
Enhanced Attitude and Altitude Estimation for Indoor Autonomous UAVs

 ,
,  ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. UAV Attitude and Altitude Estimation Problem
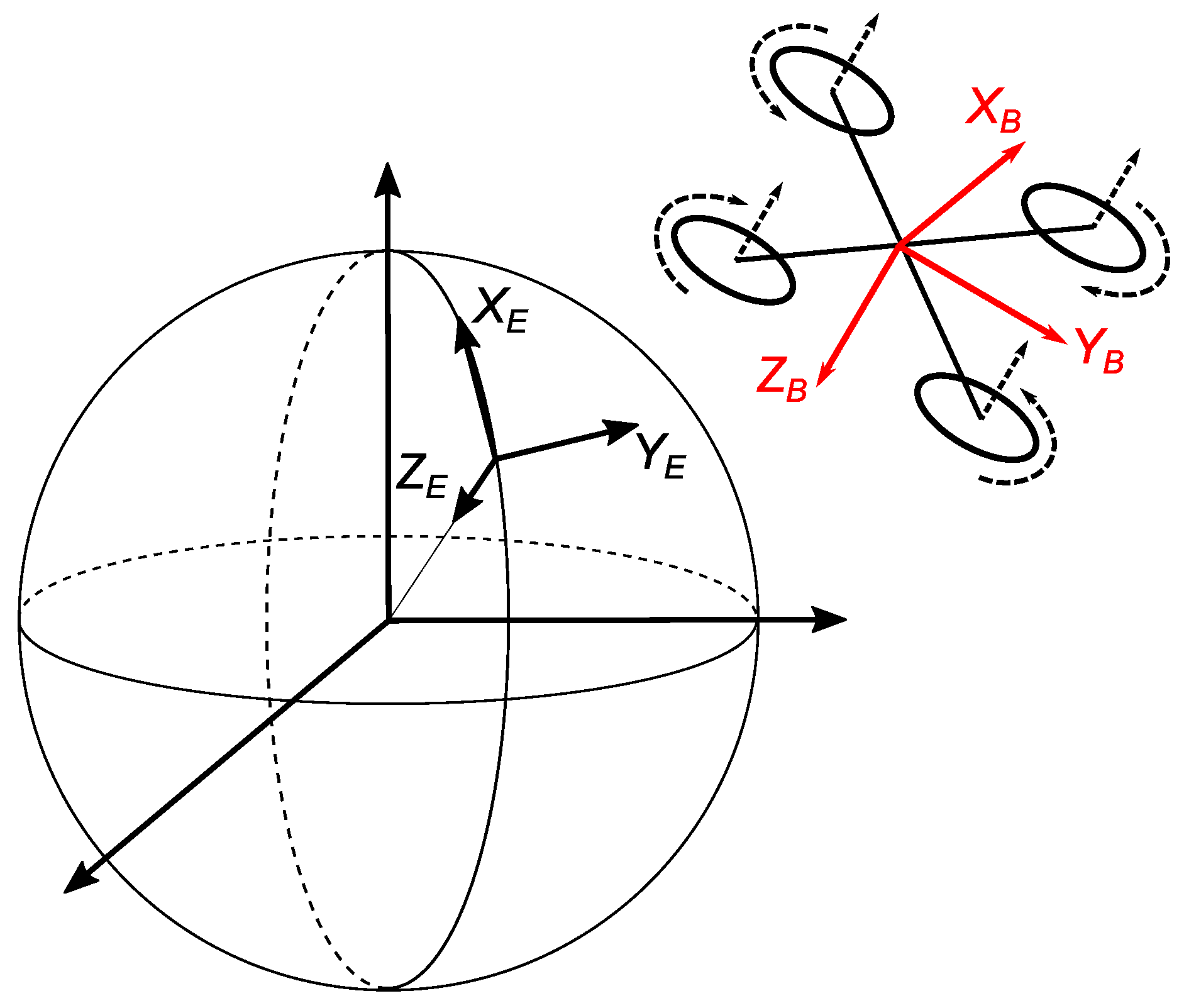
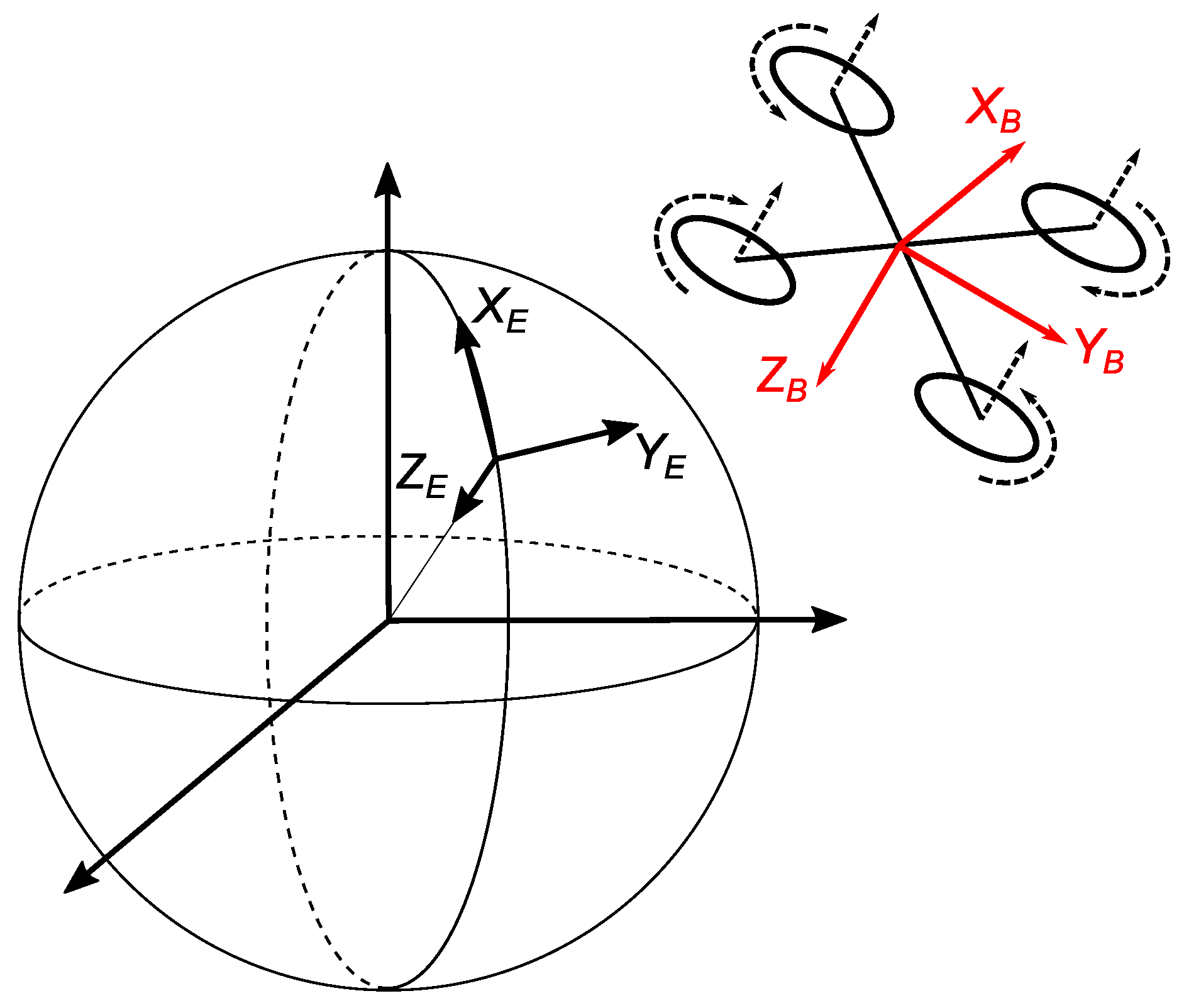
- North-East-Down (NED) Reference Frame, located on the earth surface, with:
- −
- -axis points north, parallel to the earth surface;
- −
- -axis points east, parallel to the earth surface;
- −
- -axis points downward, toward the earth surface.
