Abstract
The continual expansion of the range of applications for unmanned aerial vehicles (UAVs) is resulting in the development of more and more sophisticated systems. The greater the complexity of the UAV, the greater the likelihood that a component will fail. Due to the fact that drones often operate in close proximity to humans, the reliability of flying robots, which directly affects the level of safety, is becoming more important. This review article presents recent research works on fault detection on unmanned flying systems. They include papers published between January 2016 and August 2022. Web of Science and Google Scholar databases were used to search for articles. Terminology related to fault detection of unmanned aerial vehicles was used as keywords. The articles were analyzed, each paper was briefly summarized and the most important details concerning each of the described articles were summarized in the table.
1. Introduction
With each subsequent year, the number of unmanned aerial vehicles (UAVs) and their applications is expanding [1,2,3,4]. Shakhatreh et al. in their extensive study [5] list areas where UAVs are used: infrastructure, agriculture, transportation, security, media & entertainment, insurance, telecommunications, and mining. They also enumerate specific applications in which UAVs make a contribution: search and rescue [6,7,8,9], remote sensing [10,11,12], construction and infrastructure inspections [13,14,15], and precision agriculture [16,17,18]. There is a growing level of technological advancement in the areas of sensors [19,20,21], generated computing power [22], materials, as well as in the area of aggregation and data processing during the flight [23]. Reliability and a high level of safety are required for autonomously controlled flying robots—especially in transport and entertainment applications. New techniques of sensory data fusion, fault detection, fault-tolerant estimation and fault-tolerant control come to the rescue. This article is an attempt to systematize the state-of-the-art in terms of the fault detection method, since, as it will be shown, there are many standards, areas, nomenclature and approaches to this area of research.
Fault detection (FD) is the first step in a larger process called fault detection and diagnosis (FDD). Most often, the entire fault diagnosis process is divided into three stages [24,25,26,27]. Consistent terminology for the different stages of the FDD was first proposed by Isermann and Ballé in [28] after consultations with the SAFEPROCESS Technical Committee. Subsequently, the nomenclature was reproduced in [29,30]. The individual steps along with the most important features are presented in Figure 1. For explanations of fault diagnosis terms, see Appendix A.
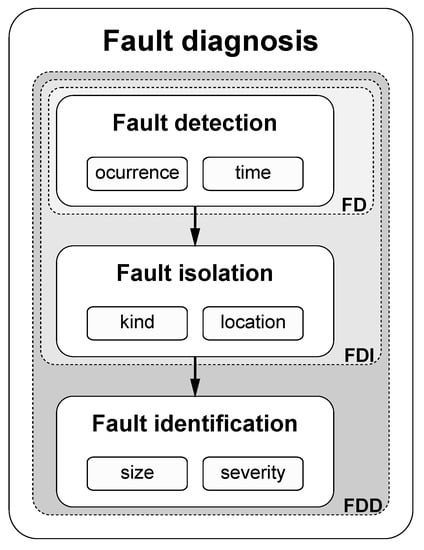
Figure 1.
Fault diagnosis steps.
In the present paper, we aim to use more specific results of individual studies with an indication of strengths and weaknesses. We present the method of conducting the experiment, with particular emphasis on whether it occurred place in real conditions, in a laboratory, or only simulation tests were carried out. Specific UAV models used in the research were also indicated, as long as the authors openly present them.
Table 1 shows a popular breakdown of fault detection methods. Vural et al. in [31] list two types of these methods: model-based and data-driven. This is the most common, but not the only, way to distinguish between these methods. Iserman in their book [30] describes the methods of detection and diagnosis of failures with knowledge-based, signal-based and process-model-based. Amorim divides fault detection methods into those based on single signal and multiple signals and models [32]. In turn, Făgărăşan et al. in [33] divide these methods into signal-based and process-based.

Table 1.
Division of fault detection methods.
The same applies to the division of the types of unmanned aerial vehicles. It can be done by taking into account various criteria. In this paper, in Figure 2, we propose a simple division of the UAV due to the type of construction into rotary wing, tilt-rotor, fixed wing, and flapping wing.
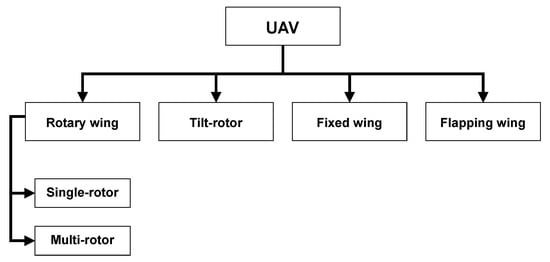
Figure 2.
Types of UAVs.
The main contribution of this study is: the compilation of the most effective, currently developed methods of fault detection to drone systems in one place, showing structures in which specific methods can be used, and methods of testing. Still, many methods are tested only by simulation. The manner of verification has a significant impact on the obtained results. All the more valuable is the selection of those studies in which the tests were carried out during actual flights.
Faults in UAVs are usually divided into two categories: actuator faults and sensor faults. Although there are studies treating, for example, damage to circuit boards [34], drone’s frame [35] or the surface of the flying vehicle itself [36], these are not often addressed research problems by scientists. Figure 3 presents a common division into two main groups. Within each group, it indicates the most common types of faults. In turn, Figure 4 and Figure 5 illustrate pseudo signal timelines presenting individual actuator and sensor faults.
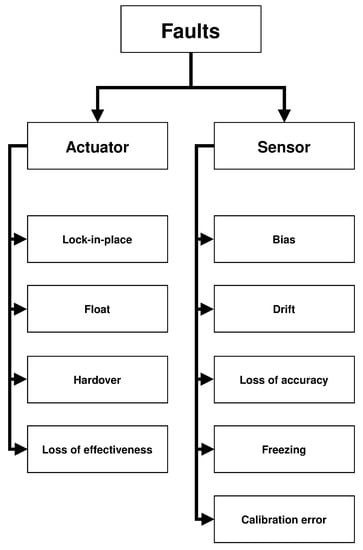
Figure 3.
Types of faults (based on [37,38]).
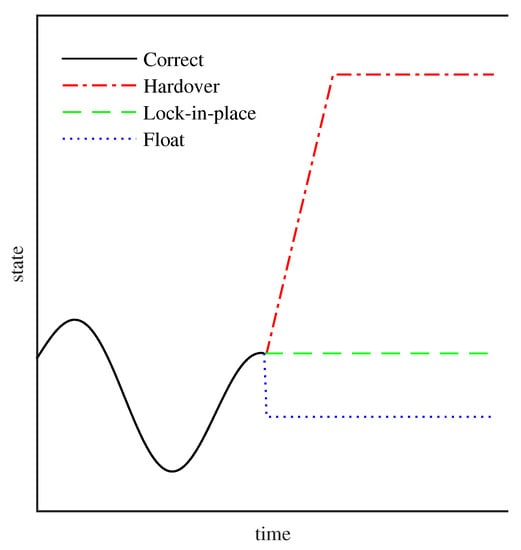
Figure 4.
Common actuator faults (based on [37,38]).
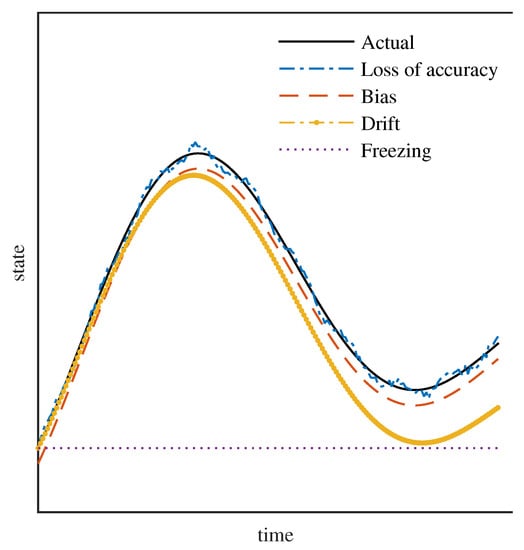
Figure 5.
Common sensor faults (based on [37,38]).
Figure 6, Figure 7, Figure 8 and Figure 9 show examples of popular types of UAV structures. In turn, Figure 10 presents different types of multirotor propeller arrangements, including rare ones. The arrows around the rotors represent the propeller rotation direction. Where there are two arrows placed coaxially, two rotors are placed. E.g. a quadcopter in a quad Y design has two rotors placed on the rear arm.

Figure 6.
Quadrotor UAV structure [39].
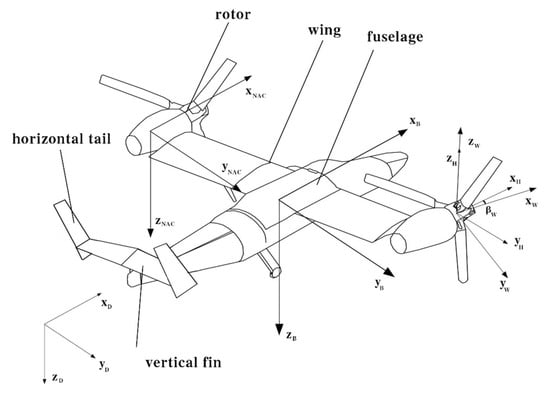
Figure 7.
Tilt-rotor UAV structure [40].
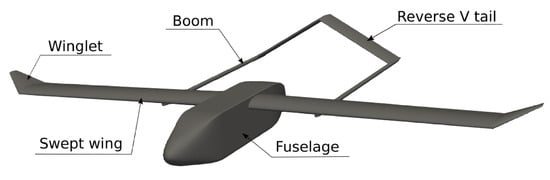
Figure 8.
Fixed wing UAV structure [41].
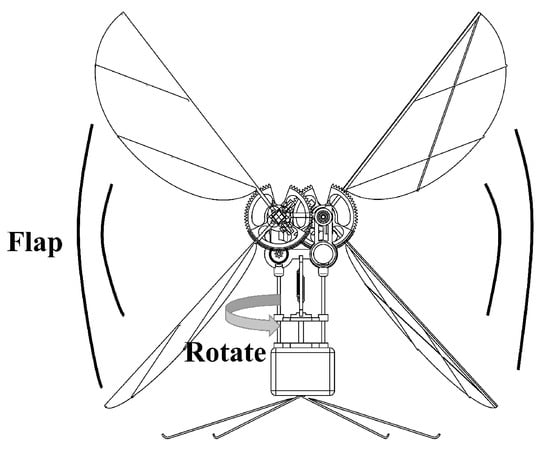
Figure 9.
Flapping wing UAV structure [42].
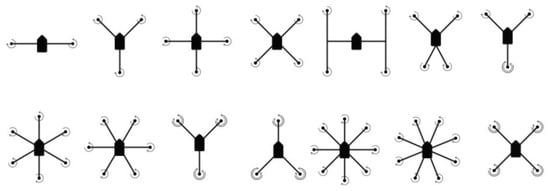
Figure 10.
Types of multirotor propeller arrangements [43]. In the top row are, in order from left: bicopter, tricopter, quad +, quad X, quad H, quad V, quad Y. In the bottom row are, in order from left:: hexa +, hexa X, hexa Y6, hexa IY, octo +, octo X, octo X8.
The rest of the paper is organized as follows: Section 2 presents the search procedure for existing review articles and regular research papers. A short description of reviews and surveys published in recent years is included in Section 3. Section 4 consists of the most important information from articles and conference papers describing the current state of knowledge in the field of UAV fault detection. The work carried out is summarized in Section 5. Finally, Section 6 concludes the paper.
2. Search Procedure
All information presented in the next sections of the paper was gathered, analyzed, and compared mostly based on two main databases, for which the search procedure from Table 2 is used. Surveys were searched on the Google Scholar database, which allows one to select review articles in the search preferences. However, this option proved to be unreliable. Therefore, the words “survey” and “review” were added to the search terms. Regular research papers were searched mainly in the Web of Science database, which allows for a precise selection of keywords and logical relationships between them. Then, the found results were supplemented with articles from Google Scholar. All searches were performed in the time range from 1 January 2016 to 31 August 2022.
Table 2.
Search procedure for surveys and regular papers.
3. Existing Surveys and Reviews
The state-of-the-art can be presented as a survey or literature review.
The survey article presents the knowledge and achievements of a given theory, concept or technique from the beginning to the present state. It aims to summarize its evolution. Focuses on collecting and presenting information, usually to describe the progress of discoveries about it [44].
A literature review also includes the collection of the extensive literature on a given topic. However, unlike the survey article, it additionally compares different studies based on shared metadata. It draws conclusions from them, describes strengths and weaknesses, and proposes future directions. The literature review is therefore usually longer than the survey article [44].
Several valuable review articles have been written in recent years presenting different areas of fault detection in unmanned aerial vehicles. Table 3 briefly presents the topics discussed.
Table 3.
Existing surveys and reviews.
In the survey on quadrotors [45], the authors conducted a comprehensive review of quadrotor UAVs. They describe various configurations and the division of state-of-art into multiple linear and nonlinear control methods. They present papers on model identification, state estimation, and collision avoidance systems as well as fault diagnosis and fault-tolerant control. There is an added value in examining the selected controllers with a certain significant trajectory proposed by the authors. In this way, various quality indicators were compared during the movement along the assumed flight route and disturbances in each of the three axes. This review analyzed articles from the year 1988 to 2016.
In [46], the principles of operation of the Kalman filter are presented. Theoretical assumptions and practical applications of extended, unscented, robust, and adaptive Kalman filters are described. In particular, the focus was on the use of filters for identification, sensory data fusion, state estimation, fault detection, and fault-tolerant control for unmanned aerial vehicles. The studies from the years 1998-2020 were analyzed.
The authors of [47] present a fairly broad approach to the subject of multisource interference, faults and failures described in the studies from 1976 to 2019. They present the characteristics of various disorders, their estimation and detection, as well as methods of counteracting and minimizing the effects of this type of irregularities, including mission reconfiguration techniques. They also described the general principles of designing a UAV safe control system.
An extensive review of the fault diagnosis and fault-tolerant control methods is presented by Fourlas et al. [48]. It shows the division of the UAV into wing type, fault detection and isolation (FDI) method, fault-tolerant control (FTC) type and anomaly detection techniques. The paper reviews techniques for detecting sensor faults, actuators, and anomalies in the operation of various UAV systems. It also shows fault-tolerant control methods. The review covers works from 2010 to 2021.
In addition to review articles directly dealing with the issue of fault detection, it is also worth mentioning the works on the practical applications of unmanned aerial vehicles. One such paper is [49], which broadly describes the subject of UAV-supported forest regeneration. The authors, based on over 200 texts (reviewed and non-reviewed), introduce the benefits of using unmanned flying robots in afforestation and reforestation tasks. They show the impact of using artificial intelligence and flying machines in accelerating the process of forest reconstruction and monitoring their condition. They present the benefits obtained from the use of modern technologies by organizations in many places around the world. At the same time, they indicate the dangers related to, for example, the interaction of UAVs with wildlife, e.g., with birds living on terrains where drones are used. They will also point out that despite the undisputed profits, the use of unmanned aerial vehicles should complement traditional afforestation methods, and not completely replace them.
