
Unknown Input Observer-Based Fixed-Time Trajectory Tracking Control for QUAV with Actuator Saturation and Faults

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The fixed-time UIOs are designed to estimate the lumped disturbance for translational and rotational subsystems, with the estimation error able to converge to zero in fixed time. The proposed observer has three advantages and can overcome the limitations described in [20,21,22,23,24,25,26]. Firstly, it does not require prior knowledge of the upper bound of disturbance or its derivative. Additionally, the sign function is absent in UIO, which implies that the observation of disturbance is smoother and the estimation precision is higher. Furthermore, it can estimate the mutant disturbance accurately and rapidly.
- Based on the estimation values provided by fixed-time UIO, fixed-time tracking controllers are proposed for both subsystems to stabilize the tracking error into a small region in fixed time. In contrast with the existing controllers with finite-time stability [2,14,15,16,17], the proposed fixed-time controllers’ convergence time is independent of initial values.
- External disturbances, inertia uncertainties, actuator faults, and input saturation are all considered in this paper. In [4,11,12,16,28], input saturation is not considered. Although input saturation is considered in [29,30,31], they simply give the saturation values of control input signals. In this paper, input saturation is constraining the rotor speed rather than the control input signals, which is more reasonable.
2. Mathematical Model and Problem Formulation
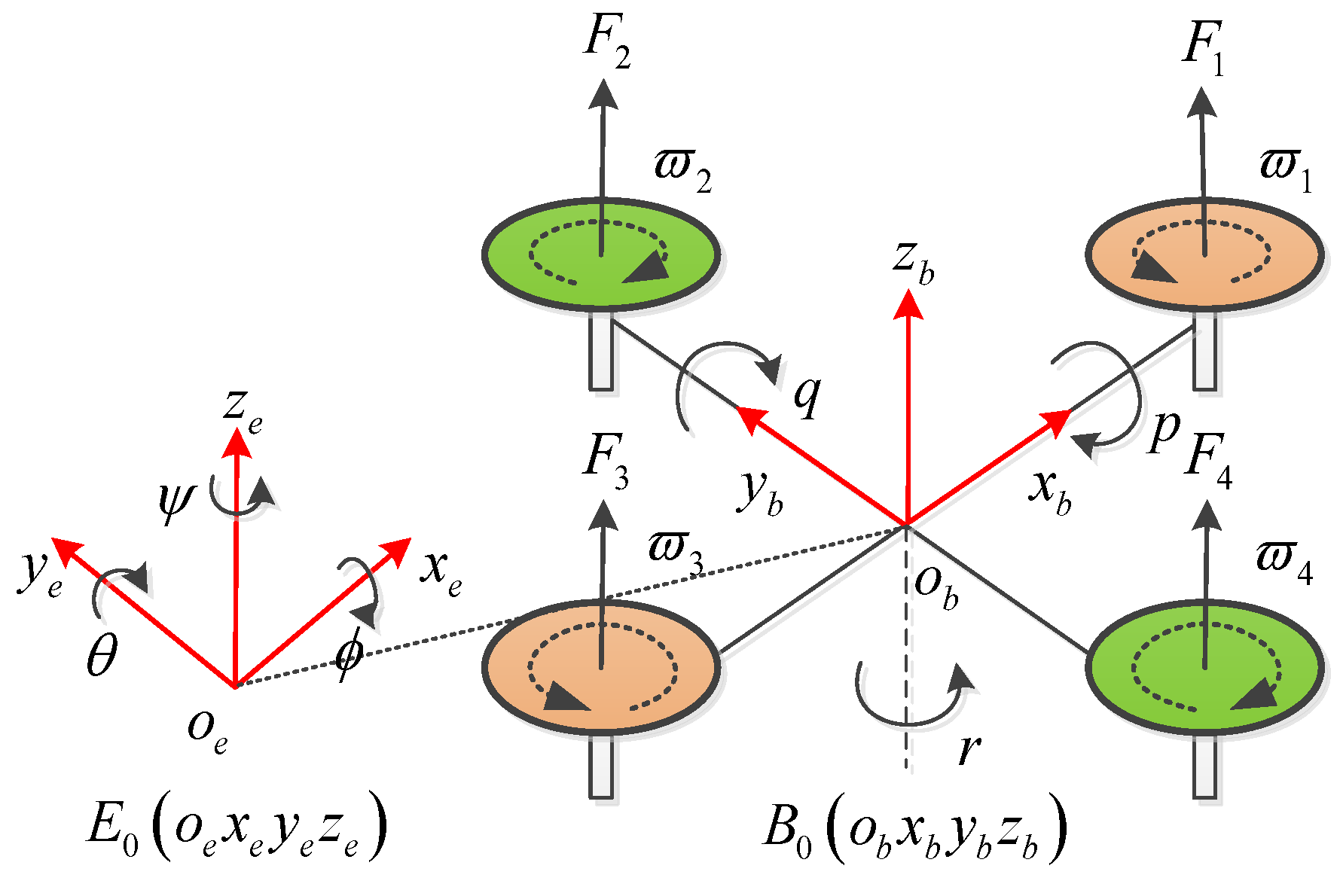
2.1. Mathematical Model of QUAV
2.2. Problem Formulation
2.3. Notation and Preliminaries
3. Control Scheme
3.1. Design of Translational Subsystem
3.2. Design of Rotational Subsystem
4. Simulation and Discussion
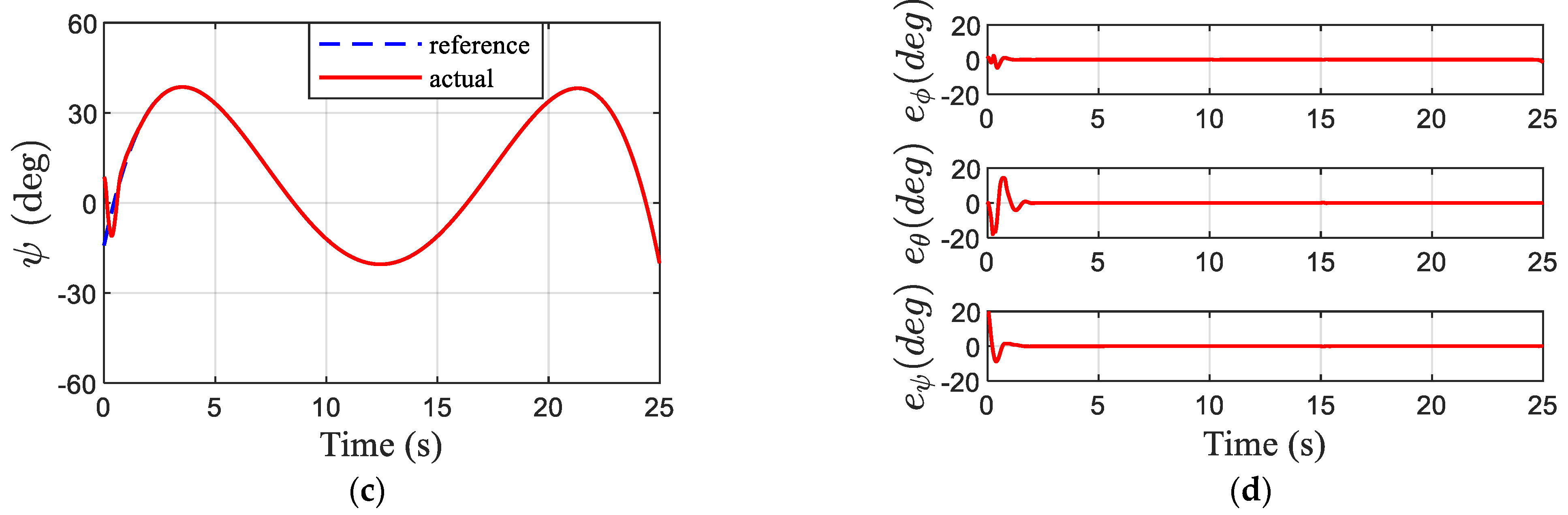
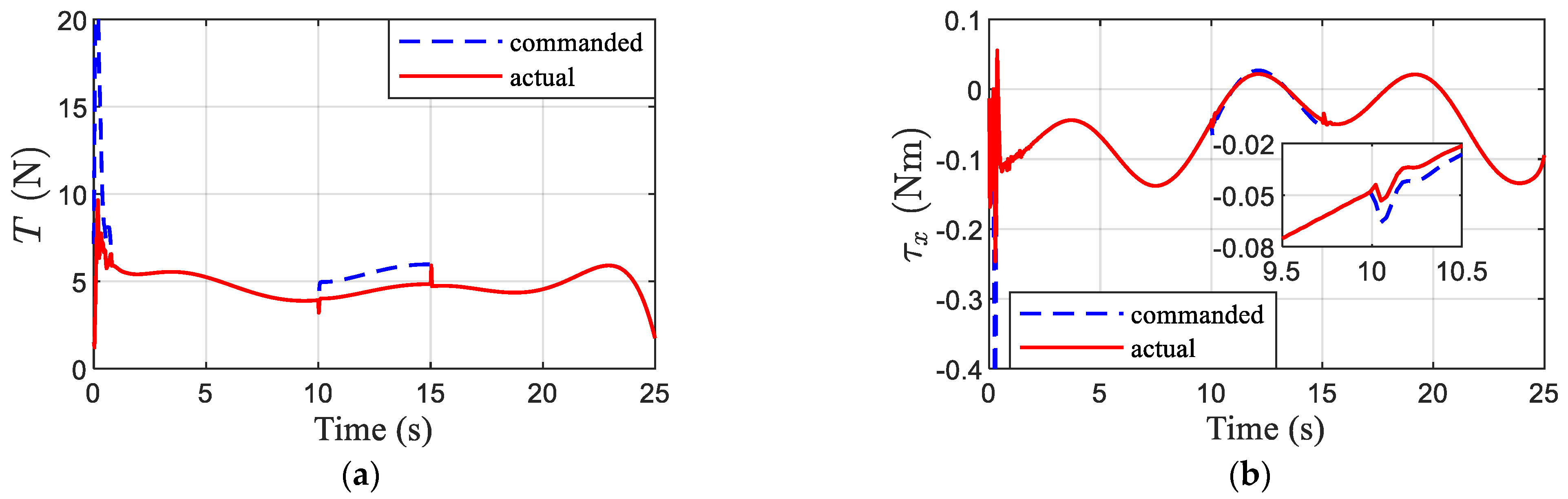
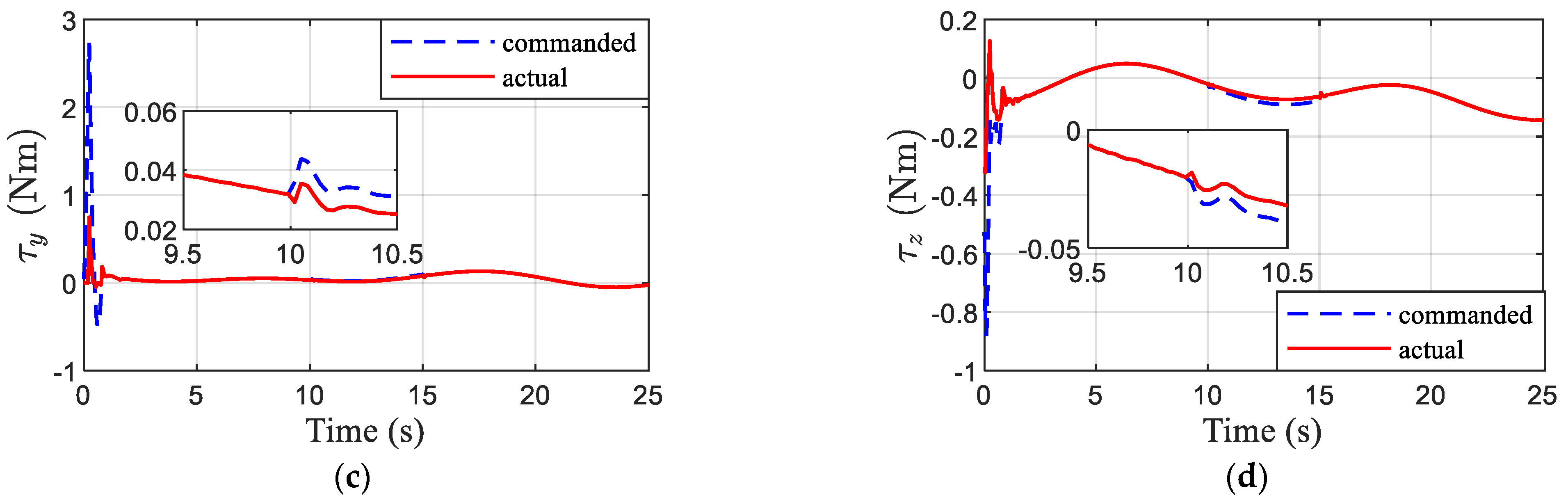
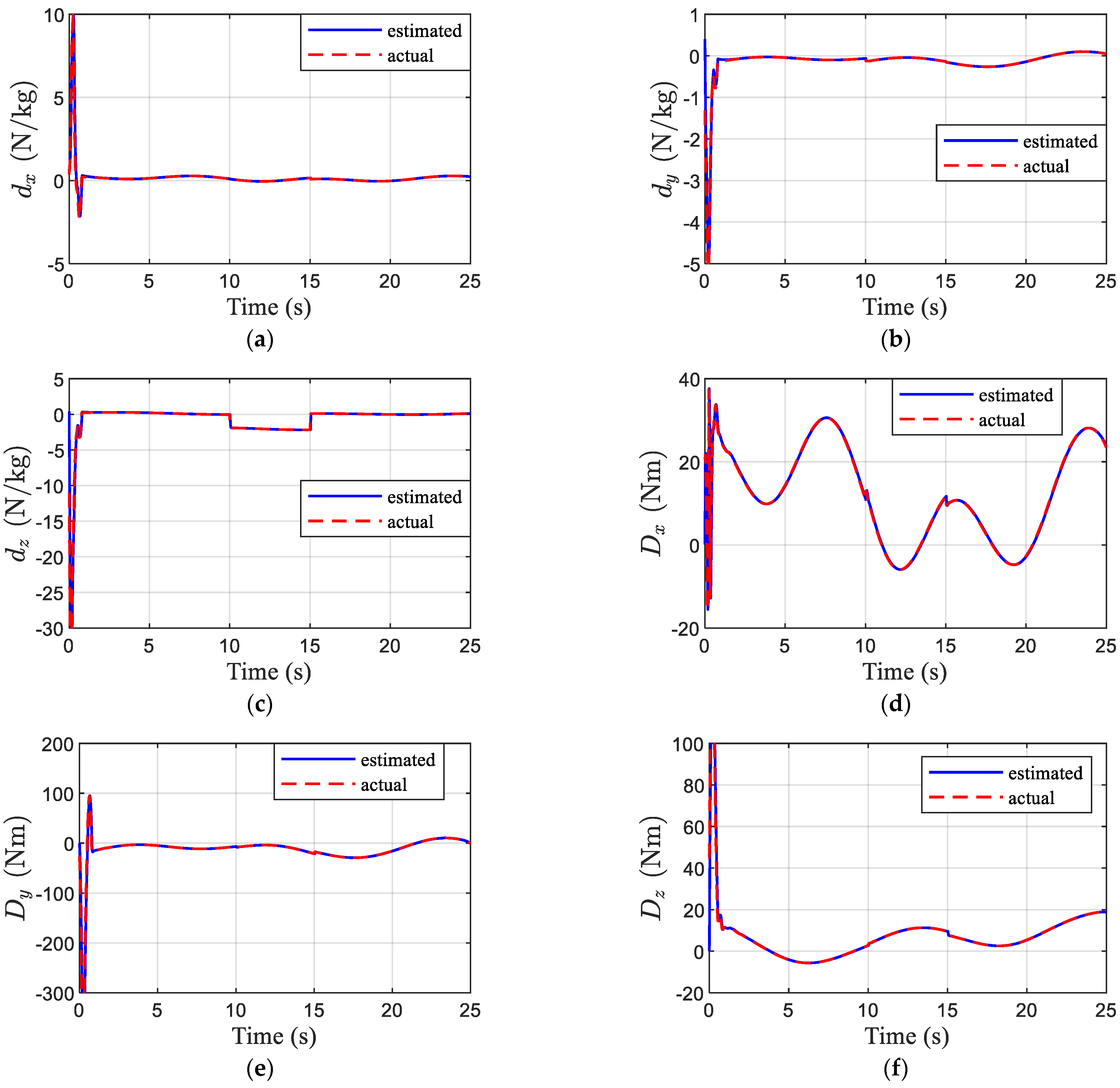
4.1. Simulation Results
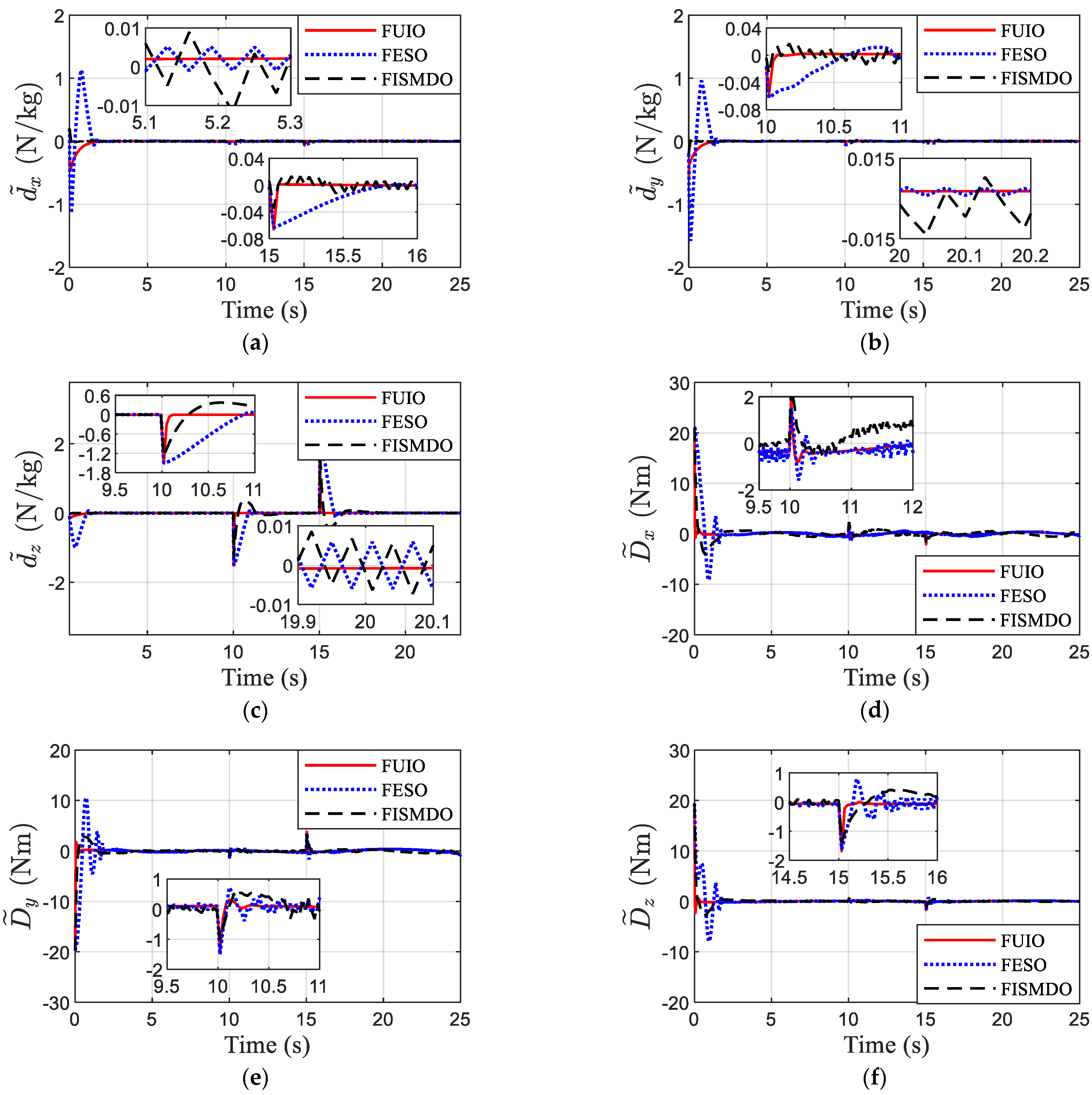
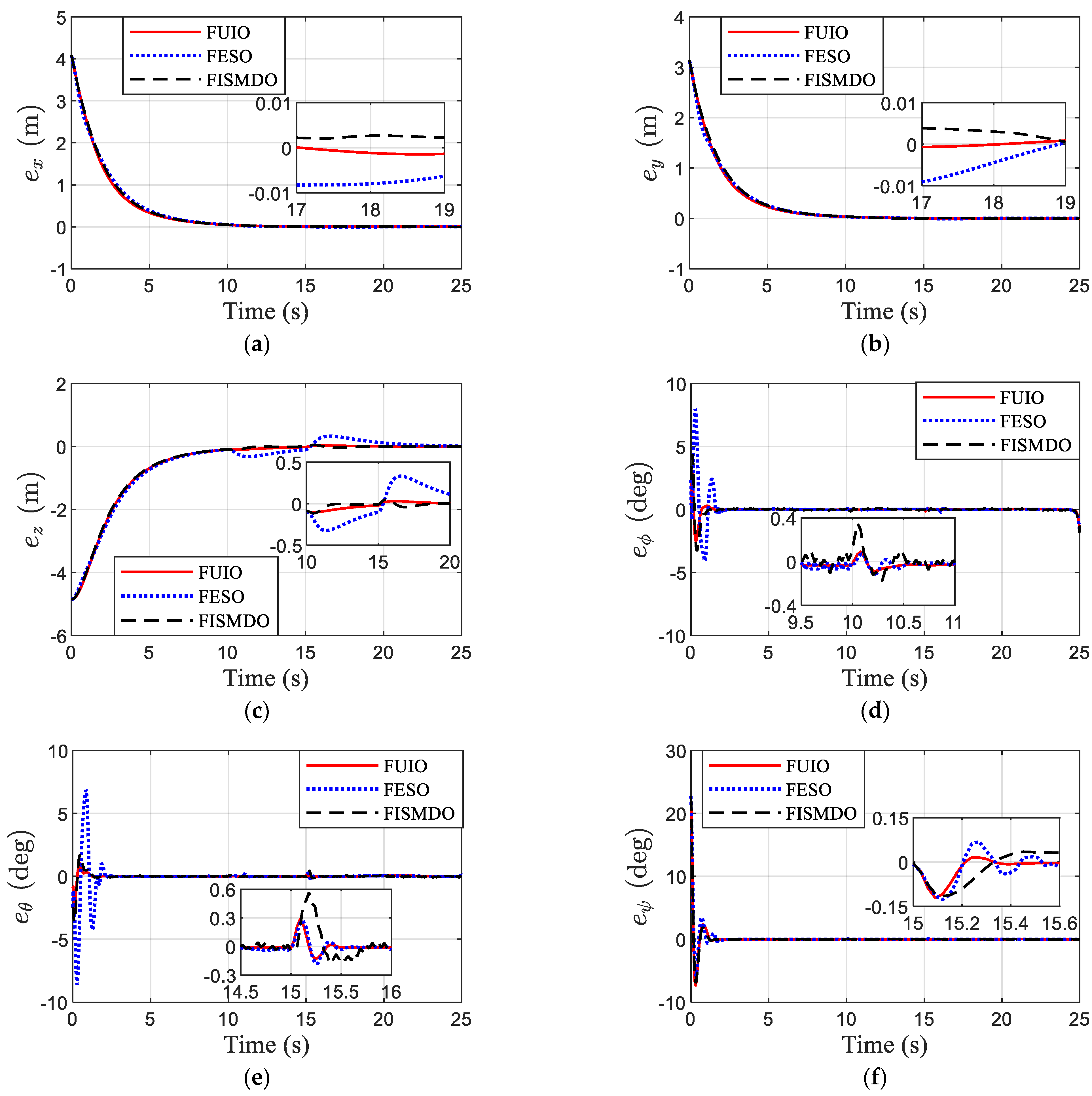
4.2. Comparison
4.3. Discussion
4.3.1. Differences between Rotor Speed Saturation and Thrust or Torque Saturation
4.3.2. The Feature of Proposed Observer
4.3.3. The Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Serrano, M.E.; Gandolfo, D.C.; Scaglia, G.J.E. Trajectory tracking controller for unmanned helicopter under environmental disturbances. ISA Trans. 2020, 106, 171–180. [Google Scholar] [CrossRef] [PubMed]
