
Drone-Aided Delivery Methods, Challenge, and the Future: A Methodological Review


Abstract
1. Introduction
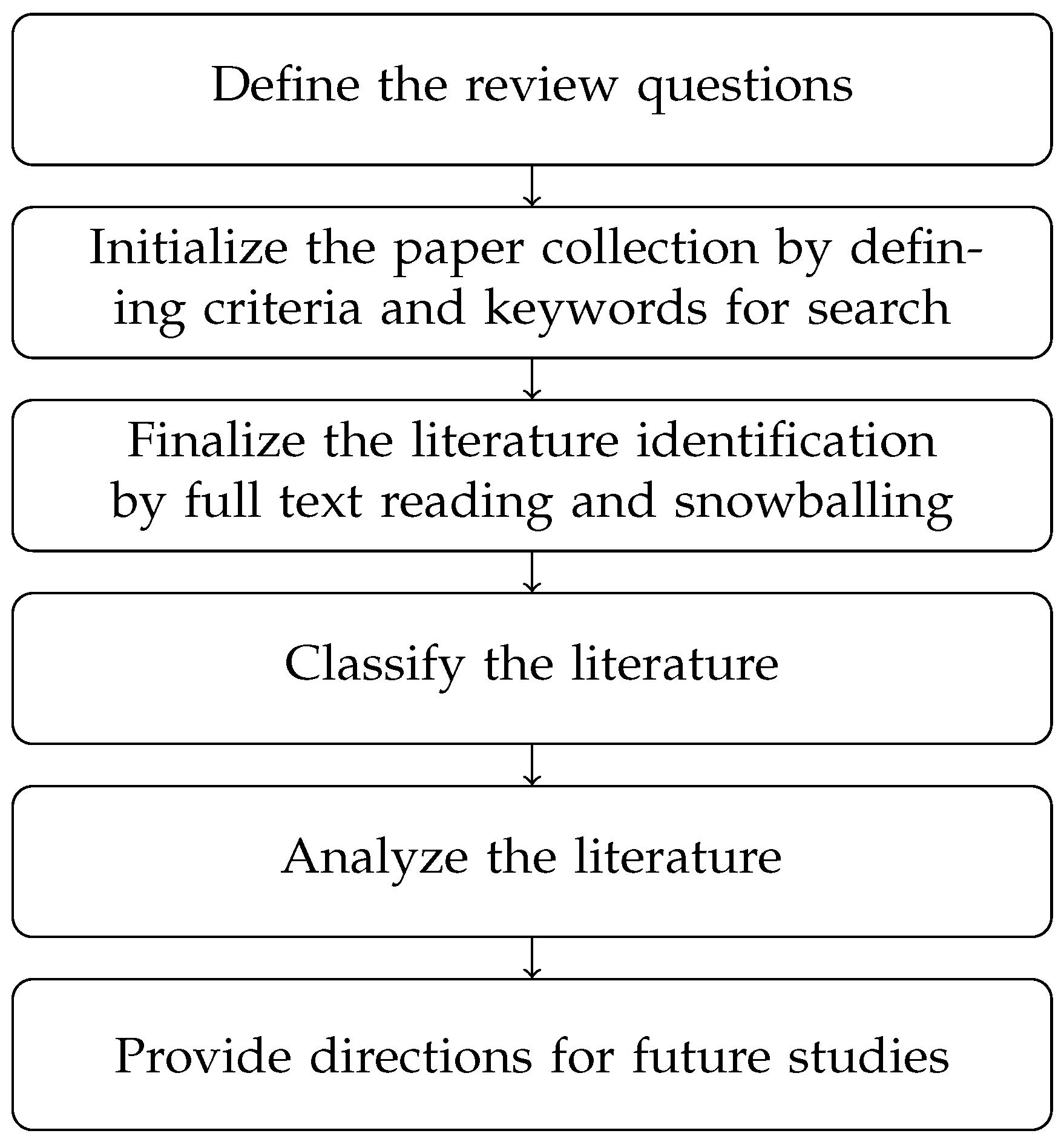
2. Review Methodology
2.1. Research Question Formulation
- What are the research methods used for drone-aided delivery in the existing literature?
- What are the problems or challenges in drone-aided delivery in urban areas and what solutions have been implemented so far?
- What are the possible future research directions for advancing drone-aided delivery?
