

Routine and Safe Operation of Remotely Piloted Aircraft Systems in Areas with High Densities of Flying Birds


Abstract
:1. Introduction
2. Materials and Methods
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
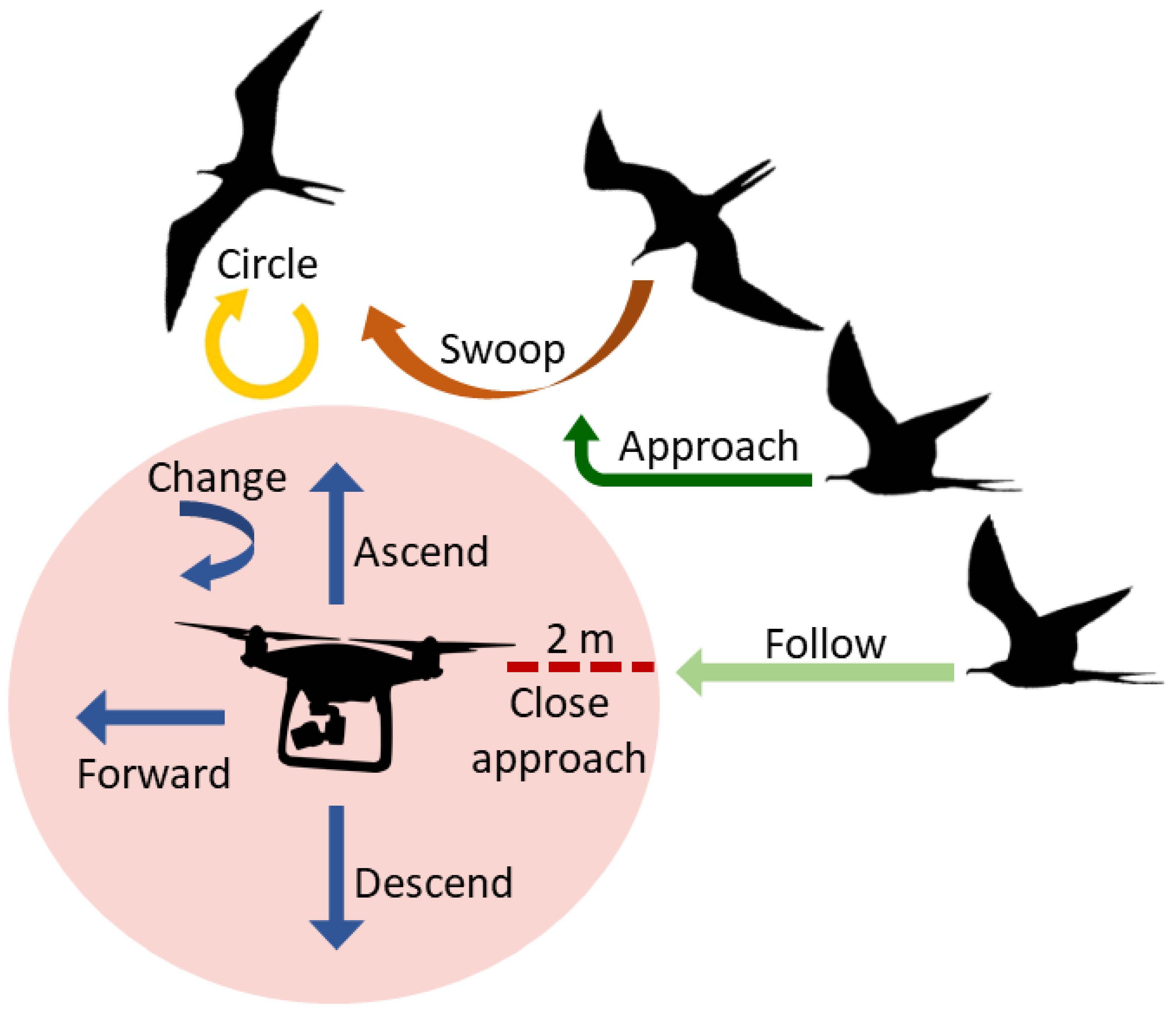
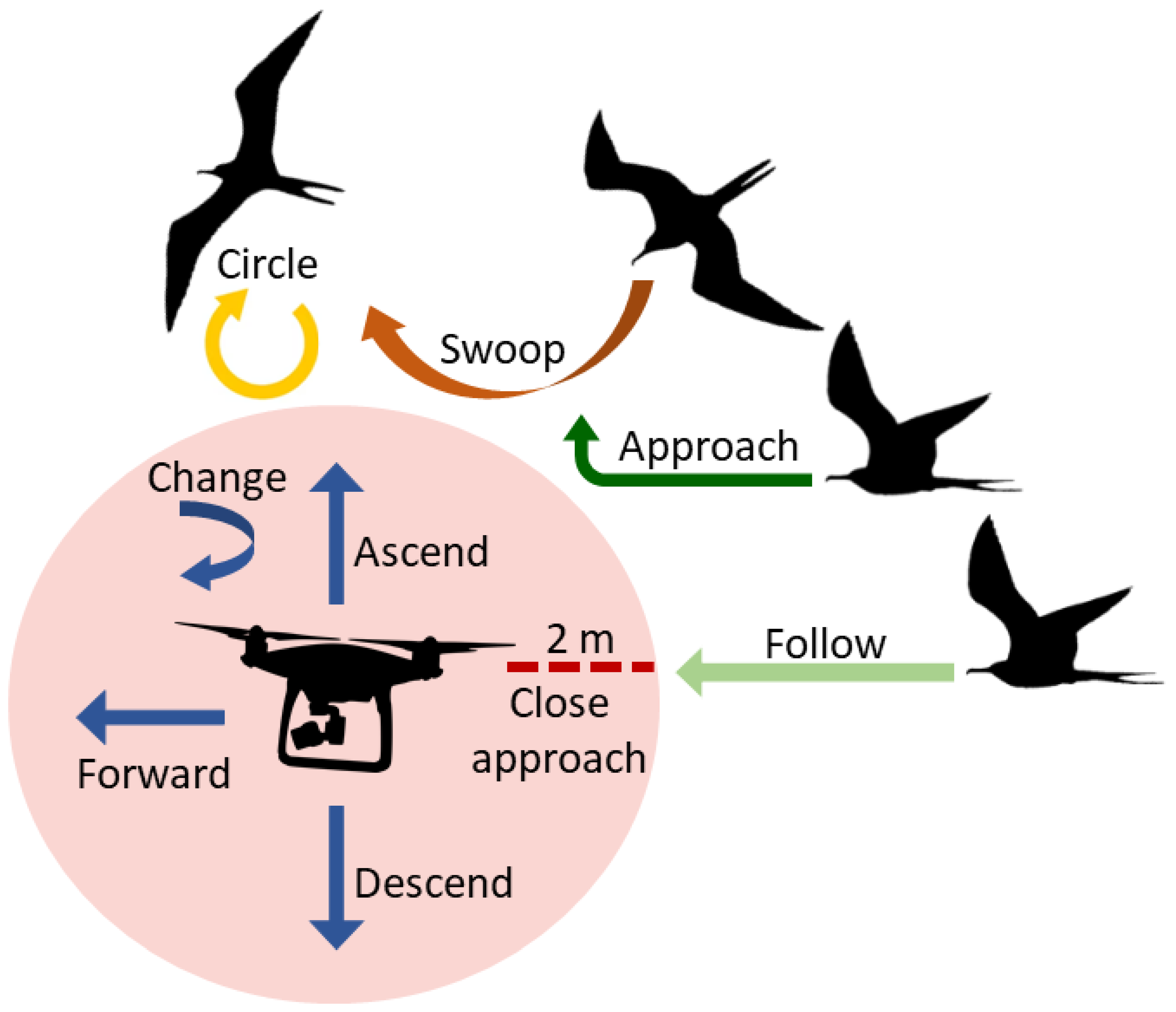
| Seabird Behavior | |
| Approach | A bird flies toward the aircraft, then deviates away. |
| Follow | A bird flies toward the aircraft and maintains proximity within 15 m. |
| Swoop | A bird dives at the aircraft. |
| Circle | A bird actively flies around above the aircraft. |
| Close approach | Any interaction where the bird came within 2 m of the aircraft. |
| RPAS Flight Motion | |
| Ascend | Aircraft gains altitude vertically without movement in the horizontal plane. |
| Descend | Aircraft loses altitude vertically without movement in the horizontal plane. |
| Forward | Aircraft flies in a straight line, e.g., along a straight-line transect. It may have a shallow ascent or descent, but the overall motion is forward flight. |
| Change of direction | Aircraft turns with forward movement to fly along a new course, e.g., at the end of a transect. |
| Static hover | Aircraft holds position without movement along the vertical or horizontal planes. |
References
- Alsafasfeh, M.; Abdel-Qader, I.; Bazuin, B.; Alsafasfeh, Q.; Su, W. Unsupervised Fault Detection and Analysis for Large Photovoltaic Systems Using Drones and Machine Vision. Energies 2018, 11, 2252. [Google Scholar] [CrossRef] [Green Version]
- Robinson, J.M.; Harrison, P.A.; Mavoa, S.; Breed, M.F. Existing and emerging uses of drones in restoration ecology. Methods Ecol. Evol. 2022, 13, 1899–1911. [Google Scholar] [CrossRef]
