
Performance Enhancement of Optimized Link State Routing Protocol by Parameter Configuration for UANET



Abstract
:1. Introduction
- Swarm-based routing;
- Position-based routing;
- Topology-based routing.
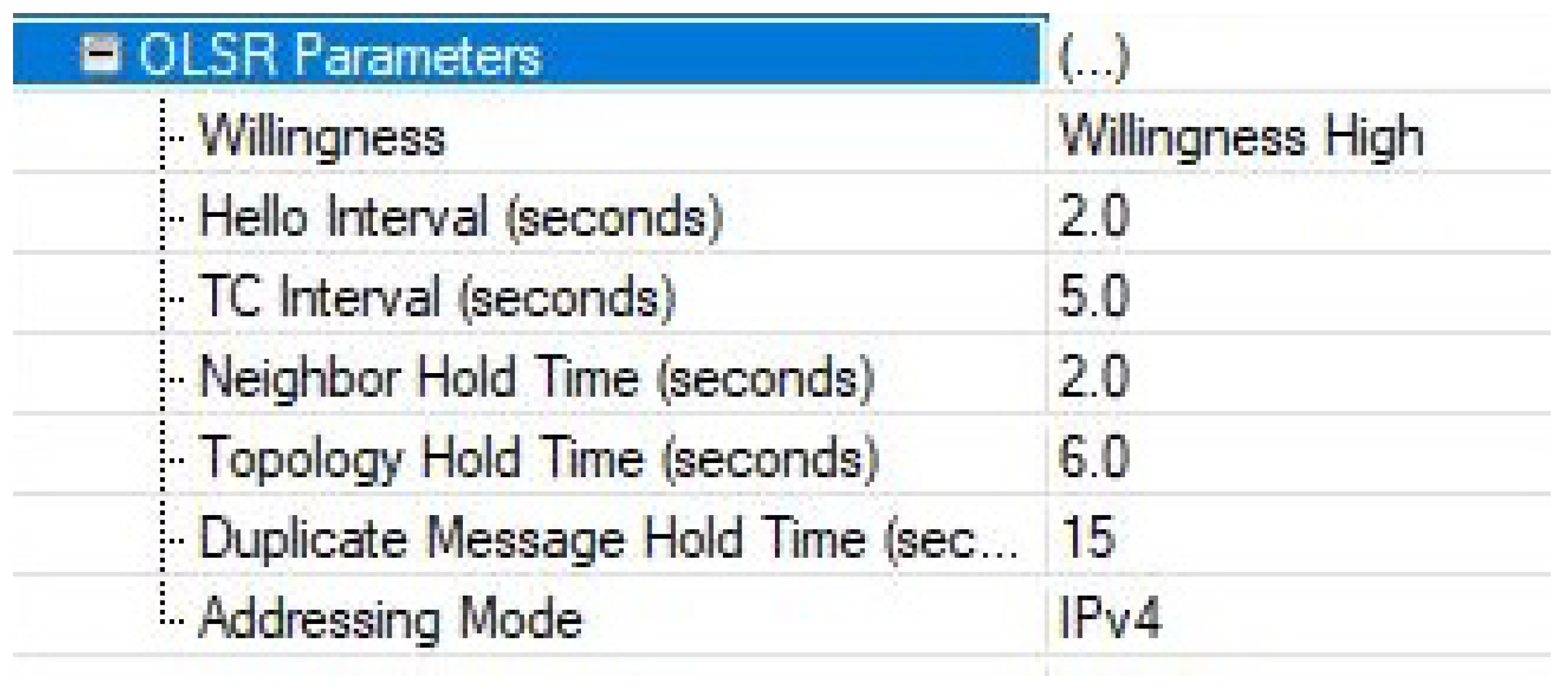
- The OLSR protocol’s configuration settings have been optimized to make it appropriate for UANETs;
- Analyzes routing protocol performance in the OPNET simulator by creating realistic UANET scenarios where optimized OLSR configurations outperform the default one;
- Finally, a comparison of the existing well-known topology-based routing protocols (AODV, OLSR, DSR, and GRP) with optimized E-OLSR based on the performance metrics such as throughput, delay, and data drop rate is conducted.
2. Routing Protocols for UAV Communication
2.1. Dynamic Source Routing (DSR)
2.2. Ad Hoc On-Demand Distance Vector(AODV)
2.3. Geographic Routing Protocol (GRP)
2.4. Optimized Link State Routing (OLSR)
Enhanced Optimized Link State Routing (E-OLSR)
3. Research Methodology
3.1. Performance Metrics
3.1.1. Throughput
3.1.2. Delay
3.1.3. Data Drop Rate
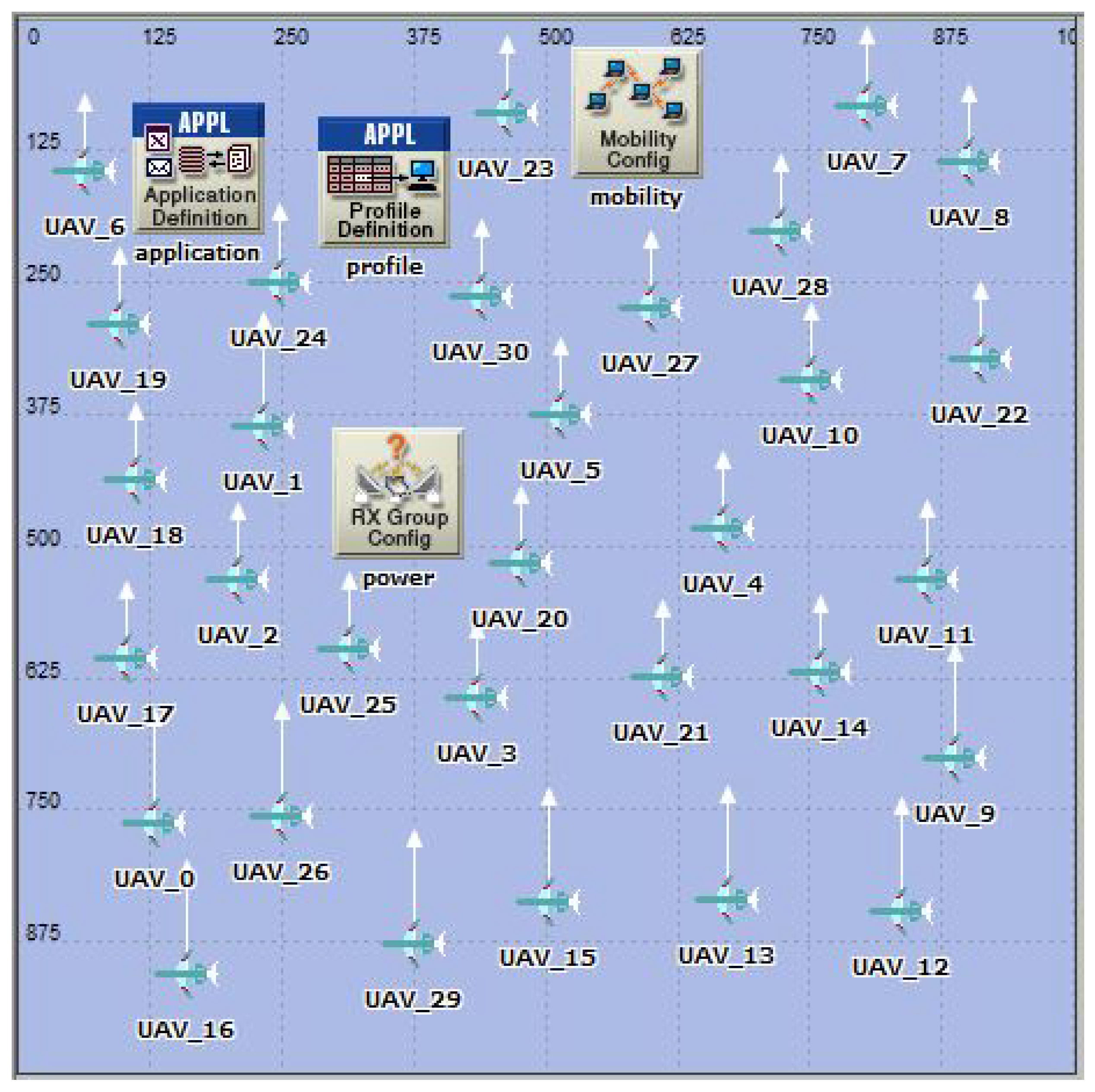
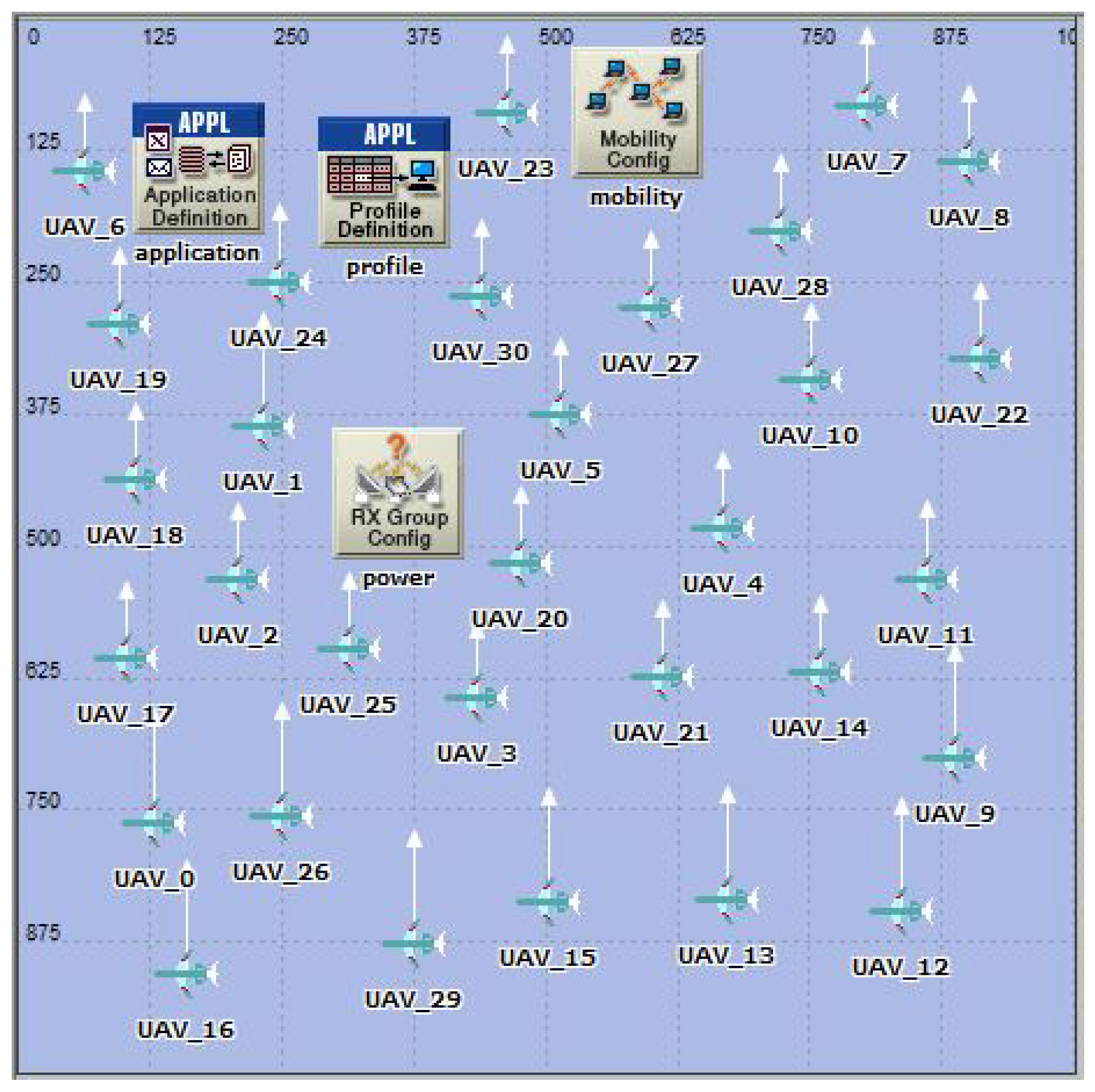
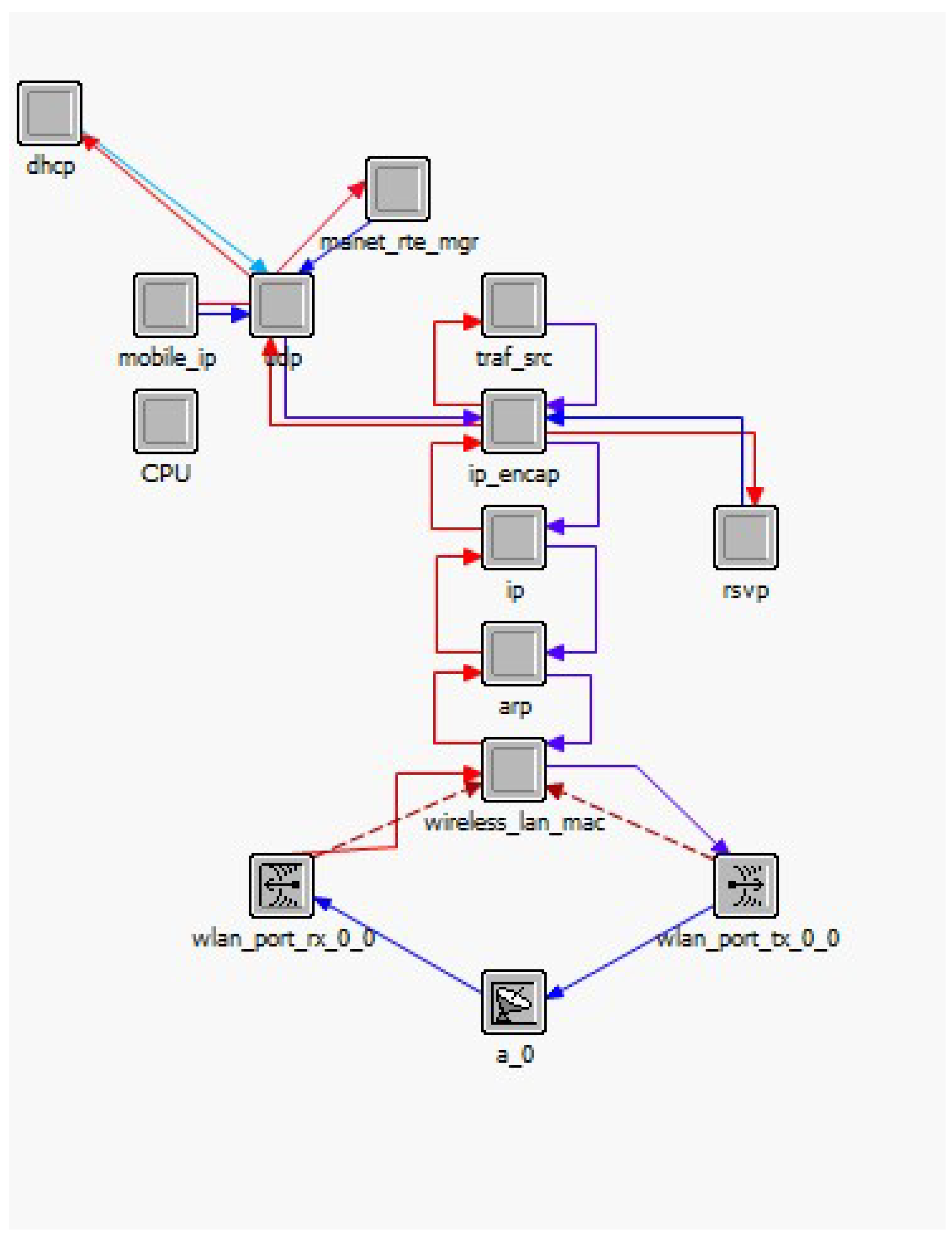
4. System Model and Simulation Setup
Simulation Setup
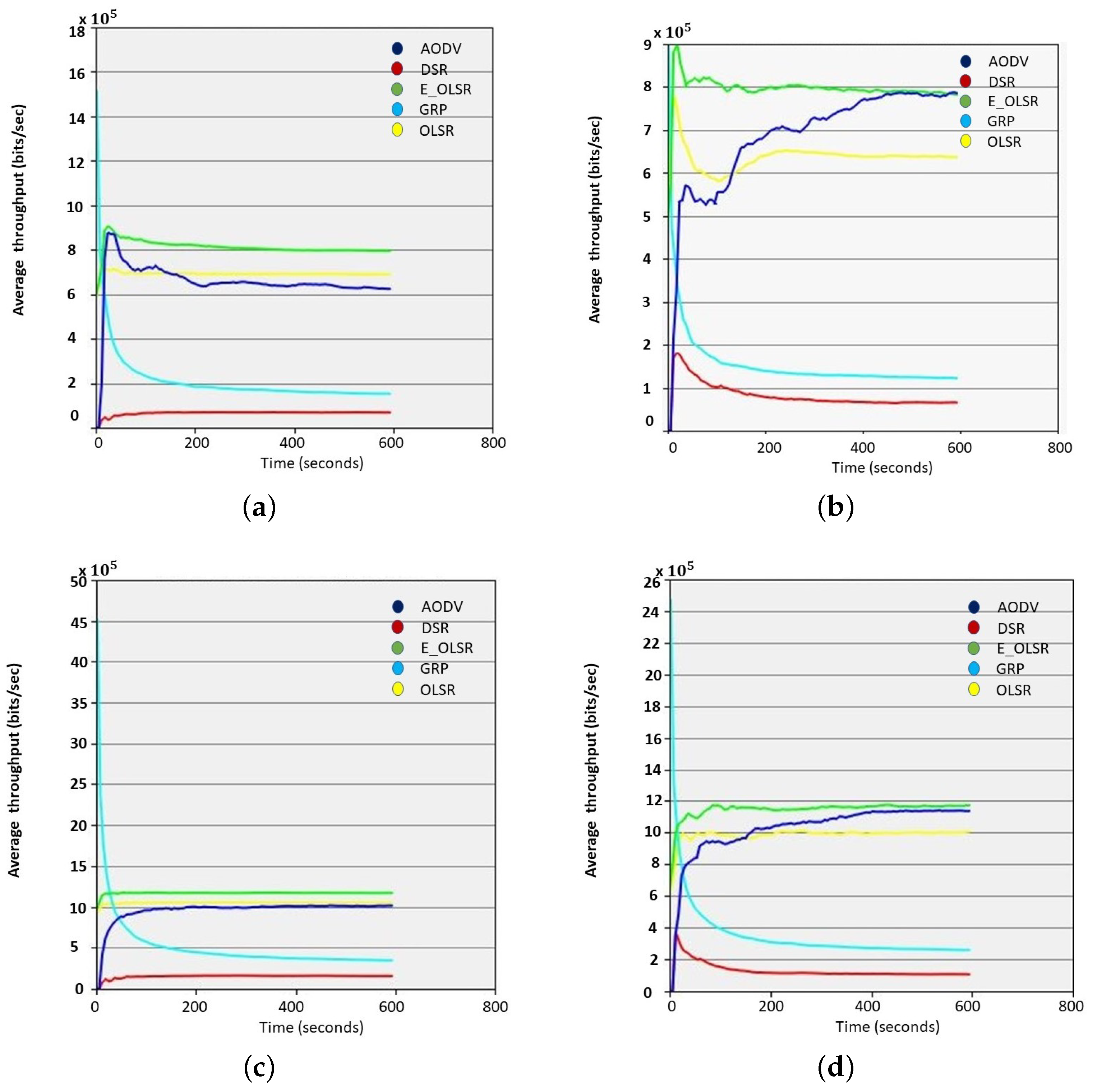
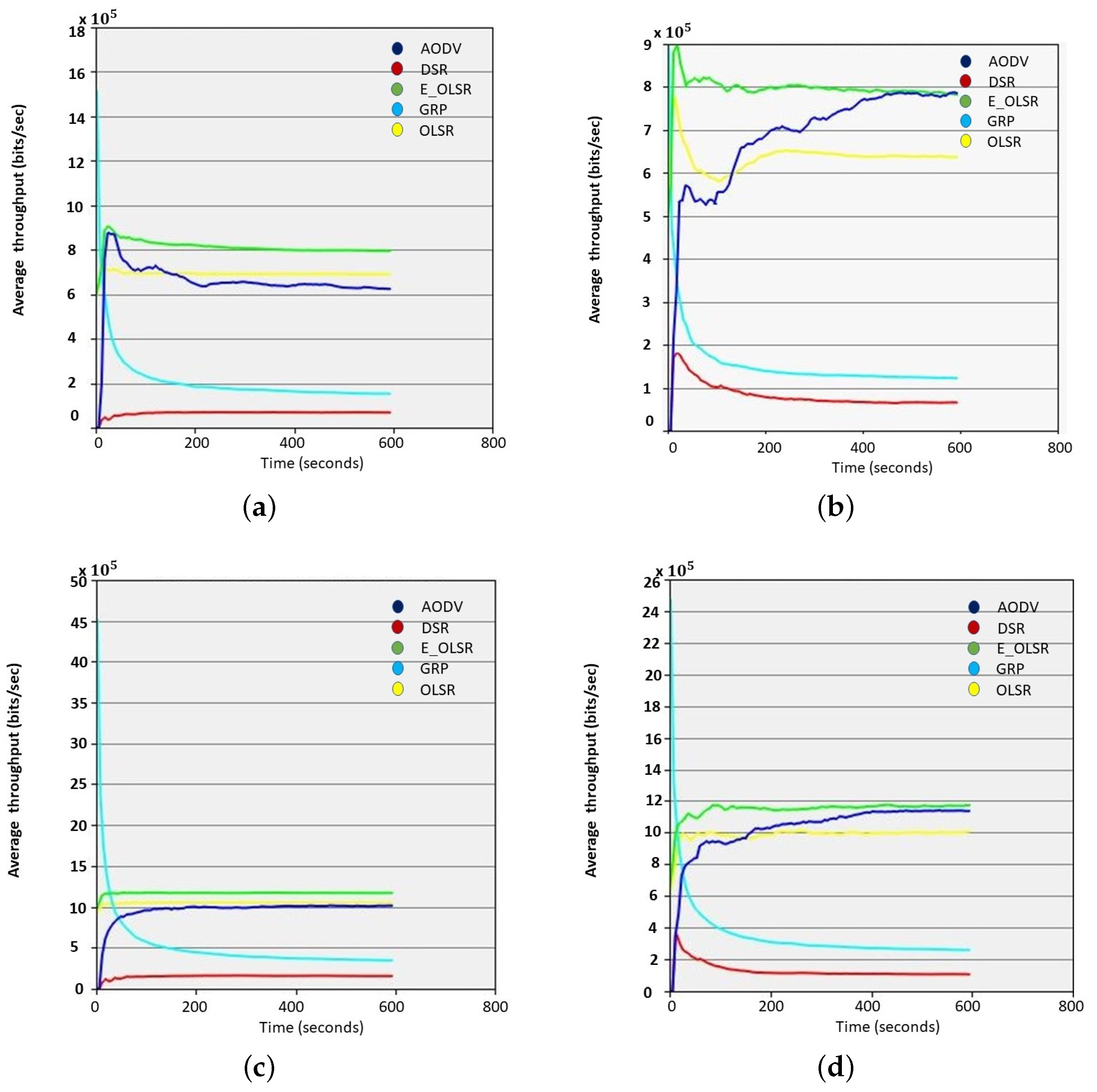
