
Real-Time Positioning Method for UAVs in Complex Structural Health Monitoring Scenarios

Abstract
1. Introduction
2. Methods
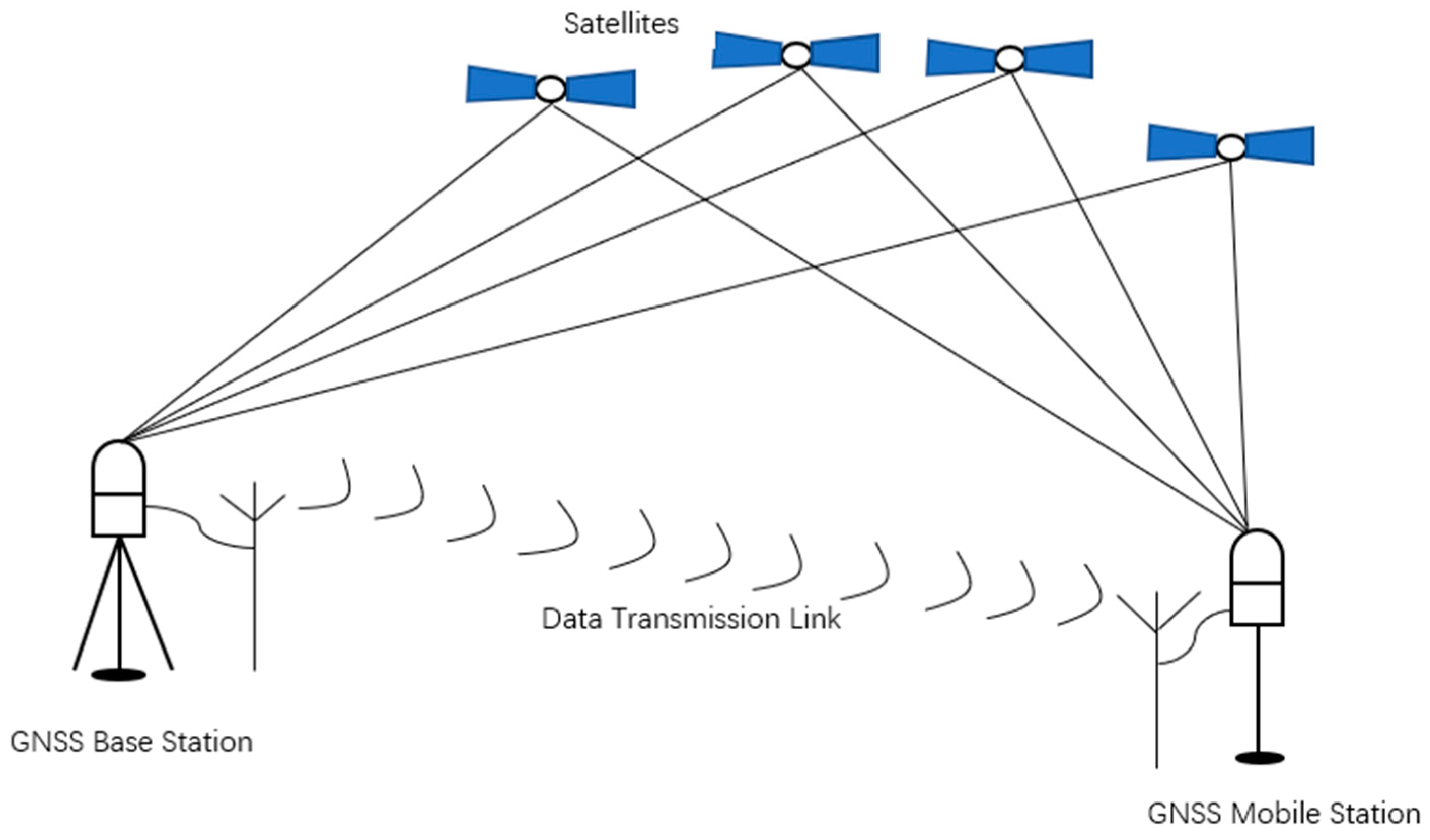
2.1. Real-Time Kinematic Positioning
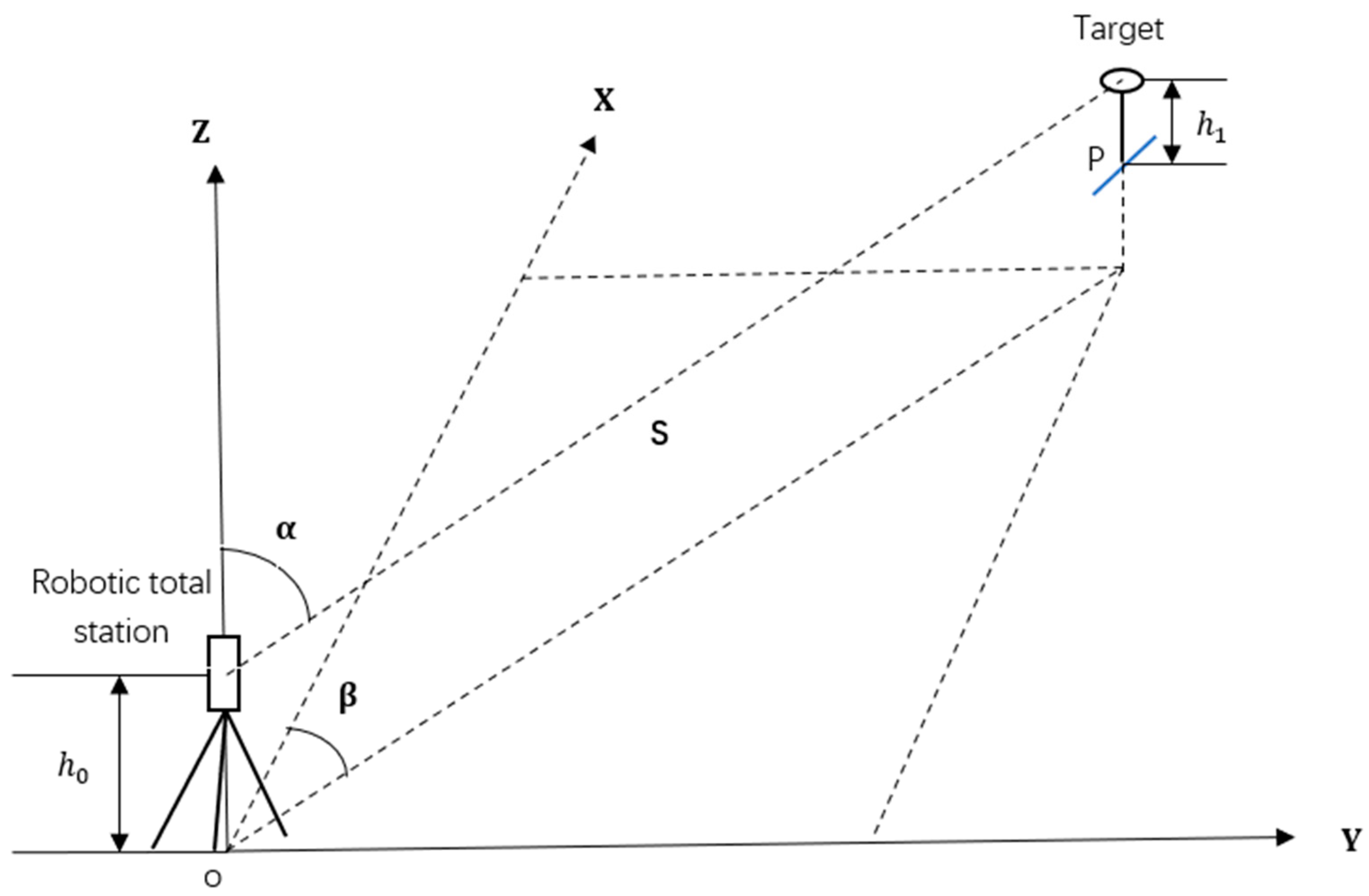
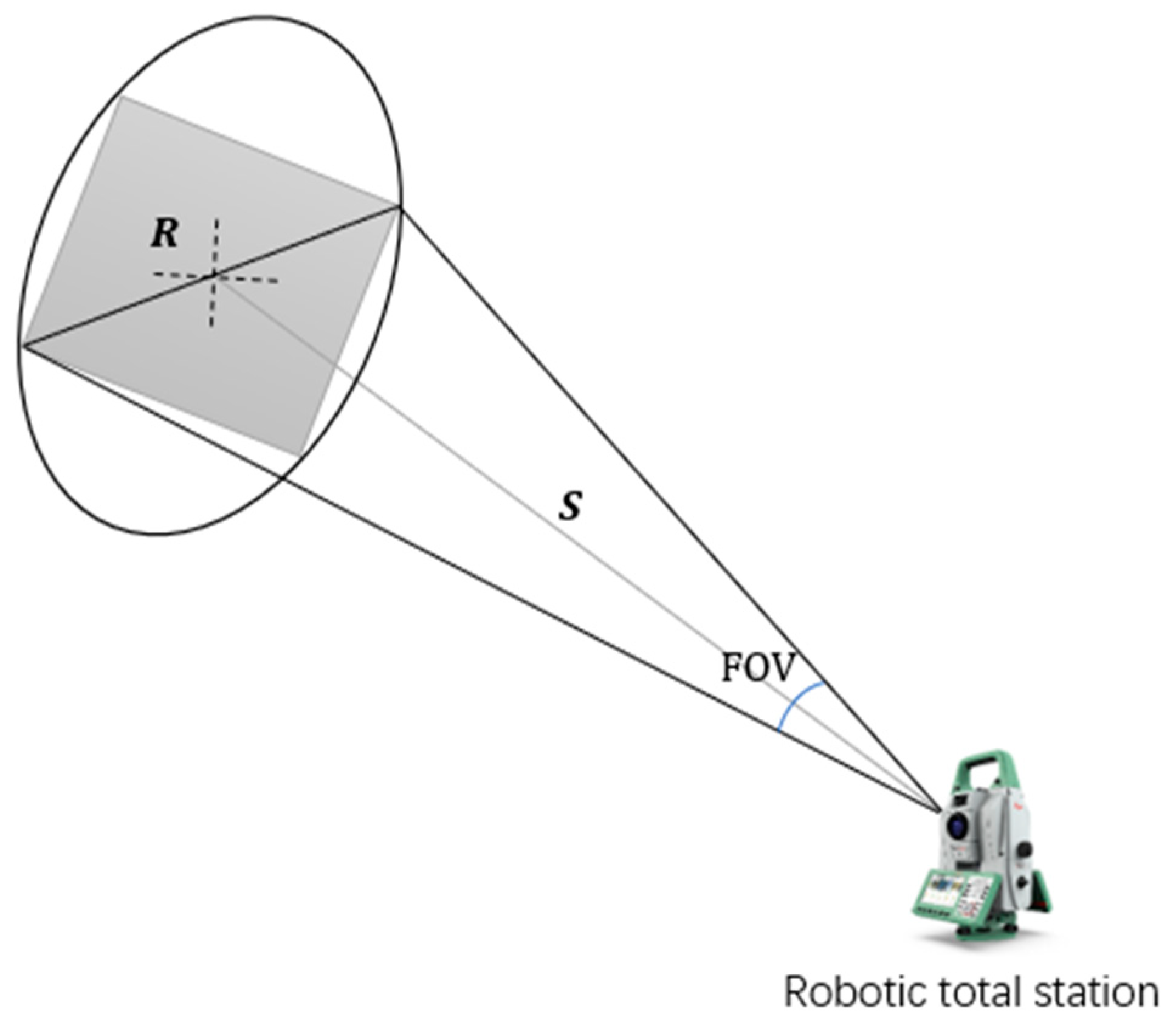
2.2. Total Station Based Positioning
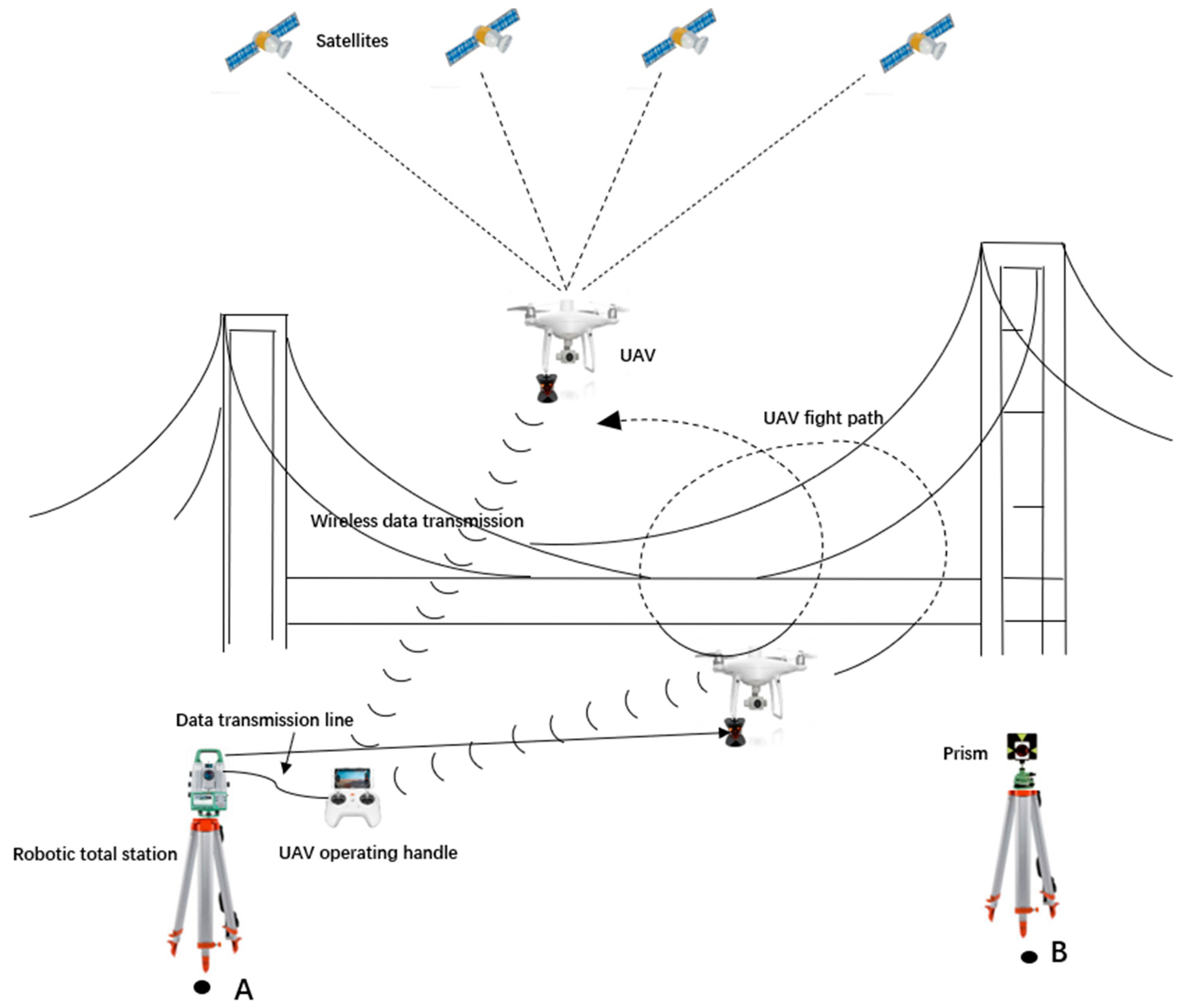
2.3. Real-Time Positioning for UAV
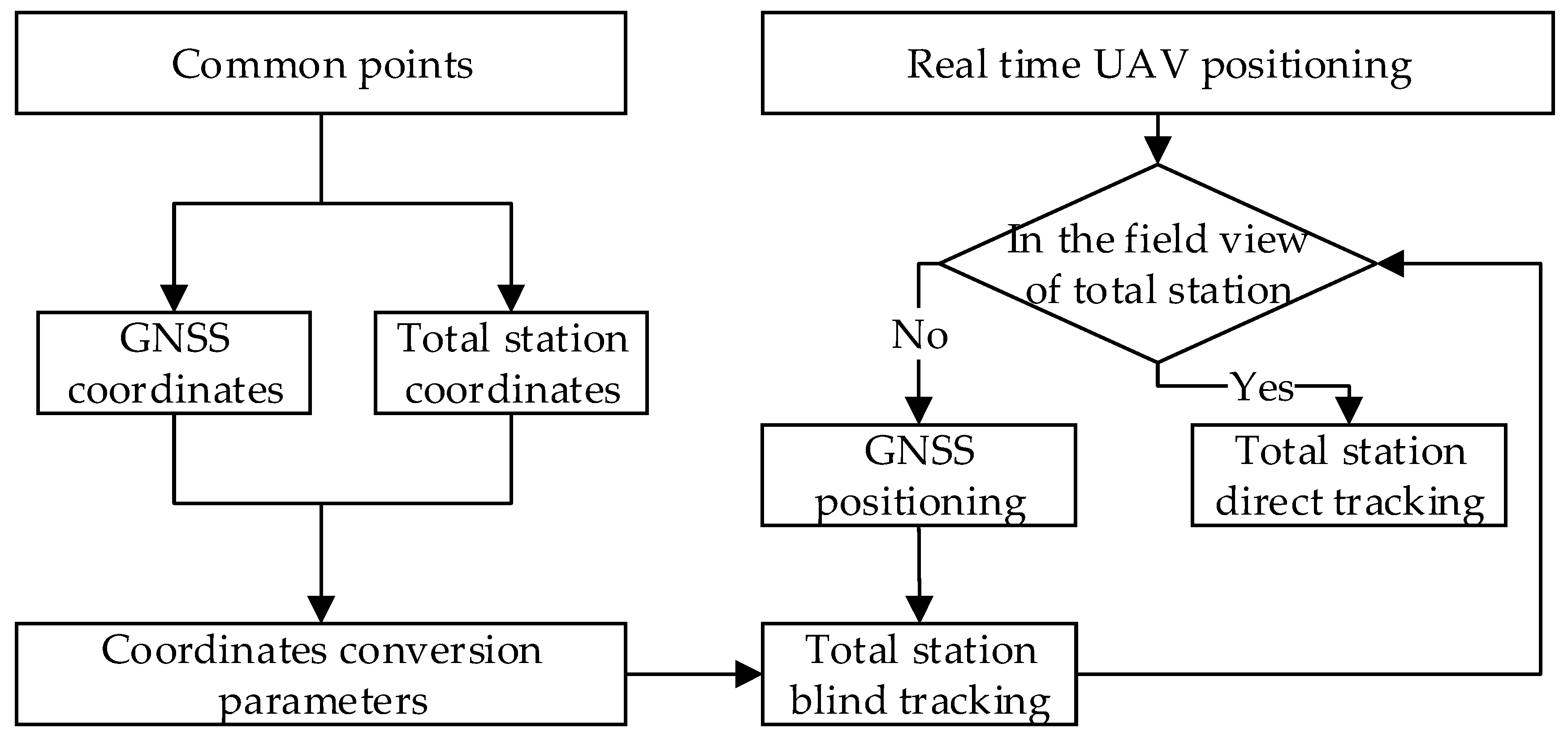
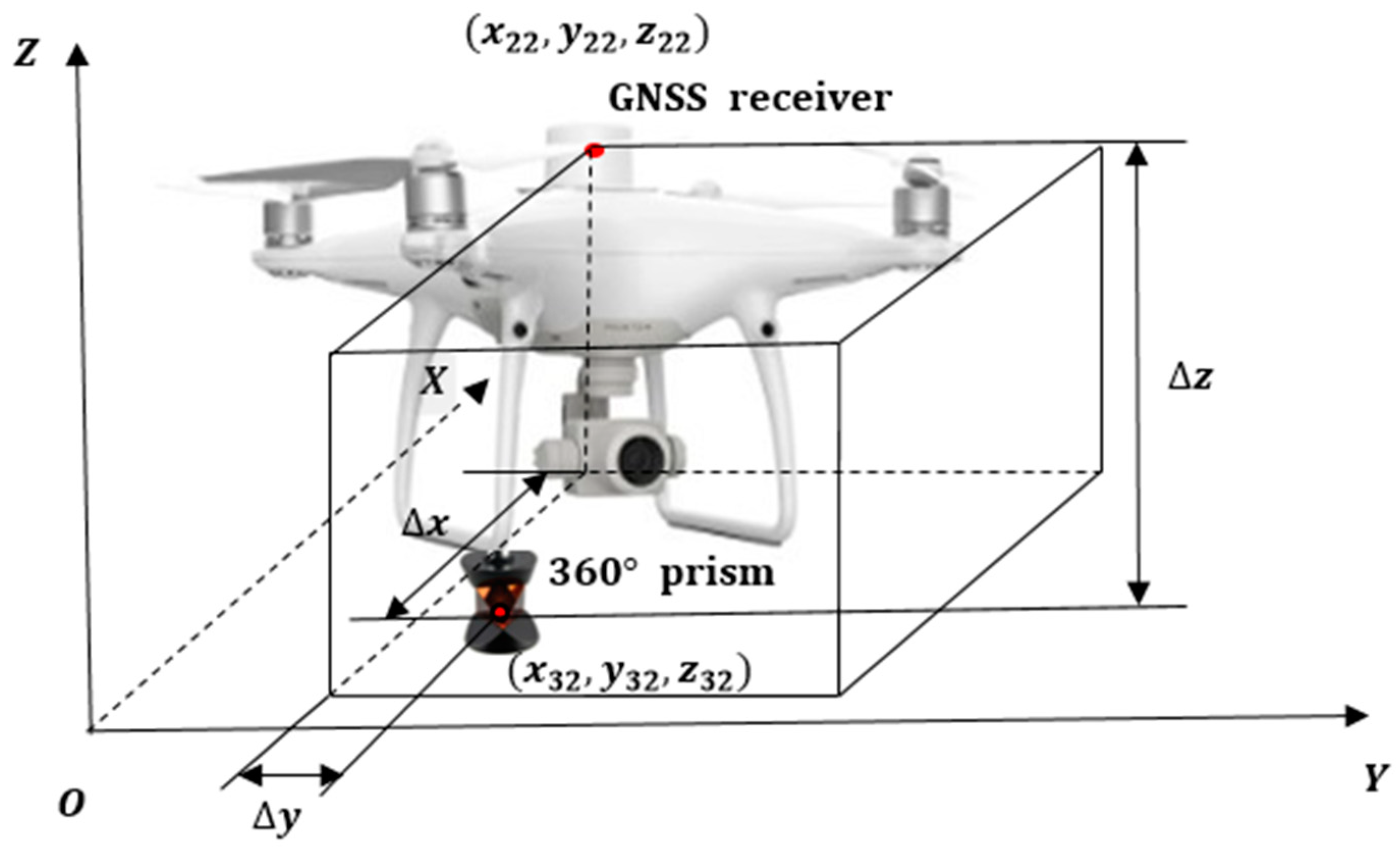
2.3.1. Conversion between Different Coordinate Systems
2.3.2. System Requirements
2.3.3. Blind Tracking
2.3.4. Direct Tracking
2.3.5. UAV Positioning Mode
- (a)
- Alternate positioning
- (b)
- Optimal positioning
- (c)
- Post-positioning
3. Results and Discussions
3.1. Experimental Equipment
3.2. Positioning Performance Test
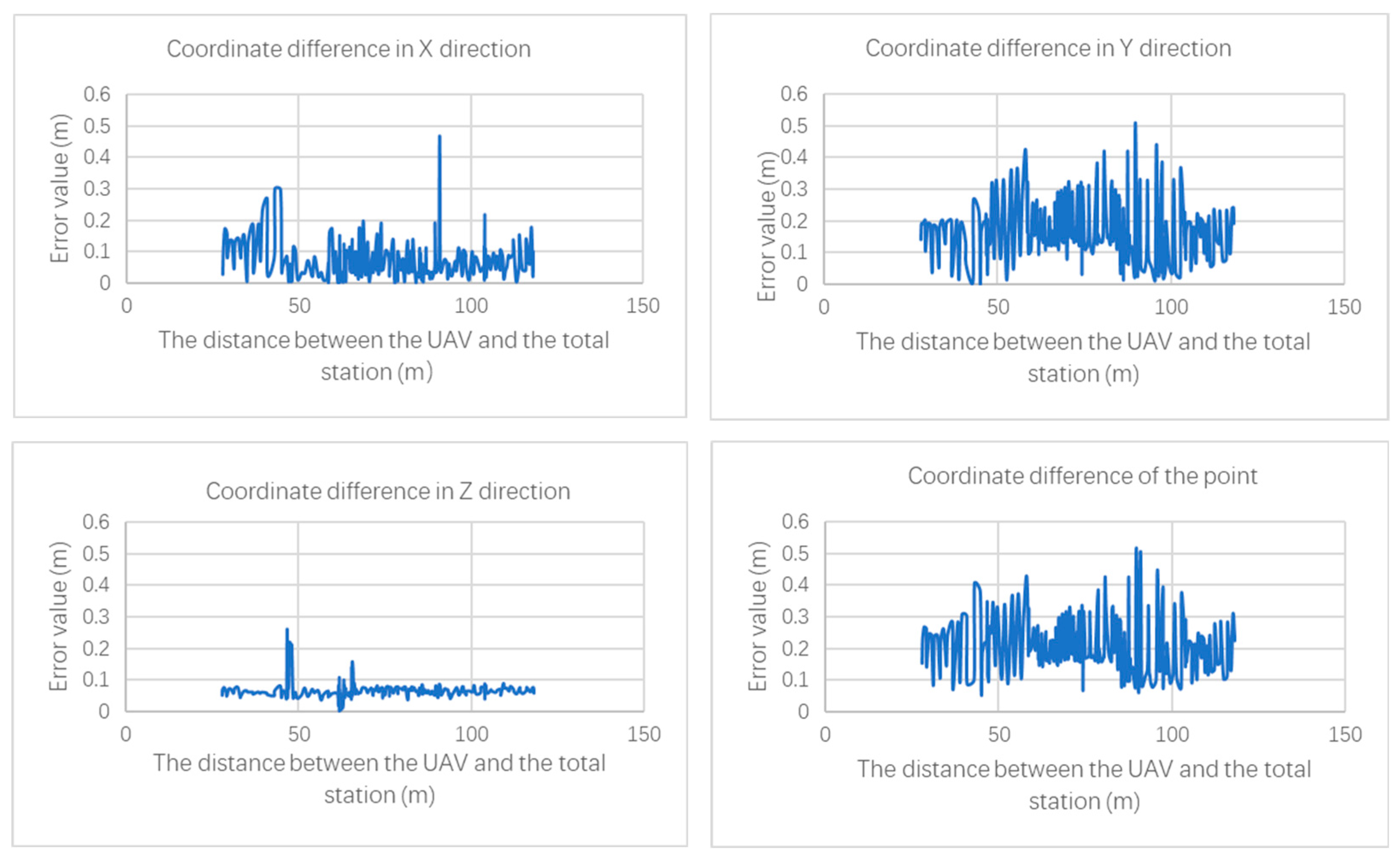
3.3. Accuracy Analysis of the Coordinates Conversion
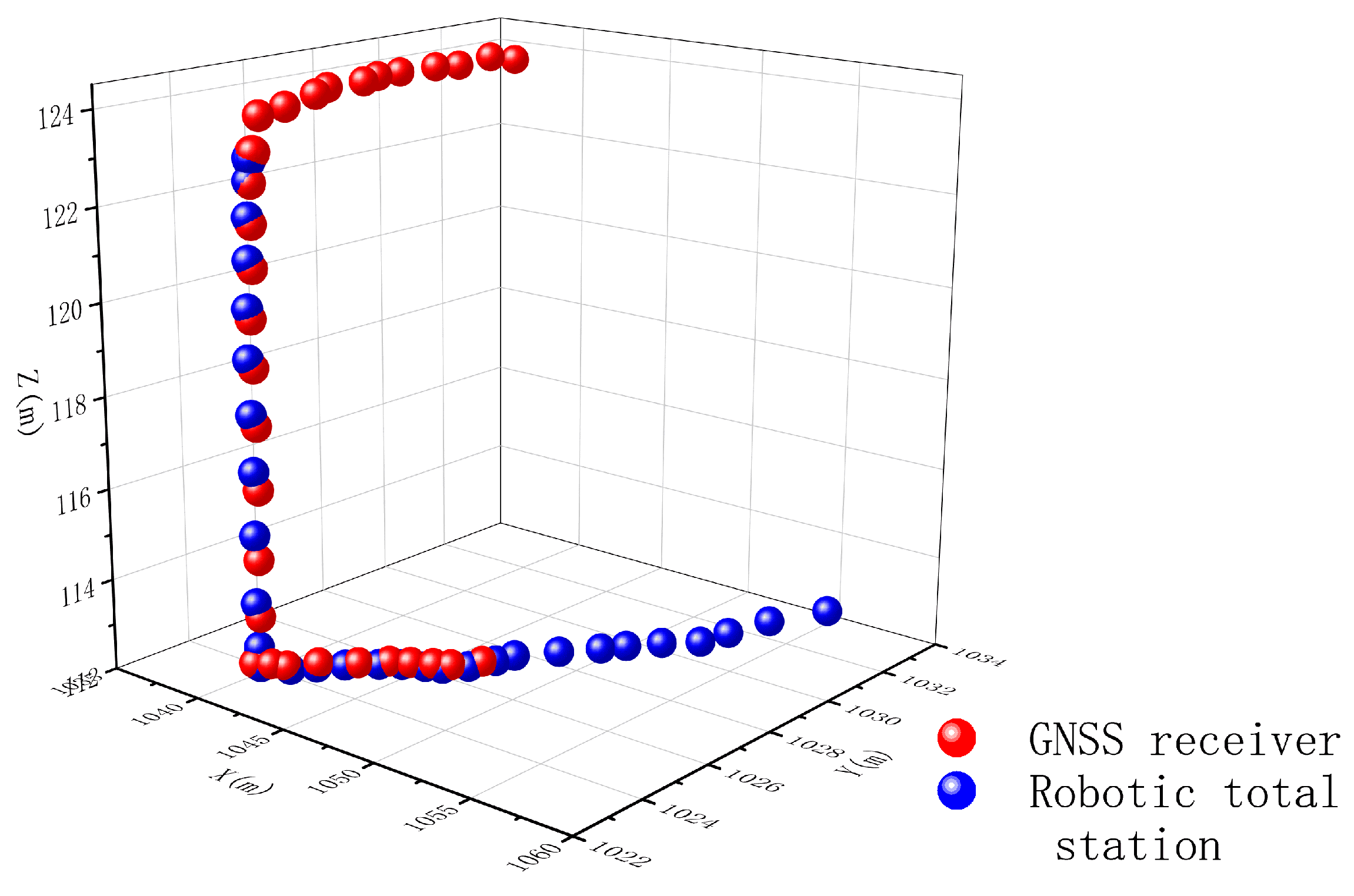
3.4. Field Test
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Habtour, E.M.; Cole, D.P.; Kube, C.M.; Henry, T.C.; Haynes, R.A.; Gardea, F.; San, T.; Tinga, T. Structural state awareness through integration of global dynamic and local material behavior. J. Intell. Mater. Syst. Struct. 2019, 30, 1045389X1982848. [Google Scholar] [CrossRef]
- Masciotta, M.G.; Ramos, L.F.; Lourenco, P.B. The importance of structural monitoring as a diagnosis and control tool in the restoration process of heritage structures: A case study in Portugal. J. Cult. Herit. 2017, 27, 36–47. [Google Scholar] [CrossRef]
- Limongelli, M.P.; Previtali, M.; Cantini, L.; Carosio, S.; Matos, J.C.; Isoird, J.M.; Wenzel, H.; Pellegrino, C. Lifecycle management, monitoring and assessment for safe large-scale infrastructures: Challenges and needs. Int. Arch. Photogram Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W11, 727–734. [Google Scholar] [CrossRef]
