
Medical Drone Managing System for Automated External Defibrillator Delivery Service

 ,
,  and
and
Abstract
:1. Introduction
- (1)
- We developed drone managing software for an AED delivery drone that can be remotely controlled to take off from the ground station and go to the patient, and then return from the patient to the ground station, operated by a drone administrator a few kilometers away. A waypoint between the patient who calls the drone and the drone station is computed and uploaded to the drone for automated cruising.
- (2)
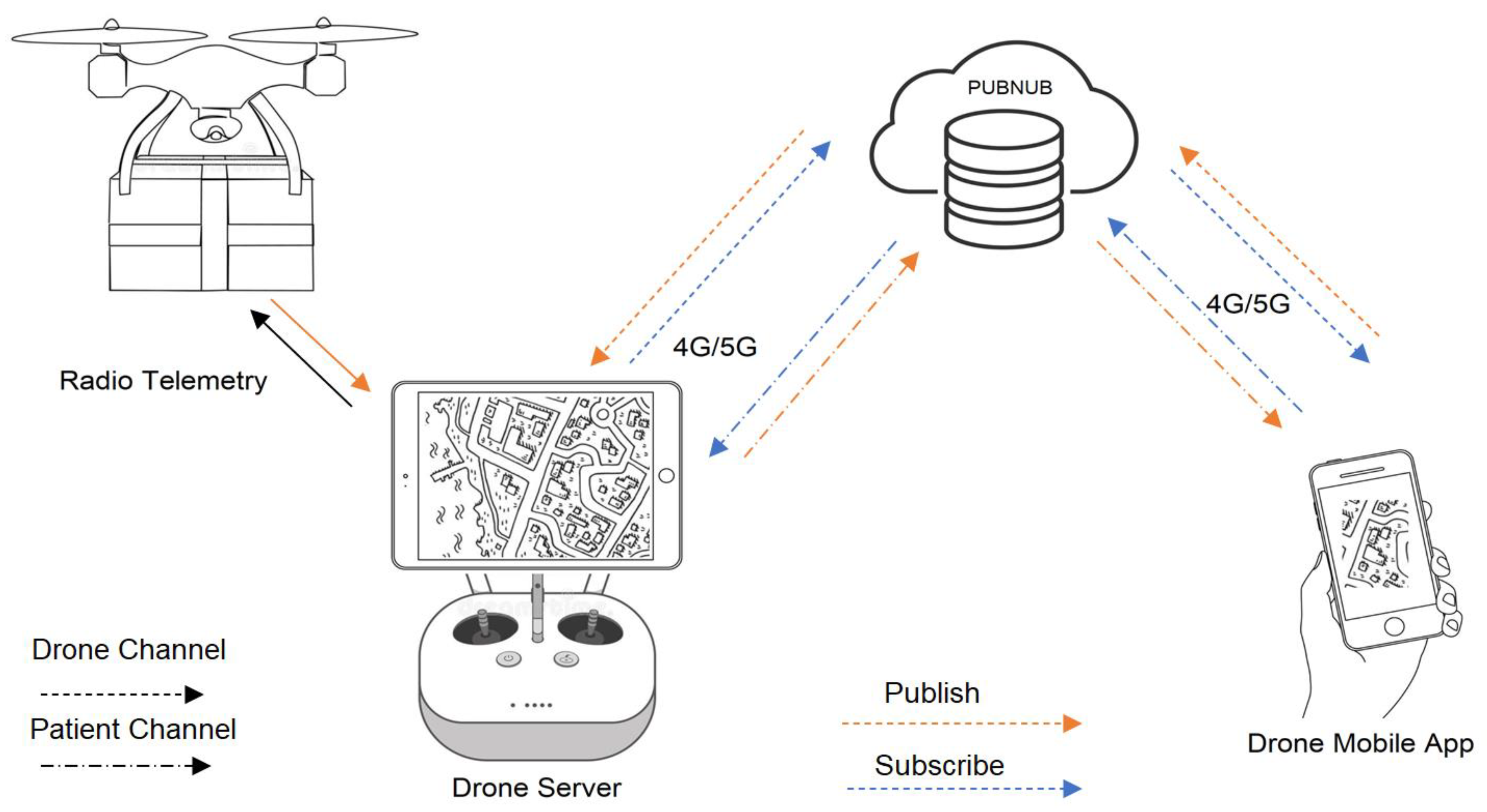
- We exploited the real-time application of the PubNub cloud service to exchange information between the patient and the drone. The application enables the patient to request an AED drone from 5 km away.