Another paper treating the use of UAVs extensively is [50]. This review article describes the use of drones in a resource-rich country. The authors point out the wide range of possibilities for the use of UAVs in monitoring tasks, communications, search, cargo delivery or field processing. Using Kazakhstan as an example, the economic benefits of solving exemplary problems with UAVs are shown: precision agriculture, exploration of minerals, monitoring of animals, traffic, environmental pollution, hazardous geophysical processes, and technical and engineering structures. The main tasks of precision agriculture are to collect information about the farm, field culture, and region, analyze the information gathered, and implement appropriate agro-technological events. A UAV equipped with a multispectral camera, global positioning system (GPS), a humidity sensor, and a barometer is able to clearly support the process of collecting information and for further processing in order to take appropriate measures to support agriculture. Similarly, the drone’s capabilities for monitoring environmental pollution or wild animal life. In turn, the possibility of 3D mapping and modeling supports mineral exploration processes. UAVs provide tremendous assistance in the field of early warning of catastrophes or natural disasters and monitoring engineering structures. An invaluable advantage is a possibility to explore dangerous or simply inaccessible places. In the event of a hazardous situation, these machines help to estimate the level of destruction, search for the injured and provide assistance. Drones can deliver, for example, small packages containing first-aid kits or other survival supplies. The article also did not lack an analysis of the limitations that characterize flying robots. The authors divided them into three groups: technical, legal, and software-algorithmic. In the first group, sensor sensitivity, dependence on weather payload, and limited battery capacity, which affects flight time, were mainly pointed out. The second group included bans on flying in specific areas and restrictions on safe distances from people and vehicles. Software and algorithmic constraints, on the other hand, relate to the volume and heterogeneity of the data acquired, their incompleteness, multi-dimensional, and high resolution. These all limit the possibilities of processing them directly on board.
There are also many studies available treating not directly unmanned aerial vehicles, but methods and techniques to support their successful applications. An example of this is [51], which is a survey on machine vision. The article addresses the topics of machine learning and artificial neural network in image processing. The authors note that by using multispectral, thermal, and visible cameras in UAVs, it is possible to analyze soil characteristics, inspect crops to predict yields, detect diseases, and decide when to irrigate and harvest crops.
In turn, [52] addresses the problem of change detection techniques for land monitoring. The authors describe approaches based on neural networks using satellite and drone images. The article presents methods for classifying bare land, dense vegetation, and sparse vegetation using satellite data supported by high-resolution images from UAV cameras. The problem described can be useful in both agriculture and troop movement planning.
4. Regular Research Papers
The current section presents a study of various UAV fault detection methods. The tables list the year of publication, the anomaly or disturbance to be detected, and the method used. It is also indicated to which types of vehicles the authors of each study dedicate their solution. An important part of each paper is also how the effectiveness of the proposed approach was verified. Thus, it is specified whether the tests were carried out only by simulation or during a real flight in the laboratory, or in real conditions. The specific model of the UAV is also given if the authors provided such information. Of course, other attributes and parameters were also taken into account, but the ones listed above were considered the most important for a researcher reading this review to quickly find relevant information.
4.1. Model-Based Methods
Still the most popular way to detect malfunctions of unmanned flying robots is to use methods that are based on a model of the system. They are a group of methods belonging to the category of analytical (computational) redundancy using a mathematical model [48]. They include quantitative (state/parameter estimation, parity space) and qualitative methods (causal models, abstraction hierarchy) [53]. Abbaspour et al. [54], in turn, divides them into linear and nonlinear categories. Among the most popular are mainly Kalman filters with their modifications and extensions [34]. Table 4 summarizes publications on UAV fault detection that use model-based methods. It lists what types of malfunctions and disturbances are diagnosed and the exact method used. It is also indicated for which drone designs the method was developed/researched and how the tests were conducted. A brief description of each work presented is included in the table below.
Table 4.
Research works using model-based methods.
Fazal et al. [55] offer fault-tolerant control for three different types of actuator faults. Their system consists of FDI using full-state observers and based on the Eigenstructure Assignment method. Fault detection is performed using sequential probability ratio test (SPRT). Then the reconfiguration stage is carried out, and the effectiveness of the FTC is checked in the Simulink simulator.
The authors of the article [56] present a novel sensor fusion design framework. They use the Unscented Information Filter to build an FDI system that detects faults in inertial sensors, magnetometer, and GPS receiver. They have prepared a three-step sensor fusion design framework, which: fuses sensory data in various combinations of sensor pairs, refines the sensor error model, and reconfigures the measurement system. Describe offline and online sensors calibration process and perform tests on WVU YF-22 aircraft.
The sensor FDI method, sensitive to the changes in the mean and covariance of the Kalman filter, is proposed by Hajiyev in [57]. The proposed solution is based on multiple measurement noise scale factors and allows for the detection and isolation of sensor faults. Two types of mulfunctions have been distinguished: continuous bias and measurement noise increment. The proposed multiple measurement noise scale factors (MMNSFs) were applied for the model of dynamics of a UAV and were used for monitoring statistics. The optimum linear Kalman filter estimates the state vector of the system. As the main advantage—as in the later work on actuator/surface faults detection [71]—the author indicates the simultaneous detection and isolation of faults. However, the proposed solution is not suitable for identifying the type of faulted sensor. Tests were carried out on the fixed wing ZAGI UAV model with the pitch rate of gyroscope as an example of noise-prone sensor readings.
Herdjunanto in [58] proposes detection filter to solve actuator fault signal isolation in hovering motion of the quadrotor UAV. The big advantage of such a solution is the ability to handle many types of fault signals without adjusting the filter parameters. In the article, the author focuses primarily on the theory of detection filter, the mathematical model of the quadrotor, detection space dimension for UAV’s hovering motion, and detection filter gain. The simulation is carried out on the assumption that fault signals are present on the first and second actuators. The fault signal of the first actuator is a stepping function and the fault signal of the second actuator is a sinusoidal function. The addition of the virtual actuator vector fulfills the mutual detection requirement of the hovering quadrotor, and by detection of the filter gain, decoupled detection spaces can be obtained.
Liu et al. [59] present unscented Kalman filter (UKF)-based fault detection and isolation for a ducted fan UAV. This type of drone consists of two main tandem contra-rotating ducted fans, two auxiliary ducted fans and two control vanes sets. The proposed unscented multiple model adaptive estimation (UMMAE) method for the fault detection and isolation is based on a set of UKF filters, each of which is responsible for one actuator and one that monitors the healthy condition of the system. The authors use various techniques to improve their method, including: an active supervision module to reduce the ambiguities between the redundant or coupled actuators, spherical unscented transformation to reduce computational cost, and fading memory to place more emphasis on recent measurements instead of past measurements, which makes the filter less sensitive to modeling errors and provides greater robustness. The simulation tests in MATLAB/Simulink were carried out on closed-loop control for some sample faulty scenarios. The described method was compared with extended MMAE for several actuator faults, such as locked-in-place and floating faults of the control vanes and auxiliary fans failures. In each of the tested examples, the proposed UMMAE showed greater efficiency and more rapidly fault isolate. For the specific ducted fan UAV design presented in the article, the UMMAE-FDI turns out to be a better choice.
An article slightly deviating from the mainstream presented in this review, but still dealing with the detection of unmanned aerial vehicle faults, was written by Papaliakos et al. In their work [60] they present calculable residual generators for large scale systems. They describe the assumptions of structural analysis and introduce a minimal cost method of finding causal, computable residual generators. The authors propose a method of reducing the time needed to generate generators by combining a priori and a posteriori graph processing. They divided it into three steps: Dulmage-Mendelsohn decomposition, a priori matching propagation, a posteriori matching selection. They applied their method to a fixed wing UAV mathematical model. Thirteen residual generators were required to achieve full fault detection. The authors showed that depending on specific search criteria, different types of residual generators can be obtained.
Set-theoretic robust fault detection of longitudinal motion is described by Tan et al. in [61]. In order to detect faults of the fixed wing UAV actuators, the authors use the discretization of the continous-time quasi linear parameter-varying (qLPV) system. They propose to use interval observers to implement robust FD. During the simulation tests, two scenarios were checked: fault in throttle level and fault in elevator. The proposed system detected the throttle level fault immediately, while the elevator fault was delayed.
In [31], the authors present sensor and actuator fault detection, isolation, and accommodation system for a small UAV. They use robust Kalman filter (RKF) and simplified RKF to diagnose speed sensors and elevator faults. They perform simulation tests on a small UAV model comparing the results with the optimal KF and robust KF during the occurrence of the fault and without faults.
Witczak et al. in [62] propose a scheme for simultaneous estimation the thrust balance and the state under uncertain environment. It allows to detect faulty/fault-free situation of the system and provide proper control. A great advantage is the ability to implement an approach based on paradigm in popular systems such as Arduino or Raspberry Pi. For the purposes of the tests, a small four-rotor drone with a lightweight modular carbon-fiber and aluminum structure was constructed. Its continuous nonlinear mathematical model was prepared and the estimator design procedure was performed. It has been proven that the proposed estimator is solvable. During the experiment, the position of the drone oscillated around a given point, which was mainly caused by the wind. So while the balance of the thrust remains unchanged, the orientation of the UAV is modified by the wind. Experimental results confirm that fault detection using the proposed method can be performed with considerable accuracy. As the authors postulate, the described approach can be used for effective fault-tolerant control.
A completely different approach to the problem of detecting damage to unmanned aerial vehicles was presented by Żugaj et al. in [63]. In this work, the analysis of control system failures was carried out using the dynamic model of the fixed wing UAV with 6 degrees of freedom. The authors execute a numerical simulation of aircraft behavior during: fault free configuration, and blocking one elevator in the neutral position. The results show a large impact of actuator locks on the dynamic performance of the aircraft, and the analysis of the control system indicates its reconfiguration capability, which can be used to improve the aircraft’s reliability in flight.
Airspeed estimation using various sensors was presented by Guo et al. in [64]. IMU, GPS and weather vane sensors were used to detect pitot tube faults. In the proposed solution, analytical redundancy methods such as Kalman filtration, chi-square test, and cumulative sum filter were used. Data from the accelerometer, gyroscope, GPS receiver, and wind vane are sent to the extended Kalman filter (EKF), which determines the "virtual airspeed". This value is compared with the readings from the pitot tube and the difference is used to detect a possible failure of the latter sensor. The tests were carried out on two different aircraft with identical sets of sensors.
Park in [65] discusses a steady wind and airspeed bias error estimation method using airspeed sensor and GPS. The author proposes a relatively simple algorithm based on the novel design of en extended Kalman filter, which can be used in small UAVs also for aircraft heading angle estimation. He performs simulations on a dynamic model of the aircraft, and then a series of real flights with a fixed wing UAV, achieving several basic maneuvers with it. The results of the experiment confirmed the effective of proposed method for wind and airspeed bias error estimation.
In the study [66], Yi and Zhang present a method of fault diagnosing of an unmanned quadrotor with the use of a particle filter. They present the modeling of: actuator dynamics, engine failures, and particle filter. They then conduct tests using the OptiTrack cameras as the reference system. The tests include detecting control effectiveness loss in one, two, and three engines sequentially.
Zhong et al. in [67] investigate the possibility of using the adaptive two-stage extended Kalman filter for sensor fault detection in UAVs. In their work, they model the kinematics of the quadrotor. This is a rather non-standard approach. The authors note, however, that in the typical modeling of the dynamics of an unmanned vehicle, the uncertainties and the gyroscopic effect have a large impact on the propellers’ rotation and the plant itself in space. To check the effectiveness of bias and drift faults detection, simulation tests were carried out on the Quanser Qball-X4 model. The experiment was based on a square-shaped trajectory flight. The following scenarios were checked: no fault, bias and drift faults occurred separately, and simultaneous bias and drift fault. The tests showed the ability of the proposed solution to meet the assumed goals.
Actuator failure studies for small fixed wing UAVs equipped with a puller-type electric motor were carried out by Bauer et al. [68]. The authors prepared fault detection and basic in-flight reconfiguration system for aircraft elevons stuck. They use the multiple model adaptive estimation method and linear time-invariant (LTI) Kalman filtering to detect left and right elevon stuck. If the stuck position is small, reconfiguration is also possible to allow the flight to continue. The tests were carried out on the basis of software-in-loop simulation, taking into account the Vireo drone model, the environment with various atmospheric turbulences, and magnetic and gravity models. The stability of the reconfiguration system is not proven in this article.
The relatively rarely discussed topic of detecting mechanical damage to the drone’s frame structure was undertaken by Bowkett et al. in [35]. They conducted research on the detection of the loss of one of the quadrotor arms and the possibility of changing the configuration of the flying vehicle from a structure with 4 propellers to a triritor. With the use of a thin copper wire, which is appropriately braided around the UAV frame, recognition and determination of the location of the place where the continuity of the frame is broken is carried out. The authors used a mesh structure applied to the FR4 board. This method gives better results than the typically used wafer structure. Ten flights with a drone with 3 operating propellers were carried out in unfavorable weather conditions. All flights were successful, but the research was used data from two flights. The control was without major problems and the flights were stable. The test confirmed 100% effectiveness in detecting critical failures and about 50% effectiveness in the early detection of the first symptoms of mechanical damage. Adaptive control allows to continue the flight or safe landing after losing one arm. Taking into account the different configurations of the drone’s frame, the X-frame design with symmetrical weight distribution turned out to be the most advantageous.
The problem of attitude estimation using low-cost sensors is discussed in [69], in which the authors describe a fault detection method based on duplex IMU redundancy. They present the attitude estimation method using the quaternion-based system and set-based approach. The algorithms for the detection and isolation of gyro, accelerometer and magnetometer faults are described. Authors conduct tests on the basis of numerical data, during which they test the detection: abrupt bias, slow drift, and abrupt freezing. The following flight conditions are simulated: vertical flight, forward flight, coordinated turn, and heading change in hovering.
In [70], an extended PMI fault detection filter for detecting sensor faults, is presented. The authors use both inertial and non-inertial sensors. The extended proportional and multiple integral (EPMI)-based fault detection filter (FDF) method presented therein, in the absense of unknown input is actually a well-known extended Kalman filter. Cumulative Sum filter is used for detecting the abrupt change of residual. To show the effectiveness of the proposed fault detection solution, simulation tests were carried out using the Ultra Stick 25e UAV. The experiments were performed for two scenarios: pitot tube stuck and accelerometer bias failures, but the authors ensure the efficacy for other types of sensors too.
The innovation approach based model change detection algorithm with multiple system noise scale factors is presented by Hajiyev in [71]. The proposed method uses multiple system noise scale factors (MSNSF), which—unlike MMNSF [57]—is sensitive not to sensor faults, but to actuator/surface faults. The algorithm used is applied for the model of dynamics of UAV platform, and an actuator/surface faults cause the additive changes in it. MSNSF is used for the monitoring statistics. Simulations were carried out on the ZAGI UAV model for various loss of effectiveness types: partial loss, deformation, and icing of a control surface. They concern actuators: elevator, ailerons, and rudder. For ailerons and rudder faults, the longitunal motion parameters are estimated accurately, and lateral motion parameters estimation results are deteriorated. However, in the case of elevator fault, the results for the individual motions are opposite. The biggest advantage of the solution is the simultaneous detection and isolation of faults in real time. However, the disadvantages include the operation of the approach only when all states of the system are measured. Additionally, fault identification is not enable.