- Reis-Filho, J.A.; Joyeux, J.; Pimentel, C.R.; Teixeira, J.B.; Macieira, R.; Garla, R.C.; Mello, T.; Gasparini, J.L.; Giarrizzo, T.; Rocha, L.; et al. The challenges and opportunities of using small drones to monitor fishing activities in a marine protected area. Fish. Manag. Ecol. 2022, 29, 745–752. [Google Scholar] [CrossRef]
- Wirsing, A.J.; Johnston, A.N.; Kiszka, J.J. Foreword to the Special Issue on ‘The rapidly expanding role of drones as a tool for wildlife research’. Wildl. Res. 2022, 49, i–v. [Google Scholar] [CrossRef]
- Sorrell, K.J.; Clarke, R.H.; Holmberg, R.; McIntosh, R.R. Remotely piloted aircraft improve precision of capture–mark–resight population estimates of Australian fur seals. Ecosphere 2019, 10, e02812. [Google Scholar] [CrossRef] [Green Version]
- Hodgson, J.C.; Baylis, S.M.; Mott, R.; Herrod, A.; Clarke, R.H. Precision wildlife monitoring using unmanned aerial vehicles. Sci. Rep. 2016, 6, 22574. [Google Scholar] [CrossRef] [Green Version]
- Junda, J.H.; Greene, E.; Zazelenchuk, D.; Bird, D.M. Nest defense behaviour of four raptor species (osprey, bald eagle, ferruginous hawk, and red-tailed hawk) to a novel aerial intruder—A small rotary-winged drone. J. Unmanned Veh. Syst. 2016, 4, 217–227. [Google Scholar] [CrossRef]
- Vas, E.; Lescroël, A.; Duriez, O.; Boguszewski, G.; Grémillet, D. Approaching birds with drones: First experiments and ethical guidelines. Biol. Lett. 2015, 11, 20140754. [Google Scholar] [CrossRef] [Green Version]
- Lyons, M.; Brandis, K.; Callaghan, C.; McCann, J.; Mills, C.; Ryall, S.; Kingsford, R. Bird interactions with drones, from individuals to large colonies. Aust. Field Ornithol. 2018, 35, 51–56. [Google Scholar] [CrossRef] [Green Version]
