
Heterogeneous Flight Management System (FMS) Design for Unmanned Aerial Vehicles (UAVs): Current Stages, Challenges, and Opportunities



Abstract
1. Introduction
- 1.
- To the best of our knowledge, this represents the first time in the literature that the design road map of heterogeneous FMS for high-reliable UAVs is systematically proposed in different levels and cross-layers abstractly and figuratively.
- 2.
- The implications and novelties of acceleration possibilities in data-, model-, and hardware levels for pursuing heterogeneity management are comprehensively surveyed.
- 3.
- The advantages and limitations of the tools mentioned above are investigated. Several exemplary applications are provided, where the challenges and future trends are discussed in detail.
2. Loop Cycle of UAV FMS Design
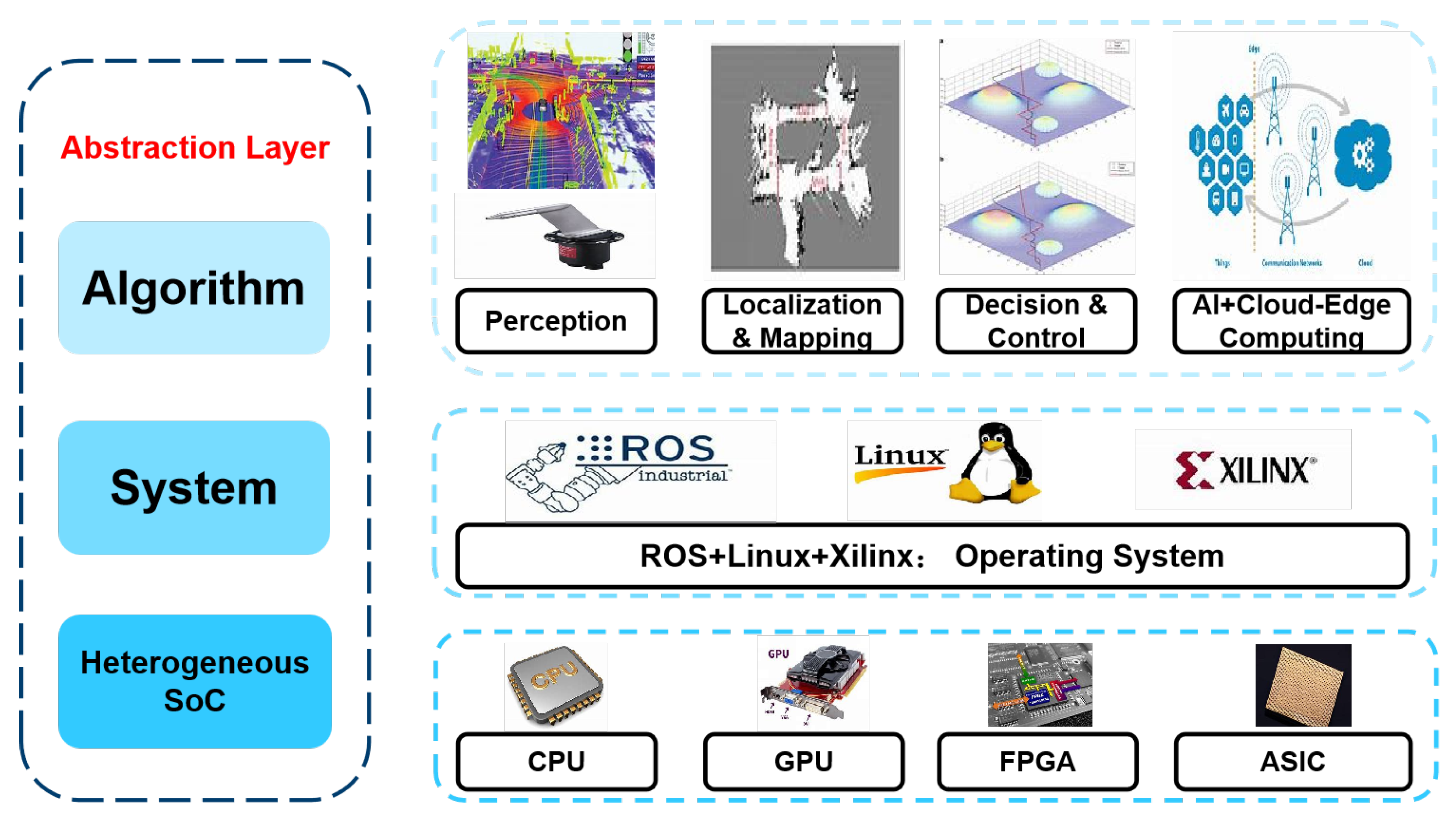
2.1. Abstraction Layer
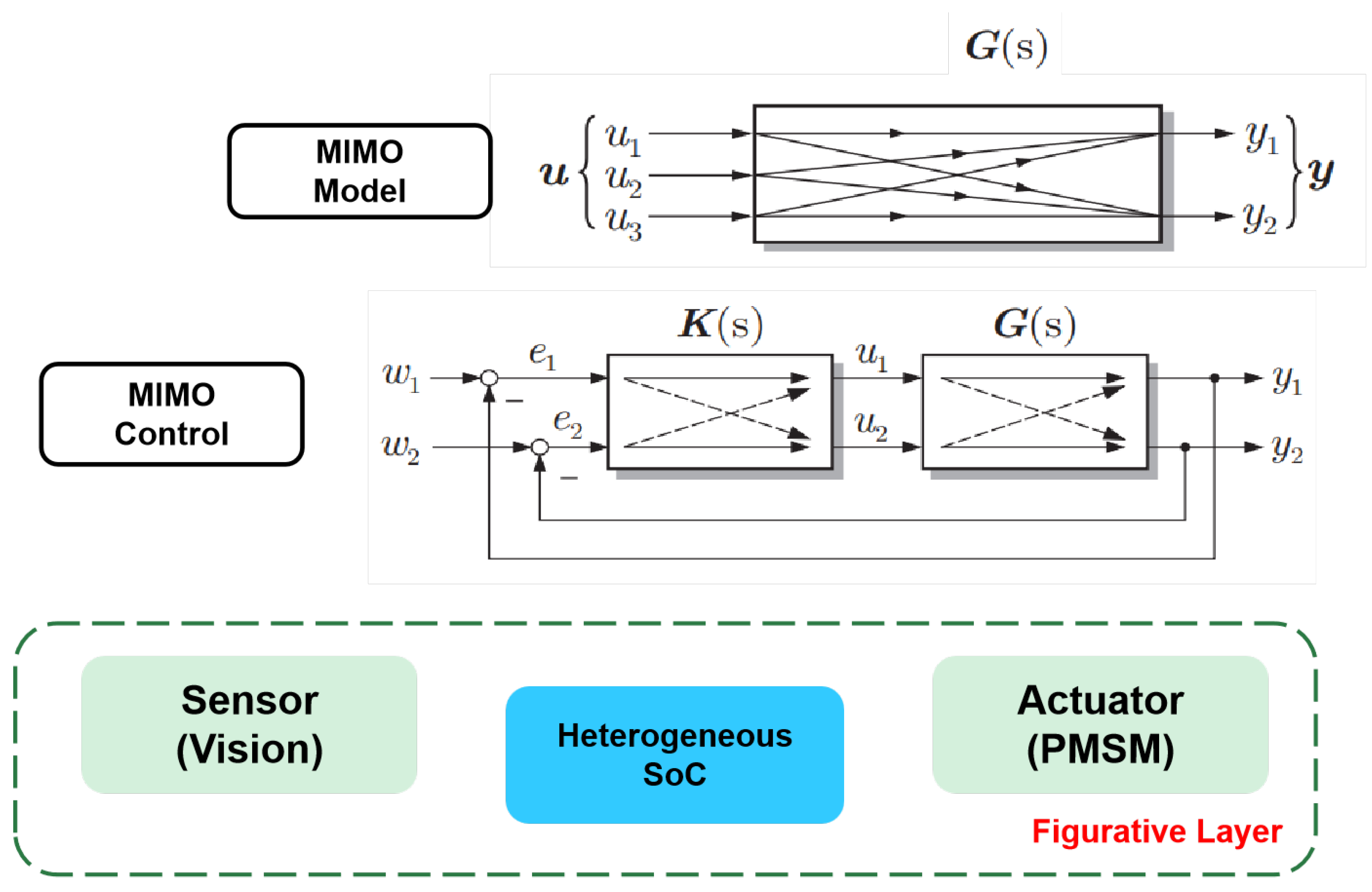
2.2. Figurative Layer
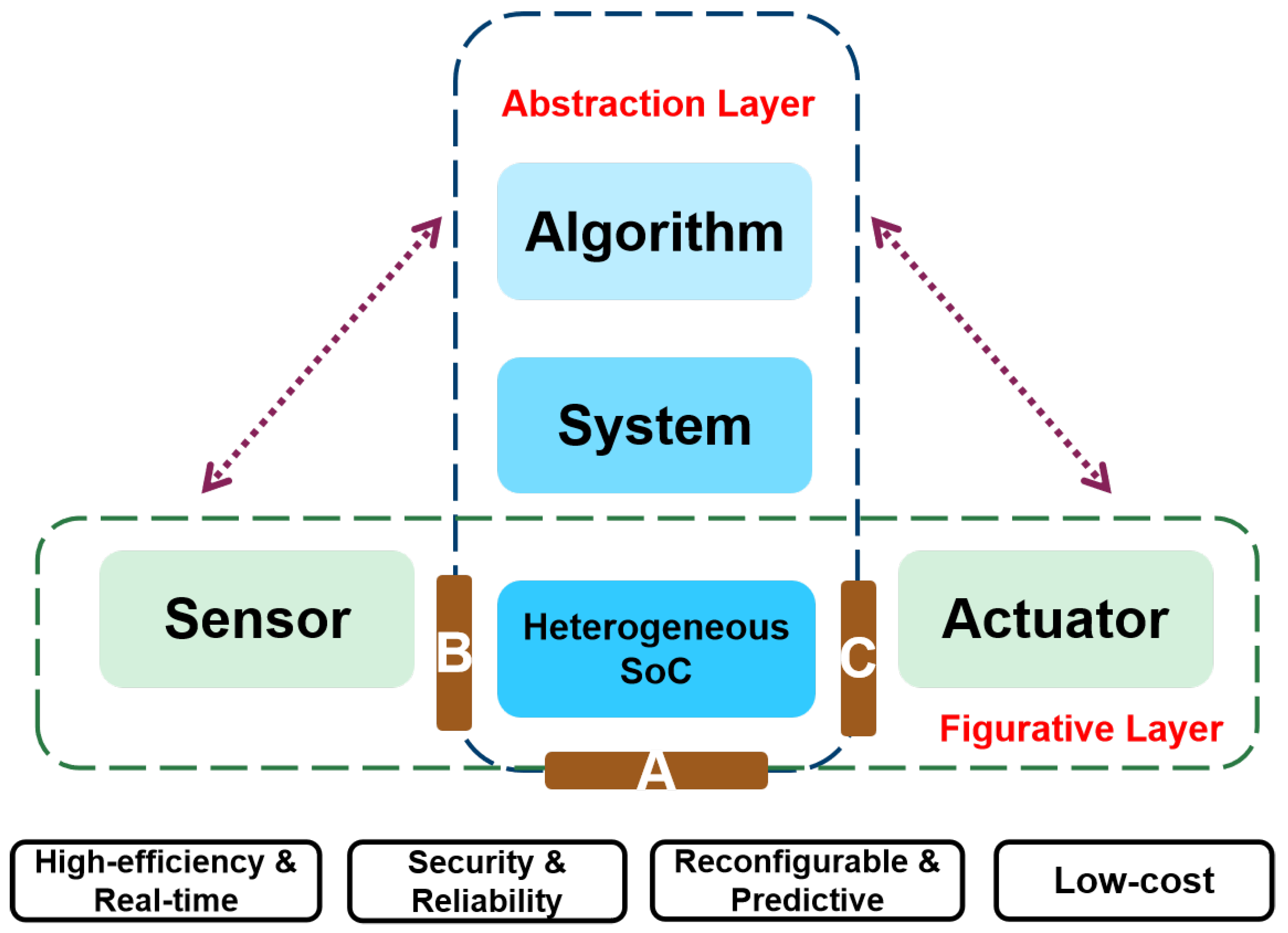
2.3. Cross Layer and Loop Cycle
- Direction A: Challenges for heterogeneous SoC design for FMS with function “evaluation and decision.”
- Direction B: Joint development of smart sensors and heterogeneous FMS with function “perception and monitoring.”
- Direction C: Cooperated development of actuators and heterogeneous FMS with function “implementation and disposal.”
3. Acceleration Methods
3.1. Light-Weight ML
3.2. Federated Learning Acceleration
3.3. Hardware Accelerators with FPGA and RISC-V
4. Research Focuses
4.1. Visual-Guided Landing
4.2. Intelligent Fault Diagnosis and Detection
4.3. Controller-Embeddable Power Electronics
5. Discussion
6. Conclusions
- HW/SW Co-design FMS: The HW/SW co-design process could accelerate implementation and provide more compact and satisfying solutions.
- High-performance control of electrical machine drives: The implementation of AI-based FMS can offer increased options for enhancing the performance of UAVs.
- Integration with DT: Integrating DT can potentially decrease the duration of the product development life cycle for UAVs.
- Determination of the suitable UAV platform: The appropriate choice of UAV platform is essential to harness the potential of FMS to the greatest extent.
- Security and battery concerns: Employing FL can address privacy concerns while considering battery-life constraints that can improve the reliability and performance of UAVs.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 5G | 5th Generation |
| AI | Artificial Intelligence |
| ANN | Artificial Neural Network |
| ASIC | Application-specific integrated circuit |
| AVS | Adaptive Voltage Scaling |
| CISC | Complex Instruction Set Computer |
| CNN | Convolutional Neural Network |
| CPU | Central Processing Unit |
| CV | Computer Vision |
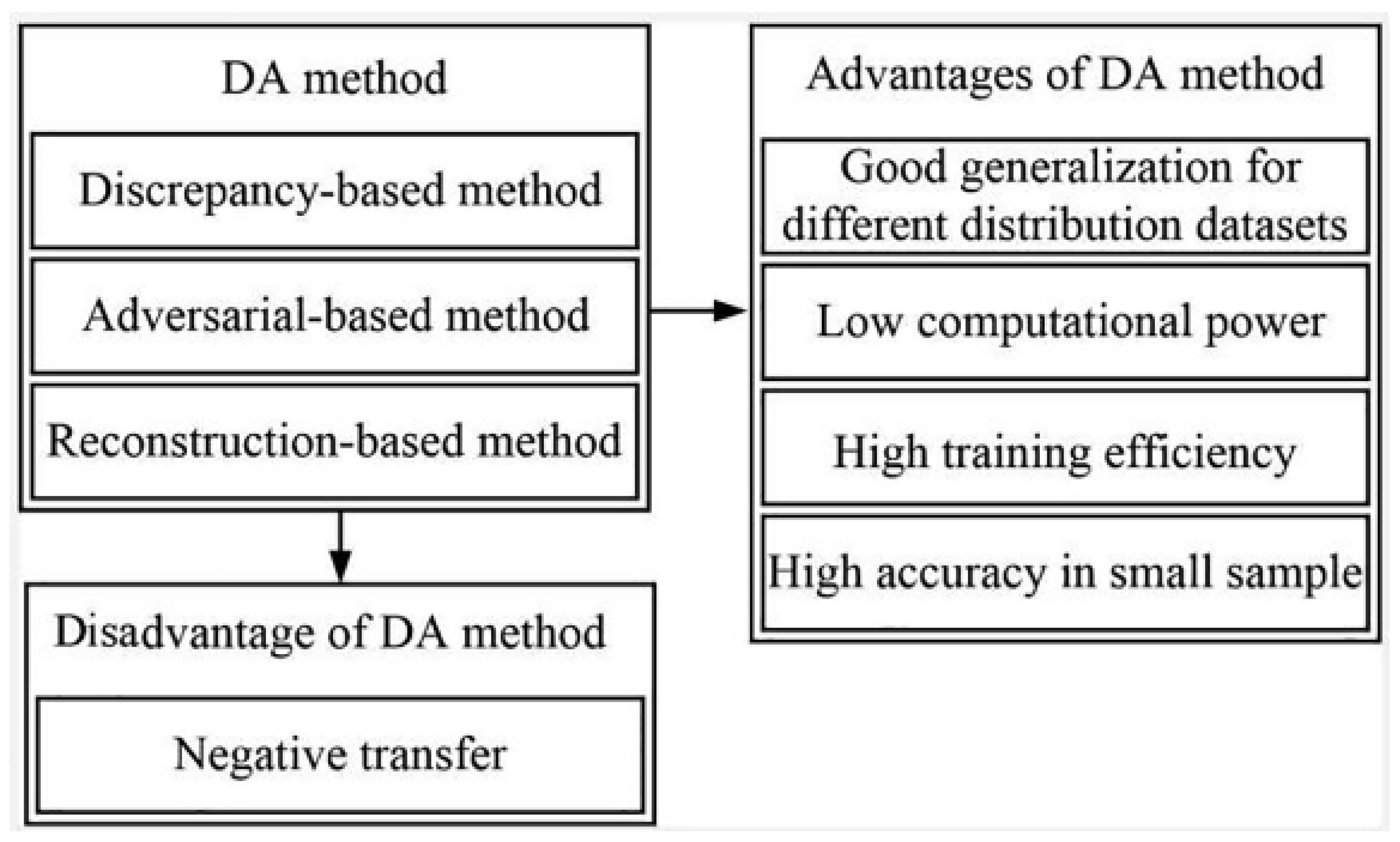
| DA | Domain Adaption |
| DAA | Detection Furthermore, Avoidance |
