
Trajectory-Tracking Control for Quadrotors Using an Adaptive Integral Terminal Sliding Mode under External Disturbances


Abstract
:1. Introduction
- A new control scheme is introduced for quadrotors under subjection to external disturbances.
- The proposed ABFNITSM control is characterized by strong robustness against nonlinearities and external disturbances, offering quicker responsivity and more precise tracking compared to traditional control methods.
- With the implementation of adaptive estimation, the controller parameters can be updated online, streamlining the tuning process. Furthermore, the dead zone technique was employed to compensate for disturbances.
- A new, differentiable saturation function was utilized to eradicate chattering efficiently.
- The stability of the quadrotor trajectory tracking control system was verified by the application of Lyapunov theory.
2. Dynamic Model of the Quadrotor
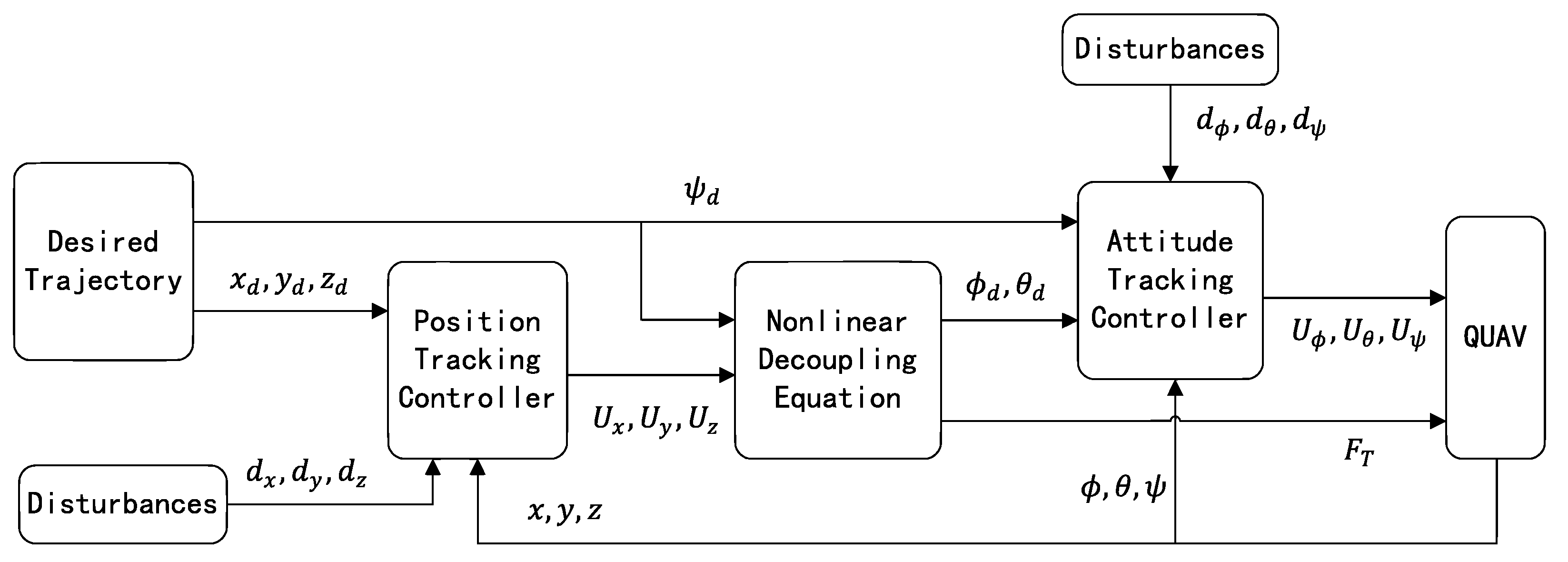
3. Control Scheme Design
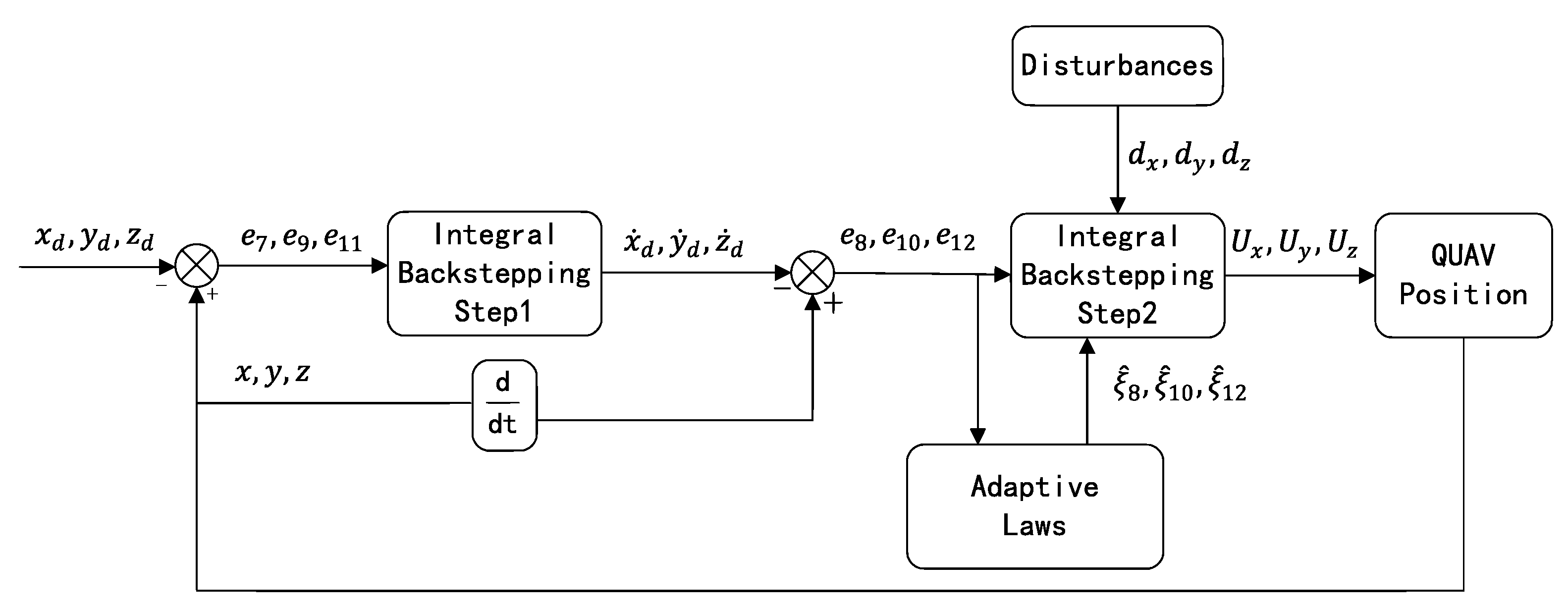
3.1. Position-Tracking Control Design
- AIBS control design step 1:
- AIBS control design step 2:
- Proof of stability of position-tracking control:
- Adaptive laws:
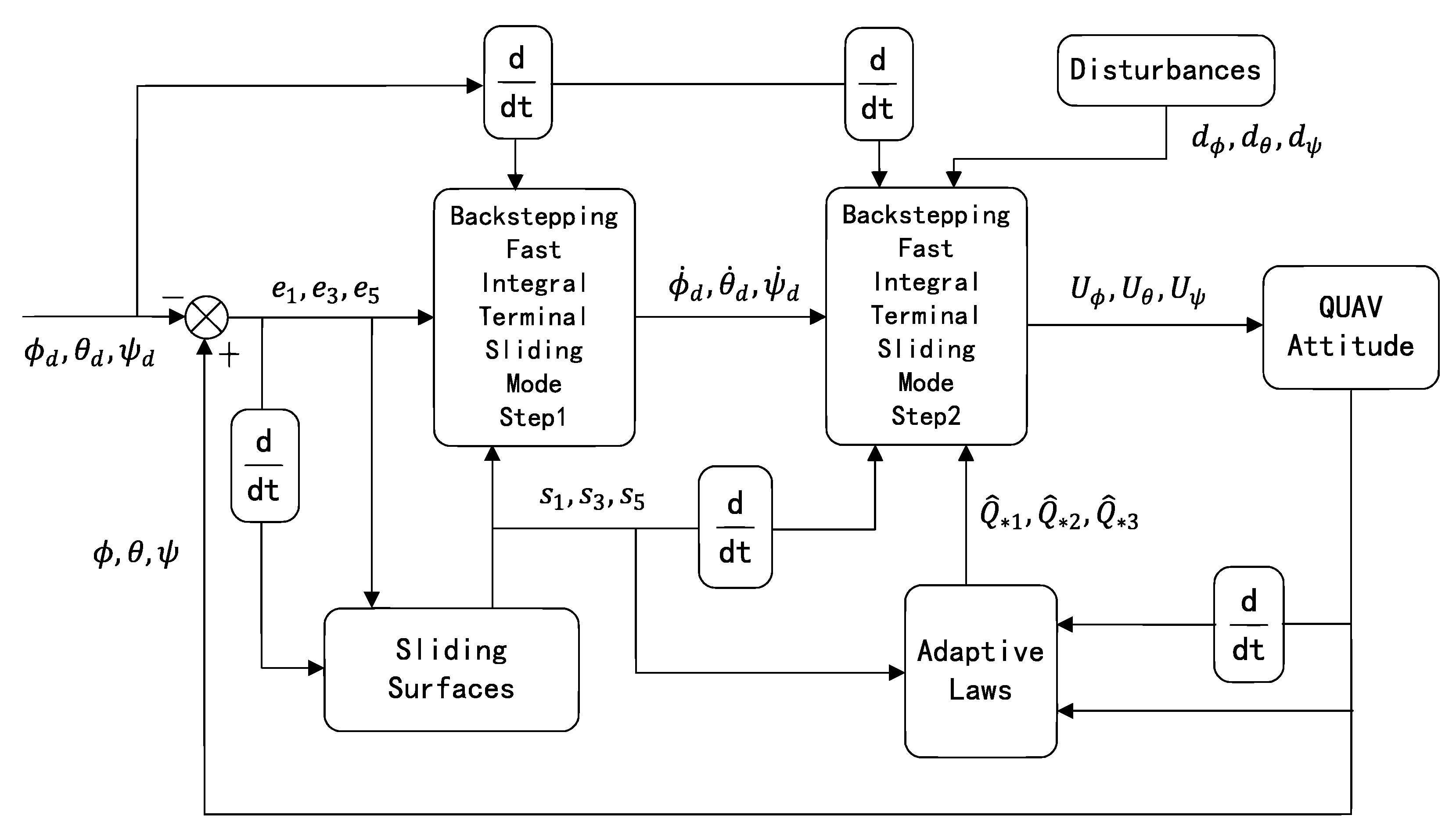
3.2. Attitude-Tracking Control Design
- ABFNITSM control design step 1:
