
Navigation and Deployment of Solar-Powered Unmanned Aerial Vehicles for Civilian Applications: A Comprehensive Review



Abstract
1. Introduction
2. Review Methodology
- Relevance to the research topic: only the literature related to SUAVs or that had inspiration related to SUAVs was included.
- Language of publication: only works published in English were considered.
- Peer-reviewed publications: peer-reviewed articles and conference papers were included to ensure the credibility and academic rigor of the sources.
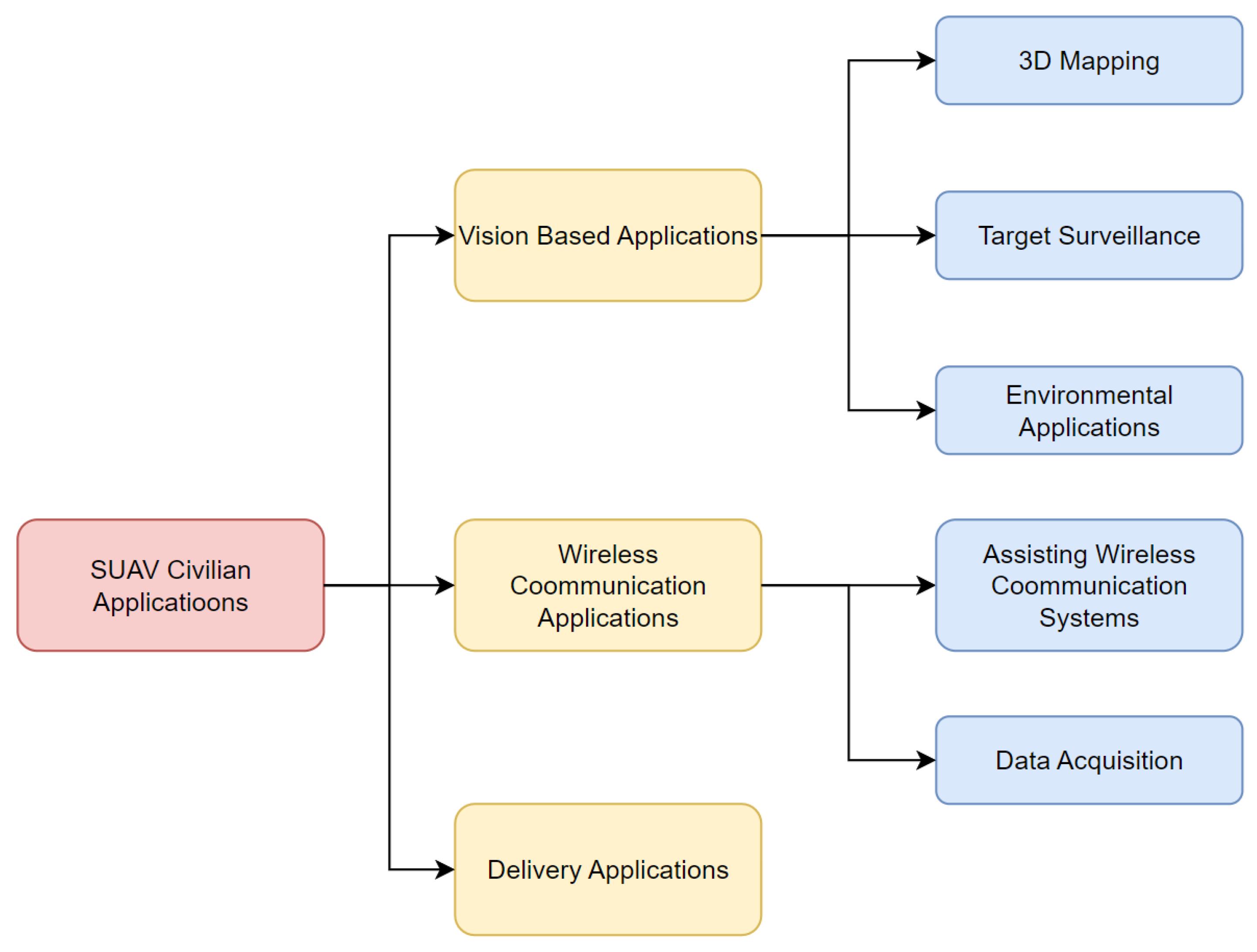
3. Civilian Applications
3.1. Vision-Based Applications
3.1.1. Target Surveillance
3.1.2. Environmental Applications
3.1.3. Three-Dimensional Mapping
3.2. Wireless Communication Applications
3.2.1. Assisting Wireless Communication Systems
3.2.2. Data Acquisition
3.3. Delivery Applications
4. Energy Models of SUAVs
4.1. Line of Sight
4.2. Solar Energy Harvesting Models
4.2.1. Cloud-Integrated Energy Model
4.2.2. Energy Model without Taking Clouds into Account
5. SUAV Path-Planning Methods
5.1. Sample-Based Methods
5.2. Optimization-Based Methods
5.3. Coverage Navigation
6. Deployment of SUAVs
6.1. Coverage Deployment for SUAVs
6.2. Vehicle Route Problem (VRP) for Solar UAV Deployment
7. Current Challenges and Future Research Directions
7.1. Current Challenges
7.2. Future Research Directions
7.2.1. Combining Reconfigurable Intelligent Surface Technologies
7.2.2. SUAVs on Uneven Terrain
7.2.3. Multidimensional Robot Collaboration
7.2.4. Natural Disaster Monitoring
7.2.5. Wildlife Monitoring
7.2.6. Smart Agriculture
7.2.7. Machine Learning Techniques
7.2.8. Energy Management Methods and Hybrid SUAVs
7.2.9. Multi-SUAVs’ Self-Collision Avoidance
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Muchiri, G.; Kimathi, S. A review of applications and potential applications of UAV. In Proceedings of the Sustainable Research and Innovation Conference, 5–7 October 2022; pp. 280–283. [Google Scholar]
- Ma’Sum, M.A.; Arrofi, M.K.; Jati, G.; Arifin, F.; Kurniawan, M.N.; Mursanto, P.; Jatmiko, W. Simulation of intelligent unmanned aerial vehicle (UAV) for military surveillance. In Proceedings of the 2013 International Conference on Advanced Computer Science and Information Systems (ICACSIS), Sanur Bali, Indonesia, 28–29 September 2013; pp. 161–166. [Google Scholar]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, F.; Zhang, B.; Ma, R.; Hao, Q. Development of UAV-based target tracking and recognition systems. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3409–3422. [Google Scholar] [CrossRef]
- Jordan, S.; Moore, J.; Hovet, S.; Box, J.; Perry, J.; Kirsche, K.; Lewis, D.; Tse, Z.T.H. State-of-the-art technologies for UAV inspections. IET Radar Sonar Navig. 2018, 12, 151–164. [Google Scholar] [CrossRef]
- Boursianis, A.D.; Papadopoulou, M.S.; Diamantoulakis, P.; Liopa-Tsakalidi, A.; Barouchas, P.; Salahas, G.; Karagiannidis, G.; Wan, S.; Goudos, S.K. Internet of things (IoT) and agricultural unmanned aerial vehicles (UAVs) in smart farming: A comprehensive review. Internet Things 2022, 18, 100187. [Google Scholar] [CrossRef]
- Tisdale, J.; Kim, Z.; Hedrick, J.K. Autonomous UAV path planning and estimation. IEEE Robot. Autom. Mag. 2009, 16, 35–42. [Google Scholar] [CrossRef]
- Safyanu, B.D.; Abdullah, M.N.; Omar, Z. Review of power device for solar-powered aircraft applications. J. Aerosp. Technol. Manag. 2019, 11, e4119. [Google Scholar] [CrossRef]
- Global Solar-Powered UAV Market 2020–2024; TechNavio: Elmhurst, IL, USA, 2020.
- Engblom, W. Novel Approach to High-Altitude, Long-Endurance Stationkeeping. In Proceedings of the 30th AIAA Applied Aerodynamics Conference, New Orleans, LA, USA, 25–28 June 2012; p. 3203. [Google Scholar]
- Harris, M. Project Skybender: Google’s secretive 5G internet drone tests revealed. Guardian 2016, 29. [Google Scholar]
- Hassan, A.A.; El Habrouk, M.; Deghedie, S. Renewable Energy for Robots and Robots for Renewable Energy—A Review. Robotica 2020, 38, 1576–1604. [Google Scholar] [CrossRef]
- Jashnani, S.; Nada, T.; Ishfaq, M.; Khamker, A.; Shaholia, P. Sizing and preliminary hardware testing of solar powered UAV. Egypt. J. Remote Sens. Space Sci. 2013, 16, 189–198. [Google Scholar] [CrossRef]
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Stastny, T.; Wawrzacz, B.; Hinzmann, T.; Leutenegger, S.; Alexis, K.; Siegwart, R. Design of small hand-launched solar-powered UAVs: From concept study to a multi-day world endurance record flight. J. Field Robot. 2017, 34, 1352–1377. [Google Scholar] [CrossRef]
