
A Case Study of Vignetting Nonuniformity in UAV-Based Uncooled Thermal Cameras

Abstract
:1. Introduction
2. Materials and Methods
2.1. Thermal Cameras
2.2. Radiometric Calibrations
2.3. Warmup Experiments
2.4. Wind Experiments
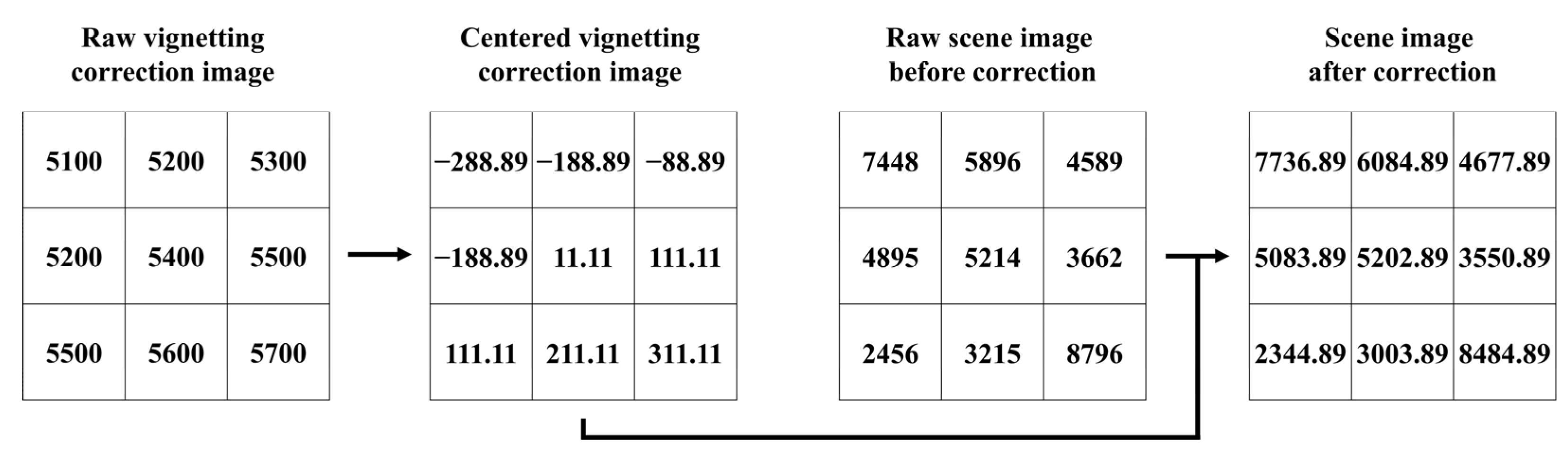
2.5. Proposed Vignetting Mitigation
2.6. Data Analysis
3. Results and Discussion
3.1. Radiometric Calibrations
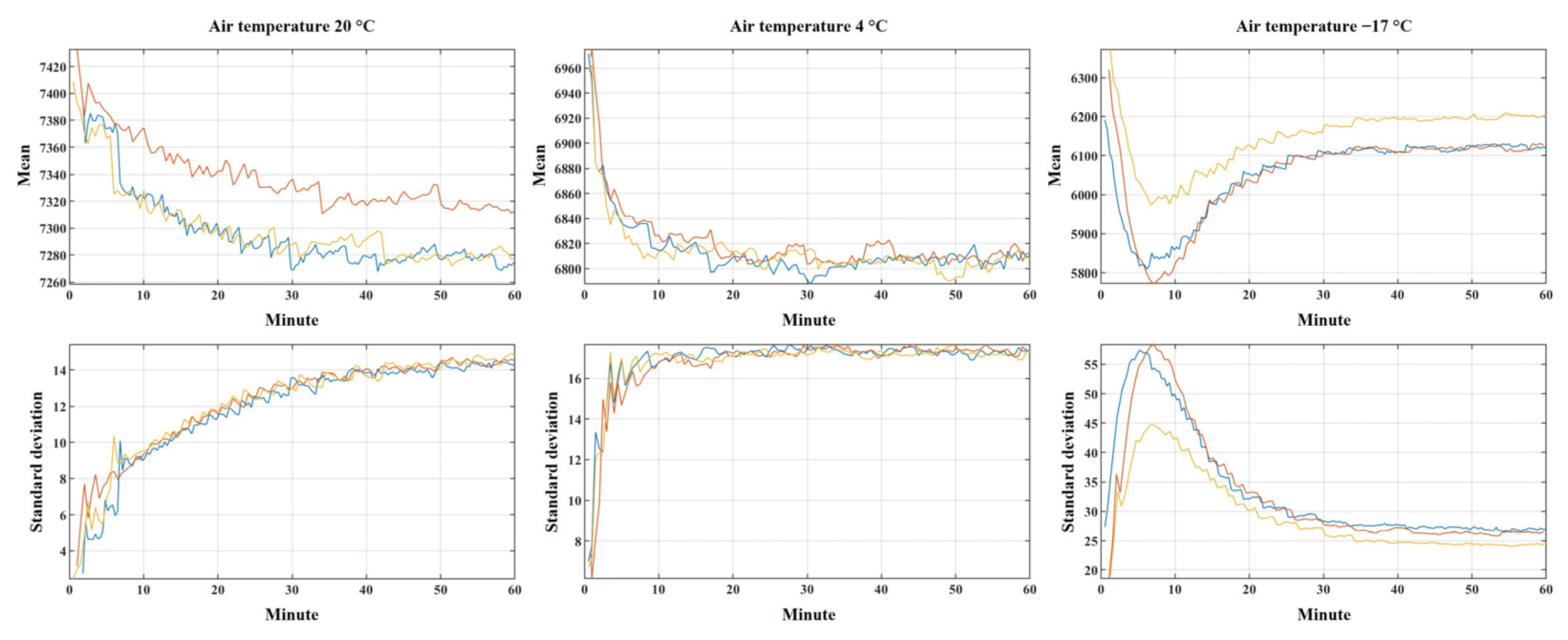
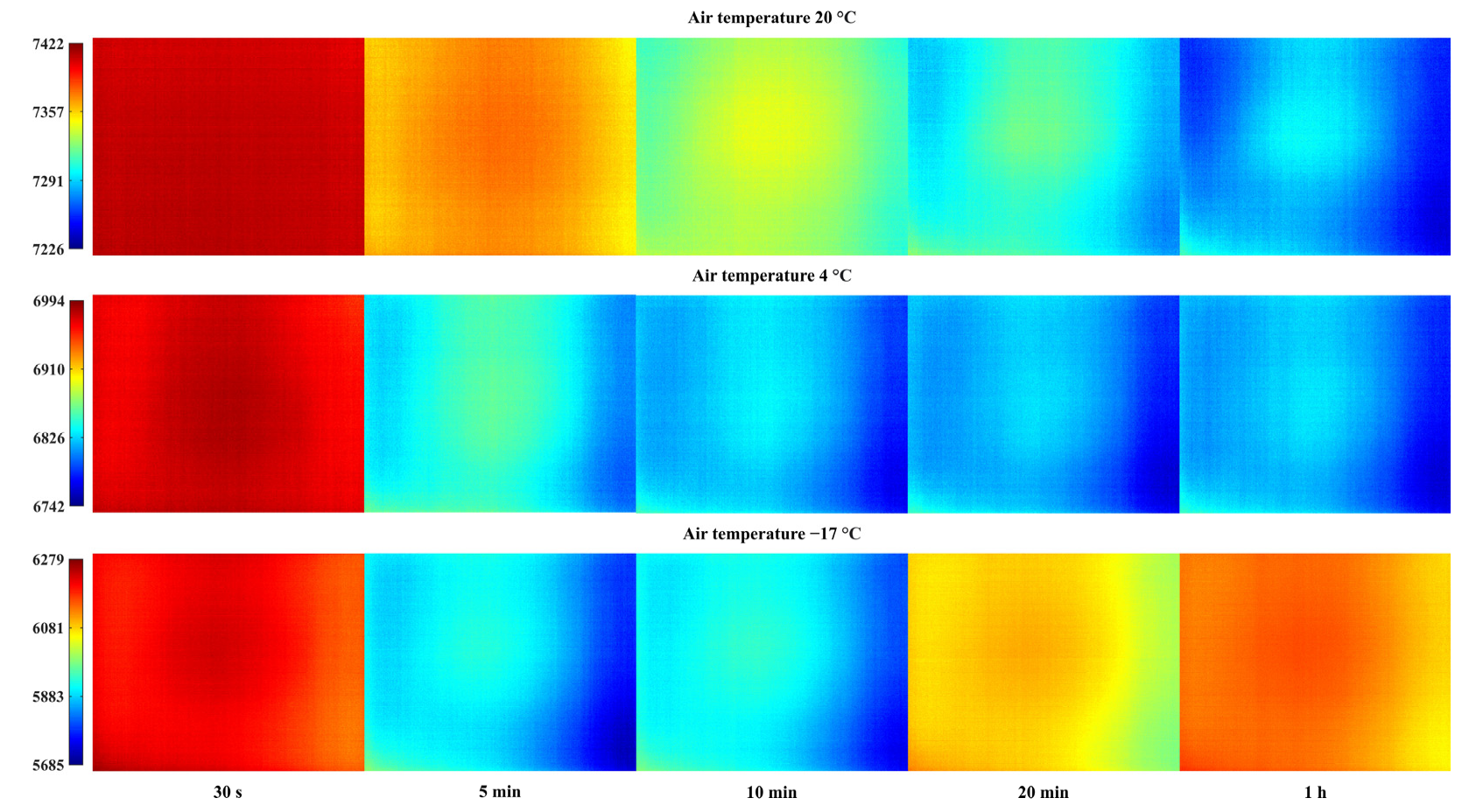
3.2. Warmup Experiments
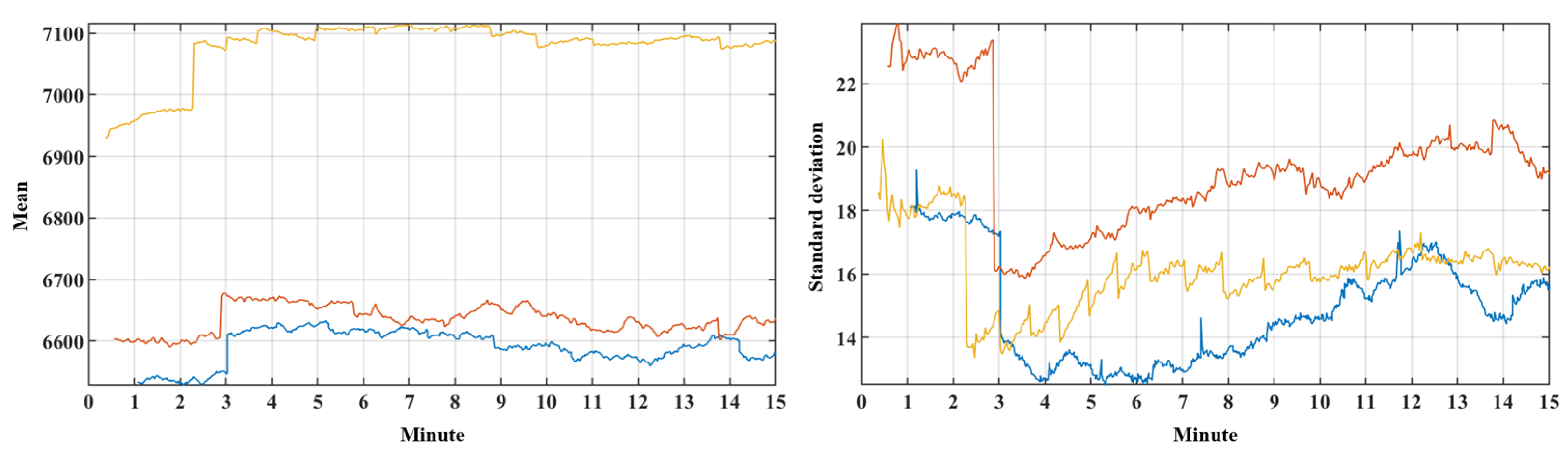
3.2.1. XT2 during Stabilization
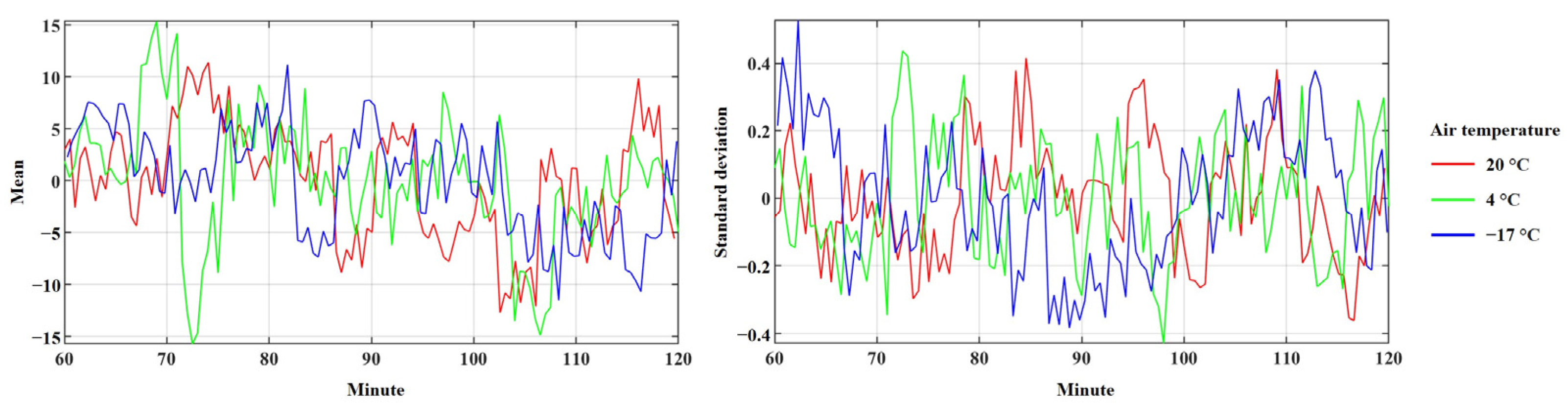
3.2.2. XT2 after Stabilization
3.2.3. Duo R
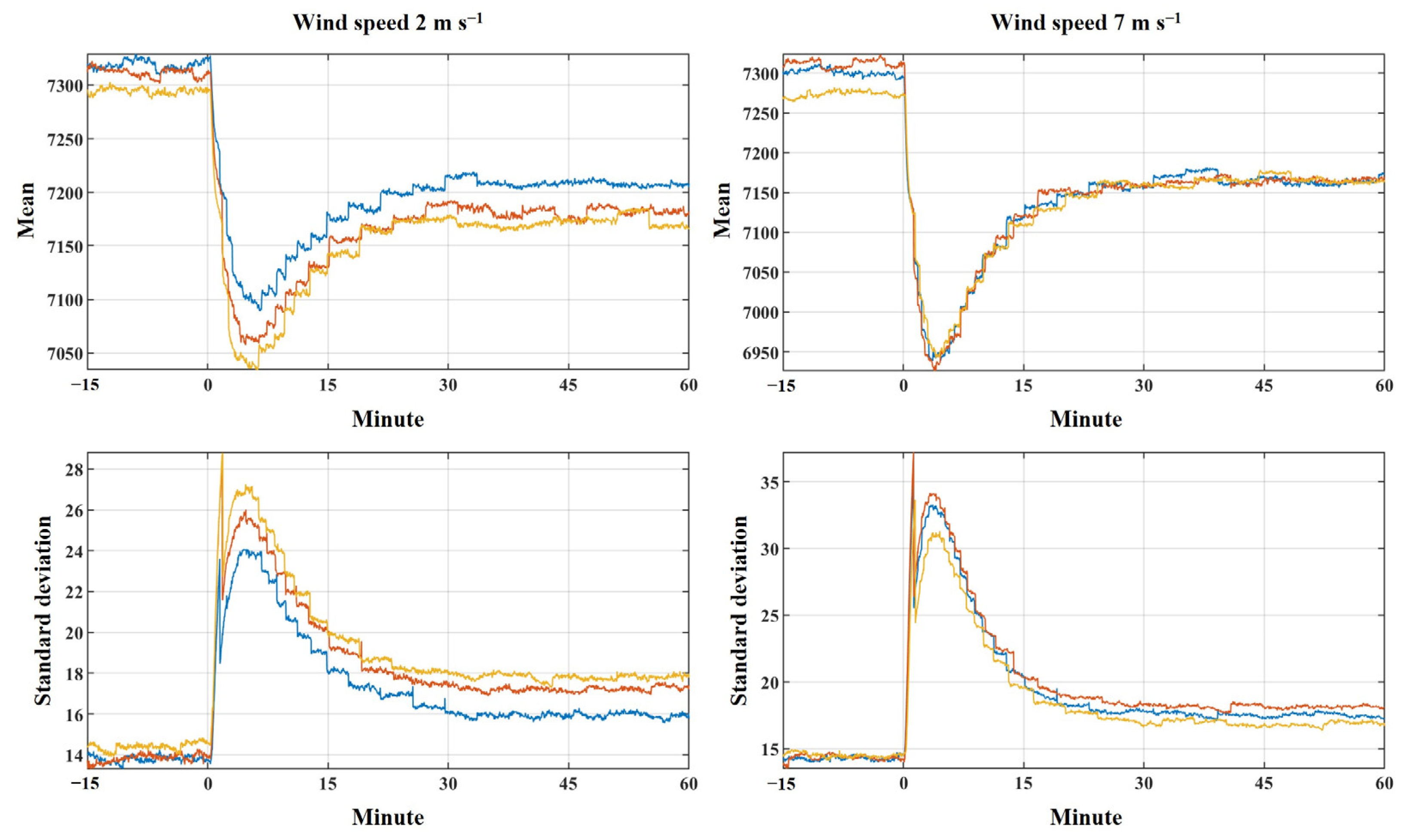
3.3. Wind Experiments
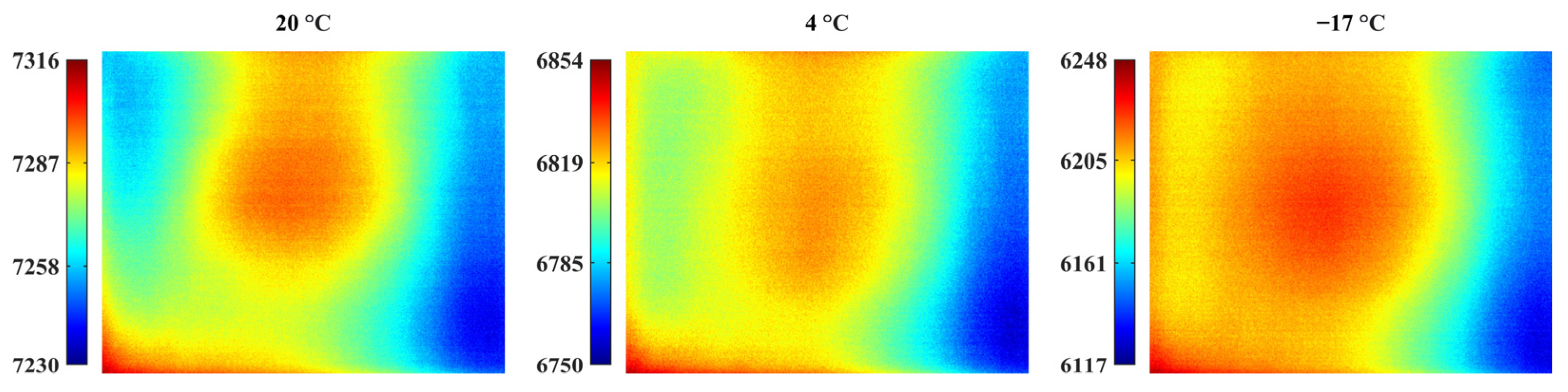
3.3.1. Influence on Vignetting Severity
3.3.2. Influence on Vignetting Pattern
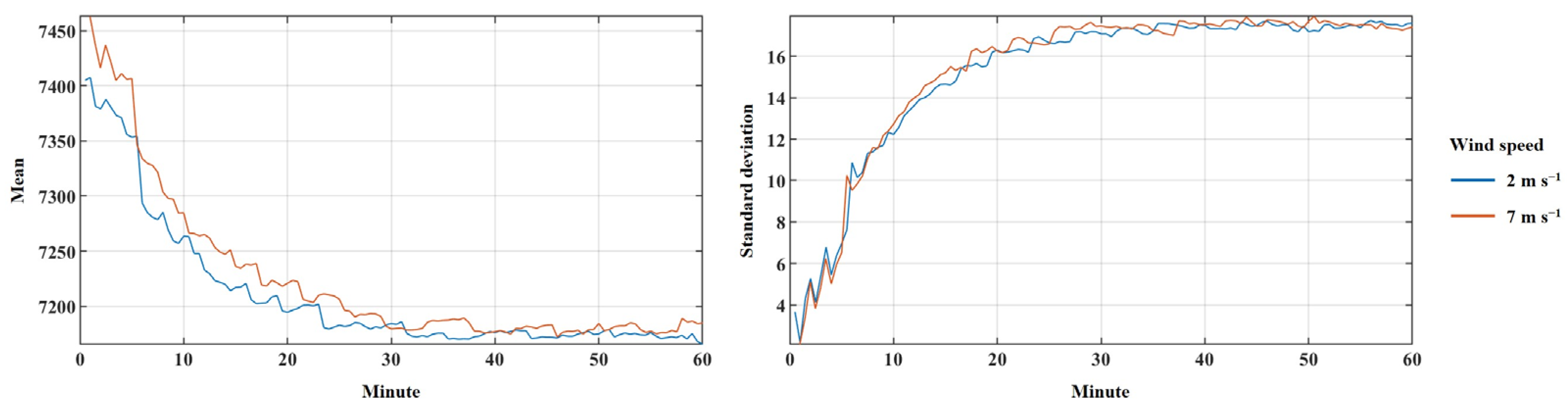
3.3.3. Influence on Warmup
3.4. Field Experiments
3.4.1. Time Window for Vignetting Correction Image Collection
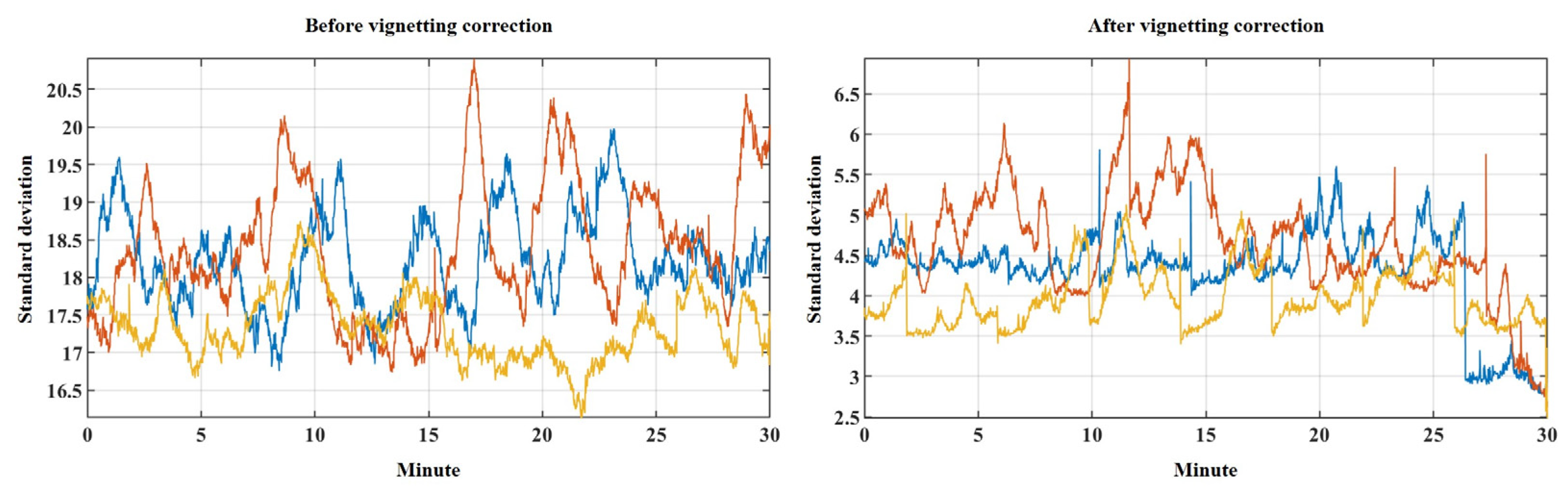
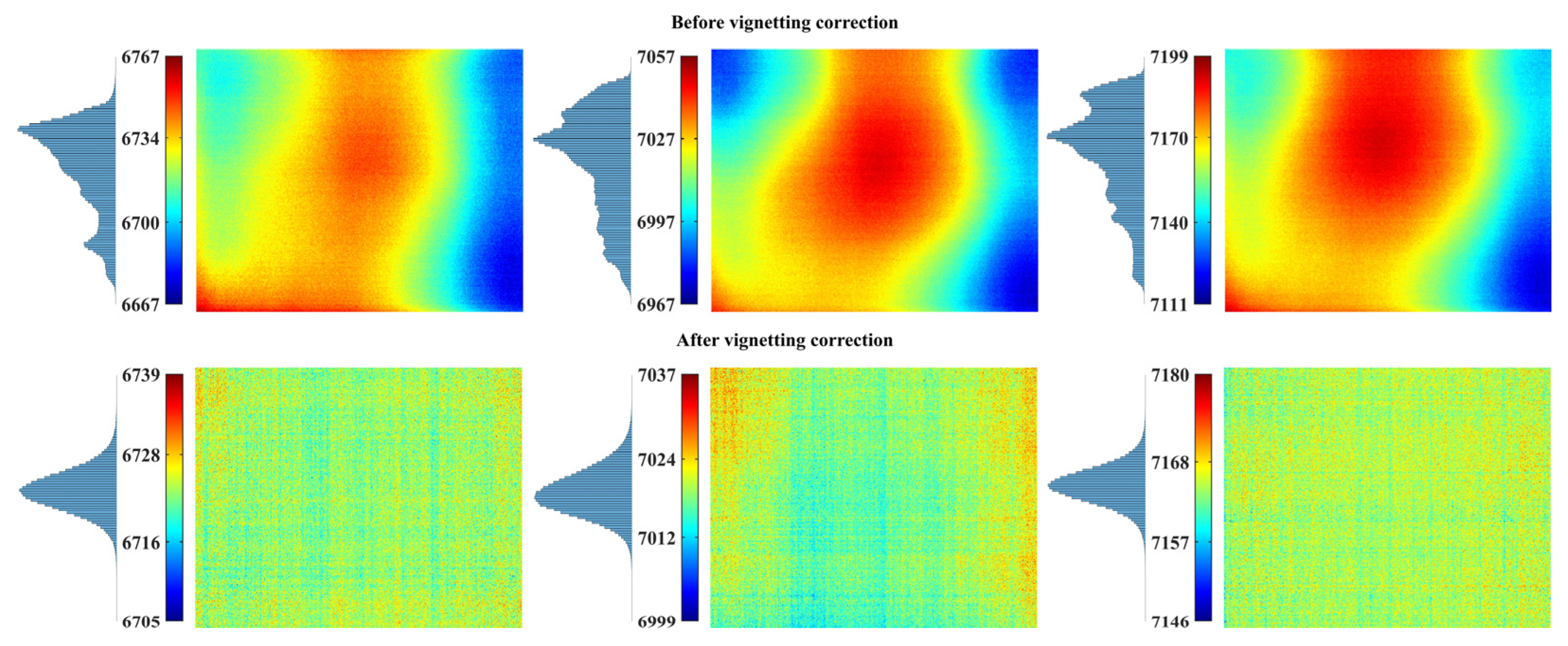
3.4.2. Vignetting Mitigation Results
3.5. Future Work
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gade, R.; Moeslund, T.B. Thermal cameras and applications: A survey. Mach. Vis. Appl. 2014, 25, 245–262. [Google Scholar] [CrossRef] [Green Version]
