
Energy Consumption Performance of a VTOL UAV In and Out of Ground Effect by Flight Test


Abstract
1. Introduction
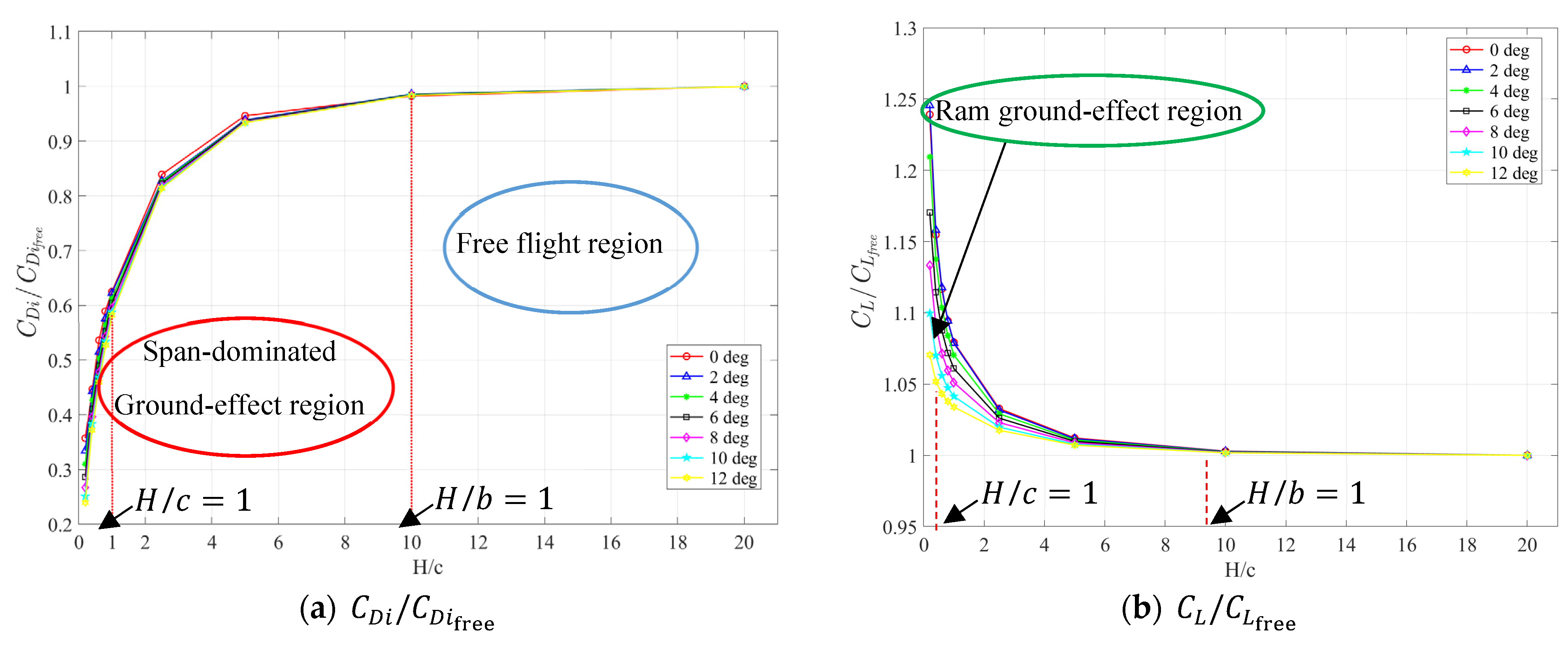
2. The VTOL UAV in Ground Effect
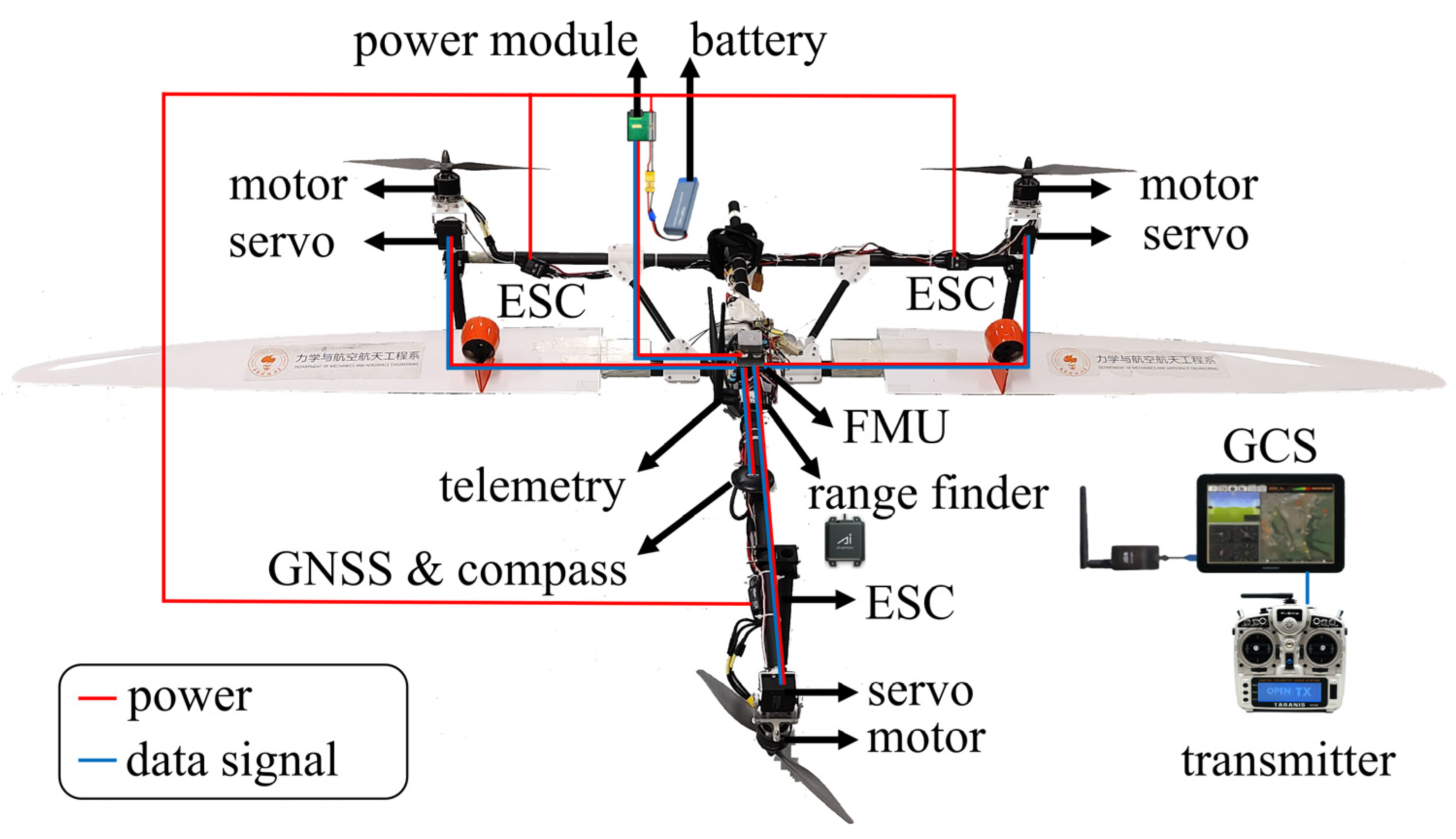
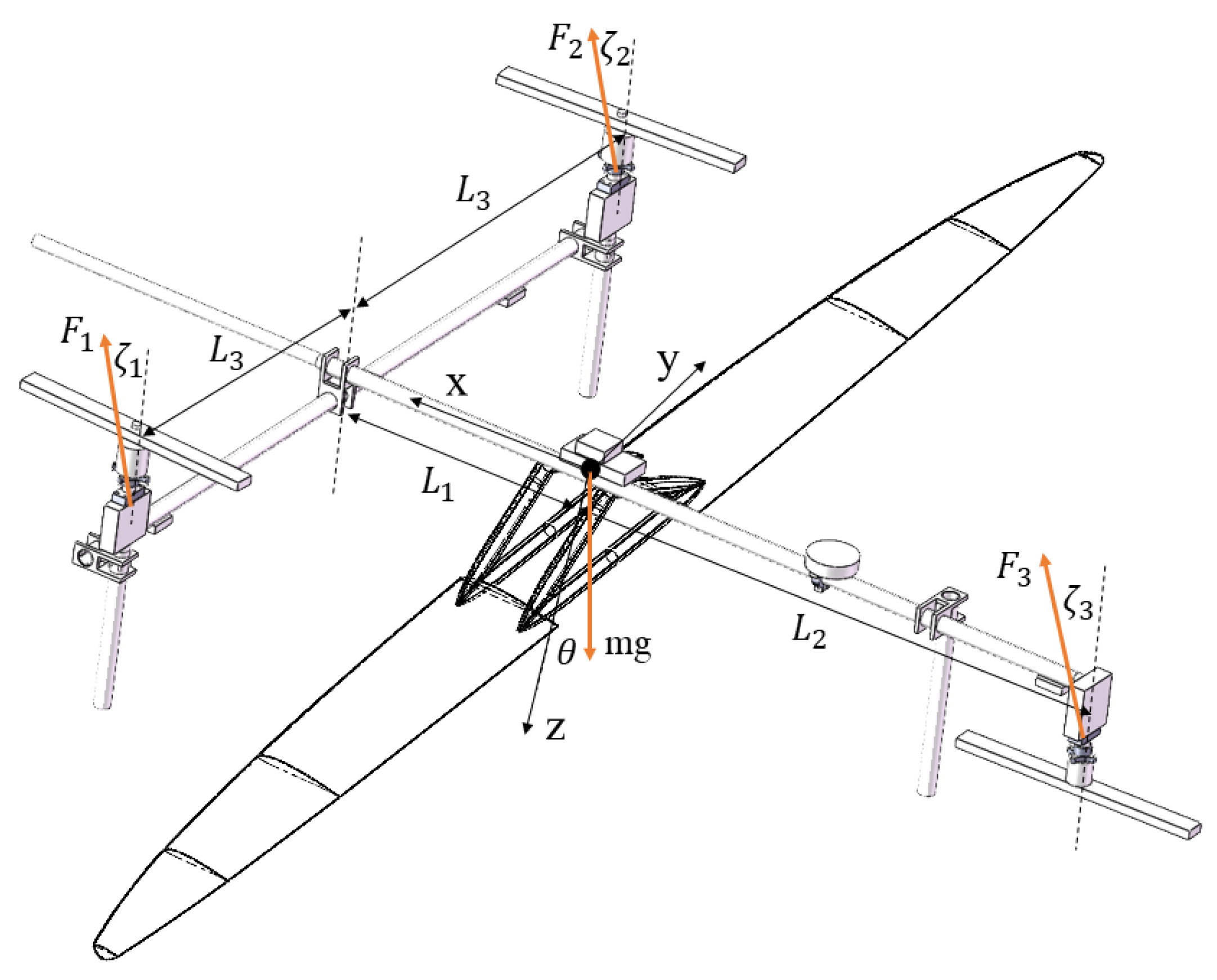
2.1. Testing Vehicle and Control Framework
2.1.1. Testing Vehicle
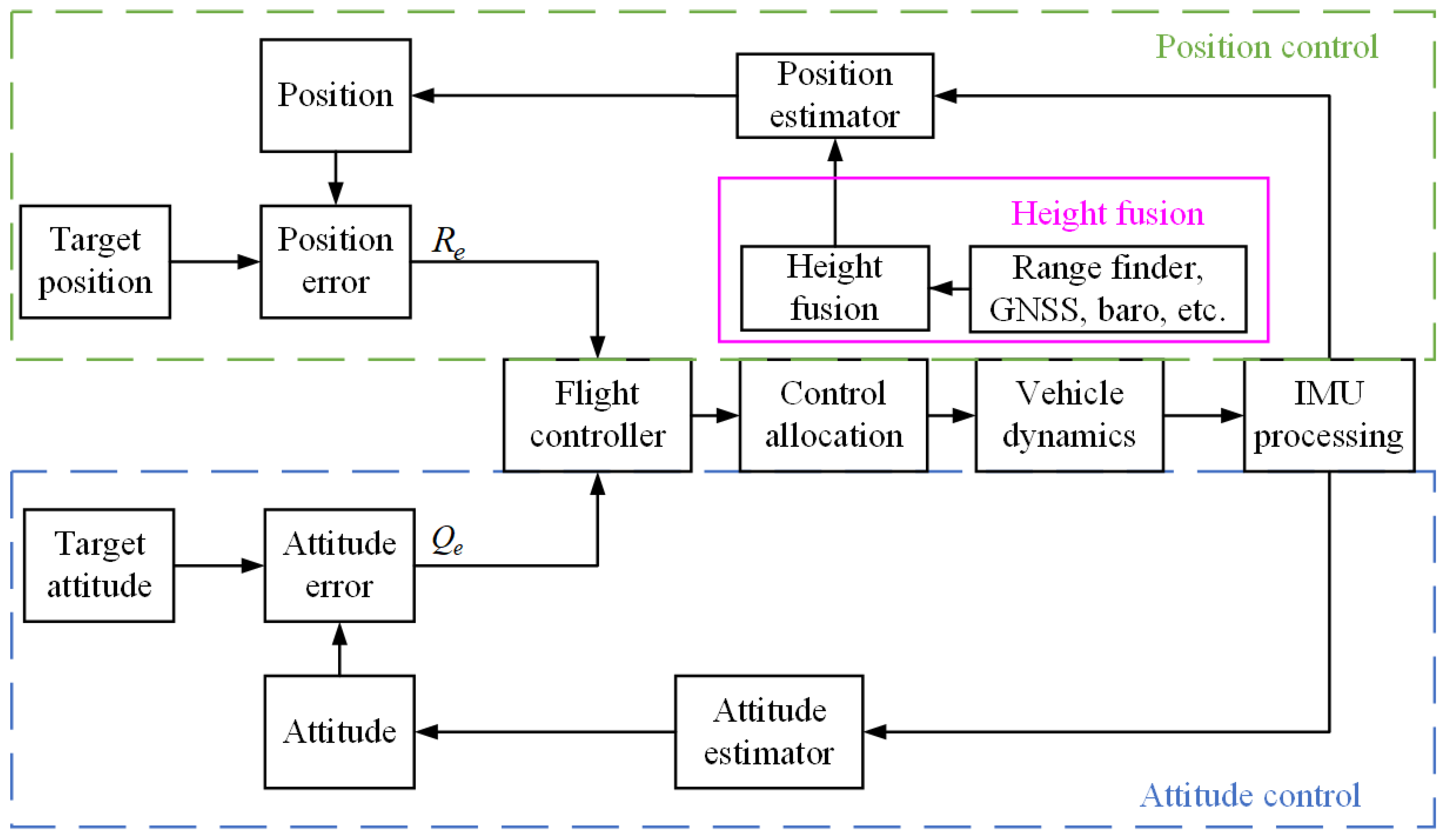
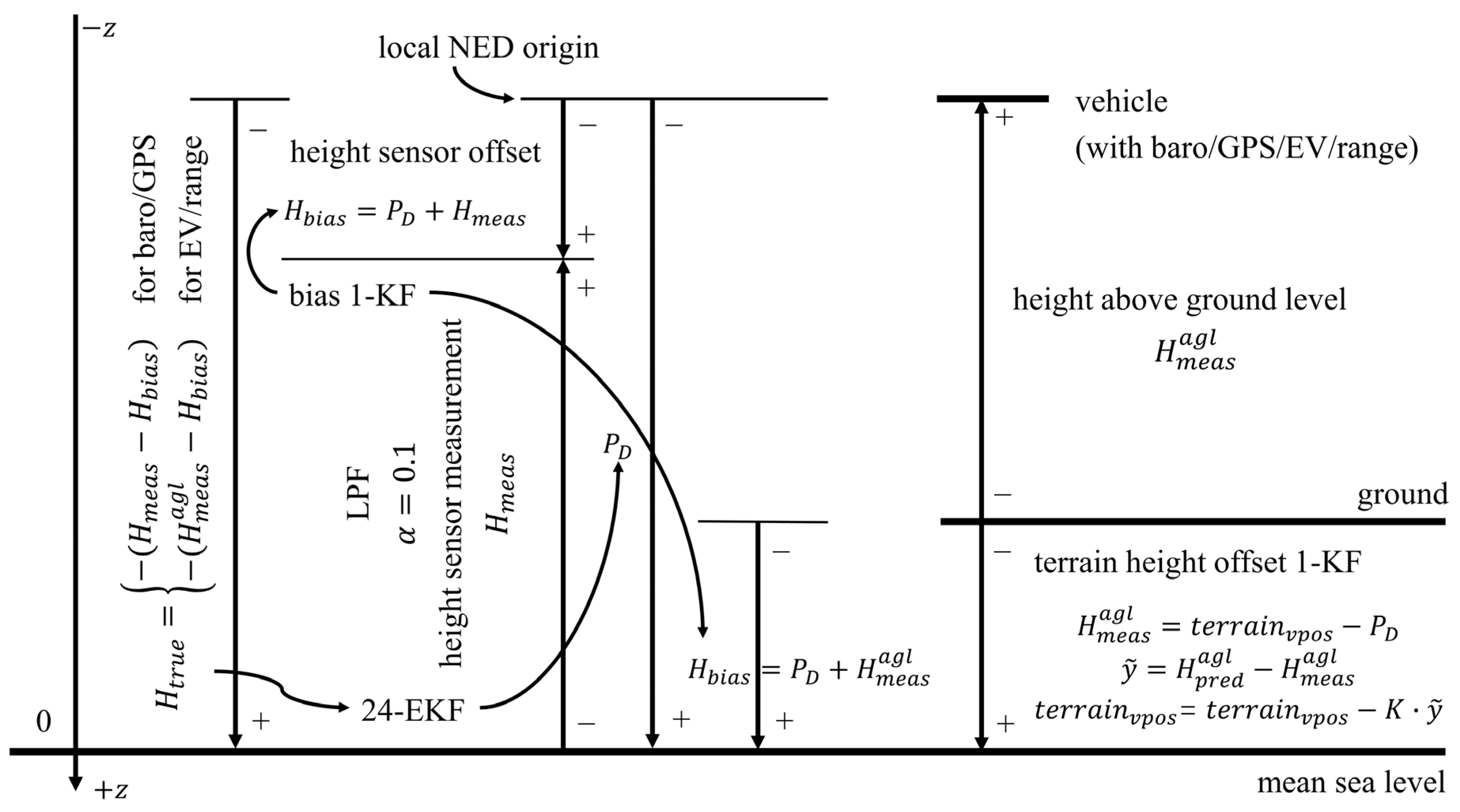
2.1.2. Control Framework
- Propulsive force
- Propulsive torque
2.2. Test Arrangement
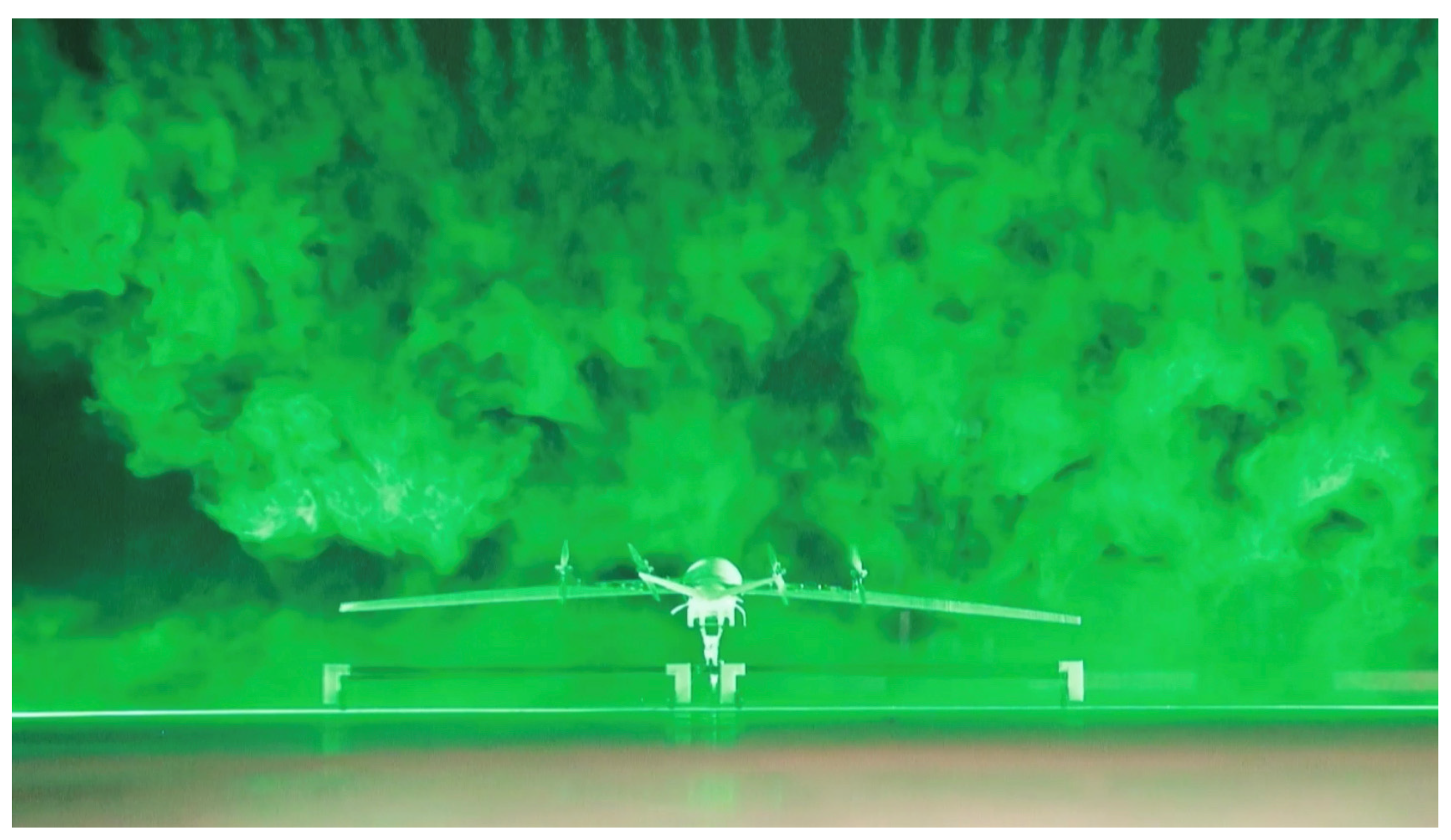
2.2.1. Flow Visualization
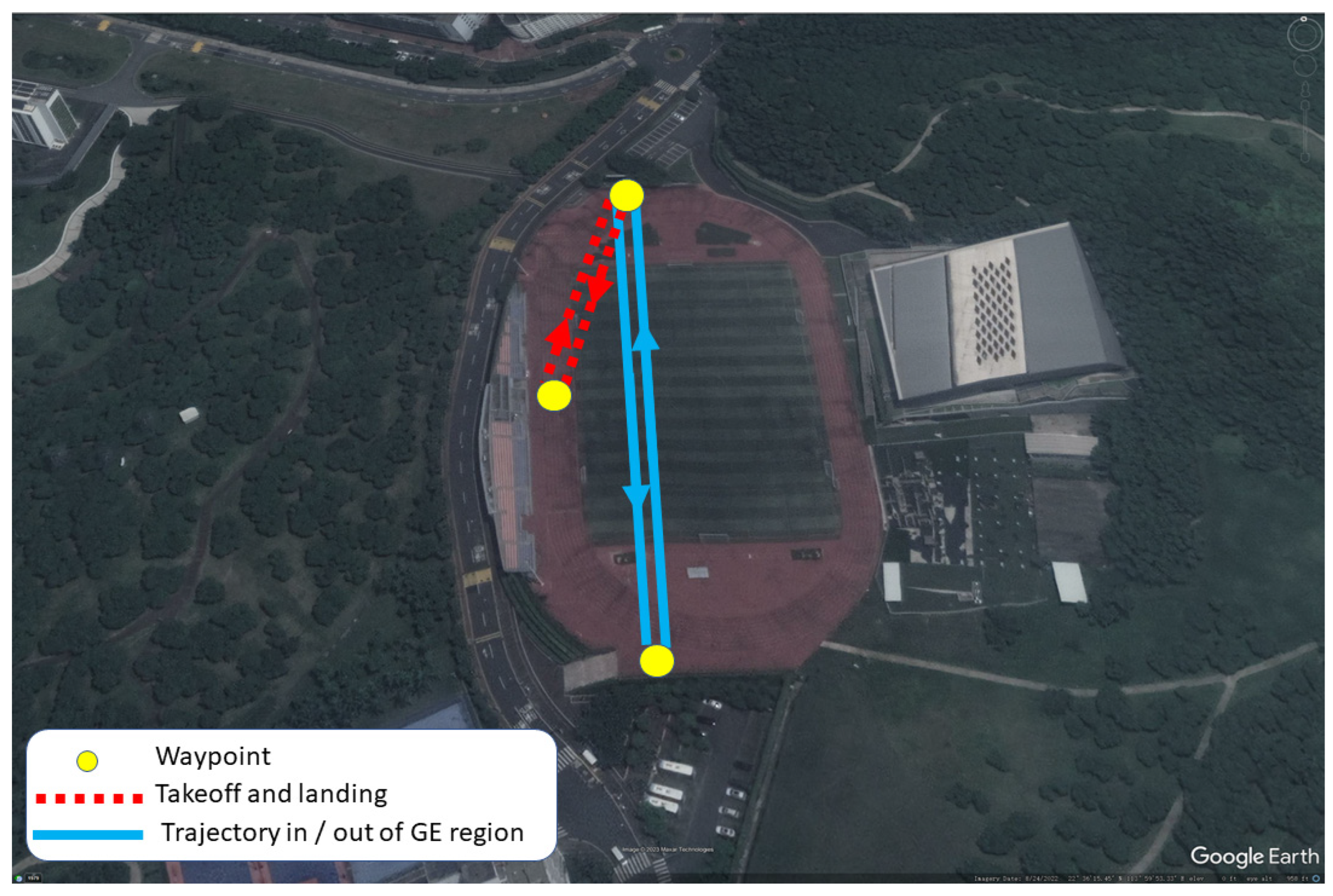
2.2.2. Flight Test Arrangement
3. Results and Discussion
3.1. Ground-Effect Visualization
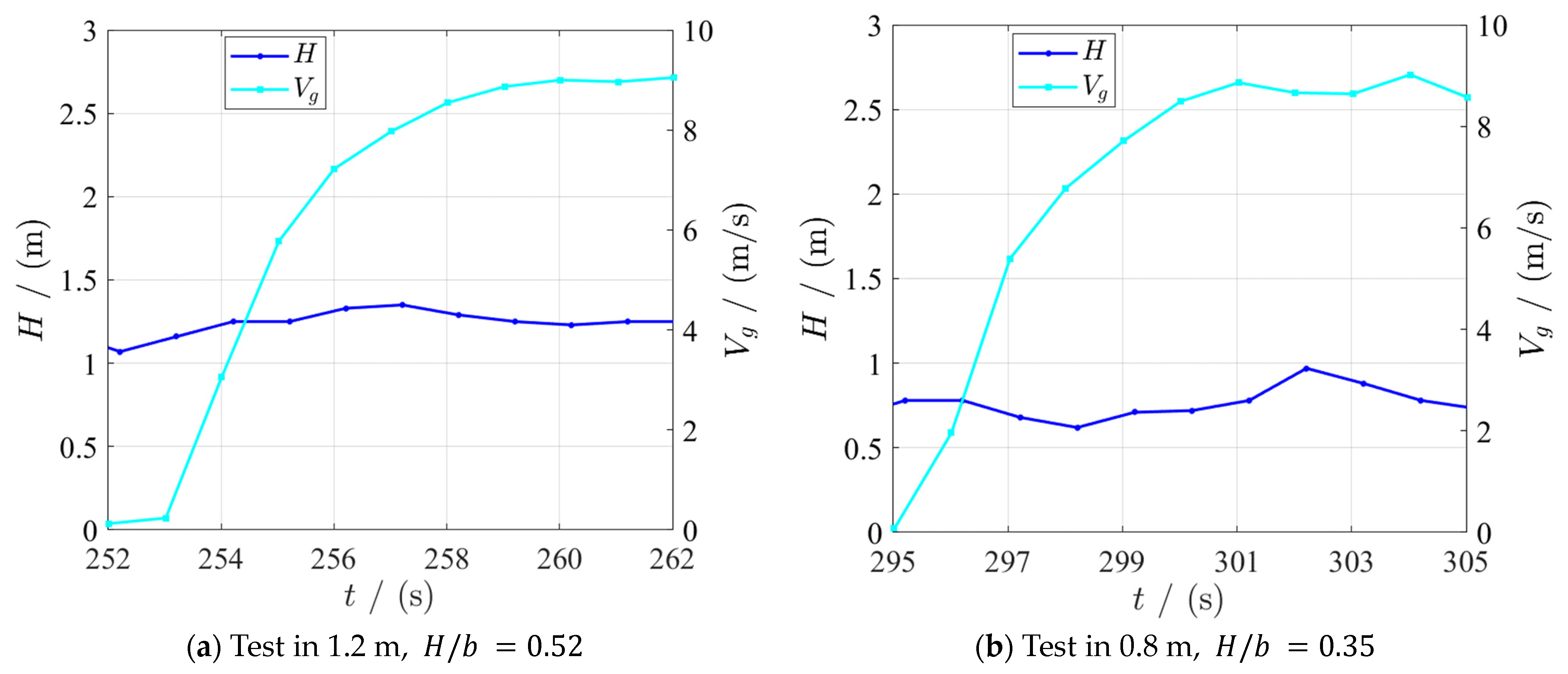
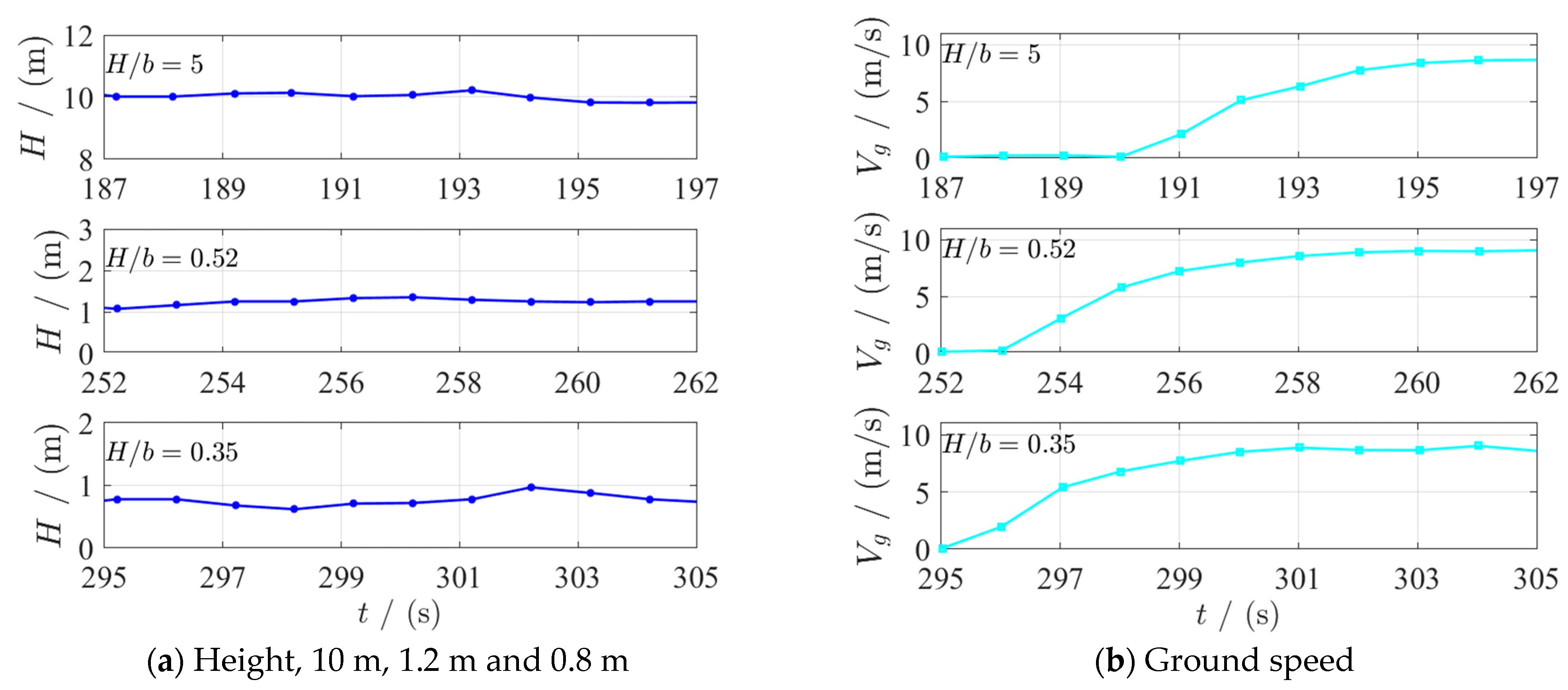
3.2. Flight Performance
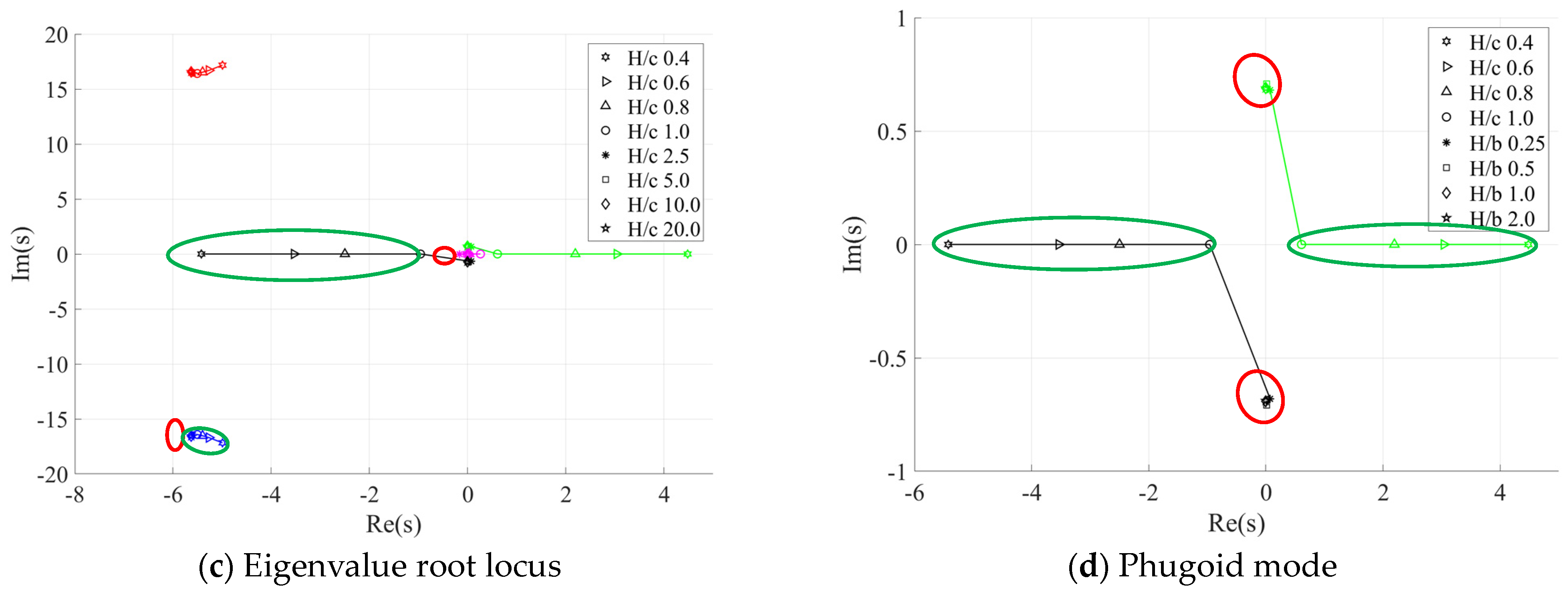
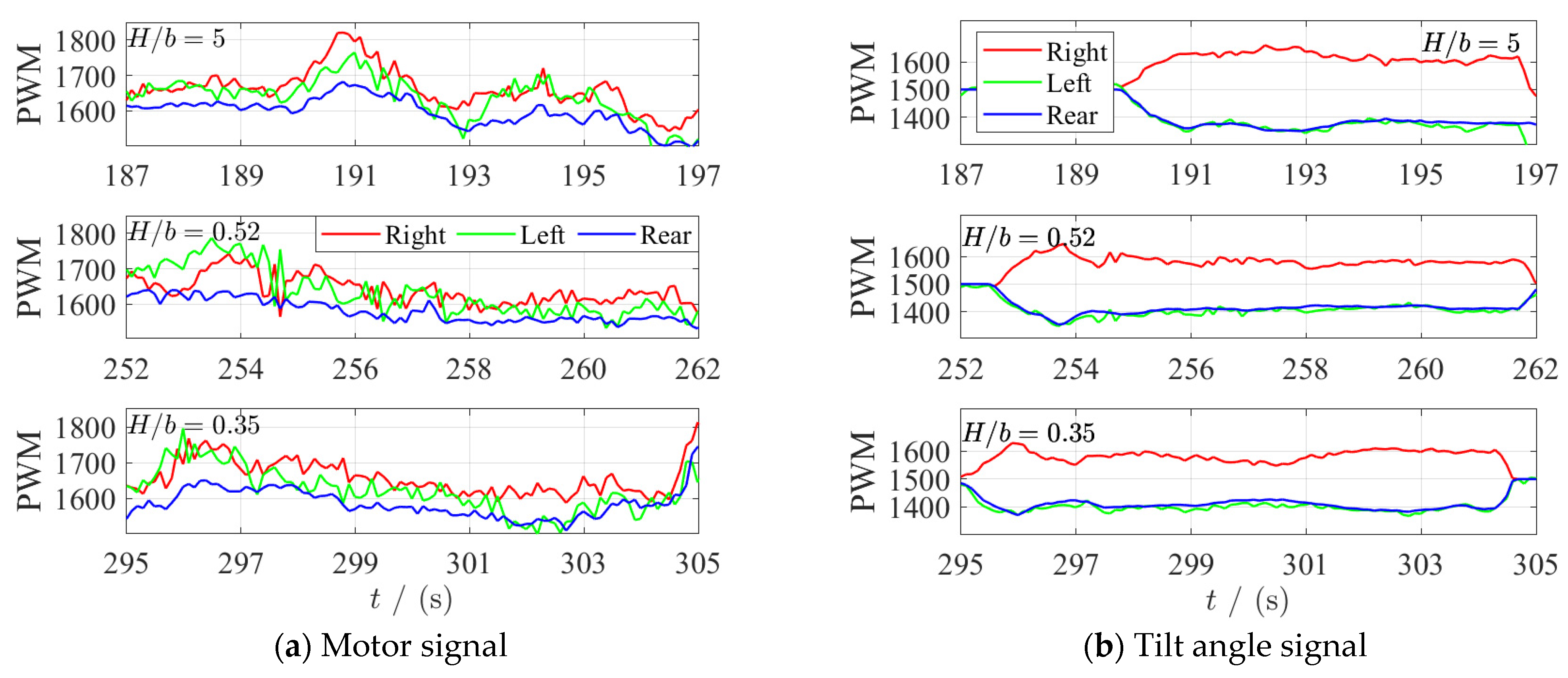
3.2.1. Flight Stability and Control
3.2.2. Energy Consumption Comparison
4. Conclusions
5. Patents
- A Wing-in-Ground (WIG) craft with precisely controllable flight altitude. Patent NO.: CN202220155446.1, China.