- Rajendran, P.; Smith, H. Implications of longitude and latitude on the size of solar-powered UAV. Energy Convers. Manag. 2015, 98, 107–114. [Google Scholar] [CrossRef]
- Gupta, P.; Poojary, A.J.; Pant, R.S. Conceptual Design and Sizing of a Solar Powered Tilt-Rotor Hybrid UAV for exploration over Mars. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023; p. 4070. [Google Scholar]
- Singhal, G.; Bansod, B.; Mathew, L. Unmanned aerial vehicle classification, applications and challenges: A review. Preprints 2018, 2018110601. [Google Scholar] [CrossRef]
- El-Atab, N.; Mishra, R.B.; Alshanbari, R.; Hussain, M.M. Solar powered small unmanned aerial vehicles: A review. Energy Technol. 2021, 9, 2100587. [Google Scholar] [CrossRef]
- Pal, S.; Mishra, A.; Singh, P. Recent Trends in Long Endurance Solar Powered UAVs: A Review. Int. J. Adv. Sci. Technol. 2021, 19, 6009–6018. [Google Scholar]
- Zhu, X.; Guo, Z.; Hou, Z. Solar-powered airplanes: A historical perspective and future challenges. Prog. Aerosp. Sci. 2014, 71, 36–53. [Google Scholar] [CrossRef]
- Lu, Y.; Xue, Z.; Xia, G.S.; Zhang, L. A survey on vision-based UAV navigation. Geo-Spat. Inf. Sci. 2018, 21, 21–32. [Google Scholar] [CrossRef]
- Abbe, G.; Smith, H. Technological development trends in Solar-powered Aircraft Systems. Renew. Sustain. Energy Rev. 2016, 60, 770–783. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, J.; Wang, H.; Su, G. A method of 3D path planning for solar-powered UAV with fixed target and solar tracking. Aerosp. Sci. Technol. 2019, 92, 831–838. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, J.; Su, G.; Wang, H.; Liu, R.; Du, P. Energy-optimal path planning for solar-powered UAVs monitoring stationary target. In Proceedings of the 4th ACM SIGSPATIAL International Workshop on Safety and Resilience, Seattle, WA, USA, 6 November 2018; pp. 1–8. [Google Scholar]
- Wu, J.; Wang, H.; Huang, Y.; Su, Z.; Zhang, M. Energy management strategy for solar-powered UAV long-endurance target tracking. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 1878–1891. [Google Scholar] [CrossRef]
- Wu, J.; Wang, H.; Li, N.; Yao, P.; Huang, Y.; Su, Z.; Yu, Y. Distributed trajectory optimization for multiple solar-powered UAVs target tracking in urban environment by Adaptive Grasshopper Optimization Algorithm. Aerosp. Sci. Technol. 2017, 70, 497–510. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Yao, P. Energy-optimal path planning for solar-powered UAV with tracking moving ground target. Aerosp. Sci. Technol. 2016, 53, 241–251. [Google Scholar] [CrossRef]
- Hu, S.; Ni, W.; Wang, X.; Jamalipour, A. Disguised tailing and video surveillance with solar-powered fixed-wing unmanned aerial vehicle. IEEE Trans. Veh. Technol. 2022, 71, 5507–5518. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Energy-efficient decentralized navigation of a team of solar-powered UAVs for collaborative eavesdropping on a mobile ground target in urban environments. Ad. Hoc. Netw. 2021, 117, 102485. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Energy-Efficient Autonomous Navigation of Solar-Powered UAVs for Surveillance of Mobile Ground Targets in Urban Environments. Energies 2020, 13, 5563. [Google Scholar] [CrossRef]
- Hosseinisianaki, S.; Mesbahi, M. Energy aware aerial surveillance for a long endurance solar-powered UAV. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 4552. [Google Scholar]
- Herwitz, S.; Johnson, L.; Arvesen, J.; Higgins, R.; Leung, J.; Dunagan, S. Precision agriculture as a commercial application for solar-powered unmanned aerial vehicles. In Proceedings of the 1st UAV Conference, Singapore, 26 June 2002; p. 3404. [Google Scholar]
- Herwitz, S.R.; Dunagan, S.; Sullivan, D.; Higgins, R.; Johnson, L.; Zheng, J.; Slye, R.; Brass, J.; Leung, J.; Gallmeyer, B.; et al. Solar-powered UAV mission for agricultural decision support. In Proceedings of the IGARSS 2003. 2003 IEEE International Geoscience and Remote Sensing Symposium, Proceedings (IEEE Cat. No. 03CH37477). Toulouse, France, 21–25 July 2003; Volume 3, pp. 1692–1694. [Google Scholar]
- Malaver Rojas, J.; Gonzalez, F.; Motta, N.; Villa, T.F.; Etse, V.; Puig Garcia, E. Design and flight testing of an integrated solar powered UAV and WSN for greenhouse gas monitoring emissions in agricultural farms. In Proceedings of the IROS Workshop on Agri-Food Robotics, Hamburg, Germany, 2 October 2015; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2015; pp. 1–6. [Google Scholar]