5. Results and Performance Analysis
5.1. Throughput
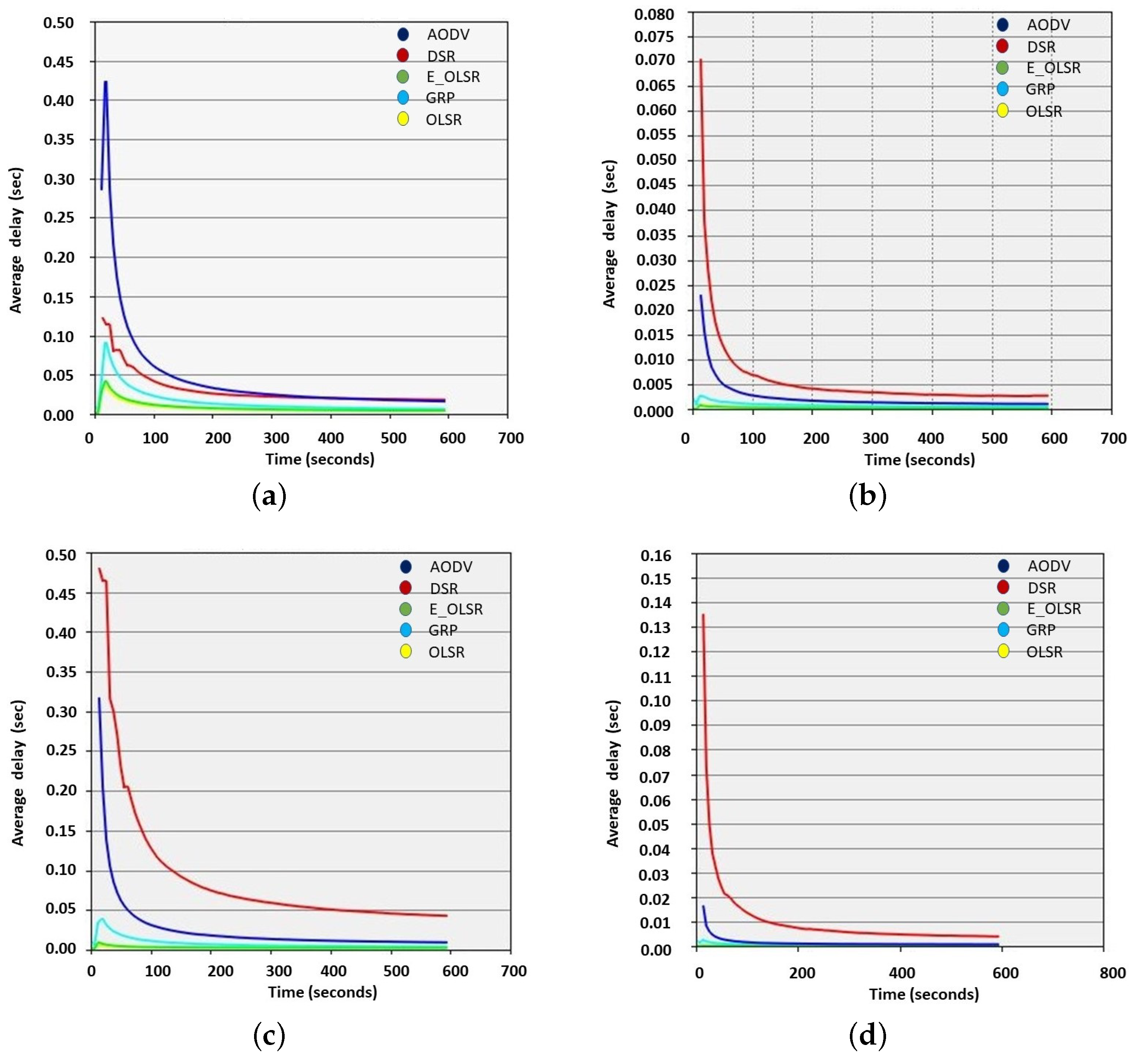
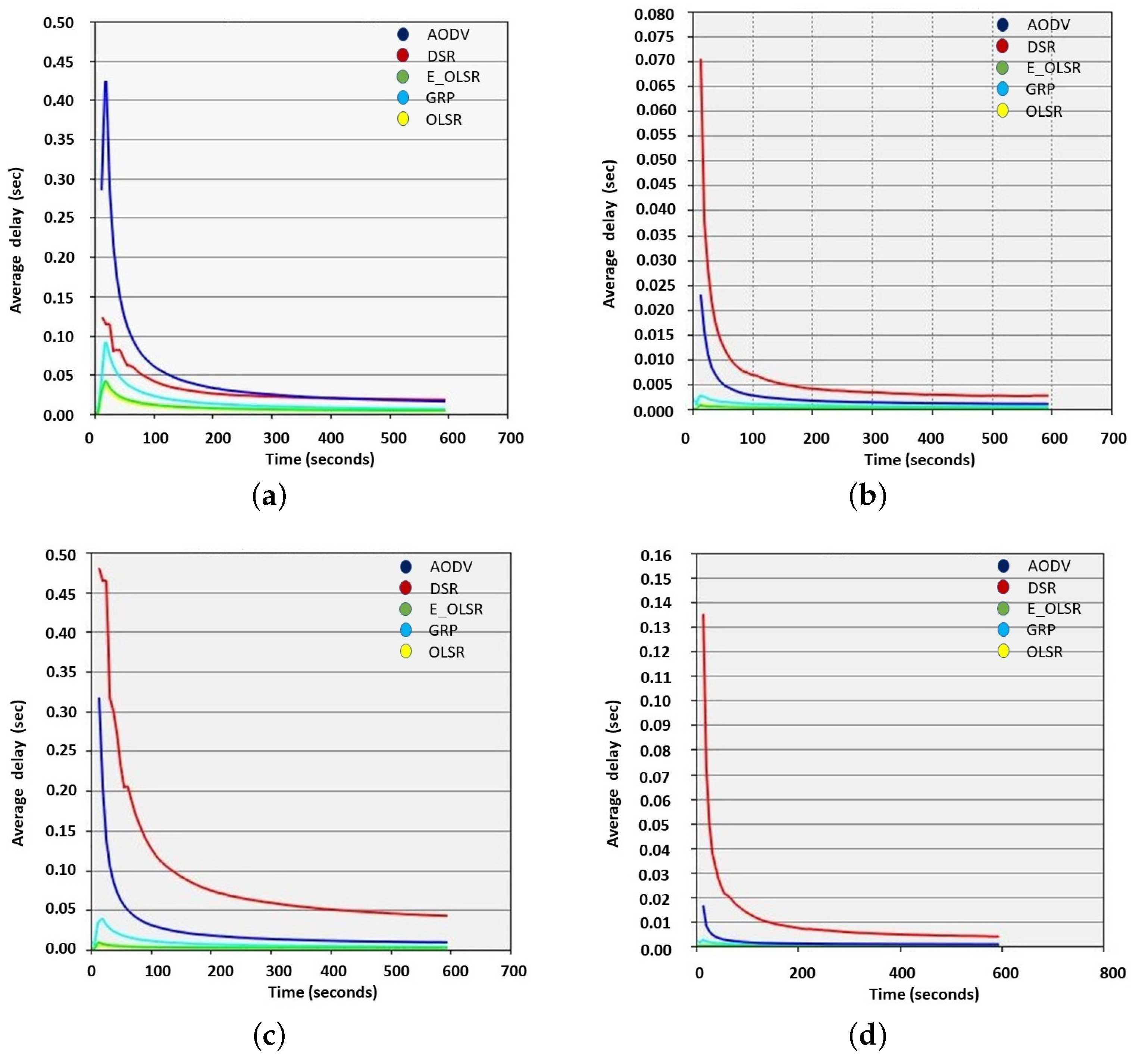
5.2. Delay
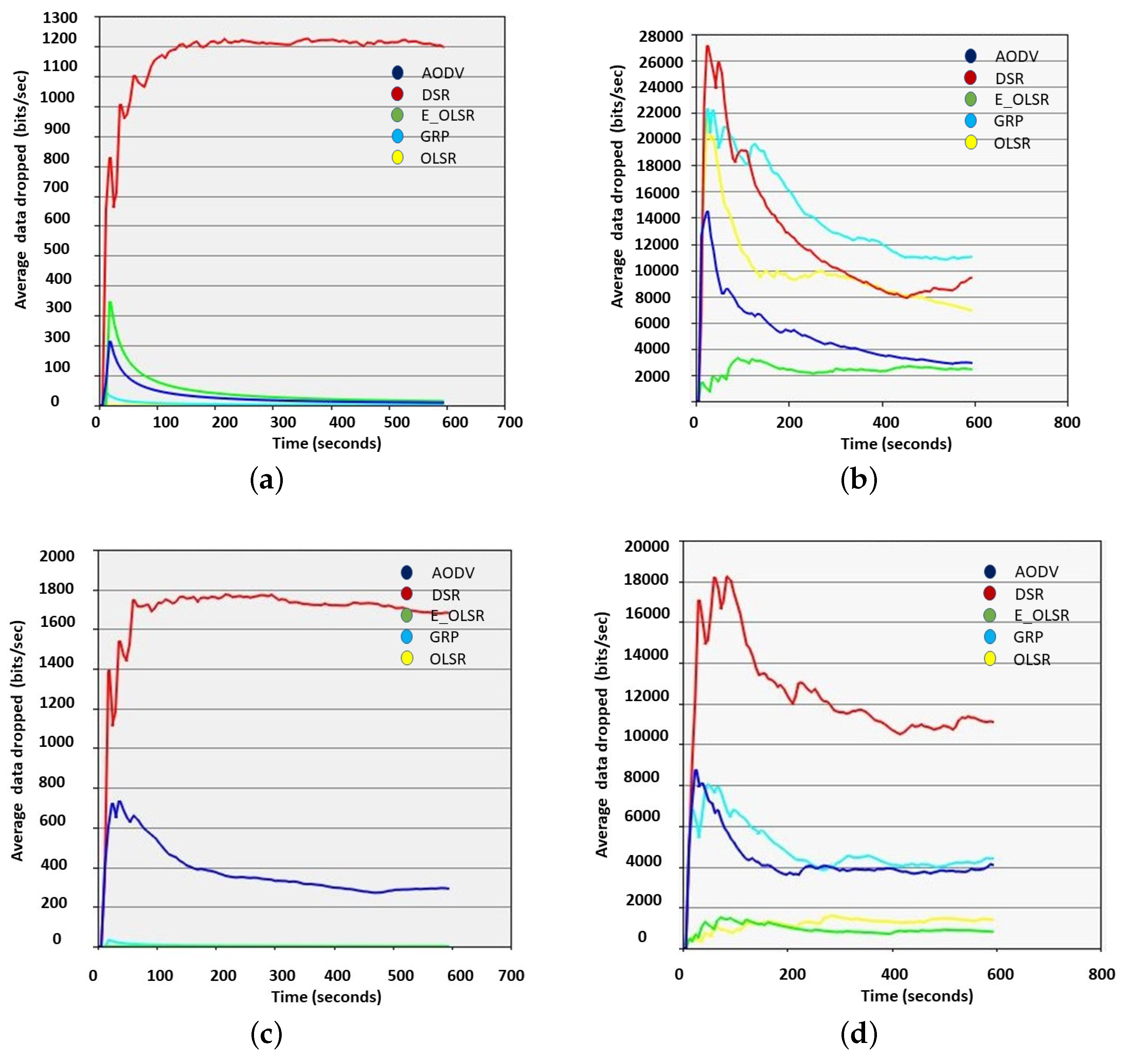
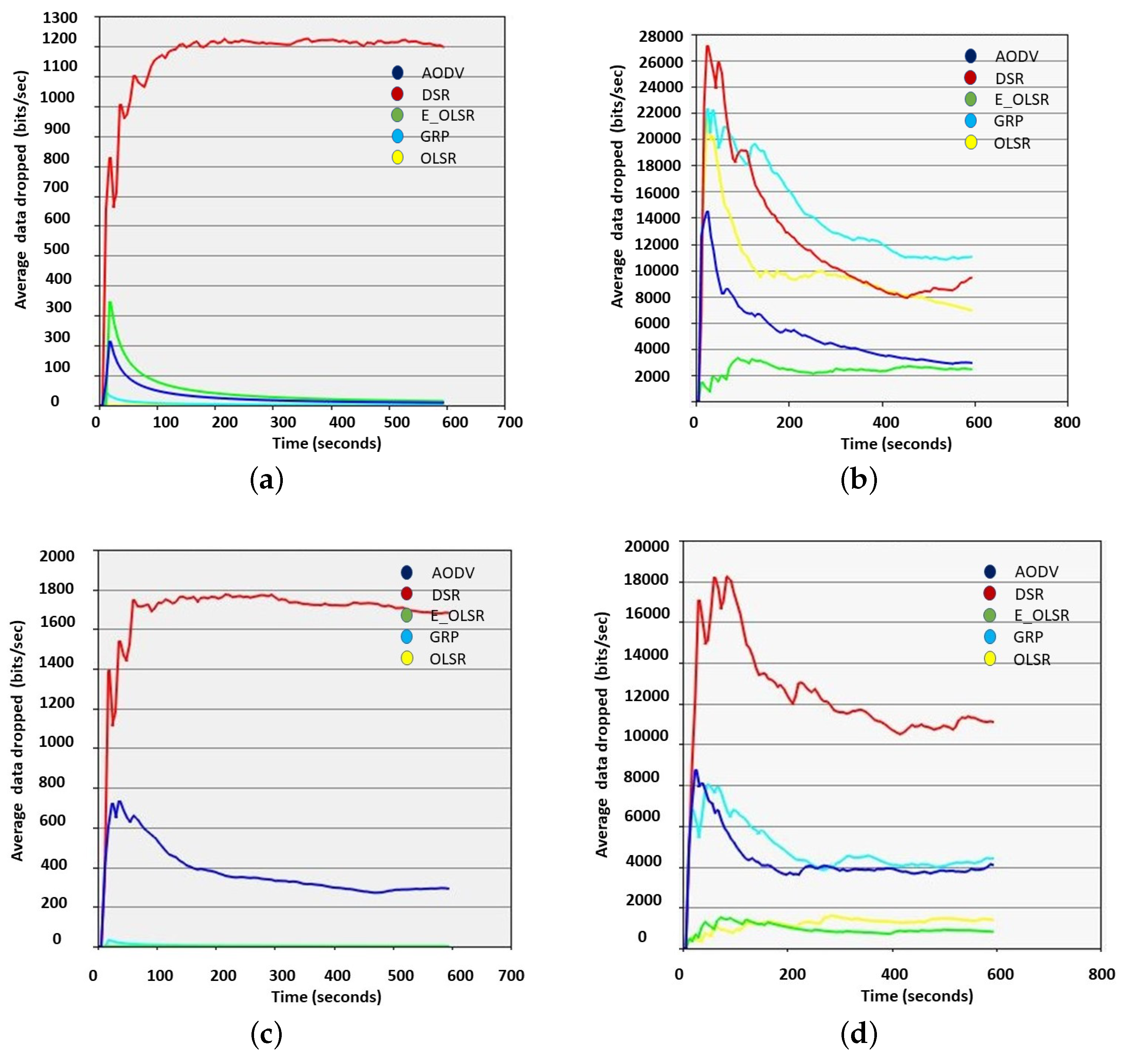
5.3. Data Drop Rate
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yue, X.; Liu, Y.; Wang, J.; Song, H.; Cao, H. Software defined radio and wireless acoustic networking for amateur drone surveillance. IEEE Commun. Mag. 2018, 56, 90–97. [Google Scholar] [CrossRef]
- Tuli, E.A.; Kim, D.S.; Lee, J.M. Performance Enhancement of UFMC Systems using Kaiser Window Filter. In Proceedings of the 2021 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 20–22 October 2021. [Google Scholar]
- Oliveira, H.C.; Guizilini, V.C.; Nunes, I.P.; Souza, J.R. Failure Detection in Row Crops From UAV Images Using Morphological Operators. IEEE Geosci. Remote Sens. Lett. 2018, 15, 991–995. [Google Scholar] [CrossRef]
- Rusyadi Ramli, M.; Lee, J.M.; Kim, D.S. Hybrid MAC Protocol for UAV-Assisted Data Gathering in a Wireless Sensor Network. Internet Things 2021, 14, 100088. [Google Scholar] [CrossRef]
- Bushnaq, O.M.; Chaaban, A.; Al-Naffouri, T.Y. The Role of UAV-IoT Networks in Future Wildfire Detection. IEEE Internet Things J. 2021, 8, 16984–16999. [Google Scholar] [CrossRef]
