

Drone-Based Atmospheric Soundings Up to an Altitude of 10 km-Technical Approach towards Operations
 , , , , , , , and
, , , , , , , and
Abstract
:1. Introduction
1.1. Why Do We Need Atmospheric Soundings with UAS?
1.2. State-of-the-Art Atmospheric Soundings with UAS
2. Materials and Methods
2.1. Requirements for Drone-Based Meteorological Sounding
2.1.1. Payload Requirements
2.1.2. Atmospheric Conditions
2.1.3. Operations Requirements
2.1.4. Summary of Boundary Conditions and Requirements for the UAS
2.2. Concept Development
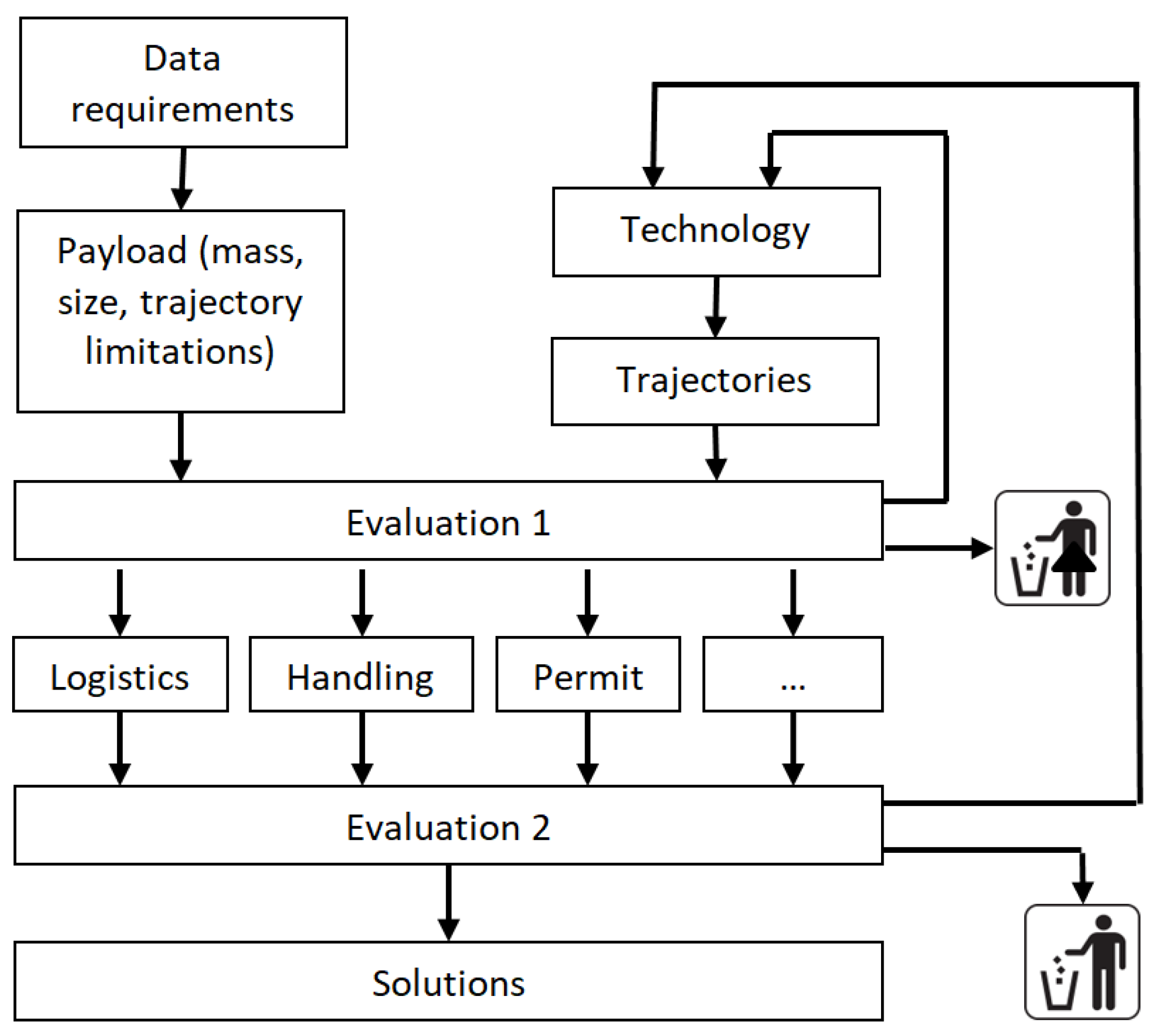
2.2.1. Solution Space and Concept Selection
- Ascent technologyOverarching technical possibilities to reach the altitude of 10 km; an ascent using aerostatic lift (balloon), ascending using its own propulsion, and a launch from a high altitude platform were considered.