2.2. Literature Collection
2.3. Literature Selection and Classification
3. Literature Analysis
3.1. Traveling Salesman Problem (TSP)
3.1.1. Exact Method-Based Approach
3.1.2. Heuristics
3.2. Vehicle Routing Problem (VRP)
3.3. Drone Delivery Scheduling Problem (DDSP)
3.4. Drone Optimization Problem (DOP)
3.5. Urban Last Mile Problem
4. Challenges
4.1. Technological
4.2. Social Perception
4.3. Privacy and Safety
4.4. Environmental Concerns
5. Concluding Discussions and Limitations
5.1. Concluding Discussions
5.2. Limitations
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Banaszak, Z. Unmanned aerial vehicle routing problems: A literature review. Appl. Sci. 2020, 10, 4504. [Google Scholar] [CrossRef]
- Rejeb, A.; Rejeb, K.; Simske, S.; Treiblmaier, H. Humanitarian drones: A review and research agenda. Internet Things 2021, 16, 100434. [Google Scholar] [CrossRef]
- Lin, I.C.; Lin, T.H.; Chang, S.H. A decision system for routing problems and rescheduling issues using Unmanned Aerial Vehicles. Appl. Sci. 2022, 12, 6140. [Google Scholar] [CrossRef]
- Almuhaideb, S.; Alhussan, T.; Alamri, S.; Altwaijry, Y.; Aljarbou, L.; Alrayes, H. Optimization of truck-drone parcel delivery using metaheuristics. Appl. Sci. 2021, 11, 6443. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Zahra, Q.u.A.; Khan, M.A.; Alsharif, M.H.; Elhaty, I.A.; Jahid, A. Role of drone technology helping in alleviating the COVID-19 pandemic. Micromachines 2022, 13, 1593. [Google Scholar] [CrossRef]
- Szász, L.; Bálint, C.; Csíki, O.; Nagy, B.Z.; Rácz, B.G.; Csala, D.; Harris, L.C. The impact of COVID-19 on the evolution of online retail: The pandemic as a window of opportunity. J. Retail. Consum. Serv. 2022, 69, 103089. [Google Scholar] [CrossRef]
- Bilinska-Reformat, K.; Dewalska-Opitek, A. E-commerce as the predominant business model of fast fashion retailers in the era of global COVID 19 pandemics. Procedia Comput. Sci. 2021, 192, 2479–2490. [Google Scholar] [CrossRef]
- Raj, A.; Mukherjee, A.A.; de Sousa Jabbour, A.B.L.; Srivastava, S.K. Supply chain management during and post-COVID-19 pandemic: Mitigation strategies and practical lessons learned. J. Bus. Res. 2022, 142, 1125–1139. [Google Scholar] [CrossRef]
- Gupta, A.; Afrin, T.; Scully, E.; Yodo, N. Advances of UAVs toward future transportation: The state-of-the-art, challenges, and opportunities. Future Transp. 2021, 1, 326–350. [Google Scholar] [CrossRef]
- Suguna, M.; Shah, B.; Raj, S.K.; Suresh, M. A study on the influential factors of the last mile delivery projects during COVID-19 era. Oper. Manag. Res. 2021, 15, 399–412. [Google Scholar] [CrossRef]
- Sorooshian, S.; Sharifabad, S.K.; Parsaee, M.; Afshari, A.R. Toward a modern last-mile delivery: Consequences and obstacles of intelligent technology. Appl. Syst. Innov. 2022, 5, 82. [Google Scholar] [CrossRef]
- Merkert, R.; Bliemer, M.C.; Fayyaz, M. Consumer preferences for innovative and traditional last-mile parcel delivery. Int. J. Phys. Distrib. Logist. Manag. 2022, 52, 261–284. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Ayamga, M.; Akaba, S.; Nyaaba, A.A. Multifaceted applicability of drones: A review. Technol. Forecast. Soc. Chang. 2021, 167, 120677. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Beloev, I.H. A review on current and emerging application possibilities for unmanned aerial vehicles. Acta Technol. Agric. 2016, 19, 70–76. [Google Scholar] [CrossRef]
- Merkert, R.; Bushell, J. Managing the drone revolution: A systematic literature review into the current use of airborne drones and future strategic directions for their effective control. J. Air Transp. Manag. 2020, 89, 101929. [Google Scholar] [CrossRef]
- Benarbia, T.; Kyamakya, K. A literature review of drone-based package delivery logistics systems and their implementation feasibility. Sustainability 2022, 14, 360. [Google Scholar] [CrossRef]
- Büyüközkan, G.; Ilıcak, Ö. Smart urban logistics: Literature review and future directions. Socio-Econ. Plan. Sci. 2022, 81, 101197. [Google Scholar] [CrossRef]
- Mohd Noor, N.; Abdullah, A.; Hashim, M. Remote sensing UAV/drones and its applications for urban areas: A review. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012003. [Google Scholar] [CrossRef]
- Kellermann, R.; Biehle, T.; Fischer, L. Drones for parcel and passenger transportation: A literature review. Transp. Res. Interdiscip. Perspect. 2020, 4, 100088. [Google Scholar] [CrossRef]
- Khoufi, I.; Laouiti, A.; Adjih, C. A survey of recent extended variants of the traveling salesman and vehicle routing problems for unmanned aerial vehicles. Drones 2019, 3, 66. [Google Scholar] [CrossRef]
- Chung, S.H.; Sah, B.; Lee, J. Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions. Comput. Oper. Res. 2020, 123, 105004. [Google Scholar] [CrossRef]
- Rojas Viloria, D.; Solano-Charris, E.L.; Muñoz-Villamizar, A.; Montoya-Torres, J.R. Unmanned aerial vehicles/drones in vehicle routing problems: A literature review. Int. Trans. Oper. Res. 2021, 28, 1626–1657. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Winkenbach, M. Applications and research avenues for drone-based models in logistics: A classification and review. Expert Syst. Appl. 2021, 177, 114854. [Google Scholar] [CrossRef]
- Rejeb, A.; Rejeb, K.; Simske, S.J.; Treiblmaier, H. Drones for supply chain management and logistics: A review and research agenda. Int. J. Logist. Res. Appl. 2021, 1–24. [Google Scholar] [CrossRef]
- Macrina, G.; Di Puglia Pugliese, L.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Spasojevic, B.; Lohmann, G.; Scott, N. Air transport and tourism—A systematic literature review (2000–2014). Curr. Issues Tour. 2018, 21, 975–997. [Google Scholar] [CrossRef]
