1. Introduction
In recent years, drones have garnered increasing attention, with their applications expanding significantly across both civilian and military domains. In the civilian sector, they are frequently employed for tourism photography [
1], formation flight performances [
2,
3], air quality monitoring [
4], forest fire surveillance [
5], remote sensing imagery for precision agriculture [
6], and other civilian applications. In the military realm, drones serve as military relay networks [
7] and are also utilized in swarming combat systems [
8]. The role of UAVs is becoming increasingly prominent. Compared to fixed-wing UAVs, the primary advantage of rotorcraft is their ability to vertically take off and land in confined spaces, as well as hover at designated target locations. This is complemented by benefits such as a simple structure, affordable cost, and flexible operational control.
The quadrotor UAV is a complex, nonlinear, and strongly coupled system with multiple inputs and outputs. Specifically, the vehicle achieves pitch and roll motions by controlling the increase or decrease in the rotational speeds of its four rotors, and yaw motion by altering the speed differential between pairs of rotors. The simultaneous realization of attitude and position control during flight poses a significant challenge in the design of its control system.
The earliest method for trajectory tracking control of quadrotors was PID control [
9], which is most widely used in the industrial field. Subsequently, LQR control [
10] and sliding mode control [
11] emerged. Later on, back-stepping control [
12], widely applied in the field of algorithms, appeared, followed by dynamic surface control [
13] based on the back-stepping method. Currently, the most popular control algorithms include fuzzy control [
14], neural network control [
15], and adaptive control [
16], etc., and the issues considered are response speed, interference immunity, internal model uncertainty, dynamic compensation, overshooting amount, tracking accuracy, and so on.
Numerous control algorithms have been employed for trajectory tracking of quadrotor UAVs. The most common control algorithm is PID control, introduced by Javier et al. [
17] as a control algorithm for quadrotor UAVs. However, the simplicity and poor robustness of PID control, along with its slow response, limit its widespread application in the field of quadrotor UAVs. Besnard et al. [
18] introduced a sliding mode control algorithm to quadrotor systems, which is advantageous for its insensitivity to model errors, parameter uncertainties, and other disturbances, but the chattering problem is challenging to address. Almakhles et al. [
19] introduced a back-stepping control algorithm, which is suitable for systems with a strict feedback control structure. Due to the requirement of prior knowledge of the system model for back-stepping control, model errors significantly impact the control precision. To enhance steady-state performance, Razmi et al. [
20] introduced a neural network control algorithm for attitude control, which also exhibits excellent disturbance immunity. Similarly, to improve steady-state performance, Razmi et al. [
21] introduced an
nonlinear control algorithm, achieving zero steady-state error under continuous disturbances. Zhang et al. [
22] introduced fuzzy control to overcome the underactuation and strong coupling issues of quadrotor UAVs; however, fuzzy processing may lead to reduced control precision of the system, and controller design often relies on empirical verification, lacking theoretical methods for guidance. Cohen et al. [
23] introduced LQR control, which linearizes the model but loses the nonlinear characteristics of the model, reducing the robustness of the control system. However, none of the aforementioned articles address the issue of actuator input saturation, and their effectiveness in reducing unknown external disturbances is limited. Therefore, the design goal of this paper is to develop a controller with disturbance rejection capability that can solve the actuator input saturation problem.
The control scheme proposed in this paper is referenced from [
24], where Chen et al. discussed the actuator saturation problem during the re-entry phase of moving mass hypersonic vehicles (HSVs). The saturation nonlinearity was modeled using a hyperbolic tangent function, and the accompanying time-varying coefficients were addressed using the Nussbaum gain technique. A Nussbaum gain adaptable controller was constructed to overcome the actuator saturation problem, based on a disturbance observer, which enhances the disturbance resistance of the controller. Additionally, the dynamic surface technique was introduced to effectively counteract the differential explosion phenomenon. The reference literature also introduces a saturation function represented by the hyperbolic tangent function [
25] to model the nonlinearity of saturation, thereby obtaining a continuously differentiable form of the saturation model. However, the Nussbaum gain technique is rarely used in UAVs. To incorporate the Nussbaum gain technique into UAVs, this paper introduces a saturation function in conjunction with the Nussbaum function to address the input saturation [
26] problem of the actuator.
In light of the preceding discussions, this paper presents an adaptive anti-jamming control strategy for a class of quadrotor UAVs that are subject to input saturation and unknown disturbances. The Nussbaum gain technique is employed to tackle the challenge of system coefficients that are not predetermined. The distinctive features of the proposed control scheme are as follows:
- (1)
To address the system uncertainties and the aggregate of unknown external disturbances, a nonlinear disturbance observer is introduced, and the unknown disturbances can be tracked and compensate the controller, speeding up the convergence of the tracking.
- (2)
The Nussbaum gain technique is employed to address the time-varying system dynamics associated with the actuator saturation and system uncertainties. A Nussbaum gain-based adaptive controller is developed, which effectively mitigates the design challenges arising from these factors, achieving the desired control performance.
- (3)
By transforming six second-order systems into six third-order systems, the analytical solutions of the controller are converted into numerical solutions, thereby circumventing the complexity associated with traditional controller forms. This approach simplifies the controller design process and enhances the operational efficiency of the control system.
The subsequent sections of this paper are organized as follows:
Section 2 describes the modeling of the quadrotor UAV.
