


Accuracy Assessment of Direct Georeferencing for Photogrammetric Applications Based on UAS-GNSS for High Andean Urban Environments
 ,
,  ,
,  ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
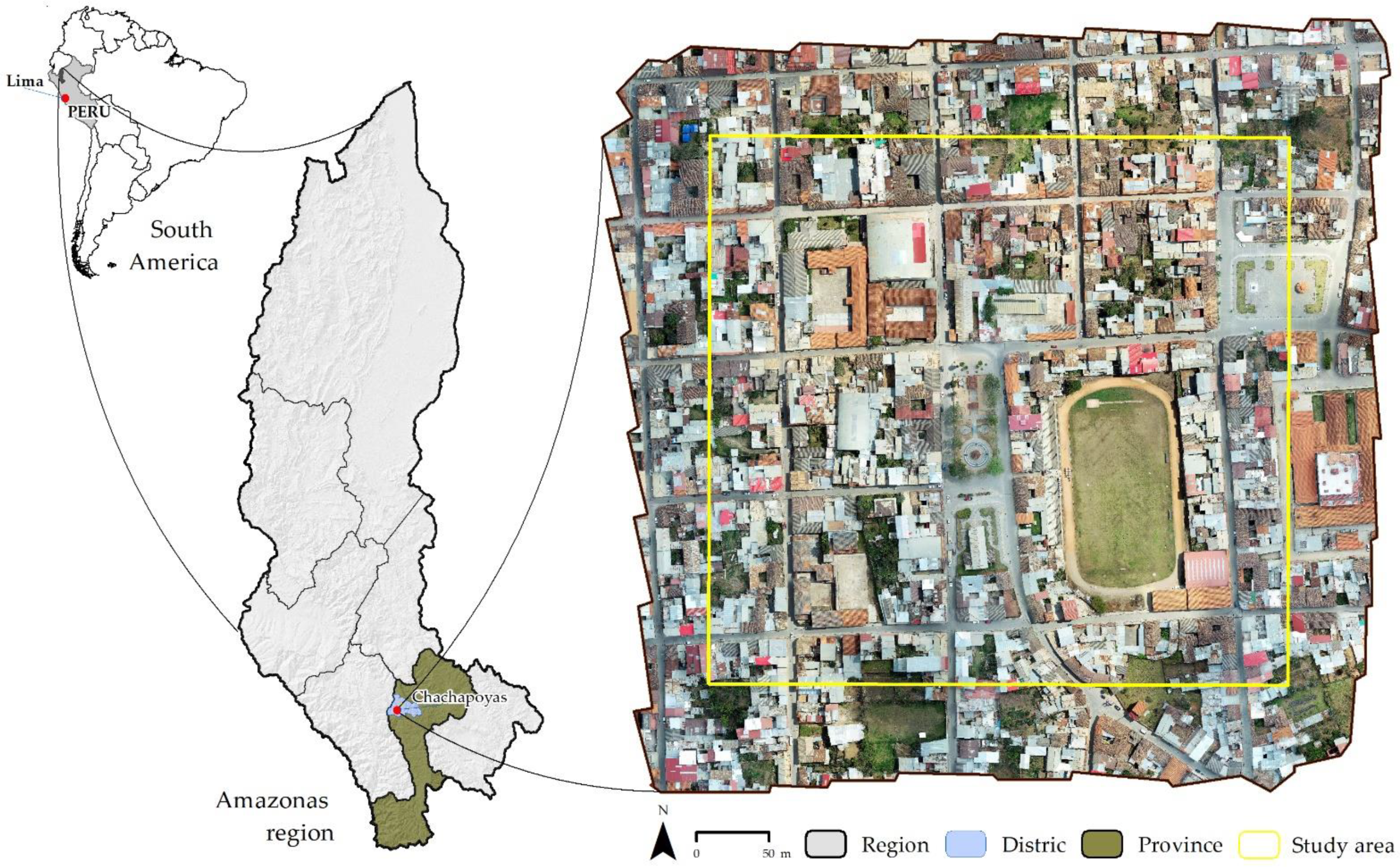
2.1. Study Area
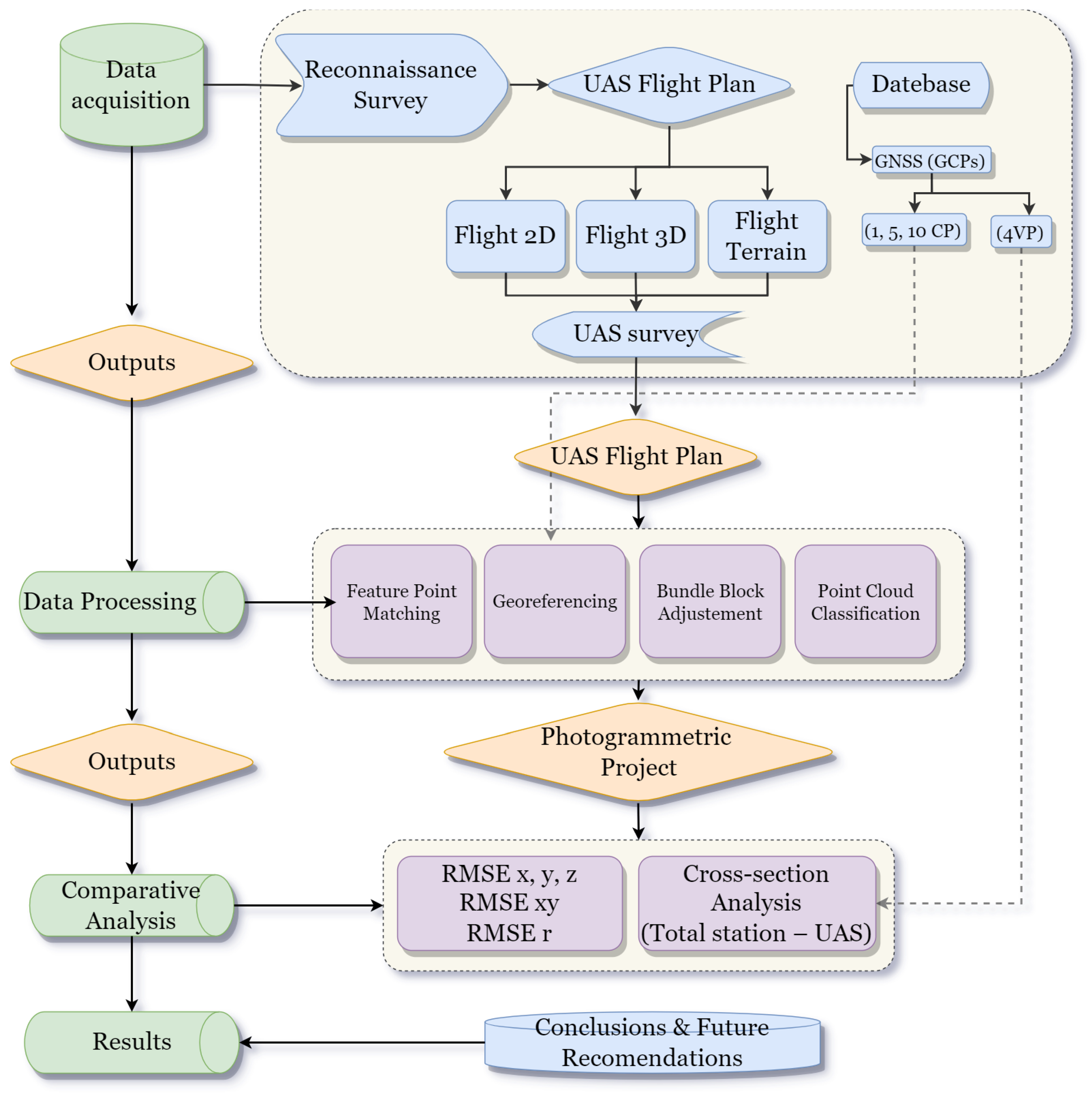
2.2. Data Acquisition
2.2.1. GNSS Survey
2.2.2. UAS Planning
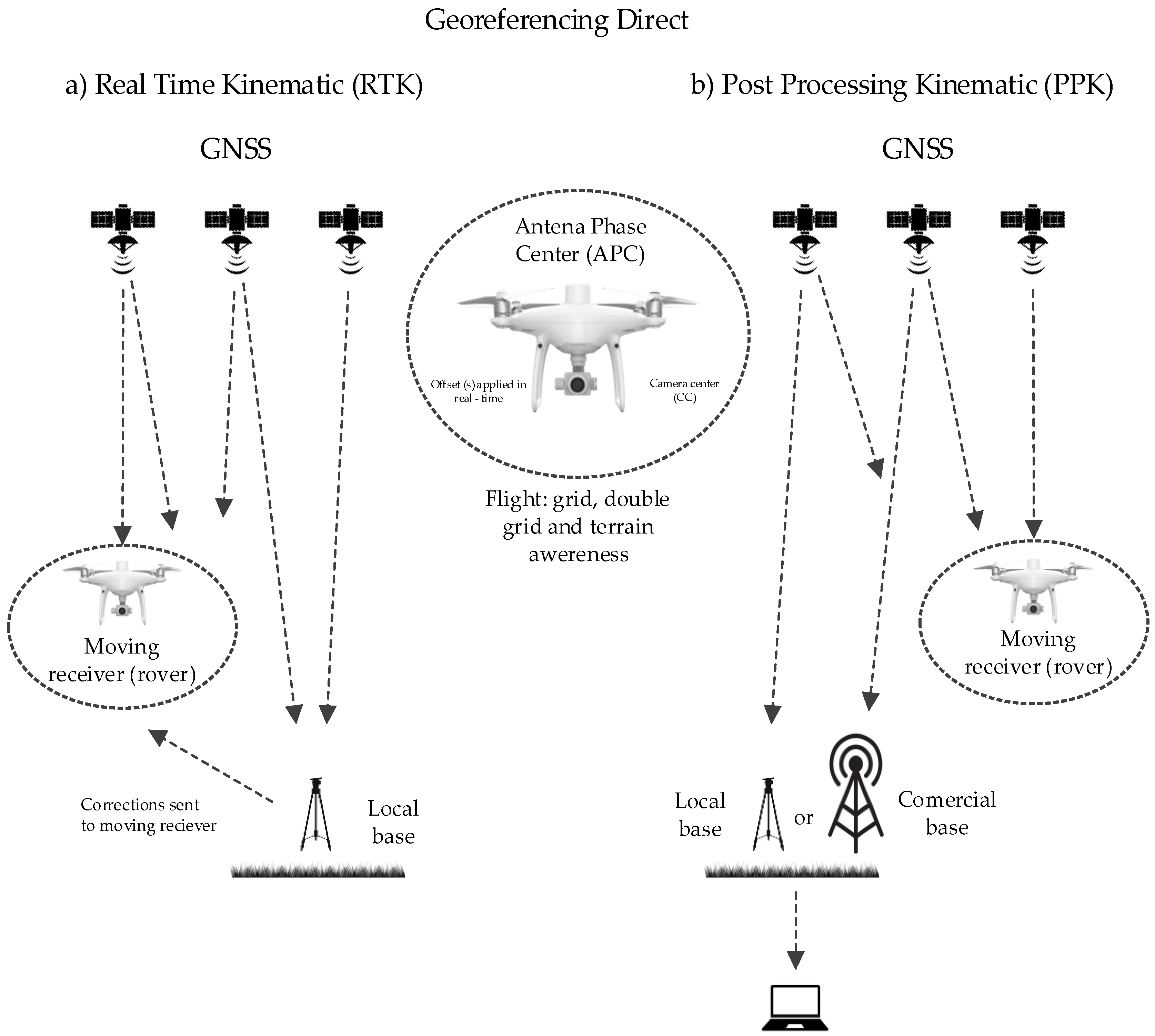
2.3. Positioning Configurations Adopted during Flight Tests
2.3.1. UAS-RTK Surveying
2.3.2. UAS-PPK Surveying
2.4. Photogrammetric Processing of the Acquired Data
2.5. Comparative Analysis
2.5.1. Accuracy Assessment
2.5.2. Cross-Section Analysis
3. Results
3.1. Geometric Accuracy of Aerial Photographic Mosaics
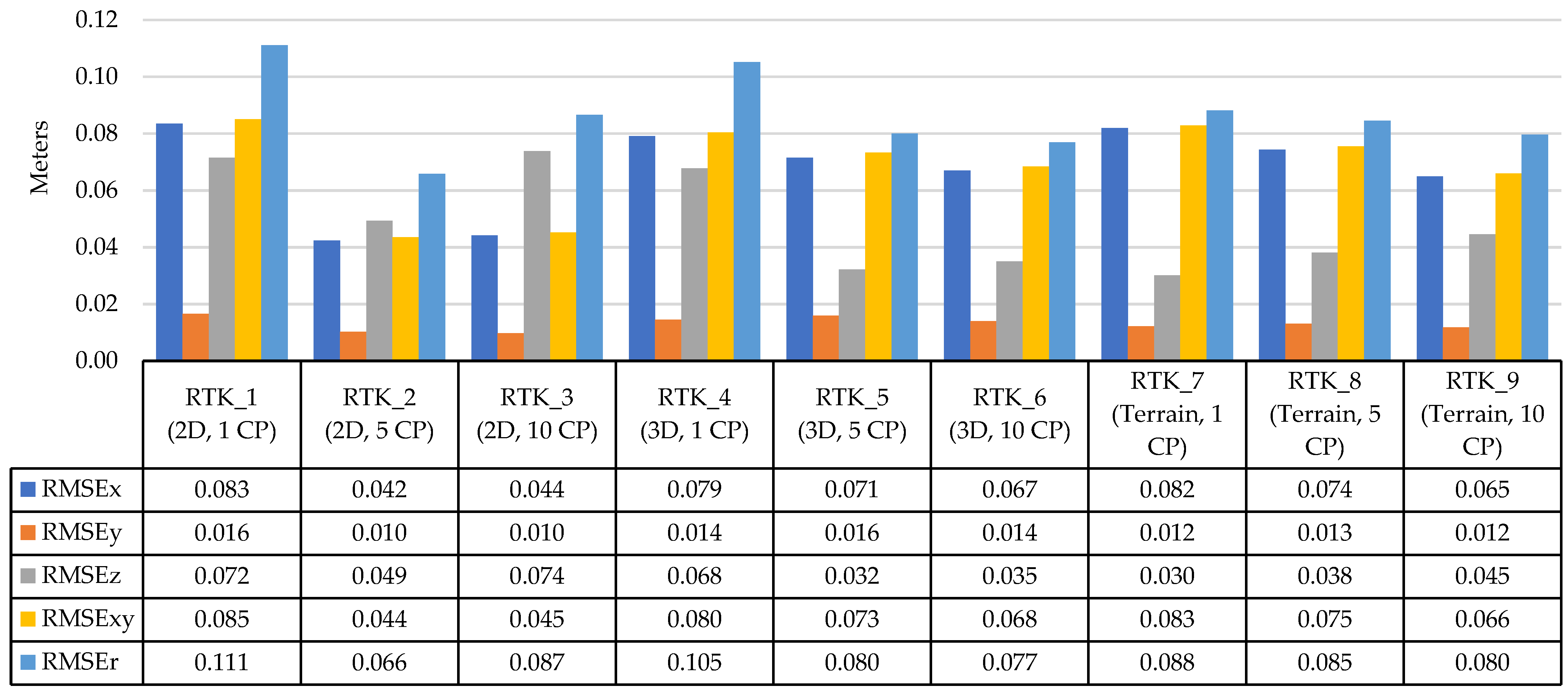
3.1.1. RTK Accuracy
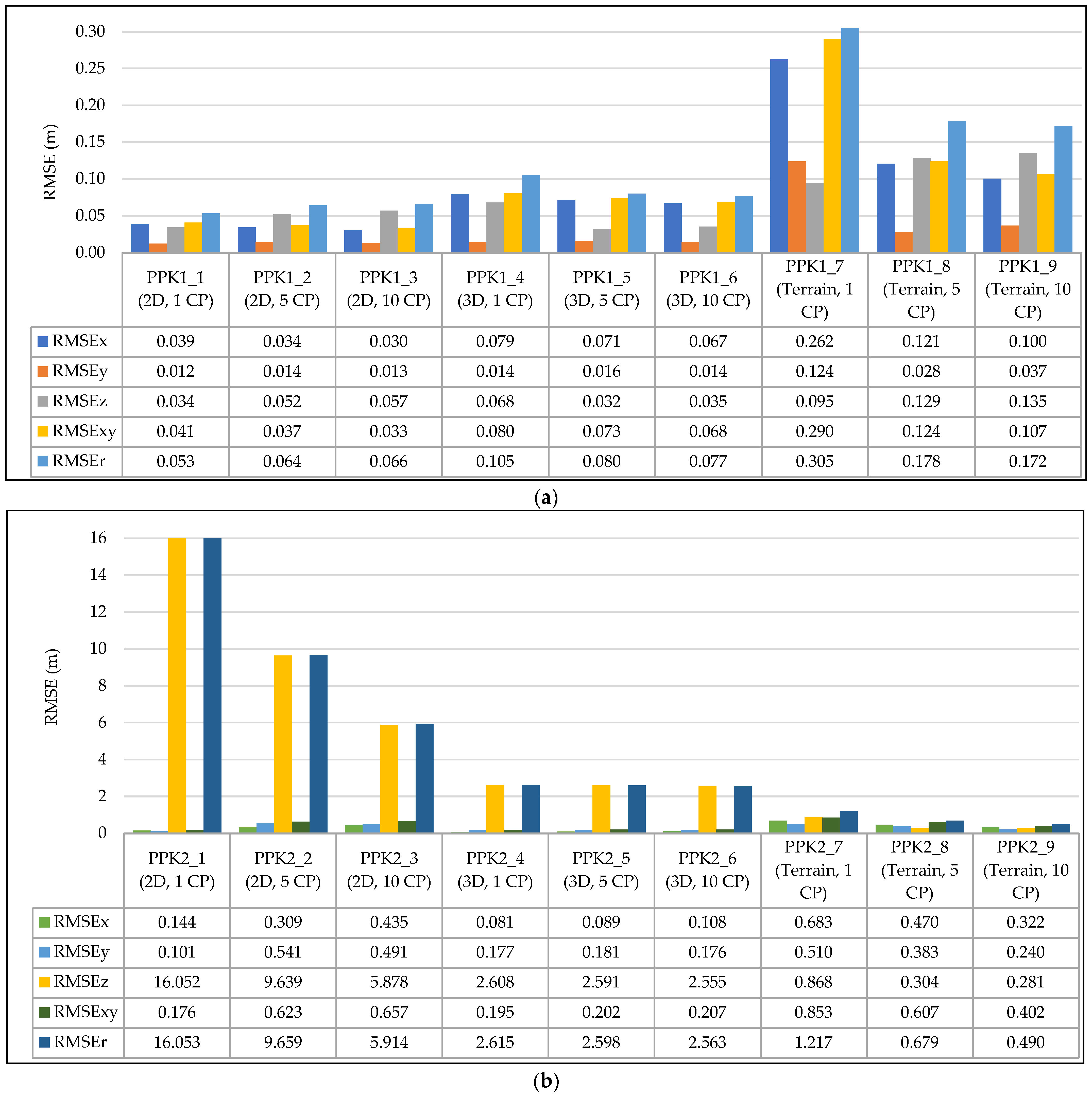
3.1.2. PPK1 and PPK2 Accuracy
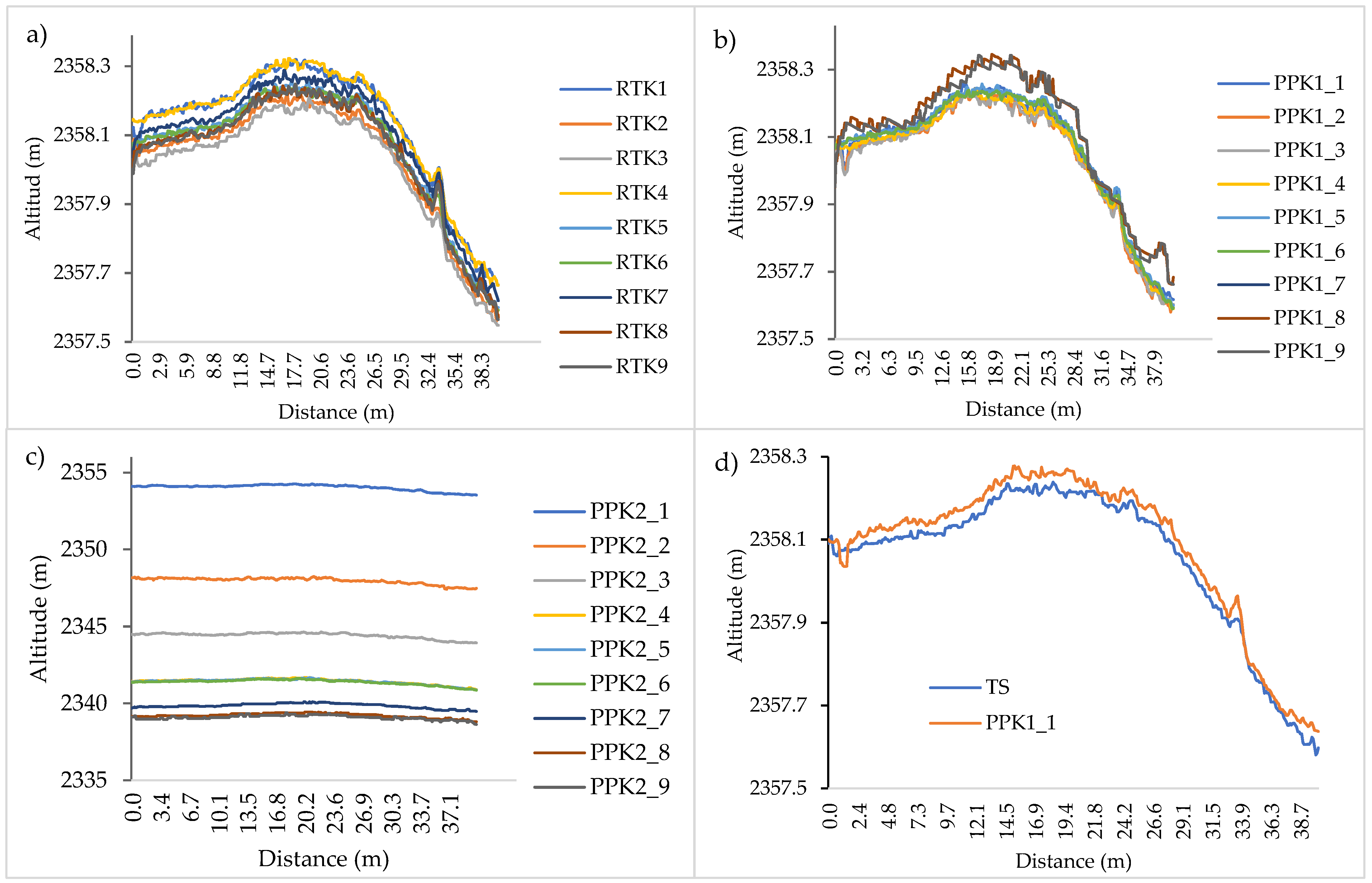
3.2. Cross-Section
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Koslowski, R.; Schulzke, M. Drones along Borders: Border Security UAVs in the United States and the European Union. Int. Stud. Perspect. 2018, 19, 305–324. [Google Scholar] [CrossRef]
- Blázquez, M.; Colomina, I. Relative INS/GNSS aerial control in integrated sensor orientation: Models and performance. ISPRS J. Photogramm. Remote Sens. 2012, 67, 120–133. [Google Scholar] [CrossRef]
- Kerle, N.; Nex, F.; Gerke, M.; Duarte, D.; Vetrivel, A. UAV-Based Structural Damage Mapping: A Review. ISPRS Int. J. Geo-Inf. 2019, 9, 14. [Google Scholar] [CrossRef]
- Jiang, S.; Jiang, C.; Jiang, W. Efficient structure from motion for large-scale UAV images: A review and a comparison of SfM tools. ISPRS J. Photogramm. Remote Sens. 2020, 167, 230–251. [Google Scholar] [CrossRef]