- Tranfield, D.; Denyer, D.; Smart, P. Towards a methodology for developing evidence-informed management knowledge by means of systematic review. Br. J. Manag. 2003, 14, 207–222. [Google Scholar] [CrossRef]
- Jacso, P. The h-index, h-core citation rate and the bibliometric profile of the Scopus database. Online Inf. Rev. 2011, 35, 492–501. [Google Scholar] [CrossRef]
- Yurek, E.E.; Ozmutlu, H.C. A decomposition-based iterative optimization algorithm for traveling salesman problem with drone. Transp. Res. Part C Emerg. Technol. 2018, 91, 249–262. [Google Scholar] [CrossRef]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Cavani, S.; Iori, M.; Roberti, R. Exact methods for the traveling salesman problem with multiple drones. Transp. Res. Part C Emerg. Technol. 2021, 130, 103280. [Google Scholar] [CrossRef]
- Boccia, M.; Masone, A.; Sforza, A.; Sterle, C. An exact approach for a variant of the FS-TSP. Transp. Res. Procedia 2021, 52, 51–58. [Google Scholar] [CrossRef]
- Kim, S.; Moon, I. Traveling salesman problem with a drone station. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 42–52. [Google Scholar] [CrossRef]
- Bouman, P.; Agatz, N.; Schmidt, M. Dynamic programming approaches for the traveling salesman problem with drone. Networks 2018, 72, 528–542. [Google Scholar] [CrossRef]
- Ha, Q.M.; Deville, Y.; Pham, Q.D.; Hà, M.H. On the min-cost traveling salesman problem with drone. Transp. Res. Part C Emerg. Technol. 2018, 86, 597–621. [Google Scholar] [CrossRef]
- Marinelli, M.; Caggiani, L.; Ottomanelli, M.; Dell’Orco, M. En route truck-drone parcel delivery for optimal vehicle routing strategies. IET Intell. Transp. Syst. 2018, 12, 253–261. [Google Scholar] [CrossRef]
- De Freitas, J.C.; Penna, P.H.V. A variable neighborhood search for flying sidekick traveling salesman problem. Int. Trans. Oper. Res. 2019, 27, 267–290. [Google Scholar] [CrossRef]
- Ha, Q.M.; Deville, Y.; Pham, Q.D.; Hà, M.H. A hybrid genetic algorithm for the traveling salesman problem with drone. J. Heuristics 2020, 26, 219–247. [Google Scholar] [CrossRef]
- Kitjacharoenchai, P.; Ventresca, M.; Moshref-Javadi, M.; Lee, S.; Tanchoco, J.M.; Brunese, P.A. Multiple traveling salesman problem with drones: Mathematical model and heuristic approach. Comput. Ind. Eng. 2019, 129, 14–30. [Google Scholar] [CrossRef]
- Raj, R.; Murray, C. The multiple flying sidekicks traveling salesman problem with variable drone speeds. Transp. Res. Part C Emerg. Technol. 2020, 120, 102813. [Google Scholar] [CrossRef]
- Baniasadi, P.; Foumani, M.; Smith-Miles, K.; Ejov, V. A transformation technique for the clustered generalized traveling salesman problem with applications to logistics. Eur. J. Oper. Res. 2020, 285, 444–457. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Matheuristic algorithms for the parallel drone scheduling traveling salesman problem. Ann. Oper. Res. 2020, 289, 211–226. [Google Scholar] [CrossRef]
- Mathew, N.; Smith, S.L.; Waslander, S.L. Planning paths for package delivery in heterogeneous multirobot teams. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1298–1308. [Google Scholar] [CrossRef]
- Saleu, R.G.M.; Deroussi, L.; Feillet, D.; Grangeon, N.; Quilliot, A. The parallel drone scheduling problem with multiple drones and vehicles. Eur. J. Oper. Res. 2022, 300, 571–589. [Google Scholar] [CrossRef]
- Sacramento, D.; Pisinger, D.; Ropke, S. An adaptive large neighborhood search metaheuristic for the vehicle routing problem with drones. Transp. Res. Part C Emerg. Technol. 2019, 102, 289–315. [Google Scholar] [CrossRef]
- Huang, S.H.; Huang, Y.H.; Blazquez, C.A.; Chen, C.Y. Solving the vehicle routing problem with drone for delivery services using an ant colony optimization algorithm. Adv. Eng. Inform. 2022, 51, 101536. [Google Scholar] [CrossRef]
- Lin, M.; Lyu, J.Y.; Gao, J.J.; Li, L.Y. Model and hybrid algorithm of collaborative distribution system with multiple drones and a truck. Sci. Program. 2020, 2020, 8887057. [Google Scholar] [CrossRef]
- Daknama, R.; Kraus, E. Vehicle Routing with Drones. arXiv 2017, arXiv:1705.06431. [Google Scholar]
- Pugliese, L.D.P.; Guerriero, F.; Macrina, G. Using drones for parcels delivery process. Procedia Manuf. 2020, 42, 488–497. [Google Scholar] [CrossRef]
- Othman, M.S.B.; Shurbevski, A.; Karuno, Y.; Nagamochi, H. Routing of carrier-vehicle systems with dedicated last-stretch delivery vehicle and fixed carrier route. J. Inf. Process. 2017, 25, 655–666. [Google Scholar] [CrossRef]
- Ulmer, M.W.; Thomas, B.W. Same-day delivery with heterogeneous fleets of drones and vehicles. Networks 2018, 72, 475–505. [Google Scholar] [CrossRef]
- Chang, Y.S.; Lee, H.J. Optimal delivery routing with wider drone-delivery areas along a shorter truck-route. Expert Syst. Appl. 2018, 104, 307–317. [Google Scholar] [CrossRef]
- Wang, X.; Poikonen, S.; Golden, B. The vehicle routing problem with drones: Several worst-case results. Optim. Lett. 2017, 11, 679–697. [Google Scholar] [CrossRef]
- Luo, Z.; Liu, Z.; Shi, J. A two-echelon cooperated routing problem for a ground vehicle and its carried unmanned aerial vehicle. Sensors 2017, 17, 1144. [Google Scholar] [CrossRef]
- Tamke, F.; Buscher, U. A branch-and-cut algorithm for the vehicle routing problem with drones. Transp. Res. Part B Methodol. 2021, 144, 174–203. [Google Scholar] [CrossRef]
- Xia, Y.; Zeng, W.; Xing, X.; Zhan, Y.; Tan, K.H.; Kumar, A. Joint optimisation of drone routing and battery wear for sustainable supply chain development: A mixed-integer programming model based on blockchain-enabled fleet sharing. Ann. Oper. Res. 2021, 1–39. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Zbigniew, B. Planning deliveries with UAV routing under weather forecast and energy consumption constraints. IFAC-PapersOnLine 2019, 52, 820–825. [Google Scholar] [CrossRef]