Lee et al. in [72] propose a combination of different inertial navigation system (INS) fault detection methods to ensure correct navigation during long-term missions of UAV. They designed a fault detection parameter method to isolate a faulty sensor from correlated sources of navigation system faults. In order to separate the damaged sensor from other sensors with the same type of output measurement data, an optimal combination of the proposed method with the well-known residual-based methods was developed. The federated Kalman filter with fusion-reset feedback structure mode was used for this. The technique described can detect, isolate and reconfigure faults. Signal-based FDI techniques cannot cope with such tasks. Faults have been divided into five classes: bias-type faults, drift-type faults, freezing-type faults, loss of measurement accuracy faults, and increasing error faults. The first two types of faults have been modeled for the simulation. Four decision-making methods were discussed: 1. residual check, 2. one-sided cumulative sum (CUSUM) test, 3. proposed technique uses an fault detection parameter (FDP), 4. sensitivity factor check. For fault detection, the combinations of methods 1 and 4, as well as 2 and 3 were used and compared. They were tested with 100 Monte-Carlo simulations. The combination of the CUSUM test and the proposed technique was determined to be the most appropriate. Then tests were carried out on physical equipment. Both a car and an airplane were used. In both cases the detection of the drift-type barometer fault was delayed and the test trajectory was the worst, but all imitated faults was succesfully detected. The described FDI algorithm has been designed with minimized misdetection rate and by a non-occurring false alarm.
A universal system for detecting faults to both sensors and actuators was developed by Ma et al. in [73]. They studied nonlinear high-gain observer-based diagnosis and compensation for quadrotor faults. The authors focused on solving the problem of output-feedback-based fault-tolerant control for UAV with adaptive observers. The main contribution of the described work includes: presenting the controller for the compensation of simultaneous faults of sensors and actuators in the environment with disturbances and uncertainties; estimation of fault parameters using adaptive estimator. The work consists of the development of a UAV model, design of a fault-tolerant controller, and an analysis of the stability and robustness of the system. Simulations were carried out in the MATLAB environment, during which the behavior of the system was tested for bias in sensors, external inputs or force bias in motors. Four scenarios were checked: actuator faults only, sensor faults only, nonsimultaneous composite faults, and simultaneous composite faults. Then, experiments were performed using the self-developed quadrotor. The tests confirmed the correctness of the theoretical assumptions and the good operation of the system.
In the article [74] Zhong et al. propose a robust actuator fault detection and diagnosis scheme for quadrotors. The system is based on a linearized dynamic UAV model and a decomposed adaptive augmented state Kalman filter (AASKF). The authors present in detail the mathematical model used and the preparation of individual versions of Kalman filters. The simulation results prove the effectiveness of detecting actuator failures and external wind disturbances.
Another work on the use of extended Kalman filter for UAV fault detection is [75]. Demircan et al. are investigating the ability of this type of nonlinear filter to detect the aileron locking in fixed wing aircraft. They show the process of building a 6-degrees of freedom (DoF) UAV model and a fault detection system. EKF is used to estimate the state for the roll rate, which is directly influenced by the aileron part. In MATLAB, they simulate four scenarios: one nominal and three with aileron lock. In each of the tested cases, the defect was correctly detected. The authors recognize computational time as not high, and the work of the filter as well.
Guzmán-Rabasa et al. propose FDI system for quadrotor [76]. Actuator fault detection uses the LPV technique. The UAV dynamic system has been divided into 2 subsystems: the translational and the rotational system. The proposed LPV observer from performance was synthesized. The described method considers the dynamics of the rotors and their influence on the displacement of the Euler angles of the aircraft. Its stability is confirmed by the linear matrix inequalities (LMI) analysis. The detection of partial and complete rotor failures as applied to rotational dynamics is confirmed by numerical experiments in the MATLAB environment using the linear quadratic regulator (LQR) controller.
Rotondo et al. in [77] presented a fault diagnosis system and ice accretion in unmanned fixed wing aircraft with the use of linear parameter varying interval unknown input observer. They conducted a detailed mathematical analysis of the problem, determined the impact of icing effects and proposed a diagnosis algorithm. They simulated the Zagi Flying Wing model in four scenarios: no faults, linear loss of propulsion efficiency, linear loss of elevator efficiency, and UAV icing. The authors point out several advantages of their approach: it can take into account the changes of the operating point, using the LPV paradigm, the presence of the integral term increases the noise suppression properties, ensuring the absence of false alarms.
Both sensor and actuator faults were detected using differential flatness-based diagnosis by Saied et al. in [78]. The authors modeled a hexarotor UAV, six sensor faults and six motor faults. Flatess technique was used to generate the residuals. They performed numerical simulations for both sensor and actuator failures, followed by a real outdoor flight using a Tarot hexarotor, during which motor total failure was injected. Motor faults were detected and localized quickly and efficiently, and the capacity of detecting sensor anomalies was simulated.
Venkataraman et al. in [79] compared three different fault detection methods. They prepared and conducted stuck control surface fault detection efficiency tests for the fixed wing UAV. This work is an extension of the previous research [68] and complements it by adding two other methods and comparing their industrial relevance using real flight data. In order to detect elevon stuck, the following methods were implemented: parity space (which compares sensory measurements with model-based prediction), a method involving the concept of robust estimation for linear parameter-varying system, and multiple model adaptive estimation. Data from the IMU, GPS, magnetometer and pitot-static system were collected over two flights with a rectangular path shape at a constant altitude. Both flights consist of five test points, and the trailing edge up stuck faults are injected in the right elevon. The first (baseline) method estimates the residual of the roll state, has the smallest state dimension, can only detect the presence of a fault, and using it, there was a case of not detecting one fault event. The robust LPV method estimates left and right elevon deflections, it is the fastest, it omitted the detection of one defect, but it can isolate the place of the error. The third method based on MMAE contained the most states and was the slowest, but detected all faults and was able to estimate their magnitude, so it can be used in a reconfigured flight controller. So choosing the best filter is not a trivial problem and depends on many aspects. The authors conducted research on the Vireo UAV model, but they ensure the universality of the proposed solutions and the possibility of extending their implementation to UAVs with different configurations.
Wang et al. [80] conducted the research on actuator fault detection and reconstruction scheme for the hex rotor. A lift model of actuator was built. Actuator faults are divided into two main categories: failure and gain fault. A set of fault observers were designed, which are based on the extended Kalman filter, and the state feedback provides a multi-sensor navigation unit, which consists of an accelerometer, gyroscope, magnetometer, barometer and GPS module. In their research, the authors focused not only on typically considered engine failures, but also rotor failures and drive circuit board faults. The latter group analyzes: open circuit of three-phase full control bridge, phase-changing failure, and MOSFET breakdown. In the article, they conduct stability proof after gain fault occurs and after failure occurs. To test the effectiveness of your solution, a numerical simulation was implemented, which confirms that the designed system can quickly detect the fault location and type, and achieve fault isolation. In turn, the flight experiment in outdoor conditions shows that the reconfiguration controller can guarantee the control quality and stability of the UAV position control after the occurrence of actuator faults and failures, and consequently effectively improve the reliability and safety of the flight.
In [81], Xu et al. present a solution designed for simultaneous robust control and fault detection for the ducted coaxial-rotor UAV. The approach includes integrated control and sensor fault detection, considers the uncertainties model, is based on theory and performance. The mathematical model of the described UAV structure is presented in detail, and the stability problem is satisfied by the Lyapunov theorem. The described control and detection strategy is tested using the LMI toolbox and simulation environment in MATLAB. A flight with disturbances, uncertainties and faults, and without these abnormalities was simulated. Compared to the other control method, the proposed solution has better robustness, better noise and disturbance suppression effect and is easier to implement. The featured observer-based controller has good disturbance attenuation and good fault sensitivity properties. The FD method has certain limitations in terms of low-frequency faults and multi-fault detection.
Zhong et al. in [82] present actuator and sensor fault detection for a UAV model. In the article the UKF and the suboptimal fading factor are combined for airspeed tube blockage and partial failure of the servo detection. For this purpose, a nonlinear longitudinal control system model is established. The conducted simulation experiments prove the quick and effective detection ability of the proposed suboptimal fading unscented Kalman filter (SFUKF) method.
In [83], Cristofaro et al. present a fault and icing detection system as applied to unmanned aerial vehicles. The authors developed a nonlinear vehicle model and then performed its linearization. They also modeled wind disturbance, icing and faults in actuators and effectors. The bank of unknown input observers was used to detect irregularities. Simulations were carried out using the Aerosonde UAV model, which confirm the effectiveness of the approach proposed by the authors.
Faraji et al. in [84] investigate the estimation of actuator faults in the helicopter UAV. The authors developed a robust three-stage extended FDI technique related to nonlinear features of the drone model in the hovering mode. They estimate, identify and classify bias, stuck and floating faults under conditions of unknown external disturbances. They conduct simulation tests in several different scenarios. They demonstrated the effectiveness of the proposed solution for various faults in actuators and simultaneous faults for helicopter actuators with external disturbance. The described method was also used in a later study [93].
Gao et al. in [85] discuss the FDD solution for the tilt-rotor UAV actuator fault. In their solution, they use a combination of EKF with multiple model adaptive estimation methods for the purpose of detecting left and right aileron stuck. The presented idea is based on the online calculation of the fault conditional probability. The proposed method can effectively detect irregularities in the work of ailerons, even when the actuator is stuck near the trim position. The model used consists of only three Kalman filters, which guarantees a low calculation cost. In order to verify the described method, simulation tests were carried out on the 6-DoF UAV model with the use of MATLAB in an extreme state with minimal excitation of the system. Experiments have demonstrated the ability of the system to detect actuator faults with high level accuracy and efficiency.
Hajiyev et al. in [86] presents the two-stage Kalman filter approach. Contrary to their earlier works ([57,71]), where he dealt with sensor and actuator/surface faults, in this work he and their co-authors focused on the estimation of wind speed and UAV flight parameters. However, the topic of sensor fault detection is also discussed here. They propose a 2-step estimation procedure for angle-of-attack, side-slip angle and wind velocity based on readings from GPS, IMU and pitot-static tube. In the first phase, the extended Kalman filter works, which uses the readings from GPS and pitot tube to estimate wind speed. In the second stage, the linear Kalman filter estimates the stage parameters based on GPS and IMU data and uses the air speed estimation from the first stage. Between these two phases there is an algorithm responsible for fault detection. If a sensor malfunction is detected, a robust Kalman filter is activated to ensure fault tolerance and accurate estimation results. The discussed solution has been simulation tested. Both noise increment and continuous bias fault were correctly detected in the GPS module and pitot-tube, and the robust two-stage Kalman filter (TSKF) mitigates the effects of sensor failures.
The method for detecting faults of quadrotor actuators with atypical design is presented by Zhang et al. in [87]. A set of five Kalman filters processes data from the barometer, gyro and accelerometer. An online fault diagnosis method based on interacting multiple model performs the analysis in the new Y-shaped rotor. The laboratory-self-made drone model was used for simulation tests during which six maneuvers were performed. Tests confirmed the effectiveness of the method in quick detection and accurate localization of actuator failure and stably estimate the efficiency parameters after a fault occurs.
Zuo et al. in [88] investigate the unscented information filter (UIO)-based sensor fault diagnosis scheme and fault compensation method for quadrotor UAV. The unknown input observer is designed using interference decoupling method, in which faults and interferences are treated as unknown inputs. In order to ensure the stability of the UAV after a sensor fault and to eliminate the influence of such a fault, the proportional derivative feedback compensation fault-tolerant controller has been designed. Two scenarios of sensor failures were prepared and simulation tests were carried out for them in order to investigate the effectiveness of fault diagnosis. Additionally, one scenario was used to test feedback compensation.
The use of particle filter application for fault detection and isolation of unmanned aerial vehicles is presented by D’Amato et. al. In the article [89] authors focus on the detection of malfunctions of low-cost inertial sensors used in micro- and mini-UAVs. They use two parallel particle filters. Each of them is responsible for a single 3-axis accelerometer, gyroscope, and magnetometer system. The sensor-FDI algorithm along with the particle filter were written in the MATLAB environment and then transferred to an embedded system based on Raspberry Pi 3B. The FDI system monitors the health of both IMUs and determines the average attitude based on their indications. If a malfunction of any of the sensory modules is detected, the attitude is calculated on the basis of readings from an operational IMU. The operation of the system was divided into three steps: fault detection, fault isolation, and fault recovery. Numerical simulations were performed using the flight readings of the light tri-rotor aircraft. Several common sensor fault scenarios were considered: intermittent abrupt bias, slow drift, abrupt freezing, oscillation, and random walk. The tests included various system parameters, including a different number of particles and detection time.
Detection of sensor and actuator faults in relation to class of singular Markov switching system with mixed time-delays is described by Fu et al. in [90]. The authors used a robust adaptive observer, which they implemented in the quadrorotor model. The article provides an extensive overview of the mathematical structure of observer and the robust fault tolerant control system design. During numerical simulations in which the FTC was applied to the lateral motion, the case of without failure and various cases of failures were examined. These tests confirmed the usefulness of the used fault tolerant control scheme based on fault signal reconstruction in unmanned multirotor applications.
In [91], Maqsood et al. propose the novel FDI method for quadrotor UAV. The authors present fault detection technique for angular rate sensors in order to quickly detect faults and improve fault identification and reconstruction. They use the chain differentiator integrator to estimate faults and a modified high gain observer for fault detection with higher accuracy. The introduction of a sliding mode effect in the observer algorithm improved the detection ability, eliminated overshoot and chattering, and provided more accurate detection results. Numerical simulations were performed for both gradual and abrupt faults. The following types of faults in the gyroscope rate sensor were tested: incipient, oscillatory, intermittent. The method proposed in the article was compared with traditional integral chain differentiator (ICD) and high gain observer (HGO) detection strategies. The results of the experiment show its clear advantage over other tested nonlinear techniques. In addition to better performance of detection, it is also characterized by lower computational complexity.
Miao et al. in [92] propose an adjastable nonlinear proportional integral state observer for fault diagnosis of a fixed wing unmanned aerial vehicle. This algorithm in combination with the parameter updating technique is used to improve the effect of the additive fault estimation in single sensor. Two types of faults are investigated: step and periodic fault. Tests on numerical simulations of the L-1011 model for different values of the observer parameters show good effectiveness in the case of linear problems, while the nonlinear model still needs to deal with several problems.
In another work [93], Nejati et al. consider robust three-stage central difference Kalman filter for UAV actuators fault in the presence of external disturbance. The filter used is an extension of the solution proposed by Zhong et al. in [74]. It estimates stuck, bias and floating actuator faults in collective pitch servo, elevator servo, aileron servo, and rudder servo in helicopter UAV. Simulation tests were carried out with the use of a mathematical helicopter model according to four different scenarios for UAV servos in hover mode with the wind acting as an external disturbance. It has been shown that the actuator fault detection can be decoupled and separated from disturbance. The results were compared with the robust three-stage extended Kalman filter discussed in the previous article [84]. The proposed method can also be used for other types of structures in relation to the faults discussed in the article.