- Mesas-Carrascosa, F.-J.; Pérez-Porras, F.; de Larriva, J.E.M.; Frau, C.M.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P.; García-Ferrer, A. Drift correction of lightweight microbolometer thermal sensors on-board unmanned aerial vehicles. Remote Sens. 2018, 10, 65. [Google Scholar] [CrossRef] [Green Version]
- Messina, G.; Modica, G. Applications of UAV thermal imagery in precision agriculture: State of the art and future research outlook. Remote Sens. 2020, 12, 1491. [Google Scholar] [CrossRef]
- Rogalski, A. Progress in focal plane array technologies. Prog. Quantum Electron. 2012, 36, 342–473. [Google Scholar] [CrossRef]
- Olbrycht, R.; Więcek, B. New approach to thermal drift correction in microbolometer thermal cameras. Quant. Infrared Thermogr. J. 2015, 12, 184–195. [Google Scholar] [CrossRef]
- Michel, M.; Blaeser, S.; Zakizade, E.; Weyers, S.; Weiler, D. 6 µm Microbolometers for Uncooled Thermal Imaging. In Electro-Optical and Infrared Systems: Technology and Applications XVIII and Electro-Optical Remote Sensing XV; SPIE: Bellingham, WA, USA, 2021; Volume 1186605, pp. 1–5. [Google Scholar]
- Nascimento, V.M.; Silva, M.E.B.G.N.; Liu, S.; Manera, L.; Méchin, L.; Guillet, B. Optical and Electrical Characterizations of Uncooled Bolometers Based on LSMO Thin Films. Multidiscip. Digit. Publ. Inst. Proc. 2017, 1, 634. [Google Scholar]
- Olbrycht, R.; Wiecek, B.; De Mey, G. Thermal drift compensation method for microbolometer thermal cameras. Appl. Opt. 2012, 51, 1788–1794. [Google Scholar] [CrossRef]