- Trajectory typeThe UAS may drift with the wind or stay inside the dedicated airspace over the launch site.
- Propulsion typePossible options for the UAS, rocket, jet, and propellers powered by a gas- or electric engine, as well as systems without engines, have been identified.
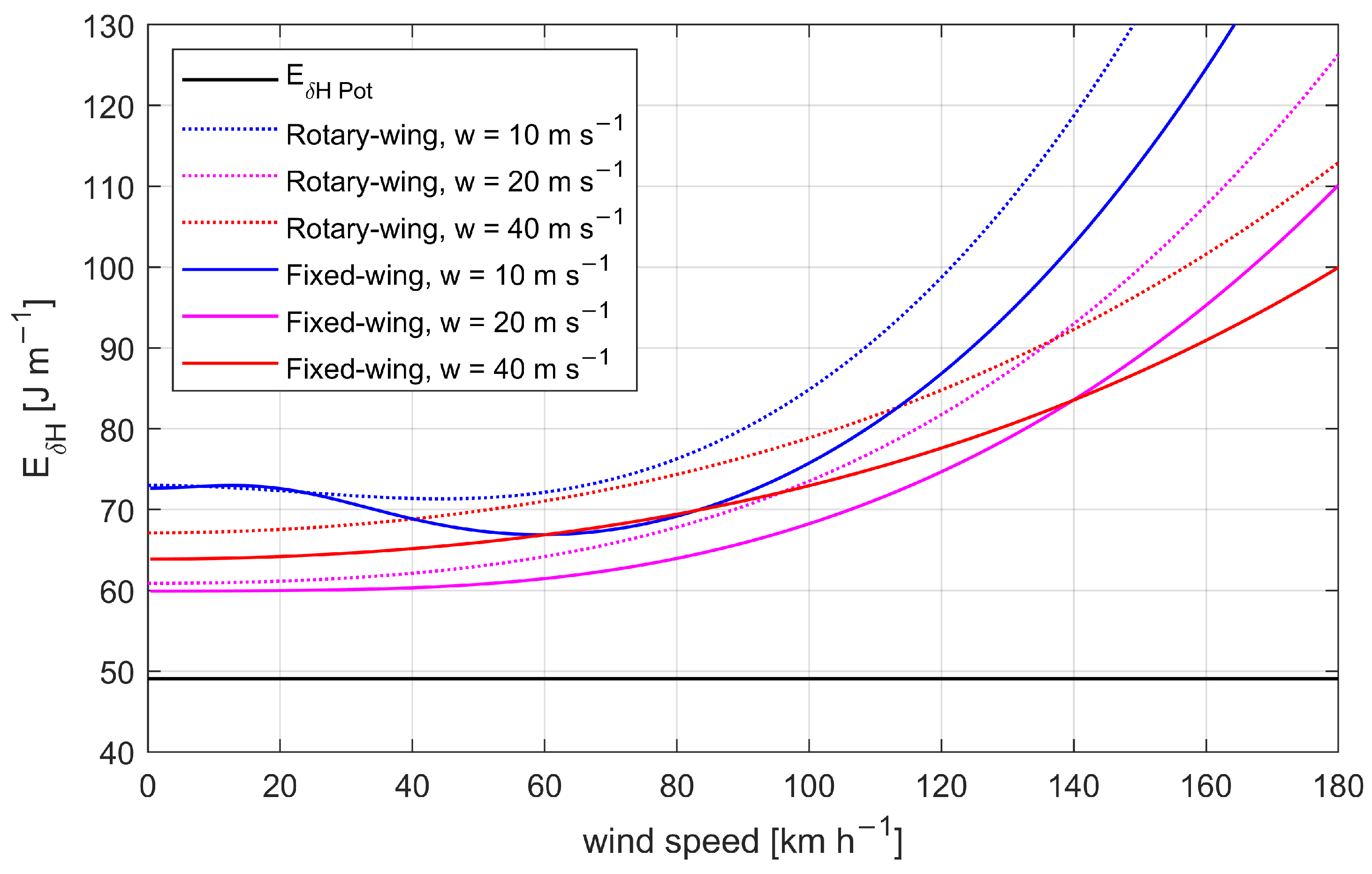
- Platform typeOptions for the platform, rotary wing, fixed-wing, airship, and steerable bodies (e.g., rocket) have been considered.