| DC | Direct Current |
| DGA | Dissolved Gas Analysis |
| DL | Deep Learning |
| DLP | Data-Level Parallelism |
| DNN | Deep Neural Network |
| DSP | Digital Signal Processor |
| DT | Digital Twin |
| EC | Edge Computing |
| FANET | Flying Ad-hoc Network |
| FCS | Flight Control System |
| FDD | Fault Detection and Diagnosis |
| FDI | False Data Injection |
| FL | Federated Learning |
| FMaaS | Flight-Management-as-a-Service |
| FMS | Flight Management System |
| FPGA | Field Programmable Gate Array |
| FRL | Federated Reinforcement Learning |
| FSL | Few-shot Learning |
| FW | Fixed-Wing |
| GOPS | Giga Operations Per Second |
| GPS | Global Position System |
| GPU | Graphic Processing Unit |
| HC | Heterogeneous Computing |
| HW | Hardware |
| IaaS | Infrastructure-as-a-Service |
| IDD | Independent and Identically Distributed |
| IMUs | Inertial Measurement Unit |
| IoT | Internet of Things |
| IPMSM | Interior Permanent Magnet Synchronous Motor |
| ISA | Instruction Set Architecture |
| Lidar | Light detection and ranging |
| MCSA | Motor Current Signature Analysis |
| MCU | Micro Controller Unit |
| MGD | Momentum Gradient Descent |
| MIMO | Multi-Input Multi-Output |
| ML | Machine Learning |
| NRT | Non-Real-Time |
| ODEs | Ordinary Differential Equations |
| Ops | Operations |
| ORTiS | Open Real-Time Simulation |
| OSH | Open-Source Hardware |
| PCA | Principal component analysis |
| PE | Power Electronics |
| PID | Propotional-Integral-Derivative |
| PMSN | Permanent Magnet Synchronous Machine |
| PQSU | Pruning, Quantization, and Selective Updating |
| PROSAC | PROgressive SAmple Consensus |
| PULP | Parallel Ultra-Low Power |
| PV | Photovoltaic |
| PWM | Pulse-Width-Modulation |
| RISC-V | Reduced Instruction-Set Computer-Five |
| RL | Reinforcement Learning |
| ROS | Robot Operating System |
| RT | Real-Time |
| RUL | Remaining Useful Life |
| RW | Rotary Wing |
| SGD | Stochastic Gradient Descent |
| SLAM | Simultaneous Localization Furthermore, Mapping |
| SLZ | Safe Landing Zone |
| SoC | System on Chips |
| SW | Software |
| SWaP-C | Size, Weight, Power and Cost |
| TL | Transfer Learning |
| ToF | Time-of-Flight |
| UAVs | Unmanned Aerial Vehicles |
| VTOL | Vertical Take Off and Landing |
References
- Liu, Y.; Dai, H.N.; Wang, Q.; Shukla, M.K.; Imran, M. Unmanned aerial vehicle for internet of everything: Opportunities and challenges. Comput. Commun. 2020, 155, 66–83. [Google Scholar] [CrossRef]
- Ahmed, F.; Jenihhin, M. A Survey on UAV Computing Platforms: A Hardware Reliability Perspective. Sensors 2022, 22, 6286. [Google Scholar] [CrossRef]