- Chen, D.Q.; Guo, X.H.; Huang, P.; Li, F.H. Safety Distance Analysis of 500kV Transmission Line Tower UAV Patrol Inspection. IEEE Lett. Electromag. Compat. Pract. Appl. 2020, 2, 124–128. [Google Scholar] [CrossRef]
- ur Rahman, S.; Kim, G.H.; Cho, Y.Z.; Khan, A. Positioning of UAVs for throughput maximization in software-defined disaster area UAV communication networks. J. Commun. Netw. 2018, 20, 452–463. [Google Scholar] [CrossRef]
- Shamsoshoara, A.; Afghah, F.; Blasch, E.; Ashdown, J.; Bennis, M. UAV-Assisted Communication in Remote Disaster Areas Using Imitation Learning. IEEE Open J. Commun. Soc. 2021, 2, 738–753. [Google Scholar] [CrossRef]
- Nassi, B.; Shabtai, A.; Masuoka, R.; Elovici, Y. Sok-security and privacy in the age of drones: Threats, challenges, solution mechanisms, and scientific gaps. arXiv 2019, arXiv:1903.05155. [Google Scholar]
- Coluccia, A.; Fascista, A.; Schumann, A.; Sommer, L.; Dimou, A.; Zarpalas, D.; Méndez, M.; de la Iglesia, D.; González, I.; Mercier, J.P.; et al. Drone vs. Bird Detection: Deep Learning Algorithms and Results from a Grand Challenge. Sensors 2021, 21, 2824. [Google Scholar] [CrossRef]
- Jamil, S.; Fawad; Rahman, M.; Ullah, A.; Badnava, S.; Forsat, M.; Mirjavadi, S.S. Malicious UAV Detection Using Integrated Audio and Visual Features for Public Safety Applications. Sensors 2020, 20, 3923. [Google Scholar] [CrossRef]