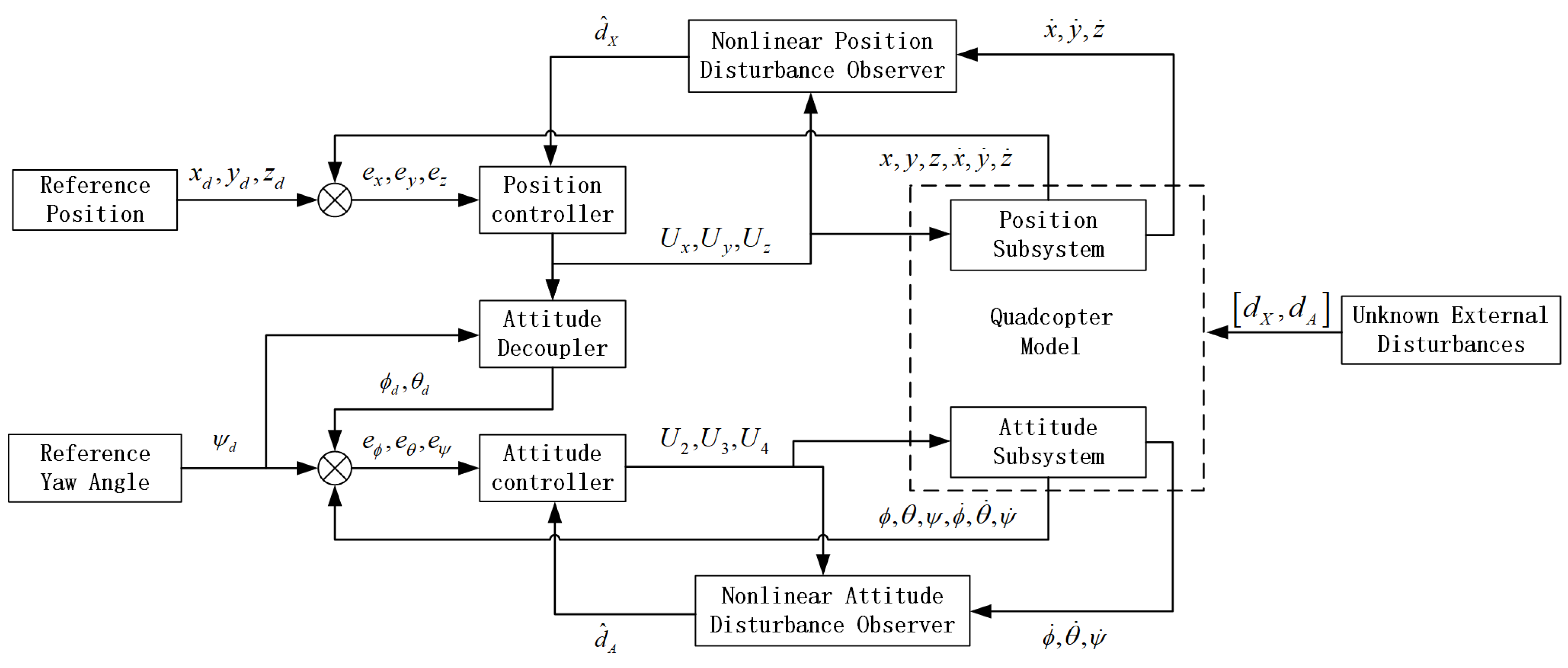
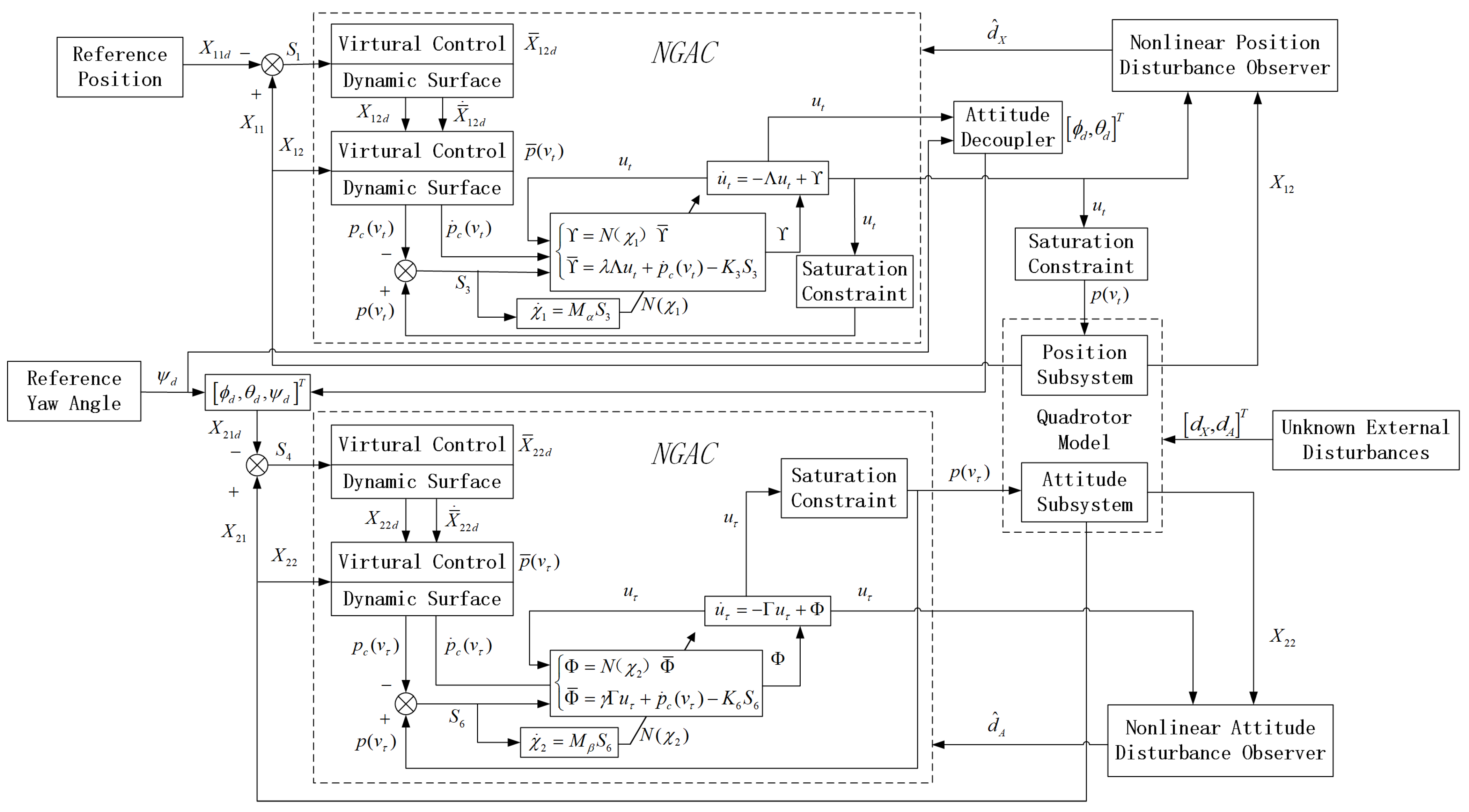
Section 3 outlines the design of the nonlinear disturbance observer and the controllers for position and attitude.
Section 4 provides a stability analysis of the proposed controller.
Section 5 presents the simulation results and analysis, and finally,
Section 6 concludes with some remarks on the findings.