- Malaver, A.; Motta, N.; Corke, P.; Gonzalez, F. Development and integration of a solar powered unmanned aerial vehicle and a wireless sensor network to monitor greenhouse gases. Sensors 2015, 15, 4072–4096. [Google Scholar] [CrossRef]
- Thipyopas, C.; Sripawadkul, V.; Warin, N. Design and development of a small solar-powered UAV for environmental monitoring application. In Proceedings of the 2019 IEEE Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 3–6 October 2019; pp. 316–319. [Google Scholar]
- Rojas, A.J.; Gonzalez, L.F.; Motta, N.; Villa, T.F. Design and flight testing of an integrated solar powered UAV and WSN for remote gas sensing. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–10. [Google Scholar]
- Runge, H.; Rack, W.; Ruiz-Leon, A.; Hepperle, M. A solar powered hale-uav for arctic research. In Proceedings of the 1st CEAS European Air and Space Conference, Bonn, Germany, 15 September 2007. [Google Scholar]
- Oettershagen, P.; Stastny, T.; Mantel, T.; Melzer, A.; Rudin, K.; Gohl, P.; Agamennoni, G.; Alexis, K.; Siegwart, R. Long-endurance sensing and mapping using a hand-launchable solar-powered UAV. In Field and Service Robotics: Results of the 10th International Conference; Springer: Berlin/Heidelberg, Germany, 2016; pp. 441–454. [Google Scholar]
- Dwivedi, V.S.; Patrikar, J.; Addamane, A.; Ghosh, A. MARAAL: A low altitude long endurance solar powered UAV for surveillance and mapping applications. In Proceedings of the 2018 23rd International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, Poland, 27–30 August 2018; pp. 449–454. [Google Scholar]
- Karthik, M.; Usha, S.; Predeep, B.; Saran, G.; Sridhar, G.; Theeksith, R. Design and development of solar powered unmanned aerial vehicle (UAV) for surveying, mapping and disaster relief. AIP Conf. Proc. 2021, 2387, 140025. [Google Scholar]
- Ramos, A.; Santiago, M.; Shiguemori, E.; Serokhvostov, S.; Gupta, P.; Zhong, L. Solar-powered UAV platform system: A case study for ground change detection. In Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences, ICAS 2018, Belo Horizonte, Brazil, 9–14 September 2018. [Google Scholar]
- Chettri, L.; Bera, R. A comprehensive survey on Internet of Things (IoT) toward 5G wireless systems. IEEE Internet Things J. 2019, 7, 16–32. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Agrawal, D.P.; Zhang, S. Communication and networking of UAV-based systems: Classification and associated architectures. J. Netw. Comput. Appl. 2017, 84, 93–108. [Google Scholar] [CrossRef]
- Padilla, G.E.G.; Kim, K.J.; Park, S.H.; Yu, K.H. Flight path planning of solar-powered UAV for sustainable communication relay. IEEE Robot. Autom. Lett. 2020, 5, 6772–6779. [Google Scholar] [CrossRef]
- Song, X.; Chang, Z.; Guo, X.; Wu, P.; Hämäläinen, T. Energy efficient optimization for solar-powered UAV communications system. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Huang, H.; Savkin, A.V. Autonomous navigation of a solar-powered UAV for secure communication in urban environments with eavesdropping avoidance. Future Internet 2020, 12, 170. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Ni, W. Energy-efficient 3D navigation of a solar-powered UAV for secure communication in the presence of eavesdroppers and no-fly zones. Energies 2020, 13, 1445. [Google Scholar] [CrossRef]
- Sun, Y.; Ng, D.W.K.; Xu, D.; Dai, L.; Schober, R. Resource allocation for solar powered UAV communication systems. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar]
- Sun, Y.; Xu, D.; Ng, D.W.K.; Dai, L.; Schober, R. Optimal 3D-trajectory design and resource allocation for solar-powered UAV communication systems. IEEE Trans. Commun. 2019, 67, 4281–4298. [Google Scholar] [CrossRef]
- Romeo, G.; Frulla, G. HELIPLAT®: High altitude very-long endurance solar powered UAV for telecommunication and Earth observation applications. Aeronaut. J. 2004, 108, 277–293. [Google Scholar] [CrossRef]
- Romeo, G.; Frulla, G.; Cestino, E.; Corsino, G. HELIPLAT: Design, aerodynamic, structural analysis of long-endurance solar-powered stratospheric platform. J. Aircr. 2004, 41, 1505–1520. [Google Scholar] [CrossRef]
- Woźniak, W.; Jessa, M. Selection of solar powered unmanned aerial vehicles for a long range data acquisition chain. Sensors 2021, 21, 2772. [Google Scholar] [CrossRef]
- Luo, C.; Hu, J.; Hou, Y.; Hong, Y.; Zhu, Y.; Li, D. Maximizing the amount of data collected from WSN based on solar-powered UAV in urban environment. J. Comb. Optim. 2023, 45, 132. [Google Scholar] [CrossRef]