- Flamand, E.; Rossi, D.; Conti, F.; Loi, I.; Pullini, A.; Rotenberg, F.; Benini, L. GAP-8: A RISC-V SoC for AI at the Edge of the IoT. In Proceedings of the 2018 IEEE 29th International Conference on Application-Specific Systems, Architectures and Processors (ASAP), Milano, Italy, 10–12 July 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Wan, Z.; Lele, A.; Yu, B.; Liu, S.; Wang, Y.; Reddi, V.J.; Hao, C.; Raychowdhury, A. Robotic computing on fpgas: Current progress, research challenges, and opportunities. In Proceedings of the 2022 IEEE 4th International Conference on Artificial Intelligence Circuits and Systems (AICAS), Incheon, Republic of Korean, 13–15 June 2022; pp. 291–295. [Google Scholar] [CrossRef]
- Khan, S.; Liew, C.F.; Yairi, T.; McWilliam, R. Unsupervised anomaly detection in unmanned aerial vehicles. Appl. Soft Comput. 2019, 83, 105650. [Google Scholar] [CrossRef]
- Iranfar, A.; Shahsavani, S.N.; Kamal, M.; Afzali-Kusha, A. A heuristic machine learning-based algorithm for power and thermal management of heterogeneous MPSoCs. In Proceedings of the 2015 IEEE/ACM International Symposium on Low Power Electronics and Design (ISLPED), Rome, Italy, 22–24 July 2015; pp. 291–296. [Google Scholar] [CrossRef]
- Liu, X.; Liu, J.; Eker, J.; Lee, E.A. Heterogeneous modeling and design of control systems. In Software-Enabled Control: Information Technology for Dynamical Systems; Wiley: Hoboken, NJ, USA, 2003; pp. 105–122. [Google Scholar]
- Wu, Q.; Shen, Y.; Zhang, M. Heterogeneous Computing and Applications in Deep Learning: A Survey. In Proceedings of the 2022 5th International Conference on Computer Science and Software Engineering (CSSE 2022), Guilin, China, 21–23 October 2022; pp. 383–387. [Google Scholar] [CrossRef]
- Lunlong, Z.; Jiongpo, L. Analysis of Requirements and Architecture of the Next Generation Flight Management System. In Proceedings of the 2020 7th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 18–20 December 2020; pp. 1678–1682. [Google Scholar] [CrossRef]
- Nyboe, F.F.; Malle, N.H.; Ebeid, E. MPSoC4Drones: An Open Framework for ROS2, PX4, and FPGA Integration. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 1246–1255. [Google Scholar] [CrossRef]
- Neuman, S.M.; Plancher, B.; Duisterhof, B.P.; Krishnan, S.; Banbury, C.; Mazumder, M.; Prakash, S.; Jabbour, J.; Faust, A.; de Croon, G.C.; et al. Tiny Robot Learning: Challenges and Directions for Machine Learning in Resource-Constrained Robots. In Proceedings of the 2022 IEEE 4th International Conference on Artificial Intelligence Circuits and Systems (AICAS), Incheon, Republic of Korean, 13–15 June 2022; pp. 296–299. [Google Scholar] [CrossRef]
- Lies, W.A.; Narula, L.; Iannucci, P.A.; Humphreys, T.E. Low SWaP-C Radar for Urban Air Mobility. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 74–80. [Google Scholar] [CrossRef]
- Kunle Olukotun: Scaling Machine Learning Performance—Breakfast Bytes— Cadence Blogs—Cadence Community. 2017. Available online: https://community.cadence.com/cadence_blogs_8/b/breakfast-bytes/posts/enns-olukoton (accessed on 13 April 2023).