- ABFNITSM control design step 2:
- Adaptive estimation algorithm:
- Dead zone technique:
- Proof of the stability of attitude-tracking control:
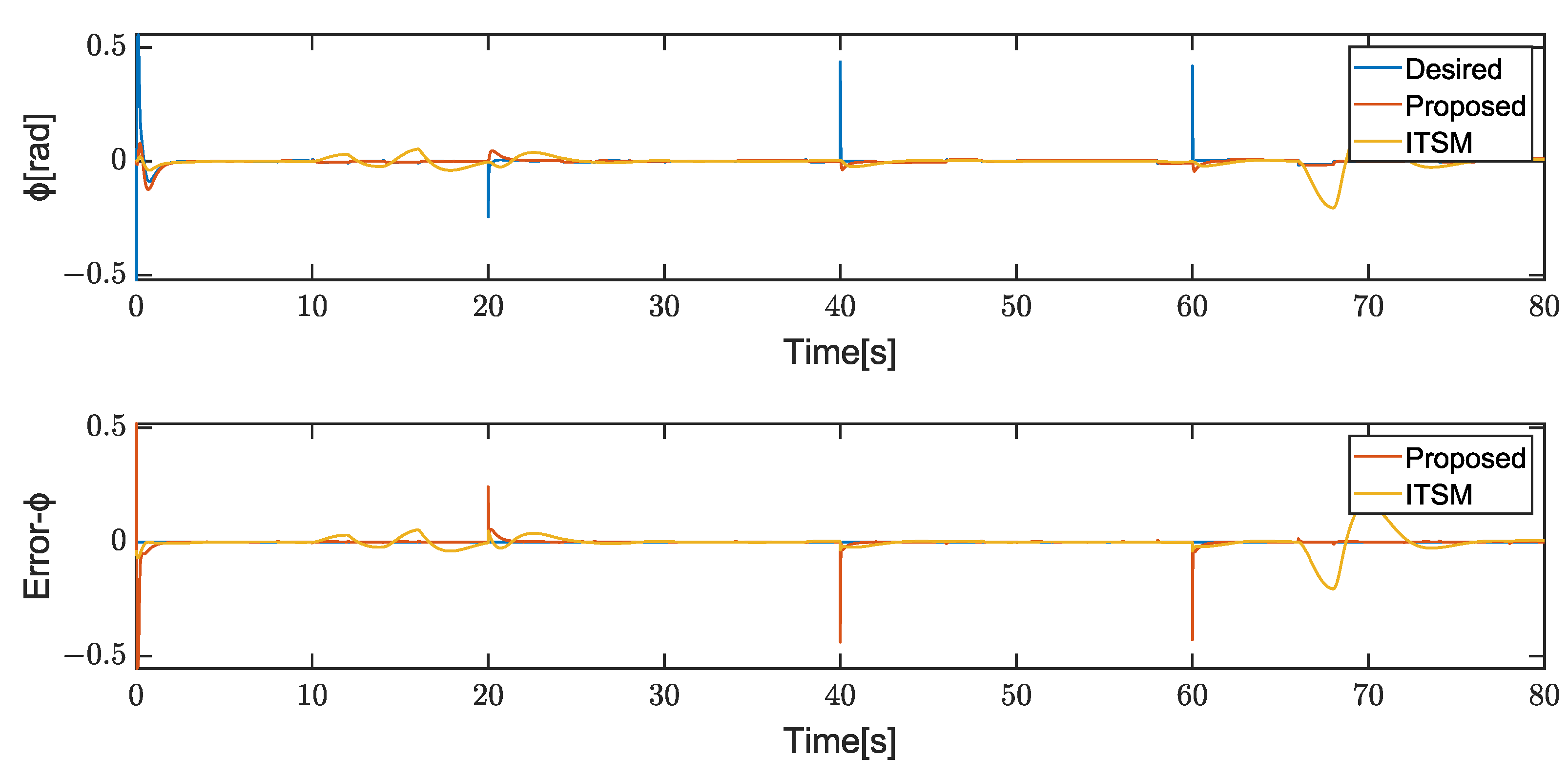
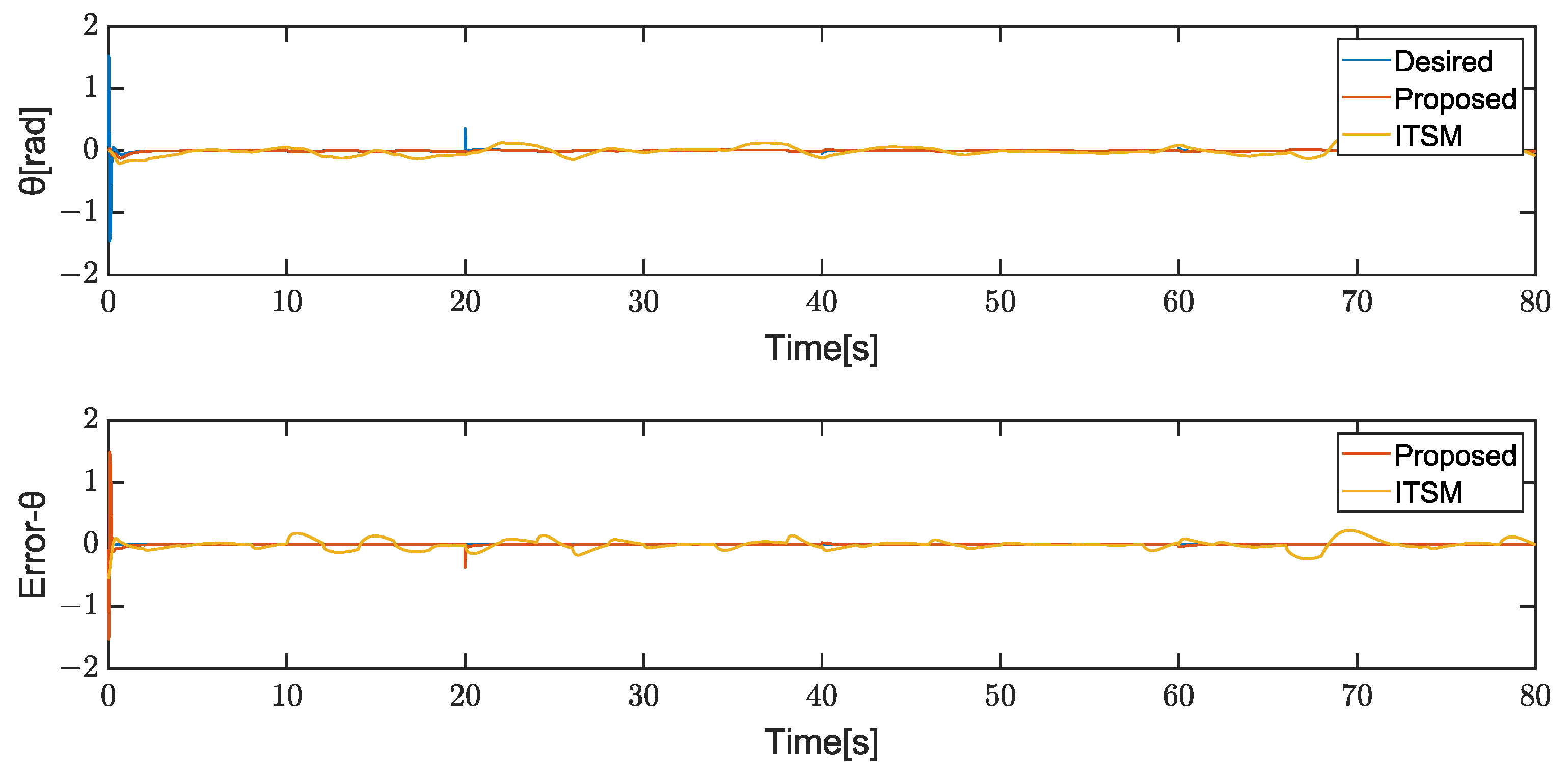
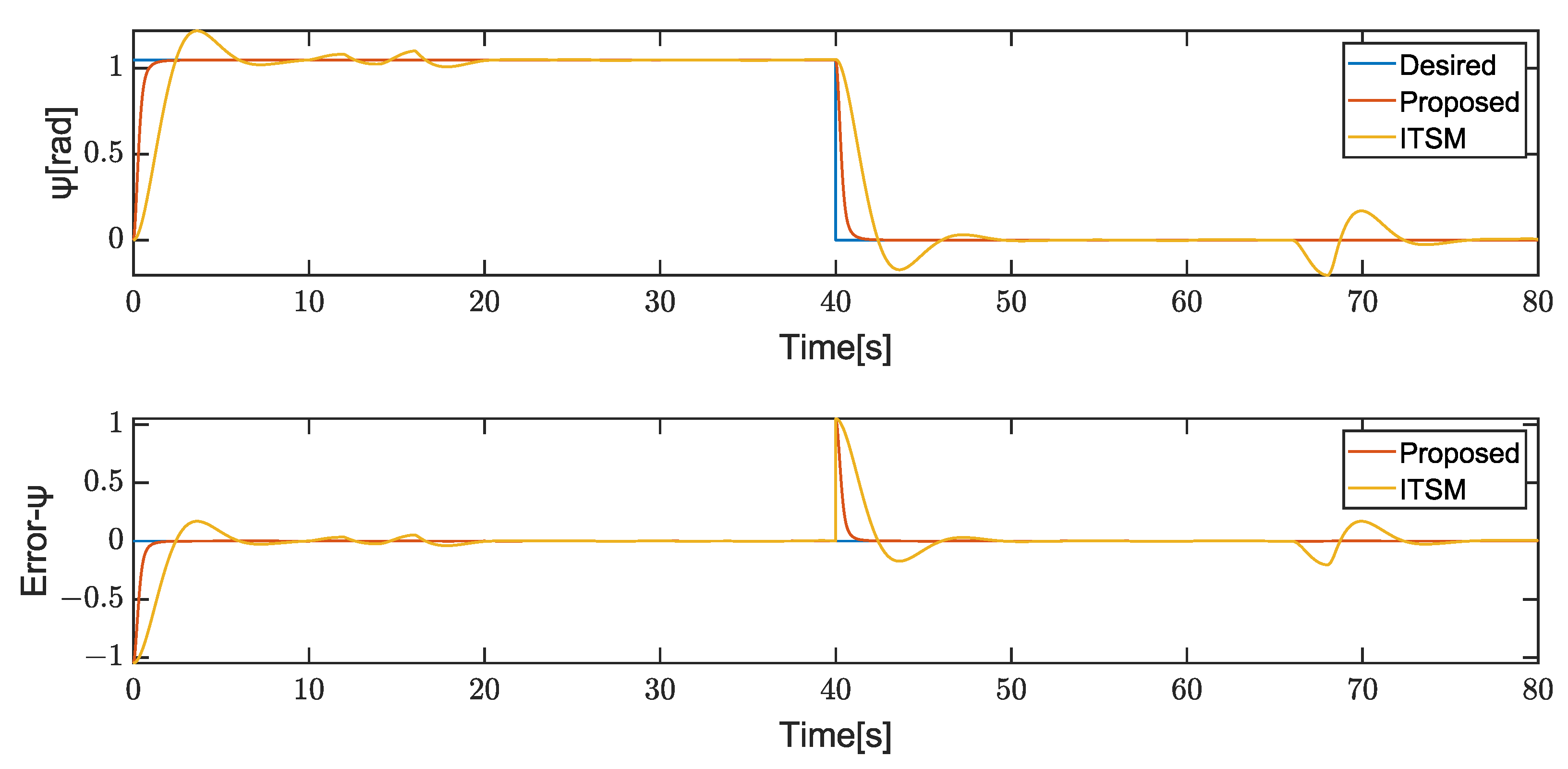
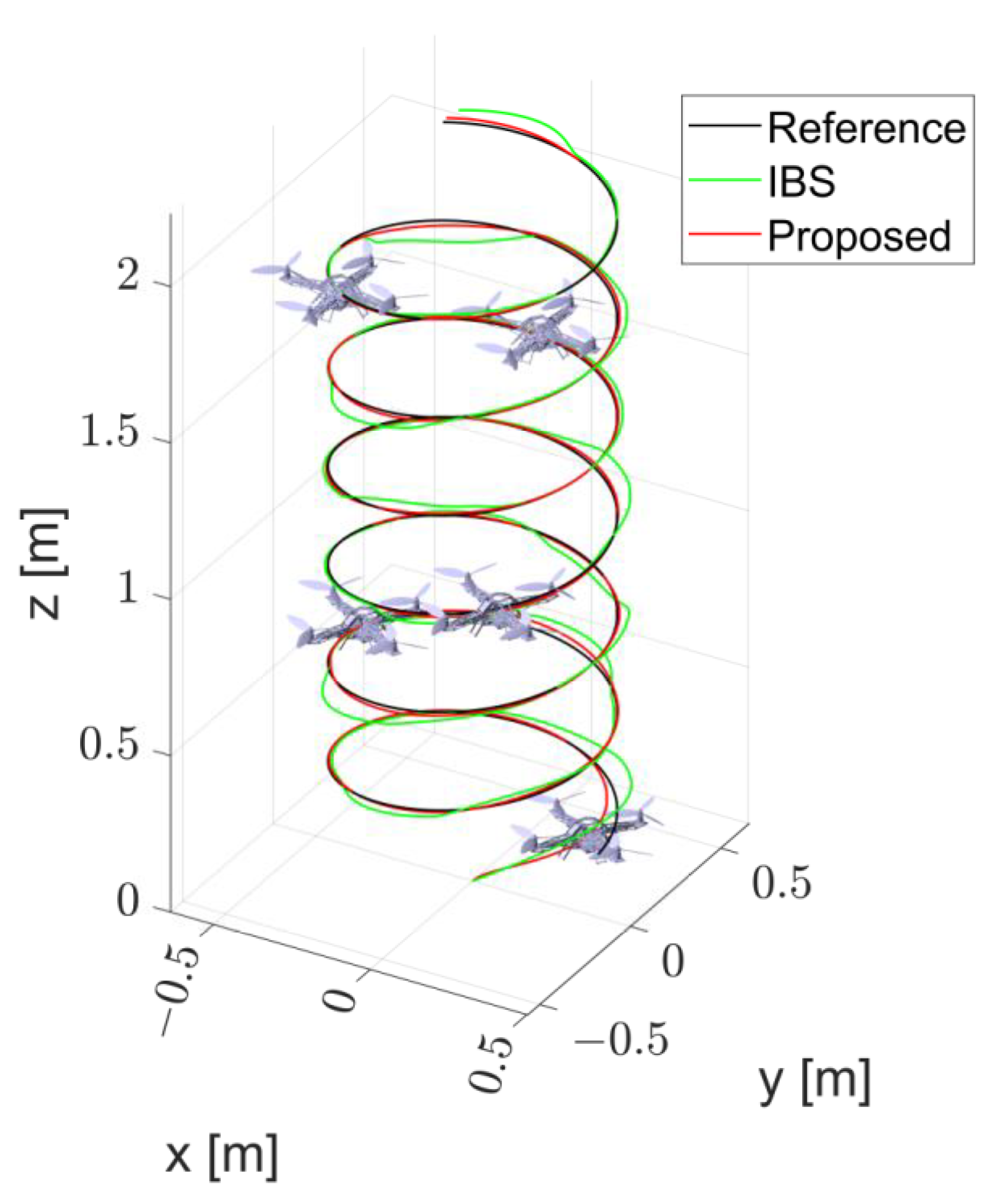
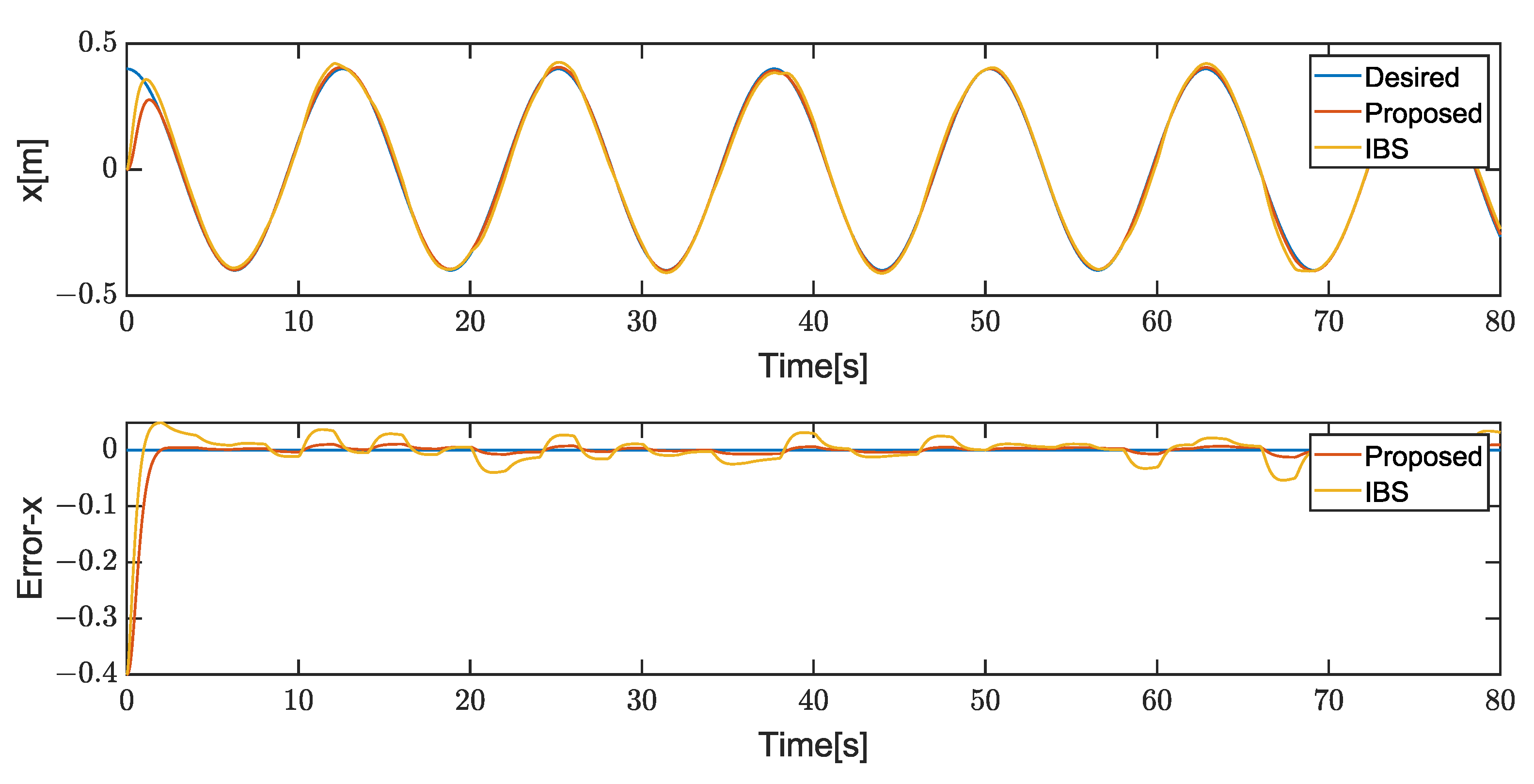
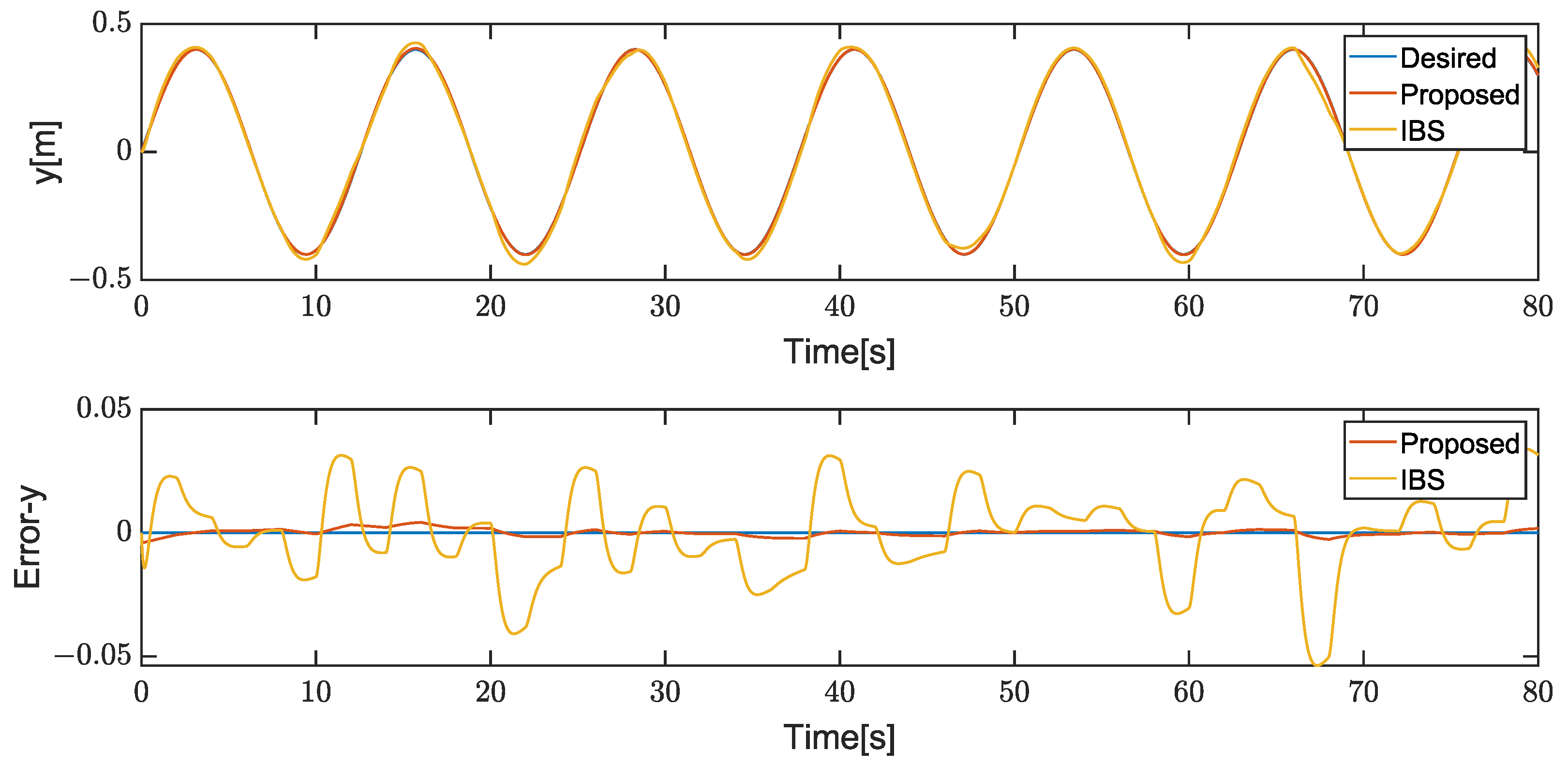
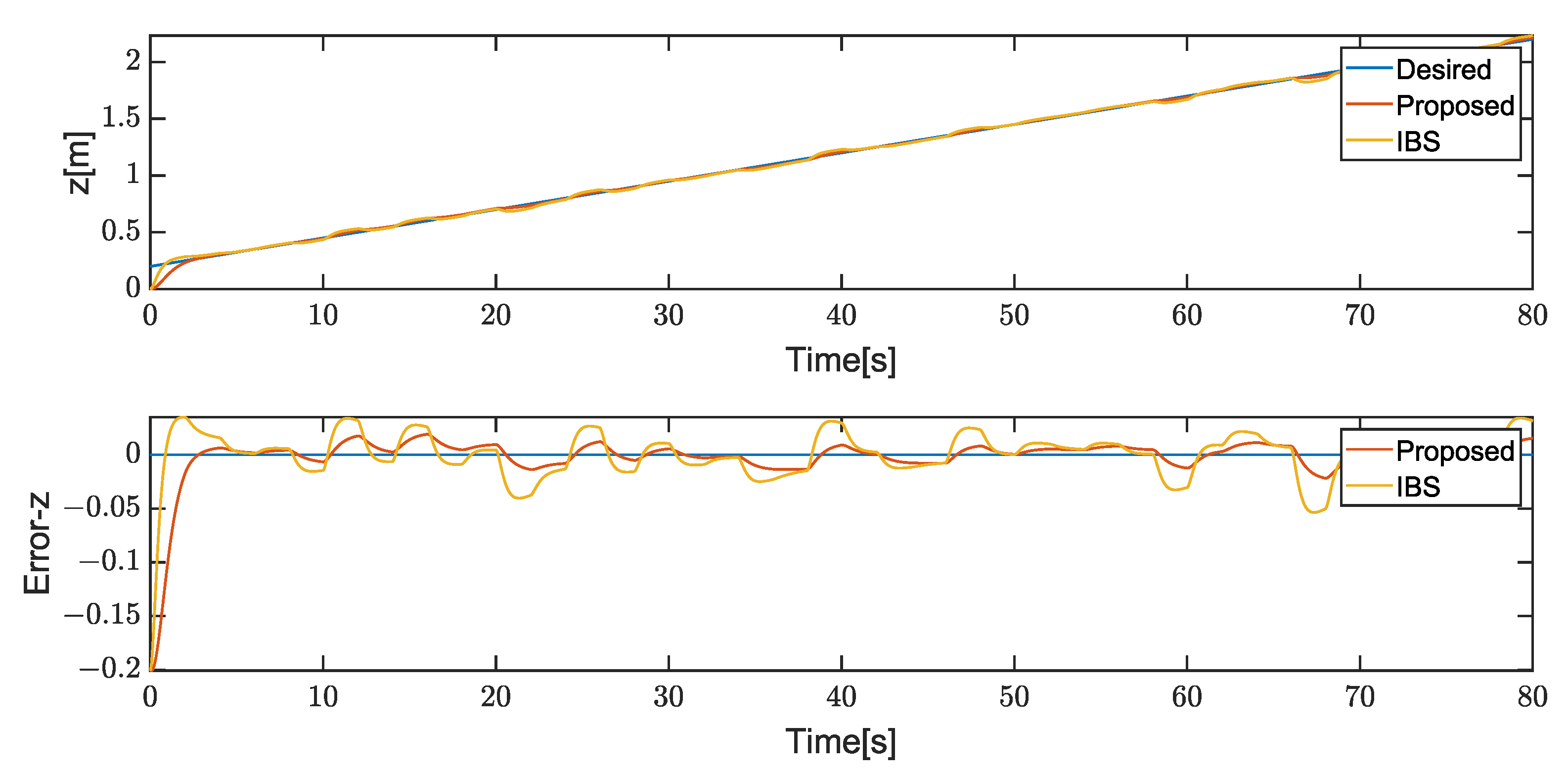
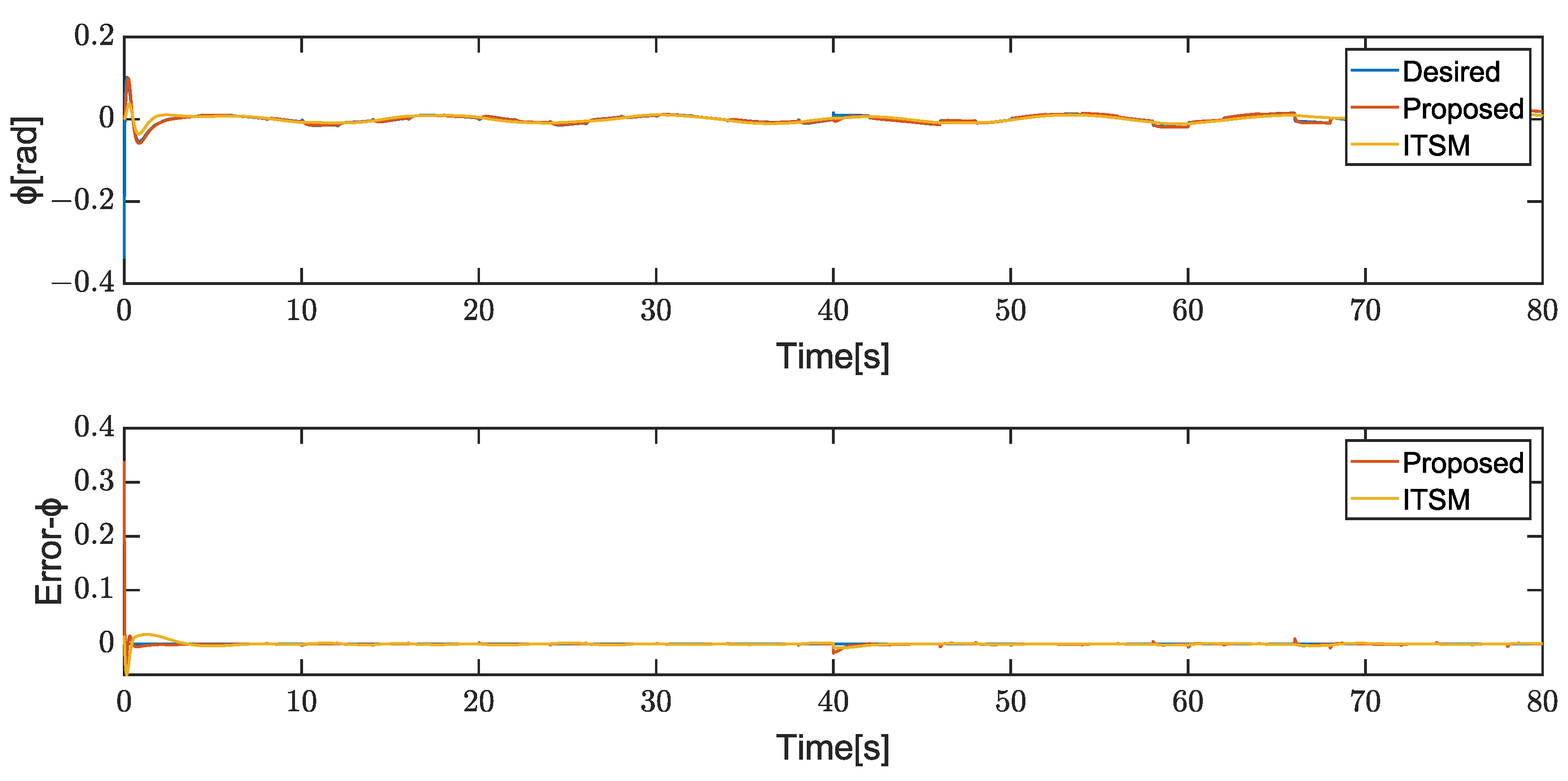
4. Results
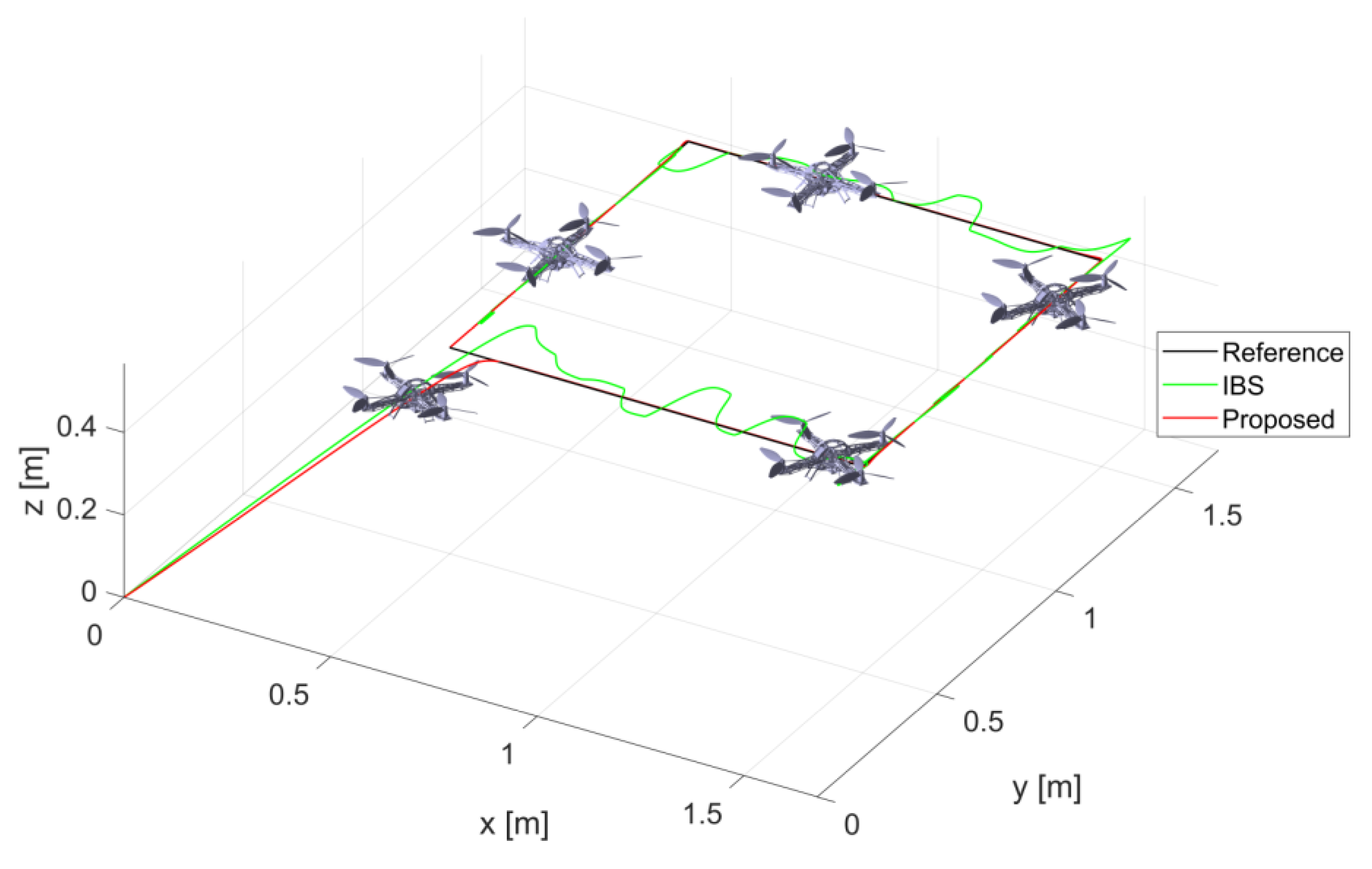
4.1. Case1
4.2. Case2
5. Conclusions
6. Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Assumptions
- The quadrotor structure is symmetric.
- The geometric center of the quadrotor coincides with its center of gravity.
- The forces and torques generated by air friction are proportional to the quadrotor’s velocity and the square of the quadrotor’s angular velocity, respectively.
- External disturbances enter the system in the form of acceleration.
- The forces and moments generated by the motors are proportional to the square of the motor speeds.
References
- Liang, X.; Yu, H.; Zhang, Z.; Liu, H.; Fang, Y.; Han, J. Unmanned aerial transportation system with flexible connection between the quadrotor and the payload: Modeling, controller design, and experimental validation. IEEE Trans. Ind. Electron. 