- (3)
- An Android mobile application was developed and installed on the patient’s mobile phone. The patient can call the drone in case of an emergency by a single click. The notification is then sent to the drone administrator to launch the drone from the ground station. The drone’s geological location is updated and displayed on the mobile application in real time to estimate the arrival time.
- (4)
- A drone server application was developed to send the drone manually to any location by clicking the location on Google Maps. When combined with the patient’s Android mobile application, this provides a medical drone managing system that can be applied to various medical service including delivering prescription drugs, assisting in road accidents, and delivering first aid kits. The system is especially useful for rehabilitation centers.
- (5)
- Our drone dispatching service aims to reduce the delay time between the onset of cardiac arrest and when the notification is received by the dispatcher. At the onset of cardiac arrest, the patient can instantly send a notification and their location to the drone pilot.
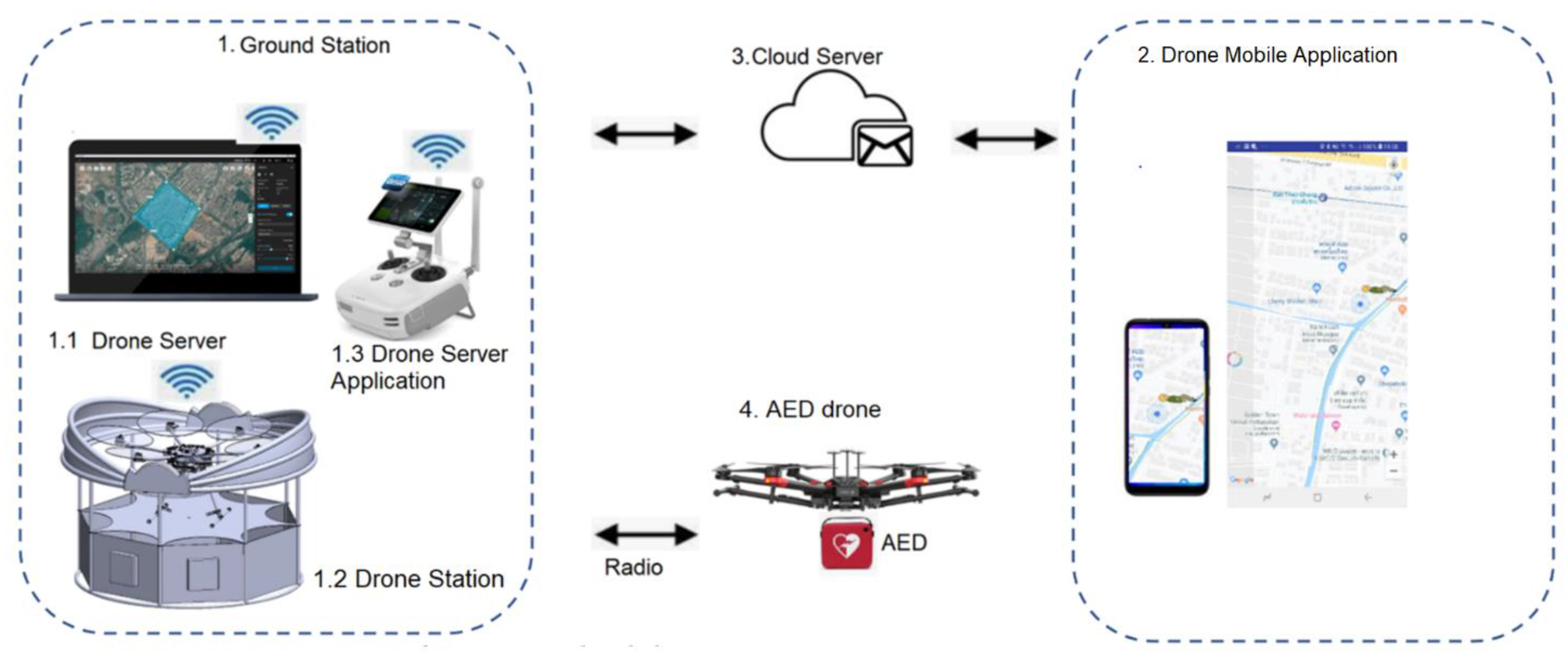
2. Materials and Methods
2.1. PubNub Cloud Server
2.2. Drone Ground Station
2.2.1. Drone Server
2.2.2. Drone Station
2.2.3. Drone Server Application
2.3. Drone Mobile Application
3. Results
3.1. Operational Test on Flight Simulator
| (i) | Connect the drone to the PC with installed flight simulator software via the USB port. Turn on the drone and software to establish a connection. Set the drone location in the flight simulator to be some distance away from the current location |
| (ii) | Connect the drone server (tablet installed with Waypoint and the UX SDK) with the drone remote control. Turn on the remote control to establish a connection. |
| (iii) | Run the drone mobile application and call the drone to the current location. The icon of the drone station, drone, and patient will appear in the drone server application, as shown in Figure 9a. |
| (iv) | On the drone server, click the “upload”, “config”, and “start” buttons to launch the drone to the destination. Observe the drone icon moving toward the patient, as shown in Figure 9b–d. Observe this also on the drone mobile application. |
| (v) | Observe the drone take off and land at the destination on the flight simulator. |
| (vi) | Activate the home maneuver by clicking the “home” button on the drone server. The drone will take off at the destination location and land at the drone station. |
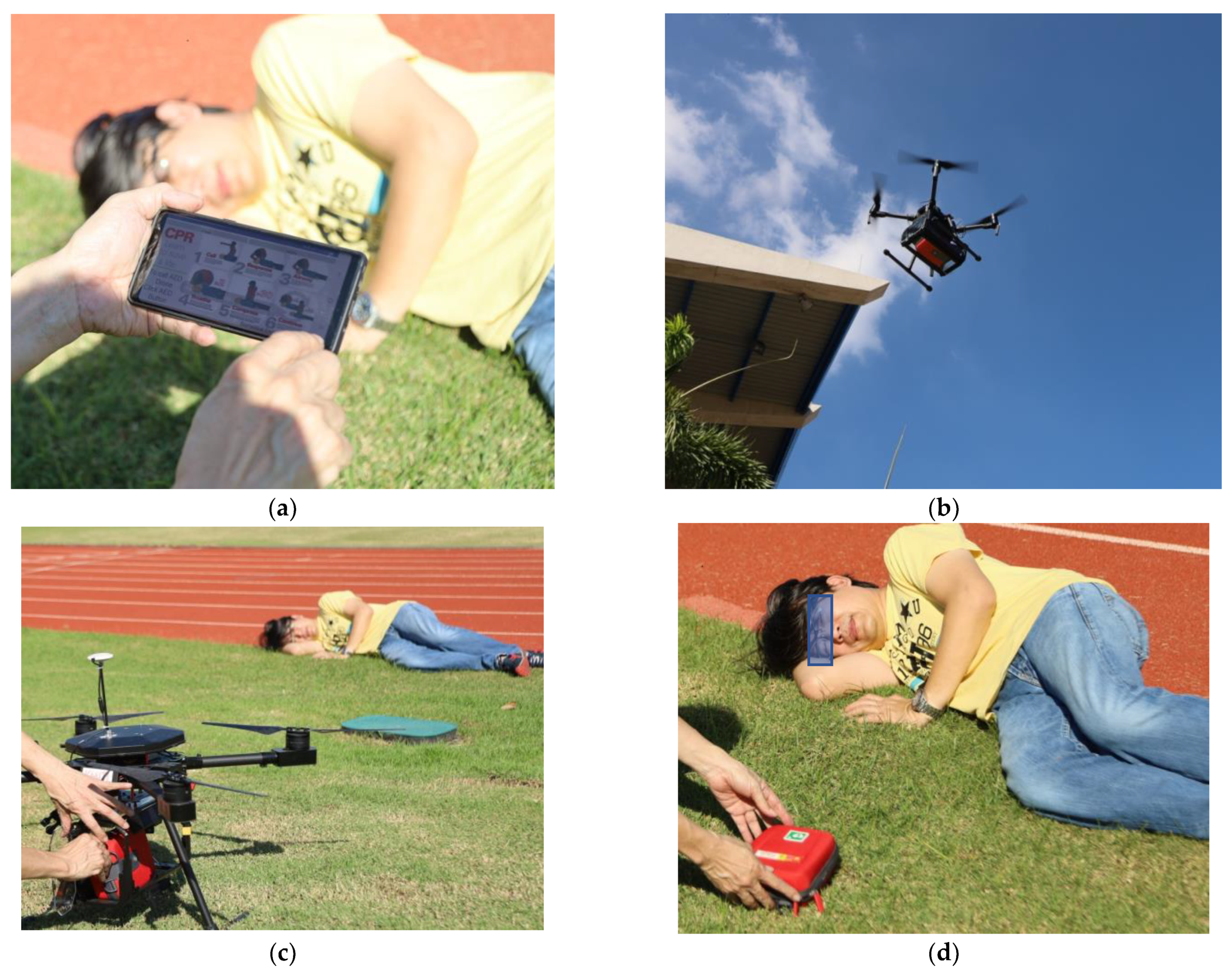