- Zhou, Q.; Ding, S.; Qing, G.; Hu, J. UAV vision detection method for crane surface cracks based on Faster R-CNN and image segmentation. J. Civ. Struct. Health Monit. 2022, 12, 845–855. [Google Scholar] [CrossRef]
- Kang, D.; Cha, Y.J. Autonomous UAVs for structural health monitoring using deep learning and an ultrasonic beacon system with geo-tagging. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 885–902. [Google Scholar] [CrossRef]
- Padró, J.-C.; Muñoz, F.-J.; Planas, J.; Pons, X. Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 130–140. [Google Scholar] [CrossRef]
- Kyriou, A.; Nikolakopoulos, K.; Koukouvelas, I.; Lampropoulou, P. Repeated UAV campaigns, GNSS measurements, GIS, and petrographic analyses for landslide mapping and monitoring. Minerals 2021, 11, 300. [Google Scholar] [CrossRef]
- Gül, Y.; Hastaoğlu, K.Ö.; Poyraz, F. Using the GNSS method assisted with UAV photogrammetry to monitor and determine deformations of a dump site of three open-pit marble mines in Eliktekke region, Amasya province, Turkey. Environ. Earth Sci. 2020, 79, 1–20. [Google Scholar] [CrossRef]
- Imam, R.; Pini, M.; Marucco, G.; Dominici, F.; Dovis, F. UAV-based GNSS-R for water detection as a support to flood monitoring operations: A feasibility study. Appl. Sci. 2019, 10, 210. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y. Constrained ESKF for UAV positioning in indoor corridor environment based on IMU and WiFi. Sensors 2022, 22, 391. [Google Scholar] [CrossRef]
- Nie, W.; Han, Z.-C.; Zhou, M.; Xie, L.-B.; Jiang, Q. UAV detection and identification based on WiFi signal and RF fingerprint. IEEE Sens. J. 2021, 21, 13540–13550. [Google Scholar] [CrossRef]
- Li, Z.; Yin, D.; Xiang, X.; Tang, D.; Zhang, C.; Zhang, S. Research on relative positioning system of UAVs Swarm based on distributed UWB. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 5561–5566. [Google Scholar]