- Uddin, N.; Pant, R.S. Conceptual Design and Sizing of LiDAR-Equipped Solar-Powered HALE UAV for Coastal Surveillance in India. In International Symposium on Aviation Technology, MRO, and Operations; Springer: Berlin/Heidelberg, Germany, 2021; pp. 159–169. [Google Scholar]
- Lun, Y.; Yao, P.; Wang, Y. Trajectory optimization of SUAV for marine vessels communication relay mission. IEEE Syst. J. 2020, 14, 5014–5024. [Google Scholar] [CrossRef]
- Seng, S.; Yang, G.; Li, X.; Ji, H.; Luo, C. Energy-efficient communications in solar-powered unmanned aerial systems. In Proceedings of the GLOBECOM 2020-2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Yang, G.; Luo, C. Performance Improvement in UAV Communication Systems with Uncertain Solar Energy Supply. IEEE Internet Things J. 2023, 10, 19607–19616. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man, Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
- Scott, J.E.; Scott, C.H. Drone Delivery Models for Healthcare. In Proceedings of the Hawaii International Conference on System Sciences, Waikoloa, HI, USA, 4–7 January 2017. [Google Scholar]
- Tian, Z.; Haas, Z.J.; Shinde, S. Routing in Solar-Powered UAV Delivery System. Drones 2022, 6, 282. [Google Scholar] [CrossRef]
- Rajendran, P.; Smith, H. Review of solar and battery power system development for solar-powered electric unmanned aerial vehicles. Adv. Mater. Res. 2015, 1125, 641–647. [Google Scholar] [CrossRef]
- Morton, S.; D’Sa, R.; Papanikolopoulos, N. Solar powered UAV: Design and experiments. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2460–2466. [Google Scholar]
- Khan, N.R.; Raghorte, A.V.; Nandankar, P.V.; Waware, J.A. Solar powered UAV: A comprehensive review. AIP Conf. Proc. 2023, 2753, 020016. [Google Scholar]
- Rysdyk, R. UAV path following for constant line-of-sight. In Proceedings of the 2nd AIAA “Unmanned Unlimited” Conf. and Workshop & Exhibit, San Diego, CA, USA, 15–18 September 2003; p. 6626. [Google Scholar]
- Kim, J.; Kim, Y. Moving ground target tracking in dense obstacle areas using UAVs. IFAC Proc. Vol. 2008, 41, 8552–8557. [Google Scholar] [CrossRef]
- Mohammed, I.; Collings, I.B.; Hanly, S.V. Line of sight probability prediction for UAV communication. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Zhang, J.; Lou, M.; Xiang, L.; Hu, L. Power cognition: Enabling intelligent energy harvesting and resource allocation for solar-powered UAVs. Future Gener. Comput. Syst. 2020, 110, 658–664. [Google Scholar] [CrossRef]
- Kokhanovsky, A. Optical properties of terrestrial clouds. Earth-Sci. Rev. 2004, 64, 189–241. [Google Scholar] [CrossRef]
- Sayigh, A. Solar Energy Engineering; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Baldock, N.; Mokhtarzadeh-Dehghan, M. A study of solar-powered, high-altitude unmanned aerial vehicles. Aircr. Eng. Aerosp. Technol. 2006, 78, 187–193. [Google Scholar] [CrossRef]
- Wei, X.; Yao, P.; Xie, Z. Comprehensive optimization of energy storage and standoff tracking for solar-powered UAV. IEEE Syst. J. 2020, 14, 5133–5143. [Google Scholar] [CrossRef]
- Klesh, A.T.; Kabamba, P.T. Solar-powered aircraft: Energy-optimal path planning and perpetual endurance. J. Guid. Control. Dyn. 2009, 32, 1320–1329. [Google Scholar] [CrossRef]
- Fu, Y.; Mei, H.; Wang, K.; Yang, K. Joint optimization of 3D trajectory and scheduling for solar-powered UAV systems. IEEE Trans. Veh. Technol. 2021, 70, 3972–3977. [Google Scholar] [CrossRef]
- Bondy, J.A. Graph Theory with Applications; Macmillan: London, UK, 1982. [Google Scholar]
- Hart, P.; Nilsson, N.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- LaValle, S.M.; Kuffner, J.J.; Donald, B. Rapidly-exploring random trees: Progress and prospects. Algorithmic Comput. Robot. New Dir. 2001, 5, 293–308. [Google Scholar]
- Huang, H.; Savkin, A.V. Path planning for a solar-powered UAV inspecting mountain sites for safety and rescue. Energies 2021, 14, 1968. [Google Scholar] [CrossRef]
- Wu, J.; Wang, H.; Li, N.; Yao, P.; Huang, Y.; Yang, H. Path planning for solar-powered UAV in urban environment. Neurocomputing 2018, 275, 2055–2065. [Google Scholar] [CrossRef]
- Wirth, L.; Oettershagen, P.; Ambühl, J.; Siegwart, R. Meteorological path planning using dynamic programming for a solar-powered UAV. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–11. [Google Scholar]
- Tuan, H.D.; Nasir, A.A.; Savkin, A.V.; Poor, H.V.; Dutkiewicz, E. MPC-based UAV navigation for simultaneous solar-energy harvesting and two-way communications. IEEE J. Sel. Areas Commun. 2021, 39, 3459–3474. [Google Scholar] [CrossRef]