- Çalik, R.C.; Tunali, E.; Ercan, B.; Oz, S. A study on Calibration Methods for Infrared Focal Plane Array Cameras. In Proceedings of the VISIGRAPP 2018—Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications, Madeira, Portugal, 27–29 January 2018; Volume 4, pp. 219–226. [Google Scholar]
- Marcotte, F.; Tremblay, P.; Farley, V. Infrared Camera NUC and Calibration: Comparison of advanced methods. In Infrared Imaging Systems: Design, Analysis, Modeling, and Testing XXIV; SPIE: Bellingham, WA, USA, 2013; Volume 8706, pp. 17–26. [Google Scholar]
- Song, S.; Zhai, X. Research on non-uniformity correction based on blackbody calibration. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; pp. 2146–2150. [Google Scholar]
- Zhou, H.-X.; Lai, R.; Liu, S.-Q.; Jiang, G. New improved nonuniformity correction for infrared focal plane arrays. Opt. Commun. 2005, 245, 49–53. [Google Scholar] [CrossRef]
- Kelly, J.; Kljun, N.; Olsson, P.-O.; Mihai, L.; Liljeblad, B.; Weslien, P.; Klemedtsson, L.; Eklundh, L. Challenges and best practices for deriving temperature data from an uncalibrated UAV thermal infrared camera. Remote Sens. 2019, 11, 567. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; He, Z.; Yang, J.; Ye, X.; Cao, Y. A multi-scale non-uniformity correction method based on wavelet decomposition and guided filtering for uncooled long wave infrared camera. Signal Process. Image Commun. 2018, 60, 13–21. [Google Scholar] [CrossRef]