Sun et al. in [94] propose an algorithm based on two identical synthetic air data systems for the detection and isolation of water-blockage pitot tube failure. This solution is dedicated to small UAVs, which are equipped with an air data system, which is responsible for measuring the airspee, angle-of-attack and angle-of-sideslip (i.e., fixed wing aircrafts). The authors designed a system to detect and isolate air data faults with a double pitot tube and developed a sequential integrity monitoring technique in Kalman filter settings to assess the integrity risk of the designed fault detection algorithm. They also showed how to set alert limits and protection levels for angle-of-attack and sideslip states. Using the Phoenix drone, they demonstrated the capabilities of the algorithm based on the recorded flight data with the occurrence of water blockage of the pitot tube.
Bondyra et al. in their next study [98] continue to develop methods of detection and classification of multirotor blades faults. This time the authors decided to use a method based on Mel Frequency Cepstrum Coefficients. The sensors used were four microphones placed on the drone near the rotors. Two types of artificial neural networks were tested as a classifier: relatively lightweight long short term memory (LSTM)-based and more computationally complex convolutional neural network (CNN). The first one contains one LSTM layer and two fully connected layers. The second one contains six convolutional layers and one fully connected layer. Various types of damage (fractured tip, edge distortion) were tested, as well as the number and relative position of the damaged propellers. Data was collected during Falcon V5 drone flights during hovering, ascending, descending, and translational motions. The influence of the acquisition time, the number of cepstrum coefficients and the number and size of kernels were examined. For both classifiers high detection and isolation efficiency was obtained and the F1 metric exceeds 98%.
The article [95] by Cao et al. describes fault detection techniques based on the extended state observer and interval observer as applied to unmanned fixed wing aircraft. The first observer is designed strictly for the purpose of detecting faults, while the interval observer is designed by combining disturbances and faults. The authors developed a mathematical model with six degrees of freedom and modeled various scenarios: partial failure of actuator, actuator bias failure, and fault-free state. In the MATLAB program, realistic environmental conditions for the extended state observer study were simulated. This method showed low detection sensitivity in relation to partial failure, it coped well with the remaining cases. In the case of the interval observer, the larger the failure, the more clearly the system reacted to the failure. However, in both cases all the faults were correctly detected by the system. The great advantage of the proposed method is its ease of implementation for real-time detection.
The problem of dynamic event-triggered fault detection for fixed wing unmanned aerial vehicles was addressed by Gai et al. in [96]. The article examines the method. A UAV model with a variable sampling period based on the dynamic event-triggered method was created, and a residual generator was constructed. The optimal solution to the optimization problem was calculated using Riccati recursion. A new method for determining the function and evaluation threshold of residuals was also proposed. The operation of the presented method has been verified in the altitude control system. Simulations were carried out for three different faults in both the open-loop and closed-loop system. The proposed optimization method successfully eliminated the Zeno phenomenon. The method showed better performance in various UAV faults under open- and closed-loop control and reduced information of event transmission compared to the static event-triggered approach.
An interesting study was conducted by Hamadi et al. in [97]. The authors investigated the fault tolerant strategy in the event of both hardware sensor faults and software faults occurring in the quadrotor. They used the simple form of Kalman filtering and its extended version for nonlinear systems. The developed algorithm was designed, among others, to detect faults in such modules as GPS, IMU, magnetometer, as well as errors in the Kalman filters themselves or incorrect initialization of parameters. A fault-tolerant architecture for data fusion system with an algorithm to detect and identify faults has been developed. In order to evaluate the operation of the system, they conducted outdoor flights with hardware fault injections on the GPS and LiDAR, as well as simulations with software altitude and position fault injections. Experiments have shown the ability of the developed architecture to function properly during hardware and software faults.
4.2. Data-Based Methods
A somewhat less popular group of methods used for UAV fault detection are data-based (data-driven, knowledge-based) methods. In recent years, this particular category of analytically redundant approaches using large data sets has been gaining popularity. This is probably due to increasingly powerful tools and effective algorithms for processing data, detecting patterns, and conducting classifications. This group, like the one described in the previous subsection on model-based, is divided by Zhang et al. [53] into quantitative and qualitative methods. The authors include statistical methods and neural networks in the first subgroup. On the other hand, the second includes expert systems, fuzzy logic, pattern recognition, frequency and time-frequency analysis, and qualitative trend analysis. Guo et al. in [99] divide data-driven methods into supervised, semi-supervised, and unsupervised. Table 5 contains selected parameters of research works applying knowledge-based methods. The publications included in the table are then briefly described.
Table 5.
Research works using data-based methods.
Al Younes et al. in [100] present fault tolerant diagnosis and fault tolerant control with the use of an intelligent output estimator for sensors of unmanned robots in quadrotor construction. The proposed scheme consists of the following stages: estimating the system’s outputs, residual generation, residual evaluation, decision-making unit, and fault estimation. Method effectiveness tests were carried out on the Qball-X4 quadrotor using the OptiTrack system as the ground truth. The bias sensor fault magnitude estimation was successful during the real flight experiment.
In [101], Li et al. are considering dynamic principal component analysis model combined with moving average technique for FDI in UAV. The authors use two actuator and five sensor parameters from the longitudinal flight control system as historical normal flight data for model training. They extend the principle component analysis (PCA) model to better suit the dynamic nature of the UAV and more effective fault detection. UAV simulation platform to generate normal steady flight data for training and faulty data for testing FD performance was used. and squared prediction error (SPE) metrics were compared for both detection and isolation of the following faults: angle of attack transducer measurement deviation, airspeed head measurement deviation, vertical gyroscope measurement deviation, pitch angular rate gyroscope measurement deviation, throttle lever partial invalidity, and elevator partial invalidity. The pressure altimeter fault was not considered.The detection efficiency of individual faults was also compared for the case of using the moving average technique and with its omission. Contribution plots were used for isolation. High detection and isolation efficiency was achieved with , the SPE did not give satisfactory results. The described method only works when UAV operates in a steady flight state.
The article [102] presents the design of the cascade tracking controller and fault detection and isolation system for a planar vertical take-off and landing (VTOL) vehicle. This UAV model consists of only 2 motors that rotate in opposite directions. There is a double propeller next to each motor. The UAV dynamic system is divided into three subsystems, two of which are based on the qLPV model and the third is linear. The authors provided and partially proved the asymptotic stability and observability of the system. Tests for proper detection of total and partial faults were performed during the simulation using a nonlinear model.
In paper [103] the authors propose their solution using support vector machine (SVM) to detect actuator failures. The training and test data from the gyro and accelerometer are simulated in the MAKO UAV model, the use of which is discussed in more detail in [122]. The work focuses on the loss of effectiveness faults. At the same time, they present a small overview of model-based and machine learning (ML)-based fault detection methods.
Bondyra et al. in [104] present a method of detecting physical damage to rotor blades, which reduces the thrust of the micro UAVs. The technique used is based on signal processing and constitutes a model-free approach. Three different techniques were tested to detect the occurrence of physical impairment of rotor blade: fast Fourier transform, wavelet packet decomposition, and measuring the signal power in frequency bands. Three different classifiers in the form of a support vector machine were used to diagnose faults, the task of which is to determine the occurrence of a fault, determine its severity, and the type of failure (damaged edge, distorted tip). As part of the tests, a stationary dynamometer stand with a BLDC engine was first prepared and a series of experiments with three propellers of various types and degrees of damage were carried out. Then, 10 experimental flights were performed using a multirotor consisting of four propulsion units with two coaxial rotor-motor pairs. Data from the two axes of the on-board accelerometer were used for the analysis. The impact of the data buffer length and the signal processing technique used on the effectiveness of individual fault diagnosis stages were compared. The proposed method is universal and easy to implement and has demonstrated high accuracy of fault detection. However, due to the central location of the IMU, it was unable to detect in which rotor the failure occurred.
Chen at al. in the article [105] propose a back propagation neural network (BPNN), which is extended to genetic algorithm for optimization. First, the three-layer wavelet packet divides the signal from the sensor into eight frequencies, the energies of which constitute inputs to the artificial neural network (ANN). The goal of the genetic algorithm (GA) is to optimize the initial weights and thresholds of BPNN. The simulation experiments were carried out in MATLAB for four scenarios including various types of sensor faults: no fault, deviation fault, impulse fault, and multiplicative fault. The proposed method obtained higher accuracy and lower errors compared to the solution based on typical BPNN.
In a subsequent article, [106] Chen et al. present another sensor fault detection algorithm using wavelet packet and back propagation neural network. Unlike the method described in [105], this time rely on adaptive fireworks to enhance the local search ability as well as to improve the convergence of the proposed algorithm. This algorithm adopts a distributed mechanism for sharing information in parallel. Wavelet transform splits the signal into a set of basis functions, which allows for multi-scale analysis. Thanks to the combination of parallel searching and global optimization, the described solution can improve the deficiencies of back propagation algorithm and ensures higher prediction accuracy. A neural network (consisting of eight input neurons, eleven in the hidden layer and three output neurons) was used for the experiment. Tangsig was an activation function of the hidden layer, and trainlm was used as a network training algorithm. The input data were rate gyroscope signals during normal operation and after sensor fault injection. Feature vector extraction was carried out through selecting the wavelet basis function, calculating the normalized energy entropy, and calculating the wavelet entropy of the fault signal. The proposed adaptive fireworks algorithm back propagation (AFWA-BP) achieved better classification efficiency, higher convergence speed, shorter running time, and stronger global search ability compared to GA-BP and particle swarm optimization (PSO)-BP.
Saied et al. in [107] present an active fault tolerant control approach for a multirotor unmanned aerial vehicle. Error detection and fault diagnosis of engines and rotors are performed using the speeds and electric currents of the brushless motors. The support vector machine was used as a classifier. The experiments were carried out on a coaxial octorotor drone and the effectiveness of the proposed system was checked during two scenarios. Simultaneous failure of two engines and a propeller loss were tested. The attempts confirmed the correct detection and localization of the tested faults.
In another work Bondyra et al. [108] are continuing their research on defect detection of the propulsion system of multirotor UAV. As in the previous work [104], the authors use the model-free approach to check for a fault. This time, however, a set of four accelerometers is used, thanks to which it is possible to locate the place where the fault occurred. The waveforms from the two axes of each sensor were converted to the frequency domain. Signal values from 16 frequency bands were input to the set of random decision trees. The effectiveness of detection and isolation of damage to single propellers as well as pairs of adjacent and opposite rotors was tested during real flights with the Falcon V5 drone. The effect of the number of grown trees and the length of the acquisition window on the accuracy of detection was compared. The results showed over 95% sensitivity in detecting and isolating faults.
An interesting and rare solution in UAV FDI applications was presented by Olyaei et al. in [109]. They propose a method based on deep learning image analysis, which carries out the classification of color images from time-frequency-amplitude graphs. The presented algorithm includes three main steps: database creation, training, and testing. The database consists of both faulty and fault-free signals. The signals related to sensors and actuators are divided into the following categories: bias, loss of accuracy, float, drift, and without fault. The obtained images with a size of 200 × 200 pixels were entered into the MATLAB database and then processed by Python software using the Tensorflow backend in deep network. The training accuracy after 1000 epochs was 98%. In addition, the article presents the classification of sensor/actuator faults in an accessible form, detailing the characteristics of each malfunction in a descriptive and graphic version.
In the next article [110] Al Younes et al. reuse the Qball-X4 quadrotor to test the effectiveness of fault diagnosis. Unlike their earlier work [100], in which they dealt with sensor faults, this time authors are checking actuator fault diagnosis. They synthesize the integration of a model free schema with a state observer for a MIMO system. They propose the intelligent Output Estimator method for fault diagnosis and fault tolerant control in the quadrotor. The uncertainties estimation is performed using the ultra-local model, which is continuously updated. Actual testing was performed on the 15% and 25% loss-of-effectiveness of the Qball-X4 front rotor. Both the FDD and FTC capabilities were tested during hover and square-path flights.
The study of propeller blade damage detection techniques was undertaken by Benini et al. [111]. In their regularized linear discriminant analysis method, they use the readings from the accelerometer, which is part of the high-rate inertial measurement unit, to perform actuator fault detection tasks. The authors propose a two-stage algorithm that is based on 45 different time and frequency-domain features. As best feature selection algorithm, an univariate filter approach based on the bootstrap method is proposed. In order to detect a fault, linear discriminant snalysis (LDA) is considered. An interesting drone—Germandrones Songbird VTOL UAV—was used in the experiments. It combines the features of a fixed wing aircraft during flight and the flexibillity of a multirotor UAV during take-off and landing. The focus is on quadrotor-mode as it is where the impact of a damaged propeller blade is most noticeable. During fully autonomous flights, data from the IMU were collected during a flight with one or two modified blades. Tests included normal condition flights and with broken propeller during: hovering, climbing, landing, and complete flight. The most appropriate phase of flight to detect propeller damage turned out to be climbing, which worked well for both time and frequency-domain features.
Guo et al. propose optimized one-class support vector machine (OOCSVM) approach regulated by local density. In [99], they present FD for UAV sensors based on one-class SVM classifier without negative samples. The authors decided to use the boundary-based method due to the higher efficiency of detecting small amplitudes in comparison to other types of unsupervised fault detection algorithms. The proposed method provides robust performance without prior knowledge of the instances. It also does not require prejudgment. The article shows the method of determining the optimized classifier and the rule for computing the tolerance coefficients. In the experiment, the Ultra Stick 120 model was used to detect simulated faults, but the control law was used in the real flight of the mentioned UAV model. Constant deviation and drift were injected in the gyroscope. True positive rate (TPR) and false positive rate (FPR) values as well as area under curve (AUC) for receiver operating characteristic (ROC) curve for the detection of roll rate disturbances were compared with other methods: common OCSVM, PCA, kernel principle component analysis (KPCA), local outlier factor (LOF).
Iannace et al. in [112] have used sound analysis in order to fault diagnosis for quadrotor blades. The authors perform unbalanced blades detection on a UAV attached to a tripod. At a distance of 1.2 m from the drone, there is a microphone that collects sounds emitted by the rotors. Measurements were made from 4 sides of the vehicle in each of 3 cases: balanced blades, unbalanced blade with one paper strip, unbalanced blade with two paper strips. After collecting the data, 31 frequency features were distinguished for each of the three classes. The set of features was divided into training and testing sets. The training set was used to train the feed-forward multilayer neural network model, while the test set was used to check the effectiveness of the trained classifier. The efficiency was 97.63%. The presented method of testing the drone can be used in indoor conditions in the pre-take-off procedure in order to detect any irregularities before the actual flight begins.
