
A Survey on Energy Optimization Techniques in UAV-Based Cellular Networks: From Conventional to Machine Learning Approaches

 , , ,
, , ,  , , ,
, , ,  ,
,  and
and 
Abstract
1. Introduction
- Ubiquitous connectivity can be provided to the users as UAV-BSs are mobile and are capable of tracking the users;
- Pop-up scenarios are well managed in terms of connectivity;
- The business of mobile network operators becomes more sustainable as their capital expenditure (CAPEX) and operational expenditure (OPEX) are reduced because they do not need to deploy new fixed BSs since the same UAV-BSs can be reused in various occasions;
- Emergency scenarios can be managed more efficiently, as the UAV-BSs provide a good amount of flexibility.
1.1. Related Works
1.2. Motivation, Contributions, and Organization of the Survey
- To highlight the cruciality of energy optimization in UAV-assisted wireless networking;
- To reveal the state of the art in order to understand where we currently stand;
- To identify the gaps in the literature, on which further research should focus.
- The focus of our survey is not only on energy optimization in general but also on the optimization methods employed in energy efficient UAV-assisted wireless communication networking;
- We categorized the methods according to their type (i.e., conventional and ML) and investigated each energy optimization method accordingly;
- For the sake of completeness, a brief tutorial about the optimization methods is included in our survey;
- We also included the novel landing spot approach, which has gained momentum in the research community.
- Section 2 discusses different types of UAVs in order to reveal their characteristics and capabilities, which is quite important in selecting the UAV for a particular application;
- The power supply and charging mechanisms of UAVs are extensively covered in Section 3. This is particularly important because the optimization can be performed according to the power supply (e.g., battery, grid, fuel, renewable, hybrid), and various charging/recharging mechanisms (e.g., battery swapping, refuelling, wireless power transfer, etc.) can be placed into the optimization model.
- The role of UAV-BSs in wireless communication networks is investigated in Section 4. Since this survey is oriented towards wireless communication networks, we include a thorough discussion on how UAVs can help and what their primary use-cases are. Such discussion also reiterates the reasoning behind using UAVs in today’s and future wireless communication networks and somehow uncovers the importance of the efforts trying to make the whole concept feasible;
- Section 5 presents different types of UAV deployments in order to explain the difference between standalone UAV deployments and UAV-assisted cellular networking because, according to this, the energy optimization model changes significantly;
- The energy optimization in UAV-assisted wireless networking is covered in Section 6, wherein the energy optimization is categorized according to the optimization objective (i.e., propulsion energy, communication energy, and joint optimization of propulsion and communication energies);
- For the sake of completeness of this survey paper, the overview of both conventional and ML algorithms employed in energy optimization of UAV-assisted wireless networks is given in Section 7;
- The energy optimization techniques, as the core part of this survey, are thoroughly discussed in Section 8. Various techniques are introduced by presenting the related literature, which is categorized in terms of the type of UAV deployment and optimization method employed (e.g., conventional and ML). With this section, the state-of-the-art is demonstrated, and a recently proliferating concept—called landing spot optimization—is also included to capture the energy optimization in UAV-assisted wireless networks holistically;
- To understand what and how other technologies can boost EE in UAV-assisted wireless networks, Section 9 mainly introduces the enabling technologies. In this section, a novel technology called RIS is included as one of the enablers, since RIS has recently gained a significant amount of interest in the research community;
- Section 10 identifies the primary challenges and possible future research directions in order to fill the gaps in the literature that would enable the overall UAV-assisted wireless communications concept to be more feasible. Lastly, Section 11 concludes the survey with final remarks.
2. Types of UAVs
3. UAV Power Supply and Charging Mechanisms
3.1. Battery Powered UAVs
3.1.1. Battery Swapping
3.1.2. Laser Beam Charging
3.1.3. Wireless Power Transfer/Wireless Charging
3.2. Grid Powered UAVs: Tethering
3.3. Fuel Cell-Powered UAVs
3.4. Renewable Energy Powered UAVs
3.5. Hybrid Powered UAVs
3.5.1. Fuel Cell-Battery
3.5.2. Solar Cells plus Battery
4. The Role of UAV-Base Station in Wireless Communications
4.1. Emergency Services (Pop-Up Networks)
4.2. Data Harvesting from IoT Devices
4.3. Content Caching and Computation Offloading
4.4. Load Balancing
4.5. Coverage Extension/Relaying
4.6. Capacity/Throughput Enhancement
4.7. Backhauling
4.8. Energy Efficiency
5. Types of UAV Deployments
5.1. Standalone UAV Deployments
5.2. UAV Deployment with Fixed BSs (UAV-Assisted Cellular Networks)
6. Types of Energy Optimization in UAV-Based Cellular Networks
6.1. Optimization of the Propulsion Energy
6.2. Optimization of the Communication Energy
6.3. Joint Optimization of the Communication and Propulsion Energy
6.4. Optimization of the Energy Consumption in UAV-Assisted Cellular Networks
7. Overview of Algorithms for Energy Optimization UAV-Based Cellular Networks
7.1. Conventional Algorithms (CA)
7.1.1. Heuristic Algorithms
7.1.2. Meta-Heuristic Algorithms
Evolutionary-Based Algorithms
- Genetic Algorithm: GA is a meta-heuristic optimization method based on the principles of the biological evolution process that finds the best solution to problems that are difficult to solve with exact methods. The first studies on this algorithm were conducted by John Holland. Holland developed new methods for computer systems based on the principles of natural selection and adaptation existing in nature. Holland argued that processes such as crossover, mutation, and selection that take place in the evolutionary process are very important for solving optimization problems and that better individuals can be obtained in each generation. Holland modeled all these processes for solving problems by considering the perfect adaptation of living things in nature to the ecosystem [127].GA is one of the population-based algorithms used for solving complex problems because it provides a convenient and fast solution. The population consists of individuals that make up the solution set. By eliminating the bad solutions in the solution sets created in each generation, the next generations consist of good solutions that will lead to better results. Since there is more than one solution set in a generation, finding many best solutions in one step is one of the features that distinguish GA from other algorithms. Additionally, by focusing on the part of the solution set, it can perform an effective search and provide the best solution in a short time [128].In the GA application process, the first step is to define how to encode the solutions represented by chromosomes according to different problems. After the necessary parameters are received from the user, the initial population is created so that the GA steps can begin. Each chromosome is an individual and consists of genes. The initial population consists of randomly selected chromosomes. Then, the fitness function that defines the problem solution is determined. Afterwards, chromosomes that will form the next generation are selected from the population, and genetic operators based on genetic processes in nature are applied respectively to obtain better chromosomes. The crossover process is applied to generate new offspring from the individuals obtained from the selection process. The mutation tool is used after the crossover step to provide diversification in the population. At the end of all these processes, new generations are created and compared with the fitness values of other generations. Individuals with good fitness are preserved and passed on to other generations (elitism). This process continues until a specified termination criterion is met [129].There are several features that make the GA different from other conventional heuristic methods. The most important of these are that GA offers more than one solution and needs less information for the obtained solutions. Additionally, GA uses probabilistic transitions rules and can be parallelized very easily for application in both continuous and discrete problems. However, the drawback of using GA is that it is difficult to model the problem using the algorithm, and its implementation involves a high computational cost compared to that of other conventional heuristic approaches [128].
Swarm Intelligence-Based Algorithms
- Particle Swarm Optimization (PSO) Algorithms:The PSO algorithm was introduced by Eberhart and Kennedy in 1995 [131]. It was developed as a population-based optimization method inspired by the two-dimensional behavioral movement of bird and fish flocks in nature. It has a more straightforward computation method than other traditional optimization methods and does not involve time-consuming complex operations. Therefore, it works faster, has shorter computation times, and is more preferred [132].The solution approach of the PSO algorithm is as follows: There is a flock of birds in a region where there is only one source of food. Birds are randomly placed in this food area and no bird knows where the food is. However, the end of each iteration, they know how close they are to the food. In this case, it is a good decision to follow the bird closest to the food. PSO works according to this scenario and is used to solve optimization problems. Birds trying to find food in solution space are called “particles” in PSO. Each particle has a fitness value and velocity that enables it to fly. These are calculated using the fitness function. Particles fly out of the problem space, following the optimum particle at each iteration [133].If there is no specific initial solution generation mechanism for a problem, the PSO is started with a group of random solutions (particle swarm) and tries to reach the global best solution with updates. The first obtained feasible solution value is kept as the best solution and the coordinates of the associated solution are determined. In each local search, this value is kept in memory for later use and is called the “local best solution”. The other best value is the coordinates that provide the best solution ever obtained by all particles in the population. This value is kept as “global best solution”. In each iteration, the local best solution is compared with the global best solution based on the objective function to develop the global best solution.
- Ant Colony Optimization Algorithms (ACO): ACO is a meta-heuristic technique used for solving optimization problems and works based on swarm intelligence as PSO. It was developed by Dorigo et al. in 1991 and tested on different sizes of Traveling Salesman Problems (TSP). Dorigo named this algorithm the ’Ant System’ [134].The basis of this technique is the pheromone hormone that ants use in communication. Ants start the foraging process randomly, and when food is found, they secrete the pheromone hormone to show the other ants in the colony the pathway to the discovered food. This hormone is updated by other ants and helps the colony find the shortest path to food. An intense pheromone amount indicates the quality of the path and increases the probability of preference for the use of that path. If the ants encounter any obstacle on the way between the food and the nest, the ant in front of the obstacle cannot continue and they must make a decision for the new direction of the trip. Each of the new direction options is equally likely to be selected. If the ant chooses the shortest path, this path becomes the preferred route according to the pheromone hormone density. However, if the chosen path is not the shortest, the colony route is reconstructed very quickly and the amount of pheromone on the newly chosen path is increased to create a preference for the ants that come later. Considering that each ant releases the same amount of hormone at the same rate on average, the expected situation is that it takes a long time for the colony to recognize the obstacle and choose the shortest path. However, the path selection made by the ants coming from behind, depending on the amount of pheromone, shortens the total time to trip for food [135].
Trajectory-Based Algorithms
- Simulated Annealing Algorithm (SA): SA is a meta-heuristic algorithm developed by Kirkpatrick et al. in 1983 to solve optimization problems. The SA method is based on the analogy between the annealing process in physical systems that minimizes the energy state of the solids and the solution process in combinatorial optimization problems [136].The SA algorithm starts with an initial solution and a relatively high-temperature value to avoid being trapped by the local minimum. At each iteration, the algorithm produces the next solution within the local neighborhood and the temperature decreases according to specific rules. A new solution that represents the energy level of the system and improves the objective function is always accepted. On the other hand, a workaround proposal that allows for an increase in the temperature of the system or allows a certain degree of divergence/deterioration from the objective function in the system is also accepted. The algorithm is conducted with a new solution if the new solution is accepted and with an existing solution if the new solution is rejected. These processes continue until the termination criteria (number of iterations, the smallest temperature value, etc.) are met.
- Variable Neighborhood Search Algorithm (VNS): The VNS meta-heuristic was developed by Pierre Hansen and Nenad Mladenovic in 1997 [137]. The VNS method, which has been continuously developed since its inception and has applications in numerous fields, is a single solution-based, static/dynamic objective function, based on various neighborhood structures (meta-heuristics other than VNS use a single neighborhood structure). Based on the systematic modification of neighborhood structures used in the search, VNS is a simple and effective meta-heuristic aimed at solving combinatorial optimization problems. Since the local minimum in any neighborhood may not be valid for other neighborhoods, the use of the multiple neighborhood structures is advantageous because it enables the best solutions in different regions of the search space to be obtained. In addition, these neighborhood structures are systematically changed during the search process. Thus, by providing diversification in the search space, the disadvantage of being stuck in the local optimum can be overcome. VNS offers significant advantages over other algorithms due to its simple structure, integration with different solution techniques and it requires few parameters.
7.1.3. Exact Methods
7.2. Machine Learning Algorithms
7.2.1. Supervised Learning (SL)
7.2.2. Unsupervised Learning (UL)
7.2.3. Semi-supervised Learning (SSL)
7.2.4. Deep Learning (DL)
7.2.5. Reinforcement Learning
7.2.6. Federated Learning
8. Energy Optimization Techniques in UAV-Based Cellular Networks
8.1. Energy Optimization of Standalone UAV Deployments
8.1.1. Positioning and Placement
Conventional Approaches
Machine Learning Approaches
8.1.2. Trajectory Design and Path Planning
Conventional Approaches
Machine Learning Approaches
8.1.3. Resource Management
Conventional Approaches
Machine Learning Approaches
8.1.4. Flight and Transmission Scheduling
Conventional Approaches
Machine Learning Approaches
8.1.5. Landing Spot Concept
8.2. Energy Optimization of UAV-Assisted Cellular Networks
8.2.1. Conventional Approaches
8.2.2. Machine Learning Approaches
9. Enabling Technologies for Energy Efficiency in UAV-Based Cellular Networks
9.1. RIS
9.2. Mobile Edge Computing (MEC)/Cloud
9.3. Network Slicing/Network Function Virtualization
9.4. Cooperative Communications
9.5. Energy Harvesting Technologies
10. Challenges and Open Research Problems
10.1. Security Challenges
10.2. Complexity
- Algorithmic planning to manage communication and task allocation;
- Coverage issues and equitable distribution of workload;
- Aerial manipulation of the vehicles;
- Power management;
- Management of the communication infrastructure;
- Path planning to avoid collisions while ensuring adequate coverage without overlaps;
- Interference arising from other UAVs;
- Conflict resolution;
- Safety issues related to preventing the vehicles from flying into one another’s buffer zones;
- Safety issues related to take-off and landing (in some current implementations, a swarm of fixed-wing UAVs spent less than 20% of the time staying simultaneously in the air to execute assigned tasks) while the bulk of the time is spent trying to coordinate the flight of the UAVs;
- Network congestion and channel interference due to multiple UAVs exchanging data to coordinate the execution of assigned tasks.
