On-demand air transport is an air-taxi service concept that should use small, Vertical Short Takeoff and Landing (VSTOL), battery-powered, electric aircraft (eVTOL). These aircraft should be competitive with modern helicopters, which are exceptionally reliable and cost-effective aerial vehicles designed for the same task. These new vehicles should be more efficient, less expensive, eco-friendly, and quieter than helicopters and autogiros. A few considerations are necessary before the introduction of an innovative design concept for the task. First, autonomous flying is possible [
1] and relatively straightforward, with the aid of today’s machine learning technologies [
2,
3,
4]. Most commercial airplanes have the capability of fully autonomous flight from takeoff to landing [
4]. Many Unmanned Aerial Vehicles (UAVs) have the capability to fly a mission autonomously even in controlled airspace and in airports. Nevertheless, unmanned flight is rarely considered for civil air transportation [
5]. This is because most passengers would refuse to use a pilotless airplane. Therefore, from the perspective of an individual who communicates with their destination via an app, the notion of securing their seatbelt, closing the door, and taking off for a fully autonomous flight is physiologically uncomfortable. What would happen in case of an emergency? The air-taxi would be controlled by an emergency ground station. How would the control authority expect such an aircraft to fly over a crowded city, with other aerial vehicles? For this reason, it is important to design an optionally piloted vehicle. In this case, at least for an initial period, a pilot could transport the passengers to their destination. Theoretically, electric propulsion introduces the potential to alter the design of vertical lift vehicles for reduced cost. Experts theorize a substantive operating cost improvement because of lower energy costs, reduced maintenance time, mass production, and increased part commonality [
6]. In fact, energy coming from the electrical grid costs less than one third of that obtained on-board from aviation fuel. Only for this reason, a 6% reduction comes directly from the 20% share of fuel in terms of the operating costs for helicopters. Electrical propulsion is also expected to reduce maintenance by 20–30% due to the elimination of gearing and transmission. Unfortunately, battery-specific energy is a critical constraint for all electric aircraft, since the vehicle gross weight increases rapidly as the specific energy is reduced. The new concept proposed in most papers relies on batteries that do not exist. To certify an aerial vehicle, one must use a certified battery pack, with cells that are produced to a sufficient quality level. Today, this quality level is one failure over 200 million cells for the whole battery life. Today, batteries need a Battery Management Unit (BMU) with a reliability of more than one minor failure over 30,000 flying hours [
7]. The BMU should equalize the charge of all the cells. In 2023, the required number of cells will be equal to 3000 for a 100 kWh battery. The BMU should also check the cells. It will discharge all the units that are damaged or significantly aged, beyond recovery. The BMU also controls the charging and discharging current, which depends on the battery temperature, cell age, and the type of charge (fast or best). The BMU should also contain safe braking systems for misuse or crash. Today, a thermal and mechanical barrier is required to protect the aircraft from thermal runaway of the cells and piercing of the unit in case of crash. In addition, the efficiency of battery charging and discharging depends on several factors. Current, temperature, and age are the most important [
8]. It is important to note that the second law of thermodynamics states that as energy is transferred or transformed, a part of it is wasted; therefore, battery charging and discharging never have unitary efficiency. For these reasons, the battery should be cooled or heated [
9]. Today, it is appropriate to design a vehicle that uses aircraft-certified eAPUs, with the possibility to update the vehicle to retrofit the future battery later as it becomes available. In fact, in a few studies found in the literature, the eVTOL aircraft was designed with a futuristic 300–400 W hr/kg battery [
10,
11]. Air transportation safety requires the use of already tested power packs, and costs require the use of mass-produced batteries. Therefore, the easiest way to obtain the real, commercially available power density is to adopt existing power packs that are widely used in the automotive market for electrical vehicles (EVs).
Table 1 shows acceptable ranges for Volumetric Energy Density (VED) (Wh/dm3) and Specific Energy Density (SED) (Wh/kg).