2. Materials and Methods
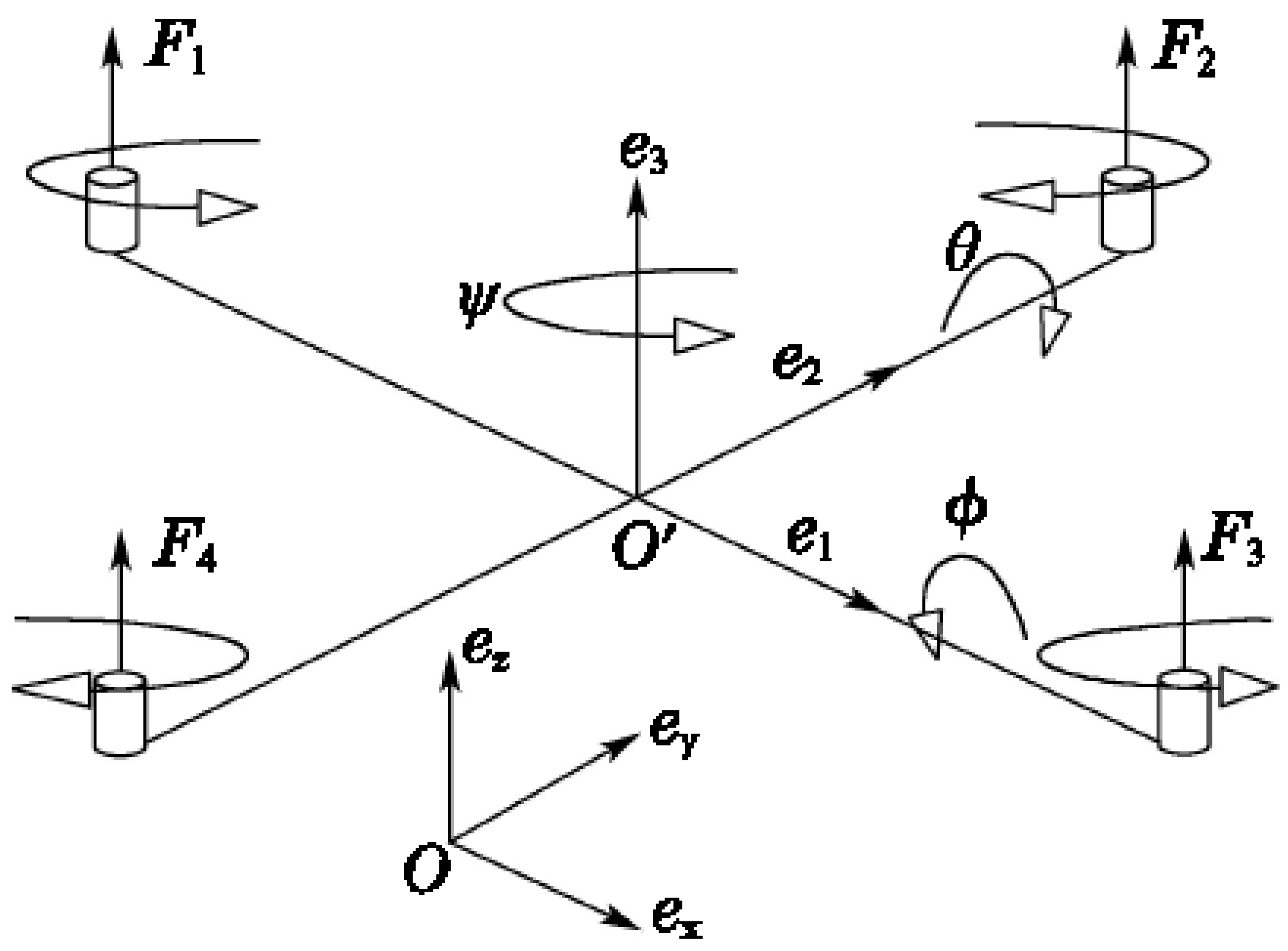
As depicted in
Figure 1, disregarding the Earth’s rotation, a specific location on the Earth’s surface is chosen as the origin to establish an inertial coordinate system
. The center of the starting bracket
O is selected as the reference point, and the geometric center of the airframe is taken as the origin to define the airframe coordinate system
. The transformation from the airframe coordinate system to the inertial coordinate system can be achieved through coordinate system rotation. The position vector
of the quadrotor is defined within the inertial coordinate system, whereas the attitude vector
, composed of roll, pitch, and yaw angles, is defined under the airframe coordinate system. The dynamic model of the quadrotor is decoupled into two subsystems: position and attitude.
The position dynamic subsystem is described as
where
is the vehicle position vector,
is the linear velocity vector of the vehicle in the inertial coordinate system,
is a space vector in the inertial coordinate system,
g is the acceleration due to gravity, and
represent external unknown disturbances of the position subsystem. The
denote the control quantities in the
directions,
represent the internal uncertain disturbance, and
and
can be expressed as
where
is the air-damping coefficient,
m is the mass of the quadrotor, and
is the total lift generated by the four rotors.
The attitude dynamic subsystem is described as follows
where
is the vehicle angle vector,
is the vehicle angular velocity vector in the inertial coordinate system, and
is the airframe input moment vector, which represents the torques of roll, pitch, and yaw angles.
is an unknown external disturbance, and
,
, and
can be described as
where
are the corresponding air resistance coefficients,
are the moment of inertia of the quadrotor in
X,
Y, and
Z axes, respectively, and
is the moment of inertia of the four rotors.
In summary, the dynamic model of a quadrotor [
27,
28] can be formulated as follows:
where
S and
C denote
and
, respectively,
are the internal parameters of the quadrotor system, the parameters are defined as:
For the purpose of subsequent controller design and stability analysis, the following assumptions and definitions are made here:
Assumption A1. The desired position and desired attitude are continuously derivable, and their derivatives exist and are bounded. The , ,, and exist. For the positive real numbers and , the inequalities and hold.
Definition 1. A function is called a Nussbaum-type function [29] if it has the following properties: The Nussbaum function chosen for this paper is .
Definition 2 ([
21])
. Assume S be a subset of , and then the set S is called an open subset of , if for every χ in the set S, there exists makes is a subset of S. A set S is called closed if and only if the complementary set of S in is open. If there exists makes holds for all , we call the set S bounded.Then, if and only if a set S is closed and bounded, we call the set S compact.
Definition 3 ([
30])
. For the system , where is piecewise continuous in t and locally Lipschitz in χ on , and is a domain, which contains the origin. If , there is , which makesThen the system is semiglobal stable.
Lemma 1 ([
24])
. Let V(·) and χ(·) be smooth functions defined on with , . For , if the following inequality holds:where the constant , is a time-varying parameter which takes a value in the intervals , and denotes some appropriate positive constant, then and must be bounded on . In this paper, the control goal is to design an adaptive trajectory tracking strategy, given any desired trajectory and yaw angle that satisfy Assumption 1, combined with the dynamic surface control technique, enabling the quadrotor to track the given desired trajectory and ensuring the closed-loop system is stable and linear as well as the boundedness of the system state signals.
4. Stability Analysis
In this section, a stability analysis is conducted on the provided control scheme to ensure that all signals in both the position and attitude subsystems are ultimately bounded.
From (
15), (
16), (
18), and (
20), we have
Invoking (
21), (
22), (
24), and (
26) to obtain
Combine (
27) and (
28) to obtain
Calling formulas (
36), (
37), (
39), and (
41) can gain
Refer to Equation (
42) and consider (
43), (
45), and (
47) to obtain
Based on (
48) and (
49), we have
Differentiating
in (
18) and using (
16), (
19), and (
51), this yields
where
is a function of
and has the following form:
Differentiating
in (
24) and using (
22), (
25), and (
52), we have
where
is a function of
and has the following form:
Differentiating
in (
39) and using (
37), (
40), and (
54), we can obtain
where
is a function of
and has the following form:
Differentiating
in (
45), and using (
43), (
46), and (
55), we obtain
where
is a function of
and has the following form:
The Lyapunov function for the entire system is constructed as follows:
where
and
are the Lyapunov functions for the position subsystem, and similarly,
and
are the Lyapunov functions for the attitude subsystem, represented as follows:
Theorem 1. Consider a closed-loop system expanded by position subsystem (13) and attitude subsystem (34). The semi-global stability of the closed-loop system is ensured with appropriate design parameters with the initial condition holding, the error of position tracking and the error of attitude tracking converging with arbitrarily small errors, and the control inputs, states, and all closed-loop system signals being bounded. Proof. Based on (
51)–(
53) and (
66), differentiating
yields
In a similar way, from (
54)–(
56) and (
68), to take the derivative of
where
denotes the smallest eigenvalue of
. Define a collection:
From Definition 2 and Assumption 1, one has that
is a compact set on
. Consider two compact sets:
Therefore,
is a compact set on
and
is a compact set on
. Furthermore,
are bounded on
and
, respectively. Then, there must exist positive constants
that satisfy
. Then, define another collection:
From Definition 2 and Assumption 1, one has that
is a compact set on
. Consider two compact sets:
Therefore, is a compact set on and is a compact set on . Furthermore, are bounded on and , respectively. Then, there must exist positive constants that satisfy .