- Li, K.; Wang, C.; Huang, S.; Liang, G.; Wu, X.; Liao, Y. Self-positioning for UAV indoor navigation based on 3D laser scanner, UWB and INS. In Proceedings of the 2016 IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016; pp. 498–503. [Google Scholar]
- Muja, M.; Lowe, D.G. Scalable nearest neighbor algorithms for high dimensional data. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 2227–2240. [Google Scholar] [CrossRef]
- Tiemann, J.; Schweikowski, F.; Wietfeld, C. Design of an UWB indoor-positioning system for UAV navigation in GNSS-denied environments. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–7. [Google Scholar]
- Guanglei, M.; Haibing, P. The application of ultrasonic sensor in the obstacle avoidance of quad-rotor UAV. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 976–981. [Google Scholar]
- Altan, A.; Bayraktar, K.; Hacıoğlu, R. Simultaneous localization and mapping of mines with unmanned aerial vehicle. In Proceedings of the 2016 24th Signal Processing and Communication Application Conference (SIU), Zonguldak, Turkey, 16–19 May 2016; pp. 1433–1436. [Google Scholar]
- Han, Q.; Liu, X.; Xu, J. Detection and location of steel structure surface cracks based on unmanned aerial vehicle images. J. Build. Eng. 2022, 50, 104098. [Google Scholar] [CrossRef]
- Son, S.W.; Kim, D.W.; Sung, W.G.; Yu, J.J. Integrating UAV and TLS Approaches for Environmental Management: A Case Study of a Waste Stockpile Area. Remote Sens. 2020, 12, 1615. [Google Scholar] [CrossRef]
- Mustafah, Y.M.; Azman, A.W.; Akbar, F. Indoor UAV positioning using stereo vision sensor. Procedia Eng. 2012, 41, 575–579. [Google Scholar] [CrossRef]