- Lee, J.S.; Yu, K.H. Optimal Path Planning of Solar-Powered UAV Using Gravitational Potential Energy. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1442–1451. [Google Scholar] [CrossRef]
- Dai, R.; Lee, U.; Hosseini, S.; Mesbahi, M. Optimal path planning for solar-powered UAVs based on unit quaternions. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 3104–3109. [Google Scholar]
- Spangelo, S.C.; Gilbert, E.G. Power optimization of solar-powered aircraft with specified closed ground tracks. J. Aircr. 2013, 50, 232–238. [Google Scholar] [CrossRef]
- Hosseini, S.; Dai, R.; Mesbahi, M. Optimal path planning and power allocation for a long endurance solar-powered UAV. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 2588–2593. [Google Scholar]
- Lun, Y.; Wang, H.; Wu, J.; Liu, Y.; Wang, Y. Target Search in Dynamic Environments with Multiple Solar-Powered UAVs. IEEE Trans. Veh. Technol. 2022, 71, 9309–9321. [Google Scholar] [CrossRef]
- Kim, S.H.; Padilla, G.E.G.; Kim, K.J.; Yu, K.H. Flight path planning for a solar powered UAV in wind fields using direct collocation. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 1094–1105. [Google Scholar] [CrossRef]
- Li, S.; Wei, J. Energy-Aware 3D Navigation of a Solar-powered UAV in an Urban Environment. In Proceedings of the 2024 16th International Conference on Computer and Automation Engineering (ICCAE), Melbourne, Australia, 14–16 March 2024. [Google Scholar]
- Li, S.; Wei, J. A Hybrid Approach for Navigation of a Solar-powered UAV in a Dynamic Urban Environment. In Proceedings of the 2024 Australian & New Zealand Control Conference (ANZCC), Gold Coast, Australia, 1–2 February 2024. [Google Scholar]
- Gudmundsson, S.; Golubev, V.V.; Drakunov, S.; Reinholtz, C. A Biomimemic Energy-Conserving/Harvesting Trajectory Planning for a sUAV. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, San Antonio, TX, USA, 5–9 February 2017; p. 3889. [Google Scholar]
- Gudmundsson, S.; Golubev, V.; Drakunov, S.; Reinholtz, C. Bio-Inspired Methodologies for Energy Conservation and Harvesting Flight-Path Modeling for Unmanned Aerial System. J. Aerosp. Inf. Syst. 2019, 16, 289–295. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Di Franco, C.; Buttazzo, G. Energy-Aware Coverage Path Planning of UAVs. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal, 8–10 April 2015; pp. 111–117. [Google Scholar] [CrossRef]
- Vasisht, S.; Mesbahi, M. Trajectory design and coverage control for solar-powered UAVs. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 21 June 2015; p. 1314. [Google Scholar]
- Du, N.; Zhang, Z.; Chen, J.; Liu, X.; Zhang, K.; Ma, B. A Coverage Path Planning Method Based on Multiple Solar Powered Unmanned Aerial Vehicles. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems and Artificial Intelligence (ICUSAI), Xi’an, China, 22–24 November 2019; pp. 131–135. [Google Scholar]
- Huang, H.; Savkin, A.V.; Huang, C. Autonomous Navigation and Deployment of UAVs for Communication, Surveillance and Delivery; John Wiley & Sons: Hoboken, NJ, USA, 2022. [Google Scholar]
- Lin, N.; Liu, Y.; Zhao, L.; Wu, D.O.; Wang, Y. An adaptive UAV deployment scheme for emergency networking. IEEE Trans. Wirel. Commun. 2021, 21, 2383–2398. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, M.; Feng, G.; Qin, S.; Wei, F. Autonomous On-Demand Deployment for UAV Assisted Wireless Networks. IEEE Trans. Wirel. Commun. 2023, 22, 9488–9501. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, H.; Wu, W.; Wei, J. Deployment algorithms for UAV airborne networks toward on-demand coverage. IEEE J. Sel. Areas Commun. 2018, 36, 2015–2031. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Alzenad, M.; El-Keyi, A.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station for maximum coverage of users with different QoS requirements. IEEE Wirel. Commun. Lett. 2017, 7, 38–41. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, C.; Ni, W. Joint multi-UAV path planning and LoS communication for mobile-edge computing in IoT networks with RISs. IEEE Internet Things J. 2022, 10, 2720–2727. [Google Scholar] [CrossRef]
- Xu, Y.; Zhu, W.; Li, J.; Zhang, L. Improvement of endurance performance for high-altitude solar-powered airships: A review. Acta Astronaut. 2020, 167, 245–259. [Google Scholar] [CrossRef]
- Galan-Jimenez, J.; Moguel, E.; Garcia-Alonso, J.; Berrocal, J. Energy-efficient and solar powered mission planning of UAV swarms to reduce the coverage gap in rural areas: The 3D case. Ad. Hoc. Netw. 2021, 118, 102517. [Google Scholar] [CrossRef]