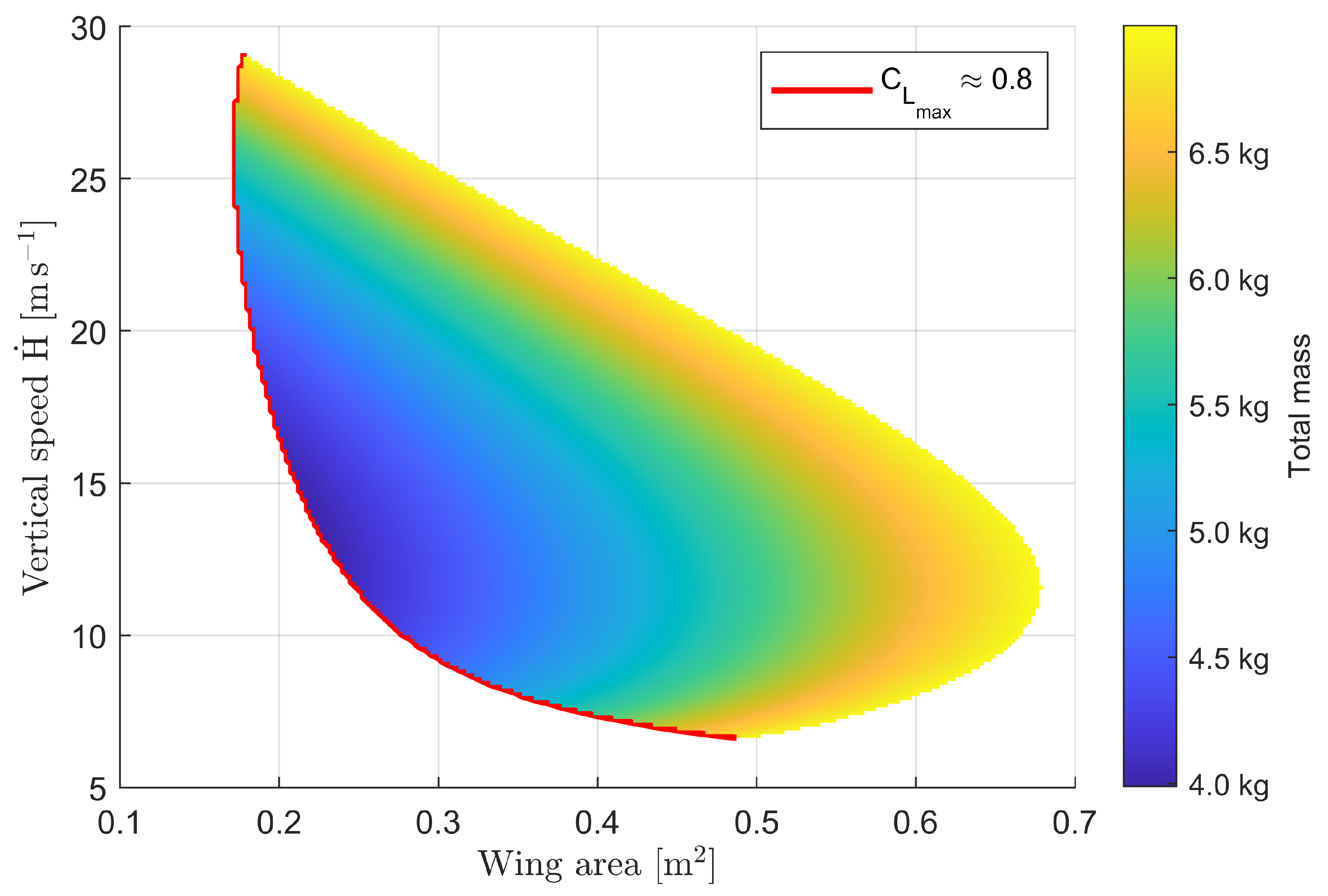
2.2.2. Parametric Design Approach
- -the payload weight is assumed to be a fixed value;
- -the airframe weight can be considered to be proportional to the total mass;
- -the motor mass can be estimated as a function of maximum continuous shaft power;
- -and the battery mass depends on the energy needs including some overhead.
3. Results
3.1. Air and Ground Segment of the UAS
3.1.1. Strategy to Mitigate the Risk of In-Flight Icing
- Situational awareness through the consultation of the forecast, in particular, the explicit forecast and now-cast of icing, humidity, liquid water content, and the presence of clouds.
- Detection of in-flight icing by using the onboard ice detection sensor and checking the consistency of performance data in combination with the probability of icing occurrence.
- Operational Procedures defined in the concept of operations based on a decision tree, to either climb through the icing zone, return to launch and recover the aircraft, or delay/cancel the operation prior to the UAS launch.