- Saranya, K.; Naidu, V.; Singhal, V.; Tanuja, B. Application of vision based techniques for UAV position estimation. In Proceedings of the 2016 International Conference on Research Advances in Integrated Navigation Systems (RAINS), Bangalore, India, 6–7 May 2016; pp. 1–5. [Google Scholar]
- Jingjing, W.; De, G.; Fei, L. Research on autonomous positioning method of UAV based on binocular vision. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 3588–3593. [Google Scholar]
- Li, W.; Fu, Z. Unmanned aerial vehicle positioning based on multi-sensor information fusion. Geo-Spat. Inf. Sci. 2018, 21, 302–310. [Google Scholar] [CrossRef]
- Zhou, J.; Xiao, H.; Jiang, W.; Bai, W.; Liu, G. Automatic subway tunnel displacement monitoring using robotic total station. Measurement 2020, 151, 107251. [Google Scholar] [CrossRef]
- Zhou, J.; Luo, C.; Jiang, W.; Yu, X.; Wang, P. Using UAVs and robotic total stations in determining height differences when crossing obstacles. Measurement 2022, 188, 110372. [Google Scholar] [CrossRef]
- Cwiakala, P. Testing Procedure of Unmanned Aerial Vehicles (UAVs) Trajectory in Automatic Missions. Appl. Sci.-Basel 2019, 9, 3488. [Google Scholar] [CrossRef]
- Paraforos, D.S.; Reutemann, M.; Sharipov, G.; Werner, R.; Griepentrog, H.W. Total station data assessment using an industrial robotic arm for dynamic 3D in-field positioning with sub-centimetre accuracy. Comput. Electron. Agric. 2017, 136, 166–175. [Google Scholar] [CrossRef]
- Ishii, A.; Yasuno, T.; Amakata, M.; Sugawara, H.; Fujii, J.; Ozasa, K. Autonomous UAV flight using the Total Station Navigation System in Non-GNSS Environments. In Proceedings of the International Symposium on Automation and Robotics in Construction, Kitakyushu, Japan, 27–28 October 2020; Volume 37, pp. 685–692. [Google Scholar]
- Benjumea, D.; Alcántara, A.; Ramos, A.; Torres-Gonzalez, A.; Sánchez-Cuevas, P.; Capitan, J.; Heredia, G.; Ollero, A. Localization System for Lightweight Unmanned Aerial Vehicles in Inspection Tasks. Sensors 2021, 21, 5937. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robotic Total Station | ||