10.3. Data Availability
10.4. Limited Energy Storage Capacity
10.5. Energy Harvesting Challenges
10.6. Regulations
10.7. Integration of Multi-Tier Heterogeneous UAV Networks
11. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronym | Full Meaning |
| 3D | Three Dimensional |
| 5G | Fifth Generation |
| 6G | Sixth Generation |
| ADMM | Alternating Direction Method of Multipliers |
| AI | Artificial Intelligence |
| ANN | Artificial Neural Networks |
| AP | Access Point |
| ARIMA | Auto-Regressive Integrated Moving Average |
| AtG | Air-to-Ground |
| BCA | Block Coordinate Ascent |
| BCA | Block Coordinate Descent |
| BS | Base Station |
| CA | Conventional Approaches |
| CAPEX | Capital Expenditure |
| CCP | Concave Convex Procedure |
| CNN | Convolution Neural Networks |
| C-RAN | Centralized Radio Access Network |
| CS | Cucker-Smale |
| D2D | Device-to-Device |
| DBS | Data Base Station |
| DC | Direct Current |
| DDPG | Deep Deterimistic Policy Gradient |
| DRL | Deep Reinforcement Learning |
| D-RRH | Drone-Mounted Remote Radio Head |
| DSC | Drone Small Cell |
| EE | Energy Efficiency |
| GA | Genetic Algorithm |
| GMM | Gaussian Mixture Model |
| GPS | Global Positioning System |
| HIL | Hardware in Loop |
| FL | Federated Learning |
| FSO | Free Space Optics |
| kNN | k-Nearest Neighbour |
| IoT | Internet of Things |
| IRS | Intelligent Reflective Surface |
| LiPo | Lithium Polymer |
| LoS | Line of Sight |
| LSTM | Long and Short Term Memory |
| MBS | Macro Base Station |
| MDP | Markov Decision Process |
| MEC | Mobile Edge Computing |
| MIMO | Multiple Input Multiple Output |
| ML | Machine Learning |
| mmWave | Millimeter Wave |
| MNIST | Modified National Institute of Standards and Technology |
| NFV | Network Function Virtualization |
| NLP | Natural Language Processing |
| NR | New Radio |
| NOMA | Non-Orthogonal Multiple Access |
| OEM | Original Equipment Manufacturer |
| OPEX | Operating Expense |
| PSO | Particle Swarm Optimization |
| PV | Photo voltaic |
| QoS | Quality of Service |
| RF | Radio Frequency |
| RIS | Re-configurable Intelligent Surfaces |
| RL | Reinforcement Learning |
| RNN | Recurrent Neural Networks |
| SARSA | State Action State Action Reward |
| SCA | Successive Convex Optimization |
| SEE | Secrecy Energy Efficiency |
| SMPS | Solar Power Management System |
| SVM | Support Vector Machine |
| SVR | Support Vector Regression |
| TBS | Terrestrial Base Station |
| TDMA | Time Division Multiple Access |
| THz | TeraHertz |
| T-UAV | Tethered Unmanned Aerial Vehicle |
| UAV | Unmanned Aerial Vehicle |
| UE | User Equipment |
| URLLC | Ultra-Reliable Low Latency Communication |
| WEM | Weighted Expectation Maximization |
| WiFi | Wireless Fidelity |
| WPCN | Wireless Powered Communication Networks |
| WPT | Wireless Power Transfer |
| XGBOOST | Extreme Gradient Boosting |
References
- Ali, R.; Zikria, Y.B.; Bashir, A.K.; Garg, S.; Kim, H.S. URLLC for 5G and Beyond: Requirements, Enabling Incumbent Technologies and Network Intelligence. IEEE Access 2021, 9, 67064–67095. [Google Scholar] [CrossRef]
- Chettri, L.; Bera, R. A Comprehensive Survey on Internet of Things (IoT) Toward 5G Wireless Systems. IEEE Internet Things J. 2020, 7, 16–32. [Google Scholar] [CrossRef]
- Ericsson. Ericsson Mobility Report; Technical report; Ericsson: Stockholm, Sweden, 2021. [Google Scholar]
- Jiang, W.; Han, B.; Habibi, M.A.; Schotten, H.D. The Road Towards 6G: A Comprehensive Survey. IEEE Open J. Commun. Soc. 2021, 2, 334–366. [Google Scholar] [CrossRef]
- Alwis, C.D.; Kalla, A.; Pham, Q.V.; Kumar, P.; Dev, K.; Hwang, W.J.; Liyanage, M. Survey on 6G Frontiers: Trends, Applications, Requirements, Technologies and Future Research. IEEE Open J. Commun. Soc. 2021, 2, 836–886. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, J.; Wang, J.; Cao, Y.; Kato, N. When Machine Learning Meets Privacy in 6G: A Survey. IEEE Commun. Surv. Tutor. 2020, 22, 2694–2724. [Google Scholar] [CrossRef]
- Mao, B.; Tang, F.; Kawamoto, Y.; Kato, N. AI Models for Green Communications Towards 6G. IEEE Commun. Surv. Tutor. 2021. [Google Scholar] [CrossRef]
- Saadi, M. 6G: The Network of Technology Convergence; Technical report; ABI Research: Oyster Bay, NY, USA, 2022. [Google Scholar]
- Wang, X.; Zhou, Z.; Yang, Z.; Liu, Y.; Peng, C. Spatio-temporal analysis and prediction of cellular traffic in metropolis. In Proceedings of the 2017 IEEE 25th International Conference on Network Protocols (ICNP), Toronto, ON, Canada, 10–13 October 2017; pp. 1–10. [Google Scholar] [CrossRef]
- Ozturk, M.; Abubakar, A.I.; Nadas, J.P.B.; Rais, R.N.B.; Hussain, S.; Imran, M.A. Energy Optimization in Ultra-Dense Radio Access Networks via Traffic-Aware Cell Switching. IEEE Trans. Green Commun. Netw. 2021, 5, 832–845. [Google Scholar] [CrossRef]
- Barlacchi, G.; De Nadai, M.; Larcher, R.; Casella, A.; Chitic, C.; Torrisi, G.; Antonelli, F.; Vespignani, A.; Pentland, A.; Lepri, B. A multi-source dataset of urban life in the city of Milan and the Province of Trentino. Sci. Data 2015, 2, 150055. [Google Scholar] [CrossRef]
- Abubakar, A.I.; Mollel, M.S.; Ozturk, M.; Hussain, S.; Imran, M.A. A lightweight cell switching and traffic offloading scheme for energy optimization in ultra-dense heterogeneous networks. Phys. Commun. 2022, 52, 101643. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Klaine, P.V.; Nadas, J.P.B.; Souza, R.D.; Imran, M.A. Distributed Drone Base Station Positioning for Emergency Cellular Networks Using Reinforcement Learning. Cogn. Comput. 2018, 10, 790–804. [Google Scholar] [CrossRef]
- Zeng, Y.; Wu, Q.; Zhang, R. Accessing From the Sky: A Tutorial on UAV Communications for 5G and Beyond. Proc. IEEE 2019, 107, 2327–2375. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [PubMed]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Jiang, X.; Sheng, M.; Zhao, N.; Xing, C.; Lu, W.; Wang, X. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2021. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef]
- Dargan, S.; Kumar, M.; Ayyagari, M.R.; Kumar, G. A Survey of Deep Learning and Its Applications: A New Paradigm to Machine Learning. Arch. Comput. Methods Eng. 2019, 27, 1071–1092. [Google Scholar] [CrossRef]
- L’Heureux, A.; Grolinger, K.; Elyamany, H.F.; Capretz, M.A.M. Machine Learning With Big Data: Challenges and Approaches. IEEE Access 2017, 5, 7776–7797. [Google Scholar] [CrossRef]
- Zhou, L.; Pan, S.; Wang, J.; Vasilakos, A.V. Machine learning on big data: Opportunities and challenges. Neurocomputing 2017, 237, 350–361. [Google Scholar] [CrossRef]
- Babu, N.; Virgili, M.; Papadias, C.B.; Popovski, P.; Forsyth, A.J. Cost- and Energy-Efficient Aerial Communication Networks With Interleaved Hovering and Flying. IEEE Trans. Veh. Technol. 2021, 70, 9077–9087. [Google Scholar] [CrossRef]
- Gao, F.; Zhou, Y.; Ma, X.; Yang, T.; Cheng, N.; Lu, N. Coverage-maximization and Energy-efficient Drone Small Cell Deployment in Aerial-Ground Collaborative Vehicular Networks. In Proceedings of the 2019 IEEE 4th International Conference on Computer and Communication Systems (ICCCS), Singapore, 23–25 February 2019; pp. 559–564. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, J.; Zhang, R. Energy Minimization for Wireless Communication With Rotary-Wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345. [Google Scholar] [CrossRef]
- Liu, T.; Cui, M.; Zhang, G.; Wu, Q.; Chu, X.; Zhang, J. 3D Trajectory and Transmit Power Optimization for UAV-Enabled Multi-Link Relaying Systems. IEEE Trans. Green Commun. Netw. 2021, 5, 392–405. [Google Scholar] [CrossRef]
- Hua, M.; Wang, Y.; Li, C.; Huang, Y.; Yang, L. Energy-Efficient Optimization for UAV-Aided Cellular Offloading. IEEE Wirel. Commun. Lett. 2019, 8, 769–772. [Google Scholar] [CrossRef]
- Zhang, M.; Fu, S.; Fan, Q. Joint 3D Deployment and Power Allocation for UAV-BS: A Deep Reinforcement Learning Approach. IEEE Wirel. Commun. Lett. 2021, 10, 2309–2312. [Google Scholar] [CrossRef]
- Kang, H.; Joung, J.; Kang, J. Power-Efficient Formation of UAV Swarm: Just Like Flying Birds? In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Qi, H.; Hu, Z.; Huang, H.; Wen, X.; Lu, Z. Energy Efficient 3-D UAV Control for Persistent Communication Service and Fairness: A Deep Reinforcement Learning Approach. IEEE Access 2020, 8, 53172–53184. [Google Scholar] [CrossRef]
- Petrov, V.; Gapeyenko, M.; Moltchanov, D.; Andreev, S.; Heath, R.W. Hover or Perch: Comparing Capacity of Airborne and Landed Millimeter-Wave UAV Cells. IEEE Wirel. Commun. Lett. 2020, 9, 2059–2063. [Google Scholar] [CrossRef]
- Bayerlein, H.; Gangula, R.; Gesbert, D. Learning to Rest: A Q-Learning Approach to Flying Base Station Trajectory Design with Landing Spots. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 724–728. [Google Scholar] [CrossRef]
- Shakoor, S.; Kaleem, Z.; Baig, M.I.; Chughtai, O.; Duong, T.Q.; Nguyen, L.D. Role of UAVs in Public Safety Communications: Energy Efficiency Perspective. IEEE Access 2019, 7, 140665–140679. [Google Scholar] [CrossRef]
- Lahmeri, M.A.; Kishk, M.A.; Alouini, M.S. Artificial Intelligence for UAV-Enabled Wireless Networks: A Survey. IEEE Open J. Commun. Soc. 2021, 2, 1015–1040. [Google Scholar] [CrossRef]
- Carrio, A.; Sampedro, C.; Rodriguez-Ramos, A.; Campoy, P. A review of deep learning methods and applications for unmanned aerial vehicles. J. Sens. 2017, 2017, 3296874. [Google Scholar] [CrossRef]
- Busnel, Y.; Caillouet, C.; Coudert, D. Self-organized UAV-based Supervision and Connectivity: Challenges and Opportunities. In Proceedings of the 2019 IEEE 18th International Symposium on Network Computing and Applications (NCA), Cambridge, MA, USA, 26–28 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Aliu, O.G.; Imran, A.; Imran, M.A.; Evans, B. A Survey of Self Organisation in Future Cellular Networks. IEEE Commun. Surv. Tutor. 2013, 15, 336–361. [Google Scholar] [CrossRef]
- Klaine, P.V.; Imran, M.A.; Onireti, O.; Souza, R.D. A survey of machine learning techniques applied to self-organizing cellular networks. IEEE Commun. Surv. Tutor. 2017, 19, 2392–2431. [Google Scholar] [CrossRef]
- Abubakar, A.I.; Omeke, K.G.; Ozturk, M.; Hussain, S.; Imran, M.A. The role of artificial intelligence driven 5G networks in COVID-19 outbreak: Opportunities, challenges, and future outlook. Front. Commun. Netw. 2020, 1, 575065. [Google Scholar] [CrossRef]
- Nonami, K.; Kendoul, F.; Suzuki, S.; Wang, W.; Nakazawa, D. Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Saeed, A.S.; Younes, A.B.; Islam, S.; Dias, J.; Seneviratne, L.; Cai, G. A review on the platform design, dynamic modeling and control of hybrid UAVs. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Colorado, CO, USA, 9–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 806–815. [Google Scholar]
- Ducard, G.J.; Allenspach, M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 107035. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Khofiyah, N.A.; Maret, S.; Sutopo, W.; Nugroho, B.D.A. Goldsmith’s Commercialization Model for Feasibility Study of Technology Lithium Battery Pack Drone. In Proceedings of the 2018 5th International Conference on Electric Vehicular Technology (ICEVT), Surakarta, Indonesia, 30–31 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 147–151. [Google Scholar]
