
An Experimental Apparatus for Icing Tests of Low Altitude Hovering Drones



Abstract
:1. Introduction
2. Materials and Methods: Icing Precipitation
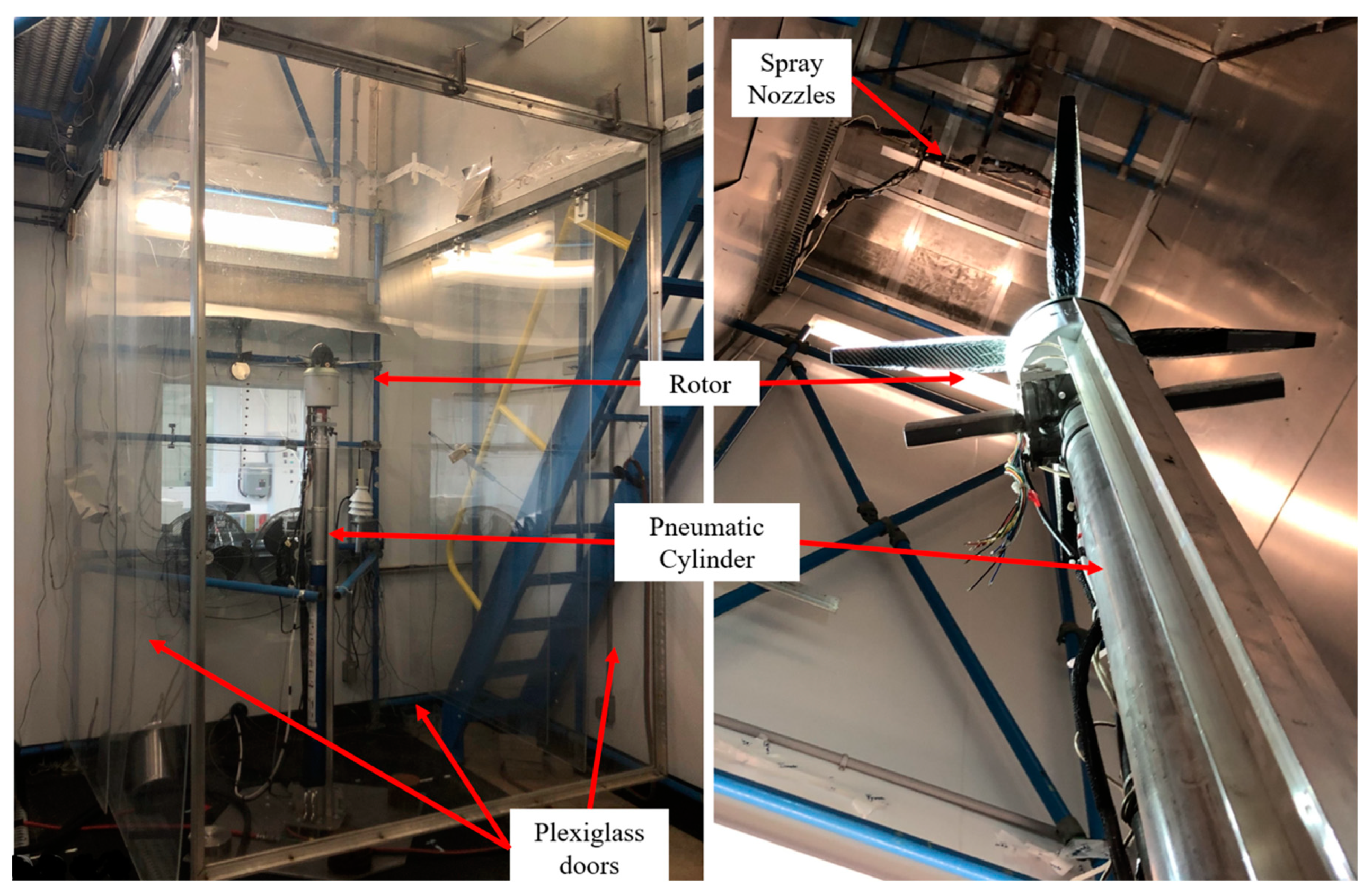
2.1. Cold Chamber Characteristics
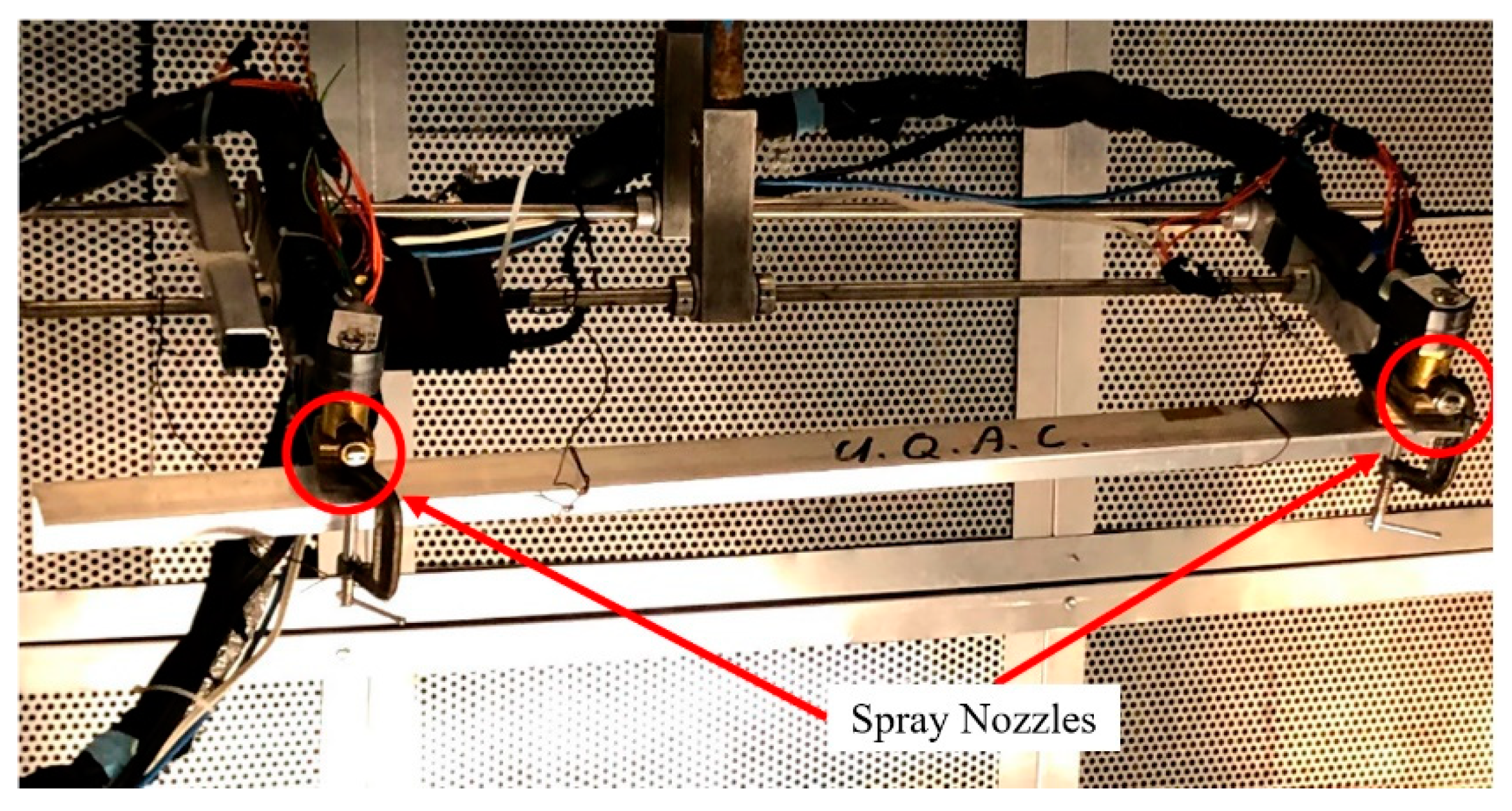
2.2. Icing Nozzle Array
2.3. MVD Measurement
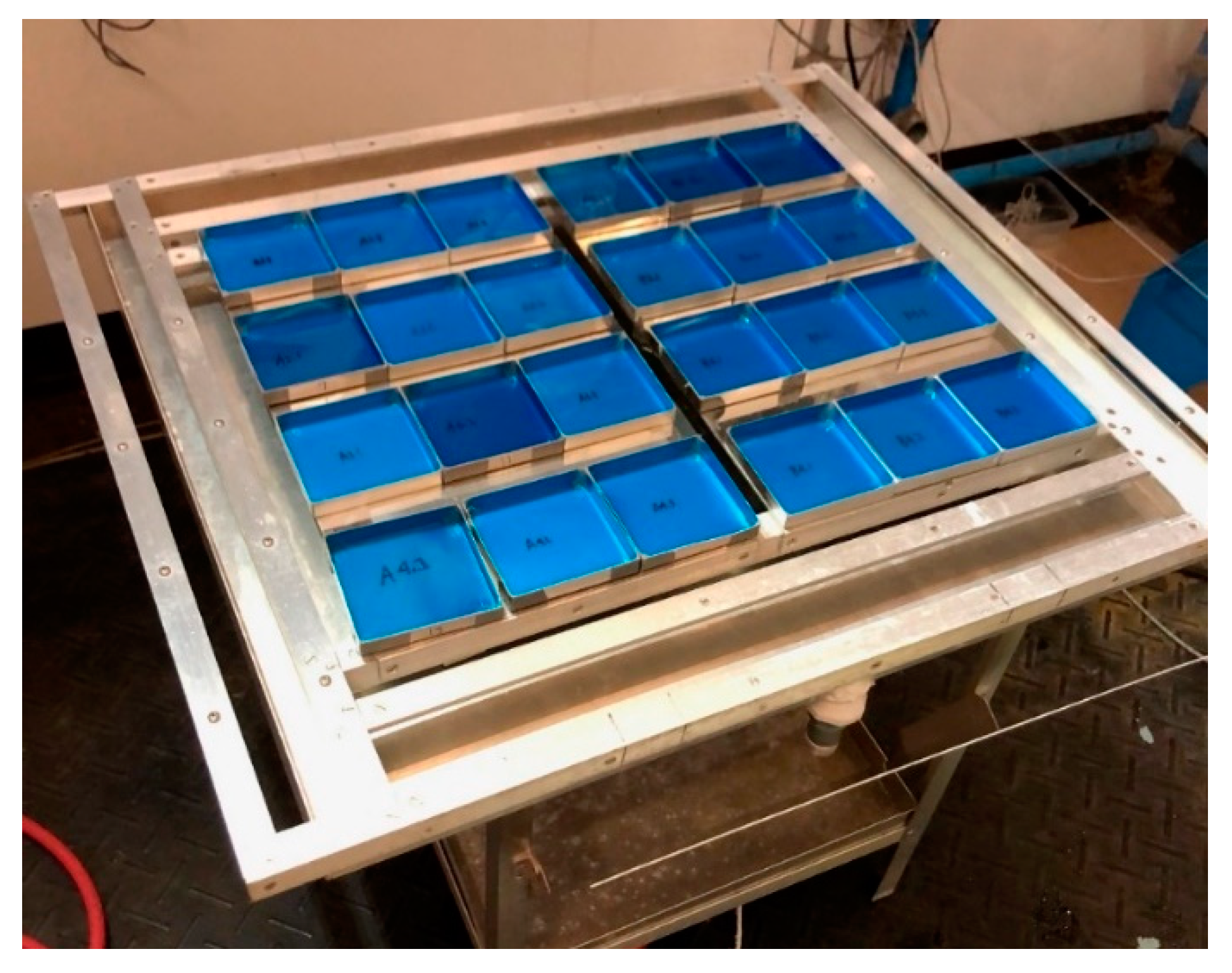
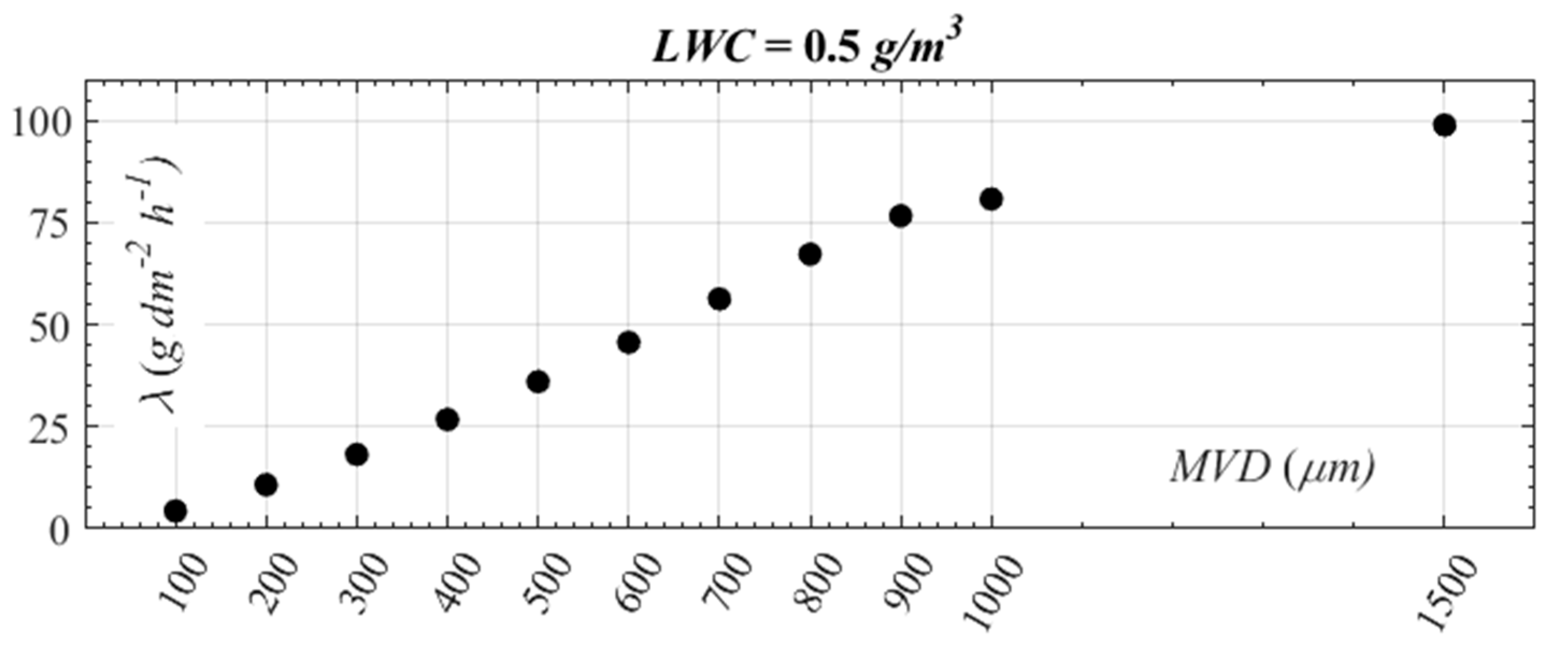