- Chang, S. Flat-field correction for high-throughput fluorescence microscopy. Opt. Eng. 2022, 61, 034107. [Google Scholar]
- Guan, J.; Lai, R.; Xiong, A.; Liu, Z.; Gu, L. Fixed pattern noise reduction for infrared images based on cascade residual attention CNN. Neurocomputing 2020, 377, 301–313. [Google Scholar] [CrossRef]
- Harris, J.G.; Chiang, Y.-M. Nonuniformity correction of infrared image sequences using the constant-statistics constraint. IEEE Trans. Image Process. 1999, 8, 1148–1151. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chavez, A.J.; Vicencio, F.T. Acceleration algorithm for constant-statistics method applied to the nonuniformity correction of infrared sequences. Opto-Electron. Rev. 2015, 23, 118–121. [Google Scholar]
- Ratliff, B.M.; Hayat, M.M.; Hardie, R.C. An algebraic algorithm for nonuniformity correction in focal-plane arrays. J. Opt. Soc. Am. A 2002, 19, 1737–1747. [Google Scholar] [CrossRef]
- Torres, S.N.; Pezoa, J.E.; Hayat, M.M. Scene-based nonuniformity correction for focal plane arrays by the method of the inverse covariance form. Appl. Opt. 2003, 42, 5872–5881. [Google Scholar] [CrossRef] [Green Version]
- Qian, W.; Chen, Q.; Gu, G. Space low-pass and temporal high-pass nonuniformity correction algorithm. Opt. Rev. 2010, 17, 24–29. [Google Scholar] [CrossRef]