2022, 70, 1870–1882. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, Q.; Ren, B. Wind Turbine Crack Inspection Using a Quadrotor with Image Motion Blur Avoided. IEEE Robot. Autom. Lett. 2023, 8, 1069–1076. [Google Scholar] [CrossRef]
- Huang, T.; Huang, D.; Wang, Z.; Dai, X.; Shah, A. Generic adaptive sliding mode control for a quadrotor UAV system subject to severe parametric uncertainties and fully unknown external disturbance. Int. J. Control Autom. Syst. 2021, 19, 698–711. [Google Scholar] [CrossRef]
- Li, B.; Gong, W.; Yang, Y.; Xiao, B.; Ran, D. Appointed fixed time observer-based sliding mode control for a quadrotor UAV under external disturbances. IEEE Trans. Aerosp. Electron. Sys. 2021, 58, 290–303. [Google Scholar] [CrossRef]
- Pan, J.; Shao, B.; Xiong, J.; Zhang, Q. Attitude control of quadrotor UAVs based on adaptive sliding mode. Int. J. Control Autom. Syst. 2023, 21, 2698–2707. [Google Scholar] [CrossRef]
- Pouzesh, M.; Mobayen, S. Event-triggered fractional-order sliding mode control technique for stabilization of disturbed quadrotor unmanned aerial vehicles. Aerosp. Sci. Technol. 2022, 121, 107337. [Google Scholar] [CrossRef]
- Sonugür, G. A Review of quadrotor UAV: Control and SLAM methodologies ranging from conventional to innovative approaches. Robot. Auton. Syst. 2023, 161, 104342. [Google Scholar] [CrossRef]