- Zhu, X.; Yan, R.; Peng, R.; Zhang, Z. Optimal routing, loading and aborting of UAVs executing both visiting tasks and transportation tasks. Reliab. Eng. Syst. Saf. 2020, 204, 107132. [Google Scholar] [CrossRef]
- Cheng, C.; Adulyasak, Y.; Rousseau, L.M. Drone routing with energy function: Formulation and exact algorithm. Transp. Res. Part B Methodol. 2020, 139, 364–387. [Google Scholar] [CrossRef]
- Choudhury, S.; Solovey, K.; Kochenderfer, M.J.; Pavone, M. Efficient large-scale multi-drone delivery using transit networks. J. Artif. Intell. Res. 2021, 70, 757–788. [Google Scholar] [CrossRef]
- Yuan, X.; Zhu, J.; Li, Y.; Huang, H.; Wu, M. An enhanced genetic algorithm for unmanned aerial vehicle logistics scheduling. IET Commun. 2021, 15, 1402–1411. [Google Scholar] [CrossRef]
- Li, Y.; Yuan, X.; Zhu, J.; Huang, H.; Wu, M. Multi-objective scheduling of logistics UAVs based on simulated annealing. Commun. Comput. Inf. Sci. 2020, 1163, 287–298. [Google Scholar] [CrossRef]
- Kim, J.; Moon, H.; Jung, H. Drone-based parcel delivery using the rooftops of city buildings: Model and solution. Appl. Sci. 2020, 10, 4362. [Google Scholar] [CrossRef]
- Tavana, M.; Khalili-Damghani, K.; Santos-Arteaga, F.J.; Zandi, M.H. Drone shipping versus truck delivery in a cross-docking system with multiple fleets and products. Expert Syst. Appl. 2017, 72, 93–107. [Google Scholar] [CrossRef]
- Hazama, Y.; Iima, H.; Karuno, Y.; Mishima, K. Genetic algorithm for scheduling of parcel delivery by drones. J. Adv. Mech. Des. Syst. Manuf. 2021, 15, 1–12. [Google Scholar] [CrossRef]
- Peng, K.; Du, J.; Lu, F.; Sun, Q.; Dong, Y.; Zhou, P.; Hu, M. A hybrid genetic algorithm on routing and scheduling for vehicle-assisted multi-drone parcel delivery. IEEE Access 2019, 7, 49191–49200. [Google Scholar] [CrossRef]
- Lei, D.; Chen, X. An improved variable neighborhood search for parallel drone scheduling traveling salesman problem. Appl. Soft Comput. 2022, 127, 109416. [Google Scholar] [CrossRef]
- Boysen, N.; Briskorn, D.; Fedtke, S.; Schwerdfeger, S. Drone delivery from trucks: Drone scheduling for given truck routes. Networks 2018, 72, 506–527. [Google Scholar] [CrossRef]
- Torabbeigi, M.; Lim, G.J.; Kim, S.J. Drone delivery schedule optimization considering the reliability of drones. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems, ICUAS 2018, Dallas, TX, USA, 12–15 June 2018; pp. 1048–1053. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Huang, C. Scheduling of a parcel delivery system consisting of an aerial drone interacting with public transportation vehicles. Sensors 2020, 20, 2045. [Google Scholar] [CrossRef] [PubMed]
- Hassija, V.; Saxena, V.; Chamola, V. Scheduling drone charging for multi-drone network based on consensus time-stamp and game theory. Comput. Commun. 2020, 149, 51–61. [Google Scholar] [CrossRef]
- Betti Sorbelli, F.; Corò, F.; Das, S.K.; Palazzetti, L.; Pinotti, C.M. On the scheduling of conflictual deliveries in a last-mile delivery scenario with truck-carried drones. Pervasive Mob. Comput. 2022, 87, 101700. [Google Scholar] [CrossRef]
- Shin, M.; Kim, J.; Levorato, M. Auction-based charging scheduling with deep learning framework for multi-drone networks. IEEE Trans. Veh. Technol. 2019, 68, 4235–4248. [Google Scholar] [CrossRef]
- Torabbeigi, M.; Lim, G.J.; Kim, S.J. Drone delivery scheduling optimization considering payload-induced battery consumption rates. J. Intell. Robot. Syst. 2020, 97, 471–487. [Google Scholar] [CrossRef]
- Salama, M.; Srinivas, S. Joint optimization of customer location clustering and drone-based routing for last-mile deliveries. Transp. Res. Part C Emerg. Technol. 2020, 114, 620–642. [Google Scholar] [CrossRef]
- Dukkanci, O.; Kara, B.Y.; Bektaş, T. Minimizing energy and cost in range-limited drone deliveries with speed optimization. Transp. Res. Part C Emerg. Technol. 2021, 125, 102985. [Google Scholar] [CrossRef]
- Shavarani, S.M.; Nejad, M.G.; Rismanchian, F.; Izbirak, G. Application of hierarchical facility location problem for optimization of a drone delivery system: A case study of Amazon prime air in the city of San Francisco. Int. J. Adv. Manuf. Technol. 2018, 95, 3141–3153. [Google Scholar] [CrossRef]
- Chiang, W.C.; Li, Y.; Shang, J.; Urban, T.L. Impact of drone delivery on sustainability and cost: Realizing the UAV potential through vehicle routing optimization. Appl. Energy 2019, 242, 1164–1175. [Google Scholar] [CrossRef]
- Shi, Y.; Lin, Y.; Li, B.; Li, R.Y.M. A bi-objective optimization model for the medical supplies’ simultaneous pickup and delivery with drones. Comput. Ind. Eng. 2022, 171, 108389. [Google Scholar] [CrossRef]
- Khoufi, I.; Laouiti, A.; Adjih, C.; Hadded, M. UAV trajectory optimization for data pick up and delivery with time windows. Drones 2021, 5, 27. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, S.; Xu, W.; Wang, W. A novel multi-objective optimization model for the vehicle routing problem with drone delivery and dynamic flight endurance. Comput. Ind. Eng. 2022, 173, 108679. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 70–85. [Google Scholar] [CrossRef]
- Sajid, M.; Mittal, H.; Pare, S.; Prasad, M. Routing and scheduling optimization for UAV assisted delivery system: A hybrid approach. Appl. Soft Comput. 2022, 126, 109225. [Google Scholar] [CrossRef]
- Sawadsitang, S.; Niyato, D.; Tan, P.S.; Wang, P. Joint ground and aerial package delivery services: A stochastic optimization approach. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2241–2254. [Google Scholar] [CrossRef]
- Tadić, S.; Kovač, M.; Čokorilo, O. The application of drones in city logistics concepts. Promet-Traffic Transp. 2021, 33, 451–462. [Google Scholar] [CrossRef]