- Liang, Y.; Qin, H.; Wu, J.; Zeng, Q.; Zhou, H. Temporal high-pass filter non-uniformity correction based on guided bilateral filter for IRFPA. In Proceedings of the AOPC 2017, Optical Sensing and Imaging Technology and Applications, Beijing, China, 4–6 June 2017; p. 228. [Google Scholar]
- Zeng, J.; Sui, X.; Gao, H. Adaptive Image-Registration-Based Nonuniformity Correction Algorithm With Ghost Artifacts Eliminating for Infrared Focal Plane Arrays. IEEE Photonics J. 2015, 7, 6803016. [Google Scholar] [CrossRef]
- Scribner, D.A.; Sarkady, K.A.; Kruer, M.R.; Caulfield, J.T.; Hunt, J.D.; Colbert, M.; Descour, M. Adaptive Retina-Like Preprocessing for Imaging Detector Arrays. In Proceedings of the IEEE International Conference on Neural Networks, San Francisco, CA, USA, 28 March–1 April 1993; pp. 1955–1960. [Google Scholar]
- Chen, N.; Zhang, J.; Zhong, S.; Ji, Z.; Yao, L. Nonuniformity Correction for Variable-Integration-Time Infrared Camera. IEEE Photonics J. 2018, 10, 7801611. [Google Scholar] [CrossRef]
- He, Z.; Cao, Y.; Dong, Y.; Yang, J.; Cao, Y.; Tisse, C.-L. Single-image-based nonuniformity correction of uncooled long-wave infrared detectors: A deep-learning approach. Appl. Opt. 2018, 57, D155–D164. [Google Scholar] [CrossRef]
- Olbrycht, R.; Wiȩcek, B.; De Mey, G. New Approach to Thermal Drift and Gain Non-Uniformity Correction in Microbolometer Detectors. In Proceedings of the 17th International Workshop on Thermal Investigations of ICs and Systems (THERMINIC), Paris, France, 27–29 September 2011; pp. 27–30. [Google Scholar]