- Verstraete, D.; Lehmkuehler, K.; Wong, K. Design of a fuel cell powered blended wing body UAV. In ASME International Mechanical Engineering Congress and Exposition; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 45172, pp. 621–629. [Google Scholar]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. UAVs as mobile infrastructure: Addressing battery lifetime. IEEE Commun. Mag. 2019, 57, 132–137. [Google Scholar] [CrossRef]
- Lee, D.; Zhou, J.; Lin, W.T. Autonomous battery swapping system for quadcopter. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 118–124. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. Power supply architectures for drones-a review. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; IEEE: Piscataway, NJ, USA, 2019; Volume 1, pp. 5826–5831. [Google Scholar]
- Simic, M.; Bil, C.; Vojisavljevic, V. Investigation in wireless power transmission for UAV charging. Procedia Comput. Sci. 2015, 60, 1846–1855. [Google Scholar] [CrossRef]
- Hassan, J.; Bokani, A.; Kanhere, S.S. Recharging of Flying Base Stations using Airborne RF Energy Sources. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference Workshop (WCNCW), Marrakech, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Kishk, M.A.; Bader, A.; Alouini, M.S. On the 3-D placement of airborne base stations using tethered UAVs. IEEE Trans. Commun. 2020, 68, 5202–5215. [Google Scholar] [CrossRef]
- Gu, B.W.; Choi, S.Y.; Choi, Y.S.; Cai, G.; Seneviratne, L.; Rim, C.T. Novel roaming and stationary tethered aerial robots for continuous mobile missions in nuclear power plants. Nucl. Eng. Technol. 2016, 48, 982–996. [Google Scholar] [CrossRef]
- Bushnaq, O.M.; Kishk, M.A.; Celik, A.; Alouini, M.S.; Al-Naffouri, T.Y. Optimal deployment of tethered drones for maximum cellular coverage in user clusters. IEEE Trans. Wirel. Commun. 2020, 20, 2092–2108. [Google Scholar] [CrossRef]
- Matracia, M.; Kishk, M.A.; Alouini, M.S. On the Topological Aspects of UAV-Assisted Post-Disaster Wireless Communication Networks. arXiv 2021, arXiv:2109.13671. [Google Scholar] [CrossRef]
- Hwang, J.J.; Kuo, J.K.; Wu, W.; Chang, W.R.; Lin, C.H.; Wang, S.E. Lifecycle performance assessment of fuel cell/battery electric vehicles. Int. J. Hydrogen Energy 2013, 38, 3433–3446. [Google Scholar] [CrossRef]
- Pan, Z.; An, L.; Wen, C. Recent advances in fuel cells based propulsion systems for unmanned aerial vehicles. Appl. Energy 2019, 240, 473–485. [Google Scholar] [CrossRef]
- Kendall, K.; Pollet, B. 4.12-Hydrogen and Fuel Cells in Transport. Compr. Renew. Energy 2012, 4, 301. [Google Scholar]
- Rhoads, G.; Bradley, T.; Wagner, N.; Taylor, B.; Keen, D. Design and flight test results for a 24 h fuel cell unmanned aerial vehicle. In Proceedings of the 8th Annual International Energy Conversion Engineering Conference, Nashville, TN, USA, 25–28 July 2010; p. 6690. [Google Scholar]
- Richardson, P.L. Upwind dynamic soaring of albatrosses and UAVs. Prog. Oceanogr. 2015, 130, 146–156. [Google Scholar] [CrossRef]
- Bonnin, V.; Bénard, E.; Moschetta, J.M.; Toomer, C. Energy-harvesting mechanisms for UAV flight by dynamic soaring. Int. J. Micro Air Veh. 2015, 7, 213–229. [Google Scholar] [CrossRef]
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Lotz, R.; Siebenmann, D.; Leutenegger, S.; Alexis, K.; Siegwart, R. A solar-powered hand-launchable UAV for low-altitude multi-day continuous flight. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 3986–3993. [Google Scholar]
- Donateo, T.; Ficarella, A.; Spedicato, L.; Arista, A.; Ferraro, M. A new approach to calculating endurance in electric flight and comparing fuel cells and batteries. Appl. Energy 2017, 187, 807–819. [Google Scholar] [CrossRef]
- Belmonte, N.; Staulo, S.; Fiorot, S.; Luetto, C.; Rizzi, P.; Baricco, M. Fuel cell powered octocopter for inspection of mobile cranes: Design, cost analysis and environmental impacts. Appl. Energy 2018, 215, 556–565. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, D.; Ng, D.W.K.; Dai, L.; Schober, R. Optimal 3D-trajectory design and resource allocation for solar-powered UAV communication systems. IEEE Trans. Commun. 2019, 67, 4281–4298. [Google Scholar] [CrossRef]
- Verstraete, D.; Harvey, J.R.; Palmer, J.L. Hardware-in-the-loop simulation of fuel-cell-based hybrid-electrical UAV propulsion. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012; Volume 4, pp. 2662–2674. [Google Scholar]
- Gong, A.; Verstraete, D. Role of battery in a hybrid electrical fuel cell UAV propulsion system. In Proceedings of the 52nd AIAA Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar]
- Lu, M.; Bagheri, M.; James, A.P.; Phung, T. Wireless charging techniques for UAVs: A review, reconceptualization, and extension. IEEE Access 2018, 6, 29865–29884. [Google Scholar] [CrossRef]
- Morton, S.; D’Sa, R.; Papanikolopoulos, N. Solar powered UAV: Design and experiments. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2460–2466. [Google Scholar]
- Shiau, J.K.; Ma, D.M.; Yang, P.Y.; Wang, G.F.; Gong, J.H. Design of a solar power management system for an experimental UAV. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1350–1360. [Google Scholar] [CrossRef]
- Sambo, Y.A.; Klaine, P.V.; Nadas, J.P.B.; Imran, M.A. Energy Minimization UAV Trajectory Design for Delay-Tolerant Emergency Communication. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Jin, W.; Yang, J.; Fang, Y.; Feng, W. Research on Application and Deployment of UAV in Emergency Response. In Proceedings of the 2020 IEEE 10th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 17–19 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 277–280. [Google Scholar]
- Deepak, G.C.; Ladas, A.; Sambo, Y.A.; Pervaiz, H.; Politis, C.; Imran, M.A. An Overview of Post-Disaster Emergency Communication Systems in the Future Networks. IEEE Wirel. Commun. 2019, 26, 132–139. [Google Scholar] [CrossRef]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative remote sensing at ultra-high resolution with UAV spectroscopy: A review of sensor technology, measurement procedures, and data correction workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Singh, S.; Malik, A.; Kumar, R.; Singh, P.K. A proficient data gathering technique for unmanned aerial vehicle-enabled heterogeneous wireless sensor networks. Int. J. Commun. Syst. 2021, 34, e4956. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Feng, T.; Xie, L.; Yao, J.; Xu, J. UAV-Enabled Data Collection for Wireless Sensor Networks with Distributed Beamforming. IEEE Trans. Wirel. Commun. 2021. [Google Scholar] [CrossRef]
- Bayerlein, H.; Theile, M.; Caccamo, M.; Gesbert, D. UAV Path Planning for Wireless Data Harvesting: A Deep Reinforcement Learning Approach. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Virtual, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Y.; Dai, H.N.; Wang, H.; Imran, M.; Wang, X.; Shoaib, M. UAV-enabled data acquisition scheme with directional wireless energy transfer for Internet of Things. Comput. Commun. 2020, 155, 184–196. [Google Scholar] [CrossRef]
- Liu, D.; Chen, B.; Yang, C.; Molisch, A.F. Caching at the wireless edge: Design aspects, challenges, and future directions. IEEE Commun. Mag. 2016, 54, 22–28. [Google Scholar] [CrossRef]
- Dai, H.; Zhang, L.; Bian, H.; Wang, B. UAV relaying assisted transmission optimization with caching in vehicular networks. Phys. Commun. 2020, 43, 101214. [Google Scholar] [CrossRef]
- Wu, H.; Lyu, F.; Zhou, C.; Chen, J.; Wang, L.; Shen, X. Optimal UAV Caching and Trajectory in Aerial-Assisted Vehicular Networks: A Learning-Based Approach. IEEE J. Sel. Areas Commun. 2020, 38, 2783–2797. [Google Scholar] [CrossRef]
- Mach, P.; Becvar, Z. Mobile Edge Computing: A Survey on Architecture and Computation Offloading. IEEE Commun. Surv. Tutor. 2017, 19, 1628–1656. [Google Scholar] [CrossRef]
- Cui, Y.; Zheng, J.; Wang, X.; Diao, X.; Cai, Y.; Liu, S. UAV-enabled MEC system: Locations and coverage optimization. In Proceedings of the IET 8th International Conference on Wireless, Mobile Multimedia Networks, Beijing, China, 12–15 October 2019; pp. 12–18. [Google Scholar] [CrossRef]
- Wang, H.; Ke, H.; Sun, W. Unmanned-Aerial-Vehicle-Assisted Computation Offloading for Mobile Edge Computing Based on Deep Reinforcement Learning. IEEE Access 2020, 8, 180784–180798. [Google Scholar] [CrossRef]
- Sanike, A.; Subramanyam, A.; Reddy, S.S.S.; RaghuRam, G. Load balancing technique to handle the congestion in the communication networks. In Proceedings of the 2015 Conference on Power, Control, Communication and Computational Technologies for Sustainable Growth (PCCCTSG), Kurnool, India, 11–12 December 2015; pp. 289–293. [Google Scholar] [CrossRef]
- Bor-Yaliniz, I.; Yanikomeroglu, H. The New Frontier in RAN Heterogeneity: Multi-Tier Drone-Cells. IEEE Commun. Mag. 2016, 54, 48–55. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, H.; Liu, Y.; Li, X.; Ji, H. An Intelligent UAV Deployment Scheme for Load Balance in Small Cell Networks Using Machine Learning. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Fan, Q.; Ansari, N. Towards Traffic Load Balancing in Drone-Assisted Communications for IoT. IEEE Internet Things J. 2019, 6, 3633–3640. [Google Scholar] [CrossRef]
- Saxena, V.; Jaldén, J.; Klessig, H. Optimal UAV Base Station Trajectories Using Flow-Level Models for Reinforcement Learning. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 1101–1112. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the 2014 IEEE Global Communications Conference, Sydney, Australia, 8–12 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2898–2904. [Google Scholar]
- Jaziri, A.; Nasri, R.; Chahed, T. Congestion mitigation in 5G networks using drone relays. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 233–238. [Google Scholar]
- Zhan, P.; Yu, K.; Swindlehurst, A.L. Wireless relay communications with unmanned aerial vehicles: Performance and optimization. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2068–2085. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput maximization for mobile relaying systems. In Proceedings of the 2016 IEEE Globecom Workshops (GC Wkshps), Washington, DC, USA, 4–8 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Li, Y.; Yang, D.; Xu, Y.; Xiao, L.; Chen, H. Throughput maximization for UAV-enabled relaying in wireless powered communication networks. Sensors 2019, 19, 2989. [Google Scholar] [CrossRef] [PubMed]
- Zaidi, S.K.; Hasan, S.F.; Gui, X.; Siddique, N.; Ahmad, S. Exploiting UAV as NOMA based Relay for Coverage Extension. In Proceedings of the 2019 2nd International Conference on Computer Applications Information Security (ICCAIS), Riyadh, Saudi Arabia, 1–3 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- You, X.; Wang, C.X.; Huang, J.; Gao, X.; Zhang, Z.; Wang, M.; Huang, Y.; Zhang, C.; Jiang, Y.; Wang, J.; et al. Towards 6G wireless communication networks: Vision, enabling technologies, and new paradigm shifts. Sci. China Inf. Sci. 2021, 64, 1–74. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef]
- Sharma, V.; Bennis, M.; Kumar, R. UAV-assisted heterogeneous networks for capacity enhancement. IEEE Commun. Lett. 2016, 20, 1207–1210. [Google Scholar] [CrossRef]