- Gabani, P.R.; Gala, U.B.; Narwane, V.S.; Raut, R.D.; Govindarajan, U.H.; Narkhede, B.E. A viability study using conceptual models for last mile drone logistics operations in populated urban cities of India. IET Collab. Intell. Manuf. 2021, 3, 262–272. [Google Scholar] [CrossRef]
- Serrano-Hernandez, A.; Ballano, A.; Faulin, J. Selecting freight transportation modes in last-mile urban distribution in pamplona (Spain): An option for drone delivery in smart cities. Energies 2021, 14, 4748. [Google Scholar] [CrossRef]
- Çetin, E.; Cano, A.; Deransy, R.; Tres, S.; Barrado, C. Implementing mitigations for improving societal acceptance of urban air mobility. Drones 2022, 6, 28. [Google Scholar] [CrossRef]
- Borghetti, F.; Caballini, C.; Carboni, A.; Grossato, G.; Maja, R.; Barabino, B. The use of drones for last-Mile delivery: A numerical case study in Milan, Italy. Sustainability 2022, 14, 1766. [Google Scholar] [CrossRef]
- Doole, M.; Ellerbroek, J.; Hoekstra, J. Estimation of traffic density from drone-based delivery in very low level urban airspace. J. Air Transp. Manag. 2020, 88, 101862. [Google Scholar] [CrossRef]
- Ren, X.; Cheng, C. Model of third-party risk index for unmanned aerial vehicle delivery in urban environment. Sustainability 2020, 12, 8318. [Google Scholar] [CrossRef]
- Doole, M.; Ellerbroek, J.; Hoekstra, J.M. Investigation of merge assist policies to improve safety of drone traffic in a constrained urban airspace. Aerospace 2022, 9, 120. [Google Scholar] [CrossRef]
- Çetin Kaya, Y.; Kaya, M.; Akdağ, A. Determining optimal route for medication delivery of COVID-19 patients with drone. Gazi Univ. J. Sci. Part C Des. Technol. 2021, 9, 478–491. [Google Scholar] [CrossRef]
- Ariante, G.; Ponte, S.; Papa, U.; Greco, A.; Core, G.D. Ground control system for UAS safe landing area determination (SLAD) in urban air mobility operations. Sensors 2022, 22, 3226. [Google Scholar] [CrossRef] [PubMed]
- Zang, X.; Jiang, L.; Liang, C.; Dong, J.; Lu, W.; Mladenovic, N. Optimization approaches for the urban delivery problem with trucks and drones. Swarm Evol. Comput. 2022, 75, 101147. [Google Scholar] [CrossRef]
- Resat, H.G. Design and analysis of novel hybrid multi-objective optimization approach for data-driven sustainable delivery systems. IEEE Access 2020, 8, 90280–90293. [Google Scholar] [CrossRef]
- Brunner, G.; Szebedy, B.; Tanner, S.; Wattenhofer, R. The urban last mile problem: Autonomous drone delivery to your balcony. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems, ICUAS 2019, Atlanta, GA, USA, 11–14 June 2019; pp. 1005–1012. [Google Scholar] [CrossRef]
- Bahabry, A.; Wan, X.; Ghazzai, H.; Menouar, H.; Vesonder, G.; Massoud, Y. Low-altitude navigation for multi-rotor drones in urban areas. IEEE Access 2019, 7, 87716–87731. [Google Scholar] [CrossRef]
- Mayalu, A.; Kochersberger, K.; Jenkins, B.; Malassenet, F. Lidar data reduction for unmanned systems navigation in urban Canyon. Remote. Sens. 2020, 12, 1724. [Google Scholar] [CrossRef]
- Li, A.; Hansen, M.; Zou, B. Traffic management and resource allocation for UAV-based parcel delivery in low-altitude urban space. Transp. Res. Part C Emerg. Technol. 2022, 143, 103808. [Google Scholar] [CrossRef]
- Kuru, K. Planning the future of smart cities with swarms of fully autonomous unmanned aerial vehicles using a novel framework. IEEE Access 2021, 9, 6571–6595. [Google Scholar] [CrossRef]
- Kirschstein, T. Energy demand of parcel delivery services with a mixed fleet of electric vehicles. Clean. Eng. Technol. 2021, 5, 100322. [Google Scholar] [CrossRef]
- Aiello, G.; Inguanta, R.; D’Angelo, G.; Venticinque, M. Energy consumption model of aerial urban logistic infrastructures. Energies 2021, 14, 5998. [Google Scholar] [CrossRef]
- Hong, I.; Kuby, M.; Murray, A.T. A range-restricted recharging station coverage model for drone delivery service planning. Transp. Res. Part C Emerg. Technol. 2018, 90, 198–212. [Google Scholar] [CrossRef]
- Buko, J.; Bulsa, M.; Makowski, A. Spatial premises and key conditions for the use of UAVs for delivery of items on the example of the polish courier and postal services market. Energies 2022, 15, 1403. [Google Scholar] [CrossRef]
- Sah, B.; Gupta, R.; Bani-Hani, D. Analysis of barriers to implement drone logistics. Int. J. Logist. Res. Appl. 2021, 24, 531–550. [Google Scholar] [CrossRef]
- Cohen, A.P.; Shaheen, S.A.; Farrar, E.M. Urban air mobility: History, ecosystem, market potential, and challenges. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6074–6087. [Google Scholar] [CrossRef]
- Yoo, W.; Yu, E.; Jung, J. Drone delivery: Factors affecting the public’s attitude and intention to adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- Kwon, D.; Son, S.; Park, Y.; Kim, H.; Park, Y.; Lee, S.; Jeon, Y. Design of secure handover authentication scheme for urban air mobility environments. IEEE Access 2022, 10, 42529–42541. [Google Scholar] [CrossRef]
- Jaller, M.; Otero-Palencia, C.; Pahwa, A. Automation, electrification, and shared mobility in urban freight: Opportunities and challenges. Transp. Res. Procedia 2020, 46, 13–20. [Google Scholar] [CrossRef]
- Han, P.; Yang, X.; Zhao, Y.; Guan, X.; Wang, S. Quantitative ground risk assessment for urban logistical unmanned aerial vehicle (UAV) based on bayesian network. Sustainability 2022, 14, 5733. [Google Scholar] [CrossRef]
- Anbaroğlu, B. Parcel delivery in an urban environment using unmanned aerial systems: A vision paper. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, 4, 73–79. [Google Scholar] [CrossRef]
- Finn, R.L.; Wright, D. Unmanned aircraft systems: Surveillance, ethics and privacy in civil applications. Comput. Law Secur. Rev. 2012, 28, 184–194. [Google Scholar] [CrossRef]
- Pedersen, C.B.; Rosenkrands, K.; Sung, I.; Nielsen, P. Systemic performance analysis on zoning for unmanned aerial vehicle-based service delivery. Drones 2022, 6, 157. [Google Scholar] [CrossRef]