- A high wind resistance control system and method based on vector control. Patent NO.: CN202121723944.3, China.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| acceleration, m/s2 | |
| drag coefficient | |
| lift coefficient | |
| pitch moment coefficient | |
| wingspan, m | |
| mean chord length, m | |
| g | acceleration due to gravity, m/s2 |
| height, m | |
| dimensionless height of ground clearance, | |
| current, A; specially moment of inertia in | |
| Kalman gain | |
| roll, pitch, and yaw moment, N·m | |
| projected length in x axis or y axis, refers to center of gravity, m | |
| projected length in z axis, refers to center of gravity, m | |
| m | mass, kg |
| power consumption, W | |
| position of vehicle in down axis | |
| angular velocity about the x, y, and z axes, deg/s | |
| quaternion | |
| position | |
| reference area, m2 | |
| thrust, N | |
| torque, N·m | |
| voltage, V | |
| velocity components along the x, y, and z axis, m/s | |
| velocity, m/s | |
| weight, N | |
| innovation of height, m | |
| angle of attack, deg | |
| Euler angle, deg | |
| tilt angle of motor, deg | |
| density, kg/m3 | |
| moment of inertia, kg·m2 |
References
- Rozhdestvensky, K. Ekranoplans-The GEMs of fast water transport. Int. Marit. Technol. 1997, 109, 47–74. [Google Scholar]
- Rozhdestvensky, K.V. Wing-in-Ground Effect Vehicles. Prog. Aerosp. Sci. 2006, 42, 211–283. [Google Scholar] [CrossRef]
- Qu, Q.; Agarwal, R.K. Chord-dominated Ground-effect Aerodynamics of Fixed-wing UAVs. In Advanced UAV Aerodynamics, Flight Stability and Control; Wiley: Hoboken, NJ, USA, 2017; pp. 201–254. [Google Scholar]
- Shi, X.; Qu, Q.; Liu, P.; Hu, T.; Xun, Y.; Bu, C.; Chen, H. Feasibility analysis of fixed plates in chord-dominated dynamic ground effect wind tunnel experiment. Aerosp. Sci. Technol. 2023, 137, 108262. [Google Scholar] [CrossRef]
- Abramowski, T. Numerical investigation of airfoil in ground proximity. J. Theor. Appl. Mech. 2007, 45, 425–436. [Google Scholar]
- Yang, W.; Yang, Z. Numerical simulation on span-dominated ground effect of 3D wing in ground effect. Comput. Aided Eng. 2008, 17, 13–17. [Google Scholar]
- Tofa, M.M.; Maimun, A.; Ahmed, Y.M.; Jamei, S.; Priyanto, A.; Rahimuddin. Experimental investigation of a wing-in-ground effect craft. Sci. World J. 2014, 2014, 489308. [Google Scholar] [CrossRef]