Invoking (
57), (
59), and (
67) to derive
:
Similarly, from (
61), (
63), and (
69) to derive
:
where
denotes the smallest eigenvalue of
. According to Young’s inequality and Theorem 1, the following time derivative can be obtained:
where
, and
.
For the stability of the closed-loop system, the relevant design parameters and should be chosen to make sure that , , .
Invoking (
28), (
49) and noting that:
From Lemma 1, we know and are bounded on .
From the initial condition
and (
81), we can obtain that
V is bounded on
and guarantees semi-global stability. Therefore,
,
is bounded. In addition, the closed-loop system signal
,
and the control input
are bounded.
Define:
, and
For integrating both sides of the inequality (
80), one obtains:
Considering the inequalities on
, i.e.,
and
. Let
, from (
81) we can have:
Noting that
, and substituting (
85) into (
84) yields:
Then, the tracking errors of position and attitude are bounded and converge to arbitrarily small errors with suitable parameters. This is the end of the proof. □
5. Experimental Verification
In this section, the controllers designed above are validated.
Section 5.1 presents the experimental platform related to the experiments,
Section 5.2 displays the relevant parameters and initial states of the quadrotor for the semi-physical simulation experiments,
Section 5.3 conducts experiments with the designed controllers and compares them with other controllers, and
Section 5.4 shows the error analysis of the three controllers from
Section 5.3.
5.1. Modeling Tech Experimental Platform
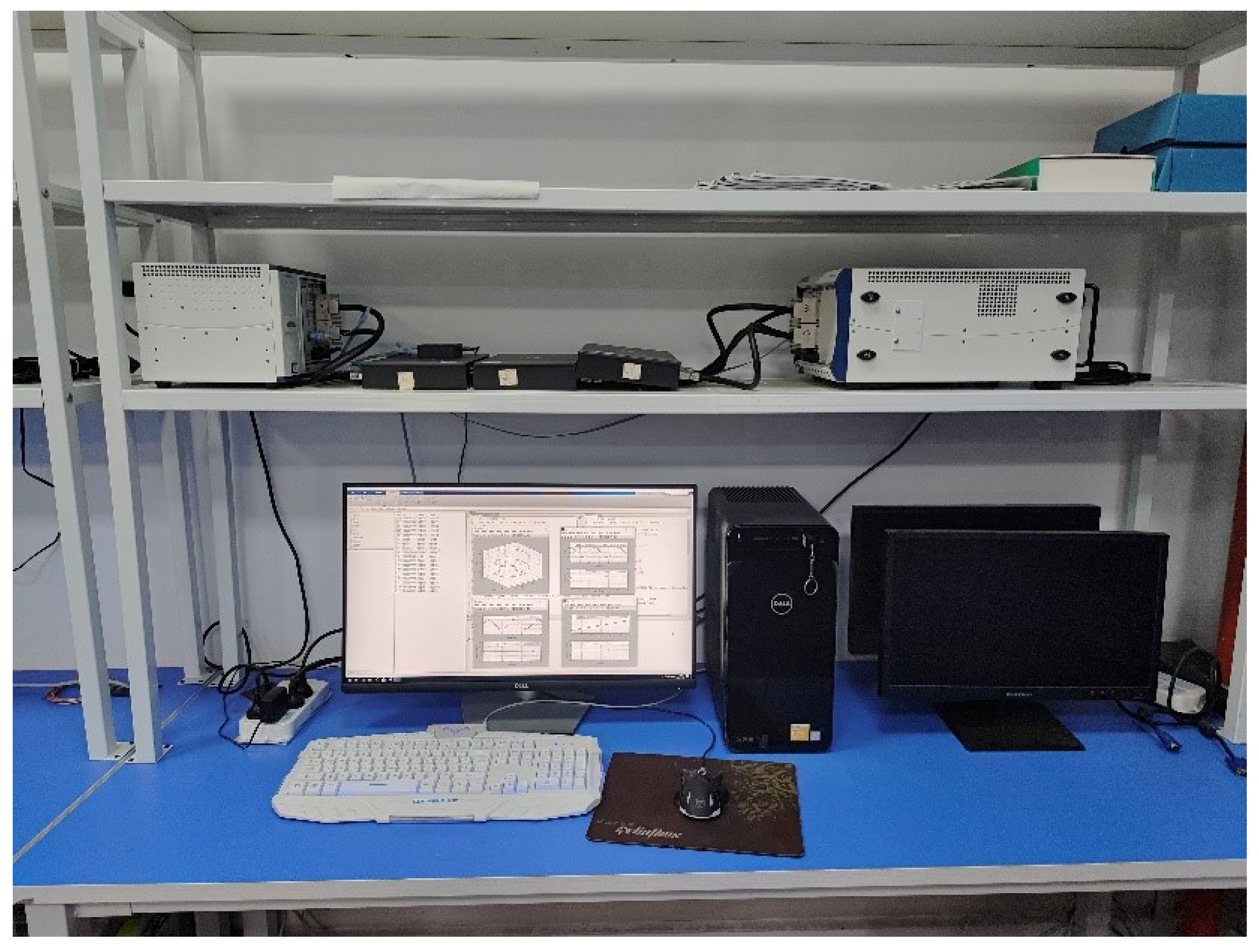
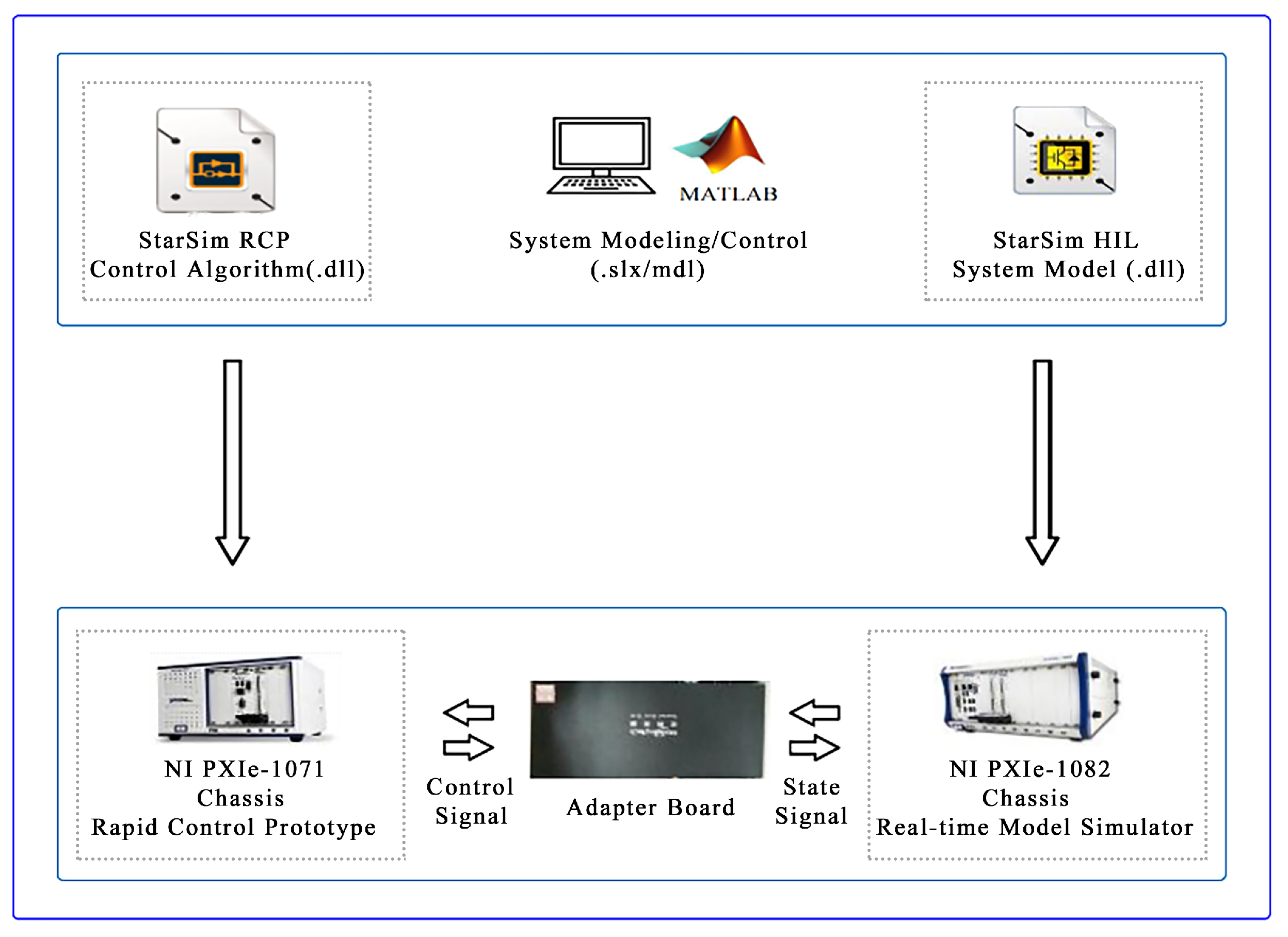
Through the StarSim Modeling Tech semi-physical simulation experiments of the traditional dynamic surface control (DSC), adaptive dynamic surface control based on the Nussbaum function (NGAC), and the control scheme of this paper (NGACDOB) are carried out by the real-time simulation experimental platform of power electronics. The hardware structure of the experimental platform is shown in
Figure 4 and
Figure 5.
