
Spherical Indoor Coandă Effect Drone (SpICED): A Spherical Blimp sUAS for Safe Indoor Use



Abstract
:1. Introduction
1.1. Literature Review
1.2. Contributions of This Work
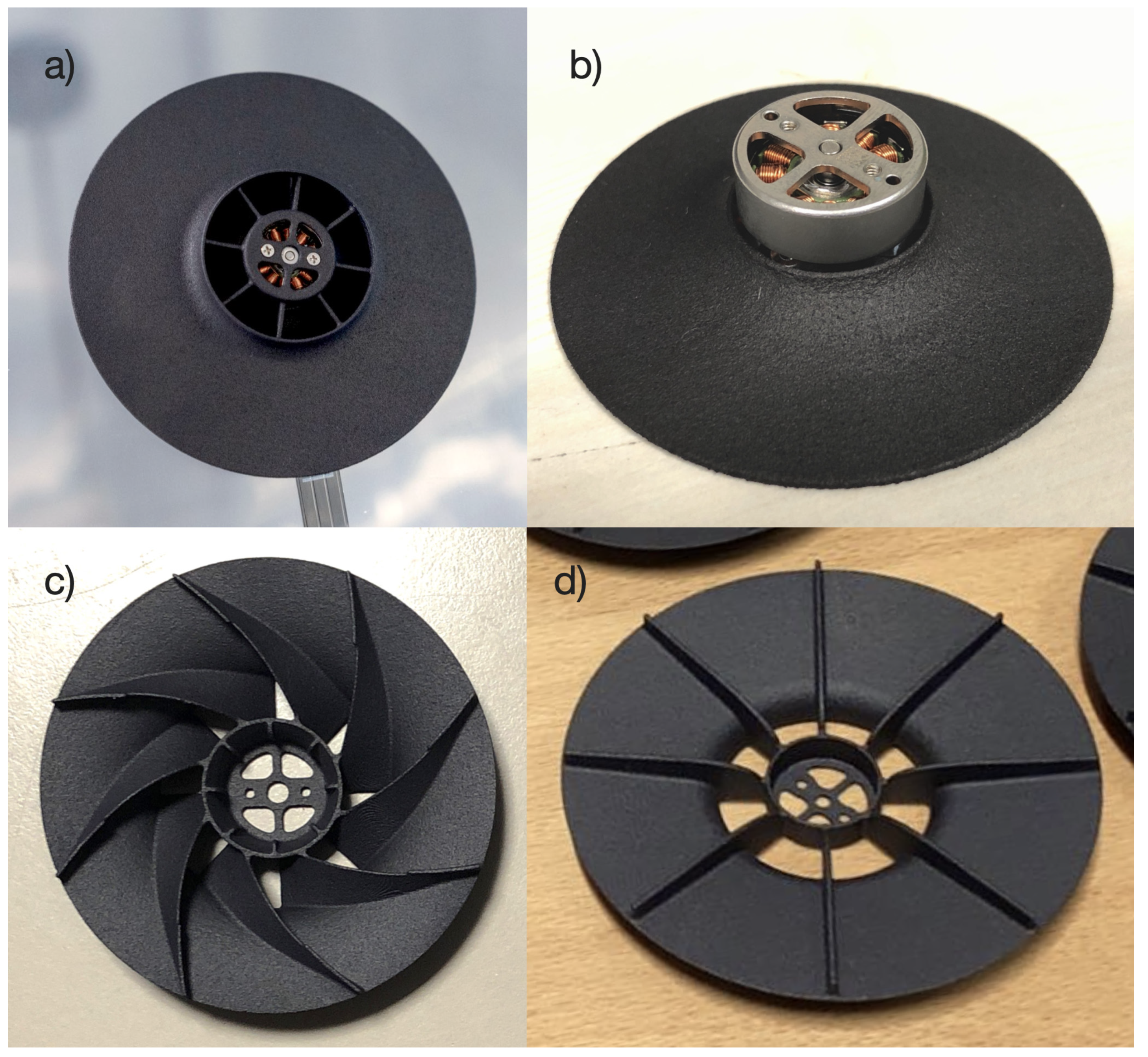
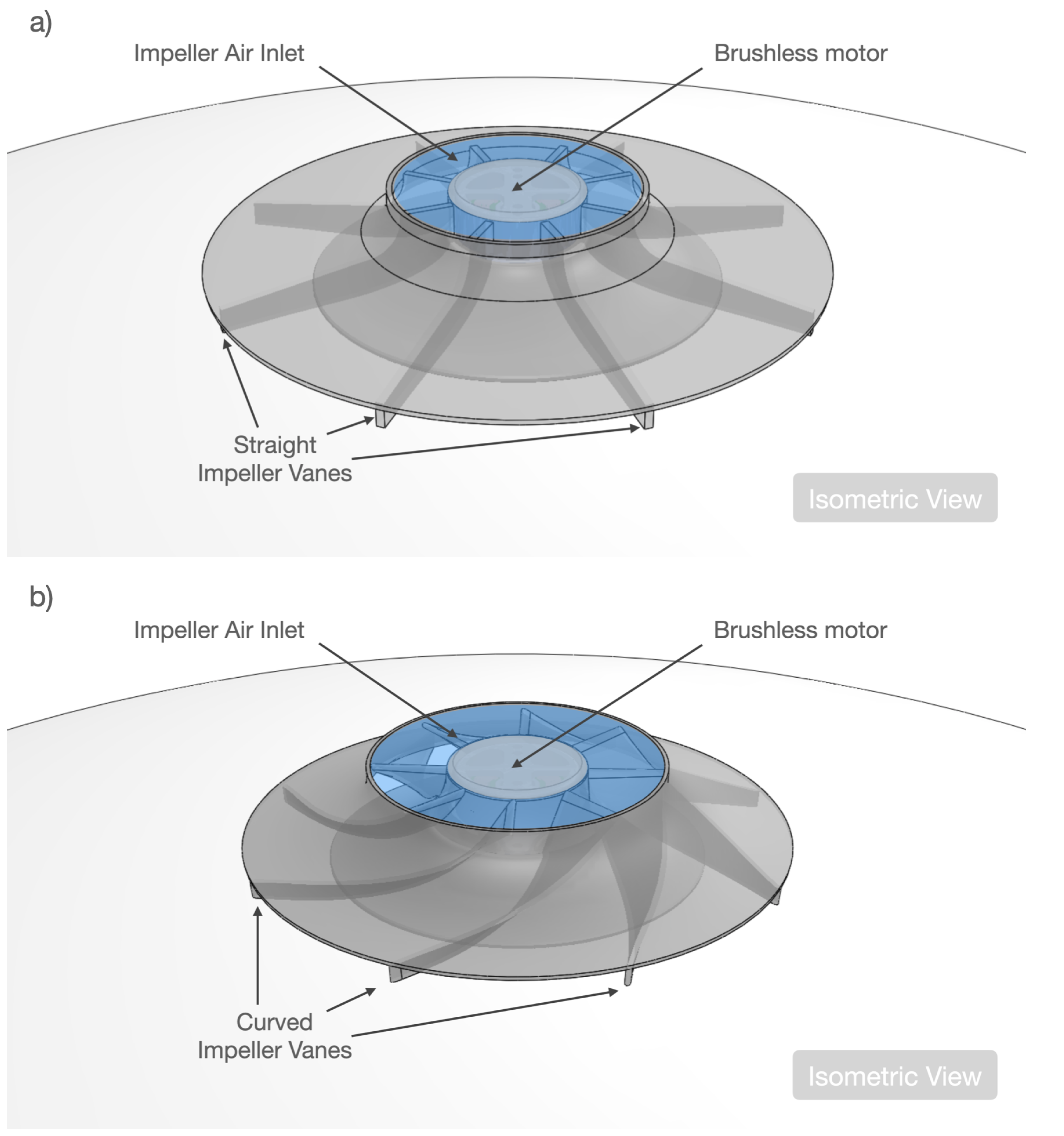
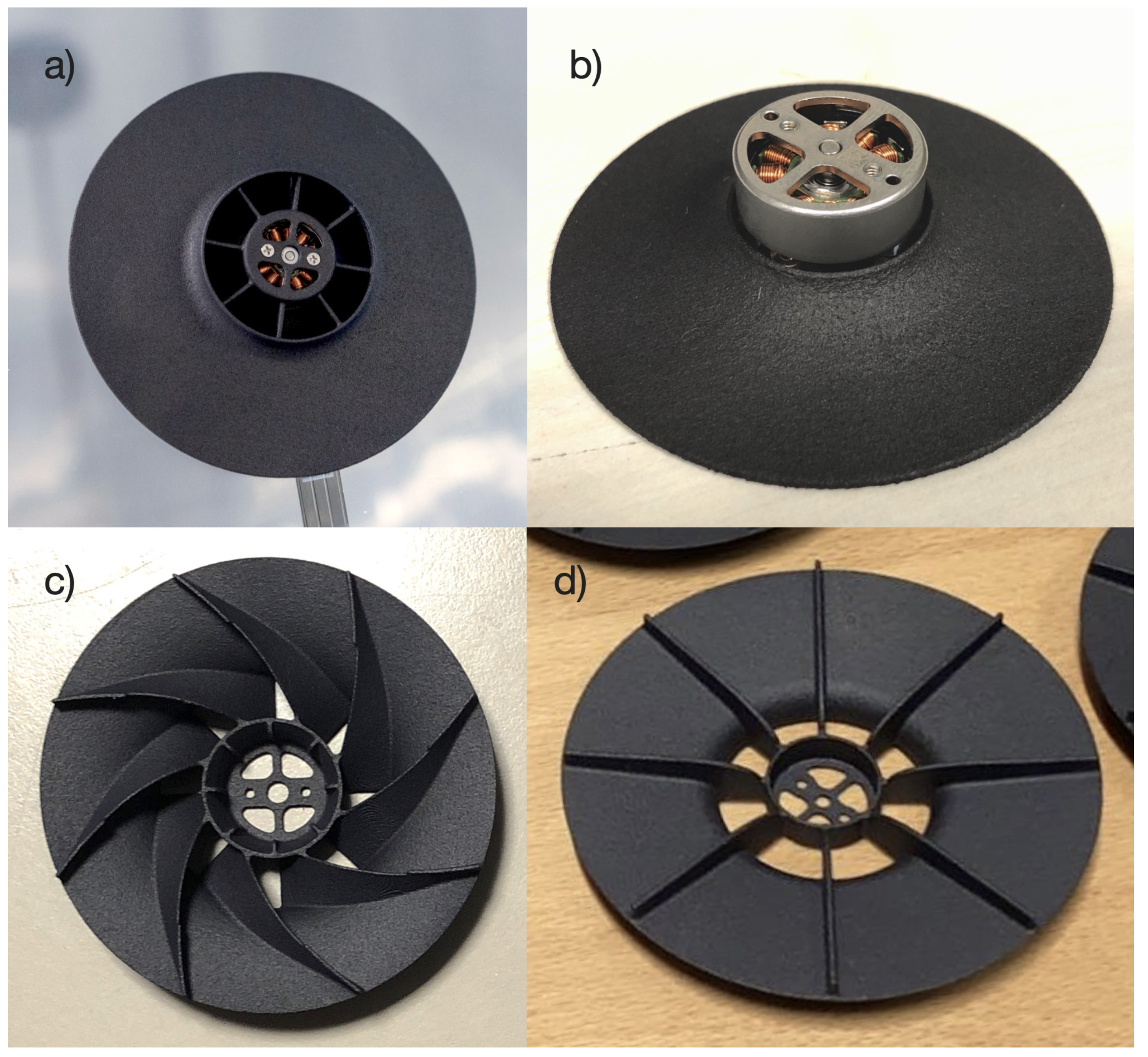
- The introduction of a uni-directional Propulsion Unit (PU) made up of a closed impeller with curved vanes, and eacomparison between the uni-directional PU and the bi-directional PU with straight vanes, as presented in the previous paper [20].
- The introduction of the cube configuration propulsion system with eight PUs, which eliminates the need for bi-directional PU as compared to the other configurations.