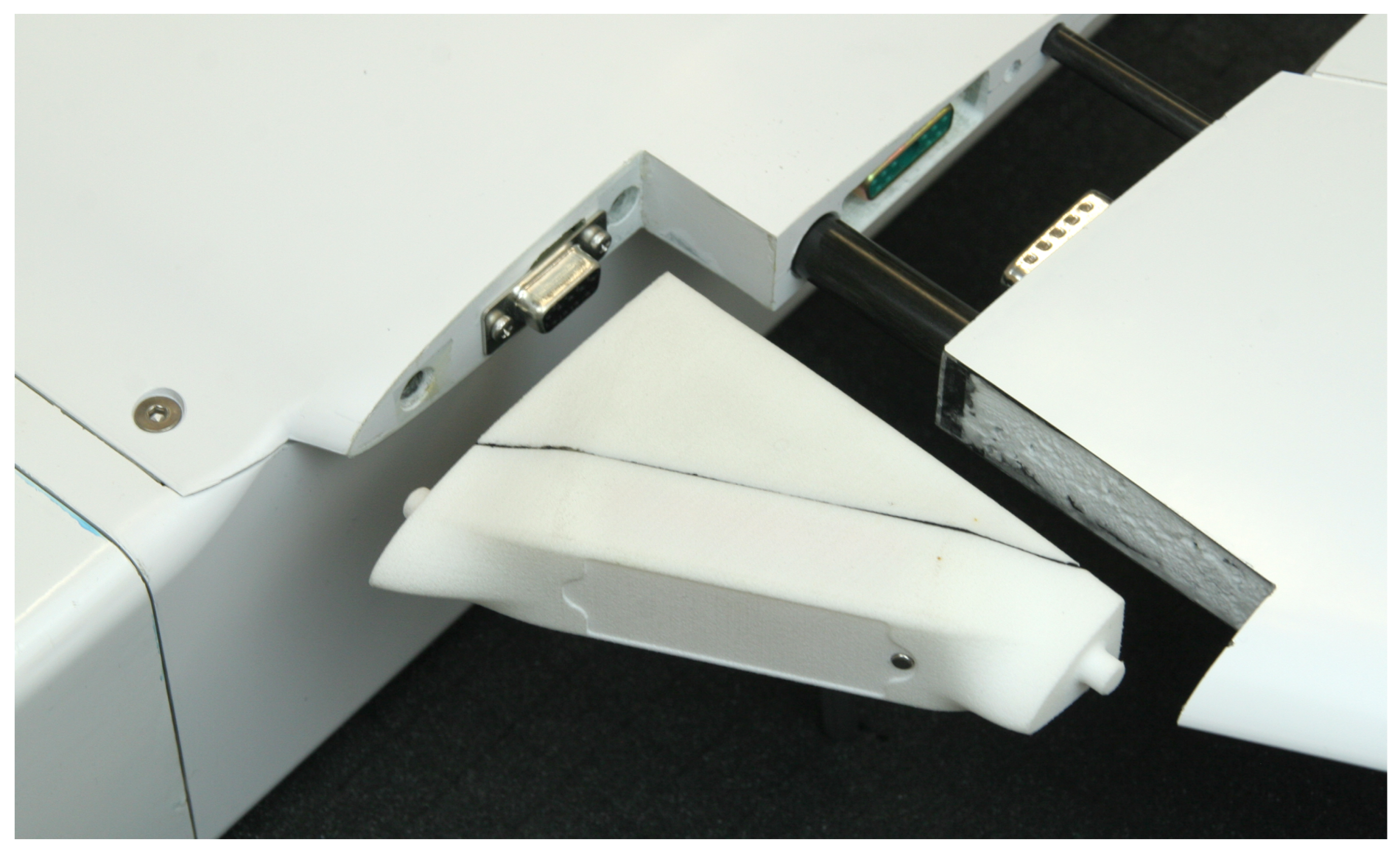
3.1.2. Air Segment
3.1.3. Ground Control Station
3.1.4. Launch and Landing Concept
3.2. Flight Tests and First Measurements
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Meteorological Organisation (WMO). GCOS, 171. The GCOS Reference Upper-Air Network (GRUAN): Guide; WMO: Geneva, Switzerland, 2013. [Google Scholar]
- Durre, I.; Yin, X.; Vose, R.S.; Applequist, S.; Arnfield, J. Enhancing the Data Coverage in the Integrated Global Radiosonde Archive. J. Atmos. Ocean. Technol. 2018, 35, 1753–1770. [Google Scholar] [CrossRef]
- NOAA-AMDAR. Available online: https://amdar.noaa.gov/ (accessed on 14 October 2022).