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [PubMed]
- Wan, Z.; Yu, B.; Li, T.Y.; Tang, J.; Zhu, Y.; Wang, Y.; Raychowdhury, A.; Liu, S. A Survey of FPGA-Based Robotic Computing. IEEE Circuits Syst. Mag. 2021, 21, 48–74. [Google Scholar] [CrossRef]
- Fourlas, G.K.; Karras, G.C. A Survey on Fault Diagnosis and Fault-Tolerant Control Methods for Unmanned Aerial Vehicles. Machines 2021, 9, 197. [Google Scholar] [CrossRef]
- Gu, C.; Wheeler, P.; Castellazzi, A.; Watson, A.J.; Effah, F. Semiconductor Devices in Solid-State/Hybrid Circuit Breakers: Current Status and Future Trends. Energies 2017, 10, 495. [Google Scholar] [CrossRef]
- Zhao, S.; Blaabjerg, F.; Wang, H. An Overview of Artificial Intelligence Applications for Power Electronics. IEEE Trans. Power Electron. 2020, 36, 4633–4658. [Google Scholar] [CrossRef]
- Ruospo, A.; Cantoro, R.; Sanchez, E.; Schiavone, P.D.; Garofalo, A.; Benini, L. On-line Testing for Autonomous Systems driven by RISC-V Processor Design Verification. In Proceedings of the 2019 IEEE International Symposium on Defect and Fault Tolerance in VLSI and Nanotechnology Systems (DFT), Noordwijk, The Netherlands, 2–4 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mao, W.; Xiao, Z.; Xu, P.; Ren, H.; Liu, D.; Zhao, S.; An, F.; Yu, H. Energy-Efficient Machine Learning Accelerator for Binary Neural Networks. In Proceedings of the 2020 on Great Lakes Symposium on VLSI GLSVLSI ’20; Association for Computing Machinery: New York, NY, USA, 2020; pp. 77–82. [Google Scholar] [CrossRef]
- Moeyersons, J.; Gevaert, M.; Réculé, K.E.; Volckaert, B.; Turck, F.D. UAVs-as-a-Service: Cloud-based Remote Application Management for Drones. In Proceedings of the 2021 IFIP/IEEE International Symposium on Integrated Network Management (IM), Bordeaux, France, 18–20 May 2021; pp. 926–931. [Google Scholar]
- Medara, R.; Singh, R.S. A Review on Energy-Aware Scheduling Techniques for Workflows in IaaS Clouds. Wirel. Pers. Commun. 2022, 125, 1545–1584. [Google Scholar] [CrossRef]
- Crockett, L.; Northcote, D.; Ramsay, C.; Robinson, F.; Stewart, R. Exploring Zynq MPSoC: With PYNQ and Machine Learning Applications; Strathclyde Academic Media: Strathclyde, UK, 2019. [Google Scholar]
- Lunze, J. Regelungstechnik 2: Mehrgrößensysteme, Digitale Regelung; Springer: Berlin, Germany, 2014. [Google Scholar]
- Luo, L.; Cao, S.Y.; Han, B.; Shen, H.L.; Li, J. BVMatch: Lidar-Based Place Recognition Using Bird’s-Eye View Images. IEEE Robot. Autom. Lett. 2021, 6, 6076–6083. [Google Scholar] [CrossRef]
- Liegmann, E.; Karamanakos, P.; Kennel, R. Real-Time Implementation of Long-Horizon Direct Model Predictive Control on an Embedded System. IEEE Open J. Ind. Appl. 2021, 3, 1–12. [Google Scholar] [CrossRef]
- Wu, Y. Development Prospects of Intelligent Flight Technology of China’s Space Transportation System. J. Astronaut. 2023, 44, 313–321. [Google Scholar] [CrossRef]
- Wang, Y.; Yao, Q.; Kwok, J.T.; Ni, L.M. Generalizing from a Few Examples: A Survey on Few-Shot Learning. ACM Comput. Surv. 2020, 53, 1–34. [Google Scholar] [CrossRef]
- Li, Z.; He, Y.; Yu, H.; Kang, J.; Li, X.; Xu, Z.; Niyato, D. Data Heterogeneity-Robust Federated Learning via Group Client Selection in Industrial IoT. IEEE Internet Things J. 2022, 9, 17844–17857. [Google Scholar] [CrossRef]
- Parnami, A.; Lee, M. Learning from few examples: A summary of approaches to few-shot learning. arXiv 2022. [Google Scholar] [CrossRef]
- Zhuang, F.; Qi, Z.; Duan, K.; Xi, D.; Zhu, Y.; Zhu, H.; Xiong, H.; He, Q. A comprehensive survey on transfer learning. Proc. IEEE; 2020; 109, pp. 43–76. [Google Scholar] [CrossRef]
- Zhang, S.; Su, L.; Gu, J.; Li, K.; Zhou, L.; Pecht, M. Rotating machinery fault detection and diagnosis based on deep domain adaptation: A survey. Chin. J. Aeronaut. 2023, 36, 45–74. [Google Scholar] [CrossRef]
- Goodfellow, I.J.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016; Available online: http://www.deeplearningbook.org (accessed on 13 April 2023).
- Mwase, C.; Jin, Y.; Westerlund, T.; Tenhunen, H.; Zou, Z. Communication-efficient distributed AI strategies for the IoT edge. Future Gener. Comput. Syst. 2022, 131, 292–308. [Google Scholar] [CrossRef]
- Banbury, C.R.; Reddi, V.J.; Lam, M.; Fu, W.; Fazel, A.; Holleman, J.; Huang, X.; Hurtado, R.; Kanter, D.; Lokhmotov, A.; et al. Benchmarking tinyml systems: Challenges and direction. arXiv 2020. [Google Scholar] [CrossRef]
- Liu, H.; Song, P.; Qie, Y.; Li, Y. Real-time Prediction Method of Remaining Useful Life Based on TinyML. In Proceedings of the 2022 IEEE International Conference on Real-time Computing and Robotics (RCAR), Datong, China, 17–22 July 2022; pp. 693–698. [Google Scholar] [CrossRef]
- Islam, M.S.; Verma, H.; Khan, L.; Kantarcioglu, M. Secure Real-Time Heterogeneous IoT Data Management System. In Proceedings of the 2019 First IEEE International Conference on Trust, Privacy and Security in Intelligent Systems and Applications (TPS-ISA), Los Angeles, CA, USA, 14–17 December 2019; pp. 228–235. [Google Scholar] [CrossRef]
- Liu, H.; Wei, Z.; Zhang, H.; Li, B.; Zhao, C. Tiny Machine Learning (Tiny-ML) for Efficient Channel Estimation and Signal Detection. IEEE Trans. Veh. Technol. 2022, 71, 6795–6800. [Google Scholar] [CrossRef]
- Zaidi, S.A.R.; Hayajneh, A.M.; Hafeez, M.; Ahmed, Q.Z. Unlocking Edge Intelligence Through Tiny Machine Learning (TinyML). IEEE Access 2022, 10, 100867–100877. [Google Scholar] [CrossRef]
- Ren, H.; Anicic, D.; Runkler, T.A. TinyOL: TinyML with Online-Learning on Microcontrollers. In Proceedings of the 2021 International Joint Conference on Neural Networks (IJCNN), Shenzhen, China, 18–22 July 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Antonini, M.; Pincheira, M.; Vecchio, M.; Antonelli, F. An Adaptable and Unsupervised TinyML Anomaly Detection System for Extreme Industrial Environments. Sensors 2023, 23, 2344. [Google Scholar] [CrossRef]
- Tabanelli, E.; Tagliavini, G.; Benini, L. Optimizing Random Forest-Based Inference on RISC-V MCUs at the Extreme Edge. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2022, 41, 4516–4526. [Google Scholar] [CrossRef]
- Kopparapu, K.; Lin, E.; Breslin, J.G.; Sudharsan, B. TinyFedTL: Federated Transfer Learning on Ubiquitous Tiny IoT Devices. In Proceedings of the 2022 IEEE International Conference on Pervasive Computing and Communications Workshops and Other Affiliated Events (PerCom Workshops), Biarritz, France, 11–15 March 2022; pp. 79–81. [Google Scholar] [CrossRef]
- Costa, D.; Costa, M.; Pinto, S. Train Me If You Can: Decentralized Learning on the Deep Edge. Appl. Sci. 2022, 12, 4653. [Google Scholar] [CrossRef]
- Li, L.; Fan, Y.; Tse, M.; Lin, K.Y. A review of applications in federated learning. Comput. Ind. Eng. 2020, 149, 106854. [Google Scholar] [CrossRef]
- Hou, X.; Wang, J.; Jiang, C.; Zhang, X.; Ren, Y.; Debbah, M. UAV-Enabled Covert Federated Learning. IEEE Trans. Wirel. Commun. 2023, 1. [Google Scholar] [CrossRef]
- Li, T.; Sahu, A.K.; Talwalkar, A.; Smith, V. Federated Learning: Challenges, Methods, and Future Directions. IEEE Signal Process. Mag. 2020, 37, 50–60. [Google Scholar] [CrossRef]
- Li, H.; Ota, K.; Dong, M. Learning IoT in edge: Deep learning for the Internet of Things with edge computing. IEEE Netw. 2018, 32, 96–101. [Google Scholar] [CrossRef]