- Ahmed, S.S.; Hulme, K.F.; Fountas, G.; Eker, U.; Benedyk, I.V.; Still, S.E.; Anastasopoulos, P.C. The flying car—challenges and strategies toward future adoption. Front. Built Environ. 2020, 6, 1–11. [Google Scholar] [CrossRef]
- Park, H.J.; Mirjalili, R.; Côté, M.J.; Lim, G.J. Scheduling diagnostic testing kit deliveries with the mothership and drone routing problem. J. Intell. Robot. Syst. Theory Appl. 2022, 105, 38. [Google Scholar] [CrossRef] [PubMed]
- Kapoor, R.; Kloet, N.; Gardi, A.; Mohamed, A.; Sabatini, R. Sound propagation modelling for manned and unmanned aircraft noise assessment and mitigation: A review. Atmosphere 2021, 12, 1424. [Google Scholar] [CrossRef]
- Torija, A.J.; Clark, C. A psychoacoustic approach to building knowledge about human response to noise of unmanned aerial vehicles. Int. J. Environ. Res. Public Health 2021, 18, 682. [Google Scholar] [CrossRef]
- Stolaroff, J.K.; Samaras, C.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Energy use and life cycle greenhouse gas emissions of drones for commercial package delivery. Nat. Commun. 2018, 9, 409. [Google Scholar] [CrossRef]
- Torija, A.J.; Li, Z.; Self, R.H. Effects of a hovering unmanned aerial vehicle on urban soundscapes perception. Transp. Res. Part D Transp. Environ. 2020, 78, 102195. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Approach | Future Directions |
|---|---|---|
| Yurek and Ozmutlu [31] | • Iterative decomposition approach based on MIP formulation and three synchronizations’ constraints | • Clustered and hybrid algorithms |
| Dell’Amico et al. [44] | • No truck sync and VRP generalization | • Larger instances of heuristics |
| Marinelli et al. [38] | • Lin Kernighan heuristic, the inclusion of en-route operations | • Dynamic simulation with en route and congested arcs |
| Saleu et al. [46] | • Giant initial tour and hybrid meta-heuristics • Improvement steps and MILP formulation | • Exact solution branch-and-price • Constraint Programming framework |
| Kitjacharoenchai et al. [41] | • Two-phase heuristic and adaptive insertion algorithm, initial multiple TSP • Genetic algorithm, combined k-means/nearest neighbor, random cluster/tour | • Adaptive large neighborhood search • Simulated annealing mimetic algorithm |
| Baniasadi et al. [43] | • IP formulation of clustered generalized TSP (CGTSP), transformed CGTSP and heuristics LKH and CE | • Fine tuning TSP heuristics • Delivery nodes clustering |
| de Freitas and Penna [39] | • Optimal TSP solution through a MIP solution, implementation of the general variable neighborhood search (meta-heuristic) | • MILP formulation • Multiple delivery trucks and drones |
| Ha et al. [37] | • Implementation of a min-cost TSP objective • MILP model; GRASP and split-based TSP | • Meta-heuristics • Multiple vehicles and multiple drones |
| Mathew et al. [45] | • TSP: LKH suboptimal solutions, noon-bean transformation • LKH heuristic | • Simultaneous deliveries and drone capacity greater than 1 |
| Boccia et al. [34] | • MILP and ILP formulation • Path-based formulation for vehicle sync | • Operational constraints and algorithmic refinements |
| Murray and Chu [32] | • Flying Sidekick TSP (IP, Heuristic: savings, nearest neighbor, sweep) • Parallel Drone TSP: (IP, Heuristic: savings, nearest neighbor) | • Sophisticated local search, simulated annealing, and Tabu search |
| Raj and Murray [42] | • Tour partition • UAVs’ sorties, scheduled activities, and local search algorithm | • Heuristics, multi-track problems, and en-route operations |
| Lin et al. [3] | • GA for the global optimal solution | • Multiple rush requests and volume costs |
| Kim and Moon [35] | • TSP drone station and MIP model separation in TSP multiple stations | • Multiple drones’ station |
| Cavani et al. [33] | • MILP formulation, decomposition approach, and branch-and-cut algorithm | • Multiple trucks, en-route operations, and uncertainty |
| Ha et al. [40] | • Hybrid genetic algorithm with dynamic population management and adaptive diversity control based on a split algorithm | • Multiple trucks and drones |
| Almuhaideb et al. [4] | • Greedy randomized adaptive search, two local search alternatives, and a self-adaptive neighborhood | • Neighborhood search alternatives |
| Bouman et al. [36] | • Bellman–Held–Karp dynamic programming and shortest path enumeration | • Multi-drone operations and any point departure |
| Author | Approach | Future Directions |
|---|---|---|
| Daknama and Kraus [50] | • Graph theory • Two nested local search algorithms • Local search and outer local search | • Consider adding to the model packing time, time windows, charging the battery, and other constraints • Consider a variation of the model with drone landing in moving vehicles |
| Othman et al. [52] | • Graph theory • Theoretical • Polynomial-time approximation algorithm | • Improve the approximation ratio of the algorithm • Evaluate the impact of a different metric • Include the delivery by both vehicles |
| Pugliese et al. [51] | • Graph theory | • Consider uncertainties regarding delivery resources’ utilization |
| Thibbotuwawa et al. [59] | • Graph theory • Decomposition method and depth-first search strategy | • Take multi-depots and battery recharging stations into account • Examine options for increasing the flight’s range • Assess the minimization of energy consumption in the model |
| Zhu et al. [60] | • Graph theory • Monte Carlo simulation • Tabu search algorithm | • Calculate the drone’s optimal initial freight |
| Cheng et al. [61] | • Graph theory • Two nested local search algorithms • Local search and outer local search | • Consider adding to the model packing time, time windows, charging the battery, and other constraints • Consider the landing of drones on vehicles in motion |