Two-layer fault detection for fixed wing UAV incremental flight controller is proposed by Ignatyev et al. [113]. This method uses angular accelerations and current control deflections to minimize the dependence on the UAV model. The idea of incremental dynamics was used to design the incremental backstepping controller. The incremental backstepping (IBKS) structure consists mainly of two blocks: angle controller (measurements of the attitude state derivative) and rate controller (evaluations of angular rate derivatives). The main advantage of IBKS is that it does not require any knowledge of the model. An amplification matrix is used to decrease the aircraft flight control system signals. In order to estimate the parameters, the algorithm of recursive linear regression with exponential forgetting is used. The division of tasks of the two layers of the proposed method is as follows: the first layer monitors the combined control effectiveness and detects possible irregularities. If an anomaly is detected, the second layer localizes the fault and determines the individual effectiveness of each control surface. The nonlinear model of the Tekever AR5 was used to conduct simulation tests. It is medium-altitude, medium-endurance, two engines, two rudders, and four ailerons fixed wing UAV. Two types of damage were tested: stuck in position, and hardover of the each of the four ailerons.
Wang et al. in the article [34] describe data-driven multivariate regression approach using LSTM with residual filtering. To detect faults, mitigate the impact of random noise, and ensure rapid recovery from failure, they propose the LSTM-RF regression model. They extract space-time features from flight data and the FDR requirements turn into a regression issue. They investigate roll bias and roll drift as common sensor errors. The main element of the regression model is a 3-layer neural network in which the hidden layer is formed by LSTM memory cells. Each stage of designing the model used is presented in detail, loss function formula, methods used to prevent overfitting, calculation of the detection threshold, fault detection steps, etc. The gyroscope bias and drift detection efficiency tests were carried out both in simulation and in real flight. TPR, FPR, accuracy values, and ROC curve were compared with other commonly used LSTM-based methods.
Kantue et al. in [114] present an integrated approach to UAV fault detection and diagnosis. To detect, isolate and identify an incipient fault in a three-phase BLDC motor, the authors use the time difference of arrival principle. The time difference of arrival (TDOA) method has not been used for UAV actuator faults before. This is an effective data-driven technique that does not require a priori knowledge of the stage of the source. The time of arrival difference detection process requires at least two signals to be available. A continuous forward algorithm with a golden section search was adopted for the purposes of real-time implementation. Radial basis function neural network (RBFNN) was used to train and test the data. A hardware-in-the-loop model simulation was carried out using the MATLAB environment, ARM microcontroller and Windows PC to predict bias and variance errors. The big advantage is the speed of the NN training process, which is performed before the next batch of data is available. However, the method has limitations in the form of the amount of available memory and fault detection accuracy.
In a work using the technique of deep learning [115], Sadhu et al. detect and identify the causes of the drone’s mis-operations. Using the Convolutional Neural Network (CNN) bidirectional long short term memory (Bi-LSTM) autoencoder network and accelerometer, gyroscope and magnetometer readings, they classify propellers failures in 9 different scenarios. Data was collected during flights with 3DR Solo and Crazyflie 2.0 UAVs. Then, simulation tests were carried out in Microsoft’s AirSim drone simulator as well as real-world experiments. The classification accuracy was about 99% and 85%, respectively. The results were compared with the SVM classifier.
Interesting research was conducted by Wang et al. in the work from 2020 [116]. Two models based on LSTM networks were prepared—one traditional and the other using the PCA technique. It was used to reduce the size of the input to the network. The structure itself contains 1 input layer, 2 hidden layers with 30 nodes each, and 1 fully connected output layer. The proposed FDMA consists of two main parts: the model pruning to reduce the size of the model, and the field-programmable gate array (FPGA) acceleration which meets the condition of parallelism of calculations and is customizable. Each model is available in three versions: original, computing optimized, and quantized—fault detection model acceleration engine (FDMAE). The results of the experiment based on real gyroscope data collected during the small fixed wing UAV flight were compared both for different versions of the models and during processing with different calculation units. Compared, inter alia, error value, number of false alarms, time and power consumption. Particularly high AUC values confirm the high efficiency of the proposed fault detection method.
The methods based on the analysis of sound signals are proposed by Altinos et al. in [117]. Based on information from the microphone, they detect damage in BLDC engines, which are typical solutions for both military and civilian drones. Thanks to the use of fine decision tree, quadratic support vector machine, and medium k nearest neighbors classifiers, the most common engine failures are recognized. Simulation tests were carried out, in which bearing, eccentric, and propeller failures were classified after distinguishing six statistical features. Accuracy was achieved on the level above 90% for each of the three engines with different rotational speeds. The SVM method proved to be the most effective, sometimes reaching even 99.75%. The proposed method is fast and allows for implementation in embedded systems and work in real time.
Park et al. in [118] perform fault detection analysis using a stacked autoencoder. Using an unsupervised deep neural network, they perform a binary classification for different types of faults of UAV. They present an interesting approach that generalizes the type of drone in which the detection of irregularities is to be used. The research described in the article is a continuation of the previous work [123]. It was extended by a series of analyzes for feature extraction, establishing the fault detection model by only training the safe state data, examining the proposed solution on two types of datasets. Both cyber attacks such as GPS spoofing and denial of service (DoS) attack, and actuator failures are contemplated. Two datasets were used: UAV attack dataset without recovery measures and AirLab Failure and Anomaly dataset with recovery measures. The first one was collected during the flight of the quadcopter in a simulated environment, and the second one during the real flight of the fixed wing UAV. The effectiveness of fault detection was tested in various scenarios. The best result was the fault detection during the GPS spoofing attack (AUC = 0.9969), and the worst during the aileron failure (AUC = 0.7509). The proposed method is characterized by high computational complexity, therefore it is proposed to use efficient graphical computing units and UAV communication with the ground station.
An unusual solution for detecting faults in the engines of small drones is proposed by Souza et al. in [119]. They present a chaos-based signal analysis using the density of maxima technique to analyze brushless direct current motors. It is not computationally complex, and its simplicity is considered by the authors to be the main novelty. A one-second data sample is sufficient for the satisfactory efficiency of engine speed estimation and failure detection. A testbench with a BLDC motor was set up to collect data and validate the results. The readings from the two axes of the accelerometer were processed by signal analysis based on chaos using density of maxima (SAC-DM), and wavelet discrete transform (WDT) was applied to extract only the chaotic components. Five experiments were carried out for each of the three selected engine rotational speeds and the effectiveness of its estimation was tested. The average accuracy of the speed estimation was 97.8%. For the fault detection study, five flights of five minutes each were carry out with one person controlling the quadcopter by operating the same smooth movements. The following scenarios were prepared: balanced flight, shifted center of gravity, unbalanced propeller (in different degrees), and their combinations. However, the fault classification itself included only two classes: failure and non-failure. The detection accuracy for different types of faults ranged from 33.1% to 100%, averaging 82.75%. The method used is sensitive even to weak disturbances. Despite the low computational requirements, the accuracy is relatively high.
A Compound Fault Labeling and Diagnosis Method is described by Zheng et al. at [120]. Based on flight data and Bulit-In-Test record of the UAV, they categorize various types of faults. The authors collected data from the TYW-001 fixed wing UAV and processed it using different techniques. They upgraded the original diagnostic model based on the Gradient Boosting and Fully Convolutional Network Decision Tree to eXtreme Gradient Boosting, Light Gradient Boosting Machine and modified Convolutional Neural Network. Data collected was large-scale, high-dimensional, multi-class, imbalanced, and noisy. 200 instances from each test flight were randomly sampled and labeled manually. The data was then divided into test and training sets. The total data set consisted of 457 parameters and one label containing 98 classes. All 98 condition classes were analyzed in order to finally establish 49 new classes of complex failures. The effectiveness of five different classifiers was compared. Extreme gradient boosting (XGBoost) turned out to be the best, but it was the slowest. On the other hand, light gradient boosting machine (LightGBM) was characterized by the highest classification errors, but due to its low complexity, it has the potential for an early warning system.
The article [121] presents a time-domain frequency estimation approach for the detection of partial defects of multirotor blades. The method is based on the well-known subspace identification method and avoids the pseudospectrum peak search. Recursive frequency estimation is based on Cholesky decomposition. By using a small matrix instead of a full, extended observability matrix, a lower computational cost is ensured. A gap-metric oriented performance indicator is proposed for detecting the fault and assessing the severity of the fault. It was introduced as a test statistic for monitoring frequency change from a subspace perspective. The greater the value, the greater the severity of the error. The proposed algorithms were tested for damage diagnostics on measurements from the laboratory UAV platform with partial blade damage. 100 Monte Carlo simulations were performed and the effectiveness was assessed using root mean square error and average gap metric. Signals with different signal-to-noise ratios were checked using the fast Fourier transform (FFT), Aboutanios-Mulgre, Candan techniques and the proposed algorithm. It showed higher frequency estimation accuracy, unfortunately the authors described fault detection performance as acceptable.
4.3. Mixed Model- and Data-Based Methods
Some of the damage detection studies under consideration include methods that incorporate techniques classified as both model-based and data-based. There are also some that are difficult to categorize into any group from the typically used division. Some authors use assign the methods shown in this subsection to a specific group. For example, according to Wang et al. the NN-EKF method belongs to the model-based group [34]. Sometimes the authors themselves point to a specific group of methods. E.g. Zhang et al. describe their method as model-based. However, due to the use of neural networks and fuzzy system, the publication [124] was classified as using methods from both groups. Articles that were hard to clearly classify as describing model-based or data-based methods are presented in Table 6.
Table 6.
Research works using mixed methods.
One of the less frequently discussed topics related to the malfunction of UAV sensors is a deliberate attack. Abbaspour et al. [125] present their own fault data injection attack detection mechanism. They propose a system based on a 3-layer adaptive neural network, the coefficients of which are updated using the embedded Kalman filter, which accelerates the network learning rate. Tests conducted in the MATLAB Simulink environment confirm the effectiveness of both fault data injection attacks and sensor failures caused by other factors.
In [54], Abbaspour et al. continue their research on the damage detection mechanism using an artificial neural network, the weighting parameters of which are updated with EKF. In this article, the authors deal with various types of sensor and actuator failures. They present the applied nonlinear UAV model with 6 degrees of freedom, the neural network update law, and prove the stability of the neural network adaptive structure (NNAS)-based FD method. The authors test the ability of the network to quickly detect abrupt, intermittent, incipient, and multiple faults and compare the results with a similar system based on a classical neural network. The tests, as in the aforementioned work [125], are carried out on the WVU YF-22 model simulated in the MATLAB environment. Notably, apart from the higher efficiency, is the significant increase in the computation speed of the proposed method in relation to the standard updated NN.
Fan et al. analyzed the different types of UAV engine faults in [126]. Based on telemetry data such as engine speed, lubricant pressure, oil temperature, and cylinder head temperature, they detect eleven typical engine faults. The diagnosis process was performed using three different methods. The results of the classification were compared with the use of: particle filter, k-means cluster, and multi-layered perception NN. The accuracy rate for individual faults and detection methods ranged from 86.43% to 96.98%. For the mutation of fault diagnosis, the diagnosis effect of particle filtering (PF) was worse than that of neural network and k-means, but for creep failure, PF performed best. Unfortunately, the use of the particle filter method entails increased computational complexity.
The article [127] presents fault detection using a robust adaptive observer combined with radial basis function neural network. This system is used to estimate the interference of the UAV attitude system. The authors describe the observer structure and the FD method and conduct simulations that show that the proposed method provides smoothness and continuity of the elevator, aileron, and rudder deflection under external disturbances.
The paper [124] shows the malfunction detection setup of the navigation system of a small helicopter. Kalman filtration was used to detect damage, which processes readings from microelectromechanical system (MEMS) inertial sensors and a GPS receiver. The FDD system was developed based on the fuzzy system and the 4-layer neural network.
In turn, in [128] Cheng et al. present global navigation satellites system fault detection and exclusion algorithm for UAV positioning. The proposed method is based on historical data from the satellites of the navigation system and copes with the following satellite malfunctions: clock bias, ephemeris error, multipath, tropospheric and ionospheric errors. The authors use the pseudo-range rate-based transition model and Kalman filter for real time online fault detection and exclusion scheme. The described method allows for the simultaneous detection of multiple faults of different satellites and provides a higher accuracy position. The algorithm used requires only four satellites to work, which is a much better result than traditional solutions. During tests with the on-board LiDAR device, the positioning accuracy was 1.01 m (horizontal) and 6.73 m (3D). The satellite fault detection rate was 100%.
In [129], Ouadine et al. discuss the sensor FDI for the quadrotor UAV. As originality, the authors present the Hammerstein-Wiener model with the artificial neural network combination. They consider sliding mode control of the single input, single output system for the synthesis of control laws in the conditions of nonlinear processes, external disturbances and large uncertainties related to modeling. The used Hammerstein-Wiener model works well in systems equipped with sensors and actuators with nonlinear operating characteristics. The artificial neural network is based on the multilayer perceptron and is used to classify five different abrupt type faults. MATLAB Neural Network Toolbox was used for its implementation. The scaled conjugate gradient backpropagation was used for network training, and a hyperbolic tangent sigmoid was used as the transfer function. The network consists of four input neurons corresponding to the number of residues generated by the Hammerstein-Wiener model, ten neurons in the hidden layer, and five output neurons corresponding to the number of classes. Training lasted 67 epochs and the classification rate reached 100%.
Research on detecting faults in small-scale UAVs was carried out by Mokhtari et al. in [130]. For the detection and isolation task of a different type of actuators and navigation sensors faults in a helicopter in real time, they used an artificial neural network, the weights of which are updated with the extended Kalman filter. The authors have developed an active fault-tolerant control that mitigate faults and false data injection attacks. Various types of malfunctions were investigated on the Yamaha R-50 numerical model: abrupt, incipient, and intermittent faults. The simulations showed the ability of the presented method to increase the reliability and safety of small UAV flights during the failure of the navigation sensor.
In another work [131], Saied et al. similarly to [78] consider the problem of fault detection of navigation sensors. Together, for error detection and error identification, they use two extended informational Kalman filters, the outputs of which are compared using the Bhattacharyya distance metric. This method allows to locate the fault in the accelerometer, gyroscope, magnetometer, GPS module and LiDAR sensor. Real data was used in the experimental tests in the simulator. The operation of the system was checked during GPS fault injection, and then LiDAR fault injection. The techniques used were implemented to build a fault tolerant multi-sensor fusion architecture.
5. Discussion
Fault detection is a fundamental part of fault diagnosis of various processes. In the case of machinery operating in close proximity to humans, it is important for safety reasons. In the case of unmanned aerial systems, it is especially important because such vehicles change their position in space in the event of failure. A flying robot after a malfunction can uncontrollably change its flight trajectory damaging itself or surrounding structures or even falling to the ground posing a risk to human life and health. That is why early failure detection is so important in UAV applications. It is also a critical element of fault-tolerant control, which allows for the reduction of the maintenance costs of such a vehicle, extending the service intervals and reducing the need to replace worn and non-serviced components. Due to the increasing use of drones in a wide range of applications, ensuring the reliability and safety of these vehicles is becoming an increasingly important issue.
This survey article presents an overview of recent research on fault diagnosis in UAVs over the past seven years. Most of the proposed methodologies can be assigned to one of two categories: model-based and data-driven. Primarily the research area of actuator and sensor fault diagnosis was considered, although studies on other subsystems also appear. Some of the most important information from each of the articles considered are included in the tables, which form the core of this study. A brief description of the proposed technique and the results obtained is also made.