- Xiong, J.; Pan, J.; Chen, G.; Zhang, X.; Ding, F. Sliding mode dual-channel disturbance rejection attitude control for a quadrotor. IEEE Trans. Ind. Electron. 2021, 69, 10489–10499. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive nonsingular fast terminal sliding-mode tracking control for an uncertain quadrotor UAV subjected to disturbances. ISA Trans. 2020, 99, 290–304. [Google Scholar] [CrossRef]
- Rojsiraphisal, T.; Mobayen, S.; Asad, J.H.; Vu, M.T.; Chang, A.; Puangmalai, J. Fast terminal sliding control of underactuated robotic systems based on disturbance observer with experimental validation. Mathematics 2021, 9, 1935. [Google Scholar] [CrossRef]
- Lim, D.; Kim, H.; Yee, K. Uncertainty propagation in flight performance of multirotor with parametric and model uncertainties. Aerosp. Sci. Technol. 2022, 122, 107398. [Google Scholar] [CrossRef]
- Kim, H.; Ahn, H.; Chung, Y.; You, K. Quadrotor Position and Attitude Tracking Using Advanced Second-Order Sliding Mode Control for Disturbance. Mathematics 2023, 11, 4786. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y.; Wu, H.; Suzuki, S.; Namiki, A.; Wang, W. Design and Application of a UAV Autonomous Inspection System for High-Voltage Power Transmission Lines. Remote Sens. 2023, 15, 865. [Google Scholar] [CrossRef]