- McIntosh, R.R.; Holmberg, R.; Dann, P. Looking Without Landing—Using Remote Piloted Aircraft to Monitor Fur Seal Populations Without Disturbance. Front. Mar. Sci. 2018, 5, 202. [Google Scholar] [CrossRef] [Green Version]
- Raoult, V.; Colefax, A.P.; Allan, B.M.; Cagnazzi, D.; Castelblanco-Martínez, N.; Ierodiaconou, D.; Johnston, D.W.; Landeo-Yauri, S.; Lyons, M.B.; Pirotta, V.; et al. Operational Protocols for the Use of Drones in Marine Animal Research. Drones 2020, 4, 64. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Koh, L.P. Best practice for minimising unmanned aerial vehicle disturbance to wildlife in biological field research. Curr. Biol. 2016, 26, R404–R405. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krause, D.J.; Hinke, J.T.; Goebel, M.E.; Perryman, W.L. Drones Minimize Antarctic Predator Responses Relative to Ground Survey Methods: An Appeal for Context in Policy Advice. Front. Mar. Sci. 2021, 8, 152. [Google Scholar] [CrossRef]
- Weimerskirch, H.; Prudor, A.; Schull, Q. Flights of drones over sub-Antarctic seabirds show species- and status-specific behavioural and physiological responses. Polar Biol. 2018, 41, 259–266. [Google Scholar] [CrossRef]
- Mulero-Pázmány, M.; Jenni-Eiermann, S.; Strebel, N.; Sattler, T.; Negro, J.J.; Tablado, Z. Unmanned aircraft systems as a new source of disturbance for wildlife: A systematic review. PLoS ONE 2017, 12, e0178448. [Google Scholar] [CrossRef] [Green Version]
- Rebolo-Ifrán, N.; Graña Grilli, M.; Lambertucci, S.A. Drones as a Threat to Wildlife: YouTube Complements Science in Providing Evidence about Their Effect. Environ. Conserv. 2019, 46, 205–210. [Google Scholar] [CrossRef]