|---|---|---|
| Model | TS60 | |
| Angle measurement accuracy | Hz, V | 0.5″ |
| Ranging accuracy | single/continuous | 0.6 mm + 1 ppm/3 mm + 1.5 ppm |
| Lock and tracking range | 360° Prism (GRZ4, GRZ122) | 1000 m |
| UAV | ||
| Model | DJI Phantom 4RTK | |
| Positioning features | Frequency Used: GPS: L1/L2; GLONASS: L1/L2; BeiDou: B1/B2; Galileo*: E1/E5 | |
| First-Fixed Time: <50 s | ||
| Positioning Accuracy: Vertical 1.5 cm + 1 ppm (RMS);Horizontal 1 cm + 1 ppm (RMS). | ||
| Velocity Accuracy: 0.03 m/s | ||
| Positioning Method | The Total Station | GNSS Receiver | ||||
|---|---|---|---|---|---|---|
| UAV Status | x (m) | y (m) | z (m) | x (m) | y (m) | z (m) |
| Hovering | 0.053 | 0.040 | 0.023 | 0.077 | 0.033 | 0.03 |
| Vertical flight | 0.061 | 0.053 | 0.067 | 0.056 | ||
| Horizontal flight | 0.035 | 0.04 | ||||
| Groups | Points Combination | Max-X (m) | Max-Y (m) | Max-Z (m) | Max-P (m) | SD-X (m) | SD-Y (m) | SD-Z (m) | SD-P (m) |
|---|---|---|---|---|---|---|---|---|---|
| 5 common points | 12345 | 0.467 | 0.507 | 0.261 | 0.515 | 0.058 | 0.087 | 0.027 | 0.082 |
| 4 common points | 1234 | 0.454 | 0.516 | 0.261 | 0.523 | 0.058 | 0.087 | 0.027 | 0.083 |
| 1235 | 0.490 | 0.511 | 0.261 | 0.527 | 0.060 | 0.086 | 0.027 | 0.080 | |
| 1245 | 0.464 | 0.491 | 0.261 | 0.498 | 0.058 | 0.086 | 0.027 | 0.081 | |
| 1345 | 0.458 | 0.504 | 0.261 | 0.512 | 0.059 | 0.086 | 0.027 | 0.081 | |
| 2345 | 0.472 | 0.523 | 0.261 | 0.531 | 0.057 | 0.089 | 0.027 | 0.085 | |
| 3 common points | 123 | 0.484 | 0.524 | 0.261 | 0.533 | 0.060 | 0.087 | 0.027 | 0.081 |
| 124 | 0.439 | 0.496 | 0.261 | 0.503 | 0.061 | 0.086 | 0.027 | 0.082 | |
| 125 | 0.498 | 0.489 | 0.261 | 0.528 | 0.060 | 0.085 | 0.027 | 0.079 | |