The Tesla car manufacturer has successfully applied a 4416-cylinder-cell-unit that weighs 478 kg and stores 75 kWh to Model 3. This means an SED of 157 Wh/kg. This power pack is approximately 1200 mm wide, 1900 mm long, and 100 mm thick for a VED of 328 Wh/dm
3. The modules are cooled with a fan-equipped radiator. A liquid-cooled electronic system controls the battery temperature and outputs the DC current at the nominal voltage of 400 V. The complete “PowerWall 2” power pack, also from Tesla, has an SED of 106 Wh/dm
3 and a VED of 118 Wh/kg. Nonetheless, actual technology is far from the level of 400 Wh/m
3 assumed by a few authors [
10,
11]. In addition, fast discharge during vertical takeoff and landing will face lower efficiency with loss of energy. “Fast charge” cycles of 40 or 60 min each would also significantly reduce battery life. For this reason, now, it is necessary to consider the possibility of changing the battery pack instead of recharging it. Many companies are working on eVTOL designs, including Airbus, Boeing, Honeywell, Joby Aviation, Terrafugia, Lilium Aviation, and Aurora Flight Sciences. Quite unique design approaches are available: a tiltrotor, tilt-duct, tilt-wing, and separate rotors for cruise and hover; as well as a multirotor, autogiro for conventional and compound helicopters; finally, a tilt-duct forcoaxial-rotor helicopters, and compound helicopters. Another problem is certification. From the authors’ experience, based on the Agusta-Bell 609 certification [
12], authorities will require a nearly complete certification for each degree of tilt of the moving parts, with the exception of the feathering propellers that have a separate certification path. In addition, certification authorities will require this situation to be handled if one or more of the movable parts is locked in a fixed position by a failure, or alternatively, will request complete actuating systems shut off [
13]. Proper recovery systems should be considered for every failure combination and included in the pilot’s notes. Very efficient systems such as ballistic parachutes may prevent the use of the aerial vehicle in urban areas. For this reason, this paper introduces a new concept for a hybrid air-taxi, based on attitude changing and not on rotating parts or additional propulsion systems. The concept is based on the Opener BlackFly idea [
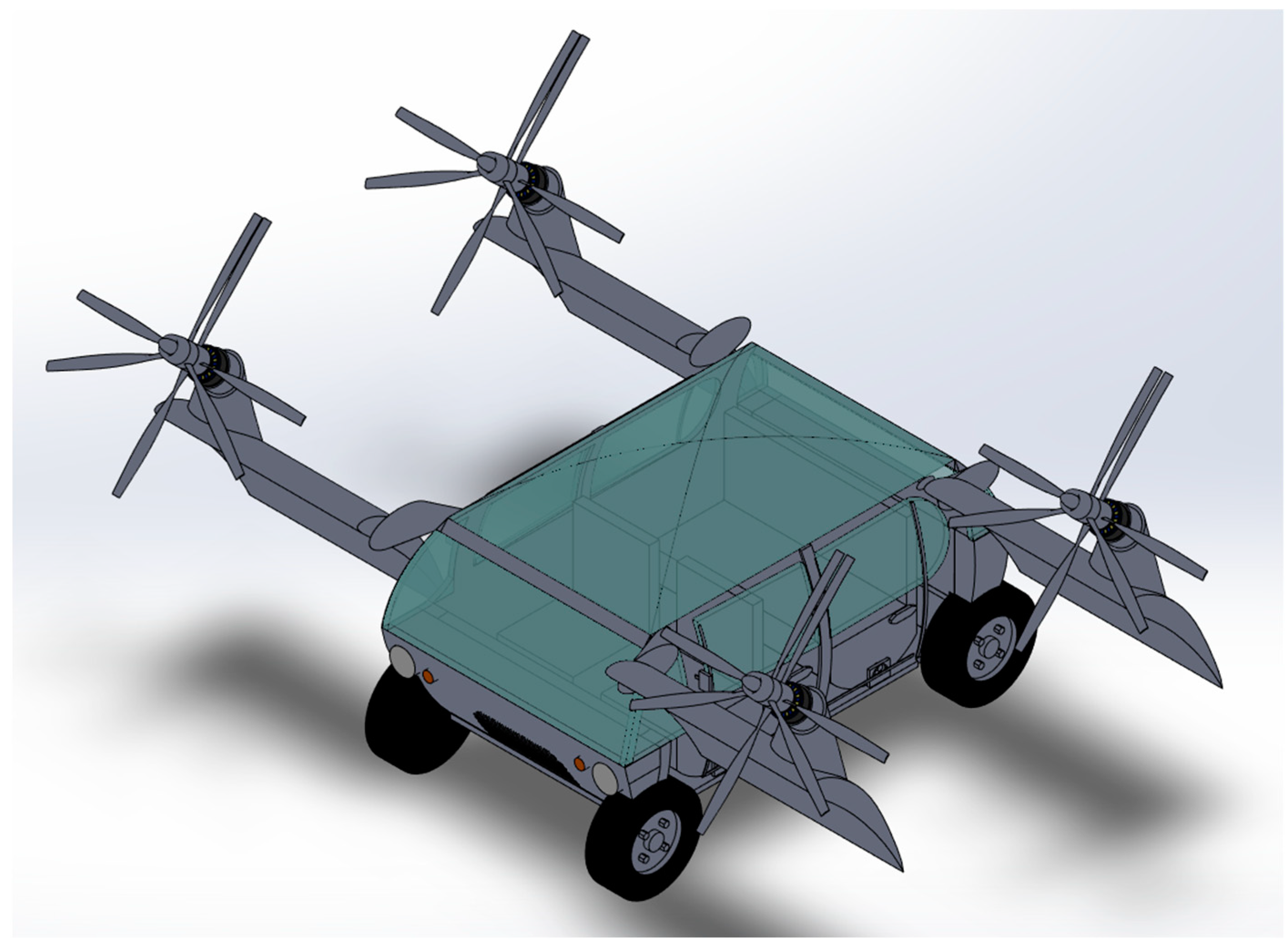
14], with modifications for the air-taxi application. Therefore, the vehicle has already been flight evaluated in a slightly different configuration. The authors replaced the original multimotor–rotor configuration with four identical contrarotating propellers. In addition, an undercarriage was added for taxiing. An APU was installed for range extension. The original two-seater configuration was replaced with a five-seat fuselage.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}