- Jiang, Q.; Zhu, H.; Qiao, Y.; He, Z.; Liu, D.; Huang, B. Agent evaluation in deployment of multi-SUAVs for communication recovery. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 6968–6982. [Google Scholar] [CrossRef]
- Lei, X.; Hu, X.; Wang, G.; Luo, H. A multi-UAV deployment method for border patrolling based on Stackelberg game. J. Syst. Eng. Electron. 2023, 34, 99–116. [Google Scholar] [CrossRef]
- Mohamadi, H.E.; Kara, N.; Lagha, M. Efficient algorithms for decision making and coverage deployment of connected multi-low-altitude platforms. Expert Syst. Appl. 2021, 184, 115529. [Google Scholar] [CrossRef]
- Tahilyani, S.; Saxena, S.; Karras, D.A.; Gupta, S.K.; Dixit, C.K.; Haralayya, B. Deployment of Autonomous Vehicles in Agricultural and using Voronoi Partitioning. In Proceedings of the 2022 International Conference on Knowledge Engineering and Communication Systems (ICKES), Chickballapur, India, 28–29 December 2022. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.A.H.; Campbell, J.F.; Golden, B.L.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Huang, C. Round trip routing for energy-efficient drone delivery based on a public transportation network. IEEE Trans. Transp. Electrif. 2020, 6, 1368–1376. [Google Scholar] [CrossRef]
- Hong, Y.; Jung, S.; Kim, S.; Cha, J. Multi-UAV routing with priority using mixed integer linear programming. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020; pp. 699–702. [Google Scholar]
- Culligan, K.; Valenti, M.; Kuwata, Y.; How, J.P. Three-dimensional flight experiments using on-line mixed-integer linear programming trajectory optimization. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 5322–5327. [Google Scholar]
- Zhao, C.; Liu, Y.; Yu, L.; Li, W. Stochastic Heuristic Algorithms for Multi-UAV Cooperative Path Planning. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 7677–7682. [Google Scholar]
- Cho, J.W.; Kim, J.H. Performance comparison of heuristic algorithms for UAV deployment with low power consumption. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 17–19 October 2018; pp. 1067–1069. [Google Scholar]
- Xiao, J.; Zhang, T.; Du, J.; Zhang, X. An evolutionary multiobjective route grouping-based heuristic algorithm for large-scale capacitated vehicle routing problems. IEEE Trans. Cybern. 2019, 51, 4173–4186. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.H.; Wang, D.B.; Ali, Z.A.; Ting Ting, B.; Wang, H. An overview of various kinds of wind effects on unmanned aerial vehicle. Meas. Control 2019, 52, 731–739. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Deployment of heterogeneous UAV base stations for optimal quality of coverage. IEEE Internet Things J. 2022, 9, 16429–16437. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. A method for optimized deployment of unmanned aerial vehicles for maximum coverage and minimum interference in cellular networks. IEEE Trans. Ind. Inform. 2018, 15, 2638–2647. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Mu, X.; Hou, T.; Xu, J.; Di Renzo, M.; Al-Dhahir, N. Reconfigurable intelligent surfaces: Principles and opportunities. IEEE Commun. Surv. Tutor. 2021, 23, 1546–1577. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, C.; Ni, W. Collision-Free 3-D Navigation of a UAV Team for Optimal Data Collection in Internet-of-Things Networks With Reconfigurable Intelligent Surfaces. IEEE Syst. J. 2023, 17, 4070–4077. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, C.; Ni, W. On-Demand Deployment of Aerial Base Stations for Coverage Enhancement in Reconfigurable Intelligent Surface-Assisted Cellular Networks on Uneven Terrains. IEEE Commun. Lett. 2022, 27, 666–670. [Google Scholar] [CrossRef]
- Eskandari, M.; Savkin, A.V. Trajectory Planning for UAVs equipped with RISs to Provide Aerial LoS Service for Mobile Nodes in 5G/Optical Wireless Communication Networks. IEEE Trans. Veh. Technol. 2023, 72, 8216–8221. [Google Scholar] [CrossRef]
- Eskandari, M.; Huang, H.; Savkin, A.V.; Ni, W. Model Predictive Control-Based 3D Navigation of a RIS-Equipped UAV for LoS Wireless Communication With a Ground Intelligent Vehicle. IEEE Trans. Intell. Veh. 2023, 8, 2371–2384. [Google Scholar] [CrossRef]
- Stodola, P.; Drozd, J.; Mazal, J.; Hodickỳ, J.; Procházka, D. Cooperative unmanned aerial system reconnaissance in a complex urban environment and uneven terrain. Sensors 2019, 19, 3754. [Google Scholar] [CrossRef]
- Savkin, A.V.; Verma, S.C.; Ni, W. Autonomous UAV 3D trajectory optimization and transmission scheduling for sensor data collection on uneven terrains. Def. Technol. 2023, 30, 154–160. [Google Scholar] [CrossRef]