- Grubesic, T.H.; Nelson, J.R. UAVs and Urban Spatial Analysis; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Mozas-Calvache, A.T.; Pérez-García, J.L. Analysis and Comparison of Lines Obtained from GNSS and UAV for Large-Scale Maps. J. Surv. Eng. 2017, 143, 04016028. [Google Scholar] [CrossRef]
- Roberts, J.; Koeser, A.; Abd-Elrahman, A.; Wilkinson, B.; Hansen, G.; Landry, S.; Perez, A. Mobile Terrestrial Photogrammetry for Street Tree Mapping and Measurements. Forests 2019, 10, 701. [Google Scholar] [CrossRef]
- Xu, S.; Vosselman, G.; Elberink, S.O. Multiple-entity based classification of airborne laser scanning data in urban areas. ISPRS J. Photogramm. Remote Sens. 2014, 88, 1–15. [Google Scholar] [CrossRef]
- Pepe, M.; Fregonese, L.; Scaioni, M. Planning airborne photogrammetry and remote-sensing missions with modern platforms and sensors. Eur. J. Remote Sens. 2018, 51, 412–435. [Google Scholar] [CrossRef]
- Jones, C.A.; Church, E. Photogrammetry is for everyone: Structure-from-motion software user experiences in archaeology. J. Archaeol. Sci. Rep. 2020, 30, 102261. [Google Scholar] [CrossRef]
- Vasuki, Y.; Holden, E.-J.; Kovesi, P.; Micklethwaite, S. Semi-automatic mapping of geological Structures using UAV-based photogrammetric data: An image analysis approach. Comput. Geosci. 2014, 69, 22–32. [Google Scholar] [CrossRef]
- Taddia, Y.; Corbau, C.; Zambello, E.; Russo, V.; Simeoni, U.; Russo, P.; Pellegrinelli, A. UAVs to Assess the Evolution of Embryo Dunes. In Proceedings of the International Conference on Unmanned Aerial Vehicles in Geomatics, Bonn, Germany, 23 August 2017; Volume 42, pp. 363–369. [Google Scholar]