- Song, Q.; Zheng, F.C.; Jin, S. Multiple UAVs Enabled Data Offloading for Cellular Hotspots. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Challita, U.; Saad, W. Network Formation in the Sky: Unmanned Aerial Vehicles for Multi-Hop Wireless Backhauling. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Gapeyenko, M.; Petrov, V.; Moltchanov, D.; Andreev, S.; Himayat, N.; Koucheryavy, Y. Flexible and Reliable UAV-Assisted Backhaul Operation in 5G mmWave Cellular Networks. IEEE J. Sel. Areas Commun. 2018, 36, 2486–2496. [Google Scholar] [CrossRef]
- Khallaf, H.S.; Uysal, M. Comprehensive study on UAV-based FSO links for high-speed train backhauling. Appl. Opt. 2021, 60, 8239–8247. [Google Scholar] [CrossRef]
- Alsharoa, A.; Ghazzai, H.; Kadri, A.; Kamal, A.E. Energy management in cellular hetnets assisted by solar powered drone small cells. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Chang, W.; Meng, Z.T.; Liu, K.C.; Wang, L.C. Energy-Efficient Sleep Strategy for the UBS-Assisted Small-Cell Network. IEEE Trans. Veh. Technol. 2021, 70, 5178–5183. [Google Scholar] [CrossRef]
- Chakareski, J.; Naqvi, S.; Mastronarde, N.; Xu, J.; Afghah, F.; Razi, A. An Energy Efficient Framework for UAV-Assisted Millimeter Wave 5G Heterogeneous Cellular Networks. IEEE Trans. Green Commun. Netw. 2019, 3, 37–44. [Google Scholar] [CrossRef]
- Ouyang, J.; Zhuang, Y.; Lin, M.; Liu, J. Optimization of beamforming and path planning for UAV-assisted wireless relay networks. Chin. J. Aeronaut. 2014, 27, 313–320. [Google Scholar] [CrossRef]
- Chen, X.; Tang, J.; Lao, S. Review of unmanned aerial vehicle swarm communication architectures and routing protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Hentati, A.I.; Fourati, L.C. Comprehensive survey of UAVs communication networks. Comput. Stand. Interfaces 2020, 72, 103451. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Zhong, Y.; Quek, T.Q.; Ge, X. Heterogeneous cellular networks with spatio-temporal traffic: Delay analysis and scheduling. IEEE J. Sel. Areas Commun. 2017, 35, 1373–1386. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-Efficient UAV Communication With Trajectory Optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Comprehensive Energy Consumption Model for Unmanned Aerial Vehicles, Based on Empirical Studies of Battery Performance. IEEE Access 2018, 6, 58383–58394. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, W.; Guan, X.; Wu, Q. Energy-Efficient Trajectory Design for UAV-Enabled Communication Under Malicious Jamming. IEEE Wirel. Commun. Lett. 2021, 10, 206–210. [Google Scholar] [CrossRef]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D Placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for Energy-Efficient Maximal Coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef]
- Wang, L.; Hu, B.; Chen, S.; Cui, J. UAV-enabled reliable mobile relaying based on downlink NOMA. IEEE Access 2020, 8, 25237–25248. [Google Scholar] [CrossRef]
- You, J.; Jung, S.; Seo, J.; Kang, J. Energy-Efficient 3-D Placement of an Unmanned Aerial Vehicle Base Station With Antenna Tilting. IEEE Commun. Lett. 2020, 24, 1323–1327. [Google Scholar] [CrossRef]
- Plachy, J.; Becvar, Z. Energy Efficient Positioning of Flying Base Stations via Coulomb’s law. In Proceedings of the 2020 IEEE Globecom Workshops (GC Wkshps), Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Faqir, O.J.; Kerrigan, E.C.; Gündüz, D. Joint optimization of transmission and propulsion in aerial communication networks. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 3955–3960. [Google Scholar] [CrossRef]
- Li, T.; Sheng, M.; Lyu, R.; Liu, J.; Li, J. UAV assisted heterogeneous wireless networks: Potentials and challenges. ZTE Commun. 2018, 16. [Google Scholar] [CrossRef]
- Shehzad, M.K.; Akhtar, M.W.; Hassan, S.A. Performance of mmWave UAV-Assisted 5G Hybrid Heterogeneous Networks. Auton. Airborne Wirel. Netw. 2021, 97–118. [Google Scholar] [CrossRef]
- Rothlauf, F. Optimization methods. In Design of Modern Heuristics; Springer: Berlin/Heidelberg, Germany, 2011; pp. 45–102. [Google Scholar]
- Chen, S.; Shi, L.; Ding, X.; Lv, Z.; Li, Z. Energy Efficient Resource Allocation and Trajectory Optimization in UAV-Assisted Mobile Edge Computing System. In Proceedings of the 2021 7th International Conference on Big Data Computing and Communications (BigCom), Deqing, China, 13–15 August 2021; pp. 7–13. [Google Scholar] [CrossRef]
- Jeong, H.Y.; Song, B.D.; Lee, S. Truck-drone hybrid delivery routing: Payload-energy dependency and No-Fly zones. Int. J. Prod. Econ. 2019, 214, 220–233. [Google Scholar] [CrossRef]
- Gogna, A.; Tayal, A. Metaheuristics: Review and application. J. Exp. Theor. Artif. Intell. 2013, 25, 503–526. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2020, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Shivgan, R.; Dong, Z. Energy-Efficient Drone Coverage Path Planning using Genetic Algorithm. In Proceedings of the 2020 IEEE 21st International Conference on High Performance Switching and Routing (HPSR), Newark, NJ, USA, 11–14 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Angadi, B.M.; Kakkasageri, M.S.; Manvi, S.S. Computational intelligence techniques for localization and clustering in wireless sensor networks. In Recent Trends in Computational Intelligence Enabled Research; Elsevier: Amsterdam, The Netherlands, 2021; pp. 23–40. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2017, 22, 387–408. [Google Scholar] [CrossRef]
- Shi, Y. Particle swarm optimization: Developments, applications and resources. In Proceedings of the 2001 Congress on Evolutionary Computation (IEEE Cat. No.01TH8546), Seoul, Republic of Korea, 27–30 May 2001; Volume 1, pp. 81–86. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]
- Dorigo, M.; Stutzle, T. Ant Colony Optimization: Overview and Recent Advances. In Handbook of Metaheuristics; Springer: Berlin/Heidelberg, Germany, 2010; pp. 227–263. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Mladenović, N.; Hansen, P. Variable neighborhood search. Comput. Oper. Res. 1997, 24, 1097–1100. [Google Scholar] [CrossRef]
- Loyola-Gonzalez, O. Black-box vs. white-box: Understanding their advantages and weaknesses from a practical point of view. IEEE Access 2019, 7, 154096–154113. [Google Scholar] [CrossRef]
- Horst, R.; Tuy, H. Global Optimization: Deterministic Approaches; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Papadimitriou, C.H.; Steiglitz, K. Combinatorial Optimization: Algorithms and Complexity; Courier Corporation: North Chelmsford, MA, USA, 1998. [Google Scholar]
- Radmanesh, M.; Kumar, M. Flight formation of UAVs in presence of moving obstacles using fast-dynamic mixed integer linear programming. Aerosp. Sci. Technol. 2016, 50, 149–160. [Google Scholar] [CrossRef]
- Ahmed, S.; Mohamed, A.; Harras, K.; Kholief, M.; Mesbah, S. Energy efficient path planning techniques for UAV-based systems with space discretization. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Lin, X.; Wang, Z.; Zeng, S.; Huang, W.; Li, X. Real-time optimization strategy by using sequence quadratic programming with multivariate nonlinear regression for a fuel cell electric vehicle. Int. J. Hydrogen Energy 2021, 46, 13240–13251. [Google Scholar] [CrossRef]
- Jung, S.; Kim, J.; Kim, J.H. Joint message-passing and convex optimization framework for energy-efficient surveillance UAV scheduling. Electronics 2020, 9, 1475. [Google Scholar] [CrossRef]
- Ahmed, S.; Chowdhury, M.Z.; Jang, Y.M. Energy-Efficient UAV-to-User Scheduling to Maximize Throughput in Wireless Networks. IEEE Access 2020, 8, 21215–21225. [Google Scholar] [CrossRef]
- Lu, G.; Zhang, J.; Xiang, L.; Ge, X. A Global Optimization Method for Energy-Minimal UAV-Aided Data Collection over Fixed Flight Path. In Proceedings of the ICC 2022-IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1220–1226. [Google Scholar]
- Mohiuddin, A.; Taha, T.; Zweiri, Y.; Gan, D. Dual-UAV Payload Transportation Using Optimized Velocity Profiles via Real-Time Dynamic Programming. Drones 2023, 7, 171. [Google Scholar] [CrossRef]
- Mahdavi, M.; Alhelou, H.H.; Hatziargyriou, N.D.; Al-Hinai, A. An efficient mathematical model for distribution system reconfiguration using AMPL. IEEE Access 2021, 9, 79961–79993. [Google Scholar] [CrossRef]
- Bynum, M.L.; Hackebeil, G.A.; Hart, W.E.; Laird, C.D.; Nicholson, B.L.; Siirola, J.D.; Watson, J.P.; Woodruff, D.L. Pyomo-Optimization Modeling in Python; Springer: Berlin/Heidelberg, Germany, 2021; Volume 67. [Google Scholar]
- Dunning, I.; Huchette, J.; Lubin, M. JuMP: A modeling language for mathematical optimization. SIAM Rev. 2017, 59, 295–320. [Google Scholar] [CrossRef]
- Nabli, H. An overview on the simplex algorithm. Appl. Math. Comput. 2009, 210, 479–489. [Google Scholar] [CrossRef]
- Den Hertog, D. Interior Point Approach to Linear, Quadratic and Convex Programming: Algorithms and Complexity; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 277. [Google Scholar]
- Boyd, S.; Mattingley, J. Branch and bound methods. Notes EE364b, Stanf. Univ. 2007, 2006, 7. [Google Scholar]
- Mitchell, J.E. Branch-and-cut algorithms for combinatorial optimization problems. Handb. Appl. Optim. 2002, 1, 65–77. [Google Scholar]
- Zhang, C.; Patras, P.; Haddadi, H. Deep Learning in Mobile and Wireless Networking: A Survey. IEEE Commun. Surv. Tutor. 2019, 21, 2224–2287. [Google Scholar] [CrossRef]
- Singh, A.; Thakur, N.; Sharma, A. A review of supervised machine learning algorithms. In Proceedings of the 2016 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; pp. 1310–1315. [Google Scholar]
- Kotsiantis, S.B.; Zaharakis, I.; Pintelas, P. Supervised machine learning: A review of classification techniques. Emerg. Artif. Intell. Appl. Comput. Eng. 2007, 160, 3–24. [Google Scholar]
- Chen, S.; Goo, Y.J.J.; Shen, Z.D. A Hybrid Approach of Stepwise Regression, Logistic Regression, Support Vector Machine, and Decision Tree for Forecasting Fraudulent Financial Statements. Sci. World J. 2014, 2014, 968712. [Google Scholar] [CrossRef]
- Li, N.; Shepperd, M.; Guo, Y. A systematic review of unsupervised learning techniques for software defect prediction. Inf. Softw. Technol. 2020, 122, 106287. [Google Scholar] [CrossRef]
- Sinaga, K.P.; Yang, M.S. Unsupervised K-Means Clustering Algorithm. IEEE Access 2020, 8, 80716–80727. [Google Scholar] [CrossRef]
- Ben-David, S. A framework for statistical clustering with constant time approximation algorithms for K-median and K-means clustering. Mach. Learn. 2006, 66, 243–257. [Google Scholar] [CrossRef]
- Yürüşen, N.Y.; Uzunoğlu, B.; Talayero, A.P.; Estopiñán, A.L. Apriori and K-Means algorithms of machine learning for spatio-temporal solar generation balancing. Renew. Energy 2021, 175, 702–717. [Google Scholar] [CrossRef]
- Zebari, R.; Abdulazeez, A.; Zeebaree, D.; Zebari, D.; Saeed, J. A Comprehensive Review of Dimensionality Reduction Techniques for Feature Selection and Feature Extraction. J. Appl. Sci. Technol. Trends 2020, 1, 56–70. [Google Scholar] [CrossRef]
- van Engelen, J.E.; Hoos, H.H. A survey on semi-supervised learning. Mach. Learn. 2019, 109, 373–440. [Google Scholar] [CrossRef]
- Wason, R. Deep learning: Evolution and expansion. Cogn. Syst. Res. 2018, 52, 701–708. [Google Scholar] [CrossRef]
- Alom, M.Z.; Taha, T.M.; Yakopcic, C.; Westberg, S.; Sidike, P.; Nasrin, M.S.; Hasan, M.; Essen, B.C.V.; Awwal, A.A.S.; Asari, V.K. A State-of-the-Art Survey on Deep Learning Theory and Architectures. Electronics 2019, 8, 292. [Google Scholar] [CrossRef]