| 135 | 0.489 | 0.504 | 0.261 | 0.524 | 0.060 | 0.085 | 0.027 | 0.079 | |
| 134 | 0.438 | 0.515 | 0.261 | 0.521 | 0.061 | 0.087 | 0.027 | 0.083 | |
| 145 | 0.435 | 0.485 | 0.261 | 0.492 | 0.061 | 0.084 | 0.027 | 0.080 | |
| 234 | 0.453 | 0.546 | 0.261 | 0.553 | 0.059 | 0.092 | 0.027 | 0.089 | |
| 235 | 0.498 | 0.517 | 0.261 | 0.537 | 0.061 | 0.086 | 0.027 | 0.080 | |
| 245 | 0.469 | 0.502 | 0.261 | 0.510 | 0.058 | 0.089 | 0.027 | 0.084 | |
| 345 | 0.482 | 0.544 | 0.261 | 0.552 | 0.058 | 0.092 | 0.027 | 0.088 | |
| 2 common points | 12 | 0.480 | 0.503 | 0.261 | 0.515 | 0.059 | 0.086 | 0.027 | 0.080 |
| 13 | 0.482 | 0.520 | 0.261 | 0.529 | 0.060 | 0.087 | 0.027 | 0.081 | |
| 14 | 0.365 | 0.492 | 0.261 | 0.503 | 0.066 | 0.083 | 0.027 | 0.080 | |
| 15 | 0.524 | 0.467 | 0.261 | 0.546 | 0.063 | 0.083 | 0.027 | 0.078 | |
| 23 | 0.498 | 0.538 | 0.261 | 0.549 | 0.061 | 0.088 | 0.027 | 0.082 | |
| 24 | 0.431 | 0.517 | 0.261 | 0.523 | 0.061 | 0.091 | 0.027 | 0.087 | |
| 25 | 0.503 | 0.497 | 0.261 | 0.535 | 0.060 | 0.085 | 0.027 | 0.079 | |
| 34 | 0.503 | 0.741 | 0.261 | 0.745 | 0.070 | 0.114 | 0.027 | 0.110 | |
| 35 | 0.493 | 0.492 | 0.261 | 0.524 | 0.086 | 0.097 | 0.029 | 0.079 | |
| 45 | 0.472 | 0.514 | 0.261 | 0.522 | 0.058 | 0.091 | 0.027 | 0.086 |
| GNSS Receiver Coordinates | Total Station Coordinates | |||||
|---|---|---|---|---|---|---|
| x (m) | y (m) | z (m) | x (m) | y (m) | z (m) | |
| TS01 | 3,373,382.54 | 529,031.0448 | 8.55 | 1000 | 1000 | 100 |
| TS02 | 3,373,393.436 | 529,102.4147 | 7.63 | 1021.309 | 1068.933 | 99.21636 |
| Conversion parameters | ||||||
| GNSS Receiver | Total Station | Coordinate Difference | |||||
|---|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) | (m) | |
| Above the building | 1041.000 | 1023.600 | 124.000 | ||||
| 1040.346 | 1024.623 | 124.000 | |||||
| 1040.000 | 1025.635 | 124.100 | |||||