| Chang and Lee [54] | • Graph theory • K-means clustering technique • TSP • Nonlinear programming and shift-weights • Simulation | • Consider constraints regarding the time window required for each delivery |
| Sacramento et al. [47] | • MIP • Meta-heuristic • Adaptive Large Neighborhood Search | • Include other logistics costs • Consider a routing dynamic approximation caused by demand and time windows • Take into account multi-drones and their interactions with trucks • Examine optimal solution approaches (e.g., Dantzig–Wolfe decomposition) |
| Huang et al. [48] | • MIP • ACO • Neighborhood Search | • Evaluate costs’ differences within VRPD and VRP for small instances • Consider variability caused by demand and drone technology • Consider the problem with multi-drones and multi-trucks, as well as the assignation’s exchange |
| Lin et al. [49] | • MIP • h-GA • h-PSO | • Include time windows constraints • Include uncertain conditions • Evaluate other algorithms and involve a simulation approach for the synergistic dist path prob |
| Xia et al. [58] | • MIP • Branch-and-price algorithm | • Consider the payload effect in the blockchain-enabled fleet-sharing platform • Acknowledge demand uncertainty to include empty drones’ repositioning |
| Tamke and Buscher [57] | • MILP | • Consider drone’s specifications as new constraints • Consider alternating the objective function to a total cost minimization to try other algorithms |
| Wang et al. [55] | • Worst case analysis • Theoretical | • Evaluate other heuristics and exact algorithm approaches to solving the formulation • Recognize how the algorithm performs in real-life settings |
| Luo et al. [56] | • IP • Heuristic through GA | • Consider time windows’ constraints • Evaluate the performance of heuristics and exact algorithms within the problem |
| Ulmer and Thomas [53] | • Stochastic modeling • Approximate dynamic programming | • Consider the replacement of the global parameter for state-dependent parameters |
| Choudhury et al. [62] | • Stochastic modeling • Approximate dynamic programming | • Estimation of the operational costs • Consider uncertainties caused by the ground vehicle network |
| Author | Approach | Future Directions |
|---|---|---|
| Yuan et al. [63] | • MILP • GA with weight line-based loading method | • Consider objectives other than task completion time for evaluating the scheduling algorithm |
| Hazama et al. [67] | • MILP • GA considering single parcel | • Extend the problem from one drone to multiple drones |
| Peng et al. [68] | • MILP • GA considering multiple parcels | • Adapt the model to similar planning and scheduling problems |
| Li et al. [64] | • MILP • Extended VNS algorithm | • Incorporate more multivariate heuristic algorithms, edge computing scenarios, practical drone volume, and energy consumption models |
| Lei and Chen [69] | • MILP • Adaptive reduced VNS algorithm with shaking method | • Consider environmental implications • Extend the problem by adding multiple trucks and/or drones |
| Kim et al. [65] | • MILP • Block-stacking-based heuristic | • Consider uncertainties, i.e., weather conditions, and battery consumption • Apply other metaheuristics |
| Boysen et al. [70] | • MIP • Simulated Annealing | • Solve the problem holistically to determine truck routes |
| Tavana et al. [66] | • MIP • Epsilon-constraint method | • Add criteria like earliness shipping • Consider multi-periods, dynamic situations, and allocation–scheduling–routing altogether • Use meta-heuristic methods |
| Torabbeigi et al. [71] | • Two-stage stochastic model • ELOD calculation algorithm | • Introduce uncertainty in the travel time • Apply other probability distributions for drone failure function |
| Torabbeigi et al. [76] | • MILP • Variable pre-possessing algorithm | • Include factors such as flight speed and environmental conditions |
| Huang et al. [72] | • Dynamic programming based • Exact algorithm | • Introduce more complex public transportation network • Expand the delivery area • Incorporate uncertainty |
| Hassija et al. [73] | • Double Auctioning model • Iterative auction-based and hash graph consensus algorithm | • Apply different algorithms to solve the problem |
| Betti Sorbelli et al. [74] | • Integer Linear Programming (ILP) model • Pseudo-polynomial time optimal algorithm and approximation algorithm | • Extend the problem to multi-depot multi-truck multi-delivery scenario • Incorporate late and canceled deliveries, and rescheduling deliveries during flight time |
| Shin et al. [75] | • Auction-based model • Deep learning algorithm | • Formulate the problem with a multi-item auction • Consider advanced auction mechanism design |
| Author | Approach | Future Directions |
|---|---|---|
| Salama and Srinivas [77] | • MILP • Epsilon constraint method • Iterative k-means algorithm | • Consider solving large instances using other heuristics or meta-heuristics |
| Dukkanci et al. [78] | • Second-order cone programming • Exact methods | • Account truck speeds • Extend the model to humanitarian applications |
| Shavarani et al. [79] | • Mixed integer non-linear programming model • GA and hybrid GA | • Consider improved drone payload in capacitated models • Address uncertainties by fuzzy programming approaches • Assess environmental sustainability |
| Chiang et al. [80] | • MIP • GA | • Consider other power sources such as fuel cells |
| Shi et al. [81] | • MIP • Modified NSGA-II | • Combine underground logistics system with ground transportation |
| Khoufi et al. [82] | • MIP • NSGA-II | • Optimize the refueling operations management • Make the refueling time proportional to required energy of drone |