- Ha, Q.M.; Deville, Y.; Pham, Q.D.; Hà, M.H. On the min-cost traveling salesman problem with drone. Transp. Res. Part C Emerg. Technol. 2018, 86, 597–621. [Google Scholar] [CrossRef]
- Wang, C.; Liu, Y.; Zhang, Z.; Han, L.; Li, Y.; Zhang, H.; Wongsuk, S.; Wu, X.; He, X. Spray performance evaluation of a six-rotor unmanned aerial vehicle sprayer for pesticide application using an orchard operation mode in apple orchards. Pest Manag. Sci. 2022, 78, 2449–2466. [Google Scholar] [CrossRef] [PubMed]
- Nair, A.P.; Selvaganesan, N.; Lalithambika, V.R. Lyapunov based PD/PID in model reference adaptive control for satellite launch vehicle systems. Aerosp. Sci. Technol. 2016, 51, 70–77. [Google Scholar] [CrossRef]
- Zhengxi, W.; Yang, C.; Xiujuan, Z.; Lei, C. Quadrotor UAV Control with Disturbance Based on Aerodynamic Parameter Estimation. Inf. Control 2018, 47, 663–670. [Google Scholar]
- Li, C.; Wang, Y.; Yang, X. Adaptive fuzzy control of a quadrotor using disturbance observer. Aerosp. Sci. Technol. 2022, 128, 107784. [Google Scholar] [CrossRef]
- Guettal, L.; Chelihi, A.; Ajgou, R.; Touba, M.M. Robust tracking control for quadrotor with unknown nonlinear dynamics using adaptive neural network based fractional-order backstepping control. J. Frankl. Inst. 2022, 359, 7337–7364. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.; Huang, K.; Wang, H.; Man, Z.; Fu, M. Finite-time control of a linear motor positioner using adaptive recursive terminal sliding mode. IEEE Trans. Ind. Electron. 2019, 67, 6659–6668. [Google Scholar] [CrossRef]
- Cui, R.; Chen, L.; Yang, C.; Chen, M. Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities. IEEE T. Ind. Electron. 2017, 64, 6785–6795. [Google Scholar] [CrossRef]
- Labbadi, M.; Muñoz-Vázquez, A.J.; Djemai, M.; Boukal, Y.; Zerrougui, M.; Cherkaoui, M. Fractional-order nonsingular terminal sliding mode controller for a quadrotor with disturbances. Appl. Math. Model. 2022, 111, 753–776. [Google Scholar] [CrossRef]
- Lian, S.; Meng, W.; Shao, K.; Zheng, J.; Zhu, S.; Li, H. Full Attitude Control of a Quadrotor Using Fast Nonsingular Terminal Sliding Mode with Angular Velocity Planning. IEEE Trans. Ind. Electron. 2022, 70, 3975–3984. [Google Scholar] [CrossRef]
- Ebrahimi, N.; Ozgoli, S.; Ramezani, A. Model-free high-order terminal sliding mode controller for Lipschitz nonlinear systems. Implemented on Exoped® exoskeleton robot. Int. J. Syst. Sci. 2021, 52, 1061–1073. [Google Scholar] [CrossRef]