Table 7 compares the statistics of the use of individual methods within the prepared review. They cover the most typical types of damage, the most commonly considered UAV designs, and the most popular techniques within each group of model-based and data-based methods. The data are compiled from the 79 papers presented in Table 4, Table 5 and Table 6. The results in parentheses were obtained considering the mixed methods shown in Table 6.
Table 7.
Comparative statistics of the methods used.
The most popular group of ways to detect faults are methods using a mathematical model of an unmanned aerial vehicle. They are used by 45 of the 79 studies described, which is 57%. Additionally, taking into account mixed methods from Table 6 we get a result in which 68% of the authors of all considered solutions use model-based methods. Data-driven methods account for 33% of the research (43% including mixed methods).
Most research is on actuator faults detection techniques. As many as 73% of the papers deal with this topic. Interestingly, they account for as much as 80% of studies using strictly model-based methods (Table 4) and 76% of studies using data-based methods (Table 5). The problem of sensor faults is covered by 53% of papers. This represents 58% and 36% for model- and data-based methods, respectively. Individual results do not add up to 100%, since some methods deal with both actuator and sensor faults. The most commonly considered specific actuators and sensors are shown in the charts in Figure 11. The most popular actuators whose fault detection was studied by the authors of the described articles were the elevator among fixed wing UAVs and the propeller among multirotors. Together, they were concerned with as many as 40% of the articles that dealt with actuators. This was followed by the motor, rudder, and aileron, respectively. Among the sensors, on the other hand, the gyroscope came first. It was considered in as many as 26% of articles treating sensor malfunctions/spoofing attacks. The next most frequently considered sensors were the GPS (or another navigation receiver), accelerometer, pitot tube, and magnetometer.
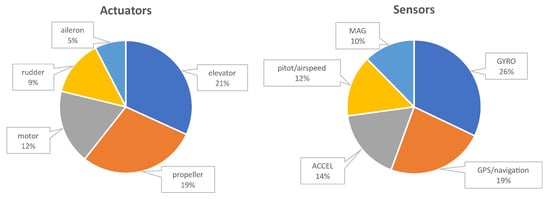
Figure 11.
Individual actuators and sensors faults detected by the following methods presented in the scientific articles. Values indicate the percentage of articles refering to a certain group of drone subsystems that examined a particular actuator or sensor.
It has also analyzed what types of flying vehicles are being considered by researchers. The articles whose authors clearly indicated which UAV design the method they presented was suitable for, as well as those that used a model of a specific flying robot, were taken into account. Among model-based methods, fixed wing designs led the way, accounting for about a quarter of all studies. Among data-based methods, multirotors were studied more often. Among them were the main quadrotor structures, but there were also hexacopters, octorotors, and some less popular structures. Overall, however, both groups of UAVs were considered equally often. Both fixed wing and multirotor UAVs were involved in slightly less than 40% of all articles. The remaining studies either considered less popular solutions like the ducted fan or tilt-rotor UAVs or did not favor any particular design.
Reading articles on fault detection, it’s easy to notice frequently encountered popular methods. A common model-based method is the Kalman filter. It comes in various forms, from its basic, well-known form, through adaptive, two- and three-stage versions, to extended, federated, robust, and mixed forms applied to a specific solution. In total, this type of solution can be found in one in three publications on UAV fault detection. Among data-driven methods, on the other hand, neural networks are becoming increasingly popular. Its various forms and types are the basis of almost a quarter of the solutions in this group.
6. Conclusions
Although UAVs, due to their mobility and relatively low cost, are very often chosen devices, in order to operate them safely, it is necessary to develop a reliable system for detecting various types of malfunctions in their operation. Only with redundant failure protection systems, the drones flying over our heads will be able to become a common sight that will not cause concern.
This review article presents papers on the topic of fault detection in relation to unmanned flying systems. Articles—both review and regular—cover the publication period from January 2016 to August 2022. Table 4, Table 5 and Table 6 are the main part of this article. They include, inter alia, the specification of the type of detected fault, the methods used, and the manner of testing. This statement is a kind of cheat sheet useful when searching for publications on a specific type of UAV, a given element subject to the process of damage, or the detection techniques used. The main division that can be made on the basis of the analysis of the above-mentioned table concerns the detection of actuator and sensor faults. There are tests that try to detect both types of damage. There are those that deal with specific elements of the drone system or disturbances to which the flying robot is subjected during flight. Another division concerns the UAV type. The FD methods described usually apply to multi-rotor systems or fixed wings. There are also studies relating to other structures, e.g., flappers or unusual, hybrid structures, as well as universal methods that work regardless of the type of drone.
Both the results of the tests performed and the way they are carried out, which rarely correspond to real conditions, show that there is still a lot to do in the field of fault detection of flying robots. For drones to operate safely in the human environment, methods are needed that are more reliable, real-time, and independent of defective communication systems. Much remains to be done on the topic of the universality of the techniques used, because in laboratory conditions it is difficult to predict all possible scenarios, and the real problems still surprise designers and researchers dealing with the developing field of unmanned aerial vehicles.
Future work will include the development of an extensive collection of data collected during various phases of flight and various types of damage to unmanned aerial vehicles. Traditional inertial sensors will be applied, the use of which in the sensing process yields very good results and high-efficiency [132]. Readings from less common sensors in detection applications will also be collected. These will include on-board microphones, which also show great potential in the task of early detection of damage to drone actuators [98]. The database prepared in this way will be used to train machine learning methods and verify those trained before. It will benefit studies on UAV damage detection as well as fault-tolerant control.
Author Contributions
Conceptualization, R.P. and W.G.; methodology, R.P.; validation, W.G.; formal analysis, R.P. and W.G.; investigation, R.P.; writing—original draft preparation, R.P.; writing—review and editing, W.G.; visualization, R.P.; supervision, W.G.; project administration, W.G.; funding acquisition, W.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Faculty of Automatic Control, Robotics & Electrical Engineering of Poznan University of Technology grant number 0214/SBAD/0237.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AASKF | Adaptive Augmented State Kalman Filter |
| ACCEL | Accelerometer |
| AFWA | Adaptive Fireworks Algorithm |
| AKF | Adaptive Kalman Filter |
| ANN | Artificial Neural Network |
| AThSKF | Adaptive Three-Stage Kalman Filter |
| ATSEKF | Adaptive Two-Stage Extended Kalman Filter |
| AUC | Area Under Curve |
| Bi-LSTM | Bidirectional Long Short Term Memory |
| BP | BandPower |
| BPNN | Back Propagation Neural Network |
| CF | Command Filter |
| CFA | Continuous Forward Algorithm |
| CITFA | Color Image obtained from the Time-Frequency-Amplitude graph |
| CNN | Convolutional Neural Network |
| CUSUM | Cumulative Sum |
| DFPFS | Differential Flatness Property of Flat Systems |
| DM | Dulmage-Mendelsohn |
| DMVT | Differential Mean Value Theorem |
| DoF | Degrees of Freedom |
| DoS | Denial of Service |
| DT | Decision Tree |
| EIKF | Extended Informational Kalman Filter |
| EKF | Extended Kalman Filter |
| EPMI | Extended Proportional and Multiple Integral |
| FD | Fault Detection |
| FDD | Fault Detection and Diagnosis |
| FDF | Fault Detection Filter |
| FDI | Fault Detection and Isolation |
| FDMAE | Fault Detection Model Acceleration Engine |
| FDP | Fault Detection Parameter |
| FFT | Fast Fourier Transform |
| FKF | Federated Kalman Filter |
| FPGA | Field-Programmable Gate Array |
| FPR | False Positive Rate |
| FTC | Fault-Tolerant Control |
| GA | Genetic Algorithm |
| GDT | Ground Data Terminal |
| GNSS | Global Navigation Satellite Systems |
| GPS | Global Positioning System |
| GSS | Golden Section Search |
| GYRO | Gyroscope |
| HGO | High Gain Observer |
| IBKS | Incremental BacKStepping |
| ICD | Integral Chain Differentiator |
| IMM | Interacting Multiple Model |
| INS | Inertial Navigation System |
| iOE | intelligent Output Estimator |
| KF | Kalman Filter |
| KNN | K Nearest Neighbours |
| KPCA | Kernel Principle Component Analysis |
| LDA | Linear Discriminant Analysis |
| LiDAR | Light Detection and Ranging |
| LightGBM | Light Gradient Boosting Machine |
| LKF | Linear Kalman Filter |
| LMI | Linear Matrix Inequalities |
| LOF | Local Outlier Factor |
| LPV | Linear Parameter-Varying |
| LQ | Linear Quadratic |
| LQR | Linear Quadratic Regulator |
| LSTM | Long Short Term Memory |
| LTI | Linear Time-Invariant |
| MA-DPCA | Moving Average & Dynamic Principal Component Analysis |
| MEMS | Microelectromechanical System |
| MFC | Model Free Control |
| MFCC | Mel Frequency Cepstrum Coefficients |
| ML | Machine Learning |
| MLPNN | Multi Layered Perceptron Neural Network |
| MMAE | Multiple Model Adaptive Estimation |
| MMNSF | Multiple Measurement Noise Scale Factors |
| MSNSF | Multiple System Noise Scale Factors |
| MSO | Minimal Structurally Overdetermined |
| NN | Neural Network |
| NNAS | Neural Network Adaptive Structure |
| OOCSVM | Optimized One-Class Support Vector Machine |
| PCA | Principle Component Analysis |
| PF | Particle Filtering |
| PI | Proportional Integral |
| PSO | Particle Swarm Optimization |
| qLPV | quasi Linear Parameter-Varying |
| RAFO | Robust Adaptive Fault Observer |
| RBFNN | Radial Basis Function Neural Network |
| RDT | Random Decision Tree |
| RF | Residual Filtering |
| RKF | Robust Kalman Filter |
| ROC | Receiver Operating Characteristic |
| RThSCDKF | Robust Three-Stage Central Difference Kalman Filter |
| RThSEKF | Robust Three-Stage Extended Kalman Filter |
| SAC-DM | Signal Analysis based on Chaos using Density of Maxima |
| SADS | Synthetic Air Data System |
| SFUKF | Suboptimal Fading Unscented Kalman Filter |
| SIM | Subspace Identification Method |
| SMC | Sliding Mode Control |
| SPE | Squared Prediction Error |
| SPRT | Sequential Probability Ratio Test |
| STF | Strong Tracking Filtering |
| SVM | Support Vector Machine |
| TDOA | Time Difference Of Arrival |
| TPR | True Positive Rate |
| TSKF | Two-Stage Kalman Filter |
| UAV | Unmanned Aerial Vehicle |
| UIF | Unscented Information Filter |
| UIO | Unknown Input Observer |
| UKF | Unscented Kalman Filter |
| UMMAE | Unscented Multiple Model Adaptive Estimation |
| VTOL | Vertical Take-Off and Landing |
| WDT | Wavelet Discrete Transform |
| WPD | Wavelet Packet Decomposition |
| XGBoost | eXtreme Gradient Boosting |
Appendix A. List of Terms
- Fault—unpermitted deviation of at least one characteristic property of the system
- Failure—permanent interruption of a systems ability to perform a required function under specified operating conditions
- Malfunction—intermittent irregularity in fulfilment of a systems desired function
- Error—deviation between a computed value (of an output variable) and the true, specified or theoretically correct value
- Disturbance—an unknown (and uncontrolled) input acting on a system
- Perturbation—an input acting on a system which results in a temporary departure from a steady state
- Residual—fault indicator, based on deviations between measurements and model-equation-based calculations
- Symptom—change of an observable quantity from normal behavior [30]
- Fault detection—determination of the fault occurrence in a system and time of detection
- Fault isolation—determination of kind, location and time of detection of a fault by evaluating symptoms. Follows fault detection
- Fault identification (and fault estimation)—determination of the size (estimation of the magnitude), severity and time-variant behavior of a fault. Follows fault isolation
- Fault diagnosis—determination of kind, size, location and time of detection of a fault by evaluating symptoms. Follows fault detection. Includes fault detection, isolation and identification [30,133]
References
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Utsav, A.; Abhishek, A.; Suraj, P.; Badhai, R.K. An IoT Based UAV Network For Military Applications. In Proceedings of the 2021 Sixth International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 25–27 March 2021; pp. 122–125. [Google Scholar] [CrossRef]
- Restás, A. Drone Applications Fighting COVID-19 Pandemic—Towards Good Practices. Drones 2022, 6, 15. [Google Scholar] [CrossRef]
- Sibanda, M.; Mutanga, O.; Chimonyo, V.G.P.; Clulow, A.D.; Shoko, C.; Mazvimavi, D.; Dube, T.; Mabhaudhi, T. Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South. Drones 2021, 5, 84. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Doherty, P.; Rudol, P. A UAV search and rescue scenario with human body detection and geolocalization. In AI 2007: Advances in Artificial Intelligence; Orgun, M.A., Thornton, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 1–13. [Google Scholar] [CrossRef]