- Weston, M.A.; O’brien, C.; Kostoglou, K.; Symonds, M.R.E. Escape responses of terrestrial and aquatic birds to drones: Towards a code of practice to minimize disturbance. J. Appl. Ecol. 2019, 57, 777–785. [Google Scholar] [CrossRef]
- Brisson-Curadeau, É.; Bird, D.; Burke, C.; Fifield, D.A.; Pace, P.; Sherley, R.B.; Elliott, K.H. Seabird species vary in behavioural response to drone census. Sci. Rep. 2017, 7, 17884. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Borrelle, S.B.; Fletcher, A.T. Will drones reduce investigator disturbance to surface-nesting seabirds? Mar. Ornithol. 2017, 45, 89–94. [Google Scholar]
- Pirotta, V.; Smith, A.; Ostrowski, M.; Russell, D.; Jonsen, I.D.; Grech, A.; Harcourt, R. An Economical Custom-Built Drone for Assessing Whale Health. Front. Mar. Sci. 2017, 4, 425. [Google Scholar] [CrossRef]
- de Leija, A.C.; Mirzadi, R.E.; Randall, J.M.; Portmann, M.D.; Mueller, E.J.; Gawlik, D.E. A meta-analysis of disturbance caused by drones on nesting birds. J. Field Ornithol. 2023, 94, 3. [Google Scholar] [CrossRef]
- Geldart, E.A.; Barnas, A.F.; Semeniuk, C.A.D.; Gilchrist, H.G.; Harris, C.M.; Love, O.P. A colonial-nesting seabird shows no heart-rate response to drone-based population surveys. Sci. Rep. 2022, 12, 18804. [Google Scholar] [CrossRef]
- Menkhorst, P.; Rogers, D.; Clarke, R.; Davies, J.; Marsack, P.; Franklin, K. The Australian Bird Guide; CSIRO Publishing: Clayton South, VIC, Australia, 2017. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2023; Available online: https://www.r-project.org/ (accessed on 25 May 2023).