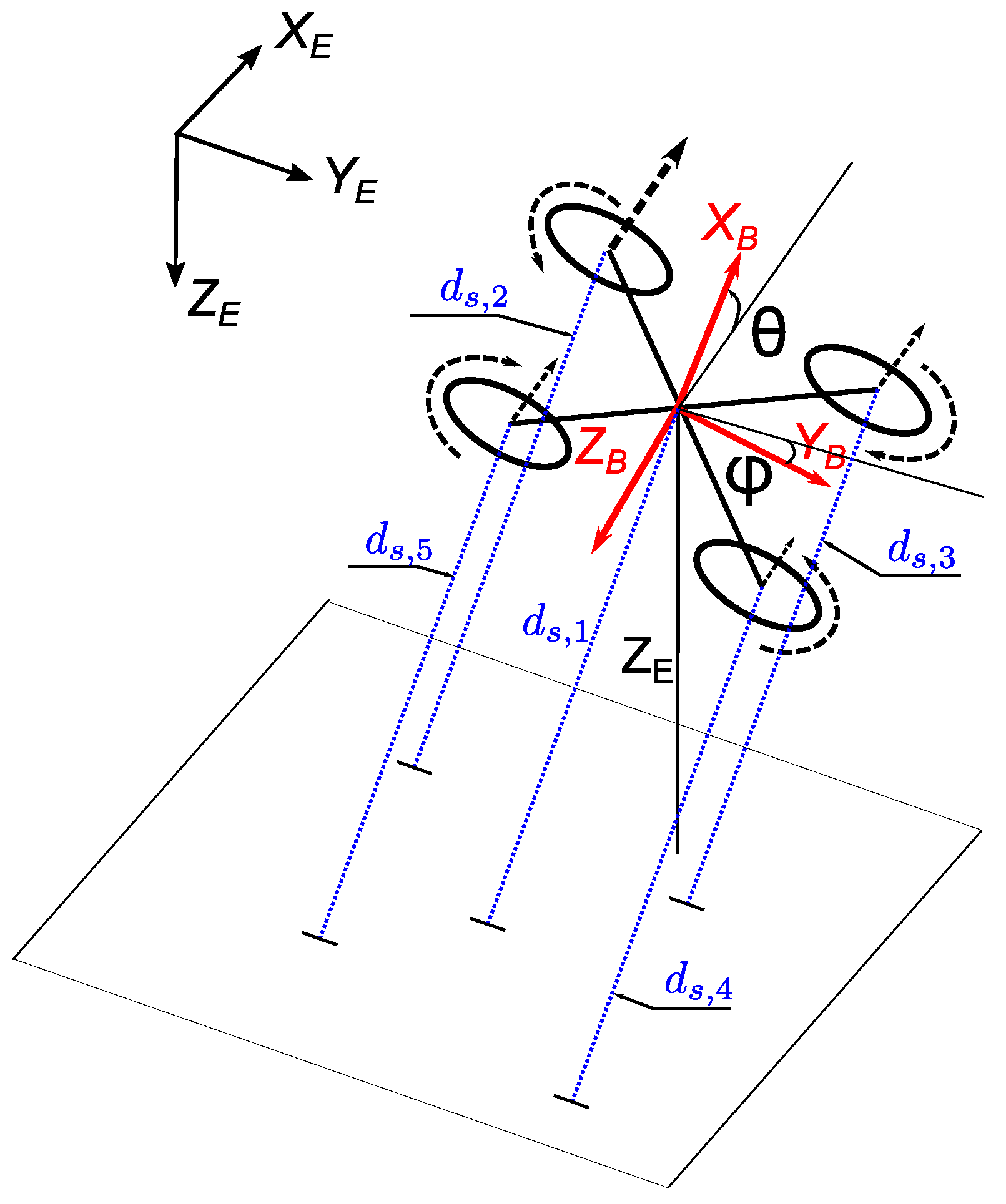
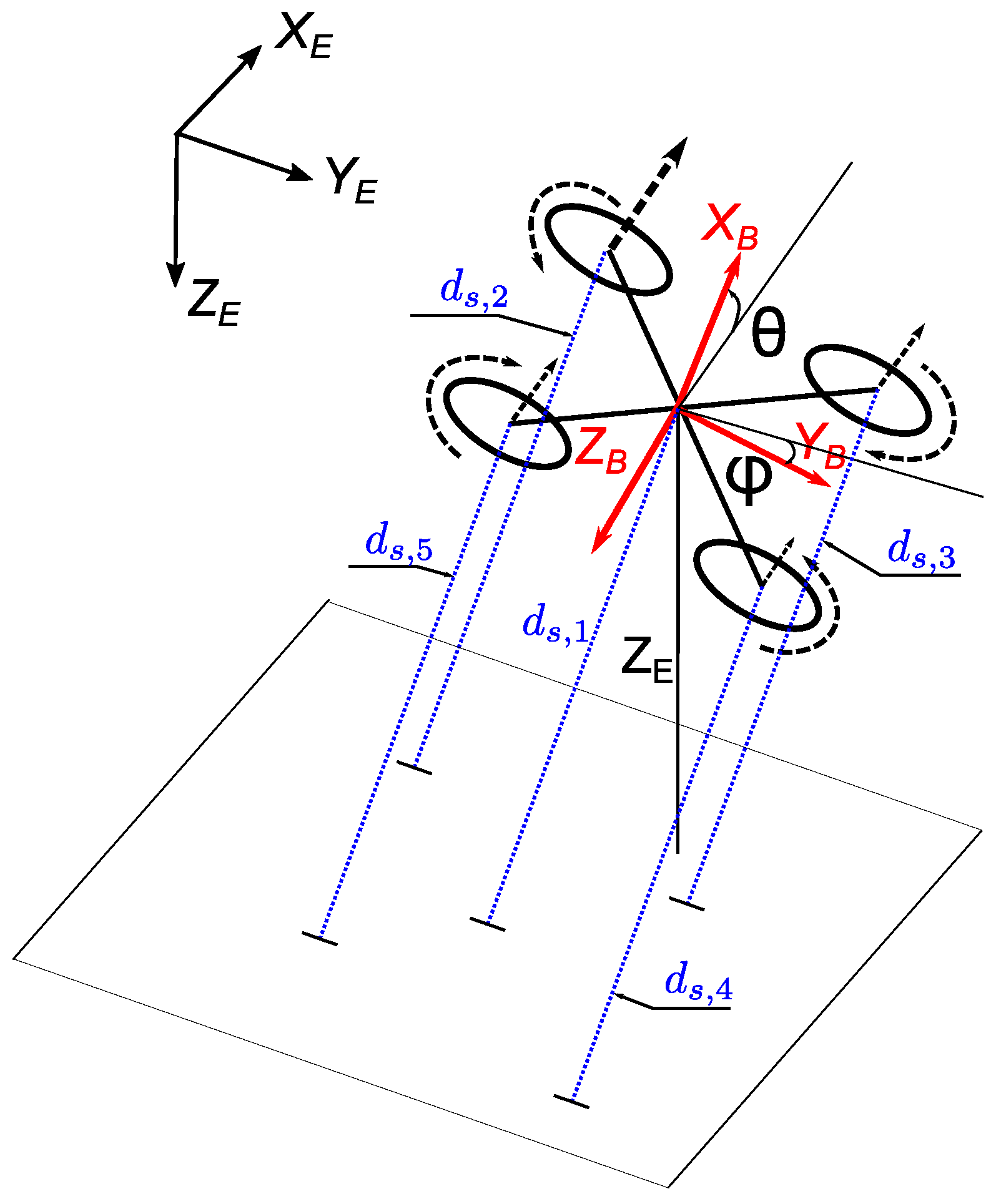
- Body Reference Frame, centred in the Center of Gravity () of the quadrotor, with:
- −
- -axis points along the arm 1–3, positive forward;
- −
- -axis points along the arm 2–4, positive rightward;
- −
- -axis points downward, to form a right-handed reference frame.
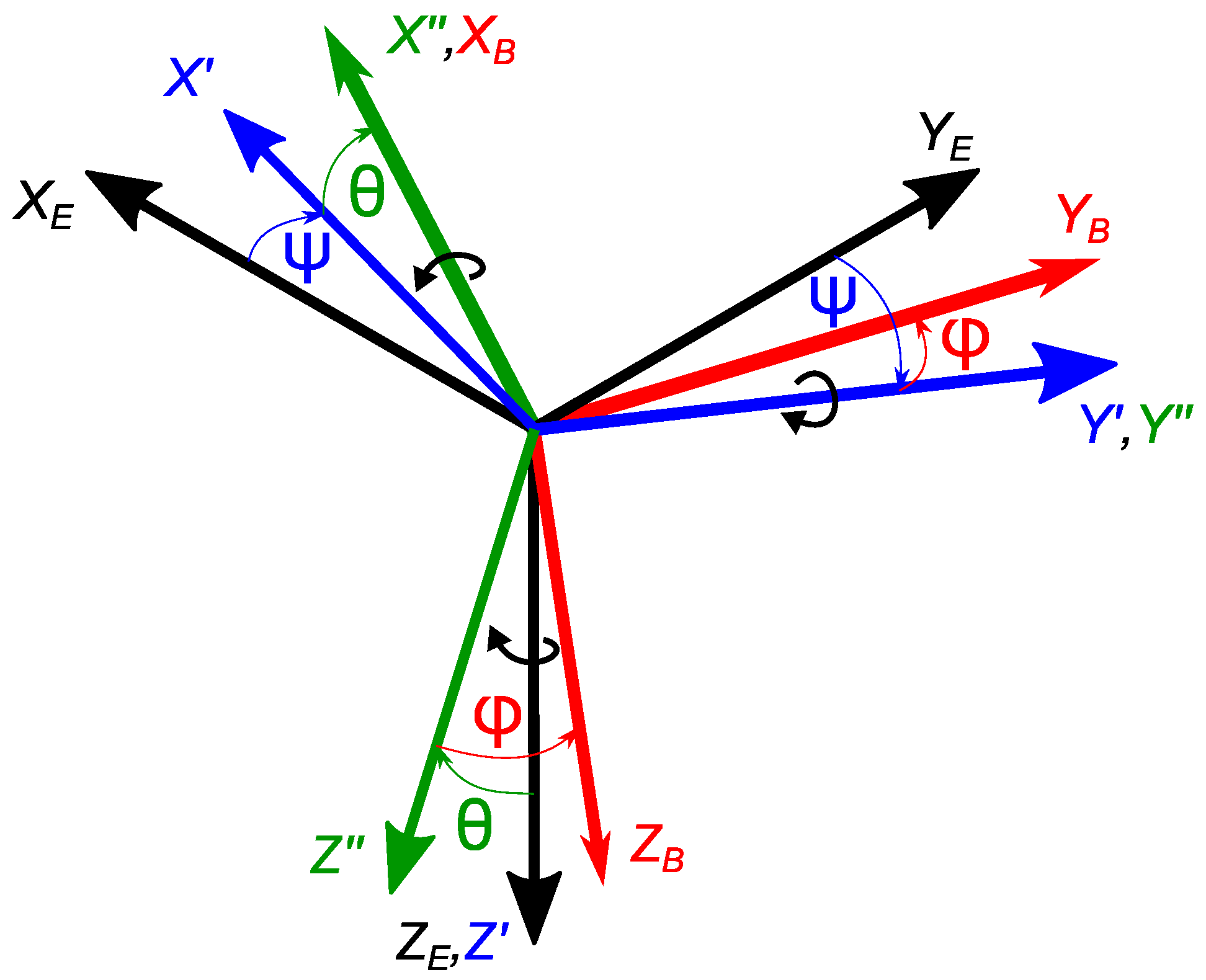
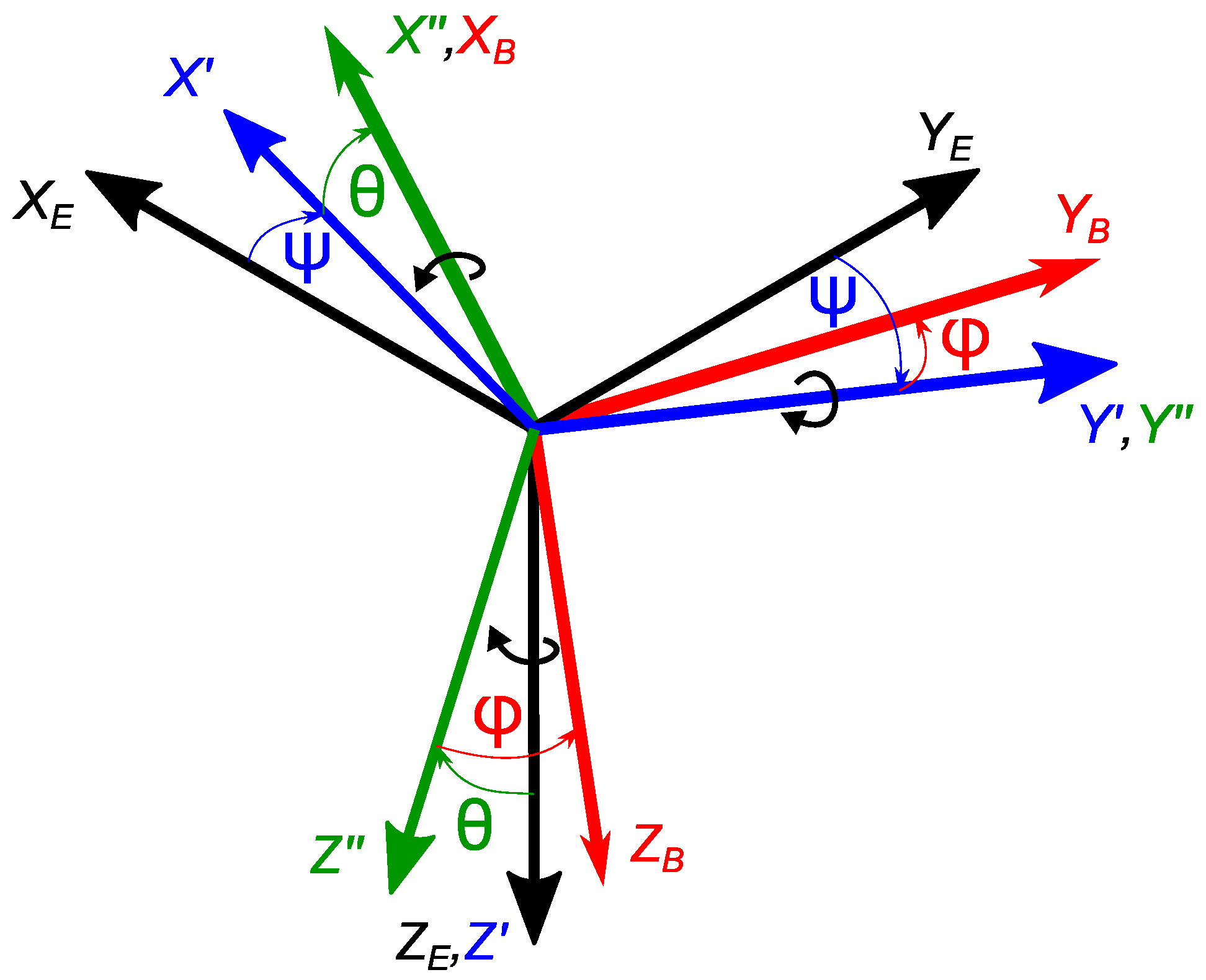
- a rotation around the axis by the yaw angle , from to ;
- a rotation around the axis by the pitch angle from to ;
- a rotation around the axis by the roll angle from to .