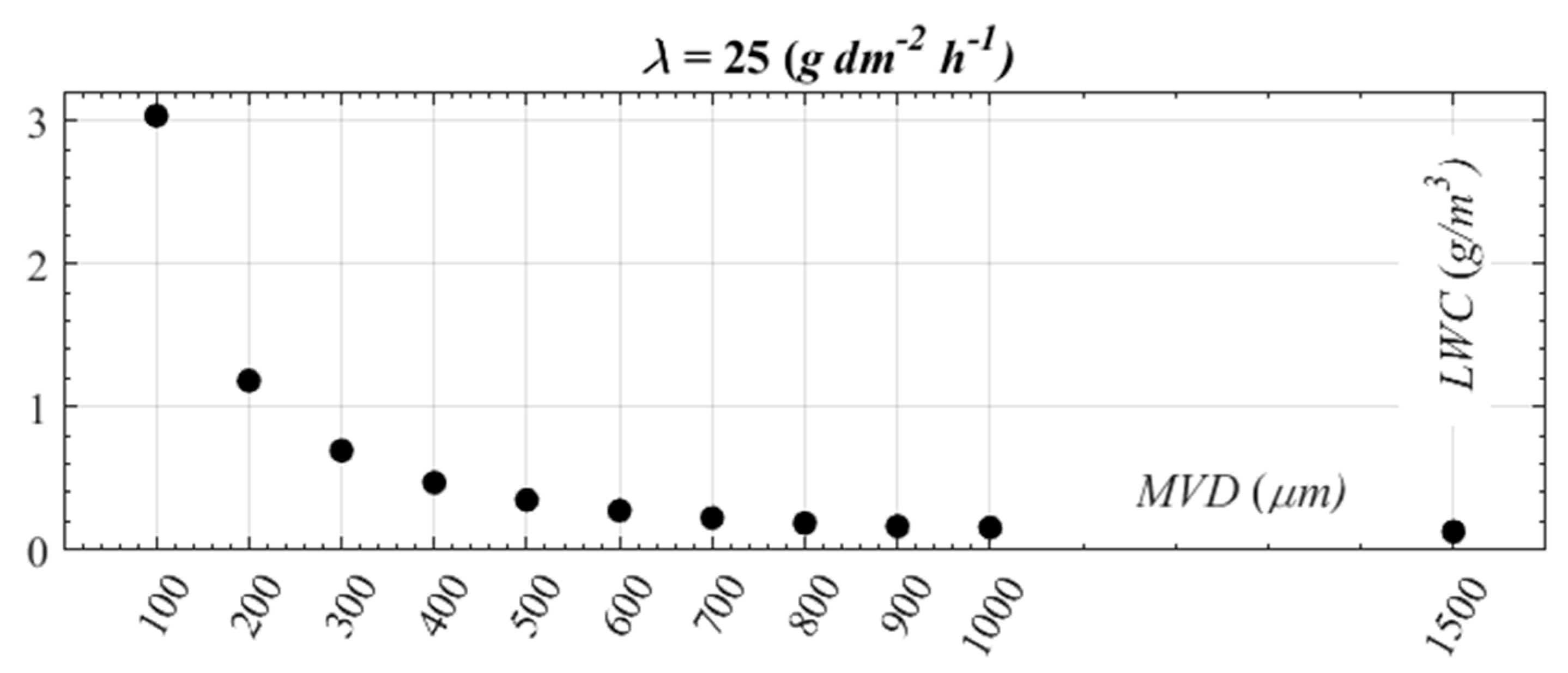
2.4. Precipitation Rate
2.5. LWC Estimation and Droplet Velocities
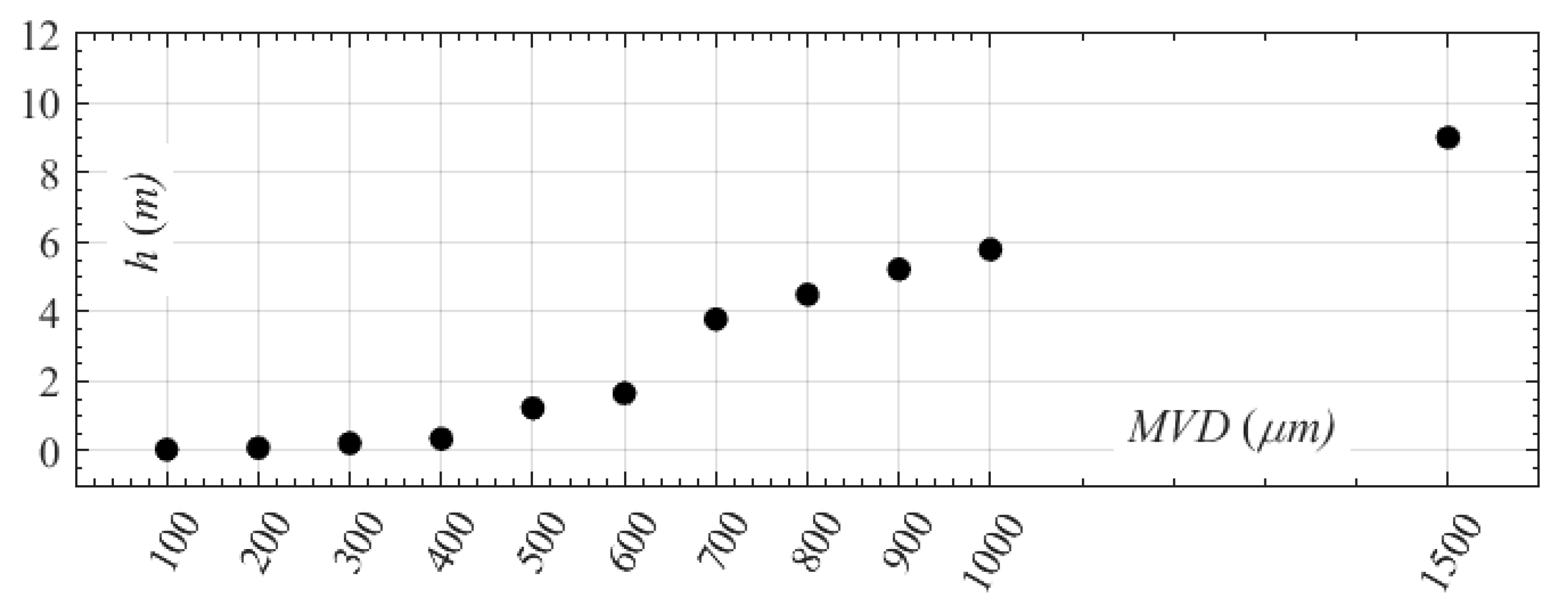
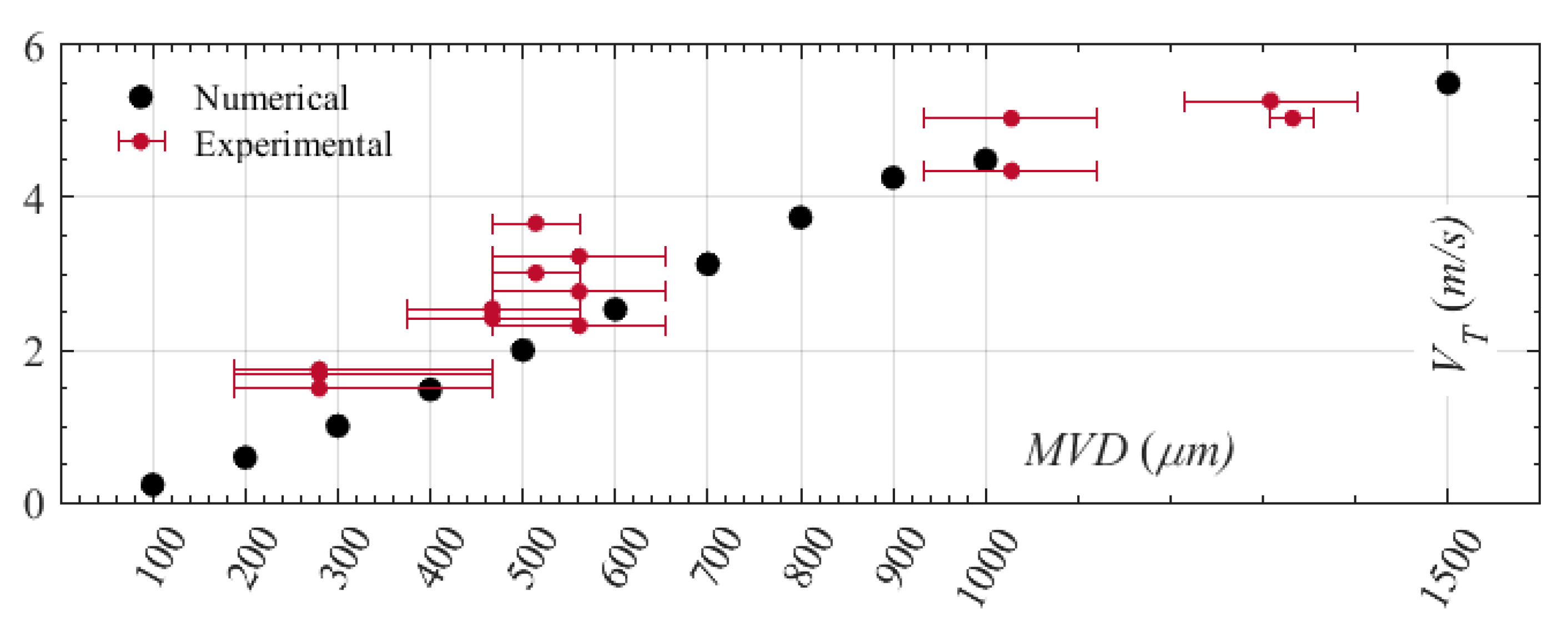
2.6. Tracking the Droplets’ Terminal Velocity
2.7. Ice Shape Documentation & Measurements
2.8. Icing Conditions
3. Materials and Methods: Drone Rotor Setup
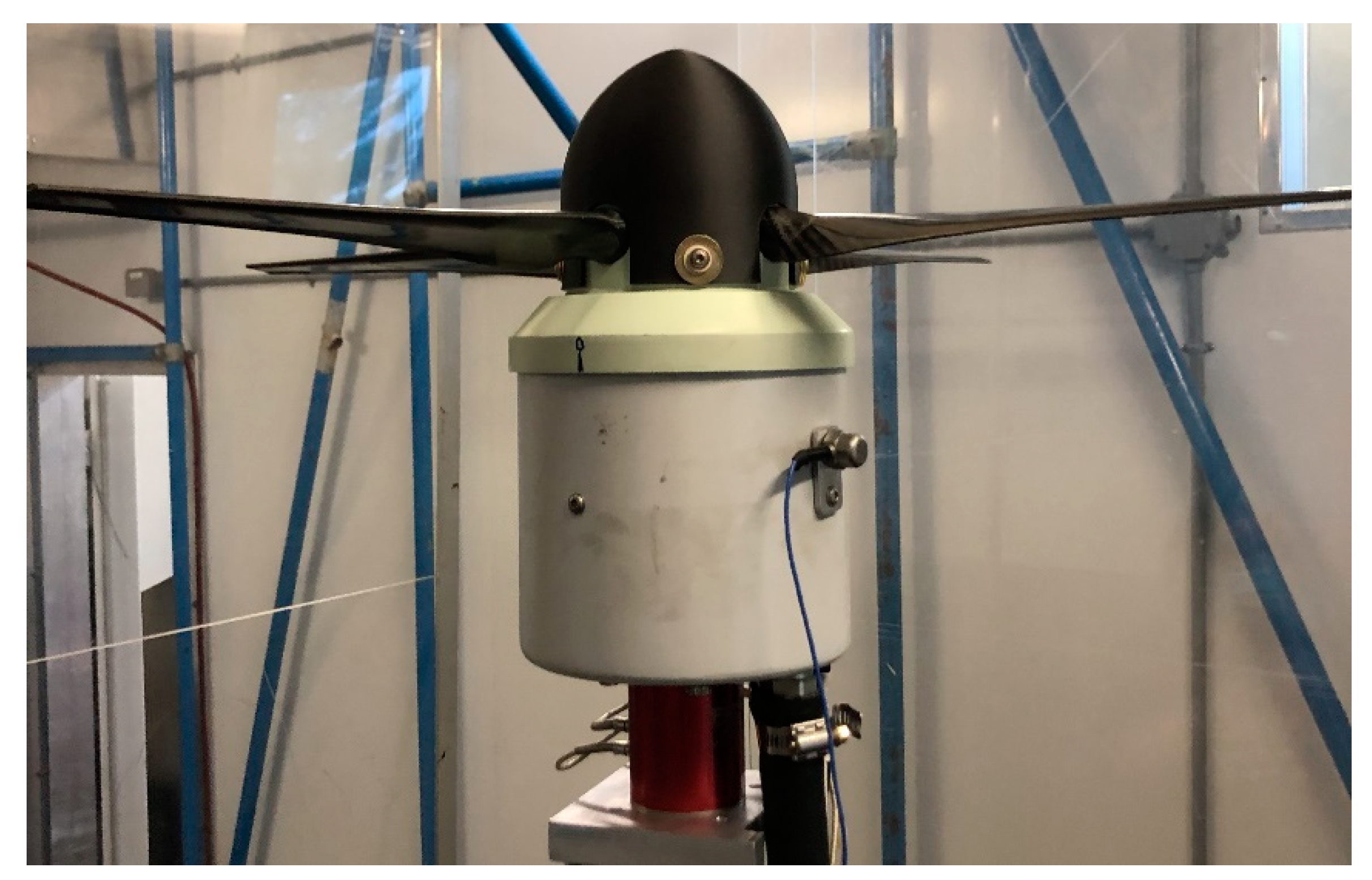