- Xu, R.; Li, C.; Bernardes, S. Development and testing of a uav-based multi-sensor system for plant phenotyping and precision agriculture. Remote Sens. 2021, 13, 3517. [Google Scholar] [CrossRef]
- Israel, M.; Reinhard, A. Detecting nests of lapwing birds with the aid of a small unmanned aerial vehicle with thermal camera. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1199–1207. [Google Scholar]
- Labbé, S.; Roux, B.; Bégué, A.; Lebourgeois, V.; Mallavan, B. An operational solution to acquire multispectral images with standard light cameras: Characterization and acquisition guidelines. In Proceedings of the ISPRS Work. Airborne Digit. Photogramm. Sens. Syst. 2007; pp. 1–6. [Google Scholar]
- Lin, D.; Maas, H.-G.; Westfeld, P.; Budzier, H.; Gerlach, G. An advanced radiometric calibration approach for uncooled thermal cameras. Photogramm. Rec. 2018, 33, 30–48. [Google Scholar] [CrossRef]
- Virtue, J.; Turner, D.; Williams, G.; Zeliadt, S.; McCabe, M.; Lucieer, A. Thermal sensor calibration for unmanned aerial systems using an external heated shutter. Drones 2021, 5, 119. [Google Scholar] [CrossRef]
- Aragon, B.; Johansen, K.; Parkes, S.; Malbeteau, Y.; Al-mashharawi, S.; Al-amoudi, T.; Andrade, C.F.; Turner, D.; Lucieer, A.; McCabe, M.F. A calibration procedure for field and uav-based uncooled thermal infrared instruments. Sensors 2020, 20, 3316. [Google Scholar] [CrossRef] [PubMed]