3.2. Field Flight Test
4. Discussion
| (i) | The flying zone of the AED drone depends on the radio telemetry strength of the remote control. The flying zone covers the radius of 5 km from the drone station. The system is hence suitable for medium-sized rehabilitation centers or golf resorts that mostly serve the elderly who are prone to heart disease. |
| (ii) | One of the missing features of our medical drone managing system for automated external defibrillator delivery is obstacle avoidance. The medical drone managing system is hence not suitable to be operated in a city, where many obstacles can be found, including electrical wires and tall buildings. To be used in a city, an obstacle avoidance feature should be added. |
| (iii) | Audio data should also be communicated between the patient and drone station. The available audio data can be used to advise the accompanying person and the nearby people to assist the patient in the case of an emergency. The audio data communication will be explored in future work. |
| (iv) | The cost of construction of this drone managing system is around USD 3500. The cost for personnel needed in the operation is USD 80,000 per year. Drone annual liability insurance is 200 USD/year. The total cost of the medical drone managing system is approximately USD 83,700 per year. |
| (v) | The system is recommended to be used at elderly resort facilities, university campuses, or golf court complexes. The nearest medical stations and their locations can be registered in the system. The distance between the nearest medical station and the patient can then be computed. When the AED drone emergency service is called, the system can send a notification to the AED drone station and also a medical station (hospital). The AED drone station will dispatch AED while the medical station (hospital) will dispatch emergency service personnel. |
| (vi) | To operate the proposed medical drone managing system, the following safety measure is needed to ensure the safety of both the operator and patient [25]: the drone operator must be well-trained, certified, and registered with the National Broadcasting and Telecommunication Commission. The drone operator must buy accidental insurance covering the costs that might be incurred by the injury or death of a third person caused by the drone’s operation. The annual cost of insurance is 200 USD/year with total liabilities of USD 31,250 (1,000,000 Thai Baht), which include the loss of life or bodily injury of the third party. The drone managing system can be operated only in drone flying-allowed zones