- Jonassen, M.O.; Ólafsson, H.; Ágústsson, H.; Rögnvaldsson, Ó.; Reuder, J. Improving High-Resolution Numerical Weather Simulations by Assimilating Data from an Unmanned Aerial System. Mon. Weather Rev. 2012, 140, 3734–3756. [Google Scholar] [CrossRef] [Green Version]
- Flagg, D.D.; Doyle, J.D.; Holt, T.R.; Tyndall, D.P.; Amerault, C.M.; Geiszler, D.; Haack, T.; Moskaitis, J.R.; Nachamkin, J.; Eleuterio, D.P. On the Impact of Unmanned Aerial System Observations on Numerical Weather Prediction in the Coastal Zone. Mon. Weather Rev. 2018, 146, 599–622. [Google Scholar] [CrossRef]
- Rendón, A.M.; Salazar, J.F.; Palacio, C.A.; Wirth, V.; Brötz, B. Effects of Urbanization on the Temperature Inversion Breakup in a Mountain Valley with Implications for Air Quality. J. Appl. Meteorol. Climatol. 2014, 53, 840–858. [Google Scholar] [CrossRef]
- Glojek, K.; Močnik, G.; Alas, H.D.C.; Cuesta-Mosquera, A.; Drinovec, L.; Gregorič, A.; Ogrin, M.; Weinhold, K.; Ježek, I.; Müller, T.; et al. The Impact of Temperature Inversions on Black Carbon and Particle Mass Concentrations in a Mountainous Area. Atmos. Chem. Phys. 2022, 22, 5577–5601. [Google Scholar] [CrossRef]
- Sun, Q.; Vihma, T.; Jonassen, M.O.; Zhang, Z. Impact of Assimilation of Radiosonde and UAV Observations from the Southern Ocean in the Polar WRF Model. Adv. Atmos. Sci. 2020, 37, 441–454. [Google Scholar] [CrossRef] [Green Version]
- Evans, M.; Knippertz, P.; Akpo, A.; Allan, R.P.; Amekudzi, L.; Brooks, B.; Chiu, J.C.; Coe, H.; Fink, A.H.; Flamant, C.; et al. Policy Findings from the DACCIWA Project; Technical Report; Zenodo: Geneva, Switzerland, 2018. [Google Scholar]
- Bromwich, D.H.; Werner, K.; Casati, B.; Powers, J.G.; Gorodetskaya, I.V.; Massonnet, F.; Vitale, V.; Heinrich, V.J.; Liggett, D.; Arndt, S.; et al. The Year of Polar Prediction in the Southern Hemisphere (YOPP-SH). Bull. Am. Meteorol. Soc. 2020, 101, E1653–E1676. [Google Scholar] [CrossRef]
- Pinto, J.O.; O’Sullivan, D.; Taylor, S.; Elston, J.; Baker, C.B.; Hotz, D.; Marshall, C.; Jacob, J.; Barfuss, K.; Piguet, B.; et al. The Status and Future of Small Uncrewed Aircraft Systems (UAS) in Operational Meteorology. Bull. Am. Meteorol. Soc. 2021, 102, E2121–E2136. [Google Scholar]
- Leuenberger, D.; Haefele, A.; Omanovic, N.; Fengler, M.; Martucci, G.; Calpini, B.; Fuhrer, O.; Rossa, A. Improving High-Impact Numerical Weather Prediction with Lidar and Drone Observations. Bull. Am. Meteorol. Soc. 2020, 101, E1036–E1051. [Google Scholar] [CrossRef] [Green Version]
- All-Weather Drone. Available online: https://projekte.ffg.at/projekt/4119066 (accessed on 6 October 2022).
- Kräuchi, A.; Philipona, R. Return Glider Radiosonde for in Situ Upper-Air Research Measurements. Atmos. Meas. Tech. 2016, 9, 2535–2544. [Google Scholar] [CrossRef] [Green Version]
- Schuyler, T.J.; Gohari, S.M.I.; Pundsack, G.; Berchoff, D.; Guzman, M.I. Using a Balloon-Launched Unmanned Glider to Validate Real-Time WRF Modeling. Sensors 2019, 19, 1914. [Google Scholar] [CrossRef] [PubMed]
- Secretariat of the Antarctic Treaty. Compilation of Key Documents of the Antarctic Treaty, 4th ed.; Secretariat of the Antarctic Treaty: Buenos Aires, Argentina, 2019. [Google Scholar]
- Schmithüsen, H. Radiosonde Measurements from Neumayer Station (1983-02 et Seq). 2022. Available online: https://doi.pangaea.de/10.1594/PANGAEA.940584 (accessed on 3 September 2022).
- Wetter Und Klima-Deutscher Wetterdienst-Our Services-Open Data Server. Available online: https://www.dwd.de/EN/ourservices/opendata/opendata.html (accessed on 6 October 2022).