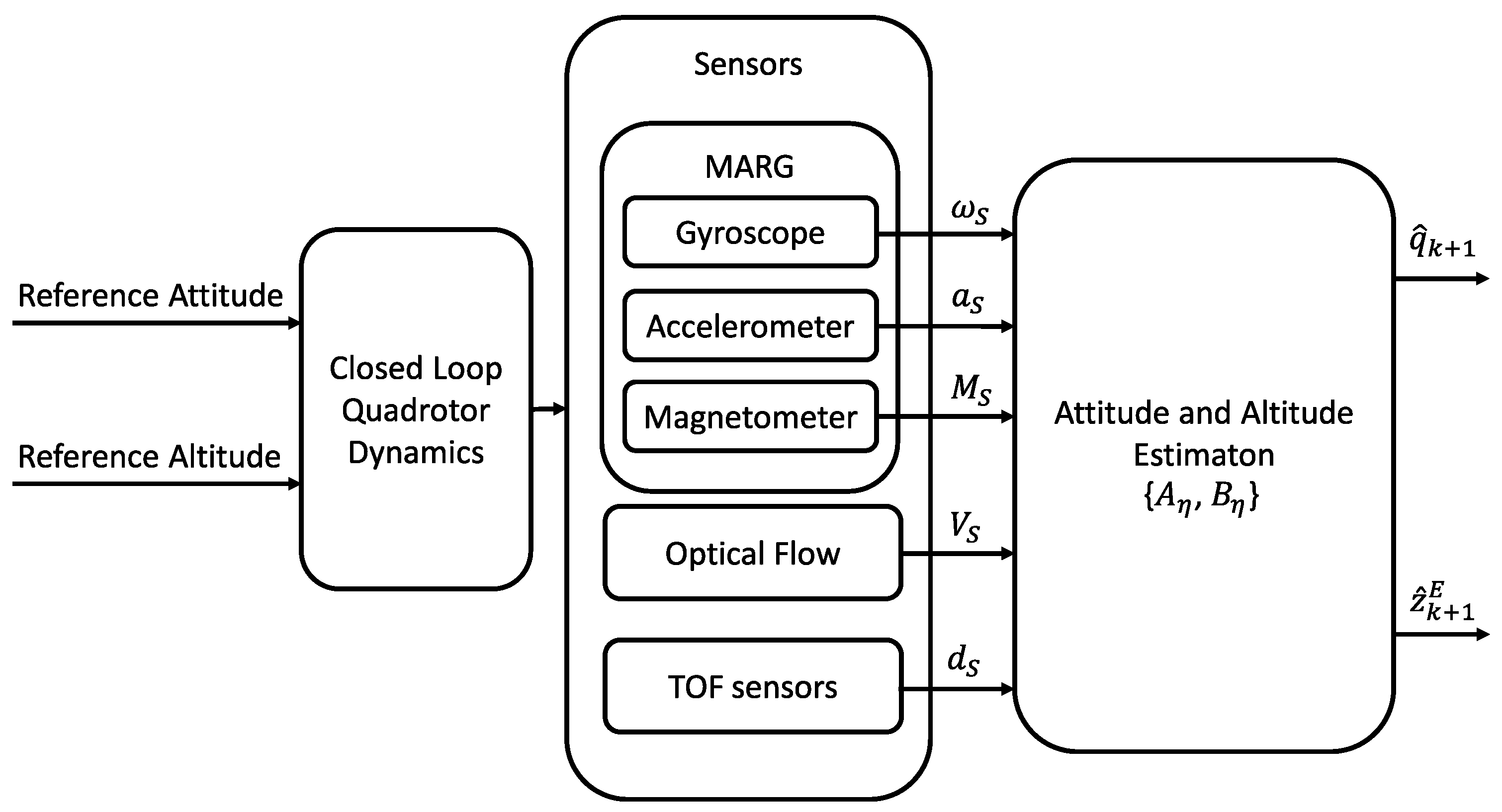
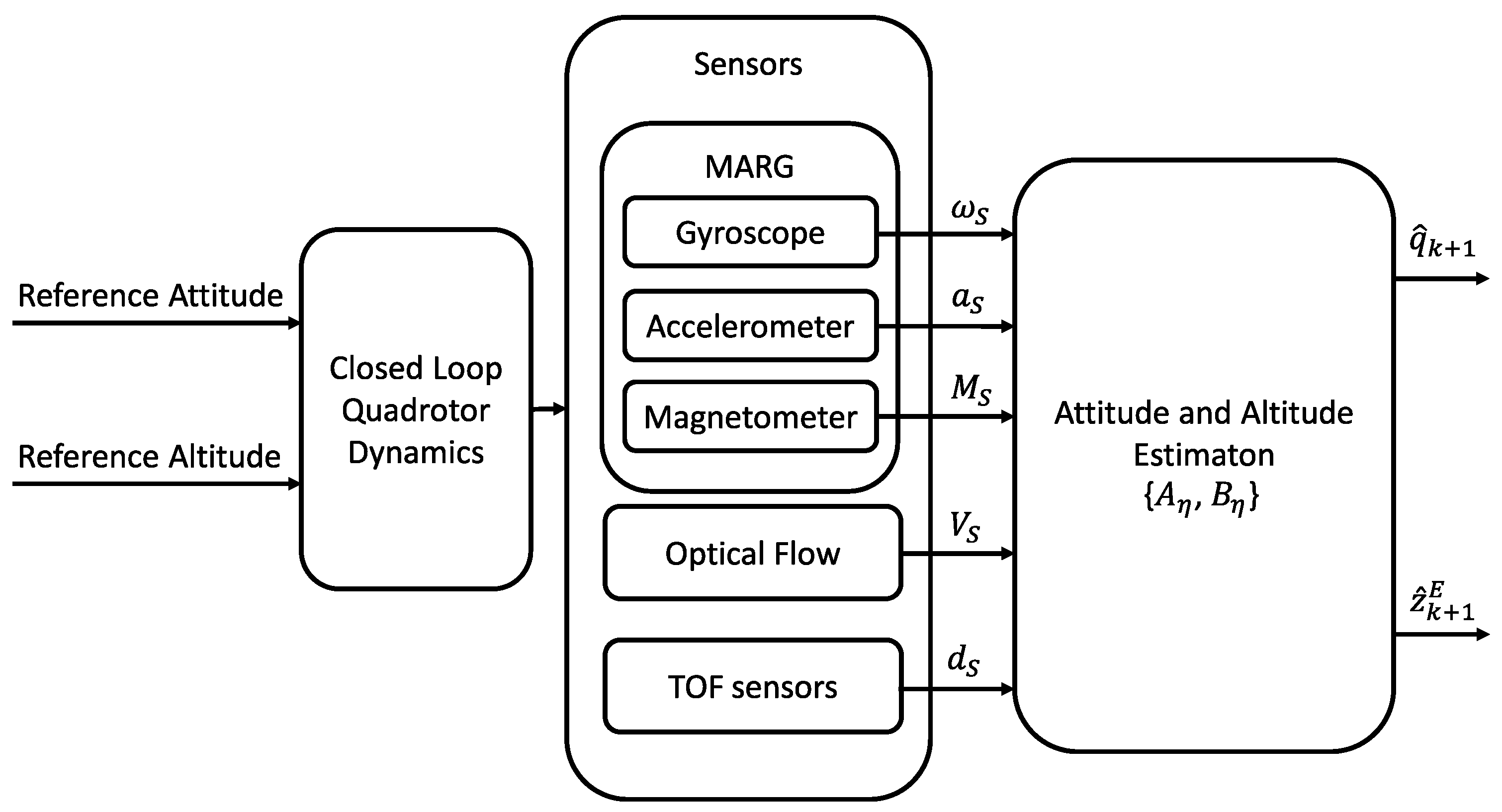
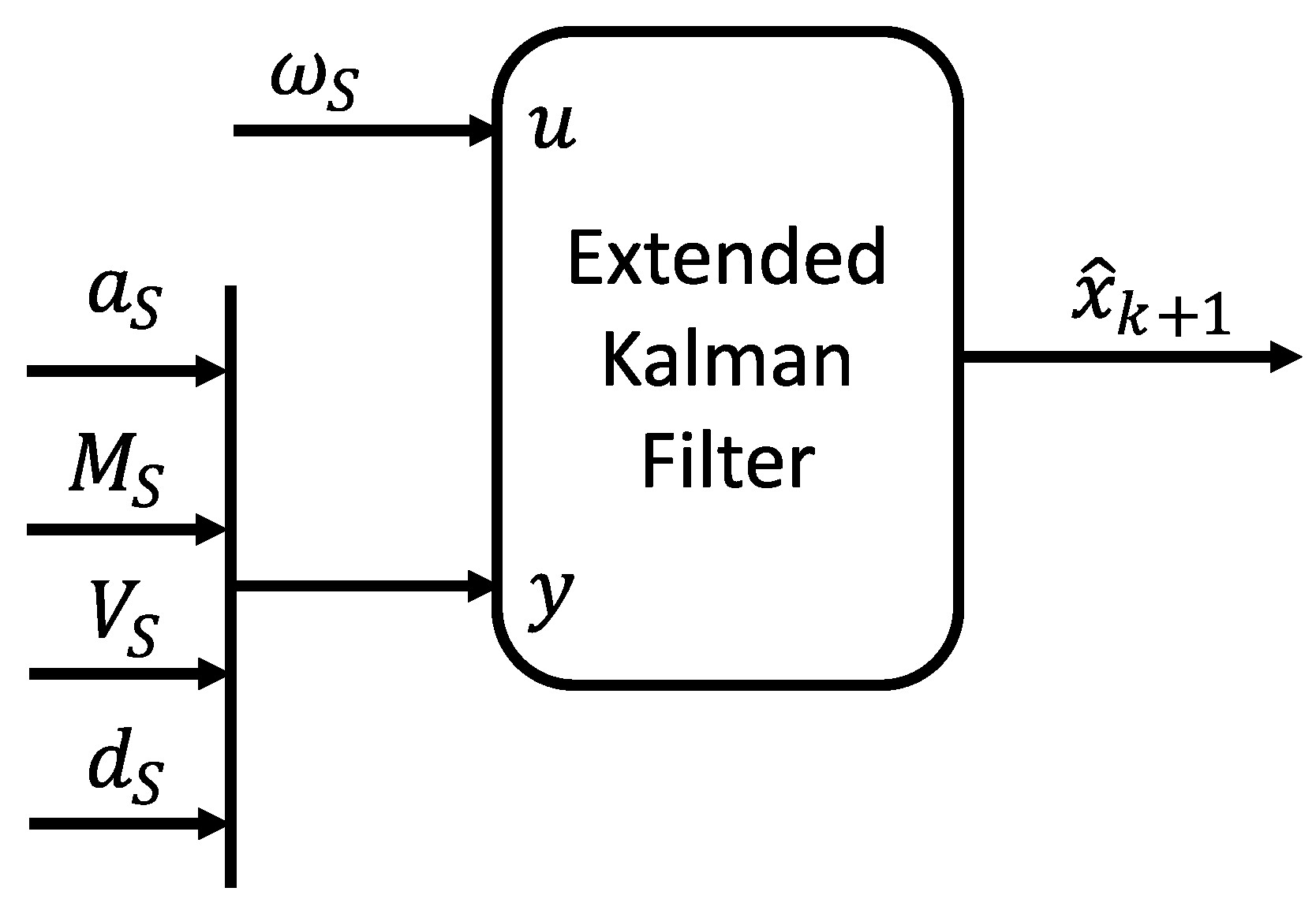
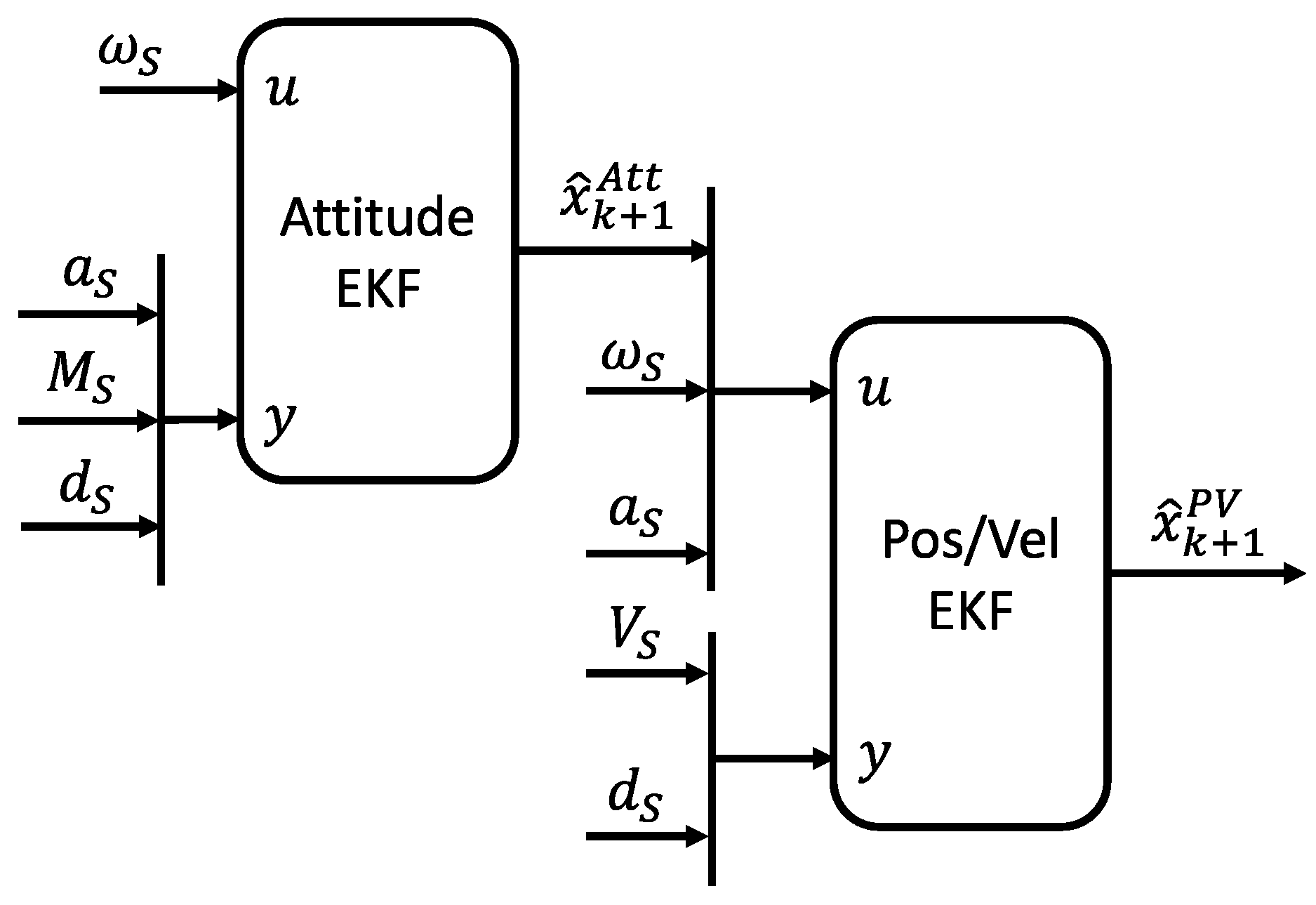
3. Multi-Rate Extended Kalman Filtering Approach
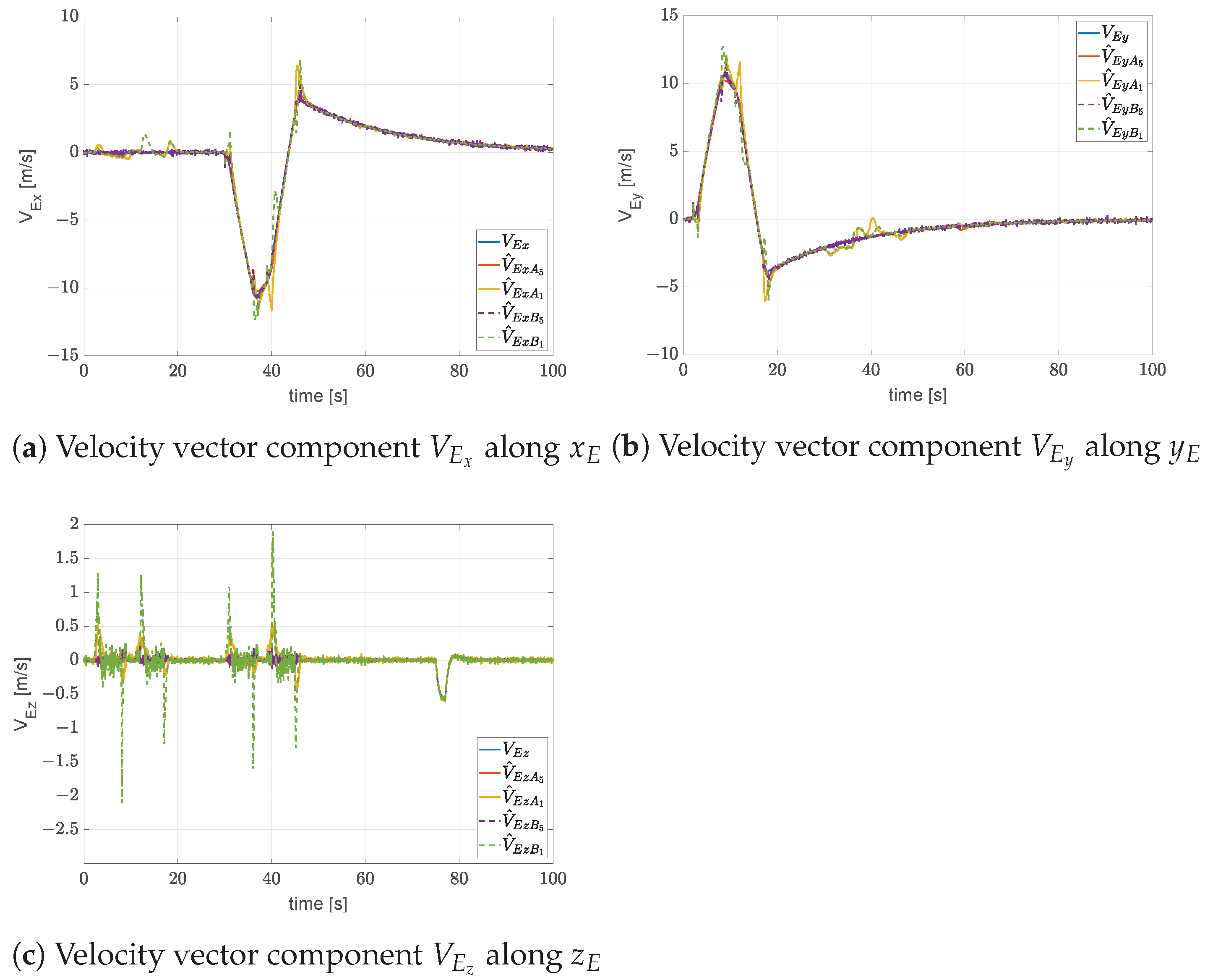
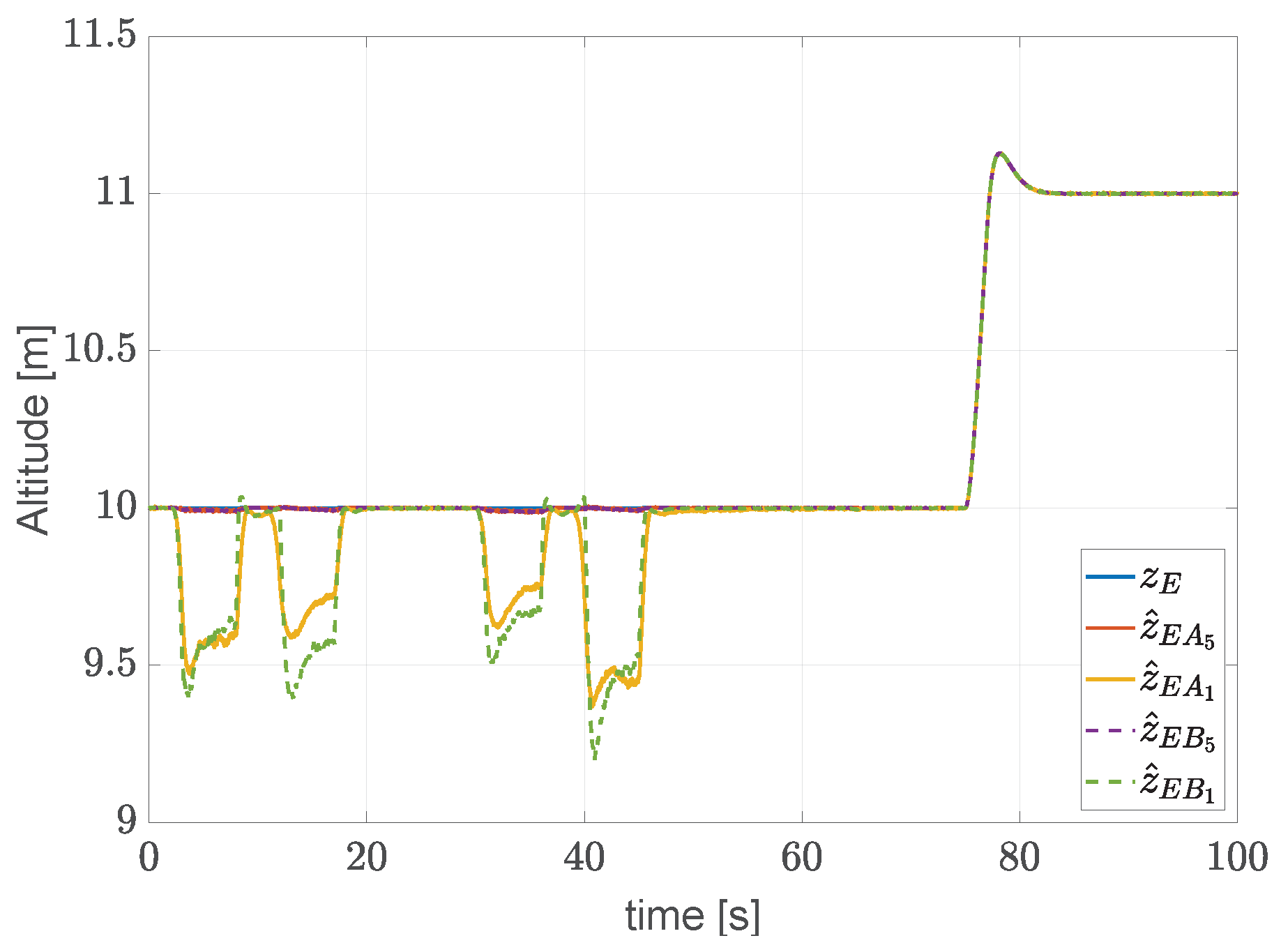
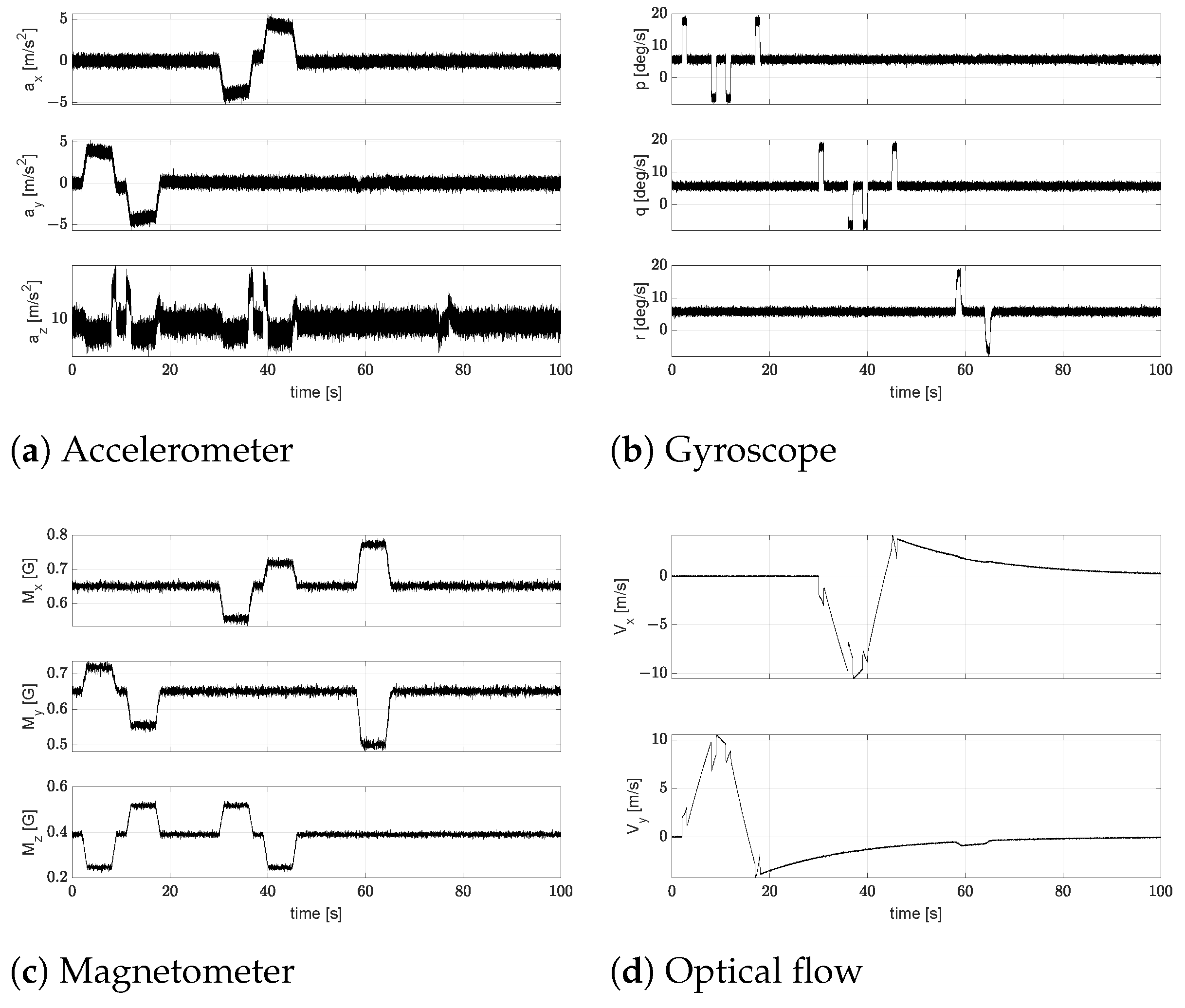
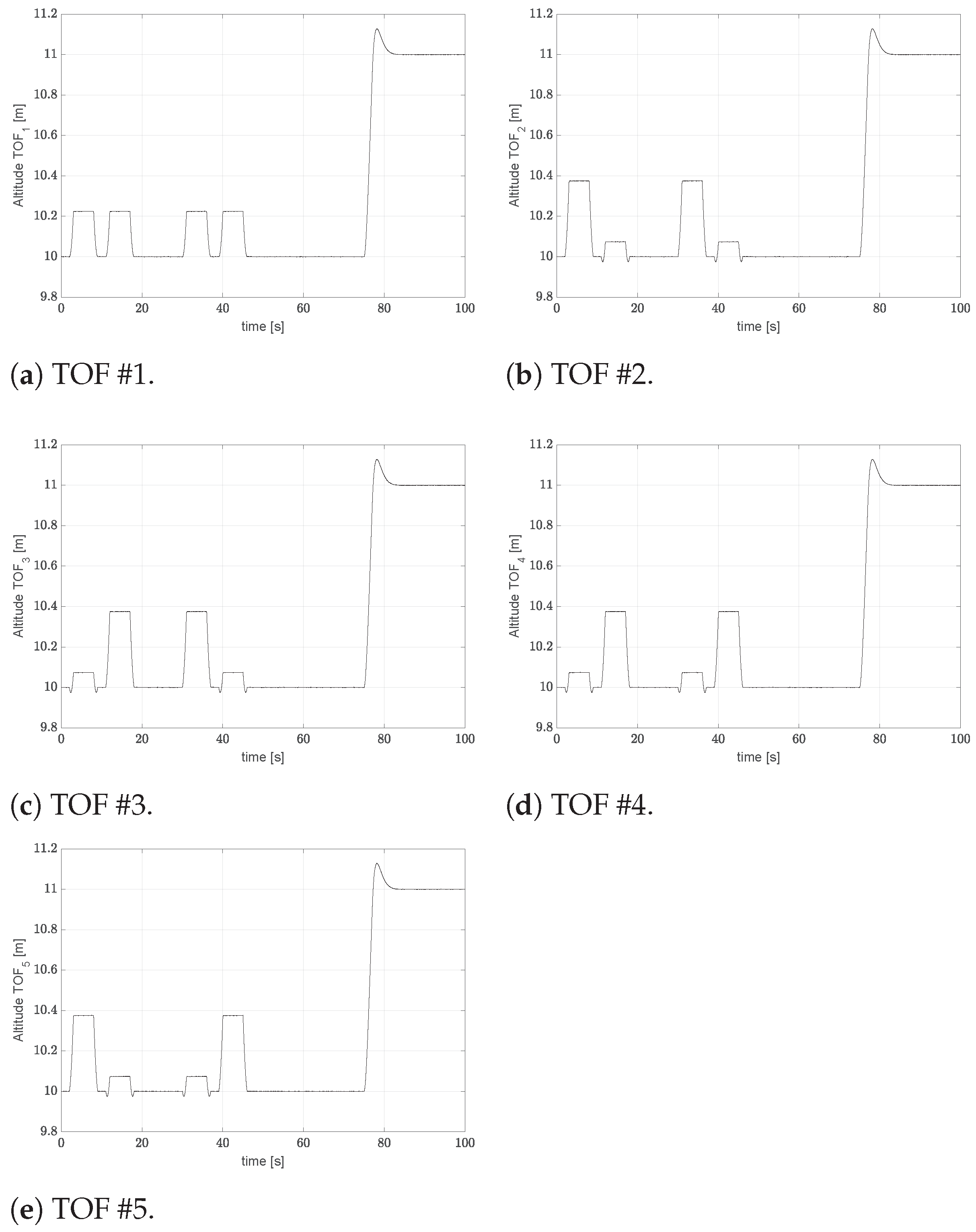
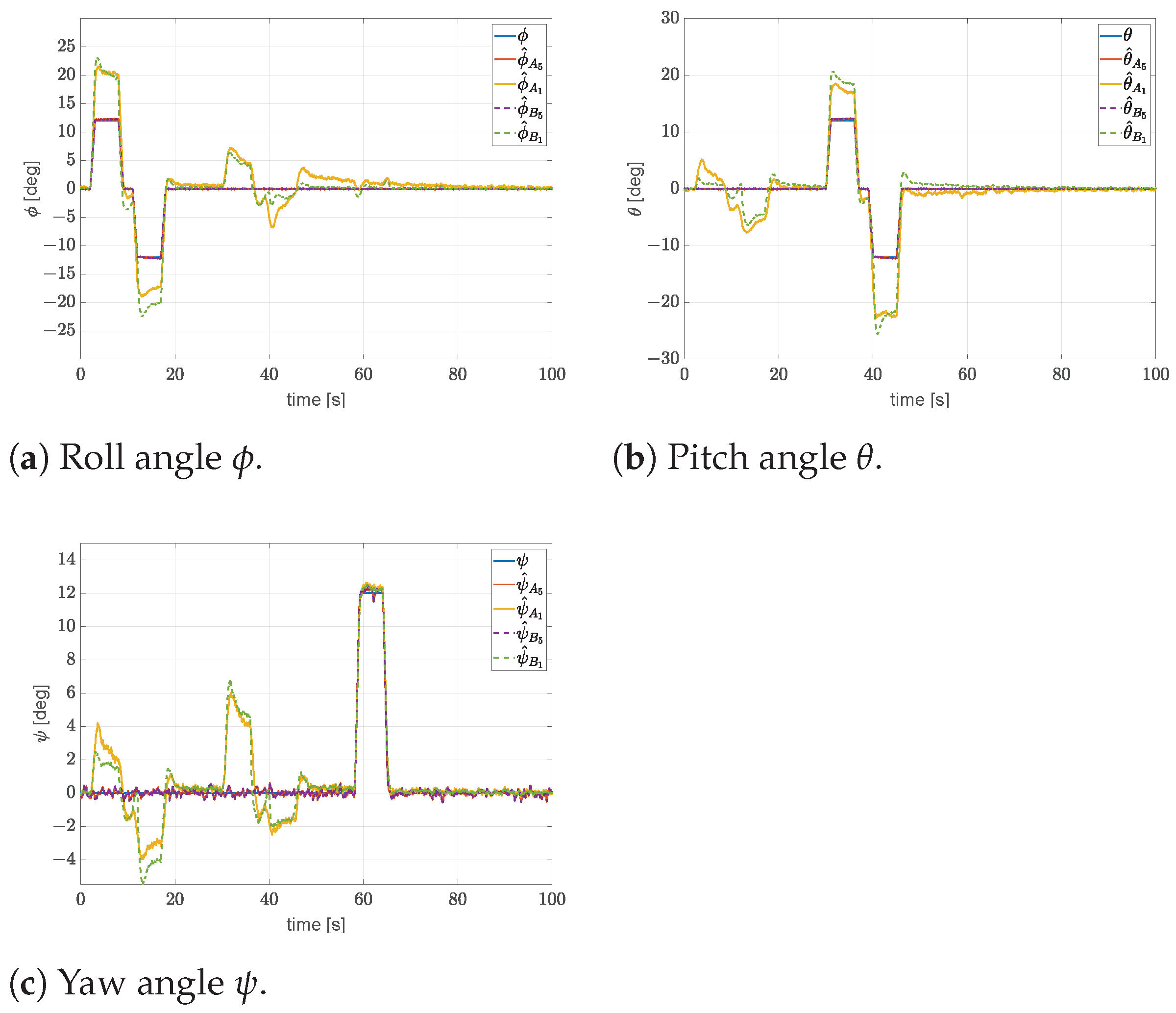
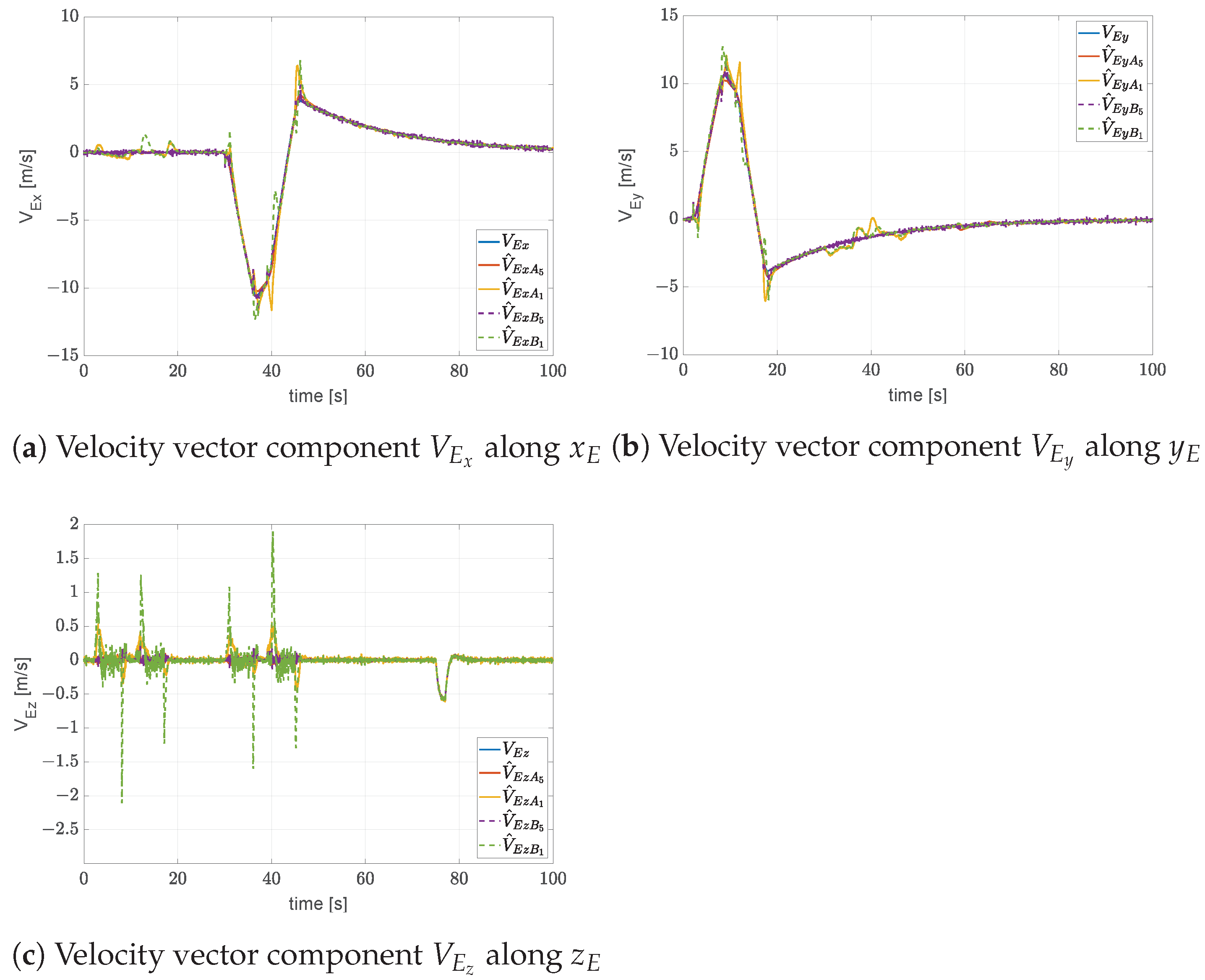
4. Results
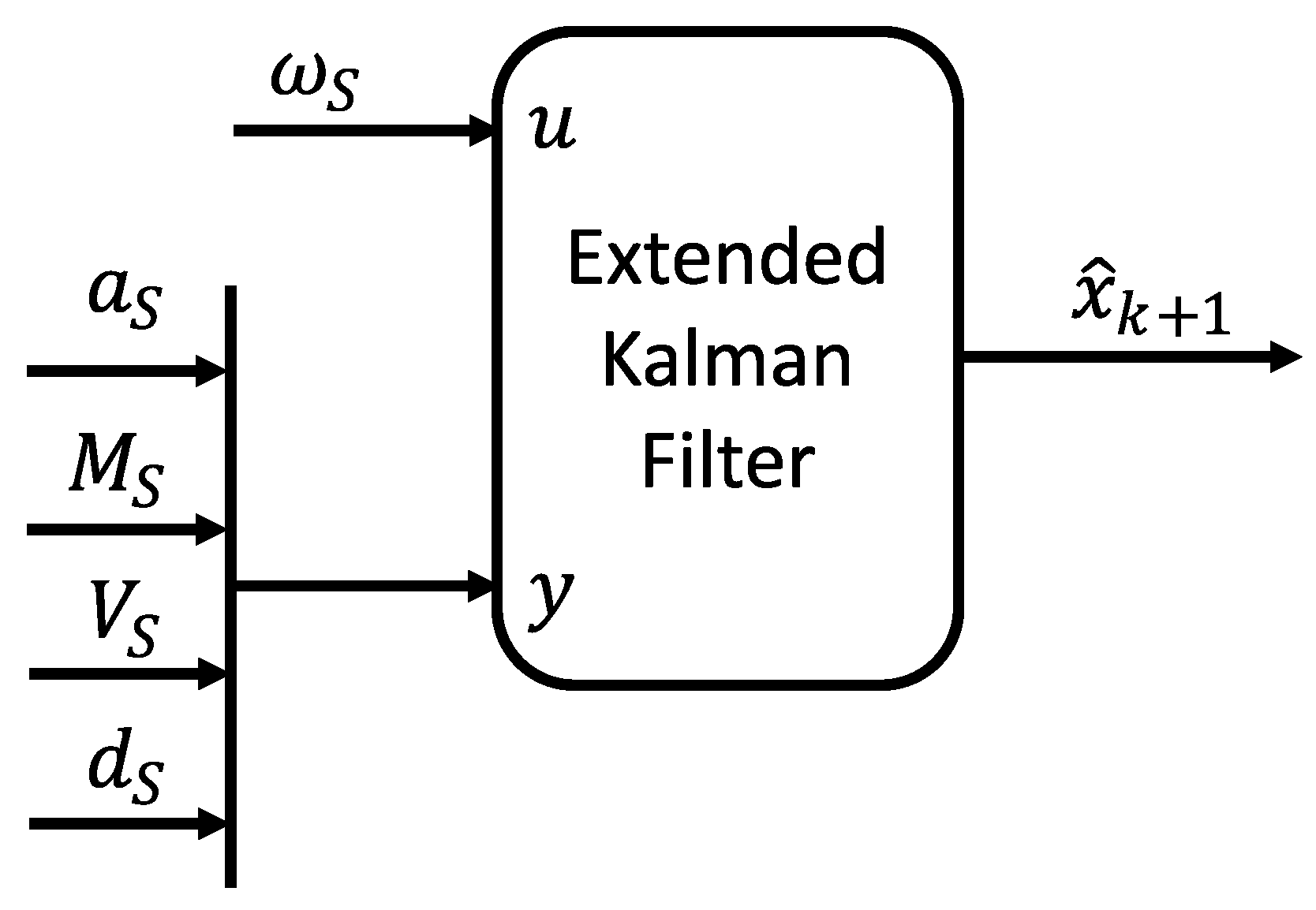
- and tightly coupled EKF architecture;
- and tightly coupled EKF architecture;
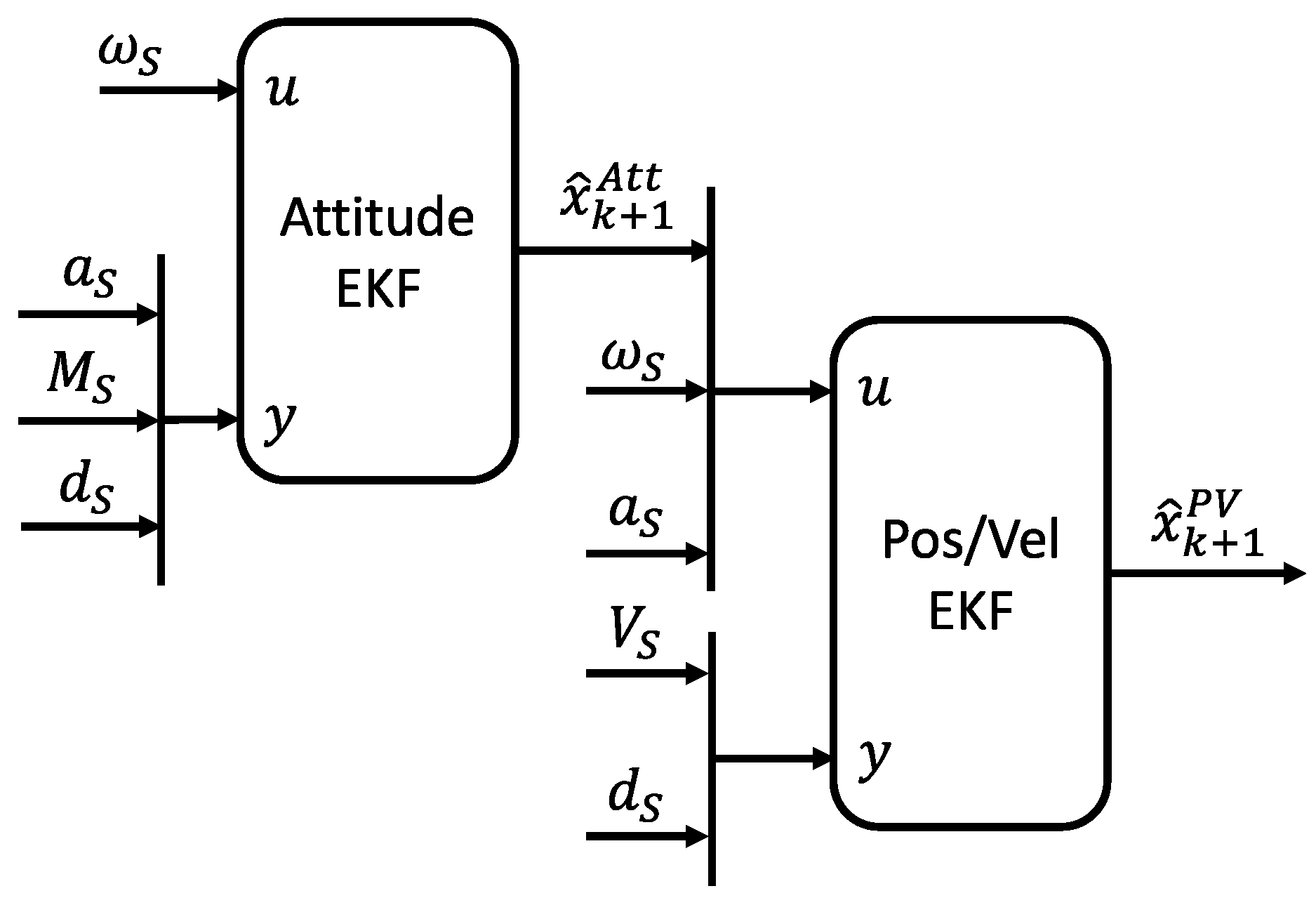
- and loosely coupled EKF architecture;
- and loosely coupled EKF architecture;
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Friedman, C.; Chopra, I.; Rand, O. Indoor/outdoor scan-matching based mapping technique with a helicopter MAV in GPS-denied environment. Int. J. Micro Air Veh. 2015, 7, 55–70. [Google Scholar] [CrossRef] [Green Version]
- Maza, I.; Caballero, F.; Capitan, J.; Martinez-de Dios, J.R.; Ollero, A. Firemen monitoring with multiple UAVs for search and rescue missions. In Proceedings of the 2010 IEEE Safety Security and Rescue Robotics, Bremen, Germany, 26–30 July 2010; pp. 1–6. [Google Scholar]
- Cole, D.T.; Sukkarieh, S.; Göktoğan, A.H. System development and demonstration of a UAV control architecture for information gathering missions. J. Field Robot. 2006, 23, 417–440. [Google Scholar] [CrossRef]
- Flores, G.; Zhou, S.; Lozano, R.; Castillo, P. A vision and GPS-based real-time trajectory planning for a MAV in unknown and low-sunlight environments. J. Intell. Robot. Syst. 2014, 74, 59–67. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.; El-Sheimy, N. Low-cost MEMS-based pedestrian navigation technique for GPS-denied areas. J. Sens. 2013, 2013, 197090. [Google Scholar] [CrossRef] [Green Version]
- Jang, J.S.; Liccardo, D. Small UAV automation using MEMS. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 30–34. [Google Scholar] [CrossRef]
- Barbour, N.; Schmidt, G. Inertial sensor technology trends. IEEE Sens. J. 2001, 1, 332–339. [Google Scholar] [CrossRef]
- Gośliński, J.; Giernacki, W.; Królikowski, A. A nonlinear filter for efficient attitude estimation of unmanned aerial vehicle (UAV). J. Intell. Robot. Syst. 2019, 95, 1079–1095. [Google Scholar] [CrossRef] [Green Version]
- D’Amato, E.; Nardi, V.A.; Notaro, I.; Scordamaglia, V. A Particle Filtering Approach for Fault Detection and Isolation of UAV IMU Sensors: Design, Implementation and Sensitivity Analysis. Sensors 2021, 21, 3066. [Google Scholar] [CrossRef]
- Bar-Itzhack, I.Y. REQUEST-A recursive QUEST algorithm for sequential attitude determination. J. Guid. Control Dyn. 1996, 19, 1034–1038. [Google Scholar] [CrossRef] [Green Version]
- Psiaki, M.L. Attitude-determination filtering via extended quaternion estimation. J. Guid. Control Dyn. 2000, 23, 206–214. [Google Scholar] [CrossRef]
- Ahmed, H.; Tahir, M. Accurate attitude estimation of a moving land vehicle using low-cost MEMS IMU sensors. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1723–1739. [Google Scholar] [CrossRef]