| 1039.223 | 1026.352 | 124.100 | |||||
| 1038.457 | 1027.784 | 124.000 | |||||
| 1037.956 | 1028.458 | 124.000 | |||||
| 1037.105 | 1029.575 | 123.900 | |||||
| 1038.144 | 1030.144 | 124.000 | |||||
| 1038.630 | 1030.624 | 124.000 | |||||
| 1038.953 | 1031.463 | 124.100 | |||||
| 1039.431 | 1031.997 | 124.000 | |||||
| Around the building | 1041.286 | 1023.279 | 123.328 | 1041.205 | 1023.266 | 123.190 | 0.160 |
| 1041.311 | 1023.300 | 123.308 | 1041.073 | 1023.275 | 123.164 | 0.279 | |
| 1041.159 | 1023.319 | 123.288 | 1041.015 | 1023.294 | 123.176 | 0.184 | |
| 1041.126 | 1023.329 | 123.318 | 1040.994 | 1023.301 | 123.196 | 0.182 | |
| 1041.113 | 1023.335 | 123.328 | 1041.028 | 1023.325 | 123.203 | 0.152 | |
| 1041.164 | 1023.367 | 123.328 | 1041.028 | 1023.365 | 123.183 | 0.199 | |
| 1041.139 | 1023.410 | 123.298 | 1041.011 | 1023.373 | 123.175 | 0.182 | |
| 1041.112 | 1023.404 | 123.308 | 1041.043 | 1023.322 | 123.123 | 0.214 | |
| 1041.187 | 1023.327 | 123.238 | 1041.064 | 1023.251 | 122.737 | 0.522 | |
| 1041.171 | 1023.263 | 122.698 | 1041.081 | 1023.208 | 122.013 | 0.693 | |
| 1041.201 | 1023.243 | 121.868 | 1041.101 | 1023.181 | 121.138 | 0.740 | |
| 1041.217 | 1023.238 | 120.968 | 1041.066 | 1023.151 | 120.144 | 0.842 | |
| 1041.146 | 1023.203 | 119.928 | 1041.042 | 1023.147 | 119.086 | 0.851 | |
| 1041.139 | 1023.240 | 118.898 | 1041.067 | 1023.179 | 117.916 | 0.986 | |
| 1041.142 | 1023.278 | 117.658 | 1041.061 | 1023.208 | 116.695 | 0.969 | |
| 1041.124 | 1023.298 | 116.288 | 1041.038 | 1023.205 | 115.321 | 0.975 | |
| 1041.127 | 1023.261 | 114.788 | 1041.033 | 1023.203 | 113.843 | 0.951 | |
| 1041.172 | 1023.248 | 113.548 | 1040.992 | 1023.273 | 112.861 | 0.711 | |
| 1041.093 | 1023.251 | 112.648 | 1040.955 | 1023.238 | 112.462 | 0.232 | |
| 1041.051 | 1023.100 | 112.568 | 1041.252 | 1023.188 | 112.480 | 0.237 | |