- Pouyanfar, S.; Sadiq, S.; Yan, Y.; Tian, H.; Tao, Y.; Reyes, M.P.; Shyu, M.L.; Chen, S.C.; Iyengar, S.S. A Survey on Deep Learning: Algorithms, Techniques, and Applications. ACM Comput. Surv. 2018, 51. [Google Scholar] [CrossRef]
- Dong, S.; Wang, P.; Abbas, K. A survey on deep learning and its applications. Comput. Sci. Rev. 2021, 40, 100379. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Nguyen, N.D.; Nahavandi, S. Deep Reinforcement Learning for Multiagent Systems: A Review of Challenges, Solutions, and Applications. IEEE Trans. Cybern. 2020, 50, 3826–3839. [Google Scholar] [CrossRef]
- Kober, J.; Bagnell, J.A.; Peters, J. Reinforcement learning in robotics: A survey. Int. J. Robot. Res. 2013, 32, 1238–1274. [Google Scholar] [CrossRef]
- Vázquez-Canteli, J.R.; Nagy, Z. Reinforcement learning for demand response: A review of algorithms and modeling techniques. Appl. Energy 2019, 235, 1072–1089. [Google Scholar] [CrossRef]
- McMahan, B.; Moore, E.; Ramage, D.; Hampson, S.; y Arcas, B.A. Communication-efficient learning of deep networks from decentralized data. In Proceedings of the Artificial Intelligence and Statistics, Lauderdale, FL, USA, 20 April 2017; pp. 1273–1282. [Google Scholar]
- Li, L.; Fan, Y.; Tse, M.; Lin, K.Y. A review of applications in federated learning. Comput. Ind. Eng. 2020, 149, 106854. [Google Scholar] [CrossRef]
- Li, T.; Sahu, A.K.; Talwalkar, A.; Smith, V. Federated Learning: Challenges, Methods, and Future Directions. IEEE Signal Process. Mag. 2020, 37, 50–60. [Google Scholar] [CrossRef]
- Nguyen, D.C.; Ding, M.; Pathirana, P.N.; Seneviratne, A.; Li, J.; Poor, H.V. Federated Learning for Internet of Things: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2021, 23, 1622–1658. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Drone Small Cells in the Clouds: Design, Deployment and Performance Analysis. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Khalil, M.I. Energy Efficiency Maximization of Relay Aerial Robotic Networks. IEEE Trans. Green Commun. Netw. 2020, 4, 1081–1090. [Google Scholar] [CrossRef]
- Babu, N.; Ntougias, K.; Papadias, C.B.; Popovski, P. Energy Efficient Altitude Optimization of an Aerial Access Point. In Proceedings of the 2020 IEEE 31st Annual International Symposium on Personal, Indoor and Mobile Radio Communications, London, UK, 31 August–3 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Wang, L.; Hu, B.; Chen, S. Energy Efficient Placement of a Drone Base Station for Minimum Required Transmit Power. IEEE Wirel. Commun. Lett. 2020, 9, 2010–2014. [Google Scholar] [CrossRef]
- Chou, S.F.; Pang, A.C.; Yu, Y.J. Energy-Aware 3D Unmanned Aerial Vehicle Deployment for Network Throughput Optimization. IEEE Trans. Wirel. Commun. 2020, 19, 563–578. [Google Scholar] [CrossRef]
- Bera, A.; Misra, S.; Chatterjee, C. Energy-Aware Multi-UAV Networks for On-Demand Task Execution. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Lu, J.; Wan, S.; Chen, X.; Fan, P. Energy-Efficient 3D UAV-BS Placement versus Mobile Users’ Density and Circuit Power. In Proceedings of the 2017 IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Babu, N.; Papadias, C.B.; Popovski, P. Energy-Efficient Deployment of a Non-Orthogonal Multiple Access Unmanned Aerial System. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Xue, Z.; Wang, J.; Ding, G.; Wu, Q. Joint 3D Location and Power Optimization for UAV-Enabled Relaying Systems. IEEE Access 2018, 6, 43113–43124. [Google Scholar] [CrossRef]
- Shakoor, S.; Kaleem, Z.; Do, D.T.; Dobre, O.A.; Jamalipour, A. Joint Optimization of UAV 3-D Placement and Path-Loss Factor for Energy-Efficient Maximal Coverage. IEEE Internet Things J. 2021, 8, 9776–9786. [Google Scholar] [CrossRef]
- Zorbas, D.; Pugliese, L.D.P.; Razafindralambo, T.; Guerriero, F. Optimal drone placement and cost-efficient target coverage. J. Netw. Comput. Appl. 2016, 75, 16–31. [Google Scholar] [CrossRef]
- Jiang, X.; Wu, Z.; Yin, Z.; Yang, Z.; Zhao, N. Power Consumption Minimization of UAV Relay in NOMA Networks. IEEE Wirel. Commun. Lett. 2020, 9, 666–670. [Google Scholar] [CrossRef]
- Bahr, A.; Mehaseb, M.A.; Doliel, S.A.; El-Rabaie, S.; Abd El-Samie, F.E. Power-Aware 3D UAV Placement for IoT Emergency Communications. In Proceedings of the 2020 8th International Japan-Africa Conference on Electronics, Communications, and Computations (JAC-ECC), Virtual, 14–15 December 2020; pp. 18–23. [Google Scholar] [CrossRef]
- Cui, J.; Shakhatreh, H.; Hu, B.; Chen, S.; Wang, C. Power-Efficient Deployment of a UAV for Emergency Indoor Wireless Coverage. IEEE Access 2018, 6, 73200–73209. [Google Scholar] [CrossRef]
- Pandey, A.; Kushwaha, D.; Kumar, S. Energy Efficient UAV Placement for Multiple Users in IoT Networks. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Bozkaya, E.; Foerster, K.T.; Schmid, S.; Canberk, B. AirNet: Energy-Aware Deployment and Scheduling of Aerial Networks. IEEE Trans. Veh. Technol. 2020, 69, 12252–12263. [Google Scholar] [CrossRef]
- Sohail, M.F.; Leow, C.Y.; Won, S. Energy-Efficient Non-Orthogonal Multiple Access for UAV Communication System. IEEE Trans. Veh. Technol. 2019, 68, 10834–10845. [Google Scholar] [CrossRef]
- Zhang, R.; Pang, X.; Tang, J.; Chen, Y.; Zhao, N.; Wang, X. Joint Location and Transmit Power Optimization for NOMA-UAV Networks via Updating Decoding Order. IEEE Wirel. Commun. Lett. 2021, 10, 136–140. [Google Scholar] [CrossRef]
- Pang, X.; Tang, J.; Zhao, N.; Zhang, X.; Qian, Y. Energy-efficient design for mmWave-enabled NOMA-UAV networks. Sci. China Inf. Sci. 2021, 64, 1–14. [Google Scholar] [CrossRef]
- Nouri, N.; Abouei, J.; Sepasian, A.R.; Jaseemuddin, M.; Anpalagan, A.; Plataniotis, K.N. Three-dimensional multi-UAV placement and resource allocation for energy-efficient IoT communication. IEEE Internet Things J. 2021, 9, 2134–2152. [Google Scholar] [CrossRef]
- Albu-Salih, A.T.; Seno, S.A.H. Energy-efficient data gathering framework-based clustering via multiple UAVs in deadline-based WSN applications. IEEE Access 2018, 6, 72275–72286. [Google Scholar] [CrossRef]
- Cheng, S.H.; Shih, Y.T.; Chang, K.C. Proactive Power Control and Position Deployment for Drone Small Cells: Joint Supervised and Unsupervised Learning. IEEE Access 2021, 9, 126735–126747. [Google Scholar] [CrossRef]
- Noh, S.C.; Jeon, H.B.; Chae, C.B. Energy-Efficient Deployment of Multiple UAVs Using Ellipse Clustering to Establish Base Stations. IEEE Wirel. Commun. Lett. 2020, 9, 1155–1159. [Google Scholar] [CrossRef]
- Zhang, Q.; Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Machine Learning for Predictive On-Demand Deployment of UAVs for Wireless Communications. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, Y.; Fu, S.; Liu, X. Reduce UAV Coverage Energy Consumption through Actor-Critic Algorithm. In Proceedings of the 2019 15th International Conference on Mobile Ad-Hoc and Sensor Networks (MSN), Shenzhen, China, 11–13 December 2019; pp. 332–337. [Google Scholar] [CrossRef]
- Song, Q.; Jin, S.; Zheng, F.C. Completion Time and Energy Consumption Minimization for UAV-Enabled Multicasting. IEEE Wirel. Commun. Lett. 2019, 8, 821–824. [Google Scholar] [CrossRef]
- Tran, D.H.; Vu, T.X.; Chatzinotas, S.; ShahbazPanahi, S.; Ottersten, B. Coarse Trajectory Design for Energy Minimization in UAV-Enabled. IEEE Trans. Veh. Technol. 2020, 69, 9483–9496. [Google Scholar] [CrossRef]
- Jing, X.; Sun, J.; Masouros, C. Energy Aware Trajectory Optimization for Aerial Base Stations. IEEE Trans. Commun. 2021, 69, 3352–3366. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; He, Q.; Bian, K.; Song, L. Joint Trajectory and Power Optimization for UAV Relay Networks. IEEE Commun. Lett. 2018, 22, 161–164. [Google Scholar] [CrossRef]
- Yang, D.; Wu, Q.; Zeng, Y.; Zhang, R. Energy Tradeoff in Ground-to-UAV Communication via Trajectory Design. IEEE Trans. Veh. Technol. 2018, 67, 6721–6726. [Google Scholar] [CrossRef]
- Hua, M.; Wang, Y.; Wu, Q.; Dai, H.; Huang, Y.; Yang, L. Energy-Efficient Cooperative Secure Transmission in Multi-UAV-Enabled Wireless Networks. IEEE Trans. Veh. Technol. 2019, 68, 7761–7775. [Google Scholar] [CrossRef]
- Huang, J.; Shan, F.; Xiong, R.; Shao, Y.; Luo, J. Energy-Efficient UAV Flight Planning for a General PoI-Visiting Problem with a Practical Energy Model. In Proceedings of the 2021 International Conference on Computer Communications and Networks (ICCCN), Athens, Greece, 19–22 July 2021; pp. 1–10. [Google Scholar] [CrossRef]
- Jiang, X.; Wu, Z.; Yin, Z.; Yang, Z. Joint Power and Trajectory Design for UAV-Relayed Wireless Systems. IEEE Wirel. Commun. Lett. 2019, 8, 697–700. [Google Scholar] [CrossRef]
- Wang, H.; Ren, G.; Chen, J.; Ding, G.; Yang, Y. Unmanned Aerial Vehicle-Aided Communications: Joint Transmit Power and Trajectory Optimization. IEEE Wirel. Commun. Lett. 2018, 7, 522–525. [Google Scholar] [CrossRef]
- Cui, M.; Zhang, G.; Wu, Q.; Ng, D.W.K. Robust Trajectory and Transmit Power Design for Secure UAV Communications. IEEE Trans. Veh. Technol. 2018, 67, 9042–9046. [Google Scholar] [CrossRef]
- Khamidehi, B.; Sousa, E.S. Power Efficient Trajectory Optimization for the Cellular-Connected Aerial Vehicles. In Proceedings of the 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 8–11 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Hong, Y.W.P.; Cheng, R.H.; Hsiao, Y.C.; Sheu, J.P. Power-Efficient Trajectory Adjustment and Temporal Routing for Multi-UAV Networks. IEEE Trans. Green Commun. Netw. 2020, 4, 1106–1119. [Google Scholar] [CrossRef]
- Xiang, L.; Lei, L.; Chatzinotas, S.; Ottersten, B.; Schober, R. Towards Power-Efficient Aerial Communications via Dynamic Multi-UAV Cooperation. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Republic of Korea, 25–28 May 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Lee, J.; Friderikos, V. Energy Consumption Fairness for Multiple Flying Base Stations. In Proceedings of the 2020 IEEE 31st Annual International Symposium on Personal, Indoor and Mobile Radio Communications, London, UK, 31 August–3 September 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Gao, Y.; Tang, H.; Li, B.; Yuan, X. Energy Minimization for Robust Secure Transmission in UAV Networks With Multiple Colluding Eavesdroppers. IEEE Commun. Lett. 2021, 25, 2353–2357. [Google Scholar] [CrossRef]
- Dong, F.; Li, L.; Lu, Z.; Pan, Q.; Zheng, W. Energy-Efficiency for Fixed-Wing UAV-Enabled Data Collection and Forwarding. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Bian, H.; Dai, H.; Yang, L. Throughput and energy efficiency maximization for UAV-assisted vehicular networks. Phys. Commun. 2020, 42, 101136. [Google Scholar] [CrossRef]
- Eom, S.; Lee, H.; Park, J.; Lee, I. UAV-Aided Wireless Communication Designs With Propulsion Energy Limitations. IEEE Trans. Veh. Technol. 2020, 69, 651–662. [Google Scholar] [CrossRef]
- Miao, J.; Li, H.; Zheng, Z.; Wang, C. Secrecy Energy Efficiency Maximization for UAV Swarm Assisted Multi-Hop Relay System: Joint Trajectory Design and Power Control. IEEE Access 2021, 9, 37784–37799. [Google Scholar] [CrossRef]
- Sun, Z.; Yang, D.; Xiao, L.; Cuthbert, L.; Wu, F.; Zhu, Y. Joint Energy and Trajectory Optimization for UAV-Enabled Relaying Network With Multi-Pair Users. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 939–954. [Google Scholar] [CrossRef]
- Dai, R.; Fotedar, S.; Radmanesh, M.; Kumar, M. Quality-aware UAV coverage and path planning in geometrically complex environments. Ad Hoc Netw. 2018, 73, 95–105. [Google Scholar] [CrossRef]