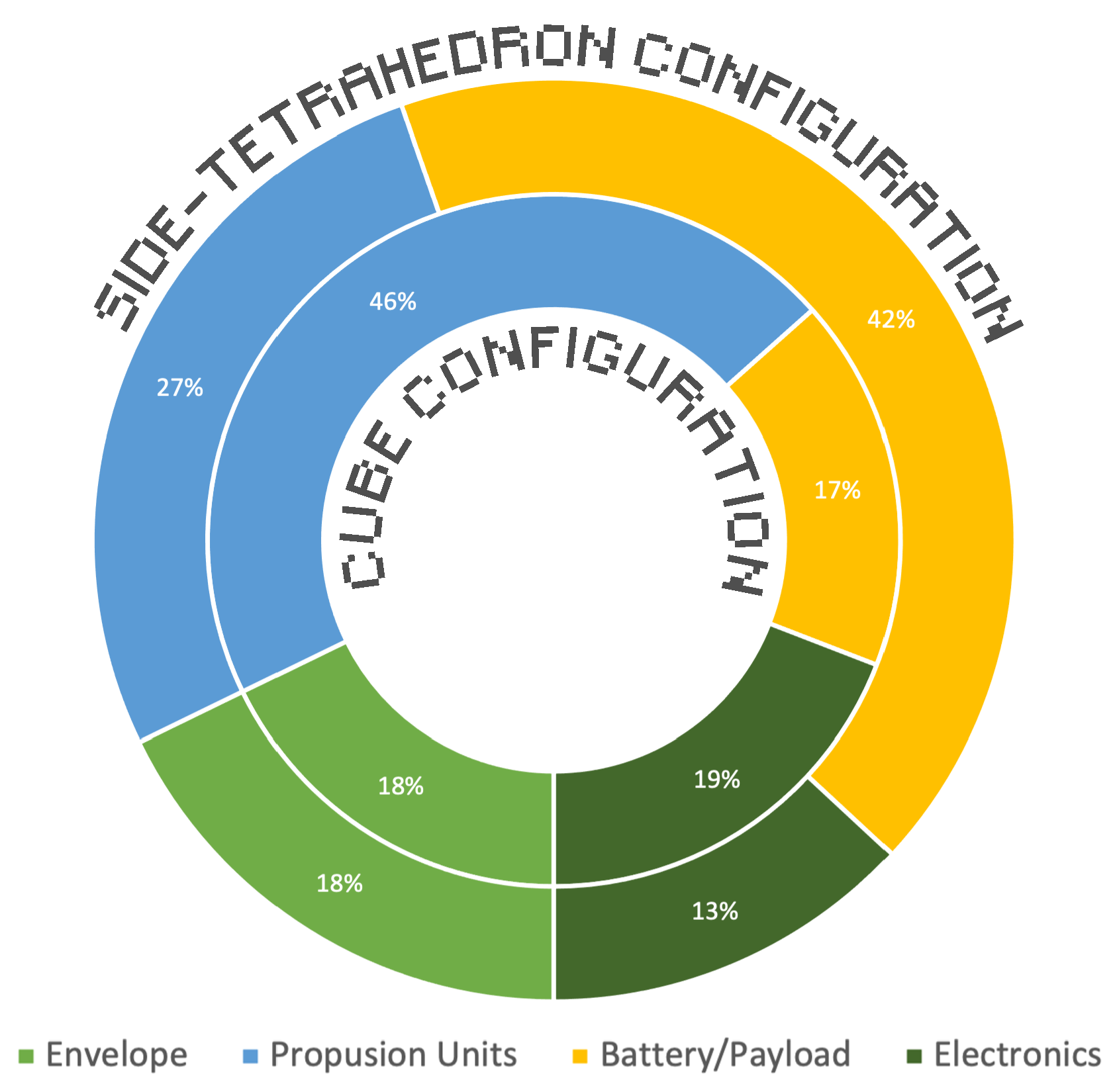
- Experimental results of both the uni-directional PU’s performance and the closed-loop flight control of the blimp sUAS prototype with cube configuration, with a comparison to the prebiously explored side-tetra configuration.
2. Design of SpICED
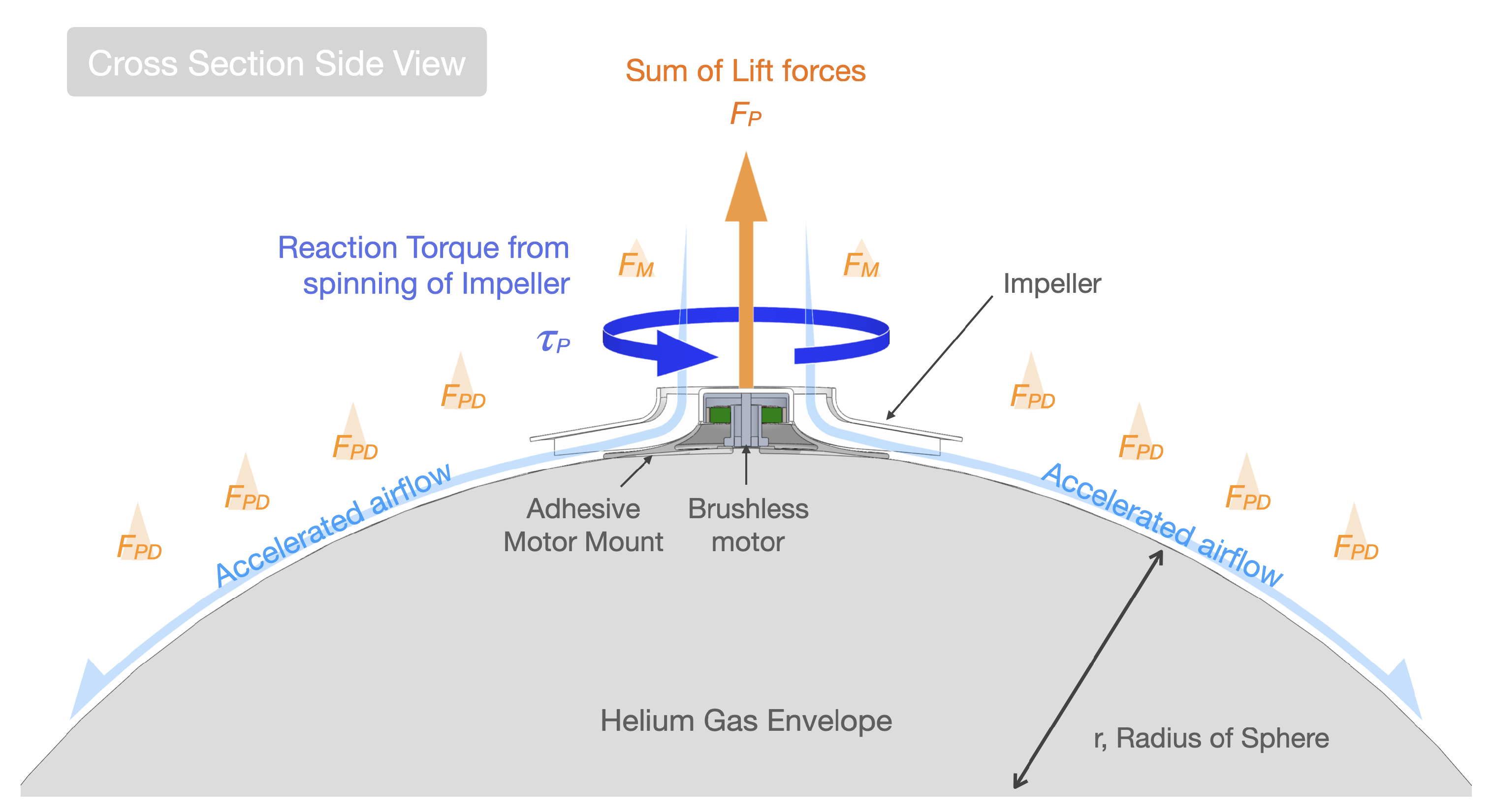
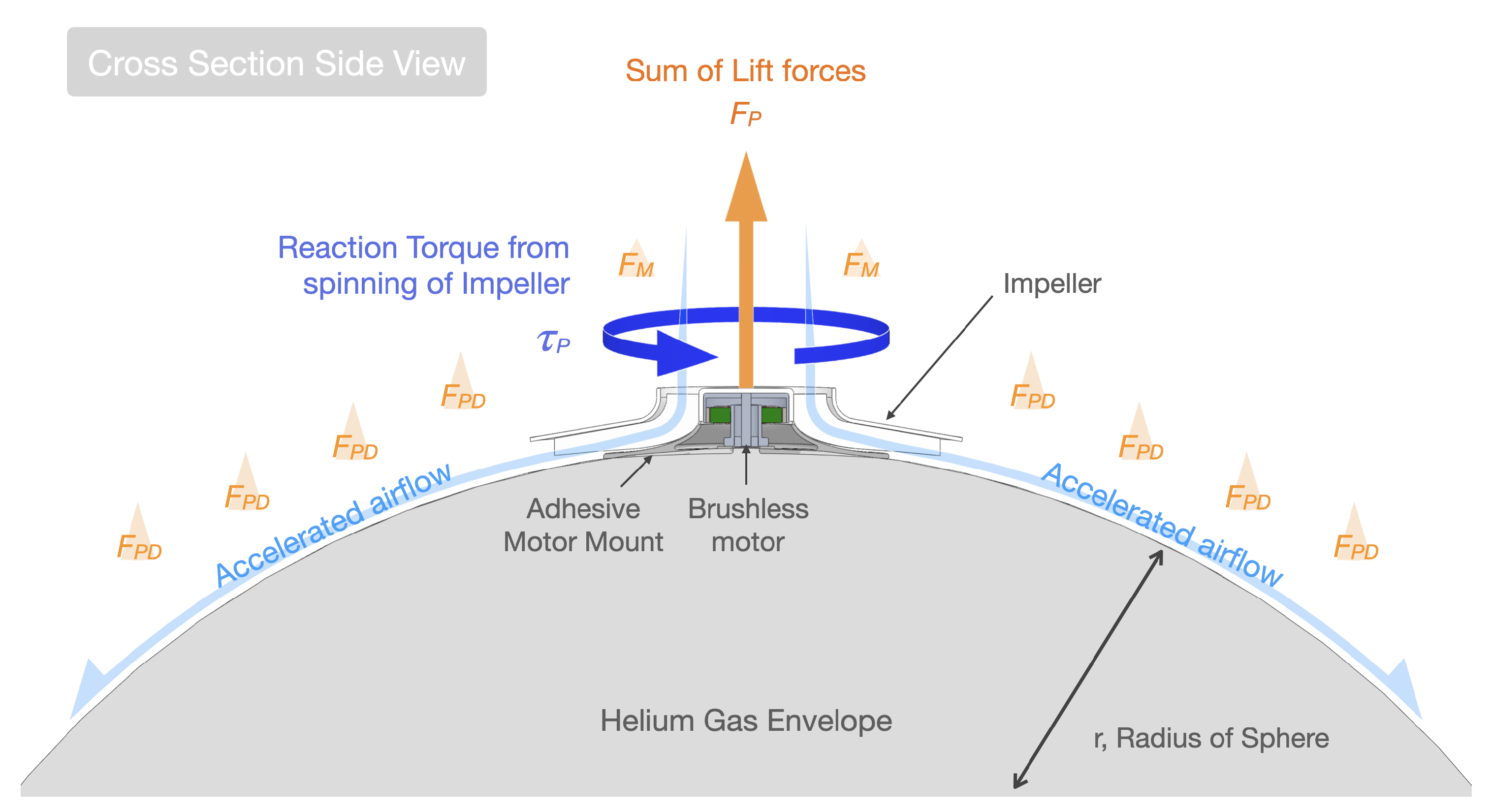
2.1. Design of the Propulsion Unit (PU)
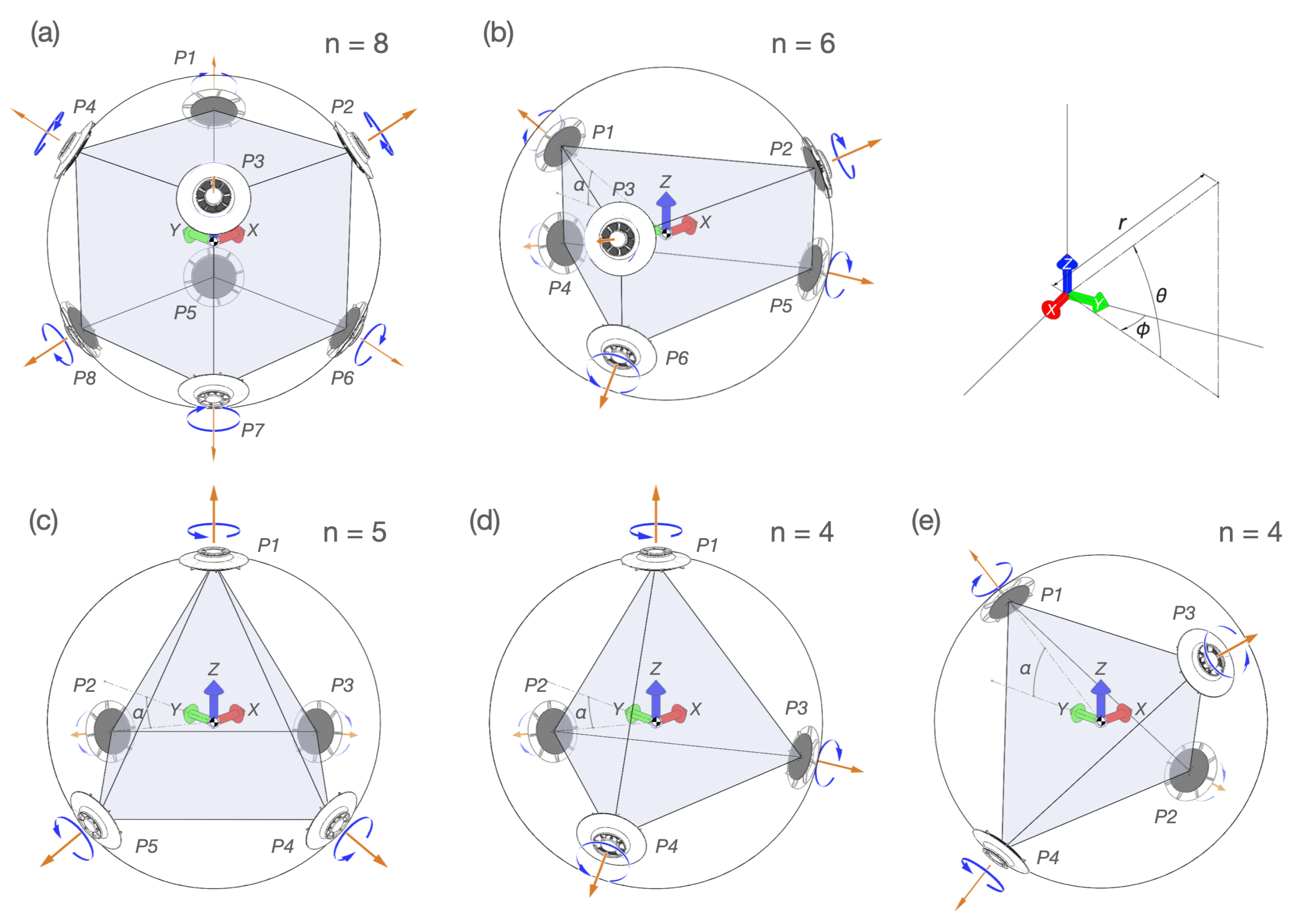
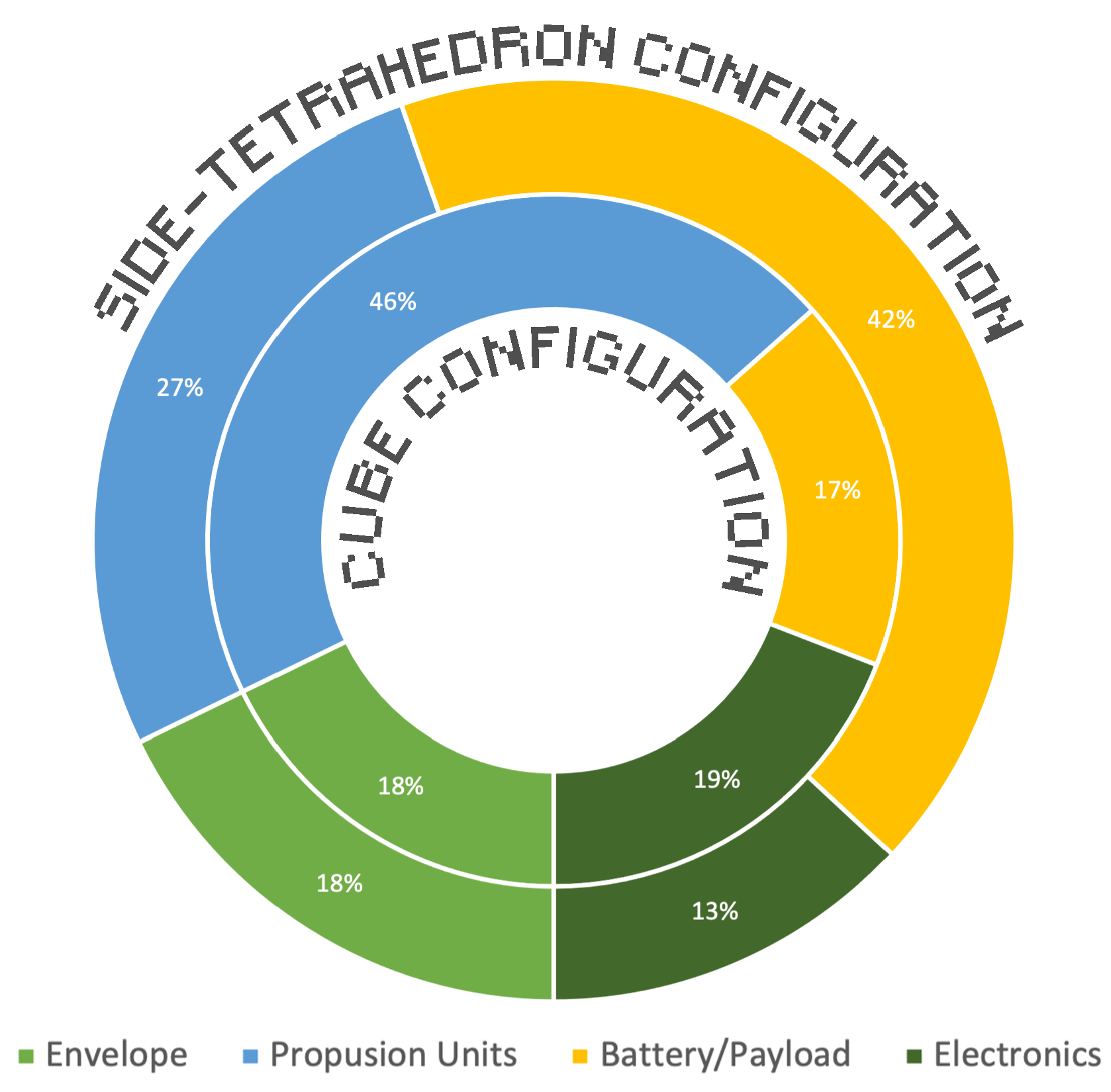
2.2. Multi-Unit Propulsion System Configurations
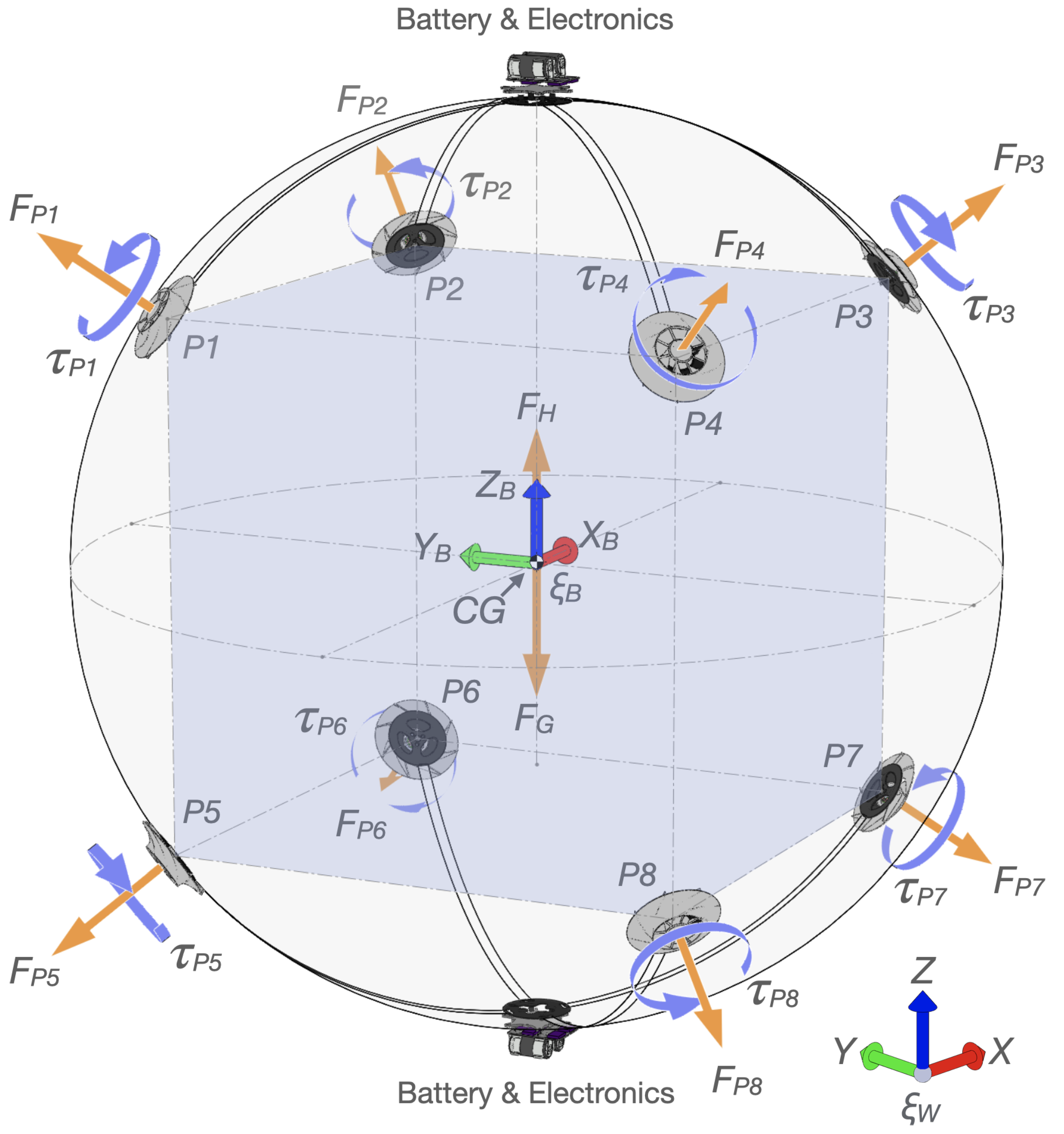
2.3. System Dynamics and Control of Multi-Unit Propulsion Blimp
Dynamic Model of Cube Configuration
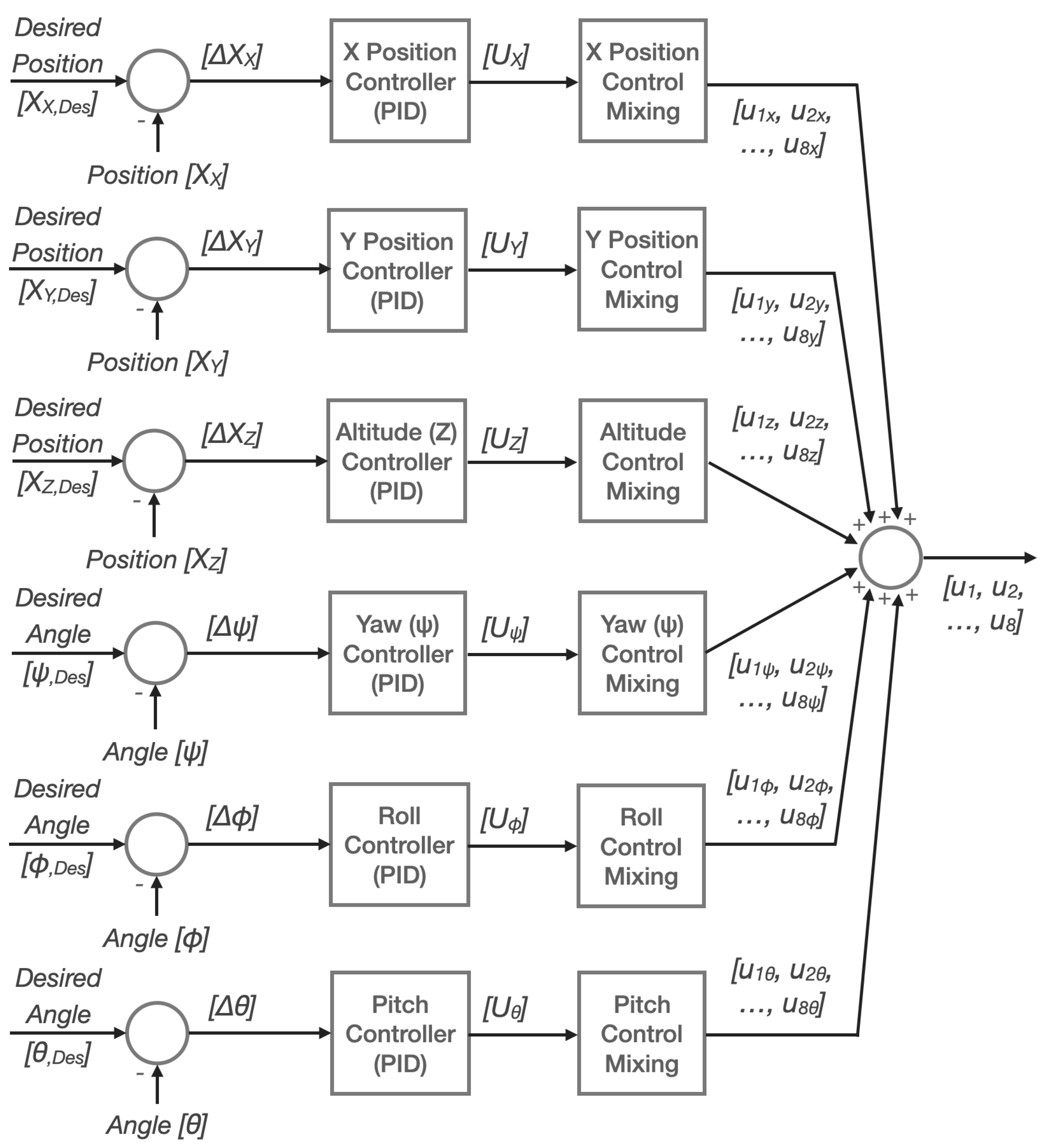
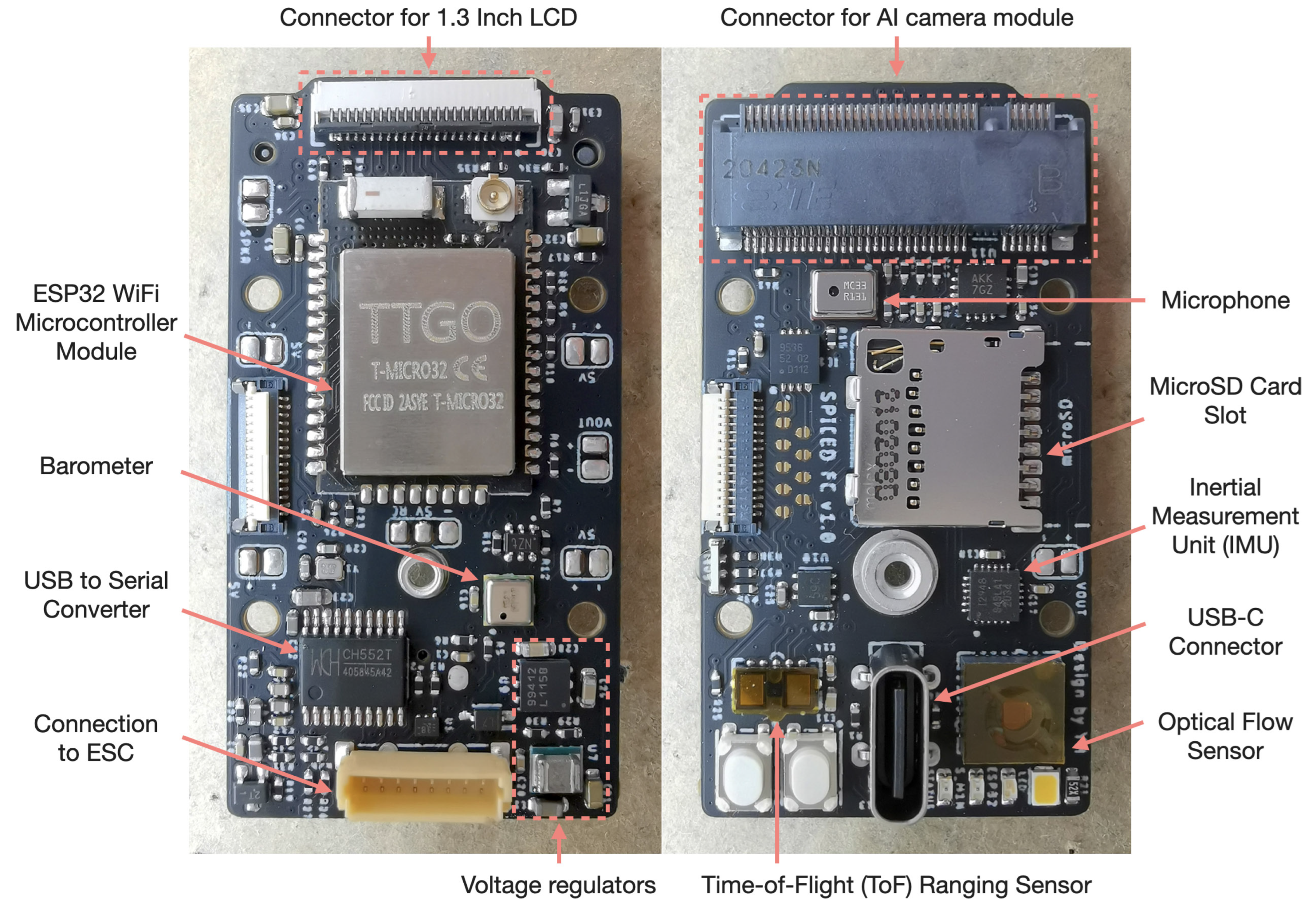
2.4. Closed Loop Control System
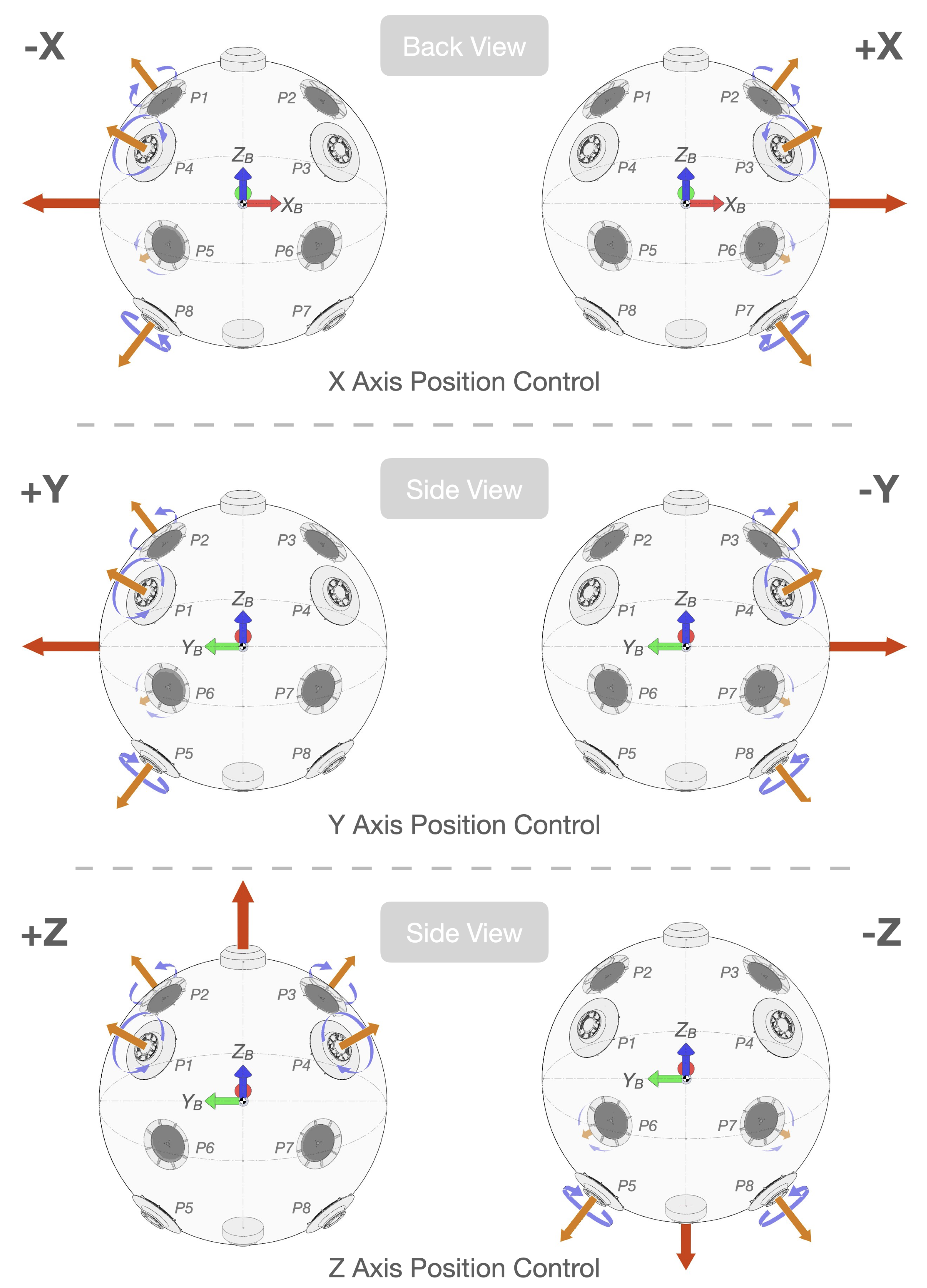
2.5. Control Output Mixing for Cube Configuration
3. Prototype and Experimental Design
3.1. Propulsion Unit Prototype
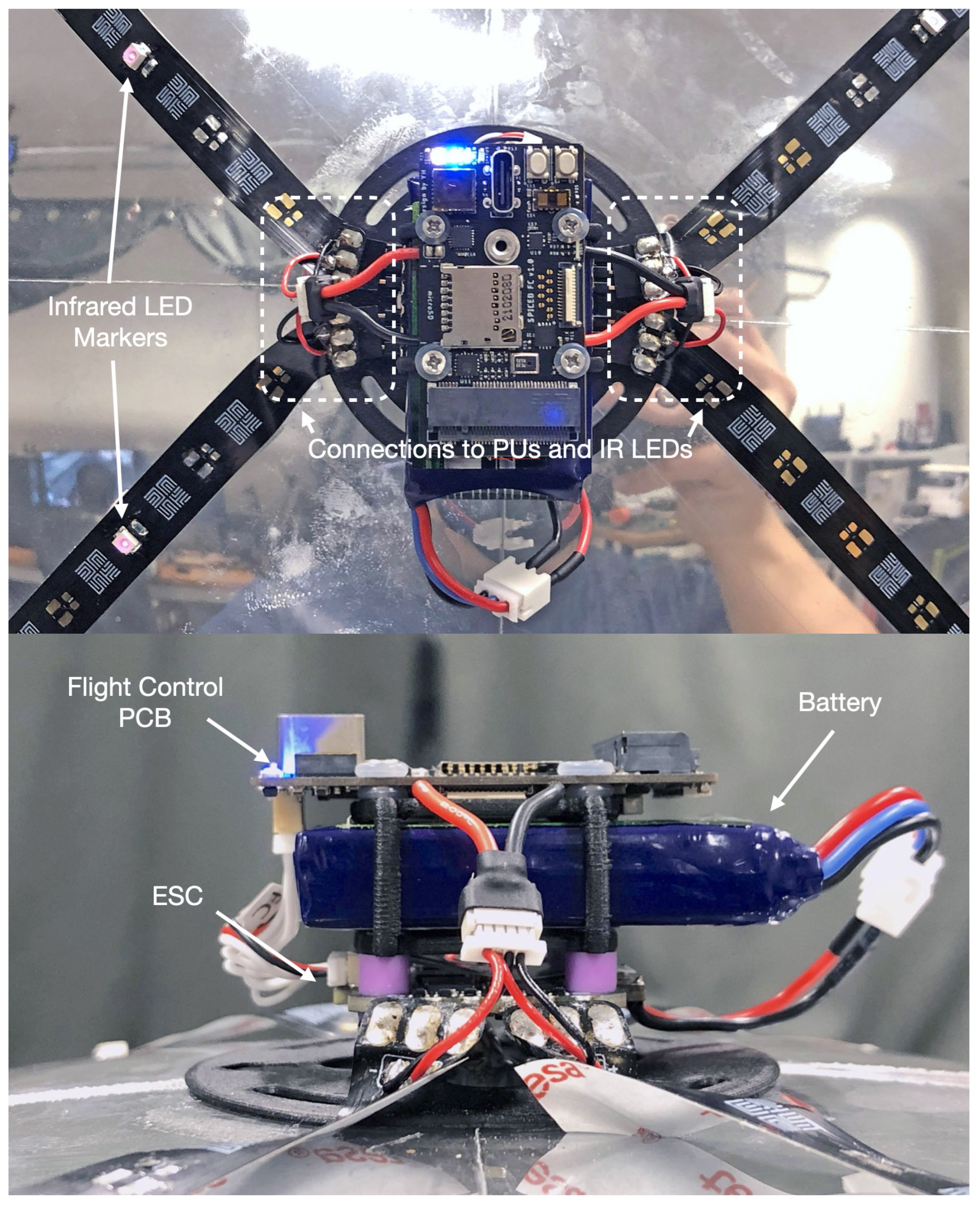
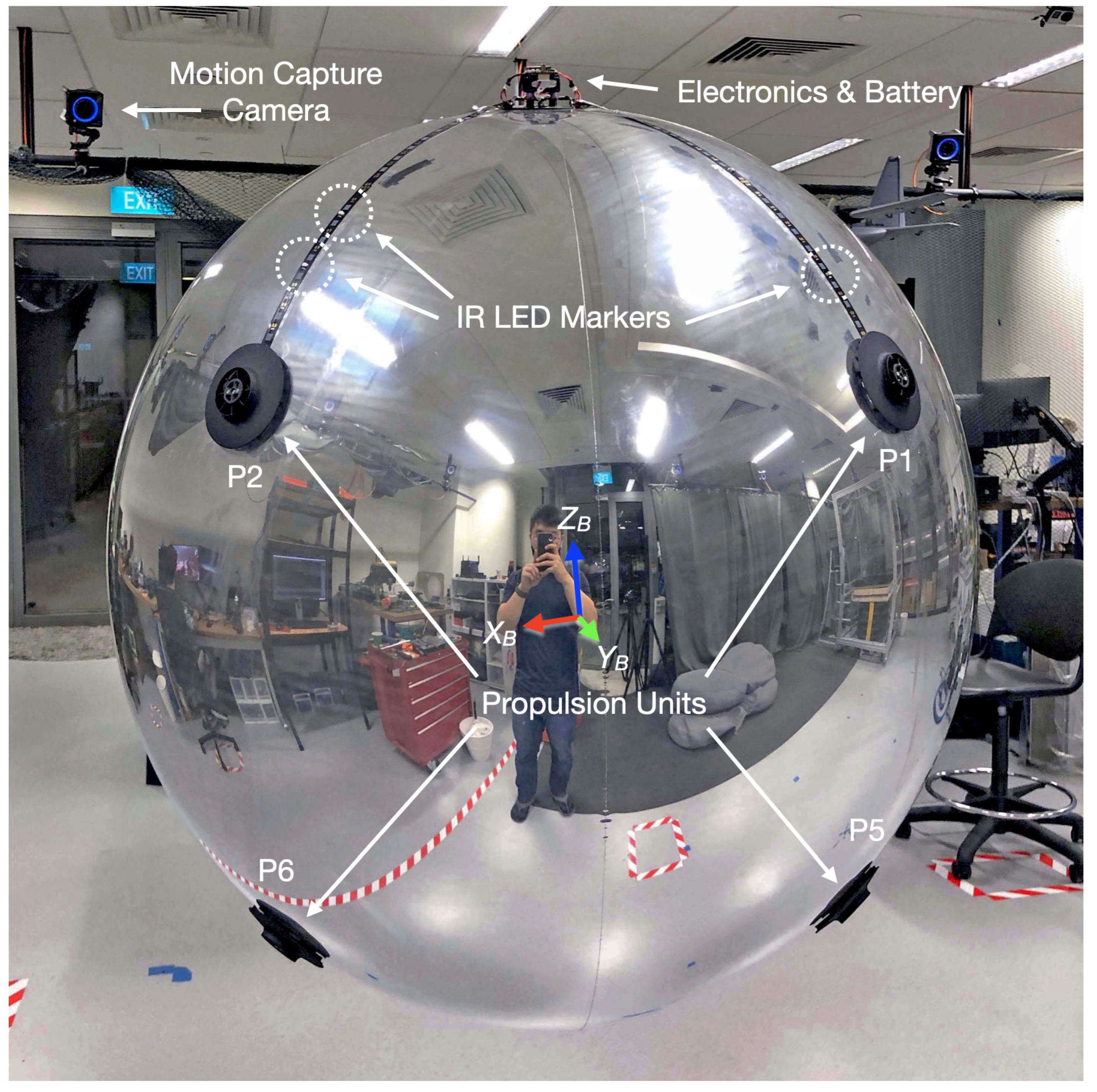
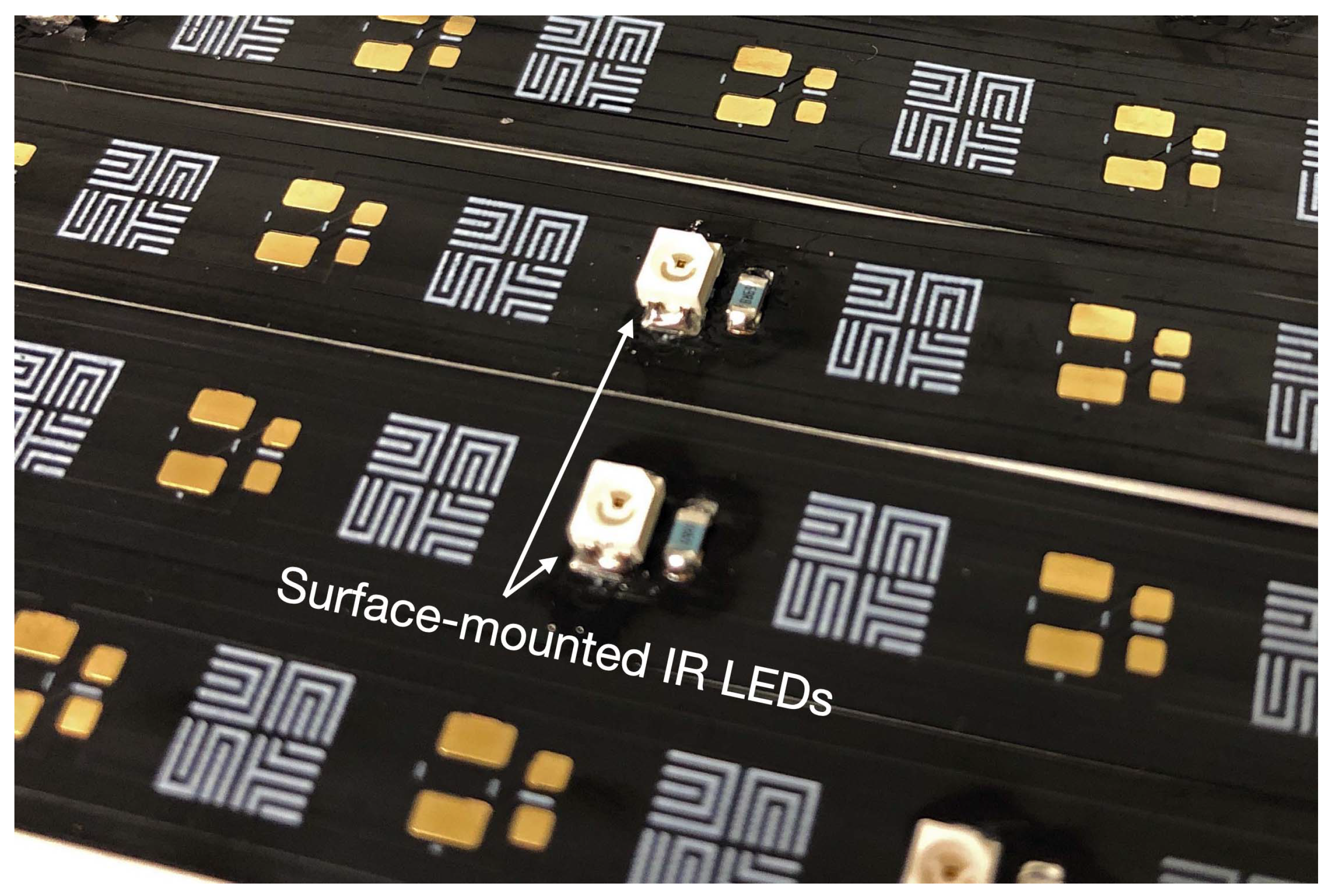
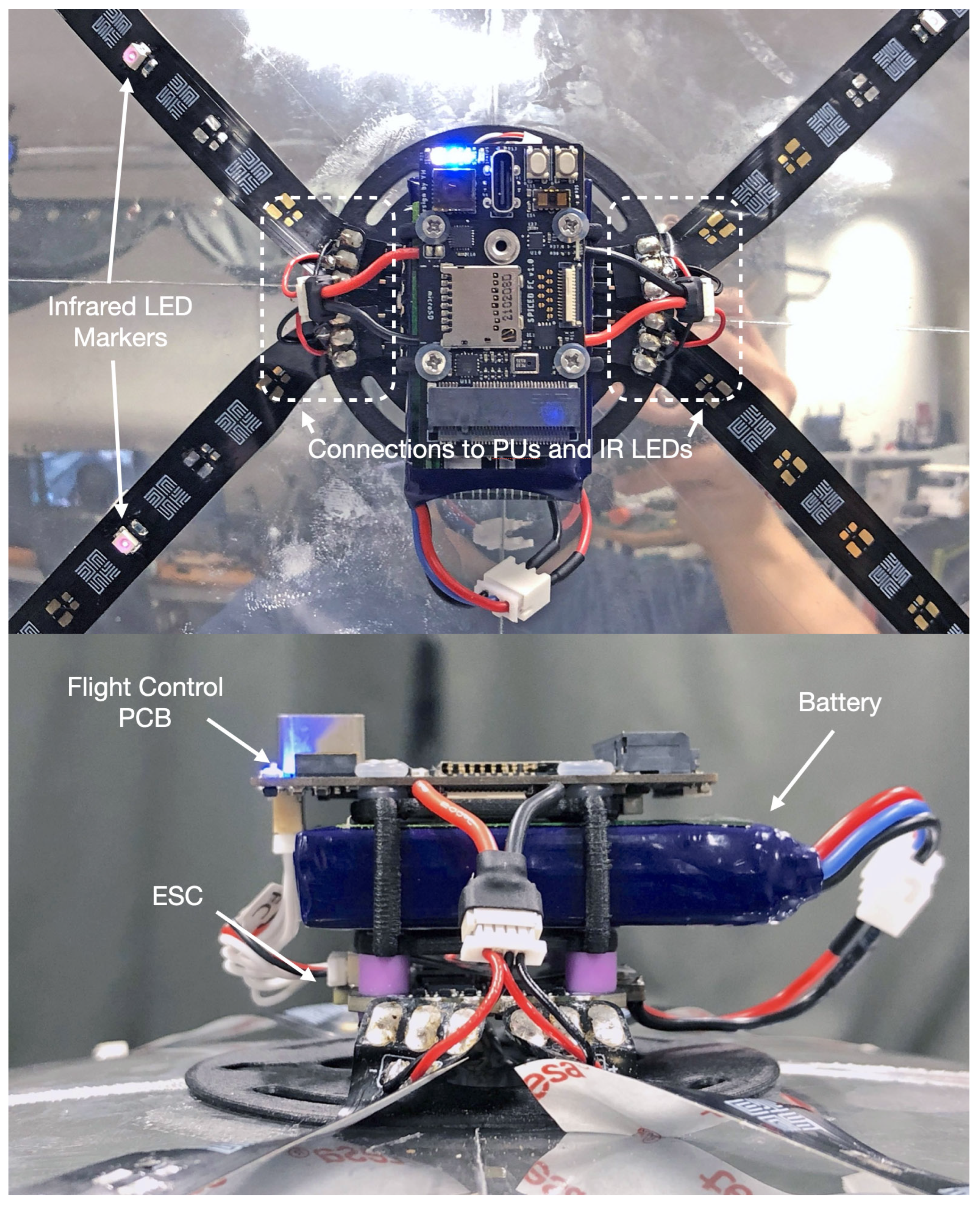
3.2. Cube Prototype
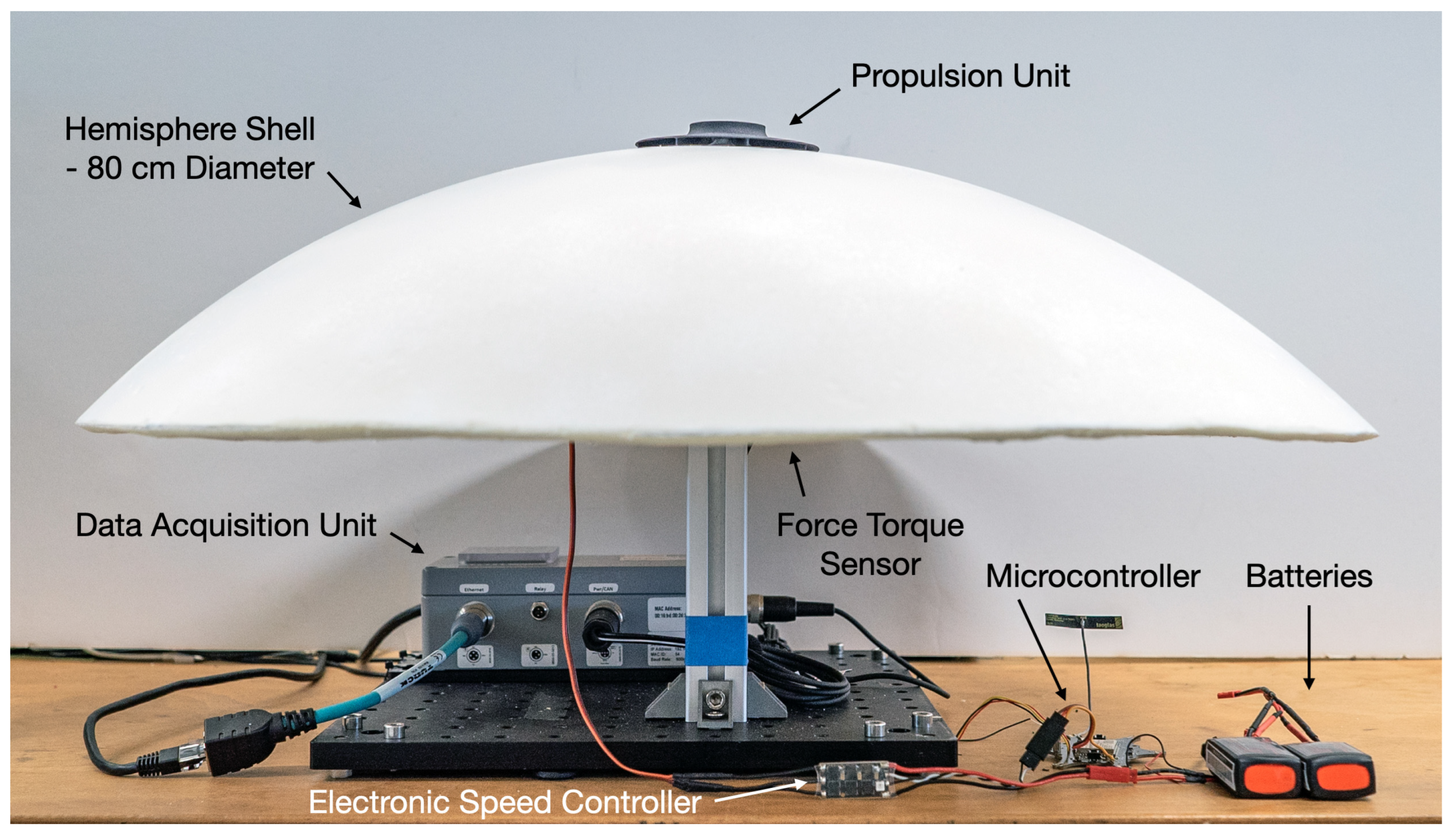
3.3. Propulsion Unit Performance Measurement Setup