| Zhang et al. [83] | • Mixed-integer model • Bi- and tri-evel heuristics | • Incorporate time windows and theory of multi-level heuristic algorithms |
| Dorling et al. [84] | • MILP • Simulated annealing heuristic | • Consider the impact of weather • Add time windows to locations • Include maintenance cost in case of drone reuse determination |
| Xia et al. [58] | • MILP • Tailored branch-and-price algorithm | • Consider the effects of different drone payloads • Incorporate empty drone repositioning with fleet sharing |
| Sawadsitang et al. [86] | • Three-stage stochastic IP model • Decomposition method | • Consider the uncertainty in customers’ demand and traveling time • Incorporate multiple-stage scenarios |
| Author | Approach | Future Directions |
|---|---|---|
| Tadic et al. [87] | • CL conceptual models • Performance evaluation through test instance generation | • Develop a financial risk assessment for the parts involved • Consider the CL concepts in a dynamic and stochastic environment • Consider other CL concepts and combinations • Generate new models oriented to the implementation of more complex CL concepts with drones |
| Gabani et al. [88] | • Conceptual models • Case scenarios | • Consider stakeholders’ impact on the framework implementation • Expand the framework to the computational simulation • Consider implementation feasibility and profitability |
| Serrano-Hernandez et al. [89] | • Statistical • Survey and multi-criteria analysis (AHP) | • Include more stakeholders in the analysis (carriers, owners, and local authorities) |
| Doole et al. [92] | • Statistical • Estimation framework and forecasting • Case study | • Expand financial assessment, including factors such as drone’s landing area and charging station |
| Borghetti et al. [91] | • Statistical • Stated Preference (SP) survey • Multinomial logit model Numerical case study, financial feasibility analysis | • Consider legal regulations and limitations in the drone’s route planning • Explore landing strategies for dense urban areas • Include battery performance and its impact in the drone’s performance • Explore end-user recognition • Use of multi-criteria analysis to recognize the environmental impact of drone’s use |
| Çetin et al. [90] | • Statistical • Survey, brainstorming, and safety operational risk assessment | • Implement the proposed mitigations • Expand the techniques to measure and recollect data for the list’s improvement |
| Doole et al. [94] | • Time–space diagram • Speed-based and delay-based algorithms Simulation | • Include other real factors such as meteorological events • Consider drone’s flight information to avoid false recognition • Enhance the street network to be non-orthogonal |
| Ren and Cheng [93] | • Pixel regression mode • Risk assessment index model | • Explore verification techniques for real-life applications of the model • Include other drones’ internal (endurance) and external factors (weather and airspace) |
| Ariante et al. [96] | • 2D LiDAR-based Ground System | • Enhance the mechanical structure • Improve the calibration strategy |
| Zang et al. [97] | • MIP • Bi-level and three-level programming | • Include time window • Consider multi-level heuristic algorithm to solve the problem |
| Resat [98] | • MILP • MCDM | • Include drone’s characteristics as models’ constraints • Consider sensitivity analysis to recognize the parameters that influence the sustainability scores |
| Bahabry et al. [100] | • MILP • Two heuristics algorithms | • Consider research approaches that can enhance solutions for real-time cases (e.g., artificial intelligence) • Consider the inclusion of a ground transit network to help the drone’s energy endurance |
| Mayalu et al. [101] | • 3D-Mapping • 3D-Tiles navigation format • Robot Operating System (ROS) | • Expand trajectory planning for drone traffic management applications |
| Li et al. [102] | • Deterministic clustering-based path planning • Saturated Fast-Marching Square (Saturated FM2) algorithm • MILP, linearization • Batch optimization algorithm | • Expand the use of other heuristics approaches to solve the model formulation • Incorporate stochastic factors • Recognize the effect of population density, building concentration, and terrain types on the model’s performance |
| Brunner et al. [99] | • GPS-based navigation • ROS, PX4, Ardupilot • Vision-based localization algorithms and simulation | • Include collision avoidance in the model with data retrieval • Add building scan detection to detect the landing field • Expand the study to incorporate package handling |
| Kuru [103] | • Decentralized agent-based control architecture • Simulation | • Develop regulations to frame the FAUAVs operations in SCs • Improve the communication technology with the FAUAVs and SCs • Consider other options for interference management and jamming avoidance techniques • Include sky pollution reduction within the UAV route planning |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Tupayachi, J.; Sharmin, A.; Martinez Ferguson, M. Drone-Aided Delivery Methods, Challenge, and the Future: A Methodological Review. Drones 2023, 7, 191. https://doi.org/10.3390/drones7030191
Li X, Tupayachi J, Sharmin A, Martinez Ferguson M. Drone-Aided Delivery Methods, Challenge, and the Future: A Methodological Review. Drones. 2023; 7(3):191. https://doi.org/10.3390/drones7030191
Chicago/Turabian StyleLi, Xueping, Jose Tupayachi, Aliza Sharmin, and Madelaine Martinez Ferguson. 2023. "Drone-Aided Delivery Methods, Challenge, and the Future: A Methodological Review" Drones 7, no. 3: 191. https://doi.org/10.3390/drones7030191
APA StyleLi, X., Tupayachi, J., Sharmin, A., & Martinez Ferguson, M. (2023). Drone-Aided Delivery Methods, Challenge, and the Future: A Methodological Review. Drones, 7(3), 191. https://doi.org/10.3390/drones7030191