- Cao, C.Y.; Wei, C.S.; Liao, Y.X.; Zhang, Y.C.; Li, J. On novel trajectory tracking control of quadrotor UAV: A finite-time guaranteed performance approach. J. Franklin Inst. 2022, 359, 8454–8483. [Google Scholar] [CrossRef]
- Li, B.; Song, C.; Bai, S.X.; Huang, J.Y.; Ma, R.; Wan, K.F.; Neretin, E. Multi-UAV trajectory planning during cooperative tracking based on a Fusion Algorithm integrating MPC and standoff. Drones 2023, 7, 196. [Google Scholar] [CrossRef]
- Kidambi, K.B.; Fermuller, C.; Aloimonos, Y.; Xu, H. Robust nonlinear control-based trajectory tracking for quadrotors under uncertainty. IEEE Control Syst. Lett. 2021, 5, 2042–2047. [Google Scholar] [CrossRef]
- Blas, L.A.; Davila, J.; Salazar, S.; Bonilla, M. Robust trajectory tracking for an uncertain UAV based on active disturbance rejection. IEEE Control Syst. Lett. 2022, 6, 1466–1471. [Google Scholar] [CrossRef]
- Singhal, K.; Kumar, V. Robust trajectory tracking control of non-holonomic wheeled mobile robots using an adaptive fractional order parallel fuzzy PID controller. J. Franklin Inst. 2022, 359, 4160–4215. [Google Scholar] [CrossRef]
- Mathiyalagan, K.; Sangeetha, G. Finite-time stabilization of nonlinear time delay systems using LQR based sliding mode control. J. Franklin Inst. 2019, 356, 3948–3964. [Google Scholar] [CrossRef]