- Butzke, J.; Gochev, K.; Holden, B.; Jung, E.J.; Likhachev, M. Planning for a ground-air robotic system with collaborative localization. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 284–291. [Google Scholar]
- Lee, J.K.; Jung, H.; Hu, H.; Kim, D.H. Collaborative control of UAV/UGV. In Proceedings of the 2014 11th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Kuala Lumpur, Malaysia, 12–15 November 2014; pp. 641–645. [Google Scholar]
- Savkin, A.V.; Huang, H. Navigation of a network of aerial drones for monitoring a frontier of a moving environmental disaster area. IEEE Syst. J. 2020, 14, 4746–4749. [Google Scholar] [CrossRef]
- Nedjati, A.; Vizvari, B.; Izbirak, G. Post-earthquake response by small UAV helicopters. Nat. Hazards 2016, 80, 1669–1688. [Google Scholar] [CrossRef]
- Amici, S.; Turci, M.; Giulietti, F.; Giammanco, S.; Buongiorno, M.; La Spina, A.; Spampinato, L. Volcanic environments monitoring by drones mud volcano case study. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 5–10. [Google Scholar] [CrossRef]
- Beni, E.D.; Cantarero, M.; Messina, A. UAVs for volcano monitoring: A new approach applied on an active lava flow on Mt. Etna (Italy), during the 27 February–02 March 2017 eruption. J. Volcanol. Geotherm. Res. 2019, 369, 250–262. [Google Scholar] [CrossRef]
- Bonali, F.L.; Tibaldi, A.; Marchese, F.; Fallati, L.; Russo, E.; Corselli, C.; Savini, A. UAV-based surveying in volcano-tectonics: An example from the Iceland rift. J. Struct. Geol. 2019, 121, 46–64. [Google Scholar] [CrossRef]
- Jordan, B.R. Collecting field data in volcanic landscapes using small UAS (sUAS)/drones. J. Volcanol. Geotherm. Res. 2019, 385, 231–241. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Baylis, S.M.; Mott, R.; Herrod, A.; Clarke, R.H. Precision wildlife monitoring using unmanned aerial vehicles. Sci. Rep. 2016, 6, 22574. [Google Scholar] [CrossRef] [PubMed]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UASs) the future of wildlife monitoring? A review of accomplishments and challenges. Mamm. Rev. 2015, 45, 239–252. [Google Scholar] [CrossRef]
- Gonzalez, L.F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned aerial vehicles (UAVs) and artificial intelligence revolutionizing wildlife monitoring and conservation. Sensors 2016, 16, 97. [Google Scholar] [CrossRef] [PubMed]
- Savkin, A.V.; Huang, H. Bioinspired bearing only motion camouflage UAV guidance for covert video surveillance of a moving target. IEEE Syst. J. 2020, 15, 5379–5382. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV remote sensing applications in marine monitoring: Knowledge visualization and review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Li, Z.; Wang, T.; Xu, X.; Zhang, X.; Li, D. Intelligent fish farm—The future of aquaculture. Aquac. Int. 2021, 29, 2681–2711. [Google Scholar] [CrossRef] [PubMed]
- Anggraeni, D.; Udhiarto, A.; Wirawan, A.; Ramadian, A.; Poespawati, N. Development and analysis characteristic solar powered system on LAPAN surveillance UAV 03 (LSU 03). AIP Conf. Proc. 2019, 2088, 030023. [Google Scholar]
- Romeo, G.; Cestino, E.; Borello, F.; Pacino, M. Very-Long Endurance Solar Powered Autonomous UAVs: Role and Constraints for GMEs Applications. In Proceedings of the 28th International Congress of the Aeronautical Sciences–ICAS, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Yang, X.; Pei, X. Hybrid system for powering unmanned aerial vehicles: Demonstration and study cases. In Hybrid Technologies for Power Generation; Elsevier: Amsterdam, The Netherlands, 2022; pp. 439–473. [Google Scholar]
- Colefax, A.P. Developing the Use of Drones for Non-Destructive Shark Management and Beach Safety. Ph.D. Thesis, Southern Cross University, Lismore, NSW, Australia, 2020. [Google Scholar]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Li, K.; Ni, W.; Dressler, F. Continuous maneuver control and data capture scheduling of autonomous drone in wireless sensor networks. IEEE Trans. Mob. Comput. 2021, 21, 2732–2744. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A survey on machine-learning techniques for UAV-based communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory design and power control for multi-UAV assisted wireless networks: A machine learning approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef]
- Makineci, H.B.; Karabörk, H.; Durdu, A. ANN estimation model for photogrammetry-based UAV flight planning optimisation. Int. J. Remote Sens. 2022, 43, 5686–5708. [Google Scholar] [CrossRef]