The simulation results of the NGACDOB controller are shown as follows.
Experimental environment: (1) NI PXIe-1071, MTRCP (Rapid Control Prototype), the equipment adopts Kintex-7 325 T FPGA@Xilinx, and it has 16 analog input/output channels with a transmission rate of 1Ms/s. The device is used to run the proposed control algorithm in order to run the control code in real time and to run the control signals generated by the proposed control algorithm on the MT real-time simulator. (2) NIPXIe1082, the MT Real-Time Simulator (RTS) with a Kintex 7325T FPGA chip has 16-bit synchronous analog I/O channels and a data transfer rate of 1 MS/s. It is capable of performing FPGA simulations of large-scale power systems. The simulator receives the control signals, calculates the real-time response through the power electronics system, and outputs it to the control box. The RTS, RCP, and signal adapter form a closed-loop experimental system. (3) Experimental adapter board: used to connect signals between the control device and the model device. (4) Host: Matlab/Simulink system model and controller algorithms are downloaded to the Rapid Control Prototype and Real-Time Simulator, respectively, via Star SIM RCP software.
Remark 1. It should be noted that the experimental validation in this paper is conducted on a semi-physical simulation platform, which is a real-time simulation technology that combines physical hardware with simulation software. This simulation method integrates physical components into the simulation loop of the system, allowing for a comprehensive examination and verification of system performance. The core feature of this method is embedding physical components into the simulation loop and requiring real-time operation, which solves the interface issues between the controller and the simulation computer, making the experimental results more realistic than pure mathematical simulation. The Modeling Tech experimental platform shown in Figure 4 runs the controller program, whereas the hardware structure of the experimental platform shown in Figure 5 runs the model program, with communication between the model and controller facilitated by a relay board. We aim to validate the control algorithm proposed in this paper through this semi-physical simulation experiment, laying the groundwork for physical experiments on flight vehicles. 5.2. Experimental Preparation
In order to verify the effectiveness of the control scheme proposed in this paper, a quadrotor with external perturbations and model uncertainties is considered, and the nominal parameters are shown in
Table 1.
The initial position is set as () and the initial attitude angle is (). In order to accomplish the tracking target, the position controller parameters are selected as: , , . The attitude controller parameters are selected as: , . The reference trajectory of the quadrotor is and the desired yaw angle is . Disturbances were added to the position and attitude subsystems at the 18th second, the duration of the disturbances lasted 1 s, and both position and attitude disturbances were . Then, disturbances were added to the position and attitude subsystems at the 25th second, the duration of the disturbances lasted 1 s, and both position and attitude disturbances were .
5.3. Experimental Results
In this subsection, based on the experimental platform and the initial states and corresponding parameters of the model mentioned above, we will conduct three sets of experiments as follows: Experiment 1, Adaptive Dynamic Surface Control with Nussbaum Gain and Disturbance Observer (NGACDOB), Experiment 2, a comparative experiment between Traditional Dynamic Surface Control (DSC) and Adaptive Dynamic Surface Control with Nussbaum Gain and Disturbance Observer (NGACDOB), and Experiment 3, a comparative experiment between Adaptive Dynamic Surface Control based on Nussbaum Gain (NGAC) and Adaptive Dynamic Surface Control with Nussbaum Gain and Disturbance Observer (NGACDOB).
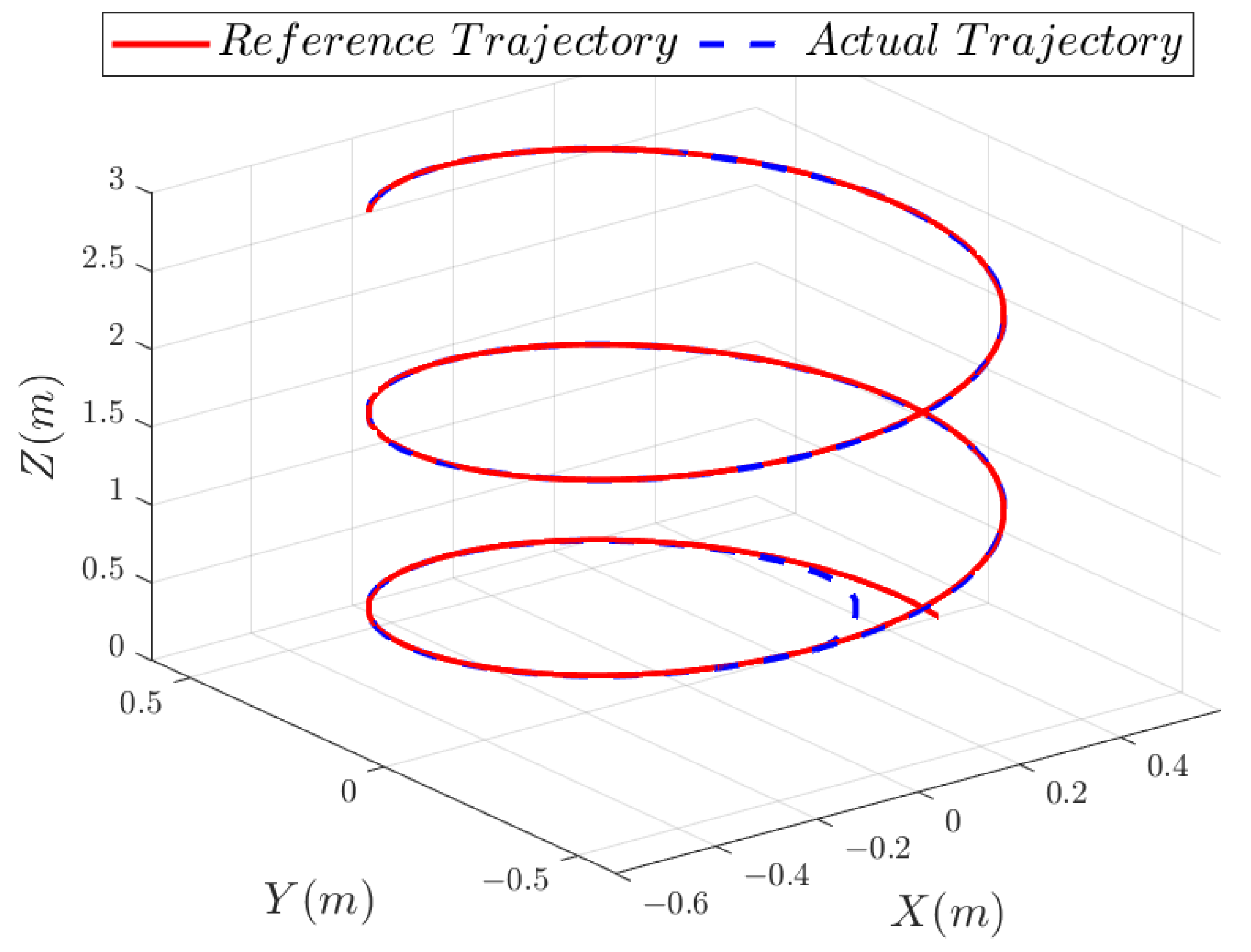
Experiment 1: The simulation results of NGACDOB
Figure 6 demonstrates the 3D tracking effect of the quadrotor, which follows a reference trajectory in the form of an ascending spiral during a 30 s simulation. It can be observed from the figure that the quadrotor is able to quickly track the reference trajectory.