- Akter, R.; Doan, V.S.; Lee, J.M.; Kim, D.S. CNN-SSDI: Convolution neural network inspired surveillance system for UAVs detection and identification. Comput. Netw. 2021, 201, 108519. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Routing Protocols for Unmanned Aerial Vehicle Networks: A Survey. IEEE Access 2019, 7, 99694–99720. [Google Scholar] [CrossRef]
- İlker, B.; Sahingoz, O.K.; Şamil, T. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Singh, K.; Verma, A.K. A fuzzy-based trust model for flying ad hoc networks (FANETs). Int. J. Commun. Syst. 2018, 31, e3517. [Google Scholar] [CrossRef]
- Priyambodo, T.K.; Wijayanto, D.; Gitakarma, M.S. Performance Optimization of MANET Networks through Routing Protocol Analysis. Computers 2021, 10, 2. [Google Scholar] [CrossRef]
- Leonov, A.V.; Litvinov, G.A. Simulation-Based Performance Evaluation of AODV and OLSR Routing Protocols for Monitoring and SAR Operation Scenarios in FANET with Mini-Uavs. In Proceedings of the 2018 Dynamics of Systems, Mechanisms and Machines (Dynamics), Omsk, Russia, 13–15 November 2018; pp. 1–6. [Google Scholar]
- Hussen, H.R.; Choi, S.C.; Park, J.H.; Kim, J. Performance Analysis of MANET Routing Protocols for UAV Communications. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; pp. 70–72. [Google Scholar] [CrossRef]