- Scherer, J.; Yahyanejad, S.; Hayat, S.; Yanmaz, E.; Andre, T.; Khan, A.; Vukadinovic, V.; Bettstetter, C.; Hellwagner, H.; Rinner, B. An autonomous multi-UAV system for search and rescue. In Proceedings of the First Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, Florence, Italy, 18 May 2015; Association for Computing Machinery: New York, NY, USA, 2015. DroNet ’15. pp. 33–38. [Google Scholar] [CrossRef]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomat. Nat. Hazards Risk 2017, 8, 18–33. [Google Scholar] [CrossRef]
- Estrada, M.A.R.; Ndoma, A. The uses of unmanned aerial vehicles –UAV’s- (or drones) in social logistic: Natural disasters response and humanitarian relief aid. Procedia Comput. Sci. 2019, 149, 375–383. [Google Scholar] [CrossRef]
- Quaritsch, M.; Kruggl, K.; Wischounig-Strucl, D.; Bhattacharya, S.; Shah, M.; Rinner, B. Networked UAVs as aerial sensor network for disaster management applications. Elektrotechnik und Informationstechnik 2010, 127, 56–63. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 1: A review of progress and challenges. J. Unmanned Veh. Syst. 2014, 2, 69–85. [Google Scholar] [CrossRef]
- Tuyishimire, E.; Bagula, A.; Rekhis, S.; Boudriga, N. Cooperative data muling from ground sensors to base stations using UAVs. In Proceedings of the 2017 IEEE Symposium on Computers and Communications (ISCC), Heraklion, Greece, 3–6 July 2017; pp. 35–41. [Google Scholar] [CrossRef]
- Deng, C.; Wang, S.; Huang, Z.; Tan, Z.; Liu, J. Unmanned Aerial Vehicles for Power Line Inspection: A Cooperative Way in Platforms and Communications. J. Commun. 2014, 9, 687–692. [Google Scholar] [CrossRef]
- Gheisari, M.; Irizarry, J.; Walker, B. UAS4SAFETY: The Potential of Unmanned Aerial Systems for Construction Safety Applications. In Proceedings of the ASCE 2014, Atlanta, Georgia, 19–21 May 2014; pp. 1801–1810. [Google Scholar] [CrossRef]
- Liu, P.; Chen, A.; Huang, Y.N.; Han, J.Y.; Lai, J.S.; Kang, S.C.; Wu, T.H.R.; Wen, M.C.; Tsai, M.H. A review of rotorcraft Unmanned Aerial Vehicle (UAV) developments and applications in civil engineering. Smart Struct. Syst. 2014, 13, 1065–1094. [Google Scholar] [CrossRef]
- Kazmi, W.; Bisgaard, M.; Garcia-Ruiz, F.; Hansen, K.; la Cour-Harbo, A. Adaptive Surveying and Early Treatment of Crops with a Team of Autonomous Vehicles. In Proceedings of the 5th European Conference on Mobile Robots ECMR 2011, Örebro, Sweden, 7–9 September 2011; pp. 253–258. [Google Scholar]
- Garcia-Ruiz, F.; Sankaran, S.; Maja, J.M.; Lee, W.S.; Rasmussen, J.; Ehsani, R. Comparison of two aerial imaging platforms for identification of Huanglongbing-infected citrus trees. Comput. Electron. Agric. 2013, 91, 106–115. [Google Scholar] [CrossRef]
- Gonzalez-dugo, V.; Zarco-Tejada, P.; Nicolás, E.; Nortes, P.; Alarcón, J.; Intrigliolo, D.; Fereres, E. Using high resolution UAV thermal imagery to assess the variability in the water status of five fruit tree species within a commercial orchard. Precis. Agric. 2013, 14, 660–678. [Google Scholar] [CrossRef]
- Wilson, A.N.; Kumar, A.; Jha, A.; Cenkeramaddi, L.R. Embedded Sensors, Communication Technologies, Computing Platforms and Machine Learning for UAVs: A Review. IEEE Sens. J. 2022, 22, 1807–1826. [Google Scholar] [CrossRef]
- Novotňák, J.; Fiľko, M.; Lipovský, P.; Šmelko, M. Design of the System for Measuring UAV Parameters. Drones 2022, 6, 213. [Google Scholar] [CrossRef]
- Liu, F.; Shan, J.; Xiong, B.; Fang, Z. A Real-Time and Multi-Sensor-Based Landing Area Recognition System for UAVs. Drones 2022, 6, 118. [Google Scholar] [CrossRef]
- Ahmed, F.; Jenihhin, M. A Survey on UAV Computing Platforms: A Hardware Reliability Perspective. Sensors 2022, 22, 6286. [Google Scholar] [CrossRef]
- Alrayes, F.S.; Alotaibi, S.S.; Alissa, K.A.; Maashi, M.; Alhogail, A.; Alotaibi, N.; Mohsen, H.; Motwakel, A. Artificial Intelligence-Based Secure Communication and Classification for Drone-Enabled Emergency Monitoring Systems. Drones 2022, 6, 222. [Google Scholar] [CrossRef]
- Friedrich, C.; Lechler, A.; Verl, A. Autonomous Systems for Maintenance Tasks – Requirements and Design of a Control Architecture. Procedia Technol. 2014, 15, 596–605. [Google Scholar] [CrossRef][Green Version]
- Severson, K.; Chaiwatanodom, P.; Braatz, R.D. Perspectives on process monitoring of industrial systems. Annu. Rev. Control 2016, 42, 190–200. [Google Scholar] [CrossRef]
- Hasan, A.; Johansen, T.A. Model-Based Actuator Fault Diagnosis in Multirotor UAVs. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 1017–1024. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Di Rito, G.; Previdi, F. Fault Diagnosis and Condition Monitoring Approaches. In Electro-Mechanical Actuators for the More Electric Aircraft; Springer International Publishing: Cham, Switzerland, 2021; pp. 87–117. [Google Scholar] [CrossRef]
- Isermann, R.; Ballé, P. Trends in the application of model-based fault detection and diagnosis of technical processes. Control Eng. Pract. 1997, 5, 709–719. [Google Scholar] [CrossRef]
- Isermann, R. Fault-Diagnosis Systems: An Introduction from Fault Detection to Fault Tolerance; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005. [Google Scholar] [CrossRef]
- Isermann, R. Fault-Diagnosis Applications; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef]
- Vural, S.Y.; Hacızade, C. Sensor/actuator fault detection, isolation and accommodation applied to UAV model. J. Aeronaut. Space Technol. 2016, 9, 1–12. [Google Scholar]
- Amorim, A. Architecture of the Battery Fault Detection System of the AUV Antares; Internal Report; College of Technology of Jahu: Jahu, Brazil, 2015. [Google Scholar] [CrossRef]
- Făgărăşan, I.; Iliescu, S.S.; Hossu, D. A comparation of model and signal based fault detection methods. Proc. Rom. Acad. Ser. A 2008, 9, 243–251. [Google Scholar]
- Wang, B.; Liu, D.; Peng, Y.; Peng, X. Multivariate regression-based fault detection and recovery of UAV flight data. IEEE Trans. Instrum. Meas. 2019, 69, 3527–3537. [Google Scholar] [CrossRef]
- Bowkett, M.; Thanapalan, K.; Constant, E. Failure detection of composites with control system corrective response in drone system applications. Computers 2018, 7, 23. [Google Scholar] [CrossRef]
- Blanke, M.; Hansen, S. Towards self-tuning residual generators for UAV control surface fault diagnosis. In Proceedings of the 2013 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 9–11 October 2013; pp. 37–42. [Google Scholar] [CrossRef]
- Bošković, J.D.; Mehra, R.K. Failure Detection, Identification and Reconfiguration in Flight Control. In Fault Diagnosis and Fault Tolerance for Mechatronic Systems: Recent Advances; Springer: Berlin/Heidelberg, Germany, 2003; Chapter 1; pp. 129–167. [Google Scholar] [CrossRef]
- Alwi, H.; Edwards, C.; Tan, C.P. Fault Detection and Fault-Tolerant Control Using Sliding Modes; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef]
- De Silva, S.C.; Phlernjai, M.; Rianmora, S.; Ratsamee, P. Inverted Docking Station: A Conceptual Design for a Battery-Swapping Platform for Quadrotor UAVs. Drones 2022, 6, 56. [Google Scholar] [CrossRef]
- Sheng, H.; Zhang, C.; Xiang, Y. Mathematical Modeling and Stability Analysis of Tiltrotor Aircraft. Drones 2022, 6, 92. [Google Scholar] [CrossRef]
- Cacciatori, L.; Brignoli, C.; Mele, B.; Gattere, F.; Monti, C.; Quadrio, M. Drag Reduction by Riblets on a Commercial UAV. Appl. Sci. 2022, 12, 5070. [Google Scholar] [CrossRef]
- Dong, X.; Wang, Z.; Liu, F.; Li, S.; Fei, F.; Li, D.; Tu, Z. Visual-Inertial Cross Fusion: A Fast and Accurate State Estimation Framework for Micro Flapping Wing Rotors. Drones 2022, 6, 90. [Google Scholar] [CrossRef]
- aeroMIND. Budowa Drona. 2014. Available online: https://aeromind.pl/Budowa-drona-ccms-pol-52.html (accessed on 29 August 2022). (In Polish).
- Khayat, M. What Is the Difference between a Survey Paper and a Systematic Review Paper? 2021. Available online: https://www.editage.com/insights/what-is-the-difference-between-a-survey-paper-and-a-systematic-review-paper (accessed on 26 September 2022).
- Shraim, H.; Awada, A.; Youness, R. A survey on quadrotors: Configurations, modeling and identification, control, collision avoidance, fault diagnosis and tolerant control. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 14–33. [Google Scholar] [CrossRef]
- Emer, N.; Özbek, N. A survey on Kalman filtering for unmanned aerial vehicles: Recent trends, applications, and challenges. In Proceedings of the International Conference on Engineering Technologies (ICENTE’20), Konya, Turkey, 19–21 November 2020; pp. 168–173. [Google Scholar]
- Guo, L.; Yu, X.; Zhang, X.; Zhang, Y. Safety control system technologies for UAVs: Review and prospect. Sci. Sin. Informationis 2020, 50, 184–194. [Google Scholar] [CrossRef]
- Fourlas, G.K.; Karras, G.C. A Survey on Fault Diagnosis and Fault-Tolerant Control Methods for Unmanned Aerial Vehicles. Machines 2021, 9, 197. [Google Scholar] [CrossRef]
- Mohan, M.; Richardson, G.; Gopan, G.; Aghai, M.M.; Bajaj, S.; Galgamuwa, G.A.P.; Vastaranta, M.; Arachchige, P.S.P.; Amorós, L.; Corte, A.P.D.; et al. UAV-Supported Forest Regeneration: Current Trends, Challenges and Implications. Remote Sens. 2021, 13, 2596. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Symagulov, A.; Kuchin, Y.; Zaitseva, E.; Bekbotayeva, A.; Yakunin, K.; Assanov, I.; Levashenko, V.; Popova, Y.; Akzhalova, A.; et al. Review of Some Applications of Unmanned Aerial Vehicles Technology in the Resource-Rich Country. Appl. Sci. 2021, 11, 10171. [Google Scholar] [CrossRef]
- Smith, M.L.; Smith, L.N.; Hansen, M.F. The quiet revolution in machine vision—A state-of-the-art survey paper, including historical review, perspectives, and future directions. Comput. Ind. 2021, 130, 103472. [Google Scholar] [CrossRef]
- Agarwal, A.; Kumar, S.; Singh, D. Development of Neural Network Based Adaptive Change Detection Technique for Land Terrain Monitoring with Satellite and Drone Images. Def. Sci. J. 2019, 69, 474–480. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, J. Bibliographical review on reconfigurable fault-tolerant control systems. Annu. Rev. Control 2008, 32, 229–252. [Google Scholar] [CrossRef]
- Abbaspour, A.; Aboutalebi, P.; Yen, K.K.; Sargolzaei, A. Neural adaptive observer-based sensor and actuator fault detection in nonlinear systems: Application in UAV. ISA Trans. 2017, 67, 317–329. [Google Scholar] [CrossRef]
- Fazal, Q.; Liaquat, M.; Iftikhar, M. Robust fault tolerant control of an unmanned aerial vehicle in the presence of actuator faults. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 757–763. [Google Scholar] [CrossRef]
- Gu, Y.; Gross, J.N.; Rhudy, M.B.; Lassak, K. A fault-tolerant multiple sensor fusion approach applied to UAV attitude estimation. Int. J. Aerosp. Eng. 2016, 2016, 6217428. [Google Scholar] [CrossRef]
- Hajiyev, C. An Innovation Approach Based Sensor Fault Detection and Isolation. In Proceedings of the 20th IFAC Symposium on Automatic Control in AerospaceACA, Sherbrooke, QC, Canada, 21–25 August 2016; Volume 49, pp. 420–425. [Google Scholar] [CrossRef]
- Herdjunanto, S. Actuator fault signal isolation of an unmanned aerial vehicle (UAV) quadrotor based on detection filter. In Proceedings of the 2016 8th International Conference on Information Technology and Electrical Engineering (ICITEE), Yogyakarta, Indonesia, 5–6 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, L.; Ma, Y.; Xu, B.; Xiang, C.; Yang, X. Fault detection and isolation based on UKFs for a novel ducted fan UAV. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 212–218. [Google Scholar] [CrossRef]
- Papaliakos, G.Z.; Kyriakopoulos, K.J. On the selection of calculable residual generators for UAV fault diagnosis. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 396–401. [Google Scholar] [CrossRef]
- Tan, J.; Xu, F.; Wang, X.; Mi, Y.; Liang, B. Set-theoretic robust FD of UAV nonlinear longitudinal motion under discrete-time quasi-LPV framework. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 6684–6689. [Google Scholar] [CrossRef]
- Witczak, P.; Pazera, M.; Witczak, M.; Korbicz, J.; Theilliol, D. Thrust balance estimation of an unmanned aerial vehicle: Application to fault detection. In Proceedings of the 2016 3rd Conference on Control and Fault-Tolerant Systems (SysTol), Barcelona, Spain, 7–9 September 2016; pp. 15–20. [Google Scholar] [CrossRef]
- Żugaj, M.; Bibik, P.; Jacewicz, M. UAV aircraft model for control system failures analysis. J. Theor. Appl. Mech. 2016, 54, 1405–1415. [Google Scholar] [CrossRef]
- Guo, D.; Zhong, M.; Zhou, D. Multisensor data-fusion-based approach to airspeed measurement fault detection for unmanned aerial vehicles. IEEE Trans. Instrum. Meas. 2017, 67, 317–327. [Google Scholar] [CrossRef]
- Park, S. Wind and airspeed error estimation with GPS and pitot-static system for small UAV. Int. J. Aeronaut. Space Sci. 2017, 18, 344–351. [Google Scholar] [CrossRef]
- Yi, Y.; Zhang, Y. Fault diagnosis of an unmanned quadrotor helicopter based on particle filter. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1432–1437. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhang, W.; Zhang, Y. Sensor Fault Diagnosis for Unmanned Quadrotor Helicopter via Adaptive Two-Stage Extended Kalman Filter. In Proceedings of the 2017 International Conference on Sensing, Diagnostics, Prognostics, and Control (SDPC), Shanghai, China, 16–18 August 2017; pp. 493–498. [Google Scholar] [CrossRef]
- Bauer, P.; Venkataraman, R.; Vanek, B.; Seiler, P.J.; Bokor, J. Fault detection and basic in-flight reconfiguration of a small UAV equipped with elevons. IFAC-PapersOnLine 2018, 51, 600–607. [Google Scholar] [CrossRef]
- D’Amato, E.; Mattei, M.; Notaro, I.; Scordamaglia, V. UAV sensor FDI in duplex attitude estimation architectures using a set-based approach. IEEE Trans. Instrum. Meas. 2018, 67, 2465–2475. [Google Scholar] [CrossRef]
- Guo, D.; Wang, Y.; Zhong, M.; Zhao, Y. Fault detection and isolation for Unmanned Aerial Vehicle sensors by using extended PMI filter. IFAC-PapersOnLine 2018, 51, 818–823. [Google Scholar] [CrossRef]
- Hajiyev, C. An Innovation Approach Based Model Change Detection Applied to UAV Actuator/Surface FDI. IFAC-PapersOnLine 2018, 51, 77–82. [Google Scholar] [CrossRef]
- Lee, J.; Shin, H.; Kim, T. Optimal combination of fault detection and isolation methods of integrated navigation algorithm for UAV. Int. J. Aeronaut. Space Sci. 2018, 19, 694–710. [Google Scholar] [CrossRef]