- Xu, Y.; Xiao, L.; Yang, D.; Cuthbert, L.; Wang, Y. Energy-efficient UAV communication with multiple GTs based on trajectory optimization. Mob. Inf. Syst. 2018, 2018. [Google Scholar] [CrossRef]
- Liu, C.H.; Ma, X.; Gao, X.; Tang, J. Distributed Energy-Efficient Multi-UAV Navigation for Long-Term Communication Coverage by Deep Reinforcement Learning. IEEE Trans. Mob. Comput. 2020, 19, 1274–1285. [Google Scholar] [CrossRef]
- Cong, J.; Li, B.; Guo, X.; Zhang, R. Energy Management Strategy based on Deep Q-network in the Solar-powered UAV Communications System. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Ding, R.; Gao, F.; Shen, X.S. 3D UAV Trajectory Design and Frequency Band Allocation for Energy-Efficient and Fair Communication: A Deep Reinforcement Learning Approach. IEEE Trans. Wirel. Commun. 2020, 19, 7796–7809. [Google Scholar] [CrossRef]
- Zhao, C.; Liu, J.; Sheng, M.; Teng, W.; Zheng, Y.; Li, J. Multi-UAV Trajectory Planning for Energy-Efficient Content Coverage: A Decentralized Learning-Based Approach. IEEE J. Sel. Areas Commun. 2021, 39, 3193–3207. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory Design and Power Control for Multi-UAV Assisted Wireless Networks: A Machine Learning Approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef]
- Amrallah, A.; Mohamed, E.M.; Tran, G.K.; Sakaguchi, K. UAV Trajectory Optimization in a Post-Disaster Area Using Dual Energy-Aware Bandits. Sensors 2023, 23, 1402. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.; Wang, T.; Wang, S. UAV-Assisted Emergency Communications: An Extended Multi-Armed Bandit Perspective. IEEE Commun. Lett. 2019, 23, 938–941. [Google Scholar] [CrossRef]
- Mukherjee, A.; Misra, S.; Chandra, V.S.P.; Obaidat, M.S. Resource-Optimized Multiarmed Bandit-Based Offload Path Selection in Edge UAV Swarms. IEEE Internet Things J. 2019, 6, 4889–4896. [Google Scholar] [CrossRef]
- Fan, W.; Luo, K.; Yu, S.; Zhou, Z.; Chen, X. AoI-driven Fresh Situation Awareness by UAV Swarm: Collaborative DRL-based Energy-Efficient Trajectory Control and Data Processing. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China (ICCC), Chongqing, China, 9-11 August 2020; pp. 841–846. [Google Scholar] [CrossRef]
- Abeywickrama, H.V.; He, Y.; Dutkiewicz, E.; Jayawickrama, B.A.; Mueck, M. A Reinforcement Learning Approach for Fair User Coverage Using UAV Mounted Base Stations Under Energy Constraints. IEEE Open J. Veh. Technol. 2020, 1, 67–81. [Google Scholar] [CrossRef]
- Hajijamali Arani, A.; Azari, M.M.; Hu, P.; Zhu, Y.; Yanikomeroglu, H.; Safavi-Naeini, S. Reinforcement Learning for Energy-Efficient Trajectory Design of UAVs. IEEE Internet Things J. 2022, 9, 9060–9070. [Google Scholar] [CrossRef]
- Yu, J.; Zhu, Y.; Zhao, H.; Cepeda-Lopez, R.; Dagiuklas, T.; Gao, Y. Dynamic Coverage Path Planning of Energy Optimization in UAV-enabled Edge Computing Networks. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), Nanjing, China, 29 March 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Deng, C.; Xu, W.; Lee, C.H.; Gao, H.; Xu, W.; Feng, Z. Energy Efficient UAV-Enabled Multicast Systems: Joint Grouping and Trajectory Optimization. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Big Island, HI, USA, 9–13 December 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Cui, Y.; Deng, D.; Wang, C.; Wang, W. Joint Trajectory and Power Optimization for Energy Efficient UAV Communication Using Deep Reinforcement Learning. In Proceedings of the IEEE INFOCOM 2021—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Virtually, 9–12 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Ruan, L.; Wang, J.; Chen, J.; Xu, Y.; Yang, Y.; Jiang, H.; Zhang, Y.; Xu, Y. Energy-efficient multi-UAV coverage deployment in UAV networks: A game-theoretic framework. China Commun. 2018, 15, 194–209. [Google Scholar] [CrossRef]
- Jia, M.; Gao, Q.; Guo, Q.; Gu, X. Energy-Efficiency Power Allocation Design for UAV-Assisted Spatial NOMA. IEEE Internet Things J. 2021, 8, 15205–15215. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, J.; Long, K.; Nallanathan, A.; Leung, V.C.M. Resource Allocation for Energy Efficient NOMA UAV Network under Imperfect CSI. In Proceedings of the ICC 2020—2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, C.; Shi, S.; GU, S.; Zhang, N.; GU, X. Energy Efficient Resource Allocation and Trajectory Design for Multi-UAV-Enabled Wireless Networks. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, G.; Zhang, H.; Kang, W.; Karagiannidis, G.K.; Nallanathan, A. Energy-Efficient Resource Allocation and Trajectory Design for UAV Relaying Systems. IEEE Trans. Commun. 2020, 68, 6483–6498. [Google Scholar] [CrossRef]
- Xu, K.; Zhao, M.M.; Cai, Y.; Hanzo, L. Low-Complexity Joint Power Allocation and Trajectory Design for UAV-Enabled Secure Communications With Power Splitting. IEEE Trans. Commun. 2021, 69, 1896–1911. [Google Scholar] [CrossRef]
- Cai, Y.; Wei, Z.; Li, R.; Kwan Ng, D.W.; Yuan, J. Energy-Efficient Resource Allocation for Secure UAV Communication Systems. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Cai, Y.; Wei, Z.; Hu, S.; Ng, D.W.K.; Yuan, J. Resource Allocation for Power-Efficient IRS-Assisted UAV Communications. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Wang, X.; Feng, W.; Chen, Y.; Ge, N. Power Allocation for UAV Swarm-Enabled Secure Networks Using Large-Scale CSI. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Big Island, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Yu, X.; Yao, J.; Ruan, L.; Yao, K.; Liu, D.; Chen, R. 3D Deployment of Multi-UAV for Energy-Saving: A Game-Based Learning Approach. In Proceedings of the 2019 IEEE 5th International Conference on Computer and Communications (ICCC), Chengdu, China, 6–9 December 2019; pp. 1332–1337. [Google Scholar] [CrossRef]
- Masaracchia, A.; Nguyen, L.D.; Duong, T.Q.; Yin, C.; Dobre, O.A.; Garcia-Palacios, E. Energy-Efficient and Throughput Fair Resource Allocation for TS-NOMA UAV-Assisted Communications. IEEE Trans. Commun. 2020, 68, 7156–7169. [Google Scholar] [CrossRef]
- Li, M.; Cheng, N.; Gao, J.; Wang, Y.; Zhao, L.; Shen, X. Energy-Efficient UAV-Assisted Mobile Edge Computing: Resource Allocation and Trajectory Optimization. IEEE Trans. Veh. Technol. 2020, 69, 3424–3438. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Y.; Liu, M.; Sun, R.; Chen, Y.; Yuan, J.; Li, J. Energy efficient resource allocation for UAV-assisted space-air-ground Internet of remote things networks. IEEE Access 2019, 7, 145348–145362. [Google Scholar] [CrossRef]
- Ei, N.N.; Kang, S.W.; Alsenwi, M.; Tun, Y.K.; Hong, C.S. Multi-UAV-assisted MEC system: Joint association and resource management framework. In Proceedings of the 2021 International Conference on Information Networking (ICOIN), Jeju Island, Republic of Korea, 13–16 January 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 213–218. [Google Scholar]
- Ramzan, M.R.; Naeem, M.; Altaf, M.; Ejaz, W. Multicriterion Resource Management in Energy-Harvested Cooperative UAV-Enabled IoT Networks. IEEE Internet Things J. 2021, 9, 2944–2959. [Google Scholar] [CrossRef]
- de Paula Parisotto, R.; Klaine, P.V.; Nadas, J.P.B.; Souza, R.D.; Brante, G.; Imran, M.A. Drone Base Station Positioning and Power Allocation using Reinforcement Learning. In Proceedings of the 2019 16th International Symposium on Wireless Communication Systems (ISWCS), Oulu, Finland, 27–30 August 2019; pp. 213–217. [Google Scholar] [CrossRef]
- Zhao, N.; Liu, Z.; Cheng, Y. Multi-Agent Deep Reinforcement Learning for Trajectory Design and Power Allocation in Multi-UAV Networks. IEEE Access 2020, 8, 139670–139679. [Google Scholar] [CrossRef]
- Li, L.; Cheng, Q.; Xue, K.; Yang, C.; Han, Z. Downlink Transmit Power Control in Ultra-Dense UAV Network Based on Mean Field Game and Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2020, 69, 15594–15605. [Google Scholar] [CrossRef]
- Yang, Z.; Pan, C.; Wang, K.; Shikh-Bahaei, M. Energy Efficient Resource Allocation in UAV-Enabled Mobile Edge Computing Networks. IEEE Trans. Wirel. Commun. 2019, 18, 4576–4589. [Google Scholar] [CrossRef]
- Kim, H.; Park, J.; Bennis, M.; Kim, S.L. Massive UAV-to-Ground Communication and its Stable Movement Control: A Mean-Field Approach. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Han, D.; Chen, W.; Liu, J. Energy-Efficient UAV Communications Under Stochastic Trajectory: A Markov Decision Process Approach. IEEE Trans. Green Commun. Netw. 2021, 5, 106–118. [Google Scholar] [CrossRef]
- Xiao, L.; Xu, Y.; Yang, D.; Zeng, Y. Secrecy Energy Efficiency Maximization for UAV-Enabled Mobile Relaying. IEEE Trans. Green Commun. Netw. 2020, 4, 180–193. [Google Scholar] [CrossRef]
- Yang, H.; Xie, X. Energy-Efficient Joint Scheduling and Resource Management for UAV-Enabled Multicell Networks. IEEE Syst. J. 2020, 14, 363–374. [Google Scholar] [CrossRef]
- Koulali, S.; Sabir, E.; Taleb, T.; Azizi, M. A green strategic activity scheduling for UAV networks: A sub-modular game perspective. IEEE Commun. Mag. 2016, 54, 58–64. [Google Scholar] [CrossRef]
- Mkiramweni, M.E.; Yang, C. Energy Efficiency Optimization for Wireless Unmanned Aerial Vehicle Communication Networks: A Bargaining Game Approach. In Proceedings of the 2018 10th International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 18–20 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Luan, H.; Xu, Y.; Liu, D.; Du, Z.; Qian, H.; Liu, X.; Tong, X. Energy Efficient Task Cooperation for Multi-UAV Networks: A Coalition Formation Game Approach. IEEE Access 2020, 8, 149372–149384. [Google Scholar] [CrossRef]
- Yuan, Y.; Lei, L.; Vu, T.X.; Chatzinotas, S.; Ottersten, B. Actor-Critic Deep Reinforcement Learning for Energy Minimization in UAV-Aided Networks. In Proceedings of the 2020 European Conference on Networks and Communications (EuCNC), Dubrovnik, Croatia, 15–18 June 2020; pp. 348–352. [Google Scholar] [CrossRef]
- Yuan, Y.; Lei, L.; Vu, T.X.; Chatzinotas, S.; Sun, S.; Ottersten, B. Energy Minimization in UAV-Aided Networks: Actor-Critic Learning for Constrained Scheduling Optimization. IEEE Trans. Veh. Technol. 2021, 70, 5028–5042. [Google Scholar] [CrossRef]
- Gangula, R.; Gesbert, D.; Kuelzer, D.F.; Franceschi, J.M. A Landing Spot Approach for Enhancing the Performance of UAV-Aided Wireless Networks. In Proceedings of the 2018 IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Muntaha, S.T.; Hassan, S.A.; Jung, H.; Hossain, M.S. Energy Efficiency and Hover Time Optimization in UAV-Based HetNets. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5103–5111. [Google Scholar] [CrossRef]
- Manzoor, A.; Kim, D.H.; Hong, C.S. Energy Efficient Resource Allocation in UAV-based Heterogeneous Networks. In Proceedings of the 2019 20th Asia-Pacific Network Operations and Management Symposium (APNOMS), Matsue, Japan, 18–20 September 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Manzoor, A.; Kim, K.; Pandey, S.R.; Kazmi, S.M.A.; Tran, N.H.; Saad, W.; Hong, C.S. Ruin Theory for Energy-Efficient Resource Allocation in UAV-Assisted Cellular Networks. IEEE Trans. Commun. 2021, 69, 3943–3956. [Google Scholar] [CrossRef]