- Ryckman, M.D.; Kemink, K.; Felege, C.J.; Darby, B.; Vandeberg, G.S.; Ellis-Felege, S.N. Behavioral responses of blue-winged teal and northern shoveler to unmanned aerial vehicle surveys. PLoS ONE 2022, 17, e0262393. [Google Scholar] [CrossRef]
- Rümmler, M.-C.; Mustafa, O.; Maercker, J.; Peter, H.-U.; Esefeld, J. Sensitivity of Adélie and Gentoo penguins to various flight activities of a micro UAV. Polar Biol. 2018, 41, 2481–2493. [Google Scholar] [CrossRef]
- Drever, M.C.; Chabot, D.; O’Hara, P.D.; Thomas, J.D.; Breault, A.; Millikin, R.L. Evaluation of an unmanned rotorcraft to monitor wintering waterbirds and coastal habitats in British Columbia, Canada. J. Unmanned Veh. Syst. 2015, 3, 256–267. [Google Scholar] [CrossRef]
- Gallego, D.; Sarasola, J.H. Using drones to reduce human disturbance while monitoring breeding status of an endangered raptor. Remote Sens. Ecol. Conserv. 2021, 7, 550–561. [Google Scholar] [CrossRef]
- Barnas, A.; Newman, R.; Felege, C.J.; Corcoran, M.P.; Hervey, S.D.; Stechmann, T.J.; Rockwell, R.F.; Ellis-Felege, S.N. Evaluating behavioral responses of nesting lesser snow geese to unmanned aircraft surveys. Ecol. Evol. 2017, 8, 1328–1338. [Google Scholar] [CrossRef] [Green Version]
- McEvoy, J.F.; Hall, G.P.; McDonald, P.G. Evaluation of unmanned aerial vehicle shape, flight path and camera type for waterfowl surveys: Disturbance effects and species recognition. PeerJ 2016, 4, e1831. [Google Scholar] [CrossRef] [Green Version]
- Gray, E.; Weston, M.A. Pilot perceptions of options to manage drone-wildlife interactions; associations with wildlife value orientations and connectedness to nature. J. Nat. Conserv. 2021, 64, 126090. [Google Scholar] [CrossRef]
- Reintsma, K.M.; McGowan, P.C.; Callahan, C.; Collier, T.; Gray, D.; Sullivan, J.D.; Prosser, D.J.; Reintsma, K.M.; McGowan, P.C.; Callahan, C.; et al. Preliminary Evaluation of Behavioral Response of Nesting Waterbirds to Small Unmanned Aircraft Flight. Waterbirds 2018, 41, 326–331. [Google Scholar] [CrossRef]
- Bêty, J.; Gauthier, G. Effects of nest visits on predator activity and predation rate in a greater snow goose colony. J. Field Ornithol. 2001, 72, 573–586. [Google Scholar] [CrossRef]
- Kennedy, E.S.; Pachlatko, T. Footwear to allow researchers to cross densely burrowed terrain without damage to seabird habitat. Mar. Ornithol. 2012, 40, 53–56. [Google Scholar]
- Carey, M.J. The effects of investigator disturbance on procellariiform seabirds: A review. N. Z. J. Zool. 2009, 36, 367–377. [Google Scholar] [CrossRef] [Green Version]
- Woehler, E.; Riddle, M.; Ribic, C. Long-Term Population Trends in Southern Giant Petrels in East Antarctica. In Antarctic Biology in a Global Context; Backhuys Publishers: Leiden, The Netherlands, 2003; pp. 290–295. [Google Scholar]
- Fudala, K.; Bialik, R.J. The use of drone-based aerial photogrammetry in population monitoring of Southern Giant Petrels in ASMA 1, King George Island, maritime Antarctica. Glob. Ecol. Conserv. 2021, 33, e01990. [Google Scholar] [CrossRef]
| RPAS Flight Type * | Bird Interaction Behavior * | Minimum Distance from RPAS (m) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Christmas | Pulu Keeling | Christmas | Pulu Keeling | Christmas | Pulu Keeling | ||||