- Ma, H.J.; Liu, Y.; Li, T.; Yang, G.H. Nonlinear high-gain observer-based diagnosis and compensation for actuator and sensor faults in a quadrotor unmanned aerial vehicle. IEEE Trans. Ind. Inform. 2018, 15, 550–562. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhang, Y.; Zhang, W.; Zuo, J.; Zhan, H. Robust actuator fault detection and diagnosis for a quadrotor UAV with external disturbances. IEEE Access 2018, 6, 48169–48180. [Google Scholar] [CrossRef]
- Demircan, M.; Kasnakoğlu, C. Aileron Locking Fault Detection Based on Extended Kalman Filter for UAV. In Proceedings of the 3rd International Conference on Vision, Image and Signal Processing, Vancouver, BC, Canada, 26–28 August 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Guzmán-Rabasa, J.A.; López-Estrada, F.R.; González-Contreras, B.M.; Valencia-Palomo, G.; Chadli, M.; Perez-Patricio, M. Actuator fault detection and isolation on a quadrotor unmanned aerial vehicle modeled as a linear parameter-varying system. Meas. Control 2019, 52, 1228–1239. [Google Scholar] [CrossRef]
- Rotondo, D.; Cristofaro, A.; Johansen, T.A.; Nejjari, F.; Puig, V. Robust fault and icing diagnosis in unmanned aerial vehicles using LPV interval observers. Int. J. Robust Nonlinear Control 2019, 29, 5456–5480. [Google Scholar] [CrossRef]
- Saied, M.; Mahairy, T.; Francis, C.; Shraim, H.; Mazeh, H.; El Rafei, M. Differential Flatness-Based Approach for Sensors and Actuators Fault Diagnosis of a Multirotor UAV. IFAC-PapersOnLine 2019, 52, 831–836. [Google Scholar] [CrossRef]
- Venkataraman, R.; Bauer, P.; Seiler, P.; Vanek, B. Comparison of fault detection and isolation methods for a small unmanned aircraft. Control Eng. Pract. 2019, 84, 365–376. [Google Scholar] [CrossRef]
- Wang, R.; Zhao, C.; Bai, Y.; Du, W.; Wang, J. An actuator fault detection and reconstruction scheme for hex rotor unmanned aerial vehicle. IEEE Access 2019, 7, 93937–93951. [Google Scholar] [CrossRef]
- Xu, C.; Jia, H.; Chen, Z. Simultaneous Robust Control and Sensor Fault Detection for a Ducted Coaxial-Rotor UAV. IEEE Access 2019, 7, 167739–167753. [Google Scholar] [CrossRef]
- Zhong, W.; Xin, C. Fault detection of UAV fault based on a SFUKF. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 563, p. 052099. [Google Scholar] [CrossRef]
- Cristofaro, A.; Rotondo, D.; Johansen, T.A. An unknown input observer-based framework for fault and icing detection and accommodation in overactuated unmanned aerial vehicles. In Fault Diagnosis and Fault-Tolerant Control of Robotic and Autonomous Systems; Control, Robotics & Sensors; Institution of Engineering and Technology: London, UK, 2020; pp. 67–92. [Google Scholar] [CrossRef]
- Faraji, A.; Nejati, Z.; Abedi, M. Actuator Faults Estimation for a Helicopter UAV in the Presence of Disturbances. J. Control Autom. Electr. Syst. 2020, 31, 1153–1164. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, Q.; Chen, J. EKF-based actuator fault detection and diagnosis method for tilt-rotor unmanned aerial vehicles. Math. Probl. Eng. 2020, 2020, 8019017. [Google Scholar] [CrossRef]
- Hajiyev, C.; Cilden-Guler, D.; Hacizade, U. Two-Stage Kalman Filter for Fault Tolerant Estimation of Wind Speed and UAV Flight Parameters. Meas. Sci. Rev. 2020, 20, 35–42. [Google Scholar] [CrossRef]
- Zhang, H.; Gao, Q.; Pan, F. An Online Fault Diagnosis Method For Actuators Of Quadrotor UAV With Novel Configuration Based On IMM. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 618–623. [Google Scholar] [CrossRef]
- Zuo, L.; Yao, L.; Kang, Y. UIO based sensor fault diagnosis and compensation for quadrotor UAV. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 4052–4057. [Google Scholar] [CrossRef]
- D’Amato, E.; Nardi, V.A.; Notaro, I.; Scordamaglia, V. A Particle Filtering Approach for Fault Detection and Isolation of UAV IMU Sensors: Design, Implementation and Sensitivity Analysis. Sensors 2021, 21, 3066. [Google Scholar] [CrossRef]
- Fu, X.; Geng, X. Fault Estimation and Robust Fault-tolerant Control for Singular Markov Switching Systems with Mixed Time-Delays and UAV Applications. J. Control. Eng. Appl. Inform. 2021, 23, 53–66. [Google Scholar]
- Maqsood, H.; Taimoor, M.; Ullah, Z.; Ali, N.; Sohail, M. Novel Sensor Fault Detection and Isolation for an Unmanned Aerial Vehicle. In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021; pp. 486–493. [Google Scholar] [CrossRef]
- Miao, Q.; Wei, J.; Wang, J.; Chen, Y. Fault Diagnosis Algorithm Based on Adjustable Nonlinear PI State Observer and Its Application in UAV Fault Diagnosis. Algorithms 2021, 14, 119. [Google Scholar] [CrossRef]
- Nejati, Z.; Faraji, A.; Abedi, M. Robust Three Stage Central Difference Kalman Filter for Helicopter Unmanned Aerial Vehicle Actuators Fault Estimation. Int. J. Eng. 2021, 34, 1290–1296. [Google Scholar] [CrossRef]
- Sun, K.; Gebre-Egziabher, D. Air data fault detection and isolation for small UAS using integrity monitoring framework. Navigation 2021, 68, 577–600. [Google Scholar] [CrossRef]
- Cao, L.; Yang, X.; Wang, G.; Liu, Y.; Hu, Y. Fault detection based on extended state observer and interval observer for UAVs. Aircr. Eng. Aerosp. Technol. 2022. ahead-of-print. [Google Scholar] [CrossRef]
- Gai, W.; Li, S.; Zhang, J.; Zheng, Y.; Zhong, M. Dynamic Event-Triggered Hi/H∞ Optimization Approach to Fault Detection for Unmanned Aerial Vehicles. IEEE Trans. Instrum. Meas. 2022, 71, 1–11. [Google Scholar] [CrossRef]
- Hamadi, H.; Lussier, B.; Fantoni, I.; Francis, C. Data fusion fault tolerant strategy for a quadrotor UAV under sensors and software faults. ISA Trans. 2022, 129, 520–539. [Google Scholar] [CrossRef] [PubMed]
- Bondyra, A.; Kołodziejczak, M.; Kulikowski, R.; Giernacki, W. An Acoustic Fault Detection and Isolation System for Multirotor UAV. Energies 2022, 15, 3955. [Google Scholar] [CrossRef]
- Guo, K.; Liu, L.; Shi, S.; Liu, D.; Peng, X. UAV sensor fault detection using a classifier without negative samples: A local density regulated optimization algorithm. Sensors 2019, 19, 771. [Google Scholar] [CrossRef]
- Al Younes, Y.; Rabhi, A.; Noura, H.; El Hajjaji, A. Sensor fault diagnosis and fault tolerant control using intelligent-output-estimator applied on quadrotor UAV. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1117–1123. [Google Scholar] [CrossRef]
- Li, M.; Li, G.; Zhong, M. A data driven fault detection and isolation scheme for UAV flight control system. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 6778–6783. [Google Scholar] [CrossRef]
- Ortiz-Torres, G.; Lopez-Estrada, F.R.; Reyes-Reyes, J.; García-Beltrán, C.; Theilliol, D. An actuator fault detection and isolation method design for planar vertical take-off and landing unmanned aerial vehicle modelled as a qLPV system. IFAC-PapersOnLine 2016, 49, 272–277. [Google Scholar] [CrossRef]
- Baskaya, E.; Bronz, M.; Delahaye, D. Fault detection & diagnosis for small UAVs via machine learning. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Bondyra, A.; Gasior, P.; Gardecki, S.; Kasiński, A. Fault diagnosis and condition monitoring of UAV rotor using signal processing. In Proceedings of the 2017 Signal Processing: Algorithms, Architectures, Arrangements, and Applications (SPA), Poznan, Poland, 20–22 September 2017; pp. 233–238. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, C.; Zhang, Q.; Hu, X. UAV fault detection based on GA-BP neural network. In Proceedings of the 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Hefei, China, 19–21 May 2017; pp. 806–811. [Google Scholar] [CrossRef]
- Chen, Y.; Hu, X.; Zhang, Q.; Zhang, C. Research on multi-classification method of UAV sensor fault based on wavelet entropy and AFWA-BP neural network. In Proceedings of the 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Hefei, China, 19–21 May 2017; pp. 837–842. [Google Scholar] [CrossRef]
- Saied, M.; Lussier, B.; Fantoni, I.; Shraim, H.; Francis, C. Fault Diagnosis and Fault-Tolerant Control of an Octorotor UAV using motors speeds measurements. IFAC-PapersOnLine 2017, 50, 5263–5268. [Google Scholar] [CrossRef]
- Bondyra, A.; Gasior, P.; Gardecki, S.; Kasinski, A.J. Development of the sensory network for the vibration-based fault detection and isolation in the multirotor UAV propulsion system. In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Porto, Portugal, 29–31 July 2018; pp. 112–119. [Google Scholar] [CrossRef]
- Olyaei, M.H.; Jalali, H.; Noori, A.; Eghbal, N. Fault detection and identification on UAV system with CITFA algorithm based on deep learning. In Proceedings of the Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 8–10 May 2018; pp. 988–993. [Google Scholar] [CrossRef]
- Al Younes, Y.; Noura, H.; Rabhi, A.; El Hajjaji, A. Actuator fault-diagnosis and fault-tolerant-control using intelligent-output-estimator applied on quadrotor UAV. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 413–420. [Google Scholar] [CrossRef]
- Benini, A.; Ferracuti, F.; Monteriù, A.; Radensleben, S. Fault detection of a VTOL UAV using acceleration measurements. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 3990–3995. [Google Scholar] [CrossRef]
- Iannace, G.; Ciaburro, G.; Trematerra, A. Fault diagnosis for UAV blades using artificial neural network. Robotics 2019, 8, 59. [Google Scholar] [CrossRef]
- Ignatyev, D.I.; Shin, H.S.; Tsourdos, A. Two-layer fault detection for incremental flight control of fixed-wing UAV. In Proceedings of the 2019 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), Cranfield, UK, 25–27 November 2019; pp. 227–236. [Google Scholar] [CrossRef]
- Kantue, P.; Pedro, J.O. Integrated Fault Detection and Diagnosis of an Unmanned Aerial Vehicle using Time Difference of Arrival. In Proceedings of the 2020 24th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 8–10 October 2020; pp. 336–342. [Google Scholar] [CrossRef]
- Sadhu, V.; Zonouz, S.; Pompili, D. On-board deep-learning-based unmanned aerial vehicle fault cause detection and identification. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 5255–5261. [Google Scholar] [CrossRef]
- Wang, B.; Peng, X.; Jiang, M.; Liu, D. Real-time fault detection for UAV based on model acceleration engine. IEEE Trans. Instrum. Meas. 2020, 69, 9505–9516. [Google Scholar] [CrossRef]
- Altinors, A.; Yol, F.; Yaman, O. A sound based method for fault detection with statistical feature extraction in UAV motors. Appl. Acoust. 2021, 183, 108325. [Google Scholar] [CrossRef]
- Park, K.H.; Park, E.; Kim, H.K. Unsupervised Fault Detection on Unmanned Aerial Vehicles: Encoding and Thresholding Approach. Sensors 2021, 21, 2208. [Google Scholar] [CrossRef] [PubMed]
- Souza, J.S.; Bezerril, M.C.; Silva, M.A.; Veras, F.C.; Lima-Filho, A.; Ramos, J.G.; Brito, A.V. Motor speed estimation and failure detection of a small UAV using density of maxima. Front. Inf. Technol. Electron. Eng. 2021, 22, 1002–1009. [Google Scholar] [CrossRef]
- Zheng, K.; Jia, G.; Yang, L.; Wang, J. A Compound Fault Labeling and Diagnosis Method Based on Flight Data and BIT Record of UAV. Appl. Sci. 2021, 11, 5410. [Google Scholar] [CrossRef]
- Zhang, X.; Luo, H.; Li, K.; Kaynak, O. Time-Domain Frequency Estimation With Application to Fault Diagnosis of the Unmanned Aerial Vehicles’ Blade Damage. IEEE Trans. Ind. Electron. 2022, 69, 5257–5266. [Google Scholar] [CrossRef]
- Baskaya, E.; Bronz, M.; Delahaye, D. Flight simulation of a MAKO UAV for use in data-driven fault diagnosis. In Proceedings of the IMAV 2017, 9th International Microair Vehicle Conference, Toulouse, France, 18–21 September 2017; pp. 103–110. [Google Scholar]
- Park, K.H.; Park, E.; Kim, H.K. Unsupervised Intrusion Detection System for Unmanned Aerial Vehicle with Less Labeling Effort. In Information Security Applications. WISA 2020; You, I., Ed.; Springer International Publishing: Cham, Switzerland, 2020; pp. 45–58. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, X.; Xiao, X.; Pei, C. Design of a fault detection and diagnose system for intelligent unmanned aerial vehicle navigation system. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 2170–2176. [Google Scholar] [CrossRef]
- Abbaspour, A.; Yen, K.K.; Noei, S.; Sargolzaei, A. Detection of Fault Data Injection Attack on UAV Using Adaptive Neural Network. Procedia Comput. Sci. 2016, 95, 193–200. [Google Scholar] [CrossRef]
- Fan, H.; Fang, H.; Dong, Y.; Shi, H.; Ren, S. UAV engine fault and diagnosis with parameter models based on telemetry data. In Proceedings of the 2017 Prognostics and System Health Management Conference (PHM-Harbin), Harbin, China, 9–12 July 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Cao, L.; Tang, Y.; Zhang, G. Adaptive observer-based fault detection and active tolerant control for unmanned aerial vehicles attitude system. IFAC-PapersOnLine 2019, 52, 47–52. [Google Scholar] [CrossRef]
- Cheng, Q.; Sun, R.; Wang, J. A new historical data based GNSS fault detection and exclusion algorithm for UAV positioning. In Proceedings of the 2020 IEEE 2nd International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Weihai, China, 14–16 October 2020; pp. 1144–1149. [Google Scholar] [CrossRef]
- Ouadine, A.Y.; Mjahed, M.; Ayad, H.; El Kari, A. UAV quadrotor fault detection and isolation using artificial neural network and Hammerstein-Wiener model. Stud. Inform. Control 2020, 29, 317–328. [Google Scholar] [CrossRef]
- Mokhtari, S.; Abbaspour, A.; Yen, K.K.; Sargolzaei, A. Neural Network-Based Active Fault-Tolerant Control Design for Unmanned Helicopter with Additive Faults. Remote Sens. 2021, 13, 2396. [Google Scholar] [CrossRef]
- Saied, M.; Tabikh, A.R.; Francis, C.; Hamadi, H.; Lussier, B. An Informational Approach for Fault Tolerant Data Fusion Applied to a UAV’s Attitude, Altitude, and Position Estimation. IEEE Sens. J. 2021, 21, 27766–27778. [Google Scholar] [CrossRef]
- Puchalski, R.; Bondyra, A.; Giernacki, W.; Zhang, Y. Actuator fault detection and isolation system for multirotor unmanned aerial vehicles. In Proceedings of the 2022 26th International Conference on Methods and Models in Automation and Robotics (MMAR), Międzyzdroje, Poland, 22–25 August 2022; pp. 364–369. [Google Scholar] [CrossRef]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M. Introduction to Diagnosis and Fault-Tolerant Control; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1–35. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).