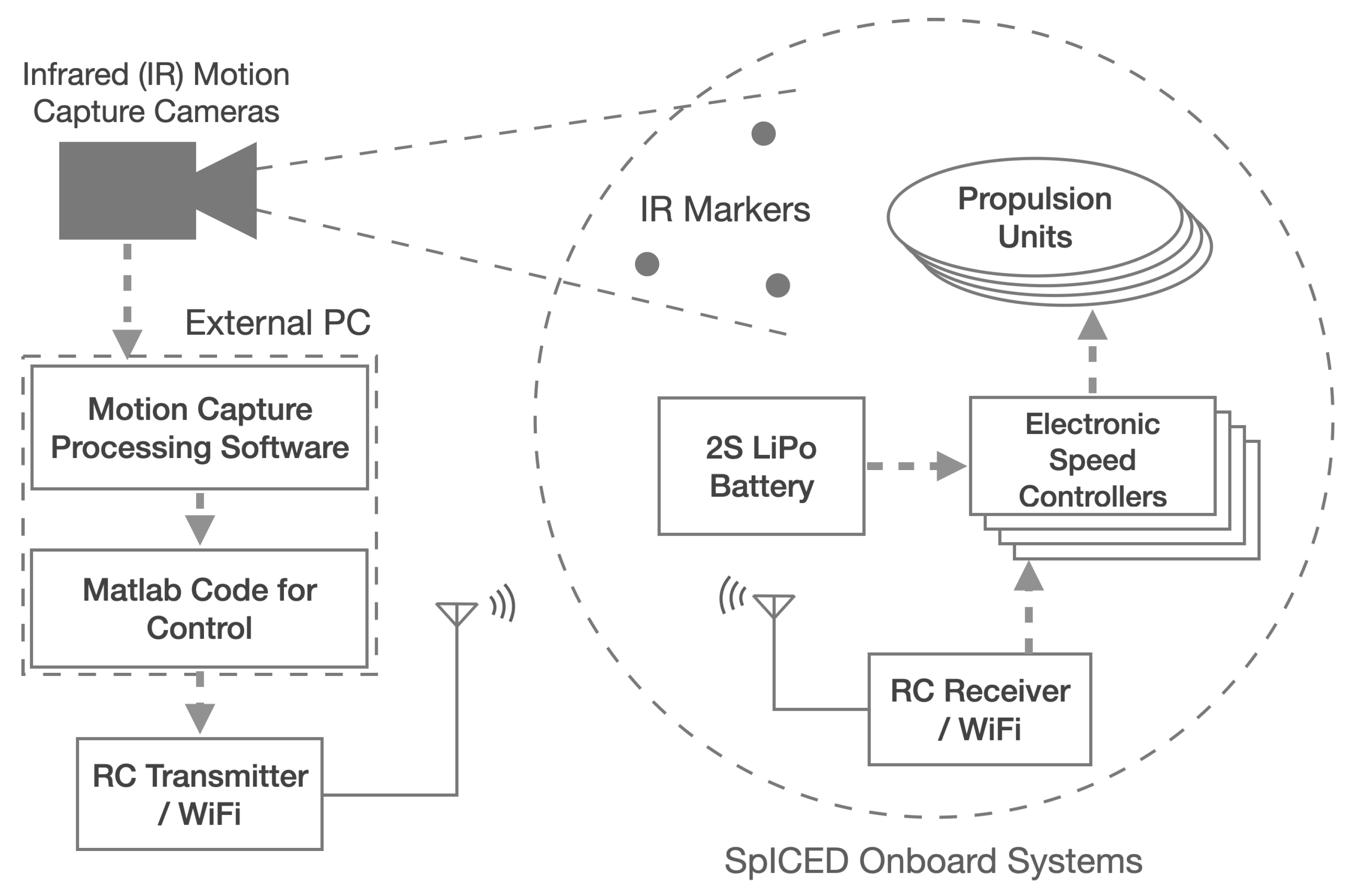
3.4. Closed-Loop Control Experiment Setup
4. Experiment Results
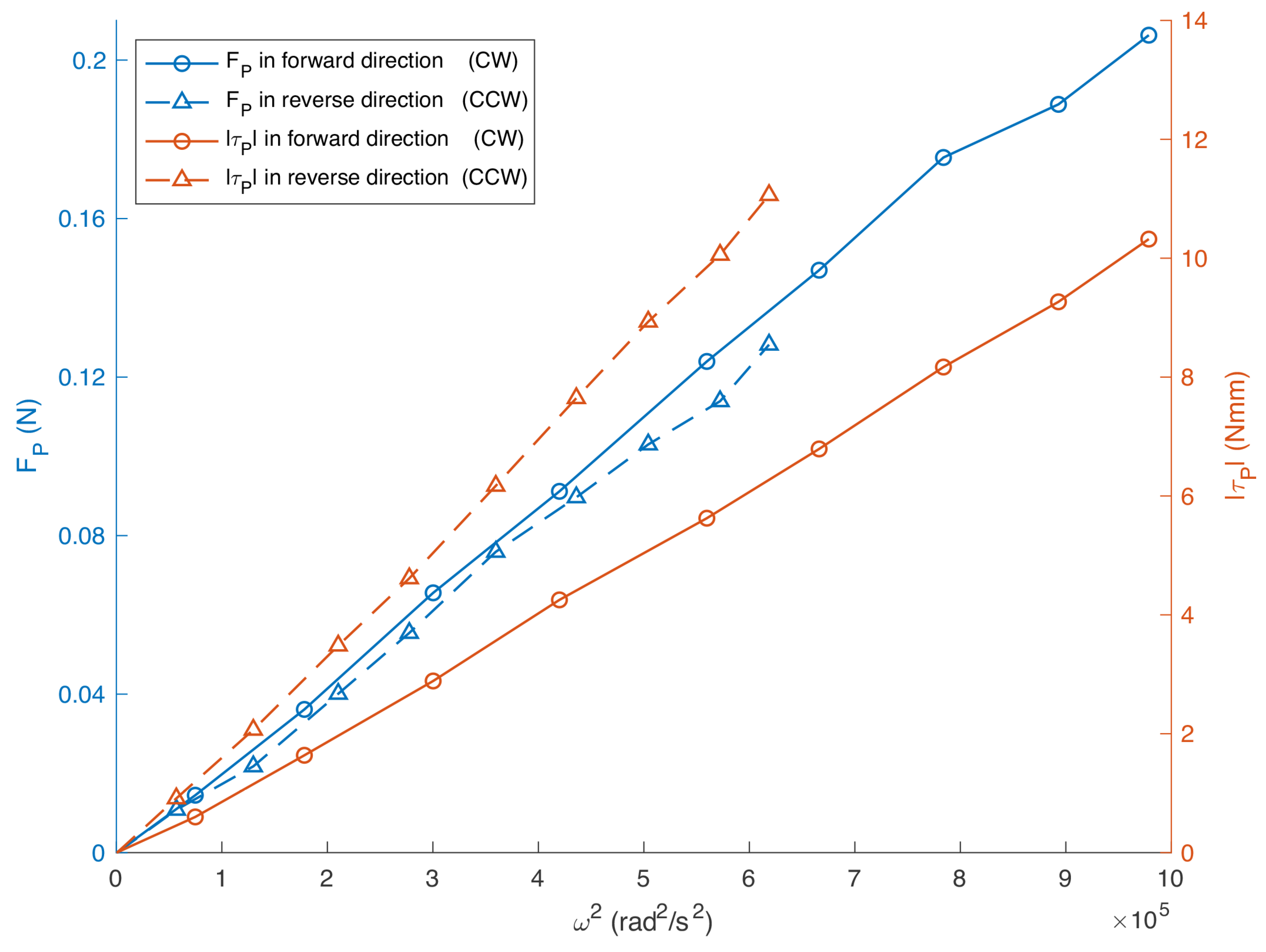
4.1. Performance Results of Propulsion Unit Prototypes
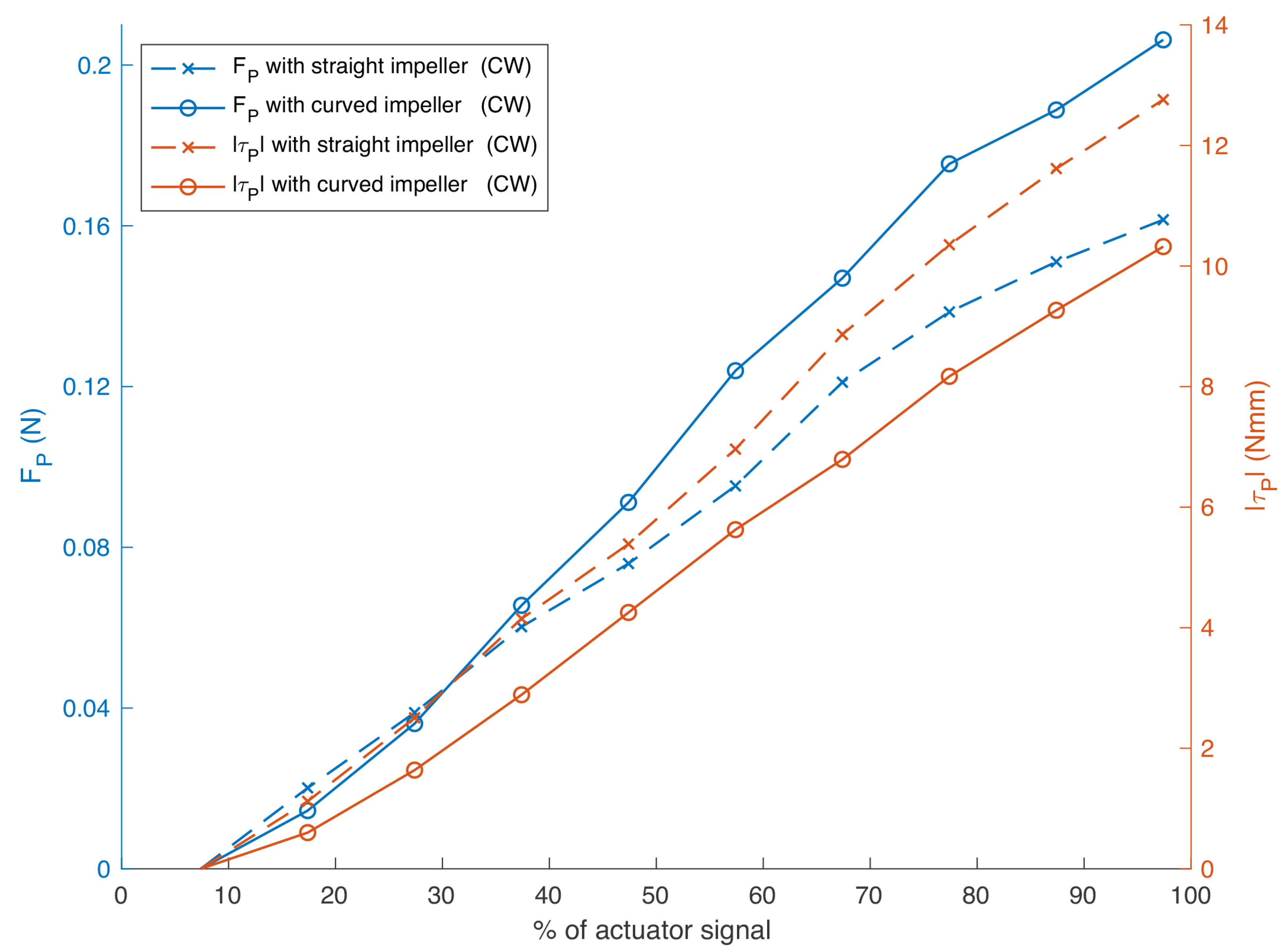
4.1.1. Uni-Directional Propulsion Unit with Curved Vane Impeller
4.1.2. Comparison between Bi-Directional and Uni-Directional PUs
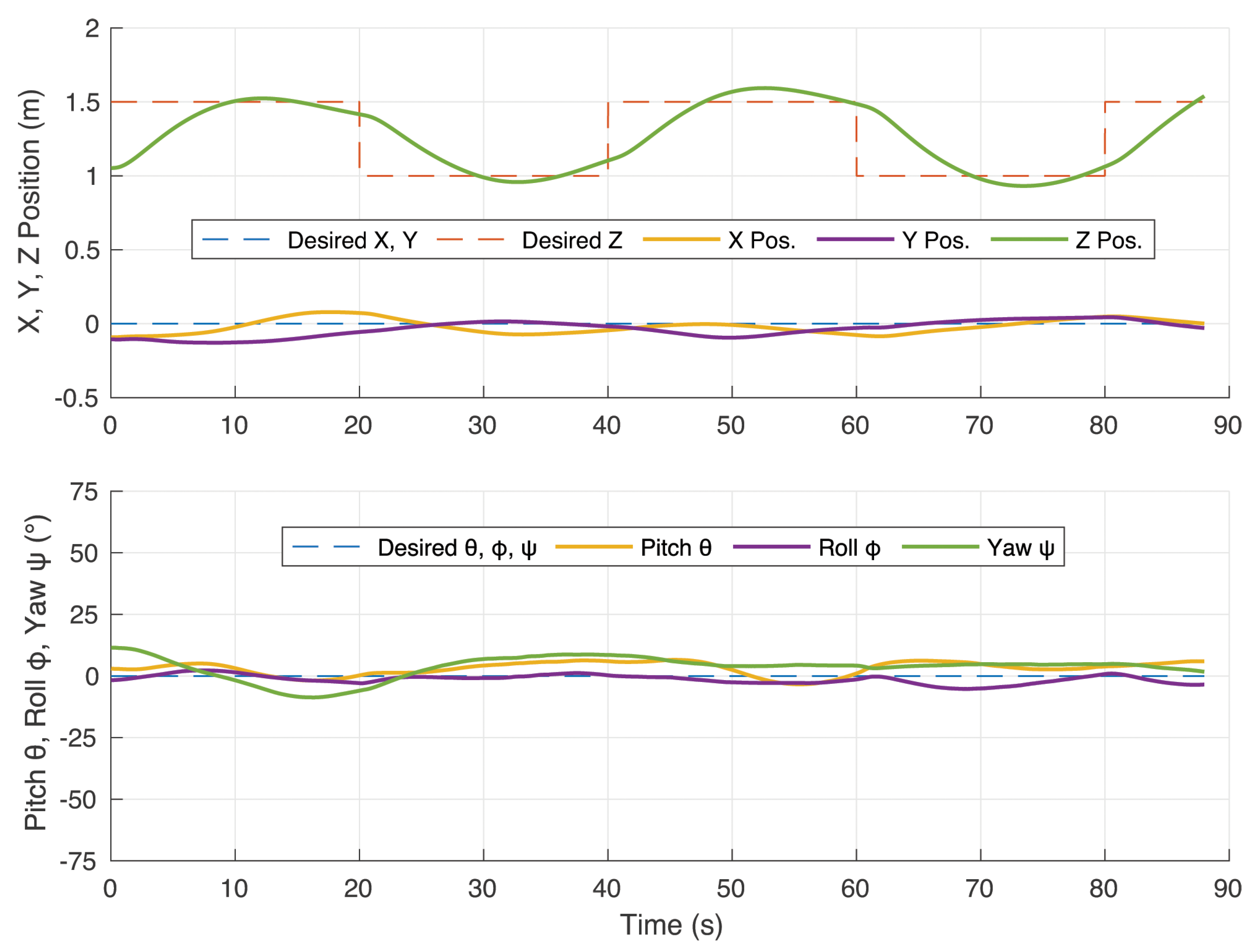
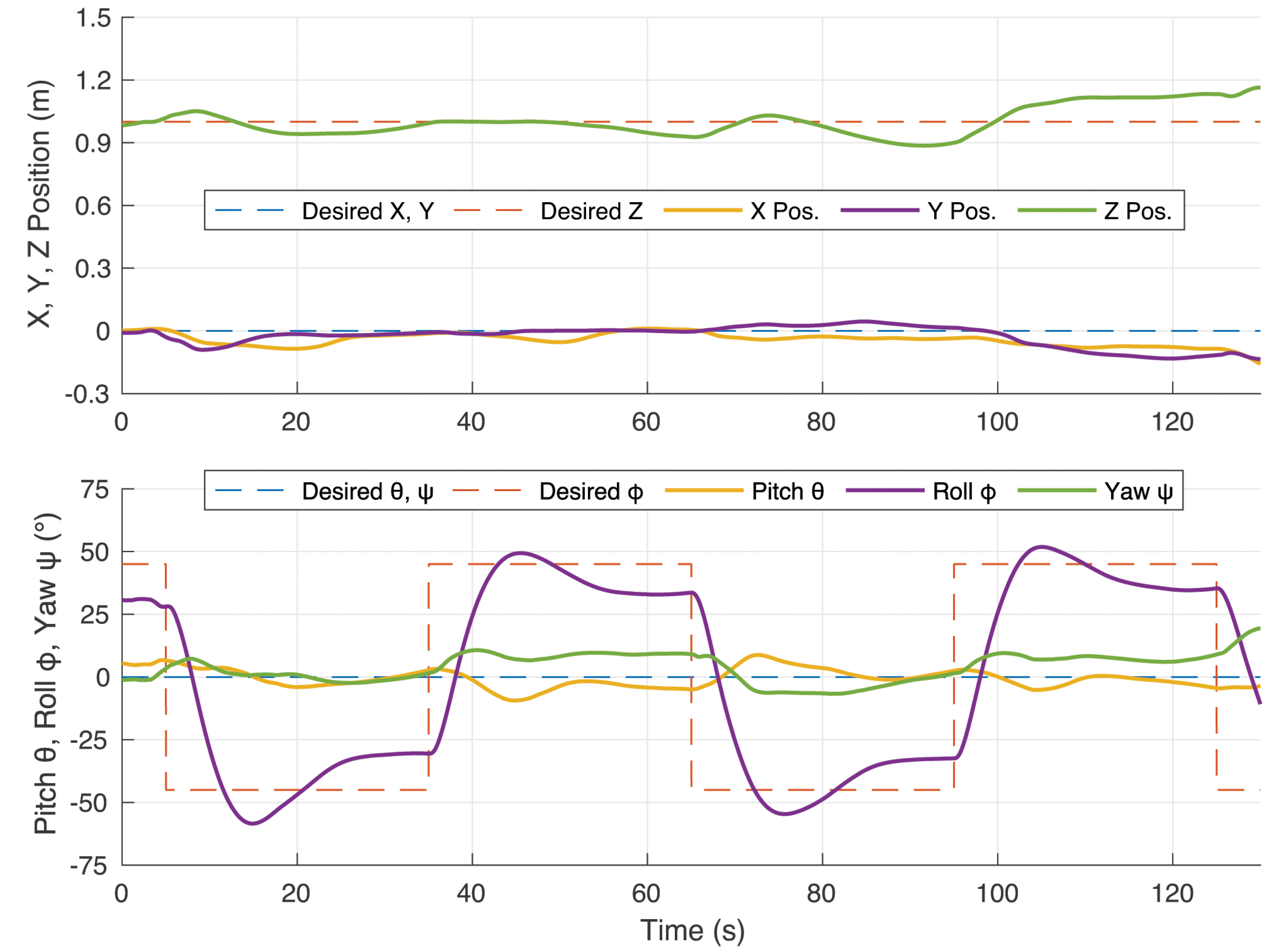
4.2. Step Control Response for Altitude, Pitch, Roll and Yaw Control
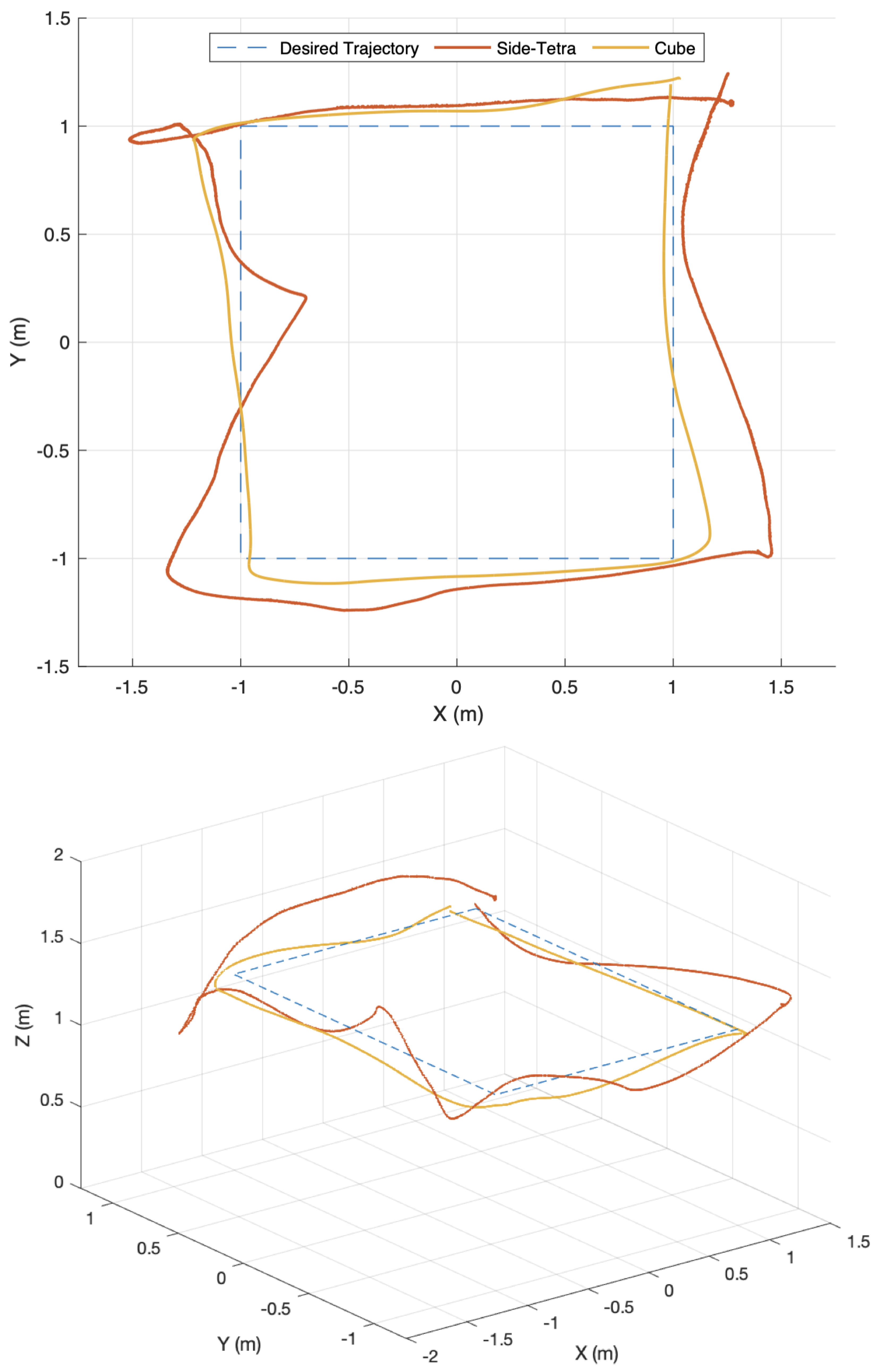
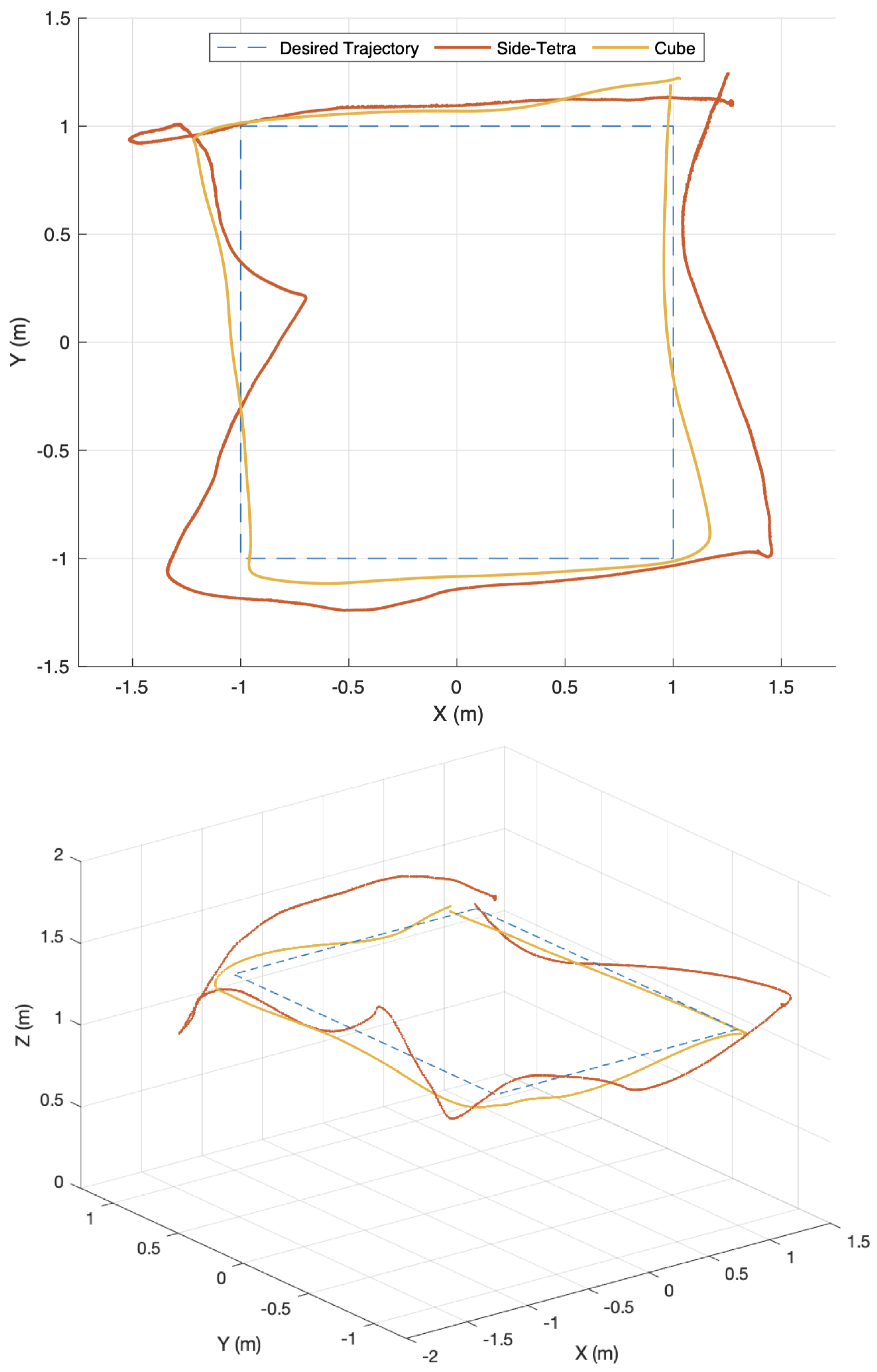
4.3. 2D Waypoint Tracking Performance
5. Conclusions
Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Drones, A. Drone Noise Levels. 2020. Available online: https://www.airbornedrones.co/drone-noise-levels/ (accessed on 21 July 2021).
- DJI. Phantom 4 Pro. Available online: https://www.dji.com/sg/phantom-4-pro (accessed on 26 July 2021).
- Johnson, J.A.; Svach, M.R.; Brown, L.H. Drone and Other Hobbyist Aircraft Injuries Seen in U.S. Emergency Departments, 2010–2017. Am. J. Prev. Med. 2019, 57, 826–829. [Google Scholar] [CrossRef]