- AbdulRahman, S.; Tout, H.; Ould-Slimane, H.; Mourad, A.; Talhi, C.; Guizani, M. A survey on federated learning: The journey from centralized to distributed on-site learning and beyond. IEEE Internet Things J. 2020, 8, 5476–5497. [Google Scholar] [CrossRef]
- Berghout, T.; Benbouzid, M.; Bentrcia, T.; Lim, W.H.; Amirat, Y. Federated Learning for Condition Monitoring of Industrial Processes: A Review on Fault Diagnosis Methods, Challenges, and Prospects. Electronics 2022, 12, 158. [Google Scholar] [CrossRef]
- Ma, X.; Wen, C.; Wen, T. An Asynchronous and Real-Time Update Paradigm of Federated Learning for Fault Diagnosis. IEEE Trans. Ind. Inform. 2021, 17, 8531–8540. [Google Scholar] [CrossRef]
- Xu, Z.; Yang, Z.; Xiong, J.; Yang, J.; Chen, X. Elfish: Resource-aware federated learning on heterogeneous edge devices. Ratio 2019, 2, r2. [Google Scholar]
- Grau, M.M.; Centelles, R.P.; Freitag, F. On-Device Training of Machine Learning Models on Microcontrollers with a Look at Federated Learning. In Proceedings of the GoodIT ’21: Proceedings of the Conference on Information Technology for Social Good, Lisbon, Portugal, 6–8 September 2021; pp. 198–203. [Google Scholar] [CrossRef]
- Jin, J.; Ren, J.; Zhou, Y.; Lyu, L.; Liu, J.; Dou, D. Accelerated Federated Learning with Decoupled Adaptive Optimization. arXiv 2022. [Google Scholar] [CrossRef]
- Liu, W.; Chen, L.; Chen, Y.; Zhang, W. Accelerating Federated Learning via Momentum Gradient Descent. IEEE Trans. Parallel Distrib. Syst. 2019, 31, 1754–1766. [Google Scholar] [CrossRef]
- Ozfatura, E.; Ozfatura, K.; Gündüz, D. FedADC: Accelerated Federated Learning with Drift Control. In Proceedings of the 2021 IEEE International Symposium on Information Theory (ISIT), Espoo, Finland, 26 June–1 July 2021; pp. 467–472. [Google Scholar] [CrossRef]
- Xu, C.; Hong, Z.; Huang, M.; Jiang, T. Acceleration of Federated Learning with Alleviated Forgetting in Local Training. arXiv 2022. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, H.; Liu, J.; Xu, Y.; Huang, H.; Zhao, Y. Accelerating Federated Learning with Cluster Construction and Hierarchical Aggregation. IEEE Trans. Mob. Comput. 2022, 1. [Google Scholar] [CrossRef]
- Hanzely, F.; Hanzely, S.; Horváth, S.; Richtárik, P. Lower bounds and optimal algorithms for personalized federated learning. Adv. Neural Inf. Process. Syst. 2020, 33, 2304–2315. [Google Scholar]
- Xu, W.; Fang, W.; Ding, Y.; Zou, M.; Xiong, N. Accelerating Federated Learning for IoT in Big Data Analytics With Pruning, Quantization and Selective Updating. IEEE Access 2021, 9, 38457–38466. [Google Scholar] [CrossRef]
- Lee, H.S.; Lee, D.E. Resource allocation in wireless networks with federated learning: Network adaptability and learning acceleration. ICT Express 2022, 8, 31–36. [Google Scholar] [CrossRef]
- Li, L.; Xiong, H.; Guo, Z.; Wang, J.; Xu, C.Z. SmartPC: Hierarchical Pace Control in Real-Time Federated Learning System. In Proceedings of the 2019 IEEE Real-Time Systems Symposium (RTSS), Hong Kong, 3–6 December 2019; pp. 406–418. [Google Scholar] [CrossRef]
- Zhao, L.; Li, J.; Li, Q.; Li, F. A Federated Learning Framework for Detecting False Data Injection Attacks in Solar Farms. IEEE Trans. Power Electron. 2021, 37, 2496–2501. [Google Scholar] [CrossRef]
- Lin, J.; Ma, J.; Zhu, J. Hierarchical Federated Learning for Power Transformer Fault Diagnosis. IEEE Trans. Instrum. Meas. 2022, 71, 1–11. [Google Scholar] [CrossRef]
- Babu, P.; Parthasarathy, E. Reconfigurable FPGA architectures: A survey and applications. J. Inst. Eng. India Ser. B 2021, 102, 143–156. [Google Scholar] [CrossRef]
- Zhang, S. Artificial Intelligence in Electric Machine Drives: Advances and Trends. arXiv 2021. [Google Scholar] [CrossRef]
- Jiao, B.; Zhang, J.; Xie, Y.; Wang, S.; Zhu, H.; Kang, X.; Dong, Z.; Zhang, L.; Chen, C. A 0.57-GOPS/DSP Object Detection PIM Accelerator on FPGA. In Proceedings of the ASPDAC’21: Proceedings of the 26th Asia and South Pacific Design Automation Conference; Tokyo, Japan, 18–21 January 2021, pp. 13–14. [CrossRef]
- Bryant, R.E.; O’Hallaron, D.R. Computer Systems: A Programmer’s Perspective, 2nd ed.; Addison-Wesley Publishing Company: Boston, MA, USA, 2010. [Google Scholar]
- Bringmann, O.; Ecker, W.; Feldner, I.; Frischknecht, A.; Gerum, C.; Hämäläinen, T.; Hanif, M.A.; Klaiber, M.J.; Mueller-Gritschneder, D.; Bernardo, P.P.; et al. Automated HW/SW co-design for edge AI. In Proceedings of the CODES/ISSS ’21: Proceedings of the 2021 International Conference on Hardware/Software Codesign and System Synthesis, Virtual Conference, 8–15 October 2021; pp. 11–20. [Google Scholar] [CrossRef]
- Kalapothas, S.; Galetakis, M.; Flamis, G.; Plessas, F.; Kitsos, P. A Survey on RISC-V-Based Machine Learning Ecosystem. Information 2023, 14, 64. [Google Scholar] [CrossRef]
- Rodrigues, C.; Marques, I.; Pinto, S.; Gomes, T.; Tavares, A. Towards a Heterogeneous Fault-Tolerance Architecture based on Arm and RISC-V Processors. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 September 2019; pp. 3112–3117. [Google Scholar] [CrossRef]
- Sanchez-Flores, A.; Alvarez, L.; Alorda-Ladaria, B. A review of CNN accelerators for embedded systems based on RISC-V. In Proceedings of the 2022 IEEE International Conference on Omni-Layer Intelligent Systems (COINS), Barcelona, Spain, 1–3 August 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, C.; Xiang, X.; Liu, C.; Shang, Y.; Guo, R.; Liu, D.; Lu, Y.; Hao, Z.; Luo, J.; Chen, Z.; et al. Xuantie-910: A Commercial Multi-Core 12-Stage Pipeline Out-of-Order 64-bit High Performance RISC-V Processor with Vector Extension: Industrial Product. In Proceedings of the 2020 ACM/IEEE 47th Annual International Symposium on Computer Architecture (ISCA), Valencia, Spain, 30 May–3 June 2020; pp. 52–64. [Google Scholar] [CrossRef]
- Prakash, S.; Callahan, T.; Bushagour, J.; Banbury, C.; Green, A.V.; Warden, P.; Ansell, T.; Reddi, V.J. Cfu playground: Full-stack open-source framework for tiny machine learning (tinyml) acceleration on fpgas. arXiv 2022. [Google Scholar] [CrossRef]
- Bruschi, N.; Haugou, G.; Tagliavini, G.; Conti, F.; Benini, L.; Rossi, D. GVSoC: A Highly Configurable, Fast and Accurate Full-Platform Simulator for RISC-V based IoT Processors. In Proceedings of the 2021 IEEE 39th International Conference on Computer Design (ICCD), Storrs, CT, USA, 24–27 October 2021; pp. 409–416. [Google Scholar] [CrossRef]
- Eggimann, M.; Mach, S.; Magno, M.; Benini, L. A RISC-V Based Open Hardware Platform for Always-On Wearable Smart Sensing. In Proceedings of the 2019 IEEE 8th International Workshop on Advances in Sensors and Interfaces (IWASI), Otranto, Italy, 13–14 June 2019; pp. 169–174. [Google Scholar] [CrossRef]
- Girolamo, S.D.; Kurth, A.; Calotoiu, A.; Benz, T.; Schneider, T.; Beranek, J.; Benini, L.; Hoefler, T. A RISC-V in-network accelerator for flexible high-performance low-power packet processing. In Proceedings of the 2021 ACM/IEEE 48th Annual International Symposium on Computer Architecture (ISCA), Valencia, Spain, 14–18 June 2021; pp. 958–971. [Google Scholar] [CrossRef]
- He, C.; Cao, M.; Liu, J.; Ge, Z.; Zhou, R.; Xu, H. Nanotechnology in the Olympic Winter Games and beyond. ACS Nano 2022, 16, 4981–4988. [Google Scholar] [CrossRef]