designated by the National Broadcasting and Telecommunication Commission. The drone should be equipped with an obstacle avoidance feature and anti-collision beacon lights, especially for autonomous flying, to prevent any hazardous event. A drone propeller guard must be used to prevent any injury, especially when the drone flies near living humans or animals. The designed drone weight should not exceed 24 lbs. The maximum altitude of flying the drone is limited to 400 feet above the ground. |
| (vii) | The AED drone managing system was designed to operate both in rural and urban areas. When used in a rural area, drone delivery can perform efficiently and smoothly, with fewer building obstacles. For urban areas, however, there are a lot of tall buildings that can obscure the drone flight mission. Our system will set the flight altitude at 30 m. When the AED drone is called, it will fly vertically to the set altitude and then fly to the patient location. This is to avoid tall buildings. Nevertheless, a drone operated in an urban area should be equipped with an obstacle sensing system with a sensing range between 1 and 30 m and the drone speed should be reduced to as low as 20 km/h from the maximum speed of 60 km/h. The communication between the drone and the drone remote control uses microwaves with a broadcasting frequency of 5.725–5.850 GHz and a max. transmitting distance of 8 km. The AED drone managing system is recommended to operate in an area with a radius of 5 km from the drone station. A weak telemetry signal will alarm in case the drone flies outside the operating zone. With the current technology of 4G and 5G mobile phone systems, it can be ensured that all of the areas can have a 4G/5G signal to operate the drone mobile application. |
| (viii) | The source code for both the Waypoint/UX application and the mobile application in this research are available at [26]. |
| (xi) | The test flight of this research was conducted by a drone administrator who has been granted a certification of registration for radio communication in unmanned arial vehicles (UAVs) from the National Broadcasting and Telecommunications Commission of Thailand with a valid license ID since March 2020. The propose of the use of the aircraft under the granted certificate is to conduct aircraft research and development for academic/commercial use. |
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Corona Diseases in Thailand. Available online: https://www.worldlifeexpectancy.com/thailand-coronary-heart-disease (accessed on 31 October 2021).