- Lee, D.; Kim, H.J.; Sastry, S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter. Int. J. Control Autom. Syst. 2009, 7, 419–428. [Google Scholar] [CrossRef]
- Koksal, N.; An, H.; Fidan, B. Backstepping-based adaptive control of a quadrotor UAV with guaranteed tracking performance. ISA Trans. 2020, 105, 98–110. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.Q.; Cheng, X.H.; Zhang, J.J. Command filter-based adaptive fuzzy integral backstepping control for quadrotor UAV with input saturation. J. Franklin Inst. 2023, 360, 484–507. [Google Scholar] [CrossRef]
- Labbadi, M.; Boukal, Y.; Cherkaoui, M.; Djemai, M. Fractional-order global sliding mode controller for an uncertain quadrotor UAVs subjected to external disturbances. J. Franklin Inst. 2021, 358, 4822–4847. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Adaptive fractional-order nonsingular fast terminal sliding mode based robust tracking control of quadrotor UAV with Gaussian random disturbances and uncertainties. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2265–2277. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, W.; Suzuki, S.; Namiki, A.; Liu, H.X.; Li, Z.R. Design and implementation of UAV velocity controller based on reference model sliding mode control. Drones 2023, 7, 130. [Google Scholar] [CrossRef]
- Huang, D.Q.; Huang, T.P.; Qin, N.; Li, Y.A.; Yang, Y. Finite-time control for a UAV system based on finite-time disturbance observer. Aerosp. Sci. Technol. 2022, 129, 107825. [Google Scholar] [CrossRef]
- Cheng, W.L.; Jiang, B.; Zhang, K.; Ding, S.X. Robust finite-time cooperative formation control of UGV-UAV with model uncertainties and actuator faults. J. Franklin Inst. 2021, 358, 8811–8837. [Google Scholar] [CrossRef]
- Wang, J.H.; Alattas, K.A.; Bouteraa, Y.; Mofid, O.; Mobayen, S. Adaptive finite-time backstepping control tracker for quadrotor UAV with model uncertainty and external disturbance. Aerosp. Sci. Technol. 2023, 133, 108088. [Google Scholar] [CrossRef]
- Liu, B.J.; Li, A.J.; Guo, Y.; Wang, C.Q. Adaptive distributed finite-time formation control for multi-UAVs under input saturation without collisions. Aerosp. Sci. Technol. 2022, 120, 107252. [Google Scholar] [CrossRef]
- Xia, K.W.; Son, H.S. Adaptive fixed-time control of autonomous VTOL UAVs for ship landing operations. J. Franklin Inst. 2020, 357, 6175–6196. [Google Scholar] [CrossRef]
- Tan, J.; Dong, Y.F.; Shao, P.Y.; Qu, G.M. Anti-saturation adaptive fault-tolerant control with fixed-time prescribed performance for UAV under AOA asymmetric constraint. Aerosp. Sci. Technol. 2022, 120, 107264. [Google Scholar] [CrossRef]