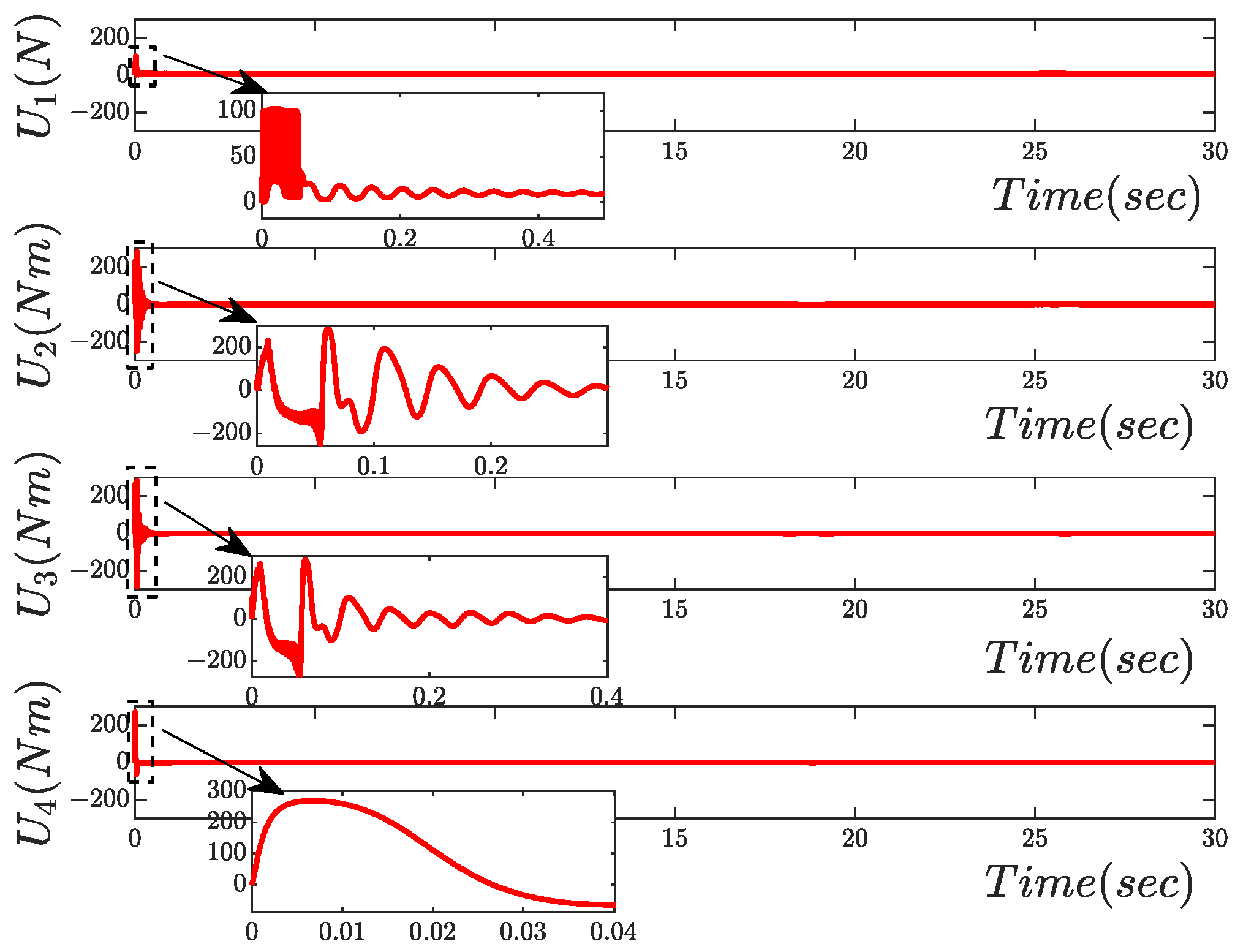
Figure 7 shows the changes in the input state of the quadrotor. Due to the introduction of input saturation in the controller design (Equations (
12) and (
33)), with the saturation values
and
both set to 300, the four input state values of the quadrotor are kept within 300 to prevent the input state values from being too high, which could result in the quadrotor’s actual lift and torque inputs from reaching the required conditions. The simulation results demonstrate the effectiveness of the input saturation control.