- WMO. AMDAR Reference Manual: Aircraft Meteorological Data Relay; Number 958 in WMO; Secretariat of the World Meteorological Organization: Geneva, Switzerland, 2003. [Google Scholar]
- Wang, J.; Hock, T.; Cohn, S.A.; Martin, C.; Potts, N.; Reale, T.; Sun, B.; Tilley, F. Unprecedented Upper-Air Dropsonde Observations over Antarctica from the 2010 Concordiasi Experiment: Validation of Satellite-Retrieved Temperature Profiles. Geophys. Res. Lett. 2013, 40, 1231–1236. [Google Scholar] [CrossRef]
- WMO. Global Observing System. Available online: https://public.wmo.int/en/programmes/global-observing-system (accessed on 16 July 2022).
- WMO. Guide to Instruments and Methods of Observation, 2018th ed.; Number 8 in WMO; WMO: Geneva, Switzerland, 2018. [Google Scholar]
- WMO. OSCAR-Observing Systems Capability Analysis and Review Tool; WMO: Geneva, Switzerland, 2015. [Google Scholar]
- Bärfuss, K.; Pätzold, F.; Altstädter, B.; Kathe, E.; Nowak, S.; Bretschneider, L.; Bestmann, U.; Lampert, A. New Setup of the UAS ALADINA for Measuring Boundary Layer Properties, Atmospheric Particles and Solar Radiation. Atmosphere 2018, 9, 28. [Google Scholar] [CrossRef] [Green Version]
- Majewski, J. The Dynamic Behaviour of Capacitive Humidity Sensors. Devices Methods Meas. 2020, 11, 53–59. [Google Scholar] [CrossRef]
- Stickney, T.M.; Shedlov, M.W.; Thompson, D.I. Goodrich Total Temperature Sensors; Technical Report; Goodrich: Burnsville, MN, USA, 1994. [Google Scholar]
- Wilson, T.C.; Brenner, J.; Morrison, Z.; Jacob, J.D.; Elbing, B.R. Wind Speed Statistics from a Small UAS and Its Sensitivity to Sensor Location. Atmosphere 2022, 13, 443. [Google Scholar] [CrossRef]
- Rautenberg, A.; Graf, M.S.; Wildmann, N.; Platis, A.; Bange, J. Reviewing Wind Measurement Approaches for Fixed-Wing Unmanned Aircraft. Atmosphere 2018, 9, 422. [Google Scholar] [CrossRef] [Green Version]
- Witte, B.M.; Singler, R.F.; Bailey, S.C.C. Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer. Atmosphere 2017, 8, 195. [Google Scholar] [CrossRef] [Green Version]
- Alaoui-Sosse, S.; Durand, P.; Medina, P.; Pastor, P.; Lothon, M.; Cernov, I. OVLI-TA: An Unmanned Aerial System for Measuring Profiles and Turbulence in the Atmospheric Boundary Layer. Sensors 2019, 19, 581. [Google Scholar] [CrossRef] [Green Version]
- Schmithüsen, H. Meteorological Synoptical Observations from Neumayer Station, 1981-01 to 2019-01, Reference List of 457 Datasets. Available online: https://doi.pangaea.de/10.1594/PANGAEA.911242 (accessed on 21 February 2022).
- Sørensen, K.L.; Borup, K.T.; Hann, R.; Hansbø, M. UAV Atmospheric Icing Limitations, Climate Report for Norway and Surrounding Regions; Technical Report; UBIQ Aerospace: Trondheim, Norway, 2021. [Google Scholar]
- Bernstein, B.C.; McDonough, F.; Politovich, M.K.; Brown, B.G.; Ratvasky, T.P.; Miller, D.R.; Wolff, C.A.; Cunning, G. Current Icing Potential: Algorithm Description and Comparison with Aircraft Observations. J. Appl. Meteorol. Climatol. 2005, 44, 969–986. [Google Scholar] [CrossRef]
- EASA. Easy Access Rules for Unmanned Aircraft Systems (Regulation (EU) 2019/947 and Regulation (EU) 2019/945). Available online: https://www.easa.europa.eu/document-library/easy-access-rules/easy-access-rules-unmanned-aircraft-systems-regulation-eu (accessed on 7 February 2022).
- JARUS 2021 Spring Virtual Plenary Meeting Information | JARUS. Available online: http://jarus-rpas.org/ (accessed on 14 October 2022).