- Burri, M.; Gasser, L.; Käch, M.; Krebs, M.; Laube, S.; Ledergerber, A.; Meier, D.; Michaud, R.; Mosimann, L.; Müri, L.; et al. Design and control of a spherical omnidirectional blimp. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1873–1879. [Google Scholar]
- Juang, M. That’s no Balloon, It’s a Drone! Halo Takes to the Skies as Latest Trend in UAVs. 2017. Available online: https://www.cnbc.com/2017/05/06/thats-no-balloon-its-a-drone-halo-takes-to-the-skies-as-latest-trend-in-uavs.html (accessed on 5 July 2021).
- Sharf, I.; Persson, S.; St-Onge, D.; Reeves, N. Development of Aerobots for Satellite Emulation, Architecture and Art; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Panasonic. Panasonic Develops Ballooncam™ Prototype, A Drone System for Staging Sports And Events. 2016. Available online: https://news.panasonic.com/global/topics/2016/45314.html (accessed on 6 July 2021).
- Festo. eMotionSpheres. 2014. Available online: https://www.festo.com/group/en/cms/10220.htm (accessed on 5 July 2021).
- Festo. FreeMotionHandling. 2017. Available online: https://www.festo.com/group/en/cms/11957.htm (accessed on 5 July 2021).
- Festo. AirPenguins. 2009. Available online: https://www.festo.com/group/en/cms/10242.htm (accessed on 5 July 2021).