- Madgwick, S.O.; Harrison, A.J.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- Hua, M.D.; Ducard, G.; Hamel, T.; Mahony, R.; Rudin, K. Implementation of a nonlinear attitude estimator for aerial robotic vehicles. IEEE Trans. Control Syst. Technol. 2013, 22, 201–213. [Google Scholar] [CrossRef] [Green Version]
- Euston, M.; Coote, P.; Mahony, R.; Kim, J.; Hamel, T. A complementary filter for attitude estimation of a fixed-wing UAV. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 340–345. [Google Scholar]
- Wu, J.; Zhou, Z.; Fourati, H.; Li, R.; Liu, M. Generalized linear quaternion complementary filter for attitude estimation from multisensor observations: An optimization approach. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1330–1343. [Google Scholar] [CrossRef]
- Valenti, R.G.; Dryanovski, I.; Xiao, J. Keeping a good attitude: A quaternion-based orientation filter for IMUs and MARGs. Sensors 2015, 15, 19302–19330. [Google Scholar] [CrossRef] [Green Version]
- Caputo, F.; D’Amato, E.; Greco, A.; Notaro, I.; Spada, S. Human posture tracking system for industrial process design and assessment. In Intelligent Human Systems Integration; Springer International Publishing: Cham, Switzerland, 2018; pp. 450–455. [Google Scholar]
- Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait analysis using wearable sensors. Sensors 2012, 12, 2255–2283. [Google Scholar] [CrossRef] [PubMed]
- Sabatini, A.M. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef]
- Hung, T.N.; Suh, Y.S. Inertial sensor-based two feet motion tracking for gait analysis. Sensors 2013, 13, 5614–5629. [Google Scholar] [CrossRef]
- Caputo, F.; Greco, A.; D’Amato, E.; Notaro, I.; Sardo, M.L.; Spada, S.; Ghibaudo, L. A human postures inertial tracking system for ergonomic assessments. In Congress of the International Ergonomics Association; Springer: Berlin/Heidelberg, Germany, 2018; pp. 173–184. [Google Scholar]
- Barshan, B.; Durrant-Whyte, H.F. Inertial navigation systems for mobile robots. IEEE Trans. Robot. Autom. 1995, 11, 328–342. [Google Scholar] [CrossRef] [Green Version]
- Jun, M.; Roumeliotis, S.I.; Sukhatme, G.S. State estimation of an autonomous helicopter using Kalman filtering. In Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No. 99CH36289), Kyongju, Korea, 17–21 October 1999; Volume 3, pp. 1346–1353. [Google Scholar]
- Gebre-Egziabher, D.; Hayward, R.C.; Powell, J.D. Design of multi-sensor attitude determination systems. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 627–649. [Google Scholar] [CrossRef]
- Choukroun, D.; Bar-Itzhack, I.Y.; Oshman, Y. Novel quaternion Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 174–190. [Google Scholar] [CrossRef] [Green Version]
- D’Amato, E.; Notaro, I.; Mattei, M.; Tartaglione, G. Attitude and position estimation for an UAV swarm using consensus Kalman filtering. In Proceedings of the 2015 IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 4–5 June 2015; pp. 519–524. [Google Scholar]
- Hyyti, H.; Visala, A. A DCM Based Attitude Estimation Algorithm for Low-Cost MEMS IMUs. Int. J. Navig. Obs. 2015, 2015, 503814. [Google Scholar] [CrossRef] [Green Version]
- Costanzi, R.; Fanelli, F.; Monni, N.; Ridolfi, A.; Allotta, B. An attitude estimation algorithm for mobile robots under unknown magnetic disturbances. IEEE/ASME Trans. Mech. 2016, 21, 1900–1911. [Google Scholar] [CrossRef]