- Beaumont, N.J.; Aanesen, M.; Austen, M.C.; Börger, T.; Clark, J.R.; Cole, M.; Hooper, T.; Lindeque, P.K.; Pascoe, C.; Wyles, K.J. Global Ecological, Social and Economic Impacts of Marine Plastic. Mar. Pollut. Bull. 2019, 142, 189–195. [Google Scholar] [CrossRef]
- Gallo, F.; Fossi, C.; Weber, R.; Santillo, D.; Sousa, J.; Ingram, I.; Nadal, A.; Romano, D. Marine Litter Plastics and Microplastics and Their Toxic Chemicals Components: The Need for Urgent Preventive Measures. Environ. Sci. Eur. 2018, 30, 13. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Hoekstra, J.M.; Ellerbroek, J. Aircraft Drag Polar Estimation Based on a Stochastic Hierarchical Model. In Proceedings of the Eighth SESAR Innovation Days, Salzburg, Austria, 3–7 December 2018. [Google Scholar]
- van der Wall, B.G. Grundlagen der Hubschrauber-Aerodynamik, 1st ed.; VDI-Buch; Springer: Wiesbaden, Germany, 2015. [Google Scholar]
- Lee, A.Y.; Bryson, A.E.; Hindson, W.S. Optimal Landing of a Helicopter in Autorotation. J. Guid. Control. Dyn. 1988, 11, 7–12. [Google Scholar] [CrossRef] [Green Version]
- Merchant, M.; Miller, L.S. Propeller performance measurement for low Reynolds number UAV applications. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9 January 2006–12 January 2006; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2006. [Google Scholar]
- Schlichting, H.; Truckenbrodt, E. Aerodynamik des Flugzeuges: Zweiter Band: Aerodynamik des Tragflügels (Teil II), des Rumpfes, der Flügel-Rumpf-Anordnungen und der Leitwerke; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Sadraey, M. Design of Unmanned Aerial Systems; Wiley: Hoboken, NJ, USA, 2020. [Google Scholar]
- Sforza, P.M. Theory of Aerospace Propulsion, 2nd ed.; Aerospace Engineering; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Bernstein, B.C.; Rasmussen, R.M.; McDonough, F.; Wolff, C. Keys to Differentiating between Small- and Large-Drop Icing Conditions in Continental Clouds. J. Appl. Meteorol. Climatol. 2019, 58, 1931–1953. [Google Scholar] [CrossRef]
- Hann, R.; Johansen, T.A. Unsettled Topics in Unmanned Aerial Vehicle Icing; SAE Technical Paper EPR2020008; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- Hann, R.; Enache, A.; Nielsen, M.C.; Stovner, B.N.; van Beeck, J.; Johansen, T.A.; Borup, K.T. Experimental Heat Loads for Electrothermal Anti-Icing and De-Icing on UAVs. Aerospace 2021, 8, 83. [Google Scholar] [CrossRef]
- Kalinka, F.; Roloff, K.; Tendel, J.; Hauf, T. The In-flight Icing Warning System ADWICE for European Airspace – Current Structure, Recent Improvements and Verification Results. Meteorol. Z. 2017, 4, 441–455. [Google Scholar] [CrossRef]
- Petäjä, T.; Tabakova, K.; Manninen, A.; Ezhova, E.; O’Connor, E.; Moisseev, D.; Sinclair, V.A.; Backman, J.; Levula, J.; Luoma, K.; et al. Influence of Biogenic Emissions from Boreal Forests on Aerosol–Cloud Interactions. Nat. Geosci. 2022, 15, 42–47. [Google Scholar] [CrossRef]
- Luke, E.P.; Kollias, P.; Shupe, M.D. Detection of Supercooled Liquid in Mixed-Phase Clouds Using Radar Doppler Spectra. J. Geophys. Res. Atmos. 2010, 115, D19. [Google Scholar] [CrossRef] [Green Version]
- Bühl, J.; Seifert, P.; Myagkov, A.; Ansmann, A. Measuring Ice- and Liquid-Water Properties in Mixed-Phase Cloud Layers at the Leipzig Cloudnet Station. Atmos. Chem. Phys. 2016, 16, 10609–10620. [Google Scholar] [CrossRef] [Green Version]
- Gaussiat, N.; Hogan, R.J.; Illingworth, A.J. Accurate Liquid Water Path Retrieval from Low-Cost Microwave Radiometers Using Additional Information from a Lidar Ceilometer and Operational Forecast Models. J. Atmos. Ocean. Technol. 2007, 24, 1562–1575. [Google Scholar] [CrossRef]
- Rotondo, D.; Cristofaro, A.; Johansen, T.A.; Nejjari, F.; Puig, V. Robust Fault and Icing Diagnosis in Unmanned Aerial Vehicles Using LPV Interval Observers. Int. J. Robust Nonlinear Control 2019, 29, 5456–5480. [Google Scholar] [CrossRef]
- Siquig, R. Impact of Icing on Unmanned Aerial Vehicle (UAV) Operations; Technical Report ADA231191; Naval Environmental Prediction Research: Facility Monterey, CA, USA, 1990. [Google Scholar]
- Cober, S.G.; Isaac, G.A. Characterization of Aircraft Icing Environments with Supercooled Large Drops for Application to Commercial Aircraft Certification. J. Appl. Meteorol. Climatol. 2012, 51, 265–284. [Google Scholar] [CrossRef]
- Open Flightmaps|Aeronautical Data under a Public License. Available online: https://www.openflightmaps.org/ (accessed on 14 October 2022).