3.1. Drone Rotor Assembly
3.2. Rotor Test Parameters
3.3. Testing Procedure
- The motor cooling air is first turned on, followed by the power supply for the motor. The rotor spin safety switch is then deactivated, and the test begins. The test is initiated in the software and data acquisition starts recording.
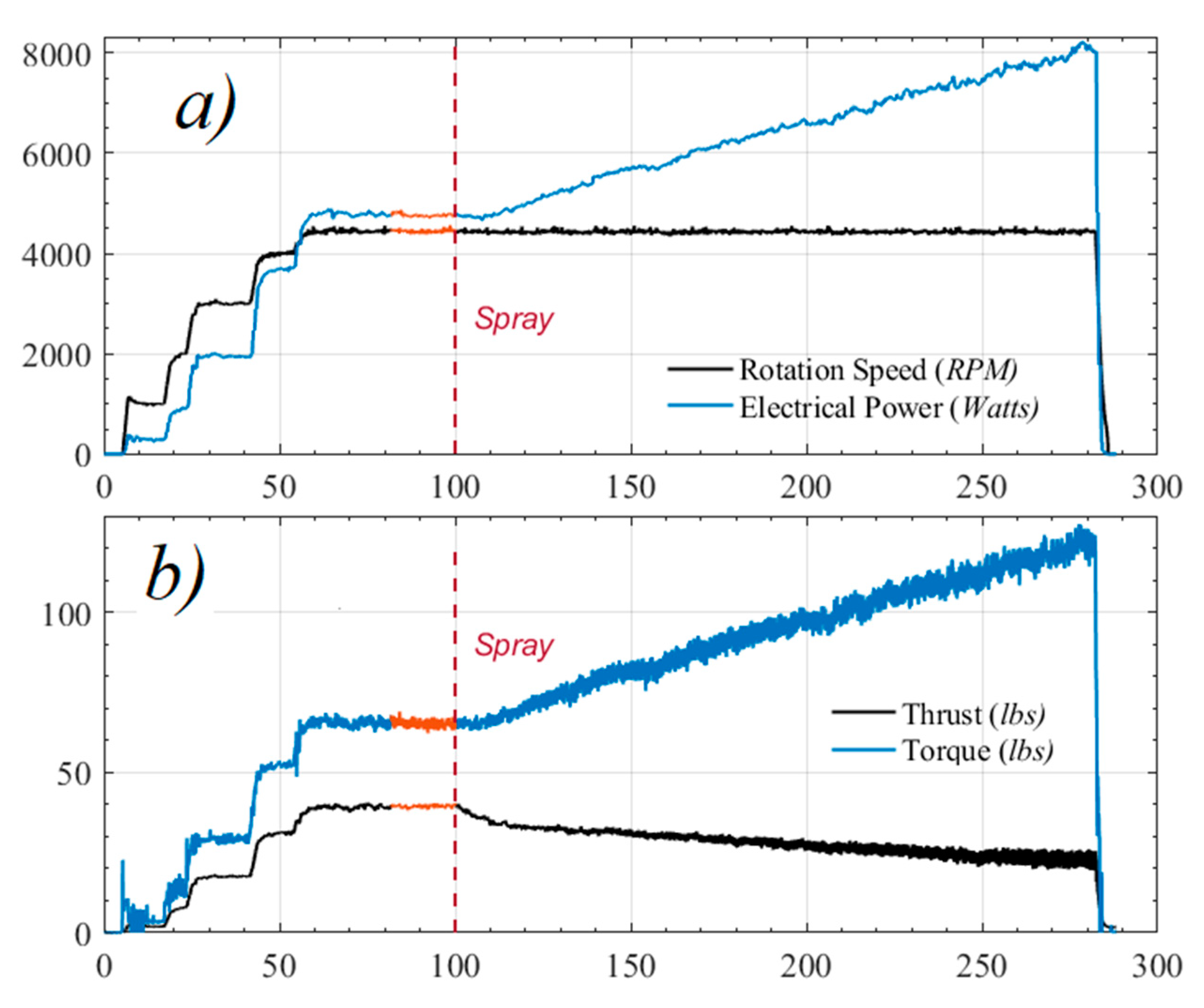
- The rotor speed is incrementally increased from 0 to the desired steady-state speed. After a short stabilization period at the target rotation speed, the water spray is activated, and ice accumulation begins where the torque and electrical power consumed continuously increase and thrust decreases. The vibration levels, motor temperature and electrical power consumed are closely monitored throughout the spray time.