- Taddia, Y.; Pellegrinelli, A.; Corbau, C.; Franchi, G.; Staver, L.; Stevenson, J.; Nardin, W. High-Resolution Monitoring of Tidal Systems Using UAV: A Case Study on Poplar Island, MD (USA). Remote Sens. 2021, 13, 1364. [Google Scholar] [CrossRef]
- Gaitani, N.; Burud, I.; Thiis, T.; Santamouris, M. High-resolution spectral mapping of urban thermal properties with Unmanned Aerial Vehicles. Build. Environ. 2017, 121, 215–224. [Google Scholar] [CrossRef]
- Tokarczyk, P.; Leitao, J.P.; Rieckermann, J.; Schindler, K.; Blumensaat, F. High-quality observation of surface imperviousness for urban runoff modelling using UAV imagery. Hydrol. Earth Syst. Sci. 2015, 19, 4215–4228. [Google Scholar] [CrossRef]
- Salvo, G.; Caruso, L.; Scordo, A. Urban Traffic Analysis through an UAV. Procedia Soc. Behav. Sci. 2014, 111, 1083–1091. [Google Scholar] [CrossRef]
- Zhang, M.; Rao, Y.; Pu, J.; Luo, X.; Wang, Q. Multi-Data UAV Images for Large Scale Reconstruction of Buildings. In Proceedings of the Multi Media Modeling 26th International Conference, MMM 2020, Daejeon, Republic of Korea, 5–8 January 2020; Springer: Cham, Switzerland, 2020; Volume 11962, pp. 254–266. [Google Scholar]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Casapia, X.T.; Falen, L.; Bartholomeus, H.; Cárdenas, R.; Flores, G.; Herold, M.; Coronado, E.N.H.; Baker, T.R. Identifying and Quantifying the Abundance of Economically Important Palms in Tropical Moist Forest Using UAV Imagery. Remote Sens. 2020, 12, 9. [Google Scholar] [CrossRef]