- Zerihan, J.; Zhang, X. Aerodynamics of a Single Element Wing in Ground Effect. J. Aircr. 2000, 37, 1058–1064. [Google Scholar] [CrossRef]
- Tumse, S.; Karasu, I.; Sahin, B. Experimental Investigation of Ground Effect on the Vortical Flow Structure of a 40° Swept Delta Wing. J. Aerosp. Eng. 2022, 35, 04022055. [Google Scholar] [CrossRef]
- Shirsath, R.A.; Mukherjee, R. Experimental Investigations of the Aerodynamic Characteristics of a Finite Rectangular Wing in Ground Effect. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar]
- Lee, T.; Lin, G. Review of experimental investigations of wings in ground effect at low Reynolds numbers. Front. Aerosp. Eng. 2022, 1, 975158. [Google Scholar] [CrossRef]
- Irodov, R. Criteria of longitudinal stability of ekranoplan. Uchenive Zaposki TSAGI 1970, 1, 63–74. [Google Scholar]
- Staufenbiel, R. Some Nonlinear Effects in Stability and Control of Wing-in-Ground Effect Vehicles. J. Aircr. 1978, 15, 541–544. [Google Scholar] [CrossRef]
- Staufenbiel, R.W.; Schlichting, U.-J. Stability of airplanes in ground effect. J. Aircr. 1988, 25, 289–294. [Google Scholar] [CrossRef]
- Yang, W.; Yang, Z.; Ying, C. Effects of design parameters on longitudinal static stability for WIG craft. Int. J. Aerodyn. 2010, 1, 97–113. [Google Scholar] [CrossRef]
- Lee, J.; Han, C.-s.; Bae, C.-H. Influence of wing configurations on aerodynamic characteristics of wings in ground effect. J. Aircr. 2010, 47, 1030–1040. [Google Scholar] [CrossRef]
- Yang, W.; Yang, Z. Schemed power-augmented flow for wing-in-ground effect craft in cruise. Chin. J. Aeronaut. 2011, 24, 119–126. [Google Scholar] [CrossRef]
- Chun, H.H.; Chang, C.H. Longitudinal stability and dynamic motions of a small passenger WIG craft. Ocean Eng. 2002, 29, 1145–1162. [Google Scholar] [CrossRef]
- Su, S.; Shan, X.; Yu, P.; Wang, H. The inherent stability characteristics of a Wing-in-Ground (WIG) craft in various ground effect regions. In Proceedings of the AIAA AVIATION 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 3598. [Google Scholar]
- Wigetworks. AIRFISH 8. Available online: https://wigetworks.com/ (accessed on 1 December 2019).