- Kakamoukas, G.A.; Sarigiannidis, P.G.; Economides, A.A. FANETs in Agriculture-A routing protocol survey. Internet Things 2020, 2020, 100183. [Google Scholar] [CrossRef]
- Khan, I.U.; Qureshi, I.M.; Aziz, M.A.; Cheema, T.A.; Shah, S.B.H. Smart IoT control-based nature inspired energy efficient routing protocol for flying ad hoc network (FANET). IEEE Access 2020, 8, 56371–56378. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Yagoubi, M.B. A survey on position-based routing protocols for Flying Ad hoc Networks (FANETs). Vehicul. Commun. 2017, 10, 29–56. [Google Scholar] [CrossRef]
- Hong, J.; Zhang, D. TARCS: A topology change aware-based routing protocol choosing scheme of FANETs. Electronics 2019, 8, 274. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Khan, I.U.; Safi, A.; Quershi, I.M. Dynamic Routing in Flying Ad-Hoc Networks Using Topology-Based Routing Protocols. Drones 2018, 2, 27. [Google Scholar] [CrossRef] [Green Version]
- Jiang, J.; Han, G. Routing Protocols for Unmanned Aerial Vehicles. IEEE Commun. Mag. 2018, 56, 58–63. [Google Scholar] [CrossRef]
- Cheng, C.M.; Hsiao, P.H.; Kung, H.T.; Vlah, D. Maximizing Throughput of UAV-Relaying Networks with the Load-Carry-and-Deliver Paradigm. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 4417–4424. [Google Scholar] [CrossRef] [Green Version]