- Westoby, M.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Kalacska, M.; Lucanus, O.; Arroyo-Mora, J.; Laliberté, E.; Elmer, K.; Leblanc, G.; Groves, A. Accuracy of 3D Landscape Reconstruction without Ground Control Points Using Different UAS Platforms. Drones 2020, 4, 13. [Google Scholar] [CrossRef]
- Cledat, E.; Jospin, L.; Cucci, D.; Skaloud, J. Mapping quality prediction for RTK/PPK-equipped micro-drones operating in complex natural environment. ISPRS J. Photogramm. Remote Sens. 2020, 167, 24–38. [Google Scholar] [CrossRef]
- Trujillo, M.M.; Darrah, M.; Speransky, K.; DeRoos, B.; Wathen, M. Optimized flight path for 3D mapping of an area with structures using a multirotor. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016. [Google Scholar] [CrossRef]
- Backes, D.; Schumann, G.; Teferele, F.N.; Boehm, J. Towards a High-Resolution Drone-Based 3D Mapping Dataset to Optimise Flood Hazard Modelling. In Proceedings of the ISPRS Geospatial Week 2019, Enschede, The Netherland, 10–14 June 2019; Volume 42, pp. 181–187. [Google Scholar]
- Gabrlik, P. The Use of Direct Georeferencing in Aerial Photogrammetry with Micro UAV. IFAC-Pap. 2015, 48, 380–385. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.J.; García-Ferrer, A.; Pérez-Porras, F.-J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Heipke, C.; Jacobsen, K.; Wegmann, H.; Andersen, Ø.; Nilsen, B. Test Goals and Test Set up for the OEEPE Test. In Integrated Sensor Orientation; OEEPE Official Publication: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Bilker, M.; Honkavaara, E.; Jaakkola, J. GSPS Supported Aerial Triangulation Using Untargeted Ground Control. Int. Arch. Photogramm. Remote Sens. 1998, 32, 2–9. [Google Scholar]