- Schulz, S.; Cruanes, S.; Vukmirović, P. Faster, Higher, Stronger: E 2.3. In Proceedings of the Automated Deduction—CADE 27, Natal, Brazil, 27–30 August 2019; Fontaine, P., Ed.; Springer International Publishing: Cham, Switzerland, 2019; pp. 495–507. [Google Scholar]
- Dong, X.; Gao, Y.; Guo, J.; Zuo, S.; Xiang, J.; Li, D.; Tu, Z. An Integrated UWB-IMU-Vision Framework for Autonomous Approaching and Landing of UAVs. Aerospace 2022, 9, 797. [Google Scholar] [CrossRef]
- Rodriguez-Ramos, A.; Sampedro, C.; Bavle, H.; De La Puente, P.; Campoy, P. A deep reinforcement learning strategy for UAV autonomous landing on a moving platform. J. Intell. Robot. Syst. 2019, 93, 351–366. [Google Scholar] [CrossRef]
- Li, M.; Hu, T. Deep learning enabled localization for UAV autolanding. Chin. J. Aeronaut. 2021, 34, 585–600. [Google Scholar] [CrossRef]
- Lee, M.; Shin, S.G.; Jang, S.; Cho, W.; Kim, S.; Han, S.; Choi, C.; Kim, J.; Kim, Y.; Kim, S.H. Visual-based Landing Guidance System of UAV with Deep Learning Technique for Environments of Visual-detection Impairment. Int. J. Control. Autom. Syst. 2022, 20, 1735–1744. [Google Scholar] [CrossRef]
- Abaspur Kazerouni, I.; Fitzgerald, L.; Dooly, G.; Toal, D. A survey of state-of-the-art on visual SLAM. Expert Syst. Appl. 2022, 205, 117734. [Google Scholar] [CrossRef]
- Xin, L.; Tang, Z.; Gai, W.; Liu, H. Vision-Based Autonomous Landing for the UAV: A Review. Aerospace 2022, 9, 634. [Google Scholar] [CrossRef]
- Chaurasia, R.; Mohindru, V. Unmanned aerial vehicle (UAV): A comprehensive survey. In Unmanned Aerial Vehicles for Internet of Things (IoT) Concepts, Techniques, and Applications; Wiley: Hoboken, NJ, USA, 2021; pp. 1–27. [Google Scholar] [CrossRef]
- Li, J.; Gao, W.; Wu, Y.; Liu, Y.; Shen, Y. High-quality indoor scene 3D reconstruction with RGB-D cameras: A brief review. Comput. Vis. Media 2022, 8, 369–393. [Google Scholar] [CrossRef]
- Tang, H.; Zhang, D.; Gan, Z. Control System for Vertical Take-Off and Landing Vehicle’s Adaptive Landing Based on Multi-Sensor Data Fusion. Sensors 2020, 20, 4411. [Google Scholar] [CrossRef] [PubMed]
- Paredes, J.A.; Álvarez, F.J.; Aguilera, T.; Villadangos, J.M. 3D indoor positioning of UAVs with spread spectrum ultrasound and time-of-flight cameras. Sensors 2017, 18, 89. [Google Scholar] [CrossRef] [PubMed]
- Paredes, J.A.; Álvarez, F.J.; Aguilera, T.; Aranda, F.J. Precise drone location and tracking by adaptive matched filtering from a top-view ToF camera. Expert Syst. Appl. 2020, 141, 112989. [Google Scholar] [CrossRef]
- Demirhan, M.; Premachandra, C. Development of an Automated Camera-Based Drone Landing System. IEEE Access 2020, 8, 202111–202121. [Google Scholar] [CrossRef]
- Massoud, A.; Fahmy, A.; Iqbal, U.; Givigi, S.; Noureldin, A. Real-Time Safe Landing Zone Identification Based on Airborne LiDAR. Sensors 2023, 23, 3491. [Google Scholar] [CrossRef]
- Zeng, T.; Wang, H.; Sun, X.; Li, H.; Lu, Z.; Tong, F.; Cheng, H.; Zheng, C.; Zhang, M. Dual-channel LIDAR searching, positioning, tracking and landing system for rotorcraft from ships at sea. J. Navig. 2022, 75, 901–927. [Google Scholar] [CrossRef]
- Yan, L.; Qi, J.; Wang, M.; Wu, C.; Xin, J. A Safe Landing Site Selection Method of UAVs Based on LiDAR Point Clouds. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 6497–6502. [Google Scholar] [CrossRef]
- Ariante, G.; Ponte, S.; Papa, U.; Del Core, G. Safe Landing Area Determination (SLAD) for Unmanned Aircraft Systems by using rotary LiDAR. In Proceedings of the 2021 IEEE 8th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Virtual Conference, 2–25 June 2021; pp. 110–115. [Google Scholar] [CrossRef]
- Navardi, M.; Humes, E.; Mohsenin, T. E2EdgeAI: Energy-Efficient Edge Computing for Deployment of Vision-Based DNNs on Autonomous Tiny Drones. In Proceedings of the 2022 IEEE/ACM 7th Symposium on Edge Computing (SEC), Seattle, WA, USA, 5–8 December 2022; pp. 504–509. [Google Scholar] [CrossRef]
- Liu, K.; Zhou, X.; Zhao, B.; Ou, H.; Chen, B.M. An Integrated Visual System for Unmanned Aerial Vehicles Following Ground Vehicles: Simulations and Experiments. In Proceedings of the 2022 IEEE 17th International Conference on Control & Automation (ICCA), Naples, Italy, 27–30 July 2022; pp. 593–598. [Google Scholar] [CrossRef]
- Palossi, D.; Loquercio, A.; Conti, F.; Flamand, E.; Scaramuzza, D.; Benini, L. A 64-mW DNN-Based Visual Navigation Engine for Autonomous Nano-Drones. IEEE Internet Things J. 2019, 6, 8357–8371. [Google Scholar] [CrossRef]
- Albanese, A.; Nardello, M.; Brunelli, D. Low-power deep learning edge computing platform for resource constrained lightweight compact UAVs. Sustain. Comput. Inform. Syst. 2022, 34, 100725. [Google Scholar] [CrossRef]
- Delgado, R.; You, B.J.; Choi, B.W. Real-time control architecture based on Xenomai using ROS packages for a service robot. J. Syst. Softw. 2019, 151, 8–19. [Google Scholar] [CrossRef]
- Chen, W.; Jing, Z. Improved real-time visual servo system by combining Xenomai with Linux system. In Proceedings of the 2022 International Conference on Advanced Mechatronic Systems (ICAMechS), Toyama, Japan, 17–20 December 2022; pp. 199–202. [Google Scholar] [CrossRef]
- Zhang, Y.; Tao, L. Multi-channel Data acquisition system based on FPGA and STM32. Xibei Gongye Daxue Xuebao J. Northwestern Polytech. Univ. 2020, 38, 351–358. [Google Scholar] [CrossRef]
- Odavic, M.; Sumner, M.; Wheeler, P.; Li, J. Real-time fault diagnostics for a permanent magnet synchronous motor drive for aerospace applications. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2010; pp. 3044–3049. [Google Scholar] [CrossRef]
- Constantinides, G.A.; Chen, D.; Zhang, C.; Li, P.; Sun, G.; Guan, Y.; Xiao, B.; Cong, J. Optimizing FPGA-based Accelerator Design for Deep Convolutional Neural Networks. In Proceedings of the 2015 ACM/SIGDA International Symposium on Field-Programmable Gate Arrays, Monterey, CA, USA, 22–24 February 2015; pp. 161–170. [Google Scholar] [CrossRef]
- Kong, Y. AIRV: Enabling Deep Learning Inference on RISC-V. In Proceedings of the Benchmarking, Measuring, and Optimizing: Second BenchCouncil International Symposium, Bench 2019, Denver, CO, USA, 14–16 November 2019; Revised Selected Papers 2. Springer: Berlin, Germany, 2020; pp. 91–98. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 July 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Smith, R.J.; Amaral, R.; Heywood, M.I. Evolving Simple Solutions to the CIFAR-10 Benchmark using Tangled Program Graphs. In Proceedings of the 2021 IEEE Congress on Evolutionary Computation (CEC), Kraków, Poland, 28 June–1 July 2021; pp. 2061–2068. [Google Scholar] [CrossRef]
- Assir, I.A.; Iskandarani, M.E.; Sandid, H.R.A.; Saghir, M.A. Arrow: A RISC-V vector accelerator for machine learning inference. arXiv 2021. [Google Scholar] [CrossRef]
- Kovačević, N.; Mišeljić, Đ.; Stojković, A. RISC-V vector processor for acceleration of machine learning algorithms. In Proceedings of the 2022 30th Telecommunications Forum (TELFOR), Belgrade, Serbia, 21–22 November 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Richter, M.; Luedecke, A.; Lee, Y.C.; Stanitzki, A.; Utz, A.; Grau, G.; Kappert, H.; Kokozinski, R. A RISC-V-based System on Chip for High-Speed Control in Safety-Critical 650 V GaN-Applications. In Proceedings of the SMACD/PRIME 2021: International Conference on SMACD and 16th Conference on PRIME VDE, online, 19–22 July 2021; pp. 1–4. [Google Scholar]