- Salgado, M.E.; Goodwin, G.C.; Graebe, S.F. Control System Design; Prentice-Hall: Englewood Cliffs, NJ, USA, 2001. [Google Scholar]
- Savkin, A.V.; Evans, R.J. Hybrid Dynamical Systems: Controller and Sensor Switching Problems; Springer Science & Business Media: New York, NY, USA, 2002. [Google Scholar]
- Tao, L.; Zhou, Y.; Zicun, L.; Zhang, X. State of art on energy management strategy for hybrid-powered unmanned aerial vehicle. Chin. J. Aeronaut. 2019, 32, 1488–1503. [Google Scholar]
- Panagiotou, P.; Tsavlidis, I.; Yakinthos, K. Conceptual design of a hybrid solar MALE UAV. Aerosp. Sci. Technol. 2016, 53, 207–219. [Google Scholar] [CrossRef]
- Sekander, S.; Tabassum, H.; Hossain, E. Statistical performance modeling of solar and wind-powered UAV communications. IEEE Trans. Mob. Comput. 2020, 20, 2686–2700. [Google Scholar] [CrossRef]
- Van Nguyen, C.; Van Quyen, T.; Le, A.M.; Truong, L.H.; Nguyen, M.T. Advanced hybrid energy harvesting systems for unmanned aerial vehicles (UAVs). Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 34–39. [Google Scholar] [CrossRef]
- Xu, X.; Zhao, Y.; Tao, L.; Xu, Z. Resource allocation strategy for dual UAVs-assisted MEC system with hybrid solar and RF energy harvesting. In Proceedings of the 2021 3rd International Conference on Computer Communication and the Internet (ICCCI), Nagoya, Japan, 25–27 June 2021; pp. 52–57. [Google Scholar]

{kind=link}
| Ref. | Number of SUAVs | Number of Targets | Target State |
|---|---|---|---|
| [23] | Single | Single | Fixed |
| [24] | Multiple | Single | Fixed |
| [25] | Single | Single | Moving |
| [26] | Single | Single | Moving |
| [27] | Single | Single | Moving |
| [28] | Single | Single | Moving |
| [29] | Multiple | Single | Moving |
| [30] | Multiple | Multiple | Moving |
| Ref. | Navigation Strategy | Number of SUAVs |
|---|---|---|
| [23] | Optimization | Single |
| [24] | Optimization | Single |
| [26] | Distributed model predictive control | Multiple |
| [27] | Particle swarm optimization | Multiple |
| [29] | RRT | Multiple |
| [30] | RRT | Multiple |
| [31] | Optimization | Single |
| [45] | Optimization | Single |
| [47] | RRT | Single |
| [48] | RRT | Single |
| [50] | Monotonic optimization | Single |
| [74] | Optimization | Single |
| [78] | RRT | Single |
| [79] | Whale optimization algorithm | Single |
| [80] | Dynamic programming | Single |
| [81] | Model predictive control | Single |
| [82] | Optimization | Single |
| [83] | Optimization | Single |
| [84] | Optimization | Single |
| [85] | Optimization | Single |
| [86] | Optimization | Multiple |
| [87] | Optimization | Single |
| [88] | Optimization | Single |
| [89] | Optimization | Single |
| [90] | Optimization | Single |
| [91] | Optimization | Single |
| Method | Advantages | Disadvantages | Task Types |
|---|---|---|---|
| LP | High precision, considers many constraints | High computational complexity, inefficient for large scale | Multi-UAV routing [111] |
| LP | Real-time optimization, suitable for dynamic environments | High computational resources | Real-time path planning [112] |
| Heuristic | High computational efficiency, adaptability | Lower accuracy than ILP | Cooperative path planning [113] |
| Heuristic | Flexible, scenario-specific adjustment | Specific adjustments for complex scenarios | UAV deployment [114] |
| Heuristic | Suitable for large-scale problems | May not guarantee optimal solution | Large-scale path planning [115] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Fang, Z.; Verma, S.C.; Wei, J.; Savkin, A.V. Navigation and Deployment of Solar-Powered Unmanned Aerial Vehicles for Civilian Applications: A Comprehensive Review. Drones 2024, 8, 42. https://doi.org/10.3390/drones8020042
Li S, Fang Z, Verma SC, Wei J, Savkin AV. Navigation and Deployment of Solar-Powered Unmanned Aerial Vehicles for Civilian Applications: A Comprehensive Review. Drones. 2024; 8(2):42. https://doi.org/10.3390/drones8020042
Chicago/Turabian StyleLi, Siyuan, Zixuan Fang, Satish C. Verma, Jingwen Wei, and Andrey V. Savkin. 2024. "Navigation and Deployment of Solar-Powered Unmanned Aerial Vehicles for Civilian Applications: A Comprehensive Review" Drones 8, no. 2: 42. https://doi.org/10.3390/drones8020042
APA StyleLi, S., Fang, Z., Verma, S. C., Wei, J., & Savkin, A. V. (2024). Navigation and Deployment of Solar-Powered Unmanned Aerial Vehicles for Civilian Applications: A Comprehensive Review. Drones, 8(2), 42. https://doi.org/10.3390/drones8020042