- Pliatsios, D.; Sarigiannidis, P.; Goudos, S.K.; Psannis, K. 3D Placement of Drone-Mounted Remote Radio Head for Minimum Transmission Power Under Connectivity Constraints. IEEE Access 2020, 8, 200338–200350. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, S. Energy-Efficient UAV Deployment with Flexible Functional Split Selection. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Basar, E.; Di Renzo, M.; De Rosny, J.; Debbah, M.; Alouini, M.S.; Zhang, R. Wireless Communications Through Reconfigurable Intelligent Surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Huang, C.; Zappone, A.; Alexandropoulos, G.C.; Debbah, M.; Yuen, C. Reconfigurable Intelligent Surfaces for Energy Efficiency in Wireless Communication. IEEE Trans. Wirel. Commun. 2019, 18, 4157–4170. [Google Scholar] [CrossRef]
- Li, S.; Duo, B.; Yuan, X.; Liang, Y.C.; Di Renzo, M. Reconfigurable Intelligent Surface Assisted UAV Communication: Joint Trajectory Design and Passive Beamforming. IEEE Wirel. Commun. Lett. 2020, 9, 716–720. [Google Scholar] [CrossRef]
- Yang, L.; Meng, F.; Zhang, J.; Hasna, M.O.; Renzo, M.D. On the Performance of RIS-Assisted Dual-Hop UAV Communication Systems. IEEE Trans. Veh. Technol. 2020, 69, 10385–10390. [Google Scholar] [CrossRef]
- Ranjha, A.; Kaddoum, G. URLLC Facilitated by Mobile UAV Relay and RIS: A Joint Design of Passive Beamforming, Blocklength, and UAV Positioning. IEEE Internet Things J. 2021, 8, 4618–4627. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y. Machine Learning Empowered Trajectory and Passive Beamforming Design in UAV-RIS Wireless Networks. IEEE J. Sel. Areas Commun. 2021, 39, 2042–2055. [Google Scholar] [CrossRef]
- Michailidis, E.T.; Miridakis, N.I.; Michalas, A.; Skondras, E.; Vergados, D.J. Energy optimization in dual-RIS UAV-aided MEC-enabled internet of vehicles. Sensors 2021, 21, 4392. [Google Scholar] [CrossRef]
- Long, H.; Chen, M.; Yang, Z.; Li, Z.; Wang, B.; Yun, X.; Shikh-Bahaei, M. Joint Trajectory and Passive Beamforming Design for Secure UAV Networks with RIS. In Proceedings of the 2020 IEEE Globecom Workshops (GC Wkshps), Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Diamanti, M.; Tsampazi, M.; Tsiropoulou, E.E.; Papavassiliou, S. Energy Efficient Multi-User Communications Aided by Reconfigurable Intelligent Surfaces and UAVs. In Proceedings of the 2021 IEEE International Conference on Smart Computing (SMARTCOMP), Irvine, CA, USA, 23–27 August 2021; pp. 371–376. [Google Scholar] [CrossRef]
- Agrawal, N.; Bansal, A.; Singh, K.; Li, C.P. Performance Evaluation of RIS-Assisted UAV-Enabled Vehicular Communication System With Multiple Non-Identical Interferers. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-Based IoT Platform: A Crowd Surveillance Use Case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef]
- Wu, G.; Miao, Y.; Zhang, Y.; Barnawi, A. Energy efficient for UAV-enabled mobile edge computing networks: Intelligent task prediction and offloading. Comput. Commun. 2020, 150, 556–562. [Google Scholar] [CrossRef]
- Li, L.; Wen, X.; Lu, Z.; Pan, Q.; Jing, W.; Hu, Z. Energy-efficient UAV-enabled MEC system: Bits allocation optimization and trajectory design. Sensors 2019, 19, 4521. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, J.; Xiong, J.; Zhou, L.; Wei, J. Energy-Efficient Multi-UAV-Enabled Multiaccess Edge Computing Incorporating NOMA. IEEE Internet Things J. 2020, 7, 5613–5627. [Google Scholar] [CrossRef]
- Bai, T.; Wang, J.; Ren, Y.; Hanzo, L. Energy-Efficient Computation Offloading for Secure UAV-Edge-Computing Systems. IEEE Trans. Veh. Technol. 2019, 68, 6074–6087. [Google Scholar] [CrossRef]
- Chen, L.; Zhao, R.; He, K.; Zhao, Z.; Fan, L. Intelligent ubiquitous computing for future UAV-enabled MEC network systems. Clust. Comput. 2021, 25, 2417–2427. [Google Scholar] [CrossRef]
- Du, Y.; Yang, K.; Wang, K.; Zhang, G.; Zhao, Y.; Chen, D. Joint Resources and Workflow Scheduling in UAV-Enabled Wirelessly-Powered MEC for IoT Systems. IEEE Trans. Veh. Technol. 2019, 68, 10187–10200. [Google Scholar] [CrossRef]
- Faraci, G.; Grasso, C.; Schembra, G. Design of a 5G Network Slice Extension With MEC UAVs Managed With Reinforcement Learning. IEEE J. Sel. Areas Commun. 2020, 38, 2356–2371. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, Y.; Hu, R.Q.; Qian, Y. Computation Rate Maximization in UAV-Enabled Wireless-Powered Mobile-Edge Computing Systems. IEEE J. Sel. Areas Commun. 2018, 36, 1927–1941. [Google Scholar] [CrossRef]
- Jeong, S.; Simeone, O.; Kang, J. Mobile Edge Computing via a UAV-Mounted Cloudlet: Optimization of Bit Allocation and Path Planning. IEEE Trans. Veh. Technol. 2018, 67, 2049–2063. [Google Scholar] [CrossRef]
- Yi, B.; Wang, X.; Li, K.; Huang, M. A comprehensive survey of network function virtualization. Comput. Netw. 2018, 133, 212–262. [Google Scholar] [CrossRef]
- Tipantuña, C.; Hesselbach, X.; Sánchez-Aguero, V.; Valera, F.; Vidal, I.; Nogales, B. An NFV-based energy scheduling algorithm for a 5G enabled fleet of programmable unmanned aerial vehicles. Wirel. Commun. Mob. Comput. 2019, 2019, 4734821. [Google Scholar] [CrossRef]
- Xu, Z.; Petrunin, I.; Tsourdos, A. Dynamic Spectrum Management with Network Function Virtualization for UAV Communication. J. Intell. Robot. Syst. 2021, 101, 40. [Google Scholar] [CrossRef]
- Nogales, B.; Sanchez-Aguero, V.; Vidal, I.; Valera, F. Adaptable and automated small uav deployments via virtualization. Sensors 2018, 18, 4116. [Google Scholar] [CrossRef]
- Sami Oubbati, O.; Atiquzzaman, M.; Ahamed Ahanger, T.; Ibrahim, A. Softwarization of UAV Networks: A Survey of Applications and Future Trends. IEEE Access 2020, 8, 98073–98125. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, W.; Zheng, G. Optimum Placement of UAV as Relays. IEEE Commun. Lett. 2018, 22, 248–251. [Google Scholar] [CrossRef]
- Azari, M.M.; Rosas, F.; Chen, K.C.; Pollin, S. Ultra Reliable UAV Communication Using Altitude and Cooperation Diversity. IEEE Trans. Commun. 2018, 66, 330–344. [Google Scholar] [CrossRef]
- Yin, S.; Zhao, Y.; Li, L.; Yu, F.R. UAV-Assisted Cooperative Communications With Time-Sharing Information and Power Transfer. IEEE Trans. Veh. Technol. 2020, 69, 1554–1567. [Google Scholar] [CrossRef]
- Thammawichai, M.; Baliyarasimhuni, S.P.; Kerrigan, E.C.; Sousa, J.B. Optimizing Communication and Computation for Multi-UAV Information Gathering Applications. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 601–615. [Google Scholar] [CrossRef]
- Laneman, J.; Tse, D.; Wornell, G. Cooperative diversity in wireless networks: Efficient protocols and outage behavior. IEEE Trans. Inf. Theory 2004, 50, 3062–3080. [Google Scholar] [CrossRef]
- Letaief, K.B.; Zhang, W. Cooperative Communications for Cognitive Radio Networks. Proc. IEEE 2009, 97, 878–893. [Google Scholar] [CrossRef]
- Ho, D.T.; Grøtli, E.I.; Sujit, P.; Johansen, T.A.; De Sousa, J.B. Performance evaluation of cooperative relay and Particle Swarm Optimization path planning for UAV and wireless sensor network. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, Georgia, USA, 9–13 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1403–1408. [Google Scholar]
- Nguyen, K.K.; Khosravirad, S.; Da Costa, D.B.; Nguyen, L.D.; Duong, T.Q. Reconfigurable Intelligent Surface-assisted Multi-UAV Networks: Efficient Resource Allocation with Deep Reinforcement Learning. IEEE J. Sel. Top. Signal Process. 2021. [Google Scholar] [CrossRef]
- Huang, J.; Zhou, Y.; Ning, Z.; Gharavi, H. Wireless Power Transfer and Energy Harvesting: Current Status and Future Prospects. IEEE Wirel. Commun. 2019, 26, 163–169. [Google Scholar] [CrossRef]
- Quyen, T.V.; Nguyen, C.V.; Le, A.M.; Nguyen, M.T. Optimizing hybrid energy harvesting mechanisms for UAVs. EAI Endorsed Trans. Energy Web 2020, 7, e8. [Google Scholar] [CrossRef]
- Le, W.; Xue, Z.; Chen, J.; Zhang, Z. Coverage Path Planning Based on the Optimization Strategy of Multiple Solar Powered Unmanned Aerial Vehicles. Drones 2022, 6, 203. [Google Scholar] [CrossRef]
- Wang, H.; Li, P.; Xiao, H.; Zhou, X.; Lei, R. Intelligent energy management for solar-powered unmanned aerial vehicle using multi-objective genetic algorithm. Energy Convers. Manag. 2023, 280, 116805. [Google Scholar] [CrossRef]
- Song, X.; Chang, Z.; Guo, X.; Wu, P.; Hämäläinen, T. Energy efficient optimization for solar-powered UAV communications system. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Yin, S.; Zhao, Y.; Li, L.; Yu, F.R. UAV-Assisted Cooperative Communications With Power-Splitting Information and Power Transfer. IEEE Trans. Green Commun. Netw. 2019, 3, 1044–1057. [Google Scholar] [CrossRef]
- Liu, Q.; Li, M.; Yang, J.; Lv, J.; Hwang, K.; Hossain, M.S.; Muhammad, G. Joint power and time allocation in energy harvesting of UAV operating system. Comput. Commun. 2020, 150, 811–817. [Google Scholar] [CrossRef]
- Lakew, D.S.; Na, W.; Dao, N.N.; Cho, S. Aerial Energy Orchestration for Heterogeneous UAV-Assisted Wireless Communications. IEEE Syst. J. 2021, 16, 2483–2494. [Google Scholar] [CrossRef]
- Yang, L.; Chen, J.; Hasna, M.O.; Yang, H.C. Outage Performance of UAV-Assisted Relaying Systems With RF Energy Harvesting. IEEE Commun. Lett. 2018, 22, 2471–2474. [Google Scholar] [CrossRef]
- Shakeri, R.; Al-Garadi, M.A.; Badawy, A.; Mohamed, A.; Khattab, T.; Al-Ali, A.K.; Harras, K.A.; Guizani, M. Design Challenges of Multi-UAV Systems in Cyber-Physical Applications: A Comprehensive Survey and Future Directions. IEEE Commun. Surv. Tutor. 2019, 21, 3340–3385. [Google Scholar] [CrossRef]
- Mehta, P.; Gupta, R.; Tanwar, S. Blockchain envisioned UAV networks: Challenges, solutions, and comparisons. Comput. Commun. 2020, 151, 518–538. [Google Scholar] [CrossRef]
- Ye, J.; Zhang, C.; Lei, H.; Pan, G.; Ding, Z. Secure UAV-to-UAV Systems With Spatially Random UAVs. IEEE Wirel. Commun. Lett. 2019, 8, 564–567. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y.; Guizani, M. Secure UAV Communication Networks over 5G. IEEE Wirel. Commun. 2019, 26, 114–120. [Google Scholar] [CrossRef]
- Challita, U.; Ferdowsi, A.; Chen, M.; Saad, W. Machine Learning for Wireless Connectivity and Security of Cellular-Connected UAVs. IEEE Wirel. Commun. 2019, 26, 28–35. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Senouci, S.M.; Messous, M.A. How to Detect Cyber-Attacks in Unmanned Aerial Vehicles Network? In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Iqbal, S. A Study on UAV Operating System Security and Future Research Challenges. In Proceedings of the 2021 IEEE 11th Annual Computing and Communication Workshop and Conference (CCWC), Virtual, 27–30 January 2021; pp. 0759–0765. [Google Scholar] [CrossRef]
- Fotohi, R.; Nazemi, E.; Aliee, F.S. An agent-based self-protective method to secure communication between UAVs in unmanned aerial vehicle networks. Veh. Commun. 2020, 26, 100267. [Google Scholar] [CrossRef]
- Hu, Y.C.; Perrig, A.; Johnson, D. Wormhole attacks in wireless networks. IEEE J. Sel. Areas Commun. 2006, 24, 370–380. [Google Scholar] [CrossRef]
- Ren, J.; Zhang, Y.; Zhang, K.; Shen, X. Adaptive and Channel-Aware Detection of Selective Forwarding Attacks in Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2016, 15, 3718–3731. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, M.; Liu, X.; Xiong, N.N.; Liu, A.; Zhu, Y. Design and Analysis of Probing Route to Defense Sink-Hole Attacks for Internet of Things Security. IEEE Trans. Netw. Sci. Eng. 2020, 7, 356–372. [Google Scholar] [CrossRef]
- Sun, X.; Ng, D.W.K.; Ding, Z.; Xu, Y.; Zhong, Z. Physical Layer Security in UAV Systems: Challenges and Opportunities. IEEE Wirel. Commun. 2019, 26, 40–47. [Google Scholar] [CrossRef]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV systems: A survey. Unmanned Syst. 2020, 8, 149–169. [Google Scholar] [CrossRef]