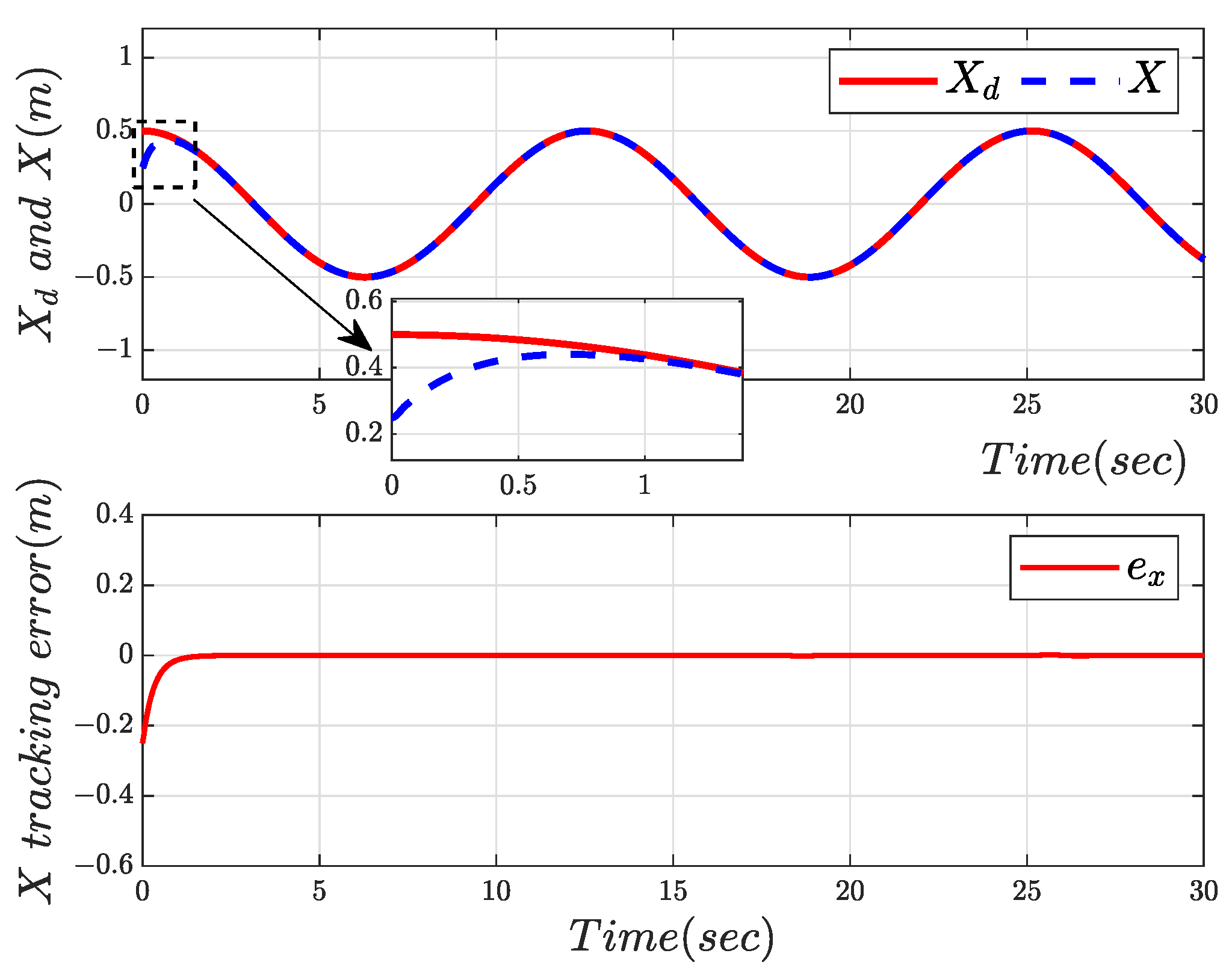
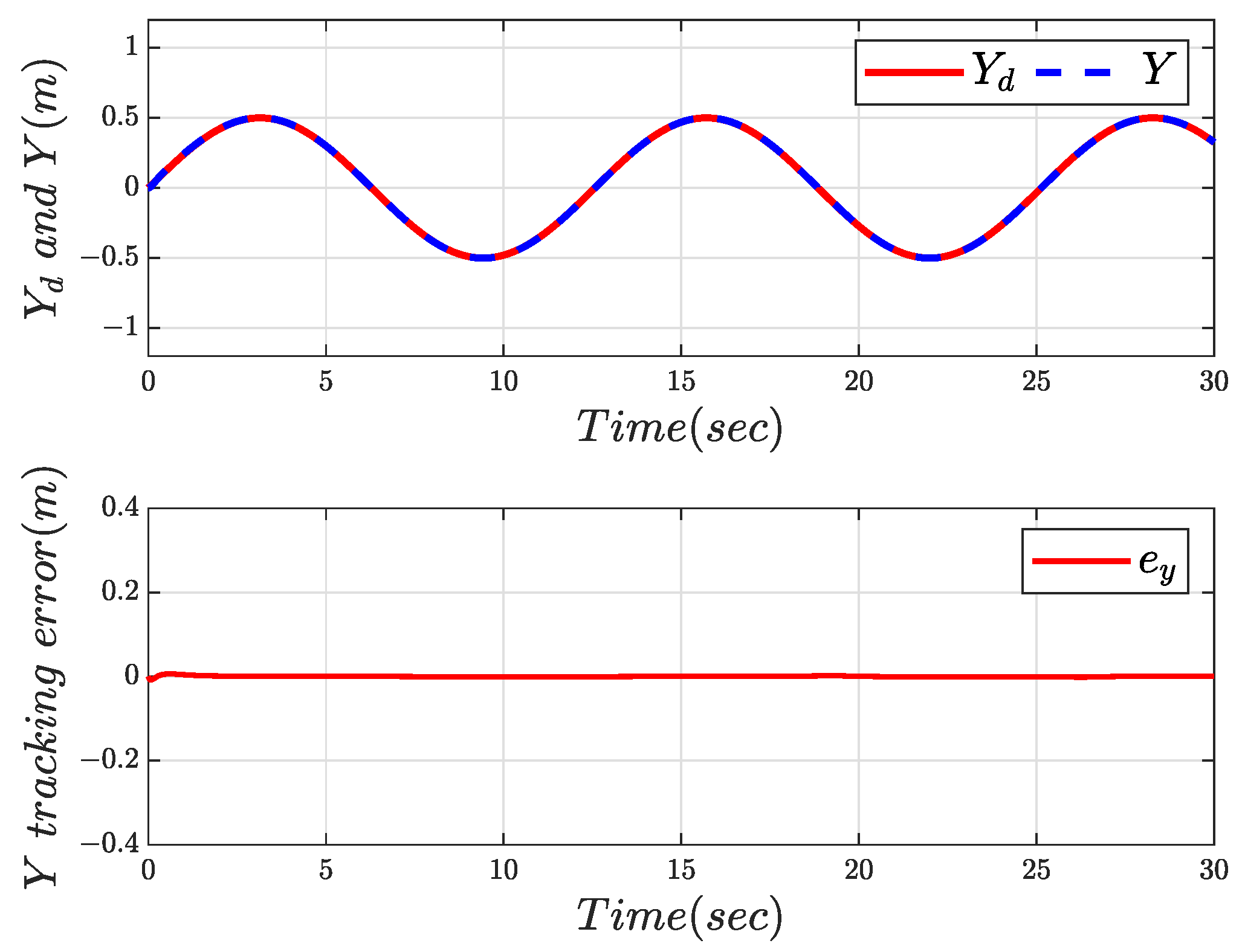
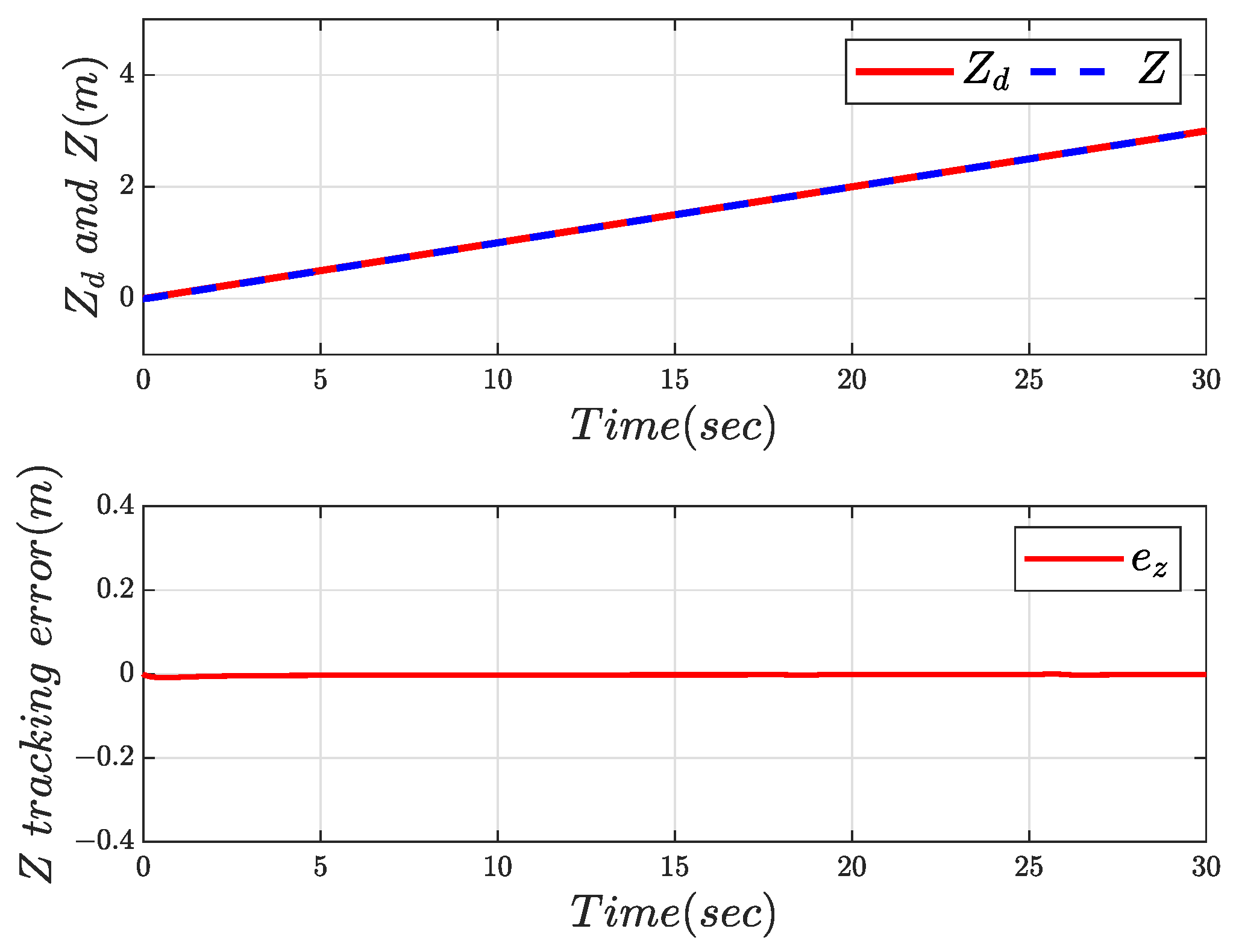
Figure 8,
Figure 9 and
Figure 10 show the tracking and errors of the quadrotor in the
X,
Y, and
Z directions. To be realistic, the actual starting point is aligned with the reference trajectory’s starting point on the same horizontal plane, with only the initial value in the