- De Marina, H.G.; Espinosa, F.; Santos, C. Adaptive UAV attitude estimation employing unscented Kalman filter, FOAM and low-cost MEMS sensors. Sensors 2012, 12, 9566–9585. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chiella, A.C.; Teixeira, B.O.; Pereira, G.A. Quaternion-based robust attitude estimation using an adaptive unscented Kalman filter. Sensors 2019, 19, 2372. [Google Scholar] [CrossRef] [Green Version]
- Oshman, Y.; Carmi, A. Attitude estimation from vector observations using a genetic-algorithm-embedded quaternion particle filter. J. Guid. Control Dyn. 2006, 29, 879–891. [Google Scholar] [CrossRef]
- Zhang, C.; Taghvaei, A.; Mehta, P.G. Attitude estimation with feedback particle filter. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 5440–5445. [Google Scholar]
- Cheng, Y.; Crassidis, J.L. Particle filtering for attitude estimation using a minimal local-error representation. J. Guid. Control Dyn. 2010, 33, 1305–1310. [Google Scholar] [CrossRef]
- Abdelkrim, N.; Aouf, N.; Tsourdos, A.; White, B. Robust nonlinear filtering for INS/GPS UAV localization. In Proceedings of the 2008 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008; pp. 695–702. [Google Scholar]
- Kumar, V. Integration of Inertial Navigation System and Global Positioning System Using Kalman Filtering; Indian Institute of Technology, Bombay Mumbai: Mumbai, India, 2004. [Google Scholar]
- Hua, M.D. Attitude estimation for accelerated vehicles using GPS/INS measurements. Control Eng. Pract. 2010, 18, 723–732. [Google Scholar] [CrossRef]
- Grip, H.F.; Fossen, T.I.; Johansen, T.A.; Saberi, A. Nonlinear observer for GNSS-aided inertial navigation with quaternion-based attitude estimation. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 272–279. [Google Scholar]
- Grayson, B.; Penna, N.T.; Mills, J.P.; Grant, D.S. GPS precise point positioning for UAV photogrammetry. Photogramm. Rec. 2018, 33, 427–447. [Google Scholar] [CrossRef] [Green Version]
- Gibson, J.J. The Perception of the Visual World; Riverside Press: Cambridge, UK, 1950. [Google Scholar]
- Lucas, B.D.; Kanade, T. An iterative image registration technique with an application to stereo vision. In Proceedings of the 7th International Joint Conference on Artificial Intelligence (IJCAI ’81), Vancouver, BC, Canada, 24–28 August 1981; Volume 81, pp. 674–679. [Google Scholar]
- Horn, B.K.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef] [Green Version]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Srinivasan, M.V. An image-interpolation technique for the computation of optic flow and egomotion. Biol. Cybern. 1994, 71, 401–415. [Google Scholar] [CrossRef]
- Zufferey, J.C.; Floreano, D. Toward 30-gram autonomous indoor aircraft: Vision-based obstacle avoidance and altitude control. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2594–2599. [Google Scholar]
- Shen, C.; Bai, Z.; Cao, H.; Xu, K.; Wang, C.; Zhang, H.; Wang, D.; Tang, J.; Liu, J. Optical flow sensor/INS/magnetometer integrated navigation system for MAV in GPS-denied environment. J. Sens. 2016, 2016, 6105803. [Google Scholar] [CrossRef] [Green Version]