| 1041.743 | 1023.233 | 112.598 | 1042.270 | 1023.525 | 112.446 | 0.622 | |
| 1042.242 | 1023.437 | 112.548 | 1043.033 | 1023.900 | 112.478 | 0.918 | |
| 1043.177 | 1023.877 | 112.598 | 1043.850 | 1024.302 | 112.502 | 0.803 | |
| 1044.412 | 1024.401 | 112.598 | 1044.831 | 1024.795 | 112.490 | 0.585 | |
| 1045.187 | 1024.911 | 112.568 | 1045.456 | 1025.148 | 112.456 | 0.375 | |
| 1045.939 | 1025.142 | 112.568 | 1046.395 | 1025.344 | 112.469 | 0.509 | |
| 1046.846 | 1025.335 | 112.598 | 1047.141 | 1025.457 | 112.490 | 0.337 | |
| 1047.455 | 1025.534 | 112.588 | 1047.753 | 1025.908 | 112.471 | 0.493 | |
| 1048.108 | 1026.129 | 112.558 | 1048.241 | 1026.466 | 112.483 | 0.370 | |
| Below the building | 1048.599 | 1026.849 | 112.524 | ||||
| 1049.693 | 1027.621 | 112.508 | |||||
| 1050.705 | 1028.366 | 112.477 | |||||
| 1051.387 | 1028.788 | 112.491 | |||||
| 1052.364 | 1029.367 | 112.504 | |||||
| 1053.453 | 1029.985 | 112.478 | |||||
| 1054.251 | 1030.423 | 112.644 | |||||
| 1055.375 | 1031.104 | 112.843 | |||||
| 1056.943 | 1032.099 | 112.971 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; He, L.; Luo, H. Real-Time Positioning Method for UAVs in Complex Structural Health Monitoring Scenarios. Drones 2023, 7, 212. https://doi.org/10.3390/drones7030212
Zhou J, He L, Luo H. Real-Time Positioning Method for UAVs in Complex Structural Health Monitoring Scenarios. Drones. 2023; 7(3):212. https://doi.org/10.3390/drones7030212
Chicago/Turabian StyleZhou, Jianguo, Linshu He, and Haitao Luo. 2023. "Real-Time Positioning Method for UAVs in Complex Structural Health Monitoring Scenarios" Drones 7, no. 3: 212. https://doi.org/10.3390/drones7030212
APA StyleZhou, J., He, L., & Luo, H. (2023). Real-Time Positioning Method for UAVs in Complex Structural Health Monitoring Scenarios. Drones, 7(3), 212. https://doi.org/10.3390/drones7030212