- Festo. Air_ray. 2010. Available online: https://www.festo.com/group/en/cms/10245.htm (accessed on 5 July 2021).
- Festo. AirJelly. 2010. Available online: https://www.festo.com/group/en/cms/10244.htm (accessed on 5 July 2021).
- Poon, H.S.; Lam, M.K.; Chow, M.; Li, W.J. Noiseless and vibration-free ionic propulsion technology for indoor surveillance blimps. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2891–2896. [Google Scholar]
- Yamada, W.; Manabe, H.; Ikeda, D. Zerone: Safety drone with blade-free propulsion. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Scotland, UK, 4–5 May 2019; pp. 1–8. [Google Scholar]
- Song, S.H.; Shon, H.; Yeon, G.; Choi, H. Design and Implementation of Cloud-Like Soft Drone S-Cloud. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Magister, T. The small unmanned aircraft blunt criterion based injury potential estimation. Saf. Sci. 2010, 48, 1313–1320. [Google Scholar] [CrossRef]
- Bir, C.; Viano, D. Design and Injury Assessment Criteria for Blunt Ballistic Impacts. J. Trauma 2005, 57, 1218–1224. [Google Scholar] [CrossRef] [PubMed]
- Sturdivan, L. Modeling in blunt trauma research. In Proceedings of the 2nd Annual Soft Body Armor Symposium, Miami Beach, FL, USA, 1 September 1976. [Google Scholar]