- The test is stopped whenever one of those conditions happens; (listed in the order of actual occurrence during tests): 1- ice sheds from the blade, causing severe vibrations (>2 Inches Per Second (ips)) OR when the vibration levels reach 2 ips even without ice shedding; 2- the electrical power consumed approaches the rated power of the motor (12 kw); 3- the test duration exceeds 20 min and; 4- the motor temperature reaches 100 °C.
- After the test is concluded, the motor alimentation is switched off and the safety switch of the rotor is activated. A visual inspection of the equipment is first done to check for any damage.
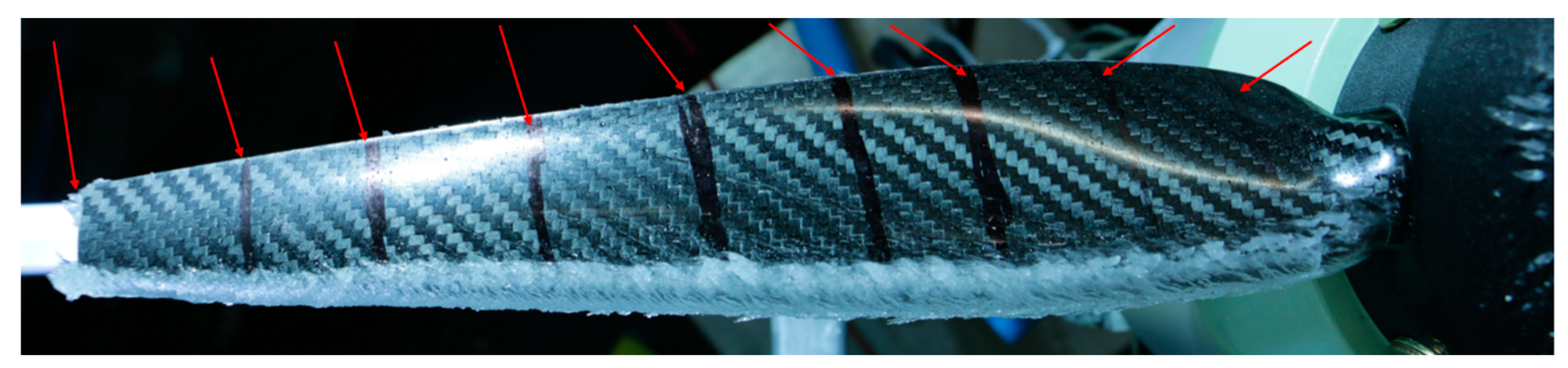
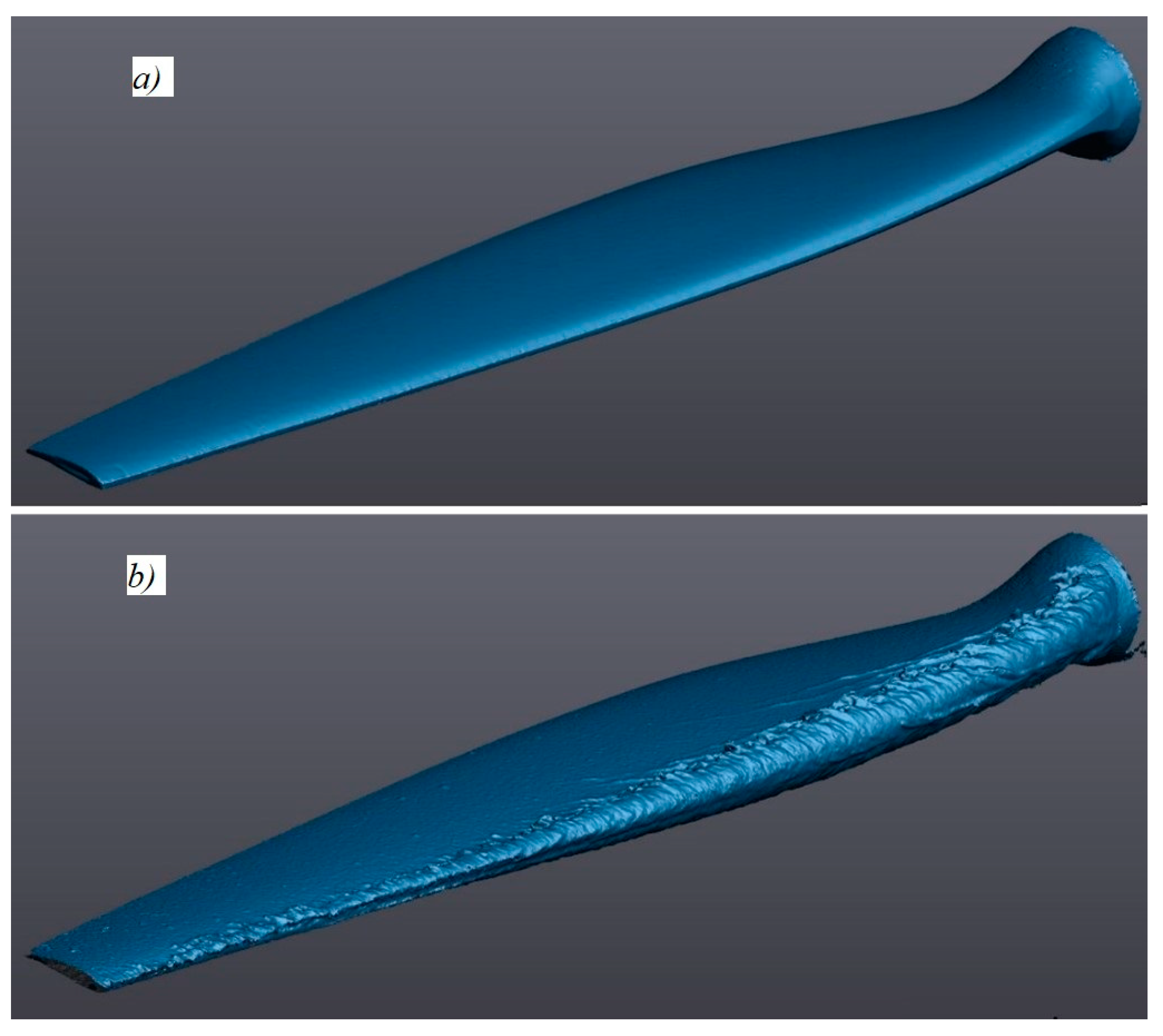
- The photography platform is then installed on the rotor pole, and photos of the ice shape are taken from the front, side and upper directions. A scan is performed of the ice accumulation with the 3D scanner and a digital caliper is then used to measure the ice thickness at 9 different and pre-marked blade locations.
