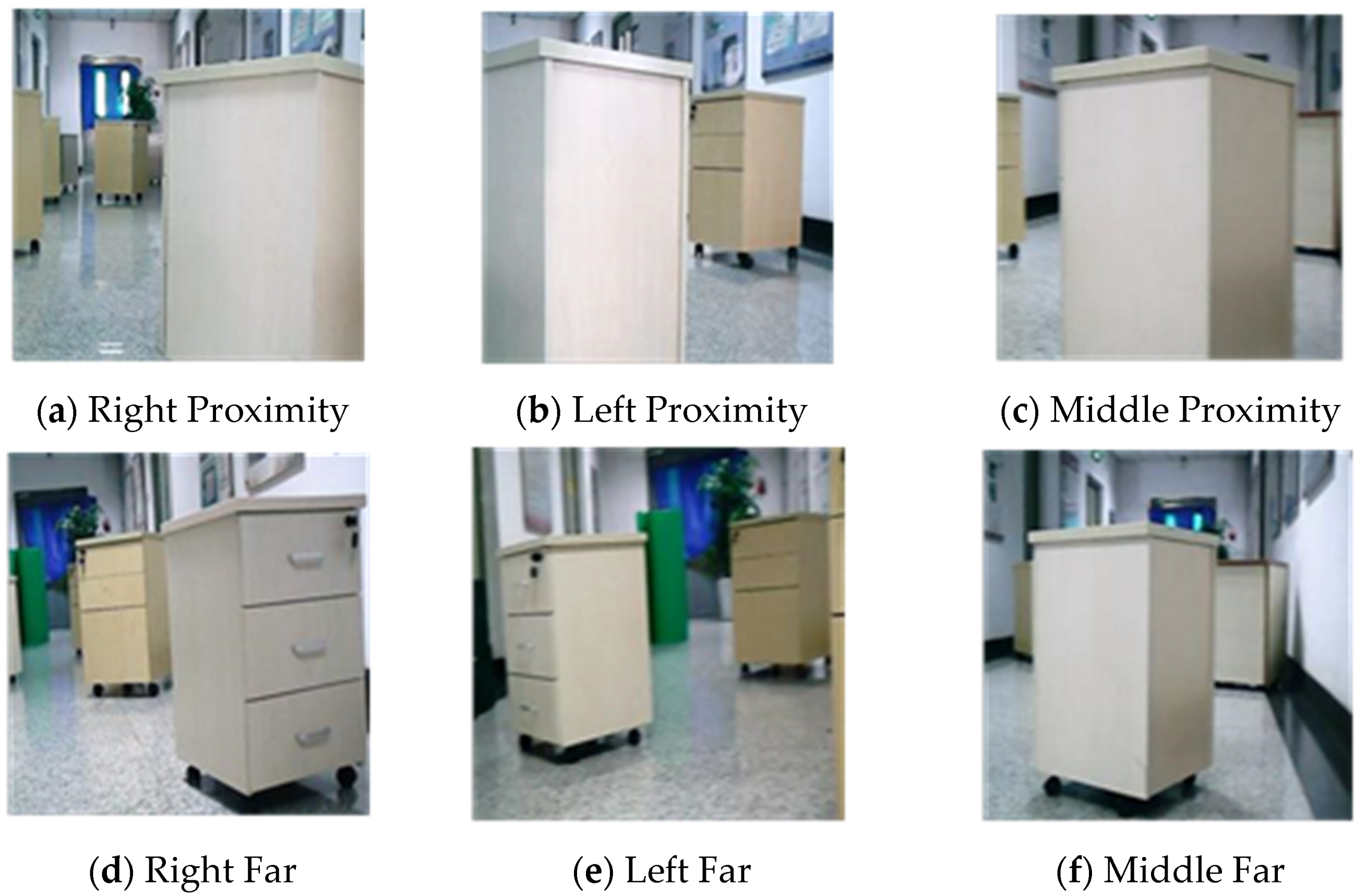
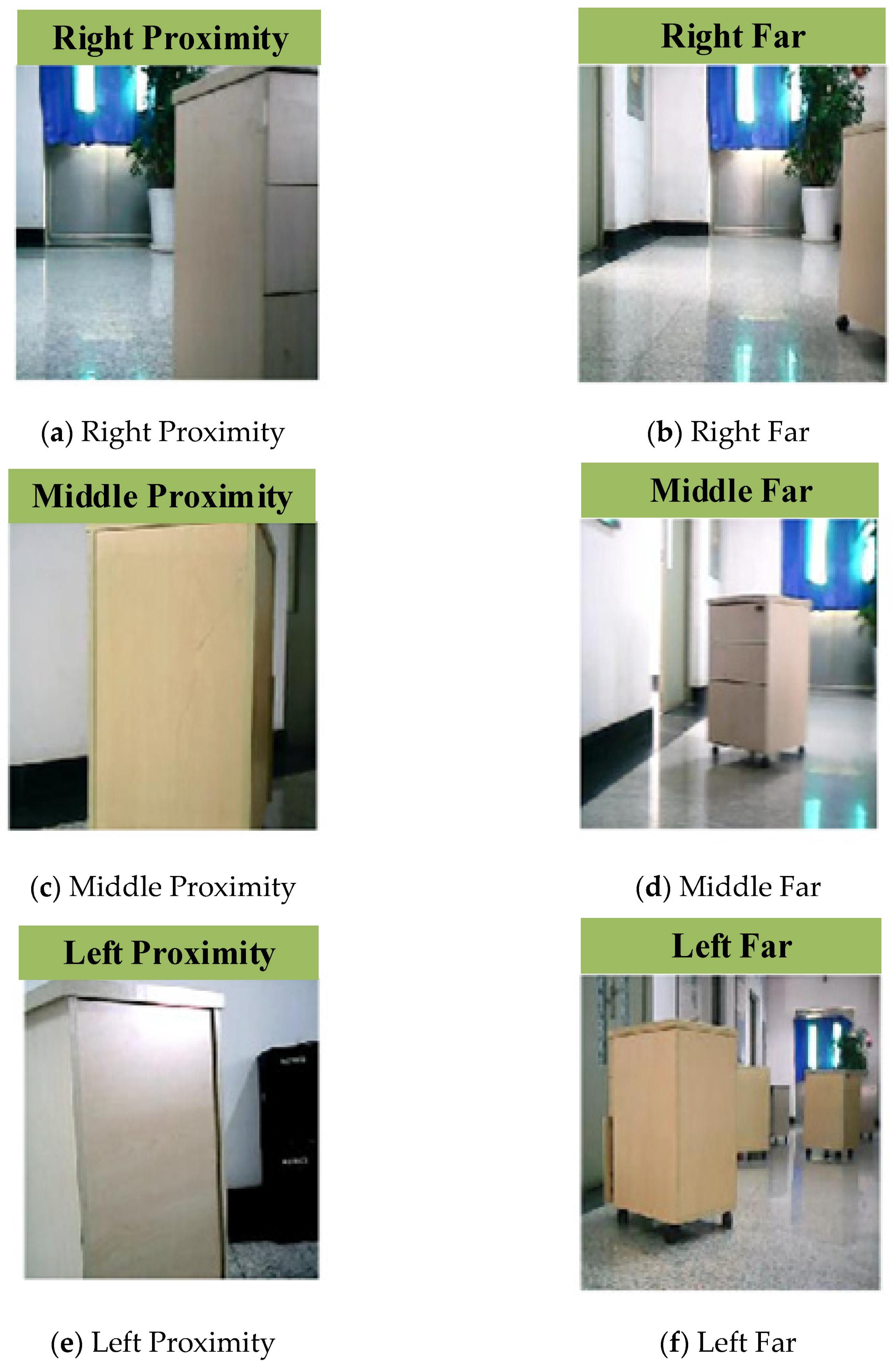
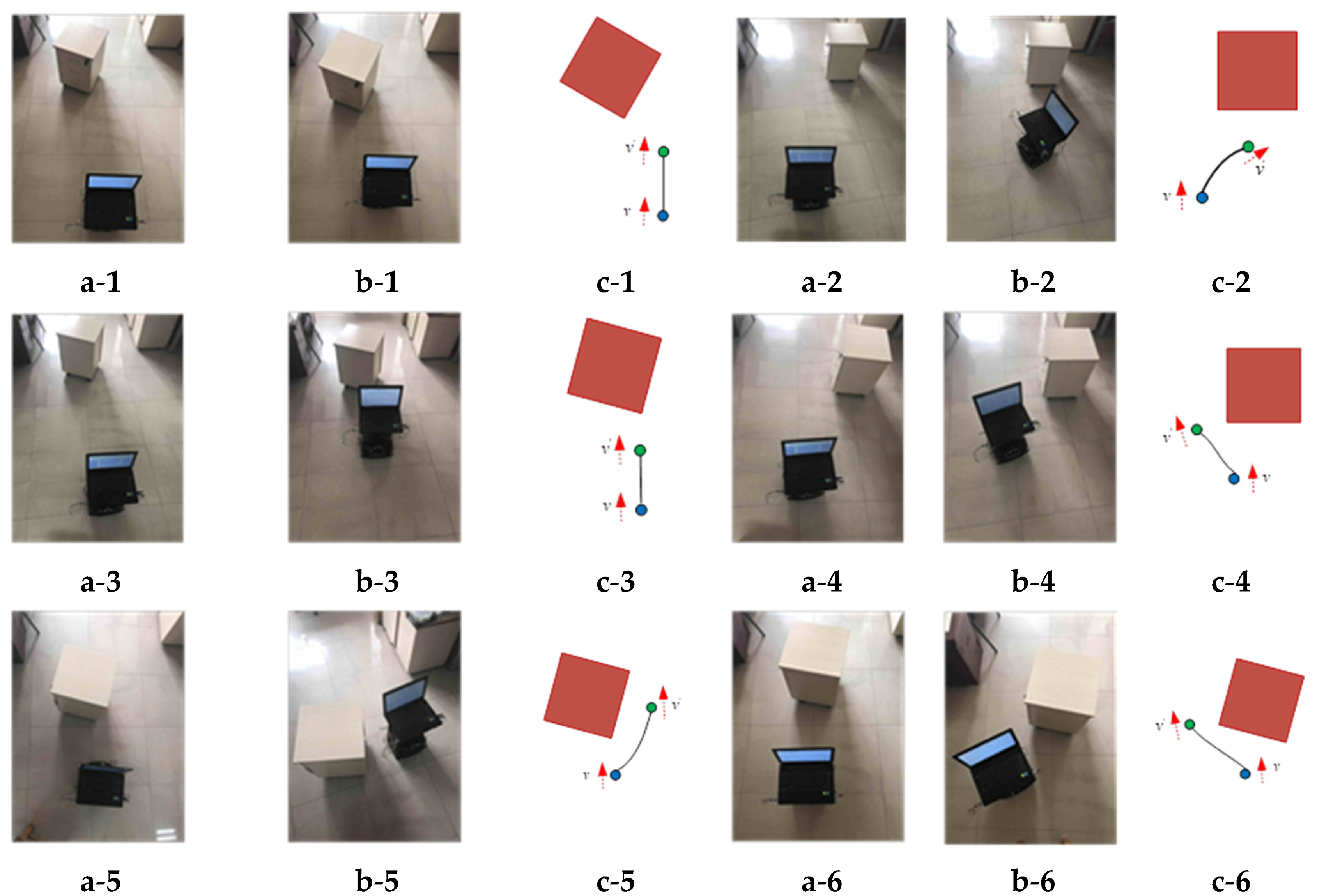
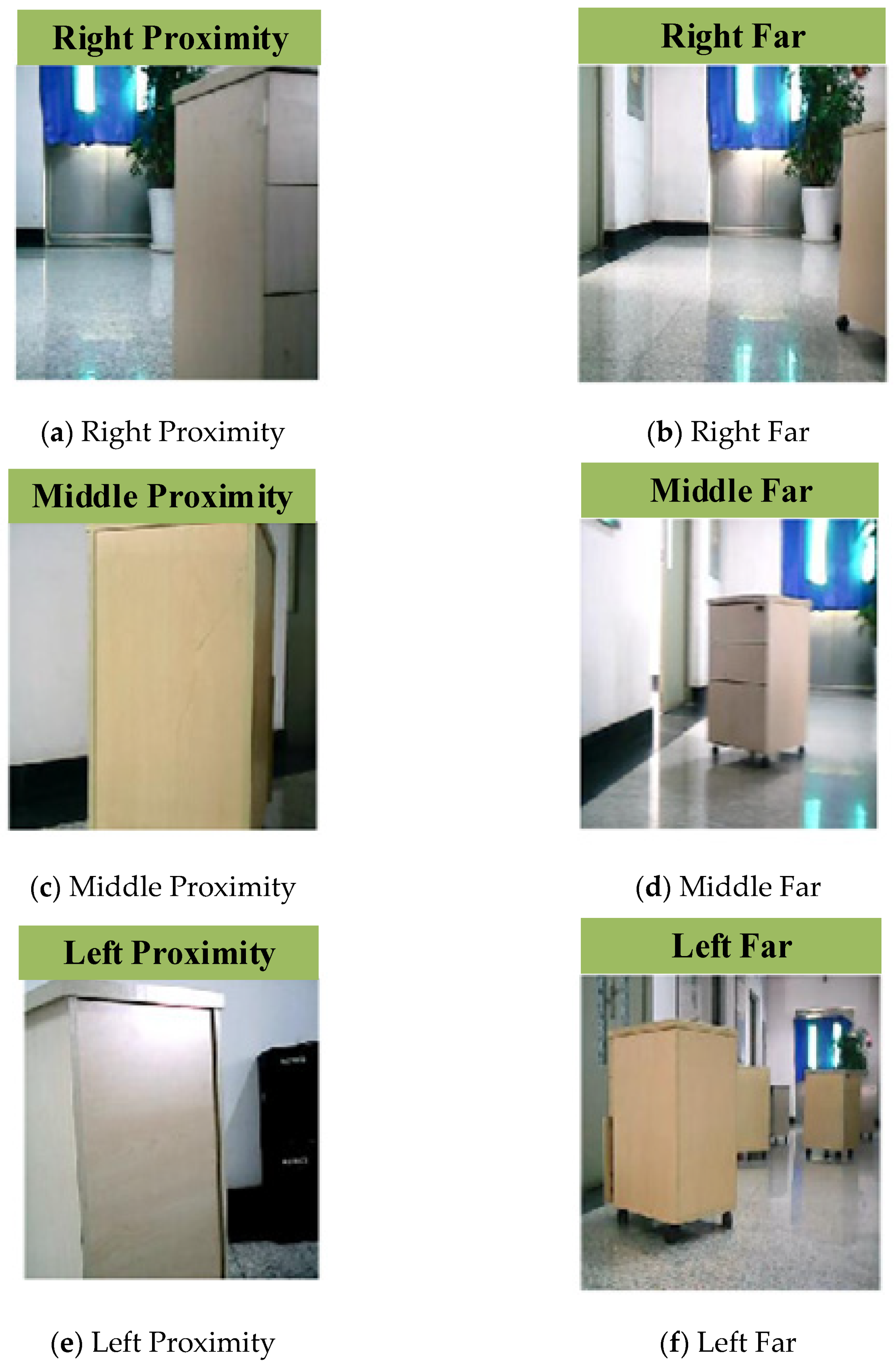
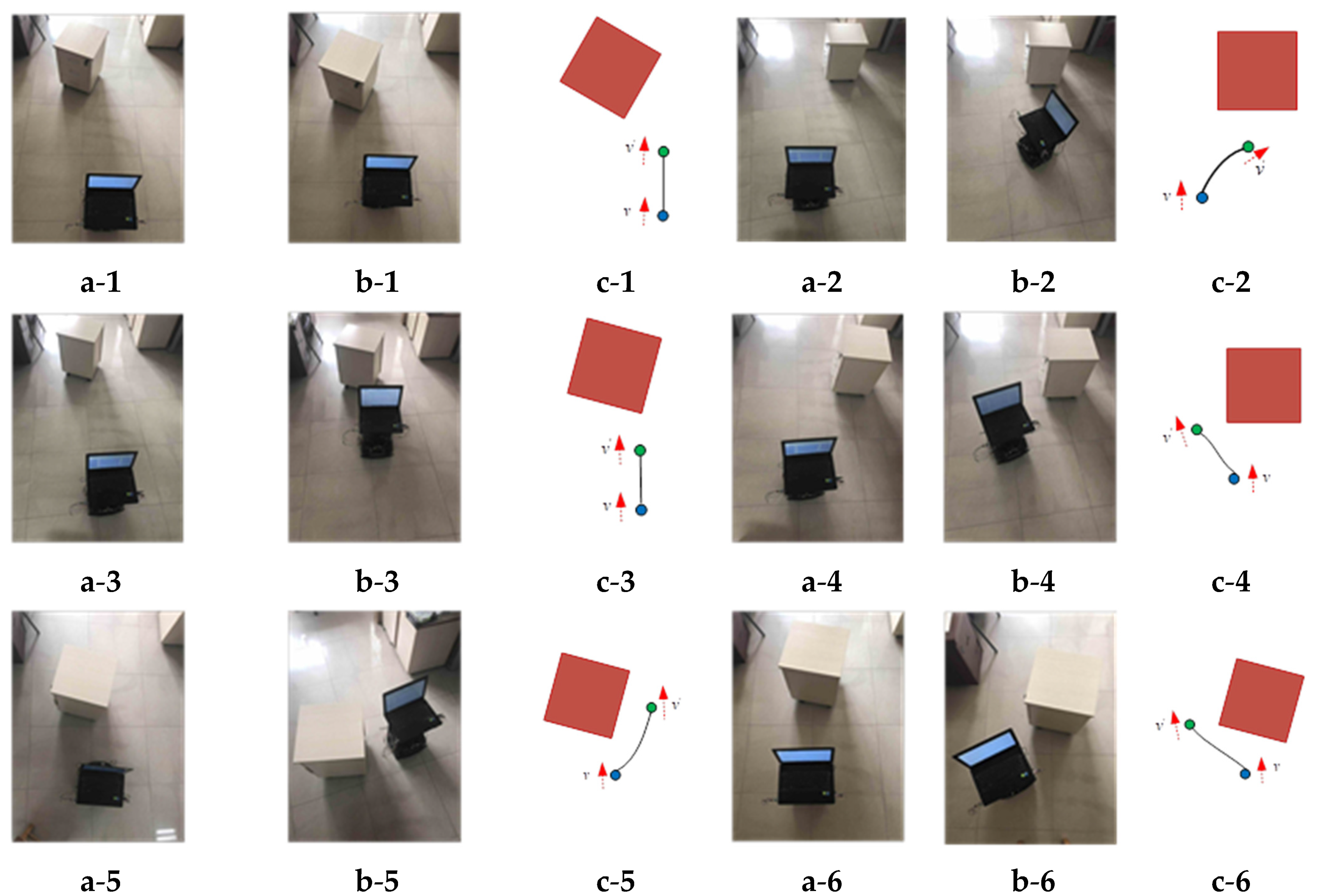
This paper proposes an optimized transfer-CNN method based on improved bat algorithm. The image of the front of the wheeled robot is input into the neural network through the camera, and the neural network outputs ‘Left Proximity’, ‘Left Far’, ‘Middle Proximity’, ‘Middle Far’, ‘Right Proximity’, and ‘Right Far’. For the problem that supervised learning needs a large amount of labeled data, automatic image classification and far and near framing are achieved by using camera stacking. The accuracy of the neural network test set by the improved bat algorithm reached 94.84%. In the six groups of continuous obstacle avoidance experiments, only one group violates the rules of obstacle avoidance, but there is no collision, so it can achieve better obstacle avoidance. Through the optimization transfer-CNN, the unmanned vehicle equipped with the visual crack detection camera is used to realize the automatic evaluation of the building structure safety. At this stage, the method proposed in this paper is only for static obstacles, but there are often dynamic obstacles such as moving humans in the indoor environment. Therefore, the perception and obstacle avoidance of dynamic obstacles is also the next research direction of indoor monocular ground vehicle.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}