- Tortonesi, M.; Stefanelli, C.; Benvegnu, E.; Ford, K.; Suri, N.; Linderman, M. Multiple-UAV coordination and communications in tactical edge networks. IEEE Commun. Mag. 2012, 50, 48–55. [Google Scholar] [CrossRef]
- Chung, S.J.; Paranjape, A.A.; Dames, P.; Shen, S.; Kumar, V. A Survey on Aerial Swarm Robotics. IEEE Trans. Robot. 2018, 34, 837–855. [Google Scholar] [CrossRef]
- Shen, C.; Chang, T.H.; Gong, J.; Zeng, Y.; Zhang, R. Multi-UAV Interference Coordination via Joint Trajectory and Power Control. IEEE Trans. Signal Process. 2020, 68, 843–858. [Google Scholar] [CrossRef]
- Chung, T.H.; Clement, M.R.; Day, M.A.; Jones, K.D.; Davis, D.; Jones, M. Live-fly, large-scale field experimentation for large numbers of fixed-wing UAVs. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1255–1262. [Google Scholar] [CrossRef]
- Chen, J.; Wu, Q.; Xu, Y.; Zhang, Y.; Yang, Y. Distributed Demand-Aware Channel-Slot Selection for Multi-UAV Networks: A Game-Theoretic Learning Approach. IEEE Access 2018, 6, 14799–14811. [Google Scholar] [CrossRef]
- Abdelkader, M.; Güler, S.; Jaleel, H.; Shamma, J.S. Aerial swarms: Recent applications and challenges. Curr. Robot. Rep. 2021, 2, 309–320. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Zhou, Y.; Cheng, N.; Lu, N.; Shen, X.S. Multi-UAV-Aided Networks: Aerial-Ground Cooperative Vehicular Networking Architecture. IEEE Veh. Technol. Mag. 2015, 10, 36–44. [Google Scholar] [CrossRef]
- Zear, A.; Ranga, V. Path Planning of Unmanned Aerial Vehicles: Current State and Future Challenges. In First International Conference on Sustainable Technologies for Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2020; pp. 409–419. [Google Scholar]
- Almulhem, A. Threat modeling of a multi-UAV system. Transp. Res. Part A: Policy Pract. 2020, 142, 290–295. [Google Scholar] [CrossRef]
- Li, H.; Fang, S.; Mukhopadhyay, S.; Saykin, A.J.; Shen, L. Interactive Machine Learning by Visualization: A Small Data Solution. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 3513–3521. [Google Scholar] [CrossRef]
- Park, B.; Rao, D.L.; Gudivada, V.N. Dangers of Bias in Data-Intensive Information Systems. In Next Generation Information Processing System; Springer: Berlin/Heidelberg, Germany, 2021; pp. 259–271. [Google Scholar]
- Jordan, M.I.; Mitchell, T.M. Machine learning: Trends, perspectives, and prospects. Science 2015, 349, 255–260. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Peng, M.; Zhou, Y.; Huang, Y.; Mao, S. Application of Machine Learning in Wireless Networks: Key Techniques and Open Issues. IEEE Commun. Surv. Tutor. 2019, 21, 3072–3108. [Google Scholar] [CrossRef]
- Deng, L. The MNIST Database of Handwritten Digit Images for Machine Learning Research [Best of the Web]. IEEE Signal Process. Mag. 2012, 29, 141–142. [Google Scholar] [CrossRef]
- Bhola; Lai, C.C.; Wang, L.C. The Outage-Free Replacement Problem in Unmanned Aerial Vehicle Base Stations. IEEE Trans. Veh. Technol. 2021, 70, 13390–13395. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Nguyen, C.V.; Truong, L.H.; Le, A.M.; Quyen, T.V.; Masaracchia, A.; Teague, K.A. Electromagnetic field based wpt technologies for uavs: A comprehensive survey. Electronics 2020, 9, 461. [Google Scholar] [CrossRef]
- Saha, B.; Koshimoto, E.; Quach, C.C.; Hogge, E.F.; Strom, T.H.; Hill, B.L.; Vazquez, S.L.; Goebel, K. Battery health management system for electric UAVs. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011; pp. 1–9. [Google Scholar] [CrossRef]
- Jaafar, W.; Yanikomeroglu, H. Dynamics of Laser-Charged UAVs: A Battery Perspective. IEEE Internet Things J. 2021, 8, 10573–10582. [Google Scholar] [CrossRef]
- Jin, K.; Zhou, W. Wireless Laser Power Transmission: A Review of Recent Progress. IEEE Trans. Power Electron. 2019, 34, 3842–3859. [Google Scholar] [CrossRef]
- Lu, M.; James, A.; Bagheri, M. Unmanned Aerial Vehicle (UAV) charging from powerlines. In Proceedings of the 2017 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Chiang Mai, Thailand, 6–9 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Shah, N.S.M.; Alsamhi, S.H.; Abdullah, Q. Energy-Efficient Tethered UAV Deployment in B5G for Smart Environments and Disaster Recovery. In Proceedings of the 2021 1st International Conference on Emerging Smart Technologies and Applications (eSmarTA), Ibb, Yemen, 25–26 October 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Chen, B.; Yang, M.; Chen, Y.; Ning, Q.; Xie, D. A novel energy harvesting scheme in interference networks with UAVs. Phys. Commun. 2019, 33, 259–265. [Google Scholar] [CrossRef]
- Cansiz, M.; Altinel, D.; Kurt, G.K. Efficiency in RF energy harvesting systems: A comprehensive review. Energy 2019, 174, 292–309. [Google Scholar] [CrossRef]
- Choi, K.W.; Kim, D.I.; Chung, M.Y. Received Power-Based Channel Estimation for Energy Beamforming in Multiple-Antenna RF Energy Transfer System. IEEE Trans. Signal Process. 2017, 65, 1461–1476. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the current state of UAV regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Liu, J.; Shi, Y.; Fadlullah, Z.M.; Kato, N. Space-Air-Ground Integrated Network: A Survey. IEEE Commun. Surv. Tutor. 2018, 20, 2714–2741. [Google Scholar] [CrossRef]
- Yu, J.; Liu, X.; Gao, Y.; Shen, X. 3D Channel Tracking for UAV-Satellite Communications in Space-Air-Ground Integrated Networks. IEEE J. Sel. Areas Commun. 2020, 38, 2810–2823. [Google Scholar] [CrossRef]
- Arani, A.H.; Hu, P.; Zhu, Y. Re-envisioning Space-Air-Ground Integrated Networks: Reinforcement Learning for Link Optimization. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Virtual, 14–23 June 2021; pp. 1–7. [Google Scholar] [CrossRef]








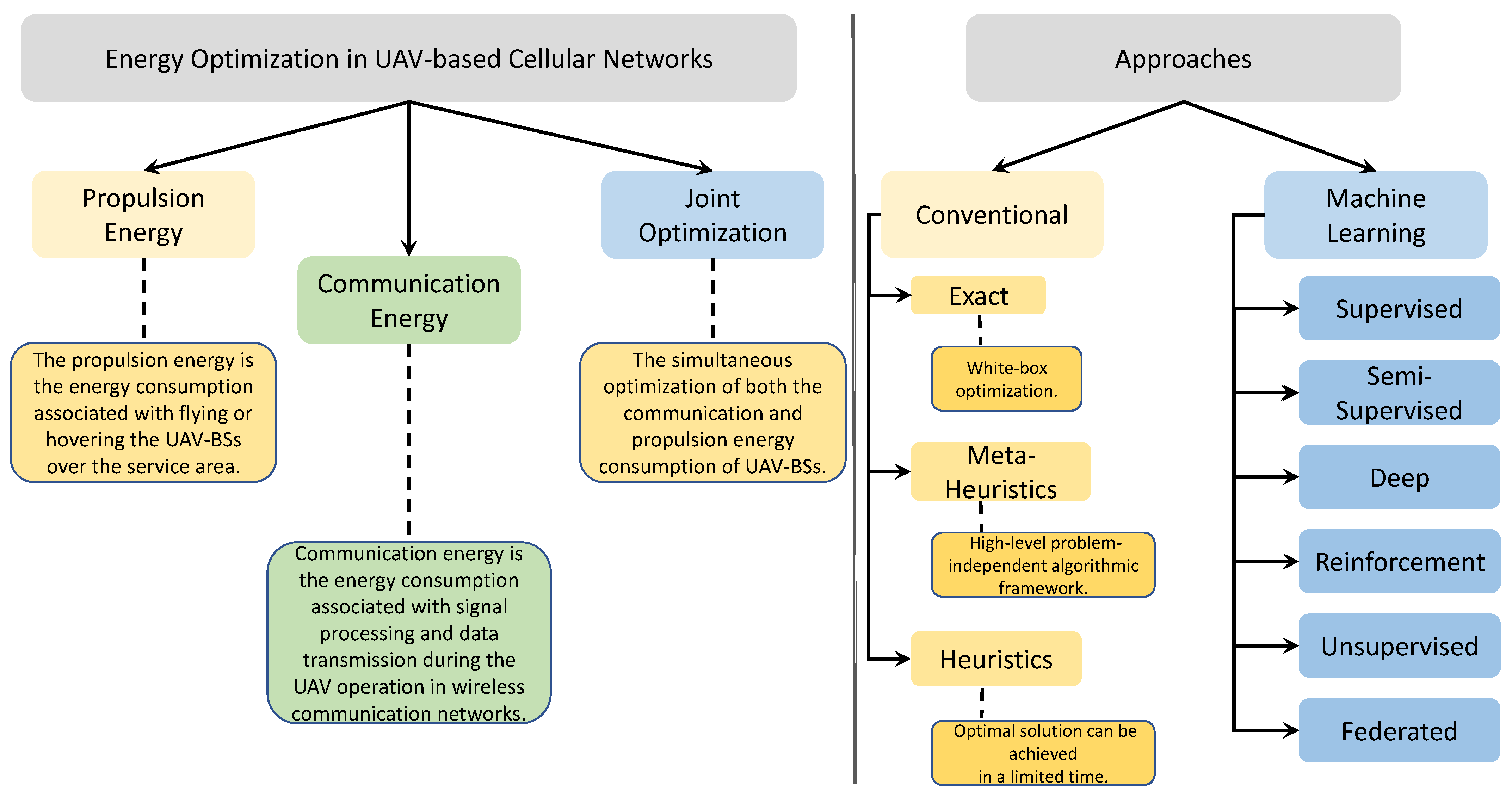{kind=link}
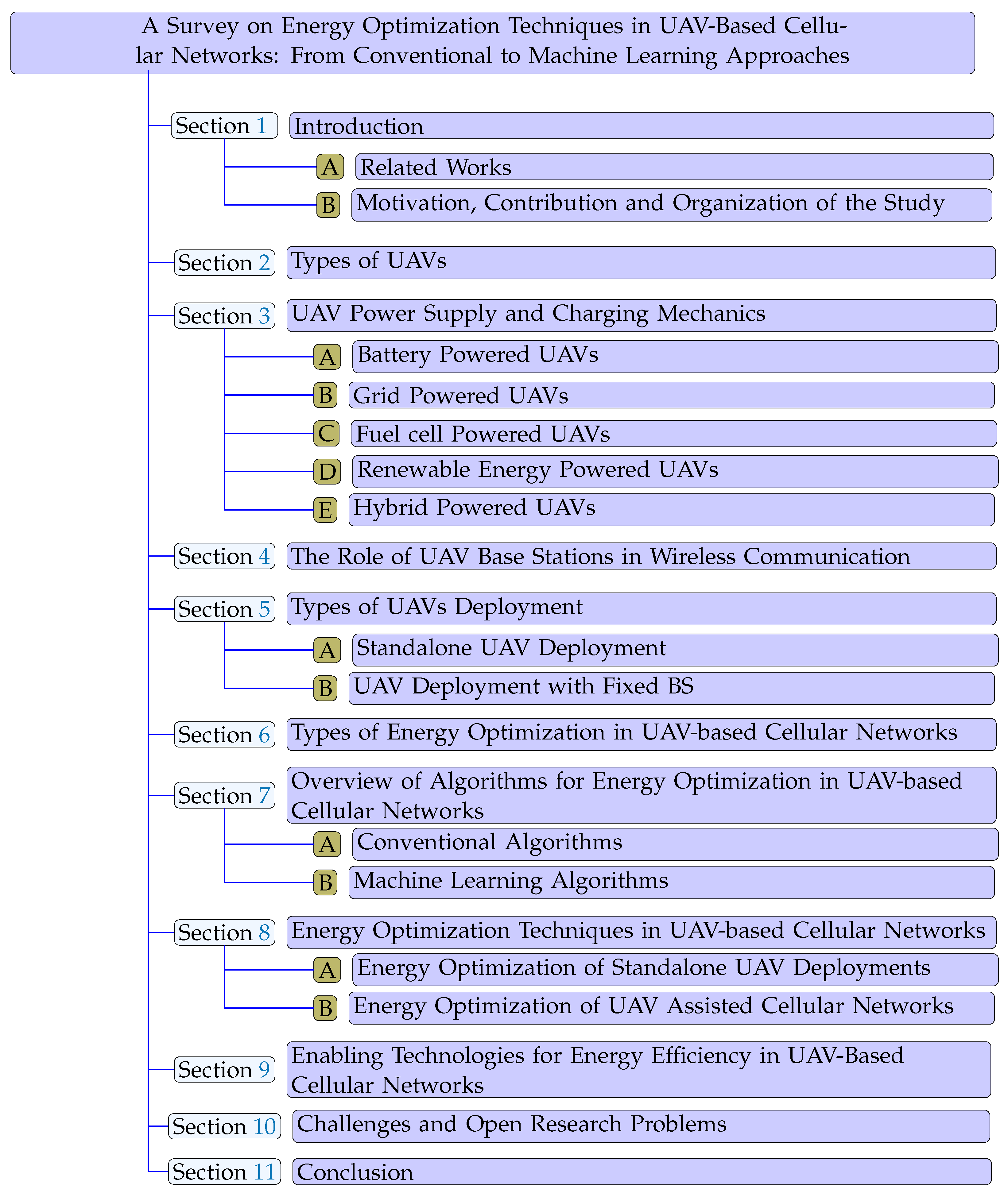{kind=link}
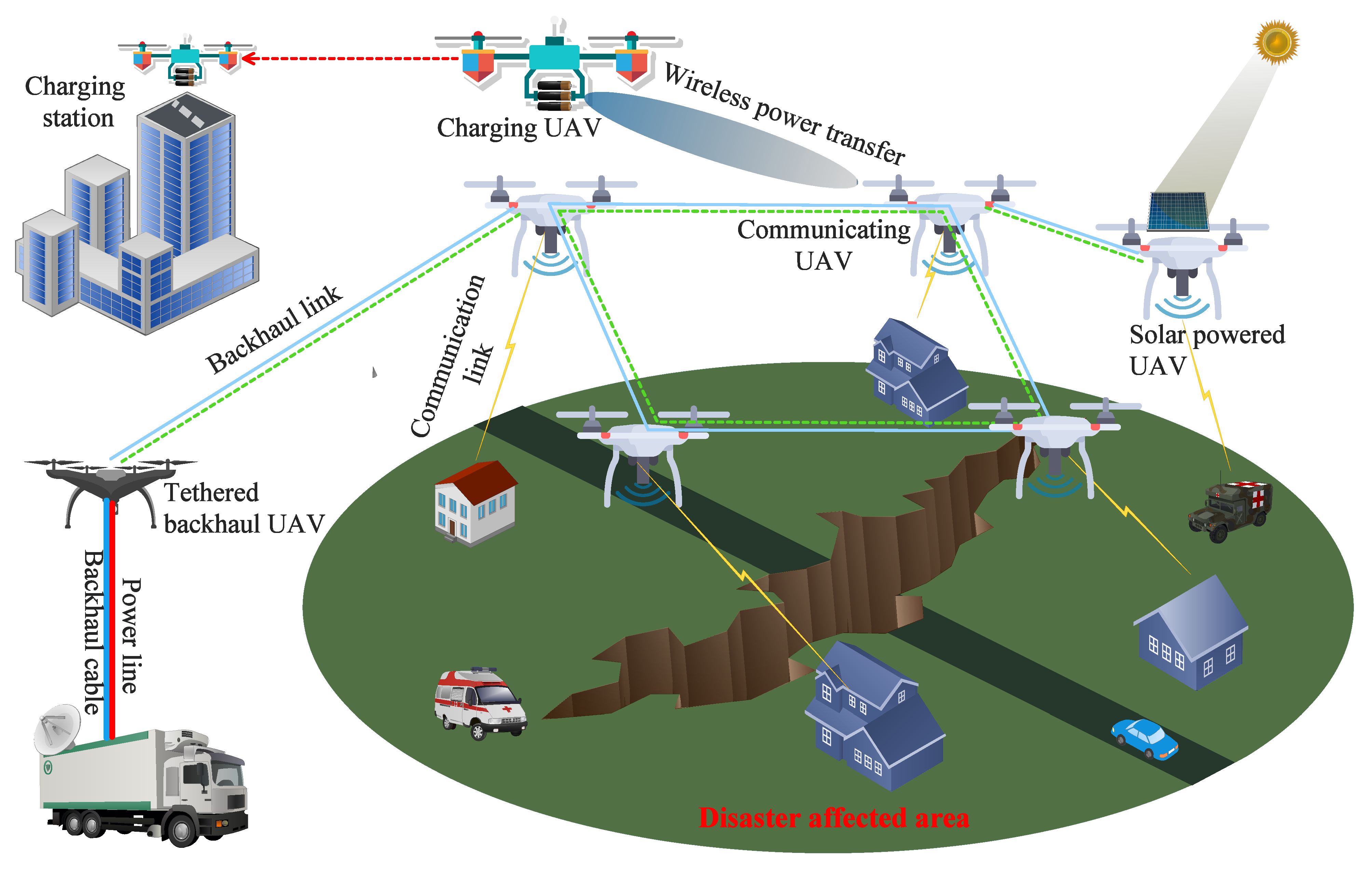{kind=link}
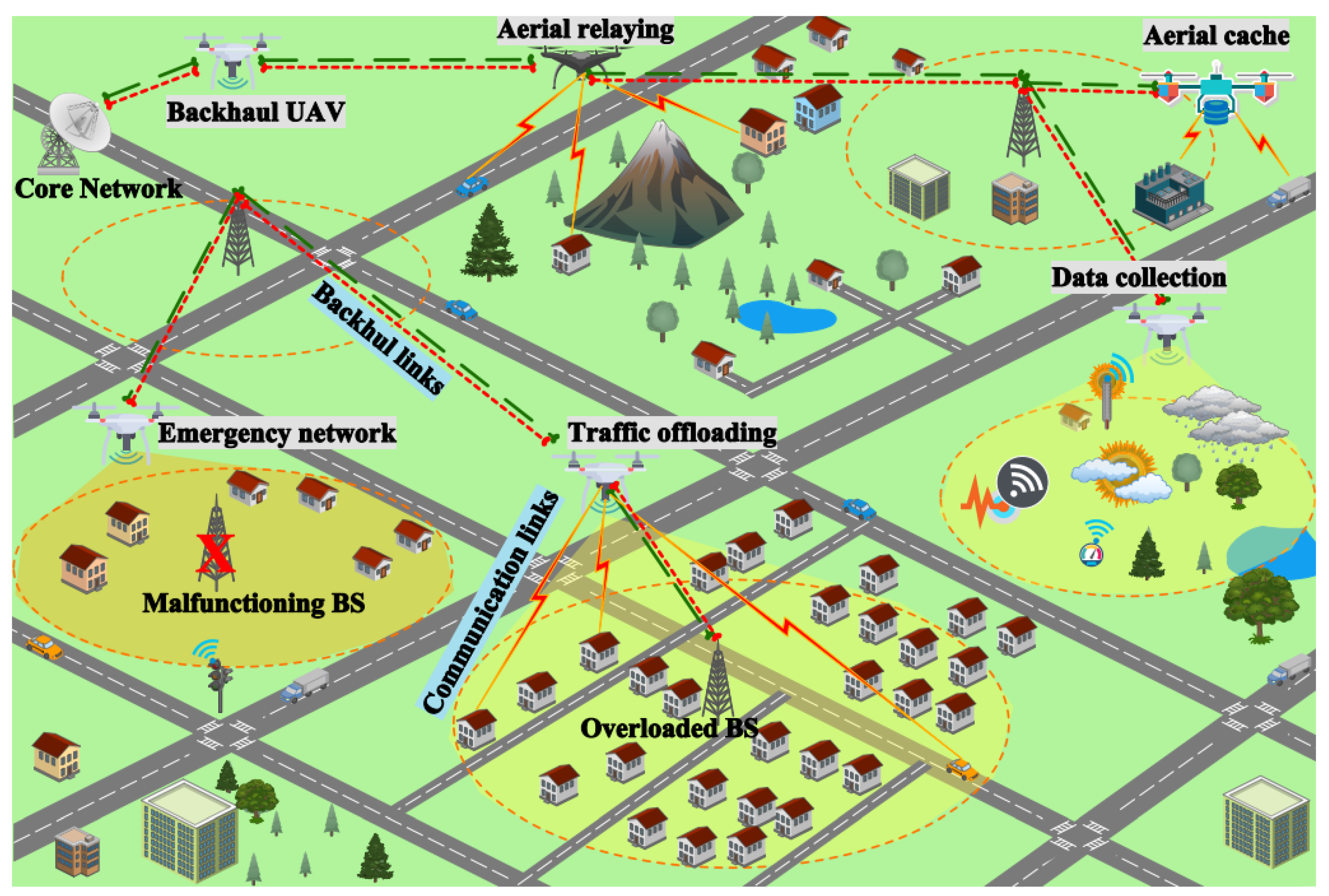{kind=link}
{kind=link}
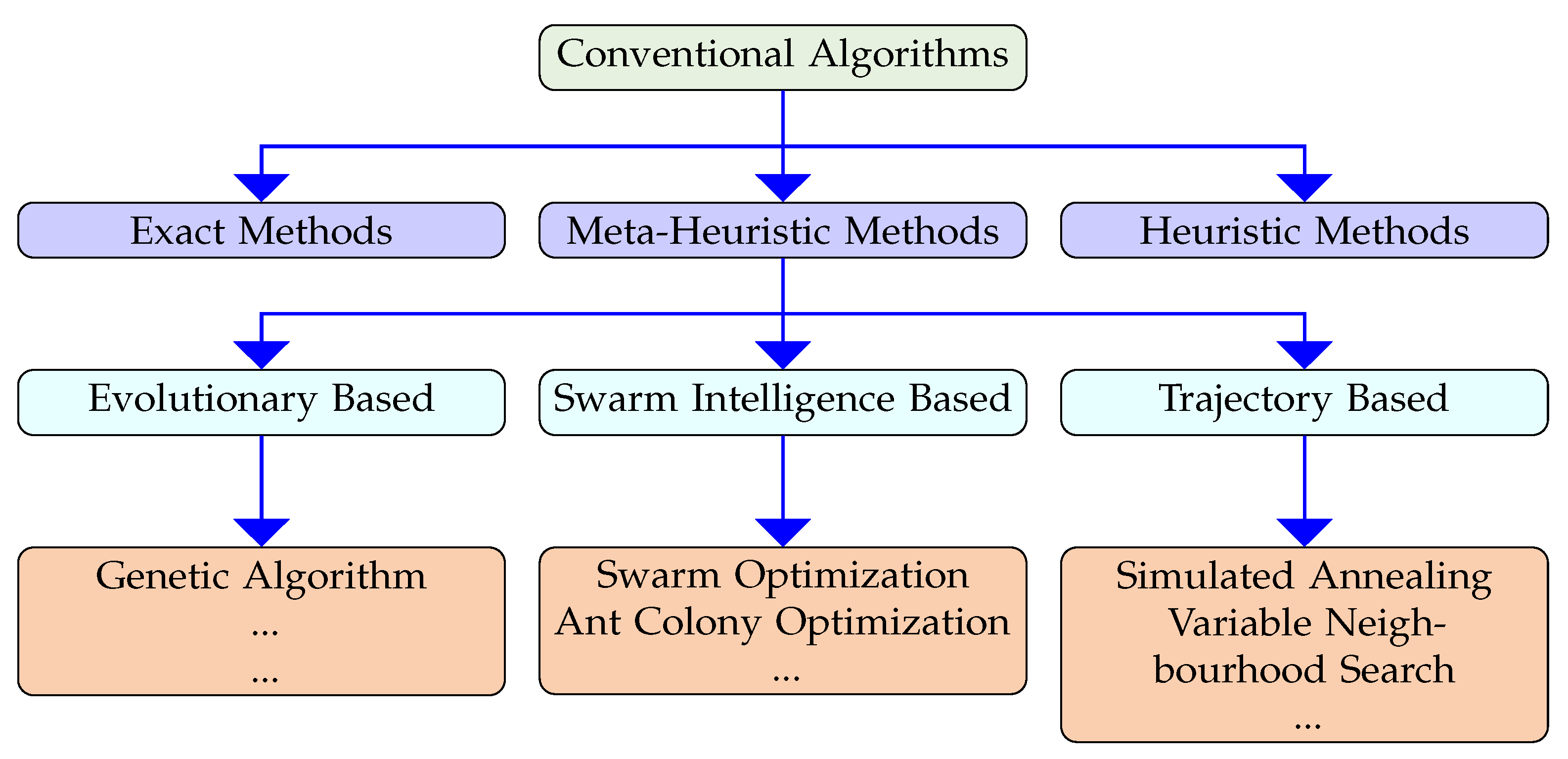{kind=link}
{kind=link}
| Paper | Year | Category | Specific Algorithm | |
|---|---|---|---|---|
| CA | ML | |||
| [116] | 2017 | ✓ | Heuristic | |
| [23] | 2021 | ✓ | Heuristic | |
| [24] | 2019 | ✓ | Heuristic | |
| [178] | 2020 | ✓ | Heuristic | |
| [179] | 2020 | ✓ | Heuristic | |
| [119] | 2020 | ✓ | Heuristic | |
| [180] | 2020 | ✓ | Heuristic | |
| [181] | 2020 | ✓ | Heuristic | |
| [118] | 2020 | Heuristic | ||
| [182] | 2017 | ✓ | Heuristic | |
| [183] | 2021 | ✓ | Heuristic | |
| [184] | 2018 | ✓ | Heuristic | |
| [185] | 2021 | ✓ | Heuristic | |
| [186] | 2016 | ✓ | Heuristic, IP, MINP | |
| [187] | 2020 | ✓ | Heuristic | |
| [188] | 2020 | ✓ | PSO | |
| [189] | 2018 | ✓ | Heuristic | |
| [190] | 2019 | ✓ | Heuristic | |
| [191] | 2020 | ✓ | Heuristic | |
| [192] | 2019 | ✓ | Heuristic | |
| [193] | 2021 | ✓ | Heuristic | |
| [195] | 2021 | ✓ | Heuristic, LP | |
| [196] | 2018 | ✓ | Heuristic, MILP | |
| [197] | 2021 | ✓ | Random forest, k-means | |
| [198] | 2020 | ✓ | Clustering algorithm | |
| [199] | 2018 | ✓ | GMM, WEM, k-means | |
| [200] | 2021 | ✓ | Actor-critic RL | |
| Paper | Year | Category | Specific Algorithm | |
|---|---|---|---|---|
| CA | ML | |||
| [201] | 2020 | ✓ | Heuristic | |
| [113] | 2017 | ✓ | Heuristic, MILP | |
| [25] | 2019 | ✓ | Heuristic | |
| [145] | 2020 | ✓ | Heuristic | |
| [26] | 2020 | ✓ | Heuristic | |
| [202] | 2020 | ✓ | Heuristic | |
| [203] | 2021 | ✓ | Heuristic | |
| [204] | 2018 | ✓ | Heuristic | |
| [70] | 2019 | ✓ | GA | |
| [205] | 2018 | ✓ | Heuristic | |
| [206] | 2019 | ✓ | Heuristic | |
| [129] | 2020 | ✓ | GA | |
| [115] | 2021 | ✓ | Heuristic | |
| [207] | 2021 | ✓ | Heuristic | |
| [208] | 2019 | ✓ | Heuristic | |
| [209] | 2018 | ✓ | Heuristic | |
| [210] | 2018 | ✓ | Heuristic | |
| [211] | 2019 | ✓ | Heuristic | |
| [212] | 2020 | ✓ | Heuristic | |
| [213] | 2020 | ✓ | Heuristic | |
| [214] | 2020 | ✓ | Heuristic, MILP | |
| [216] | 2019 | ✓ | Heuristic | |
| [215] | 2021 | ✓ | Heuristic | |
| [217] | 2020 | ✓ | Heuristic | |
| [218] | 2020 | ✓ | Heuristic | |
| [219] | 2021 | ✓ | Heuristic | |
| [220] | 2021 | ✓ | Heuristic | |
| [142] | 2016 | ✓ | Heuristic, MILP | |
| [221] | 2018 | ✓ | GA, MILP | |
| [222] | 2018 | ✓ | LP, Convex Optimization | |
| [223] | 2020 | ✓ | RL | |
| [224] | 2021 | ✓ | DQN | |
| [225] | 2020 | ✓ | DDPG | |
| [226] | 2021 | ✓ | Q-learning | |
| [227] | 2019 | ✓ | Q-learning | |
| [231] | 2020 | ✓ | DRL | |
| [232] | 2020 | ✓ | RL, DRL | |
| [234] | 2021 | ✓ | Q-learning | |
| [235] | 2019 | ✓ | SVR, k-means | |
| [236] | 2021 | ✓ | DDPG | |
| Paper | Year | Category | Specific Algorithm | |
|---|---|---|---|---|
| CA | ML | |||
| [237] | 2018 | ✓ | Heuristic | |
| [238] | 2021 | ✓ | Heuristic | |
| [239] | 2021 | ✓ | Heuristic | |
| [240] | 2021 | ✓ | Heuristic | |
| [241] | 2020 | ✓ | Heuristic | |
| [242] | 2021 | ✓ | Heuristic | |
| [243] | 2019 | ✓ | Heuristic | |
| [244] | 2020 | ✓ | Heuristic | |
| [245] | 2019 | ✓ | Heuristic | |
| [246] | 2019 | ✓ | Heuristic | |
| [247] | 2020 | ✓ | Heuristic | |
| [27] | 2019 | ✓ | Heuristic | |
| [242] | 2021 | ✓ | Heuristic | |
| [248] | 2020 | ✓ | Heuristic | |
| [249] | 2019 | ✓ | Convex Optimization | |
| [250] | 2021 | ✓ | Heuristic, MINLP | |
| [251] | 2021 | ✓ | Heuristic, MINLP | |
| [252] | 2019 | ✓ | Q-learning | |
| [253] | 2020 | ✓ | DDPG | |
| [28] | 2021 | ✓ | DRL | |
| [254] | 2020 | ✓ | DQN | |
| [255] | 2019 | ✓ | Fuzzy C-means | |
| Paper | Year | Category | Specific Algorithm | |
|---|---|---|---|---|
| CA | ML | |||
| [256] | 2018 | ✓ | Heuristic | |
| [257] | 2021 | ✓ | Heuristic | |
| [29] | 2020 | ✓ | Heuristic | |
| [258] | 2020 | ✓ | Heuristic | |
| [259] | 2020 | ✓ | Heuristic | |
| [260] | 2016 | ✓ | Heuristic | |
| [261] | 2018 | ✓ | Heuristic | |
| [262] | 2020 | ✓ | Heuristic | |
| [30] | 2020 | ✓ | DDPG | |
| [263,264] | 2020, 2021 | ✓ | Actor-critic | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abubakar, A.I.; Ahmad, I.; Omeke, K.G.; Ozturk, M.; Ozturk, C.; Abdel-Salam, A.M.; Mollel, M.S.; Abbasi, Q.H.; Hussain, S.; Imran, M.A. A Survey on Energy Optimization Techniques in UAV-Based Cellular Networks: From Conventional to Machine Learning Approaches. Drones 2023, 7, 214. https://doi.org/10.3390/drones7030214
Abubakar AI, Ahmad I, Omeke KG, Ozturk M, Ozturk C, Abdel-Salam AM, Mollel MS, Abbasi QH, Hussain S, Imran MA. A Survey on Energy Optimization Techniques in UAV-Based Cellular Networks: From Conventional to Machine Learning Approaches. Drones. 2023; 7(3):214. https://doi.org/10.3390/drones7030214
Chicago/Turabian StyleAbubakar, Attai Ibrahim, Iftikhar Ahmad, Kenechi G. Omeke, Metin Ozturk, Cihat Ozturk, Ali Makine Abdel-Salam, Michael S. Mollel, Qammer H. Abbasi, Sajjad Hussain, and Muhammad Ali Imran. 2023. "A Survey on Energy Optimization Techniques in UAV-Based Cellular Networks: From Conventional to Machine Learning Approaches" Drones 7, no. 3: 214. https://doi.org/10.3390/drones7030214
APA StyleAbubakar, A. I., Ahmad, I., Omeke, K. G., Ozturk, M., Ozturk, C., Abdel-Salam, A. M., Mollel, M. S., Abbasi, Q. H., Hussain, S., & Imran, M. A. (2023). A Survey on Energy Optimization Techniques in UAV-Based Cellular Networks: From Conventional to Machine Learning Approaches. Drones, 7(3), 214. https://doi.org/10.3390/drones7030214