- Varshney, T.; Katiyar, A.; Sharma, P. Performance improvement of MANET under DSR protocol using swarm optimization. In Proceedings of the 2014 International Conference on Issues and Challenges in Intelligent Computing Techniques (ICICT), Ghaziabad, India, 7–8 February 2014; pp. 58–63. [Google Scholar] [CrossRef]
- Johnson, D.B.; Maltz, D.A. Dynamic source routing in ad hoc wireless networks. In Mobile Computing; Springer: Berlin/Heidelberg, Germany, 1996; pp. 153–181. [Google Scholar]
- Khare, V.R.; Wang, F.Z.; Wu, S.; Deng, Y.; Thompson, C. Ad-hoc network of unmanned aerial vehicle swarms for search amp; destroy tasks. In Proceedings of the 2008 4th International IEEE Conference Intelligent Systems, Varna, Bulgaria, 6–8 September 2008; Volume 1, pp. 6-65–6-72. [Google Scholar] [CrossRef]
- Moudni, H.; Er-rouidi, M.; Mouncif, H.; El Hadadi, B. Performance analysis of AODV routing protocol in MANET under the influence of routing attacks. In Proceedings of the 2016 International Conference on Electrical and Information Technologies (ICEIT), Tangiers, Morocco, 4–7 May 2016; pp. 536–542. [Google Scholar]
- Lyu, C.; Gu, D.; Zhang, X.; Sun, S.; Zhang, Y.; Pande, A. SGOR: Secure and scalable geographic opportunistic routing with received signal strength in WSNs. Comput. Commun. 2015, 59, 37–51. [Google Scholar] [CrossRef]