- Bärfuss, K.B.; Schmithüsen, H.; Lampert, A. Drone-Based Meteorological Observations up to the Tropopause. Atmos. Meas. Tech. Discuss. 2022, 2022, 1–26. [Google Scholar]
- Bärfuss, K.; Schmithüsen, H.; Dirksen, R.; Bretschneider, L.; Pätzold, F.; Bollmann, S.; Wickboldt, H.; von Unwerth, M.; Asmussen, M.; Schwarting, T.; et al. Radiosonde Measurements Co-Located with Ascends of the Unmanned Aerial System LUCA (Panker, Germany 2020-07-03 and 2021-05-28), PANGAEA, 2021. Available online: https://doi.pangaea.de/10.1594/PANGAEA.937556 (accessed on 22 October 2022).
- Bärfuss, K.; Schmithüsen, H.; Dirksen, R.; Bretschneider, L.; Pätzold, F.; Bollmann, S.; Wickboldt, H.; von Unwerth, M.; Asmussen, M.; Schwarting, T.; et al. Atmospheric Profile Measurements Conducted by the Unmanned Aerial System LUCA (Panker, Germany 2020-07-03 and 2021-05-28), PANGAEA, 2021. Available online: https://doi.pangaea.de/10.1594/PANGAEA.937555 (accessed on 22 October 2022).
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- WMO. WMO UAS Demonstration Campaign Description|World Meteorological Organization. Available online: https://community.wmo.int/uas-demonstration/description (accessed on 16 February 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pressure | Temperature | Specific Humidity | Wind (Horizontal) | Wind (Vertical) |
|---|---|---|---|---|
| 0.6 hPa | 1 K | 5% | 2 m s | 0.02 m s |
| Site | GND | 8 km AMSL | Max. Wind |
|---|---|---|---|
| Lindenberg | 30 km h | 140 km h | 170 km h |
| Neumayer | 80 km h | 115 km h | 125 km h |
| Date/Time | Pressure | Temperature | Dew Point | Wind FF | Wind DD |
|---|---|---|---|---|---|
| 25 October 2021 09:41 | 0.5 hPa | 1 K | 4.8 K | 2.7 m s | 5° |
| 26 October 2021 08:45 | 1.7 hPa | 2.6 K | 3.9 K | 2.2 m s | 7.6° |
| Date and Time | Altitude Reached | Wind Speed (Maximum) | Temperature (Minimum) |
|---|---|---|---|
| 03 July 2020 08:11 | 3.3 km | 55 km h | −4 °C |
| 28 May 2021 09:24 | 4.6 km | 60 km h | −20 °C |
| 28 September 2021 13:24 | 7.9 km | 60 km h | −35 °C |
| 25 October 2021 09:41 | 3.8 km | 65 km h | −8 °C |
| 25 October 2021 12:34 | 8.8 km | 100 km h | −45 °C |
| 26 October 2021 08:45 | 10.0 km | 90 km h | −50 °C |
| 28 October 2021 07:20 | 9.9 km | 60 km h | −47 °C |
| 28 October 2021 13:07 | 8.8 km | 80 km h | −38 °C |
| 29 October 2021 07:22 | 8.9 km | 85 km h | −42 °C |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bärfuss, K.; Dirksen, R.; Schmithüsen, H.; Bretschneider, L.; Pätzold, F.; Bollmann, S.; Panten, P.; Rausch, T.; Lampert, A. Drone-Based Atmospheric Soundings Up to an Altitude of 10 km-Technical Approach towards Operations. Drones 2022, 6, 404. https://doi.org/10.3390/drones6120404
Bärfuss K, Dirksen R, Schmithüsen H, Bretschneider L, Pätzold F, Bollmann S, Panten P, Rausch T, Lampert A. Drone-Based Atmospheric Soundings Up to an Altitude of 10 km-Technical Approach towards Operations. Drones. 2022; 6(12):404. https://doi.org/10.3390/drones6120404
Chicago/Turabian StyleBärfuss, Konrad, Ruud Dirksen, Holger Schmithüsen, Lutz Bretschneider, Falk Pätzold, Sven Bollmann, Philippe Panten, Thomas Rausch, and Astrid Lampert. 2022. "Drone-Based Atmospheric Soundings Up to an Altitude of 10 km-Technical Approach towards Operations" Drones 6, no. 12: 404. https://doi.org/10.3390/drones6120404