- Playà-Montmany, N.; Tattersall, G.J. Spot size, distance and emissivity errors in field applications of infrared thermography. Methods Ecol. Evol. 2021, 12, 828–840. [Google Scholar] [CrossRef]
- Emery, W.; Camps, A. Optical Imaging Systems; Elsevier: Amsterdam, The Netherlands, 2017; ISBN 9780128092545. [Google Scholar]
- Grgić, G.; Pušnik, I. Analysis of thermal imagers. Int. J. Thermophys. 2011, 32, 237–247. [Google Scholar] [CrossRef]
- Yang, Y.; Lee, X. Four-band thermal mosaicking: A new method to process infrared thermal imagery of urban landscapes from UAV flights. Remote Sens. 2019, 11, 1365. [Google Scholar] [CrossRef] [Green Version]
- Harvey, M.C.; Hare, D.K.; Hackman, A.; Davenport, G.; Haynes, A.B.; Helton, A.; Lane, J.J.W.; Briggs, M.A. Evaluation of stream and wetland restoration using UAS-based thermal infrared mapping. Water 2019, 11, 1568. [Google Scholar] [CrossRef] [Green Version]
- Byerlay, R.A.E.; Coates, C.; Aliabadi, A.A.; Kevan, P.G. In situ calibration of an uncooled thermal camera for the accurate quantification of flower and stem surface temperatures. Thermochim. Acta 2020, 693, 178779. [Google Scholar] [CrossRef]
- Han, Y.; Tarakey, B.A.; Hong, S.-J.; Kim, S.-Y.; Kim, E.; Lee, C.-H.; Kim, G. Calibration and Image Processing of Aerial Thermal Image for UAV Application in Crop Water Stress Estimation. J. Sens. 2021, 2021, 5537795. [Google Scholar] [CrossRef]