- Finally, the ice is then melted off the rotor using a heat gun and cleaned using industrial grade paper towel to prepare it for the next test.
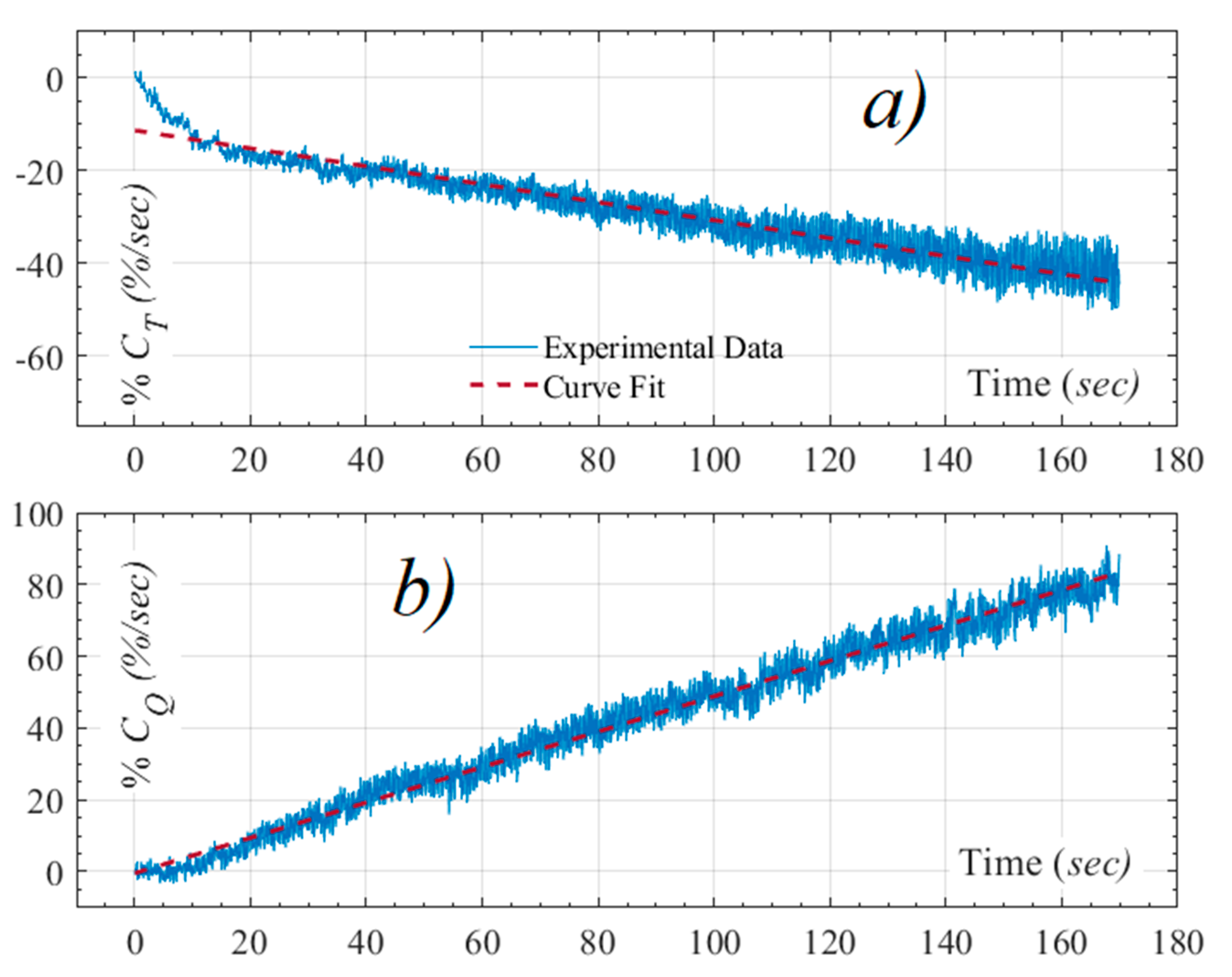
3.4. Post-Processing and Non-Dimensional Coefficients
4. Results
4.1. Validation of LWC Estimation—Droplet Terminal Velocity
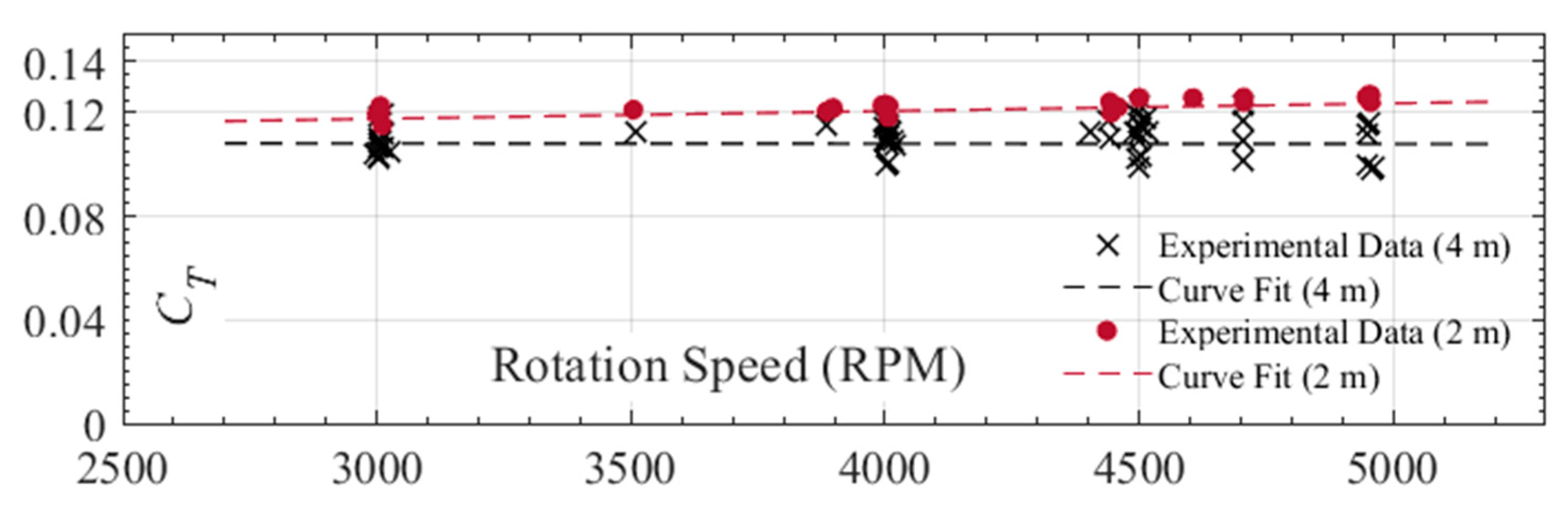
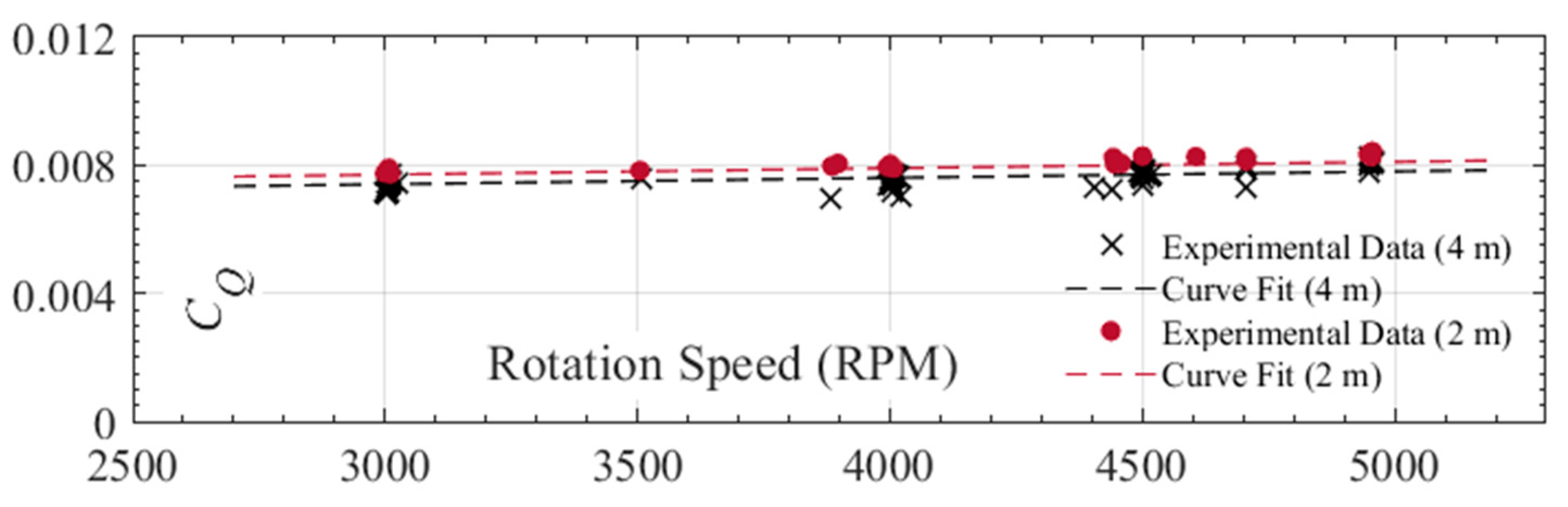
4.2. Assessment of Rotor Height on Ground Effect and Rotor Performance
4.3. Aerodynamic Parameters at Different Heights—Icing Tests
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Administration, F.A. UAS by the Numbers. 2021. Available online: https://www.faa.gov/uas/resources/by_the_numbers/ (accessed on 23 November 2021).