- Regent. Viceroy. Available online: https://www.regentcraft.com/seagliders/viceroy (accessed on 1 December 2019).
- Yildiz, Y.; Unel, M.; Demirel, A.E. Nonlinear hierarchical control of a quad tilt-wing UAV: An adaptive control approach. Int. J. Adapt. Control Signal Process. 2017, 31, 1245–1264. [Google Scholar] [CrossRef]
- Apkarian, J. Pitch-decoupled VTOL/FW aircraft: First flights. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linköping, Sweden, 3–5 October 2017; pp. 258–263. [Google Scholar]
- Chen, C.; Zhang, J.; Zhang, D.; Shen, L. Control and flight test of a tilt-rotor unmanned aerial vehicle. Int. J. Adv. Robot. Syst. 2017, 14, 1729881416678141. [Google Scholar] [CrossRef]
- Hartmann, P.; Meyer, C.; Moormann, D. Unified Velocity Control and Flight State Transition of Unmanned Tilt-Wing Aircraft. J. Guid. Control Dyn. 2017, 40, 1348–1359. [Google Scholar] [CrossRef]
- Yayla, M.; Kutay, A.T.; Senipek, M.; Gungor, O. An Adaptive Flight Controller Design for a Tilt-Prop Fixed Wing UAV for All Flight Modes. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Bautista, J.A.; Osorio, A.; Lozano, R. Modeling and analysis of a tricopter/flying-wing convertible UAV with tilt-rotors. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 672–681. [Google Scholar]
- PX4. PX4-ECL. Available online: https://github.com/PX4/PX4-ECL (accessed on 6 December 2020).
- He, X.; Leang, K.K. Quasi-Steady In-Ground-Effect Model for Single and Multirotor Aerial Vehicles. AIAA J. 2020, 58, 5318–5331. [Google Scholar] [CrossRef]
- Lin, H.-H.; Wu, S.-J.; Liu, T.-L.; Pan, K.-C. Construction of the Operating Limits Diagram for a Ship-Based Helicopter Using the Design of Experiments with Computational Intelligence Techniques. Int. J. Aeronaut. Space Sci. 2021, 22, 1–16. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Magnitude |
|---|---|
| b | 2.3 m |
| AR | 12 |
| 0.2 m | |
| Length | 1.17 m |
| Payload weight | 0.5 kg |
| MTOW | 4.5 kg |
| SN | Description | Model | Accuracy |
|---|---|---|---|
| 1 | Barometer | MS5611 | ±1.5 mbar |
| 2 | GNSS | NEO V3 | ±0.5–2 m |
| 3 | Accelerometer and Gyroscope | ICM-20689 | ±2%, ±2% |
| ICM-20602 | ±1%, ±1% | ||
| BMI055 | ±2%, ±2% | ||
| 4 | Magnetometer | IST8310 | ±0.3 uT |