- Chao, H.; Gu, Y.; Napolitano, M. A survey of optical flow techniques for robotics navigation applications. J. Intell. Robot. Syst. 2014, 73, 361–372. [Google Scholar] [CrossRef]
- Yu, Z.; Hu, Y.; Huang, J. GPS/INS/Odometer/DR integrated navigation system aided with vehicular dynamic characteristics for autonomous vehicle application. IFAC-PapersOnLine 2018, 51, 936–942. [Google Scholar] [CrossRef]
- Golovan, A.A. INS/Odometer Integration: Positional Approach. Gyroscopy Navig. 2021, 12, 186–194. [Google Scholar] [CrossRef]
- Honegger, D.; Meier, L.; Tanskanen, P.; Pollefeys, M. An open source and open hardware embedded metric optical flow cmos camera for indoor and outdoor applications. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1736–1741. [Google Scholar]
- Smith, R.; Self, M.; Cheeseman, P. Estimating uncertain spatial relationships in robotics. In Autonomous Robot Vehicles; Springer: Berlin/Heidelberg, Germany, 1990; pp. 167–193. [Google Scholar]
- Dissanayake, M.G.; Newman, P.; Clark, S.; Durrant-Whyte, H.F.; Csorba, M. A solution to the simultaneous localization and map building (SLAM) problem. IEEE Trans. Robot. Autom. 2001, 17, 229–241. [Google Scholar] [CrossRef] [Green Version]
- Dissanayake, G.; Williams, S.B.; Durrant-Whyte, H.; Bailey, T. Map management for efficient simultaneous localization and mapping (SLAM). Auton. Robot. 2002, 12, 267–286. [Google Scholar] [CrossRef]
- Williams, S.; Dissanayake, G.; Durrant-Whyte, H. Towards terrain-aided navigation for underwater robotics. Adv. Robot. 2001, 15, 533–549. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.H.; Sukkarieh, S. Airborne simultaneous localisation and map building. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No. 03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 406–411. [Google Scholar]
- Kim, J.; Sukkarieh, S. Autonomous airborne navigation in unknown terrain environments. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 1031–1045. [Google Scholar]
- Bryson, M.; Sukkarieh, S. Building a Robust Implementation of Bearing-only Inertial SLAM for a UAV. J. Field Robot. 2007, 24, 113–143. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Wang, K.; Lai, S.; Phang, S.K.; Chen, B.M.; Lee, T.H. An efficient UAV navigation solution for confined but partially known indoor environments. In Proceedings of the 11th IEEE International Conference on Control & Automation (ICCA), Taichung, Taiwan, 18–20 June 2014; pp. 1351–1356. [Google Scholar]
- Li, R.; Liu, J.; Zhang, L.; Hang, Y. LIDAR/MEMS IMU integrated navigation (SLAM) method for a small UAV in indoor environments. In Proceedings of the 2014 DGON Inertial Sensors and Systems (ISS), Karlsruhe, Germany, 16–17 September 2014; pp. 1–15. [Google Scholar]
- Albertos, P. Block multirate input-output model for sampled-data control systems. IEEE Trans. Autom. Control 1990, 35, 1085–1088. [Google Scholar] [CrossRef]
- Kranc, G. Input-output analysis of multirate feedback systems. IRE Trans. Autom. Control 1957, 3, 21–28. [Google Scholar] [CrossRef]
- Khargonekar, P.; Poolla, K.; Tannenbaum, A. Robust control of linear time-invariant plants using periodic compensation. IEEE Trans. Autom. Control 1985, 30, 1088–1096. [Google Scholar] [CrossRef] [Green Version]