- Abaunza, H.; Castillo, P. Quadrotor aggressive deployment, using a quaternion-based spherical chattering-free sliding-mode controller. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 1979–1991. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Zhang, C.; Esakki, B. Desired tracking of delayed quadrotor UAV under model uncertainty and wind disturbance using adaptive super-twisting terminal sliding mode control. ISA Trans. 2022, 123, 455–471. [Google Scholar] [CrossRef]
- Ghadiri, H.; Emami, M.; Khodadadi, H. Adaptive super-twisting non-singular terminal sliding mode control for tracking of quadrotor with bounded disturbances. Aerosp. Sci. Technol. 2021, 112, 106616. [Google Scholar] [CrossRef]
- Huang, S.; Yang, Y. Adaptive neural-network-based nonsingular fast terminal sliding mode control for a quadrotor with dynamic uncertainty. Drones 2022, 6, 206. [Google Scholar] [CrossRef]
- Mo, H.; Farid, G. Nonlinear and adaptive intelligent control techniques for quadrotor uav—A survey. Asian J. Control 2019, 21, 989–1008. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Meaning |
|---|---|---|
| m | 0.56 kg | the mass of the quadrotor |
| g | 9.8 | gravitational acceleration |
| d | 0.3 m | distance between the center of gravity and the rotation axis of one motor |
| moment of inertia about x-axis | ||
| moment of inertia about x-axis | ||
| moment of inertia about x-axis | ||