- Ip, A.; El-Sheimy, N.; Mostafa, M. Performance Analysis of Integrated Sensor Orientation. Photogramm. Eng. Remote Sens. 2007, 73, 89–97. [Google Scholar] [CrossRef]
- Cramer, M.; Stallmann, D.; Haala, N. Direct Georeferencing Using GPS/Inertial Exterior Orientations for Photogrammetric. Int. Arch. Photogramm. Remote Sens. 2000, 33, 198–205. [Google Scholar]
- Losè, L.T.; Chiabrando, F.; Tonolo, F.G. Boosting the Timeliness of UAV Large Scale Mapping. Direct Georeferencing Approaches: Operational Strategies and Best Practices. ISPRS Int. J. Geo-Inf. 2020, 9, 578. [Google Scholar] [CrossRef]
- Xiang, T.-Z.; Xia, G.-S.; Zhang, L. Mini-unmanned aerial vehicle-based remote sensing: Techniques, applications, and prospects. IEEE Geosci. Remote Sens. Mag. 2019, 7, 29–63. [Google Scholar] [CrossRef]
- Zhang, H.; Aldana-Jague, E.; Clapuyt, F.; Wilken, F.; Vanacker, V.; Van Oost, K. Evaluating the potential of post-processing kinematic (PPK) georeferencing for UAV-based structure- from-motion (SfM) photogrammetry and surface change detection. Earth Surf. Dyn. 2019, 7, 807–827. [Google Scholar] [CrossRef]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra Di Cella, U.; Roncella, R.; Santise, M. Testing Accuracy and Repeatability of UAV Blocks Oriented with GNSS-Supported Aerial Triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef]
- Rehak, M.; Skaloud, J. FIXED-WING Micro Aerial Vehicle for Accurate Corridor Mapping. In Proceedings of the International Conference on Unmanned Aerial Vehicles in Geomatics, Toronto, ON, Canada, 30 August–2 September 2015; Volume 2, pp. 23–31. [Google Scholar]