- Yuan, W.; Choi, D. UAV-Based Heating Requirement Determination for Frost Management in Apple Orchard. Remote Sens. 2021, 13, 273. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | DJI Zenmuse XT2 | FLIR Duo R |
|---|---|---|
| Size | 118.02 × 111.6 × 125.5 mm3 | 41 × 59 × 29.6 mm3 |
| Weight | 588 g | 84 g |
| Thermal imager | Uncooled VOx microbolometer | |
| Resolution | 640 × 512 | 160 × 120 |
| Field of view (FOV) | 32° × 26° | 57° × 44° |
| Spectral band | 7.5–13.5 µm | |
| Scene temperature range | High gain −25–135 °C low gain −40–550 °C | N/A |
| Accuracy | ±10 °C | ±5 °C |
| Operating temperature range | N/A | 0–50 °C |
| Storage temperature range | N/A | −20–60 °C |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, W.; Hua, W. A Case Study of Vignetting Nonuniformity in UAV-Based Uncooled Thermal Cameras. Drones 2022, 6, 394. https://doi.org/10.3390/drones6120394
Yuan W, Hua W. A Case Study of Vignetting Nonuniformity in UAV-Based Uncooled Thermal Cameras. Drones. 2022; 6(12):394. https://doi.org/10.3390/drones6120394
Chicago/Turabian StyleYuan, Wenan, and Weiyun Hua. 2022. "A Case Study of Vignetting Nonuniformity in UAV-Based Uncooled Thermal Cameras" Drones 6, no. 12: 394. https://doi.org/10.3390/drones6120394
APA StyleYuan, W., & Hua, W. (2022). A Case Study of Vignetting Nonuniformity in UAV-Based Uncooled Thermal Cameras. Drones, 6(12), 394. https://doi.org/10.3390/drones6120394