- Clare, V.R.; Lewis, J.H.; Mickiewicz, A.P.; Sturdivan, L.M. Blunt Trauma Data Correlation; Technical Report; Edgewood Arsenal Aberdeen Proving Ground: Edgewood, MD, USA, 1975. [Google Scholar]
- Pheh, Y.H.; Win, S.K.H.; Foong, S. SpICED: Design and Control of a Safe Spherical Blimp using Coandă Effect. In Proceedings of the 2021 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Delft, The Netherlands, 13–16 July 2021. [Google Scholar]
- Ahmed, R.; Talib, A.A.; Rafie, A.M.; Djojodihardjo, H. Aerodynamics and flight mechanics of MAV based on Coandă effect. Aerosp. Sci. Technol. 2017, 62, 136–147. [Google Scholar] [CrossRef]
- Eraslan, Y.; Özen, E.; Oktay, T. The Effect of Change in Angle Between Rotor Arms on Trajectory Tracking Quality of a PID Controlled Quadcopter. In Proceedings of the EJONS 10th International Conference on Mathematics, Engineering, NaturalMedical Sciences, Batumi, GA, USA, 15–17 May 2020. [Google Scholar]
- DJI. Mavic Mini. Available online: https://www.dji.com/sg/mavic-mini (accessed on 21 July 2021).
- HP. HP Multi Jet Fusion Technology. Available online: https://www.hp.com/us-en/printers/3d-printers/products/multi-jet-technology.html (accessed on 21 June 2021).