- Zimmer, B.; Lee, Y.; Puggelli, A.; Kwak, J.; Jevti, R.; Keller, B.; Bailey, S.; Blagojevi, M.; Chiu, P.F.; Le, H.P.; et al. A RISC-V Vector Processor With Simultaneous-Switching Switched-Capacitor DC–DC Converters in 28 nm FDSOI. IEEE J. Solid-State Circuits 2016, 51, 930–942. [Google Scholar] [CrossRef]
- Al-Safi, A.; Al-Khayyat, A.; Manati, A.M.; Alhafadhi, L. Advances in FPGA Based PWM Generation for Power Electronics Applications: Literature Review. In Proceedings of the 2020 11th IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 4–7 November 2020; pp. 252–259. [Google Scholar] [CrossRef]
- Retschi, A.; Syrpas, P.; Flak, B.; Tomzik, K.; Steimer, P.K. Heterogeneous Control Platform Design for Power Conversion Systems. IEEE Trans. Ind. Inform. 2020, 18, 2934–2942. [Google Scholar] [CrossRef]
- Kumar, R.R.; Andriollo, M.; Cirrincione, G.; Cirrincione, M.; Tortella, A. A Comprehensive Review of Conventional and Intelligence-Based Approaches for the Fault Diagnosis and Condition Monitoring of Induction Motors. Energies 2022, 15, 8938. [Google Scholar] [CrossRef]
- Deeb, M.; Kotelenets, N.F. Fault Diagnosis of 3-phase Induction Machine Using Harmonic Content of Stator Current Spectrum. In Proceedings of the 2020 International Youth Conference on Radio Electronics, Electrical and Power Engineering (REEPE), Moscow, Russia, 12–14 March 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Swakath, S.U.; Kshirsagar, A.; Kondepu, K.; Banavath, S.N.; Chub, A.; Vinnikov, D. Development of a Power Electronics Controller with RISC-V based Core for Security-Critical Applications. In Proceedings of the 2022 IEEE 63th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 10–12 October 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Schiavone, P.D.; Rossi, D.; Mauro, A.D.; Gürkaynak, F.K.; Saxe, T.; Wang, M.; Yap, K.C.; Benini, L. Arnold: An eFPGA-Augmented RISC-V SoC for Flexible and Low-Power IoT End Nodes. IEEE Trans. Very Large Scale Integr. Syst. 2021, 29, 677–690. [Google Scholar] [CrossRef]
- Keller, B.; Cochet, M.; Zimmer, B.; Kwak, J.; Puggelli, A.; Lee, Y.; Blagojevic, M.; Bailey, S.; Chiu, P.F.; Dabbelt, P.; et al. A RISC-V Processor SoC with Integrated Power Management at Submicrosecond Timescales in 28 nm FD-SOI. IEEE J. -Solid-State Circuits 2017, 52, 1863–1875. [Google Scholar] [CrossRef]
- Kühne, J.; Magno, M.; Benini, L. Parallelizing Optical Flow Estimation on an Ultra-Low Power RISC-V Cluster for Nano-UAV Navigation. In Proceedings of the 2022 IEEE International Symposium on Circuits and Systems (ISCAS), Austin, TX, USA, 27 May–1 June 2022; pp. 301–305. [Google Scholar]
- De Prado, M.; Rusci, M.; Capotondi, A.; Donze, R.; Benini, L.; Pazos, N. Robustifying the Deployment of tinyML Models for Autonomous Mini-Vehicles. Sensors 2021, 21, 1339. [Google Scholar] [CrossRef]
- Meng, F.; Wang, C.; Liu, Z.; Ma, K.; Disney, D.; Yeo, K.S. Heterogeneous Integration: A Promising Technology to Future Integrated Power Conversion Electronics. IEEE Power Electron. Mag. 2021, 8, 37–47. [Google Scholar] [CrossRef]
- Krishnan, S.; Tambe, T.; Wan, Z.; Reddi, V.J. AutoSoC: Automating Algorithm-SOC Co-design for Aerial Robots. arXiv 2021. [Google Scholar] [CrossRef]
- Boroujerdian, B.; Genc, H.; Krishnan, S.; Cui, W.; Faust, A.; Reddi, V. Mavbench: Micro aerial vehicle benchmarking. In Proceedings of the 2018 51st Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Fukuoka, Japan, 20–24 October 2018; pp. 894–907. [Google Scholar] [CrossRef]
- Mayoral-Vilches, V.; Corradi, G. Adaptive Computing in Robotics, Leveraging ROS 2 to Enable Software-Defined Hardware for FPGAs. arXiv 2021. [Google Scholar] [CrossRef]
- Lee, S.Y.; Hung, Y.W.; Chang, Y.T.; Lin, C.C.; Shieh, G.S. RISC-V CNN Coprocessor for Real-Time Epilepsy Detection in Wearable Application. IEEE Trans. Biomed. Circuits Syst. 2021, 15, 679–691. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Chen, H.; Young, J.; Kim, H. RISC-V FPGA Platform toward ROS-based Robotics Application. In Proceedings of the 2020 30th International Conference on Field-Programmable Logic and Applications (FPL), Gothenburg, Sweden, 31 August–4 September 2020; p. 370. [Google Scholar] [CrossRef]
- Zhang, X.; Ma, Y.; Xiong, J.; Hwu, W.M.W.; Kindratenko, V.; Chen, D. Exploring HW/SW Co-Design for Video Analysis on CPU-FPGA Heterogeneous Systems. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2022, 41, 1606–1619. [Google Scholar] [CrossRef]
- Wan, Z.; Lele, A.S.; Raychowdhury, A. Circuit and System Technologies for Energy-Efficient Edge Robotics. arXiv 2022. [Google Scholar] [CrossRef]
- Wang, Z.; Che, B.; Guo, L.; Du, Y.; Chen, Y.; Zhao, J.; He, W. PipeFL: Hardware/Software co-Design of an FPGA Accelerator for Federated Learning. IEEE Access 2022, 10, 98649–98661. [Google Scholar] [CrossRef]
- Kwon, J.; Park, D. Hardware/Software Co-Design for TinyML Voice-Recognition Application on Resource Frugal Edge Devices. Appl. Sci. 2021, 11, 11073. [Google Scholar] [CrossRef]
- Zhou, C.; Redondo, F.G.; Buchel, J.; Boybat, I.; Comas, X.T.; Nandakumar, S.R.; Das, S.; Sebastian, A.; Gallo, M.L.; Whatmough, P.N. ML-HW Co-Design of Noise-Robust TinyML Models and Always-On Analog Compute-in-Memory Edge Accelerator. IEEE Micro 2022, 42, 76–87. [Google Scholar] [CrossRef]
- Yan, H.; Xu, Y.; Cai, F.; Zhang, H.; Zhao, W.; Gerada, C. PWM-VSI fault diagnosis for a PMSM drive based on the fuzzy logic approach. IEEE Trans. Power Electron. 2018, 34, 759–768. [Google Scholar] [CrossRef]
- Xu, D.; Wang, B.; Zhang, G.; Wang, G.; Yu, Y. A review of sensorless control methods for AC motor drives. CES Trans. Electr. Mach. Syst. 2018, 2, 104–115. [Google Scholar] [CrossRef]
- Zine, W.; Makni, Z.; Monmasson, E.; Idkhajine, L.; Condamin, B. Interests and limits of machine learning-based neural networks for rotor position estimation in EV traction drives. IEEE Trans. Ind. Inform. 2017, 14, 1942–1951. [Google Scholar] [CrossRef]
- Fuller, A.; Fan, Z.; Day, C.; Barlow, C. Digital Twin: Enabling Technologies, Challenges and Open Research. IEEE Access 2020, 8, 108952–108971. [Google Scholar] [CrossRef]
- Madni, A.M.; Madni, C.C.; Lucero, S.D. Leveraging digital twin technology in model-based systems engineering. Systems 2019, 7, 7. [Google Scholar] [CrossRef]
- Kapteyn, M.G.; Pretorius, J.V.; Willcox, K.E. A probabilistic graphical model foundation for enabling predictive digital twins at scale. Nat. Comput. Sci. 2021, 1, 337–347. [Google Scholar] [CrossRef]
- Kapteyn, M.G.; Willcox, K.E. From physics-based models to predictive digital twins via interpretable machine learning. arXiv 2020. [Google Scholar] [CrossRef]
- Wang, M.Y.; Wang, D.F. A Desktop Electric Machine Emulator Implementation Method Based on Phase Voltage Reconstruction. IEEE Access 2020, 8, 97698–97706. [Google Scholar] [CrossRef]
- Xiong, J.; Ye, H.; Pei, W.; Li, K.; Han, Y. Real-time FPGA-digital twin monitoring and diagnostics for PET applications. In Proceedings of the 2021 6th Asia Conference on Power and Electrical Engineering (ACPEE), Chongqing, China, 4–11 April 2021; pp. 531–536. [Google Scholar] [CrossRef]