- Heart Stoke Foundation. Available online: https://www.heartandstroke.ca/-/media/pdf-files/canada/other/pad-eng-final.ashx (accessed on 30 November 2021).
- Fredman, D.; Haas, J.; Ban, Y.; Jonsson, M.; Svensson, L.; Djarv, T.; Hollenberg, J.; Nordberg, P.; Ringh, M.; Claesson, A. Use of a geographic information system to identify differences in automated external defibrillator installation in urban areas with similar incidence of public out-of-hospital cardiac arrest: A retrospective registry-based study. BMJ Open 2017, 7, e014801. [Google Scholar] [CrossRef] [PubMed]
- Ashok, K.R.; Arulselvan, P.; Ashif, A.; Gokul, S.; Kuppusamy, R. Aero Ambulance Quad copter Based Tech-nology for An Emergency Healthcare. In Proceedings of the 2019 5th International Conference on Advanced Computing & Communication Systems (ICACCS), Coimbatore, India, 15–16 March 2019; pp. 1197–1200. [Google Scholar] [CrossRef]
- Abeygunawaradana, P.; Gamage, N.; De Alwis, L.; Ashan, S.; Nilanka, C.; Godamune, P. E-Medic—Autonomous Drone for Healthcare System. In Proceedings of the 2021 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 19–20 February 2021; pp. 994–999. [Google Scholar] [CrossRef]
- Bravo, G.C.; Parra, D.M.; Mendes, L.; de Jesus Pereira, A.M. First aid drone for outdoor sports activities. In Proceedings of the 2016 1st International Conference on Technology and Innovation in Sports, Health and Wellbeing (TISHW), Vila Real, Portugal, 1–3 December 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Maheswari, R.; Ganesan, R.R.; Venusamy, K. MeDrone- A Smart Drone to Distribute Drugs to Avoid Human Intervention and Social Distancing to Defeat COVID-19 Pandemic for Indian Hospital. J. Phys. Conf. Ser. 2021, 1964, 062112. [Google Scholar] [CrossRef]
- Mangtani, L.M.; Khanorkar, A.K.; Titarmare, S.N.; Badhane, R.S.; Baghele, S.D.; Pandele, R.M.; Baig, M.M. Implement Emergency Medical Facility Through Unmanned Aerial Vehical. In Proceedings of the 2019 Third International conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud) (I-SMAC), Palladam, India, 12–14 December 2019; pp. 352–356. [Google Scholar] [CrossRef]
- Claesson, A.; Bäckman, A.; Ringh, M.; Svensson, L.; Nordberg, P.; Djärv, T.; Hollenberg, J. Time to Delivery of an Automated External Defibrillator Using a Drone for Simulated Out-of-Hospital Cardiac Arrests vs Emergency Medical Services. JAMA 2017, 317, 2332–2334. [Google Scholar] [CrossRef] [PubMed]
- Designindaba. Available online: https://www.designindaba.com/articles/creative-work/student-invents-ambulance-drone-speedy-medical-assistance (accessed on 30 November 2021).