- HobbyKing. Turnigy Nano-Tech 550mAh 2S 65C Lipo Pack (E-Flite Compatible). 2022. Available online: https://hobbyking.com/en_us/turnigy-nano-tech-450mah-2s-65c-lipo-e-flite-compatible-blade-130x-eflb3002s35.html (accessed on 31 August 2022).
- Diatone. MAMBA F40 BLS MINI Dshot600 4IN1 ESC 40A 6S. 2022. Available online: https://www.diatone.us/products/mamba-f40-_bls-mini-dshot600-4in1-esc-40a-6s. (accessed on 31 August 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cube | Prism | Pyramid | Tetrahedron | Side-Tetra. | |
|---|---|---|---|---|---|
| P1 | |||||
| P2 | |||||
| P3 | |||||
| P4 | |||||
| P5 | - | - | |||
| P6 | - | - | - | ||
| P7 | - | - | - | - | |
| P8 | - | - | - | - |
| X & Y PID Gains | , , |
| Z PID Gains | , , |
| Pitch & Roll PID Gains | , , |
| Yaw PID Gains | , , |
| Mixing Gains | , |
| Part | Description | Mass | Num. | Subtotal | % Total |
|---|---|---|---|---|---|
| Envelope | 80 cm diameter foil balloon | 53 g | 1 | 53.0 g | 17.8 |
| Propulsion Unit | Impeller + Motor + Mount | 17 g | 8 | 136.0 g | 45.6 |
| Battery | 2 cell Lithium Polymer [25] | 26 g | 2 | 52.0 g | 17.4 |
| ESC | MAMBA F40 MINI 40A [26] | 8 g | 2 | 16.0 g | 5.4 |
| Flight Control | Custom designed PCB | 7.5 g | 2 | 15.0 g | 5.0 |