- Chen, X.; Tian, S.; Nguyen, K.; Sekiya, H. Decentralizing Private Blockchain-IoT Network with OLSR. Future Internet 2021, 13, 168. [Google Scholar] [CrossRef]
- Kumar, P.; Verma, S. Implementation of modified OLSR protocol in AANETs for UDP and TCP environment. J. King Saud Univ. Comput. Inform. Sci. 2019; in press. [Google Scholar] [CrossRef]
- Boushaba, A.; Benabbou, A.; Benabbou, R.; Zahi, A.; Oumsis, M. Multi-point relay selection strategies to reduce topology control traffic for OLSR protocol in MANETs. J. Netw. Comput. Appl. 2015, 53, 91–102. [Google Scholar] [CrossRef]
- De Rango, F.; Fotino, M.; Marano, S. EE-OLSR: Energy Efficient OLSR routing protocol for Mobile ad-hoc Networks. In Proceedings of the MILCOM 2008—2008 IEEE Military Communications Conference, San Diego, CA, USA, 16–19 November 2008; pp. 1–7. [Google Scholar] [CrossRef]
- Barki, O.; Guennoun, Z.; Addaim, A. Improving the selection of MPRs in OLSR protocol: A survey of methods and techniques. Int. J. Electr. Comput. Eng. 2020, 10, 288. [Google Scholar] [CrossRef]
- Toutouh, J.; Garcia-Nieto, J.; Alba, E. Intelligent OLSR Routing Protocol Optimization for VANETs. IEEE Trans. Vehicul. Technol. 2012, 61, 1884–1894. [Google Scholar] [CrossRef] [Green Version]
- Clausen, T.; Jacquet, P. RFC3626: Optimized Link State Routing Protocol (OLSR). 2003. Available online: https://dl.acm.org/doi/pdf/10.17487/RFC3626 (accessed on 8 May 2021).