- Cui, L.; Hou, X.Y.; Zuo, Z.Q.; Yang, H.J. An adaptive fast super-twisting disturbance observer-based dual closed-loop attitude control with fixed-time convergence for UAV. J. Franklin Inst. 2022, 359, 2514–2540. [Google Scholar] [CrossRef]
- Chen, L.L.; Liu, Z.B.; Dang, Q.Q.; Zhao, W.; Wang, G.D. Robust trajectory tracking control for a quadrotor using recursive sliding mode control and nonlinear extended state observer. Aerosp. Sci. Technol. 2022, 128, 107749. [Google Scholar] [CrossRef]
- Shao, S.S.; Wang, S.; Zhao, Y.J. Fixed time output feedback control for quadrotor unmanned aerial vehicle under disturbances. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 3554–3566. [Google Scholar] [CrossRef]
- Cui, L.; Zhang, R.Z.; Yang, H.J.; Zuo, Z.Q. Adaptive super-twisting trajectory tracking control for an unmanned aerial vehicle under gust winds. Aerosp. Sci. Technol. 2021, 115, 106833. [Google Scholar] [CrossRef]
- Gonzalez, J.A.C.; Pena, O.S.; Morales, J.D.L. Observer-based super twisting design: A comparative study on quadrotor altitude control. ISA Trans. 2021, 109, 307–314. [Google Scholar] [CrossRef] [PubMed]
- Su, B.; Wang, H.B.; Wang, Y.L. Dynamic event-triggered formation control for AUVs with fixed-time integral sliding mode disturbance observer. Ocean Eng. 2021, 240, 109893. [Google Scholar] [CrossRef]