| Wires | FPC motor wires | 2 g | 8 | 16.0 g | 5.4 |
| Misc | 3D printed parts | 5 g | 2 | 10.0 g | 3.4 |
| Total | - | - | - | 298.0 g | - |
| Prototype | X (m) | Y (m) | Z (m) | (°) |
|---|---|---|---|---|
| Side-Tetra configuration | 1.0956 | 0.9669 | 0.1255 | 18.3645 |
| Cube configuration | 0.7626 | 0.6836 | 0.0724 | 11.1234 |
| Reduction in error | 30.39% | 29.3% | 42.31% | 39.43% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pheh, Y.H.; Kyi Hla Win, S.; Foong, S. Spherical Indoor Coandă Effect Drone (SpICED): A Spherical Blimp sUAS for Safe Indoor Use. Drones 2022, 6, 260. https://doi.org/10.3390/drones6090260
Pheh YH, Kyi Hla Win S, Foong S. Spherical Indoor Coandă Effect Drone (SpICED): A Spherical Blimp sUAS for Safe Indoor Use. Drones. 2022; 6(9):260. https://doi.org/10.3390/drones6090260
Chicago/Turabian StylePheh, Ying Hong, Shane Kyi Hla Win, and Shaohui Foong. 2022. "Spherical Indoor Coandă Effect Drone (SpICED): A Spherical Blimp sUAS for Safe Indoor Use" Drones 6, no. 9: 260. https://doi.org/10.3390/drones6090260
APA StylePheh, Y. H., Kyi Hla Win, S., & Foong, S. (2022). Spherical Indoor Coandă Effect Drone (SpICED): A Spherical Blimp sUAS for Safe Indoor Use. Drones, 6(9), 260. https://doi.org/10.3390/drones6090260