- Mulinka, P.; Sahoo, S.; Kalalas, C.; Nardelli, P.H.J. Optimizing a Digital Twin for Fault Diagnosis in Grid Connected Inverters—A Bayesian Approach. In Proceedings of the 2022 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 9–13 October2022; pp. 1–6. [Google Scholar] [CrossRef]
- Milton, M.; Castulo, D.L.O.; Ginn, H.L.; Benigni, A. Controller-Embeddable Probabilistic Real-Time Digital Twins for Power Electronic Converter Diagnostics. IEEE Trans. Power Electron. 2020, 35, 9850–9864. [Google Scholar] [CrossRef]
- Milton, M.; Benigni, A. ORTiS solver codegen: C++ code generation tools for high performance, FPGA-based, real-time simulation of power electronic systems. SoftwareX 2021, 13, 100660. [Google Scholar] [CrossRef]
- Gu, C.; Yan, H.; Yang, J.; Sala, G.; De Gaetano, D.; Wang, X.; Galassini, A.; Degano, M.; Zhang, X.; Buticchi, G. A Multiport Power Conversion System for the More Electric Aircraft. IEEE Trans. Transp. Electrif. 2020, 6, 1707–1720. [Google Scholar] [CrossRef]
- Wang, G.; Qiu, G.; Zhao, W.; Chen, X.; Li, J. A real-time visual compass from two planes for indoor unmanned aerial vehicles (UAVs). Expert Syst. Appl. 2023, 120390. [Google Scholar] [CrossRef]
- Wang, H.; Gu, C.; Wang, S.; Zhao, W.; Bai, S.; Buticchi, G.; Gerada, C.; Zhang, H. Single-Phase Short-Circuit Fault Tolerant Control for Five-Phase Permanent Magnet Machines With Copper Loss Reduction. IEEE Trans. Ind. Electron. 2023, 70, 11087–11097. [Google Scholar] [CrossRef]
- Dash, B.; Ansari, M.F.; Swayamsiddha, S. Fusion of Artificial Intelligence and 5G in Defining Future UAV Technologies—A Review. In Proceedings of the 2023 International Conference on Device Intelligence, Computing and Communication Technologies, (DICCT), Dehradun, India, 17–18 May 2023; pp. 312–316. [Google Scholar] [CrossRef]
- Ducard, G.J.; Allenspach, M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 107035. [Google Scholar] [CrossRef]
- Lim, W.Y.B.; Garg, S.; Xiong, Z.; Zhang, Y.; Niyato, D.; Leung, C.; Miao, C. UAV-Assisted Communication Efficient Federated Learning in the Era of the Artificial Intelligence of Things. IEEE Netw. 2021, 35, 188–195. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Y.; Zhu, K.; Zhang, Y.; Li, Y. Diagnosis of Interturn Short-Circuit Faults in Permanent Magnet Synchronous Motors Based on Few-Shot Learning Under a Federated Learning Framework. IEEE Trans. Ind. Inform. 2021, 17, 8495–8504. [Google Scholar] [CrossRef]
- Mowla, N.I.; Tran, N.H.; Doh, I.; Chae, K. Federated learning-based cognitive detection of jamming attack in flying ad hoc network. IEEE Access 2019, 8, 4338–4350. [Google Scholar] [CrossRef]
- Wan, Z.; Anwar, A.; Mahmoud, A.; Jia, T.; Hsiao, Y.S.; Reddi, V.J.; Raychowdhury, A. FRL-FI: Transient Fault Analysis for Federated Reinforcement Learning-Based Navigation Systems. In Proceedings of the 2022 Design, Automation & Test in Europe Conference & Exhibition (DATE), Antwerp, Belgium, 14–23 March 2022; pp. 430–435. [Google Scholar] [CrossRef]
- Tang, S.; Zhou, W.; Chen, L.; Lai, L.; Xia, J.; Fan, L. Battery-constrained federated edge learning in UAV-enabled IoT for B5G/6G networks. Phys. Commun. 2021, 47, 101381. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, X.; Li, J.; Wang, H.; Zhang, F.; Zhang, H.; Zhu, X.; Gerada, D. Heat Pipe Bending Effect on Cooling Effectiveness in Electrical Machines. IEEE Trans. Energy Convers. 2023, 1–11. [Google Scholar] [CrossRef]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. UAVs as Mobile Infrastructure: Addressing Battery Lifetime. IEEE Commun. Mag. 2019, 57, 132–137. [Google Scholar] [CrossRef]
- Ahmed, S.; Mohamed, A.; Harras, K.; Kholief, M.; Mesbah, S. Energy efficient path planning techniques for UAV-based systems with space discretization. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Li, Y.; Liu, M. Path Planning of Electric VTOL UAV Considering Minimum Energy Consumption in Urban Areas. Sustainability 2022, 14, 3421. [Google Scholar] [CrossRef]
- Warden, P.; Situnayake, D. Tinyml: Machine Learning with Tensorflow Lite on Arduino and Ultra-Low-Power Microcontrollers; O’Reilly Media: Sebastopol, CA, USA, 2019. [Google Scholar]
- Jin, T.; Bercea, G.T.; Le, T.D.; Chen, T.; Su, G.; Imai, H.; Negishi, Y.; Leu, A.; O’Brien, K.; Kawachiya, K.; et al. Compiling onnx neural network models using mlir. arXiv 2020, arXiv:2008.08272. [Google Scholar]
- Peng, Y.; Wang, Y. An industrial-grade solution for agricultural image classification tasks. Comput. Electron. Agric. 2021, 187, 106253. [Google Scholar] [CrossRef]
- Hashesh, A.O.; Hashima, S.; Zaki, R.M.; Fouda, M.M.; Hatano, K.; Eldien, A.S.T. AI-Enabled UAV Communications: Challenges and Future Directions. IEEE Access 2022, 10, 92048–92066. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Challenges | Methods | Implications |
|---|---|---|---|
| [39] | TinyMLaaS | ML-as-a-Service | Energy saving |
| [40] | TinyOL | Online-Learning | On-device training |
| [41] | Tiny-MLOps | ML Operations | Extreme environments suitability |
| [42] | MCU | RISC-V | Computational cost optimization |
| [43] | TinyFedTL | FL and TL | Open-source |
| Sensor | References | Method | Application |
|---|---|---|---|
| ToF | [88] | Data fusion based on a ToF, IMU, and an optical flow sensor | Adaptive landing |
| [89] | Hybrid combination of spread spectrum ultrasound and ToF | Indoor landing experiment | |
| [90] | A top-view ToF with adaptive matched filtering | GPS-denied environment | |
| [91] | Black-box and PID controller integration | Distinctive landing symbol detection | |
| Lidar | [92] | Safe Landing Zone (SLZ) identification | Landing zone for helicopters |
| [93] | Dual-channel with multi-pulse laser echo accumulation and the physical phenomenon with laser reflectivity | Landing system for ships at sea | |
| [94] | Point cloud progressing with Principal Component Analysis (PCA) and PROgressive SAmple Consensus (PROSAC) algorithms | Safe landing site selection | |
| [95] | On-board terrain hazard detection and avoidance (DAA) | Safety area identification |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Gu, C.; Li, J.; Wang, J.; Chen, X.; Zhang, H. Heterogeneous Flight Management System (FMS) Design for Unmanned Aerial Vehicles (UAVs): Current Stages, Challenges, and Opportunities. Drones 2023, 7, 380. https://doi.org/10.3390/drones7060380
Wang G, Gu C, Li J, Wang J, Chen X, Zhang H. Heterogeneous Flight Management System (FMS) Design for Unmanned Aerial Vehicles (UAVs): Current Stages, Challenges, and Opportunities. Drones. 2023; 7(6):380. https://doi.org/10.3390/drones7060380
Chicago/Turabian StyleWang, Gelin, Chunyang Gu, Jing Li, Jiqiang Wang, Xinmin Chen, and He Zhang. 2023. "Heterogeneous Flight Management System (FMS) Design for Unmanned Aerial Vehicles (UAVs): Current Stages, Challenges, and Opportunities" Drones 7, no. 6: 380. https://doi.org/10.3390/drones7060380
APA StyleWang, G., Gu, C., Li, J., Wang, J., Chen, X., & Zhang, H. (2023). Heterogeneous Flight Management System (FMS) Design for Unmanned Aerial Vehicles (UAVs): Current Stages, Challenges, and Opportunities. Drones, 7(6), 380. https://doi.org/10.3390/drones7060380