- Dong, Z.; Liu, L.; Wang, S.P. Sliding mode disturbance observer-based adaptive dynamic inversion fault-tolerant control for Fixed-Wing UAV. Drones 2022, 6, 295. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Golestani, M. Energy-efficient disturbance observer-based attitude tracking control with fixed-time convergence for spacecraft. IEEE. Trans. Aero. Elec. Syst. 2022, 1–10. [Google Scholar] [CrossRef]
- Xiong, C.G.; Yang, L.; Zhou, B.; Chen, Y. Finite-time fault-tolerant control of robotic systems with uncertain dynamics. Int. J. Control Autom. Syst. 2022, 20, 2681–2690. [Google Scholar] [CrossRef]
- Fu, C.Y.; Tian, Y.T.; Huang, H.Y.; Zhang, L.; Peng, C. Finite-time trajectory tracking control for a 12-rotor unmanned aerial vehicle with input saturation. ISA Trans. 2018, 81, 52–62. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R.J.; Wang, X.D.; Wang, X.X. Anti-saturation adaptive finite-time neural network based fault-tolerant tracking control for a quadrotor UAV with external disturbances. Aerosp. Sci. Technol. 2021, 115, 106790. [Google Scholar] [CrossRef]
- Cao, N.; Lynch, A.F. Inner-outer loop control for quadrotor UAVs with input and state constraints. IEEE Trans. Contr. Syst. T 2015, 24, 1797–1804. [Google Scholar] [CrossRef]