- Mohammed, F.; Jawhar, I.; Mohamed, N.; Idries, A. Towards Trusted and Efficient UAV-Based Communication. In Proceedings of the 2016 IEEE 2nd International Conference on Big Data Security on Cloud (BigDataSecurity), IEEE International Conference on High Performance and Smart Computing (HPSC), and IEEE International Conference on Intelligent Data and Security (IDS), New York, NY, USA, 9–10 April 2016; pp. 388–393. [Google Scholar] [CrossRef]
- De Couto, D.S.; Aguayo, D.; Bicket, J.; Morris, R. A high-throughput path metric for multi-hop wireless routing. ACM Mobicom 2003, 3, 134–146. [Google Scholar] [CrossRef] [Green Version]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Lagraa, N.; Yagoubi, M.B. Intelligent UAV-assisted routing protocol for urban VANETs. Comput. Commun. 2017, 107, 93–111. [Google Scholar] [CrossRef]
- AlShahwan, F.; Alshamrani, M.; Amer, A.A. Dynamic Novel Cross-Layer Performance Enhancement Approach for SIP over OLSR. IEEE Access 2018, 6, 71947–71964. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Standard Value | Range |
|---|---|---|
| Willingness | WILL_DEFAULT(3) | [0, 7] |
| HELLO_INTERVAL | 2 s | [1.0, 30.0] |
| TC_INTERVAL | 5 s | [1.0, 30.0] |
| NEIGHB_HOLD_TIME | 3 × REFRESH_INTERVAL | [3.0, 100.0] |
| TOP_HOLD_TIME | 3 × TC_INTERVAL | [3.0, 100.0] |
| DUP_HOLD_TIME | 30 s | [3.0, 100.0] |
| Parameters | DSR | AODV | GRP | OLSR | E-OLSR |
|---|---|---|---|---|---|
| Protocol type | On-demand | On-demand | Proactive | Proactive | Proactive |
| Multiple route | Yes | No | Yes | No | No |
| Routing overhead | Low | High | Medium | Medium | Medium |
| Route maintains | Route cache | Route table | Route table | Route table | Route table |
| Route structure | Flat structure | Flat structure | Flat structure | Flat structure | Flat structure |
| Route metric | Shortest path | Shortest path | Shortest path | Shortest distance | Shortest distance |
| Congestion | Low | Medium | Medium | Medium | Medium |
| Hop counts | Very high | Normal | High | Less | Less then OLSR |
| Parameter | Value |
|---|---|
| Simulation area | 1000 m × 10,000 m |
| Number of UAVs | 30 and 50 |
| Directional Gain | 10 dBi |
| Node type | Mobile |
| Mobility model | Random waypoint |
| Altitude | 200 m and 50 m |
| UAV max speed | 40 m /s and 30 m /s |
| Routing protocols | E-OLSR, OLSR, DSR, GRP and AODV |
| Physical characteristics | Extended rate PHY (802.11 g) |
| Data rate | 1 Mbps to 24 Mbps |
| Transmit power | 0.005 W |
| Simulation duration | 10 min |
| Simulation seed | 128 |
| IP addressing | Auto-assign IPv4 addressing |
| Packet interval | Exponential (1) s |
| Reception Power Threshold | −95 dBm |
| Packet size | 1024 byte |
| Large packet processing | Drop (if bigger then 2304 bytes) |
| Buffer size | 256,000 bits |
| AP beacon interval | 0.02 s |
| Secnario Name | UAVs | Altitude | Speed | Data Rate |
|---|---|---|---|---|
| Scenario 1 | 30 | 200 m | 40 m /s | 1 Mbps |
| Scenario 2 | 30 | 200 m | 40 m /s | 24 Mbps |
| Scenario 3 | 50 | 50 m | 30 m /s | 1 Mbps |
| Scenario 4 | 50 | 50 m | 30 m /s | 24 Mbps |
| Scenario | Performance Metrics | AODV | DSR | E-OLSR | GRP | OLSR |
|---|---|---|---|---|---|---|
| Scenario 1 | Throughput (bits/s) | 703,987 | 14,138 | 807,018 | 214,578 | 682,993 |
| Delay (s) | 0.04603 | 0.03709 | 0.01643 | 0.02034 | 0.00112 | |
| Data Drop Rate (bits/s) | 66.10 | 185.27 | 19.60 | 12.38 | 25.16 | |
| Scenario 2 | Throughput (bits/s) | 618,075 | 10,409 | 791,997 | 178,115 | 682,993 |
| Delay (s) | 0.00196 | 0.00358 | 0.00075 | 0.00245 | 0.00112 | |
| Data Drop Rate (bits/s) | 3021.12 | 6047.16 | 2993.20 | 5135.21 | 3385.23 | |
| Scenario 3 | Throughput (bits/s) | 976,093 | 15,409 | 1,164,725 | 352,092 | 1,046,432 |
| Delay (s) | 0.0129 | 0.0376 | 0.0022 | 0.0033 | 0.0024 | |
| Data Drop Rate (bits/s) | 366.77 | 1737.6 | 0.43 | 0.76 | 0.58 | |
| Scenario 4 | Throughput (bits/s) | 1,107,482 | 136,878 | 1,141,475 | 347,206 | 1,030,007 |
| Delay (s) | 0.00202 | 0.01074 | 0.00019 | 0.00773 | 0.00036 | |
| Data Drop Rate (bits/s) | 4350.93 | 10,602.72 | 760.71 | 302.96 | 1570.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tuli, E.A.; Golam, M.; Kim, D.-S.; Lee, J.-M. Performance Enhancement of Optimized Link State Routing Protocol by Parameter Configuration for UANET. Drones 2022, 6, 22. https://doi.org/10.3390/drones6010022
Tuli EA, Golam M, Kim D-S, Lee J-M. Performance Enhancement of Optimized Link State Routing Protocol by Parameter Configuration for UANET. Drones. 2022; 6(1):22. https://doi.org/10.3390/drones6010022
Chicago/Turabian StyleTuli, Esmot Ara, Mohtasin Golam, Dong-Seong Kim, and Jae-Min Lee. 2022. "Performance Enhancement of Optimized Link State Routing Protocol by Parameter Configuration for UANET" Drones 6, no. 1: 22. https://doi.org/10.3390/drones6010022
APA StyleTuli, E. A., Golam, M., Kim, D.-S., & Lee, J.-M. (2022). Performance Enhancement of Optimized Link State Routing Protocol by Parameter Configuration for UANET. Drones, 6(1), 22. https://doi.org/10.3390/drones6010022