| force coefficient during one motor rotation | ||
| torque coefficient during one motor rotation | ||
| drag coefficient due to air resistance | ||
| drag torque coefficient due to air resistance |
| Parameter | Value |
|---|---|
| 0.01 | |
| 4.25 | |
| 2.5 | |
| 28.5, 50, 28.5 | |
| 6, 6, 12 | |
| 3 | |
| 2.5 | |
| 1.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, S.; Wang, J.; Hua, Y.; Zhuang, Y.; Yu, X. Trajectory-Tracking Control for Quadrotors Using an Adaptive Integral Terminal Sliding Mode under External Disturbances. Drones 2024, 8, 67. https://doi.org/10.3390/drones8020067
Jiao S, Wang J, Hua Y, Zhuang Y, Yu X. Trajectory-Tracking Control for Quadrotors Using an Adaptive Integral Terminal Sliding Mode under External Disturbances. Drones. 2024; 8(2):67. https://doi.org/10.3390/drones8020067
Chicago/Turabian StyleJiao, Shipeng, Jun Wang, Yuchen Hua, Ye Zhuang, and Xuetian Yu. 2024. "Trajectory-Tracking Control for Quadrotors Using an Adaptive Integral Terminal Sliding Mode under External Disturbances" Drones 8, no. 2: 67. https://doi.org/10.3390/drones8020067
APA StyleJiao, S., Wang, J., Hua, Y., Zhuang, Y., & Yu, X. (2024). Trajectory-Tracking Control for Quadrotors Using an Adaptive Integral Terminal Sliding Mode under External Disturbances. Drones, 8(2), 67. https://doi.org/10.3390/drones8020067