- Lee, D. Fault-tolerant finite-time controller for attitude tracking of rigid spacecraft using intermediate quaternion. IEEE Trans. Aero Elec Sys. 2021, 57, 540–553. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control system. IEEE Trans. Automat Contr. 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Bernuau, E.; Efimov, D.; Perruquetti, W. On homogeneity and its application in sliding mode control. J. Franklin Inst. 2014, 351, 1866–1901. [Google Scholar] [CrossRef]
- Andrieu, V.; Praly, L.; Astolfi, A. Homogeneous approximation, recursive observer design, and output feedback. SIAM J. Control Optim. 2009, 47, 1814–1850. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, S.; Xu, S.; Zhao, Y.; Wu, X. Unknown Input Observer-Based Fixed-Time Trajectory Tracking Control for QUAV with Actuator Saturation and Faults. Drones 2023, 7, 344. https://doi.org/10.3390/drones7060344
Shao S, Xu S, Zhao Y, Wu X. Unknown Input Observer-Based Fixed-Time Trajectory Tracking Control for QUAV with Actuator Saturation and Faults. Drones. 2023; 7(6):344. https://doi.org/10.3390/drones7060344
Chicago/Turabian StyleShao, Shikai, Shuangyin Xu, Yuanjie Zhao, and Xiaojing Wu. 2023. "Unknown Input Observer-Based Fixed-Time Trajectory Tracking Control for QUAV with Actuator Saturation and Faults" Drones 7, no. 6: 344. https://doi.org/10.3390/drones7060344