- Flynow. Available online: https://flytnow.com/ (accessed on 25 December 2021).
- Gupta, A. A Software Solution for Medical Drone Delivery, Linkedin. 2020. Available online: https://www.linkedin.com/pulse/software-solution-medical-drone-delivery-amartya-gupta (accessed on 25 December 2021).
- Flyzip. Available online: https://www.flytzip.com (accessed on 25 December 2021).
- PubNub. Available online: https://www.pubnub.com/ (accessed on 30 November 2021).
- DJI Developer. Available online: https://developer.dji.com/mobile-sdk/ (accessed on 31 October 2021).
- Real-Time In-App Chat and Communication Platform. Available online: https://www.pubnub.com/ (accessed on 31 October 2021).
- DJI Developer. Available online: https://developer.dji.com/document/463b742f-8d77-452f-af42-2b7e60914806 (accessed on 31 October 2021).
- DJI Developer. Available online: https://developer.dji.com/document/a9afdead-ed4f-4946-9cc6-641e04bad966 (accessed on 31 October 2021).
- Location Manager. Available online: https://stuff.mit.edu/afs/sipb/project/android/docs/training/basics/location/locationmanager.html (accessed on 31 October 2021).
- PubNub Android. Available online: https://www.pubnub.com/docs/sdks/java/android (accessed on 31 October 2021).
- Flight Controller DJI. Available online: https://developer.dji.com/mobile-sdk/documentation/introduction/component-guide-flightController.html (accessed on 31 October 2021).
- Waypoin Application. Available online: https://developer.dji.com/mobile-sdk/documentation/android-tutorials/GSDemo-Google-Map.html (accessed on 31 October 2021).
- Android Developer. Available online: https://developer.android.com/ (accessed on 31 October 2021).
- Best Flight Simulator. Available online: https://www.droneblog.com/drone-flight-simulator/ (accessed on 31 October 2021).
- Drone in Public Safety. Available online: https://www.faa.gov/uas/public_safety_gov/media/Law_Enforcement_Drone_Programs_Brochure.pdf (accessed on 30 November 2021).
- Drone AED Source Code. Available online: https://drive.google.com/drive/folders/1xX--OML8iMk87p1PDm24DmjP13XlPDmO?usp=sharing (accessed on 4 March 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drone | Max. Flight Time | Elapsed Time | Application | Max. Distance | Software | Flight Mode | Payload | Drone Weight | Application |
|---|---|---|---|---|---|---|---|---|---|
| Our drone | 24 min | 1 min/km | AED drone delivery | 5 km | In-house | GPS | 800 g | 5.00 kg | √Android |
| MeDrone [7] | 24 min | NA | Drug delivery | NA | In-house | GPS | 500 g | 2.75 kg. | √ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Purahong, B.; Anuwongpinit, T.; Juhong, A.; Kanjanasurat, I.; Pintaviooj, C. Medical Drone Managing System for Automated External Defibrillator Delivery Service. Drones 2022, 6, 93. https://doi.org/10.3390/drones6040093
Purahong B, Anuwongpinit T, Juhong A, Kanjanasurat I, Pintaviooj C. Medical Drone Managing System for Automated External Defibrillator Delivery Service. Drones. 2022; 6(4):93. https://doi.org/10.3390/drones6040093
Chicago/Turabian StylePurahong, Boonchana, Thanavit Anuwongpinit, Aniwat Juhong, Isoon Kanjanasurat, and Chuchart Pintaviooj. 2022. "Medical Drone Managing System for Automated External Defibrillator Delivery Service" Drones 6, no. 4: 93. https://doi.org/10.3390/drones6040093
APA StylePurahong, B., Anuwongpinit, T., Juhong, A., Kanjanasurat, I., & Pintaviooj, C. (2022). Medical Drone Managing System for Automated External Defibrillator Delivery Service. Drones, 6(4), 93. https://doi.org/10.3390/drones6040093