| 5 | Range finder | US-D1 | 0.04 m |
| (m) | (m/s) | (A) | % | (W) | % | |
|---|---|---|---|---|---|---|
| 10 | 5 | 9.05 | 62.05 | 100% | 1386.66 | 100% |
| 1.2 | 0.52 | 9.05 | 50.25 | 80.98% | 1073.06 | 77.38% |
| 0.8 | 0.35 | 9.02 | 44.75 | 72.12% | 953.34 | 68.75% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, S.; Shan, X.; Yu, P.; Wang, H. Energy Consumption Performance of a VTOL UAV In and Out of Ground Effect by Flight Test. Drones 2024, 8, 625. https://doi.org/10.3390/drones8110625
Su S, Shan X, Yu P, Wang H. Energy Consumption Performance of a VTOL UAV In and Out of Ground Effect by Flight Test. Drones. 2024; 8(11):625. https://doi.org/10.3390/drones8110625
Chicago/Turabian StyleSu, Shanfei, Xiaowen Shan, Peng Yu, and Hao Wang. 2024. "Energy Consumption Performance of a VTOL UAV In and Out of Ground Effect by Flight Test" Drones 8, no. 11: 625. https://doi.org/10.3390/drones8110625
APA StyleSu, S., Shan, X., Yu, P., & Wang, H. (2024). Energy Consumption Performance of a VTOL UAV In and Out of Ground Effect by Flight Test. Drones, 8(11), 625. https://doi.org/10.3390/drones8110625