- Blanco, J.L. A tutorial on se (3) transformation parameterizations and on-manifold optimization. Univ. Malaga Tech. Rep 2010, 3, 6. [Google Scholar]
- Markley, F.L. Attitude error representations for Kalman filtering. J. Guid. Control Dyn. 2003, 26, 311–317. [Google Scholar] [CrossRef]
- Park, S.; Horowitz, R.; Tan, C.W. Dynamics and control of a MEMS angle measuring gyroscope. Sens. Actuators A Phys. 2008, 144, 56–63. [Google Scholar] [CrossRef]
- Vitali, A. Noise Analysis and Identification in MEMS Sensors, Allan, Time, Hadamard, Overlapping, Modified, Total Variance; Technical Report DT0064; STMicroelectronics: Geneva, Switzerland, 2016. [Google Scholar]
- D’Amato, E.; Mattei, M.; Notaro, I.; Scordamaglia, V. UAV Sensor FDI in Duplex Attitude Estimation Architectures Using a Set-Based Approach. IEEE Trans. Instrum. Meas. 2018, 67, 2465–2475. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Markley, F.L.; Cheng, Y. Survey of nonlinear attitude estimation methods. J. Guid. Control Dyn. 2007, 30, 12–28. [Google Scholar] [CrossRef]
- D’Amato, E.; Mattei, M.; Mele, A.; Notaro, I.; Scordamaglia, V. Fault tolerant low cost IMUS for UAVs. In Proceedings of the 2017 IEEE International Workshop on Measurement and Networking, Naples, Italy, 27–29 September 2017; pp. 1–6. [Google Scholar]
- Quinchia, A.G.; Falco, G.; Falletti, E.; Dovis, F.; Ferrer, C. A comparison between different error modeling of MEMS applied to GPS/INS integrated systems. Sensors 2013, 13, 9549–9588. [Google Scholar] [CrossRef] [Green Version]
- Tereshkov, V.M. A simple observer for gyro and accelerometer biases in land navigation systems. J. Navig. 2015, 68, 635–645. [Google Scholar] [CrossRef] [Green Version]
- Hamel, T.; Mahony, R. Attitude estimation on SO[3] based on direct inertial measurements. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 2170–2175. [Google Scholar]
- Thienel, J.; Sanner, R. A coupled nonlinear spacecraft attitude controller and observer with an unknown constant gyro bias and gyro noise. IEEE Trans. Autom. Control 2003, 48, 2011–2015. [Google Scholar] [CrossRef]
- Atesoglu, Ö.; Nalbantoglu, V.; Seymen, B. Gyro-bias estimation filter design for the stabilization accuracy enhancement of two axes gimbaled sighting systems. IFAC Proc. Vol. 2008, 41, 5011–5017. [Google Scholar] [CrossRef]
- Bauer, P.; Bokor, J. Multi-mode extended Kalman filter for aircraft attitude estimation. IFAC Proc. Vol. 2011, 44, 7244–7249. [Google Scholar] [CrossRef]
- Lam, Q.; Stamatakos, N.; Woodruff, C.; Ashton, S. Gyro modeling and estimation of its random noise sources. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Austin, TX, USA, 11–14 August 2003; p. 5562. [Google Scholar]
- Kok, M.; Hol, J.D.; Schön, T.B. Using Inertial Sensors for Position and Orientation Estimation. Found. Trends Signal Process. 2017, 11, 1–153. [Google Scholar] [CrossRef] [Green Version]
- Afzal, M.H.; Renaudin, V.; Lachapelle, G. Assessment of indoor magnetic field anomalies using multiple magnetometers. In Proceedings of the ION GNSS10, Portland, OR, USA, 21–24 September 2010; pp. 525–533. [Google Scholar]
- Afzal, M.H.; Renaudin, V.; Lachapelle, G. Multi-Magnetometer Based Perturbation Mitigation for Indoor Orientation Estimation. Navigation 2011, 58, 279–292. [Google Scholar] [CrossRef]