- Flight, B. BELL APT—Autonomous Pod Transport. 2021. Available online: https://www.bellflight.com/products/bell-apt (accessed on 26 November 2021).
- Cao, Y.; Tan, W.; Wu, Z. Aircraft icing: An ongoing threat to aviation safety. Aerosp. Sci. Technol. 2018, 75, 353–385. [Google Scholar] [CrossRef]
- Yamazaki, M.; Jemcov, A.; Sakaue, H. A Review on the Current Status of Icing Physics and Mitigation in Aviation. Aerospace 2021, 8, 188. [Google Scholar] [CrossRef]
- Liu, Y.; Li, L.; Ning, Z.; Tian, W.; Hu, H. Experimental Investigation on the Dynamic Icing Process over a Rotating Propeller Model. J. Propuls. Power 2018, 34, 933–946. [Google Scholar] [CrossRef] [Green Version]
- Potapczuk, M.G. Aircraft icing research at NASA Glenn research center. J. Aerosp. Eng. 2013, 26, 260–276. [Google Scholar] [CrossRef]
- Dukhan, N.; De Witt, K.J.; Masiulaniec, K.C.; Van Fossen, G.J. Experimental Frossling Numbers for Ice-Roughened NACA 0012 Airfoils. J. Aircr. 2003, 40, 1161–1167. [Google Scholar] [CrossRef]
- Fortin, G.; Laforte, J.-L.; Beisswenger, A. Prediction of ice shapes on NACA0012 2D airfoil. In Proceedings of the FAA In-Flight Icing/Ground De-Icing International Conference & Exhibition, 16–20 June 2003; SAE International United States: Warrendale, PA, USA, 2003. [Google Scholar]
- Özgen, S.; Canıbek, M. Ice accretion simulation on multi-element airfoils using extended Messinger model. J. Heat Mass Transf. 2009, 45, 305–322. [Google Scholar] [CrossRef]
- Tsao, J.-C.; Lee, S. Evaluation of Icing Scaling on Swept NACA 0012 Airfoil Models; NASA Glenn Research Center: Cleveland, OH, USA, 2012.
- Tsao, J.-C. Further Evaluation of Swept Wing Icing Scaling with Maximum Combined Cross Section Ice Shape Profiles. In Proceedings of the 2018 Atmospheric and Space Environments Conference, Atlanta, GA, USA, 25–29 June 2018; American Institute of Aeronautics and Astronautics: Atlanta, GA, USA, 2018; p. 3183. [Google Scholar]
- Liu, Y.; Zhang, K.; Tian, W.; Hu, H. An experimental investigation on the dynamic ice accretion and unsteady heat transfer over an airfoil surface with embedded initial ice roughness. Int. J. Heat Mass Transf. 2020, 146, 118900. [Google Scholar] [CrossRef]
- Tsao, J.-C.; Kreeger, R. Further Evaluation of Scaling Methods for Rotorcraft Icing; SAE Technical Paper; SAE: Warrendale, PA, USA, 2011. [Google Scholar]
- Palacios, J.L.; Han, Y.; Brouwers, E.W.; Smith, E.C. Icing Environment Rotor Test Stand Liquid Water Content Measurement Procedures and Ice Shape Correlation. J. Am. Helicopter Soc. 2012, 57, 29–40. [Google Scholar] [CrossRef]
- Wright, J.; Aubert, R. Icing wind tunnel test of a full scale heated tail rotor model. In Proceedings of the AHS 70th Annual Forum, Montreal, QC, Canada, 20–22 May 2014; American Helicopter Society (AHS): Montreal, QC, Canada, 2014; pp. 20–22. [Google Scholar]
- Li, Y.; Sun, C.; Jiang, Y.; Feng, F. Scaling Method of the Rotating Blade of a Wind Turbine for a Rime Ice Wind Tunnel Test. Energies 2019, 12, 627. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Zhu, C.; Zhao, N. Experimental Study on the Effect of Different Parameters on Rotor Blade Icing in a Cold Chamber. Appl. Sci. 2020, 10, 5884. [Google Scholar] [CrossRef]
- Fortin, G.; Perron, J. Spinning rotor blade tests in icing wind tunnel. In Proceedings of the 1st AIAA Atmospheric and Space Environments Conference, San Antonio, TX, USA, 22–25 June 2009; American Institute Aeronautics and Astronautics: San Antonio, TX, USA, 2009; p. 4260. [Google Scholar]
- Narducci, R.; Kreeger, R.E. Analysis of a Hovering Rotor in Icing Conditions; NASA: Phoenix, AZ, USA, 2012.
- Narducci, R.; Kreeger, R.E. Application of a High-Fidelity Icing Analysis Method to a Model-Scale Rotor in Forward Flight; NASA: Virginia Beach, VA, USA, 2012.