- Stöcker, C.; Nex, F.; Koeva, M.; Gerke, M. Quality Assessment of Combined IMU/GNSS Data for Direct Georeferencing in the Context of UAV-Based Mapping. In Proceedings of the International Conference on Unmanned Aerial Vehicles in Geomatics, Bonn, Germany, 4–7 September 2017; Volume 42, pp. 355–361. [Google Scholar]
- Rehak, M.; Mabillard, R.; Skaloud, J. A Micro Aerial Vehicle with Precise Position and Attitude Sensors. Photogramm. -Fernerkund. -Geoinf. 2014, 4, 239–251. [Google Scholar] [CrossRef]
- Cucci, D.A.; Rehak, M.; Skaloud, J. Bundle adjustment with raw inertial observations in UAV applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 1–12. [Google Scholar] [CrossRef]
- Rabah, M.; Basiouny, M.; Ghanem, E.; Elhadary, A. Using RTK and VRS in direct geo-referencing of the UAV imagery. NRIAG J. Astron. Geophys. 2018, 7, 220–226. [Google Scholar] [CrossRef]
- Hugenholtz, C.; Brown, O.; Walker, J.; Barchyn, T.; Nesbit, P.; Kucharczyk, M.; Myshak, S. Spatial Accuracy of UAV-Derived Orthoimagery and Topography: Comparing Photogrammetric Models Processed with Direct Geo-Referencing and Ground Control Points. Geomatica 2016, 70, 21–30. [Google Scholar] [CrossRef]
- Forlani, G.; Diotri, F.; Morra Di Cella, U.; Roncella, R. UAV Block Georeferencing and Control by ON-BOARD GNSS Data. In Proceedings of the XXIV ISPRS Congress, Nice, France, 31 August–2 September 2020; Volume 43, pp. 9–16. [Google Scholar]
- DJI Phantom 4 RTK, User Manual v2.4. Available online: https://www.dji.com/downloads/products/phantom-4-rtk (accessed on 3 May 2022).
- Przybilla, H.-J.; Bäumker, M.; Luhmann, T.; Hastedt, H.; Eilers, M. Interaction between direct georeferencing, control point configuration and camera self-calibration for rtk-based uav photogrammetry. In Proceedings of the XXIV ISPRS Congress, Nice, France, 31 August–2 September 2020; pp. 485–492. [Google Scholar]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Coastal Mapping Using DJI Phantom 4 RTK in Post-Processing Kinematic Mode. Drones 2020, 4, 9. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the Georeferencing Accuracy of a Photogrammetric Model Using a Quadrocopter with Onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar] [CrossRef]
- Losè, L.T.; Chiabrando, F.; Tonolo, F.G. Are measured ground control points still required in uav based large scale mapping? Assessing the positional accuracy of an RTK multi-rotor platform. In Proceedings of the XXIV ISPRS Congress, Nice, France, 31 August–2 September 2020; pp. 507–514. [Google Scholar]
- American Society for Photogrammetryand Remote Sensing (ASPRS). ASPRS Positional Accuracy Standards for Digital Geospatial Data. Photogramm. Eng. Remote Sens. 2015, 81, A1–A26. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H. Applying ASPRS Accuracy Standards to Surveys from Small Unmanned Aircraft Systems (UAS). Photogramm. Eng. Remote Sens. 2015, 81, 787–793. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Accuracy of Digital Surface Models and Orthophotos Derived from Unmanned Aerial Vehicle Photogrammetry. J. Surv. Eng. 2017, 143, 04016025. [Google Scholar] [CrossRef]
- Rscón, J.; Angeles, W.G.; Oliva, M.; Huatangari, L.Q.; Grurbillon, M.A.B. Determinación de Las Épocas Lluviosas y Secas En La Ciudadde Chachapoyas Para El Periodo de 2014–2018. Rev. Climatol. 2020, 20, 15–28. [Google Scholar]
- Municipalidad Provincial de Chachapoyas (MPCH). Plan de Desarrollo Urbano de La Ciudad de Chachapoyas; Scribd: Chschapoyas, Peru, 2013.