- Renaudin, V.; Afzal, M.H.; Lachapelle, G. New method for magnetometers based orientation estimation. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 348–356. [Google Scholar] [CrossRef]
- Kuevor, P.E.; Cutler, J.W.; Atkins, E.M. Improving Attitude Estimation Using Gaussian-Process-Regression-Based Magnetic Field Maps. Sensors 2021, 21, 6351. [Google Scholar] [CrossRef]
- Hellmers, H.; Norrdine, A.; Blankenbach, J.; Eichhorn, A. An IMU/magnetometer-based Indoor positioning system using Kalman filtering. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard, France, 28–31 October 2013; pp. 1–9. [Google Scholar] [CrossRef]
- Mahony, R.; Hamel, T.; Pflimlin, J.M. Nonlinear complementary filters on the special orthogonal group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Arm length—[m] | 1 |
| Mass—[kg] | 0.6 |
| Gyroscope sampling frequency—[Hz] | |
| Accelerometer sampling frequency—[Hz] | |
| Magnetometer sampling frequency—[Hz] | |
| Optical Flow sampling frequency—[Hz] | 10 |
| TOF sampling frequency—[Hz] | 50 |
| Gyroscope bias—[rad/s] | |
| Accelerometer bias—[m/s2] | |
| Magnetometer bias—[G] | |
| Optical Flow bias—[m/s] | |
| TOF bias—[m] | |
| Gyroscope noise covariance—[(rad/s)] | |
| Accelerometer noise covariance—[(m/s2)2] | |
| Magnetometer noise covariance—[(G)] | |
| Optical Flow noise covariance—[(m/s)] | |
| TOF noise covariance—[(m)] |
| Model | Model | Model | Model | |
|---|---|---|---|---|
| [deg] | 0.0066 | 0.7369 | 0.0063 | 0.2156 |
| [deg] | 0.0098 | 0.6616 | 0.0096 | 0.0707 |
| [deg] | 0.0179 | 0.2104 | 0.019 | 0.1572 |
| [m] | 0.0012 | 0.084 | 0.0013 | 0.0899 |
| [m/s] | 0.0106 | 0.0149 | 0.0075 | 0.0594 |
| [m/s] | 0.0174 | 0.0089 | 0.009 | 0.0082 |
| [m/s] | 0.0055 | 0.017 | 0.0058 | 0.0055 |
| Model | Model | Model | Model | |
|---|---|---|---|---|
| [deg] | 0.0619 | 2.8755 | 0.0640 | 3.0172 |
| [deg] | 0.0730 | 3.0470 | 0.0770 | 3.0838 |
| [deg] | 0.1949 | 1.5606 | 0.1979 | 1.66002 |
| [m] | 0.0028 | 0.1627 | 0.0030 | 0.1851 |
| [m/s] | 0.1042 | 0.4232 | 0.1316 | 0.4406 |
| [m/s] | 0.1136 | 0.4255 | 0.1307 | 0.3780 |
| [m/s] | 0.0231 | 0.0858 | 0.0250 | 0.1941 |
| Model | Model | Model | Model | |
|---|---|---|---|---|
| CPU % | 3.34 | 3.15 | 3.03 | 1.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bassolillo, S.R.; D’Amato, E.; Notaro, I.; Ariante, G.; Del Core, G.; Mattei, M. Enhanced Attitude and Altitude Estimation for Indoor Autonomous UAVs. Drones 2022, 6, 18. https://doi.org/10.3390/drones6010018
Bassolillo SR, D’Amato E, Notaro I, Ariante G, Del Core G, Mattei M. Enhanced Attitude and Altitude Estimation for Indoor Autonomous UAVs. Drones. 2022; 6(1):18. https://doi.org/10.3390/drones6010018
Chicago/Turabian StyleBassolillo, Salvatore Rosario, Egidio D’Amato, Immacolata Notaro, Gennaro Ariante, Giuseppe Del Core, and Massimiliano Mattei. 2022. "Enhanced Attitude and Altitude Estimation for Indoor Autonomous UAVs" Drones 6, no. 1: 18. https://doi.org/10.3390/drones6010018
APA StyleBassolillo, S. R., D’Amato, E., Notaro, I., Ariante, G., Del Core, G., & Mattei, M. (2022). Enhanced Attitude and Altitude Estimation for Indoor Autonomous UAVs. Drones, 6(1), 18. https://doi.org/10.3390/drones6010018