- Chen, L.; Zhang, Y.; Wu, Q.; Chen, Z.; Peng, Y. Numerical Simulation and Optimization Analysis of Anti-/De-Icing Component of Helicopter Rotor Based on Big Data Analytics. In Theory, Methodology, Tools and Applications for Modeling and Simulation of Complex Systems, Proceedings of the AsiaSim 2016, SCS AutumnSim 2016, Beijing, China, 8–11 October 2016; Springer: Singapore, 2016; pp. 585–601. [Google Scholar]
- Xi, C.; Qi-Jun, Z. Numerical Simulations for Ice Accretion on Rotors Using New Three-Dimensional Icing Model. J. Aircr. 2017, 54, 1428–1442. [Google Scholar] [CrossRef]
- Villeneuve, E.; Harvey, D.; Zimcik, D.; Aubert, R.; Perron, J. Piezoelectric Deicing System for Rotorcraft. J. Am. Helicopter Soc. 2015, 60, 1–12. [Google Scholar] [CrossRef]
- Liu, Y.; Li, L.; Hu, H. An Experimental Study on the Effects of Surface Wettability on the Ice Accretion over a Rotating UAS Propeller. In Proceedings of the 9th AIAA Atmospheric and Space Environments Conference, AIAA, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Canada, T. Transport Canada’s Drone Strategy to 2025; Transport Canada: Ottawa, ON, Canada, 2021. [Google Scholar]
- Liu, Y.; Li, L.; Li, H.; Hu, H. An experimental study of surface wettability effects on dynamic ice accretion process over an UAS propeller model. Aerosp. Sci. Technol. 2018, 73, 164–172. [Google Scholar] [CrossRef]
- Brouwers, E.W.; Palacios, J.L.; Smith, E.C.; Peterson, A.A. The experimental investigation of a rotor hover icing model with shedding. In Proceedings of the American Helicopter Society 66th Annual Forum, Phoenix, AZ, USA, 11–13 May 2010. [Google Scholar]
- Samad, A.; Villeneuve, E.; Blackburn, C.; Morency, F.; Volat, C. An Experimental Investigation of the Convective Heat Transfer on a Small Helicopter Rotor with Anti-Icing and De-Icing Test Setups. Aerospace 2021, 8, 96. [Google Scholar] [CrossRef]
- Samad, A.; Villeneuve, E.; Morency, F.; Volat, C. A Numerical and Experimental Investigation of the Convective Heat Transfer on a Small Helicopter Rotor Test Setup. Aerospace 2021, 8, 53. [Google Scholar] [CrossRef]
- Villeneuve, E.; Volat, C.; Ghinet, S. Numerical and Experimental Investigation of the Design of a Piezoelectric De-Icing System for Small Rotorcraft Part 1/3: Development of a Flat Plate Numerical Model with Experimental Validation. Aerospace 2020, 7, 62. [Google Scholar] [CrossRef]
- Villeneuve, E.; Blackburn, C.; Volat, C. Design and Development of an Experimental Setup of Electrically Powered Spinning Rotor Blades in Icing Wind Tunnel and Preliminary Testing with Surface Coatings as Hybrid Protection Solution. Aerospace 2021, 8, 98. [Google Scholar] [CrossRef]
- Villeneuve, E.; Ghinet, S.; Volat, C. Experimental Study of a Piezoelectric De-Icing System Implemented to Rotorcraft Blades. Appl. Sci. 2021, 11, 9869. [Google Scholar] [CrossRef]
- SAE. Droplet Sizing Instrumentation Used in Icing Facilities—Aerospace Standard AIR4906; AC-9C Aircraft Icing Technology Committee: Warrendale, PA, USA, 1995. [Google Scholar]
- SAE. Endurance Time Tests for Aircraft Deicing/Anti-Icing Fluids SAE Type II, III, and IV—Aerospace Standard ARP5485; G-12HOT Holdover Time Committee: Warrendale, PA, USA, 2004. [Google Scholar]
- SAE. Endurance Time Tests for Aircraft Deicing/Anti-icing Fluids SAE Type I—Aerospace Standard ARP5945; G-12HOT Holdover Time Committee: Warrendale, PA, USA, 2007. [Google Scholar]
- Orchard, D. Investigation of tolerance for icing of UAV rotors/propellers: Phase 3 test results. In Laboratory Memorandum (National Research Council of Canada. Aerospace. Aerodynamics Laboratory); no. LM-AL-2021-0051; National Research Council of Canada. Aerospace: Ottawa, ON, Canada, 2021. [Google Scholar]
- SAE. Calibration and Acceptance of Icing Wind Tunnels—Aerospace Standard ARP5905; AC-9C Aircraft Icing Technology Committee: Warrendale, PA, USA, 2003. [Google Scholar]
- Jeck, R.K. FAA/AR-09/45: Models And Characteristics of Freezing Rain And Freezing Drizzle For Aircraft Icing Applications; Federal Aviation Administration, Department of Transportation: Springfield, VA, USA, 2010.
- Advisory Circular 29-2C, C.o.T.C.R. 29-2C, Certification of Transport Category Rotorcraft; Federal Aviation Administration, Department of Transportation: Washington, DC, USA, 2008.
- SAE. Water Spray and High Humidity Endurance Test Methods for AMS1424 and AMS1428 Aircraft Deicing/Anti-Icing Fluids—Aerospace Standard ARP5901; G-12ADF Aircraft Deicing Fluids: Warrendale, PA, USA, 2019. [Google Scholar]
- Timmerman, P.; Van Der Weele, J.P. On the rise and fall of a ball with linear or quadratic drag. Am. J. Phys. 1999, 67, 538–546. [Google Scholar] [CrossRef] [Green Version]
- Johnson, W. Rotorcraft Aeromechanics; Cambridge University Press: Cambridge, UK, 2013; Volume 36. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| λ (g dm−2 h−1) | MVD (μm) | LWC (g/m3) | Rational |
|---|---|---|---|
| 5 | 120 | 0.47 | 0.5 g/m3 (FAA/AR-09/45) |
| 25 | 120 | 2.35 | Typical Ground Icing + Light Rain (2 L/h/m2) |
| 25 | 800 | 0.19 | Typical Ground Icing + Light Rain (2 L/h/m2) |
| 67 | 120 | 6.31 | 0.25 in. Water/hr for APT70 Requirement + Moderate Rain (6 L/h/m2) |
| 67 | 800 | 0.50 | 0.25 in. Water/hr for APT70 Requirement + 0.5 g/m3 (FAA/AR-09/45) + Moderate Rain (6 L/h/m2) |
| 80 | 120 | 7.53 | Typical Ground Icing + Moderate Rain (8 L/h/m2) |
| 80 | 800 | 0.59 | Typical Ground Icing + Moderate Rain (8 L/h/m2) |
| Thrust Level | Scaling Rule | RPM |
|---|---|---|
| Low | Same centrifugal force | 3880 |
| Same tip-speed | 4300 | |
| Medium | Same centrifugal force | 4440 |
| Same tip-speed | 4950 | |
| High | Same centrifugal force | 4950 |
| Same tip-speed | 5540 |
| Height (m) | Ω; Icing Tests (RPM) |
|---|---|
| 2 | 3880 |
| 4400 | |
| 4 | 4950 |
| 4950 |
| MVD (µm) | T∞ (°C) | Height (m) | (%/s) | (%/s) | (%/s) | P+ (%/s) | Icing Time (s) |
|---|---|---|---|---|---|---|---|
| 120 | −5 | 2 | −0.124 | 0.430 | 0.491 | 0.524 | 169 |
| 4 | −0.195 | 0.565 | 0.703 | 0.785 | 114 | ||
| Ratio | 1.57 | 1.31 | 1.43 | 1.50 | 0.67 | ||
| −15 | 2 | −0.136 | 0.317 | 0.367 | 0.394 | 162 | |
| 4 | −0.226 | 0.400 | 0.548 | 0.642 | 106 | ||
| Ratio | 1.66 | 1.27 | 1.50 | 1.62 | 0.65 | ||
| 800 | −5 | 2 | −0.036 | 0.061 | 0.063 | 0.065 | 321 |
| 4 | −0.012 | 0.047 | 0.048 | 0.048 | 761 | ||
| Ratio | 0.33 | 0.78 | 0.76 | 0.75 | 2.37 | ||
| −15 | 2 | −0.049 | 0.081 | 0.085 | 0.087 | 326 | |
| 4 | −0.081 | 0.121 | 0.132 | 0.138 | 220 | ||
| Ratio | 1.65 | 1.49 | 1.55 | 1.58 | 0.67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villeneuve, E.; Samad, A.; Volat, C.; Béland, M.; Lapalme, M. An Experimental Apparatus for Icing Tests of Low Altitude Hovering Drones. Drones 2022, 6, 68. https://doi.org/10.3390/drones6030068
Villeneuve E, Samad A, Volat C, Béland M, Lapalme M. An Experimental Apparatus for Icing Tests of Low Altitude Hovering Drones. Drones. 2022; 6(3):68. https://doi.org/10.3390/drones6030068
Chicago/Turabian StyleVilleneuve, Eric, Abdallah Samad, Christophe Volat, Mathieu Béland, and Maxime Lapalme. 2022. "An Experimental Apparatus for Icing Tests of Low Altitude Hovering Drones" Drones 6, no. 3: 68. https://doi.org/10.3390/drones6030068
APA StyleVilleneuve, E., Samad, A., Volat, C., Béland, M., & Lapalme, M. (2022). An Experimental Apparatus for Icing Tests of Low Altitude Hovering Drones. Drones, 6(3), 68. https://doi.org/10.3390/drones6030068