- Instituto Geográfico Nacional (IGN). Norma Técnica Geodésica: Especificaciones Técnicas Para Posicionamiento Geodésico Estático Relativo Con Receptores Del Sistema Satelital de Navegación Global; IGN: Lima, Peru, 2015. [Google Scholar]
- TRIMBLE. Trimble R10 GNSS Receiver User Guide; IGN: Lima, Peru, 2014. [Google Scholar]
- DJI. D-RTK 2 High Precision GNSS Mobile Station Release Notes; DJI: Shenzhen, China, 2021. [Google Scholar]
- Takasu, T.; Yasuda, A. Development of the Low-Cost RTK-GPS Receiver with an Open Source Program Package RTKLIB. In International Symposium on GPS/GNSS; International Convention Center Jeju Korea: Seogwipo-si, Korea, 2009; Volume 1, pp. 1–6. [Google Scholar]
- REDcatch. REDtoolbox v2.77 User Manual; REDcatch: Fulpmes, Austria; pp. 1–29.
- Agisoft Metashape User Manual, Standard Edition, Version 1.7. Available online: https://www.agisoft.com/downloads/user-manuals/ (accessed on 3 May 2021).
- Congalton, R.G. Thematic and Positional Accuracy Assessment of Digital Remotely Sensed Data. In Proceedings of the Seventh Annual Forest Inventory and Analysis Symposium, Portland, ME, USA, 3–6 October 2005; pp. 149–154. [Google Scholar]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Using Dji Phantom 4 Rtk Drone for Topographic Mapping of Coastal Areas. In Proceedings of the ISPRS Geospatial Week 2019, Enschede, The Netherlands, 10–14 June 2019; Volume 42, pp. 625–630. [Google Scholar]
- Tenedório, J.A.; Estanqueiro, R.; Lima, A.M.; Marques, J. Remote Sensing from Unmanned Aerial Vehicles for 3D Urban Modelling: Case Study of Loulé, Portugal. In Back to the Sense of the City: International Monograph Book; Centre de Política de Sòl i Valoracions: Loulé, Portugal, 2016. [Google Scholar]
- Instituto Geográfico Nacional. Diario el Peruano Resolución Jefatural No. 149-2022_IGN_DIG_SDPG; Normas y Documentos Legales; Gobierno Del Perú: Lima, Peru, 2022.
- Trajkovski, K.K.; Grigillo, D.; Petrovič, D. Optimization of UAV Flight Missions in Steep Terrain. Remote Sens. 2020, 12, 1293. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; di Cella, U.M.; Roncella, R.; Santise, M. Quality Assessment of DSMs Produced from UAV Flights Georeferenced with On-Board RTK Positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Configuration ID 1 | Positioning Solution | Photogrammetric Projects According to N° CP | ||
|---|---|---|---|---|
| 1 | 3 | 5 | ||
| A | RTK (Refined position due to corrections sent by a GNSS base station in the field, the D-RTK 2 receiver placed at a point of known coordinates) | RTK_1, RTK_4, RTK_7. | RTK_2, RTK_5, RTK_8 | RTK_3, RTK_6, RTK_9, |
| B | PPK1 (Refined position due to post-process corrections by a GNSS base station in cabinet, Trimble R10 receiver placed at a point of known coordinates) | PPK1_1, PPK1_4, PPK1_7. | PPK1_2, PPK1_5, PPK1_8. | PPK1_3, PPK1_6, PPK1_9. |
| PPK2 (Refined position due to post-process corrections by a GNSS base station in a cabinet, the commercial receiver AMA01 established by IGN) | PPK2_1, PPK2_4, PPK2_7. | PPK2_2, PPK2_5, PPK2_8. | PPK2_3, PPK2_3, PPK2_9. | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salas López, R.; Terrones Murga, R.E.; Silva-López, J.O.; Rojas-Briceño, N.B.; Gómez Fernández, D.; Oliva-Cruz, M.; Taddia, Y. Accuracy Assessment of Direct Georeferencing for Photogrammetric Applications Based on UAS-GNSS for High Andean Urban Environments. Drones 2022, 6, 388. https://doi.org/10.3390/drones6120388
Salas López R, Terrones Murga RE, Silva-López JO, Rojas-Briceño NB, Gómez Fernández D, Oliva-Cruz M, Taddia Y. Accuracy Assessment of Direct Georeferencing for Photogrammetric Applications Based on UAS-GNSS for High Andean Urban Environments. Drones. 2022; 6(12):388. https://doi.org/10.3390/drones6120388
Chicago/Turabian StyleSalas López, Rolando, Renzo E. Terrones Murga, Jhonsy O. Silva-López, Nilton B. Rojas-Briceño, Darwin Gómez Fernández, Manuel Oliva-Cruz, and Yuri Taddia. 2022. "Accuracy Assessment of Direct Georeferencing for Photogrammetric Applications Based on UAS-GNSS for High Andean Urban Environments" Drones 6, no. 12: 388. https://doi.org/10.3390/drones6120388
APA StyleSalas López, R., Terrones Murga, R. E., Silva-López, J. O., Rojas-Briceño, N. B., Gómez Fernández, D., Oliva-Cruz, M., & Taddia, Y. (2022). Accuracy Assessment of Direct Georeferencing for Photogrammetric Applications Based on UAS-GNSS for High Andean Urban Environments. Drones, 6(12), 388. https://doi.org/10.3390/drones6120388