| Number of Interactions | Number of Interactions | Mean (SD) | Range | Mean (SD) | Range | ||||
| Forward | 486 | 52 | Approach | 364 | 8 | 6.33 | 1–15 | 6.84 | 0.5–15 |
| Circle | - | 1 | (3.73) | (3.28) | |||||
| Follow | 39 | 33 | |||||||
| Close approach | 64 | 5 | |||||||
| Swoop | 19 | 5 | |||||||
| Ascend | 30 | 5 | Approach | 25 | 1 | 6.10 | 2–15 | 3.00 | 1–5 |
| Circle | - | 1 | (3.64) | (1.87) | |||||
| Close approach | 5 | 3 | |||||||
| Descend | 30 | 5 | Approach | 26 | 2 | 6.73 | 2–15 | 3.60 | 2–8 |
| Follow | 1 | - | (3.50) | (2.51) | |||||
| Close approach | 1 | 2 | |||||||
| Swoop | 2 | 1 | |||||||
| Change | 24 | 13 | Approach | 21 | 4 | 6.54 | 2–10 | 4.38 | 2–10 |
| Circle | - | 2 | (2.75) | (2.47) | |||||
| Follow | 1 | 1 | |||||||
| Close approach | 1 | 5 | |||||||
| Swoop | 1 | 1 | |||||||
| Hover | 10 | 1 | Approach | 9 | 1 | 7.2 | 2–15 | 4 | 4 |
| Close approach | 1 | - | (3.79) | (0) | |||||
| Christmas | Pulu Keeling | |||||
|---|---|---|---|---|---|---|
| Species | Number of Interactions | Average Distance (m) | Percentage (%) | Number of Interactions | Average Distance (m) | Percentage (%) |
| Christmas Island Frigatebird Fregata andrewsi | 302 | 6.64 | 52.0 | N/A | N/A | N/A |
| Great Frigatebird Fregata minor | 196 | 5.56 | 33.8 | 1 | 8 | 1.3 |
| Lesser Frigatebird Fregata ariel | 2 | 9.00 | 0.3 | 10 | 6.2 | 13.2 |
| Frigatebird sp. | 29 | 5.55 | 5 | 6 | 7.5 | 7.9 |
| Red-footed Booby Sula sula | 31 | 6.77 | 5.3 | 17 | 4.82 | 22.4 |
| Masked Booby Sula dactylatra | N/A | N/A | N/A | 2 | 5.5 | 2.6 |
| Red-tailed Tropicbird Phaethon rubricauda | 1 | 15.00 | 0.2 | - | - | - |
| White-tailed Tropicbird Phaethon lepturus | 18 | 9.28 | 3.1 | 2 | 4 | 2.6 |
| Common Noddy Anous stolidus | 1 | 5.00 | 0.2 | 1 | 2 | 1.3 |
| White Tern Gygis alba | N/A | N/A | N/A | 37 | 6.24 | 48.7 |
| RPAS Flight State | Time Spent in State (%) | Total Interactions (%) | Interactions per Minute |
|---|---|---|---|
| Forward | 69.8 | 82.0 | 0.87 |
| Ascending | 9.9 | 5.3 | 0.40 |
| Descending | 11.9 | 5.3 | 0.33 |
| Change of direction | 6.3 | 5.6 | 0.67 |
| Hover | 2.1 | 1.7 | 0.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sorrell, K.J.; Dawlings, F.M.E.; Mackay, C.E.; Clarke, R.H. Routine and Safe Operation of Remotely Piloted Aircraft Systems in Areas with High Densities of Flying Birds. Drones 2023, 7, 510. https://doi.org/10.3390/drones7080510
Sorrell KJ, Dawlings FME, Mackay CE, Clarke RH. Routine and Safe Operation of Remotely Piloted Aircraft Systems in Areas with High Densities of Flying Birds. Drones. 2023; 7(8):510. https://doi.org/10.3390/drones7080510
Chicago/Turabian StyleSorrell, Karina J., Finella M. E. Dawlings, Claire E. Mackay, and Rohan H. Clarke. 2023. "Routine and Safe Operation of Remotely Piloted Aircraft Systems in Areas with High Densities of Flying Birds" Drones 7, no. 8: 510. https://doi.org/10.3390/drones7080510
APA StyleSorrell, K. J., Dawlings, F. M. E., Mackay, C. E., & Clarke, R. H. (2023). Routine and Safe Operation of Remotely Piloted Aircraft Systems in Areas with High Densities of Flying Birds. Drones, 7(8), 510. https://doi.org/10.3390/drones7080510