X direction being different;
Figure 8 indicates that the aircraft tracks the reference signal after 0.6 s, and the tracking signals in all three directions show minimal fluctuations after disturbances at the 18th and 25th seconds, reflecting the effectiveness of the control algorithm and its good disturbance rejection capability.
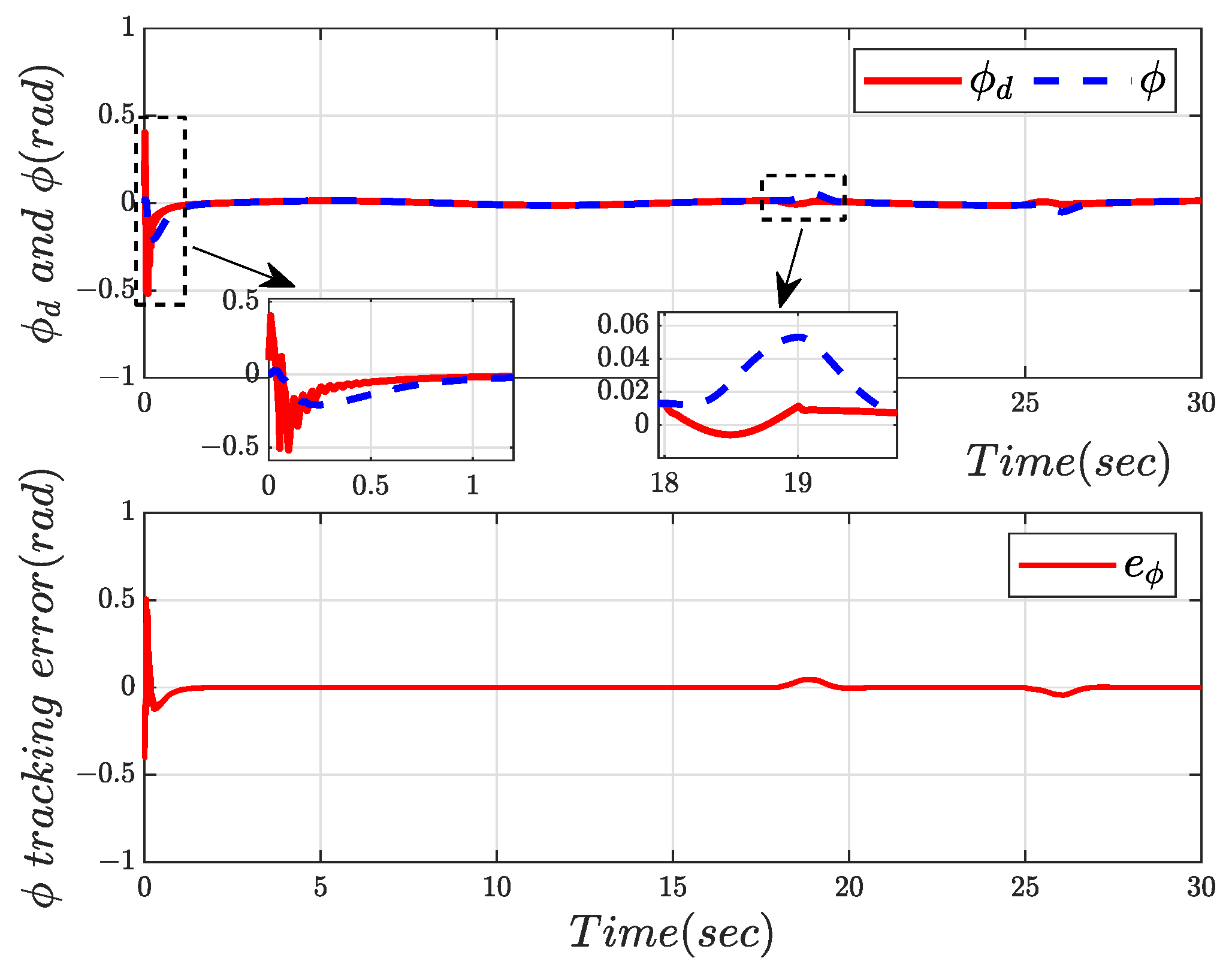
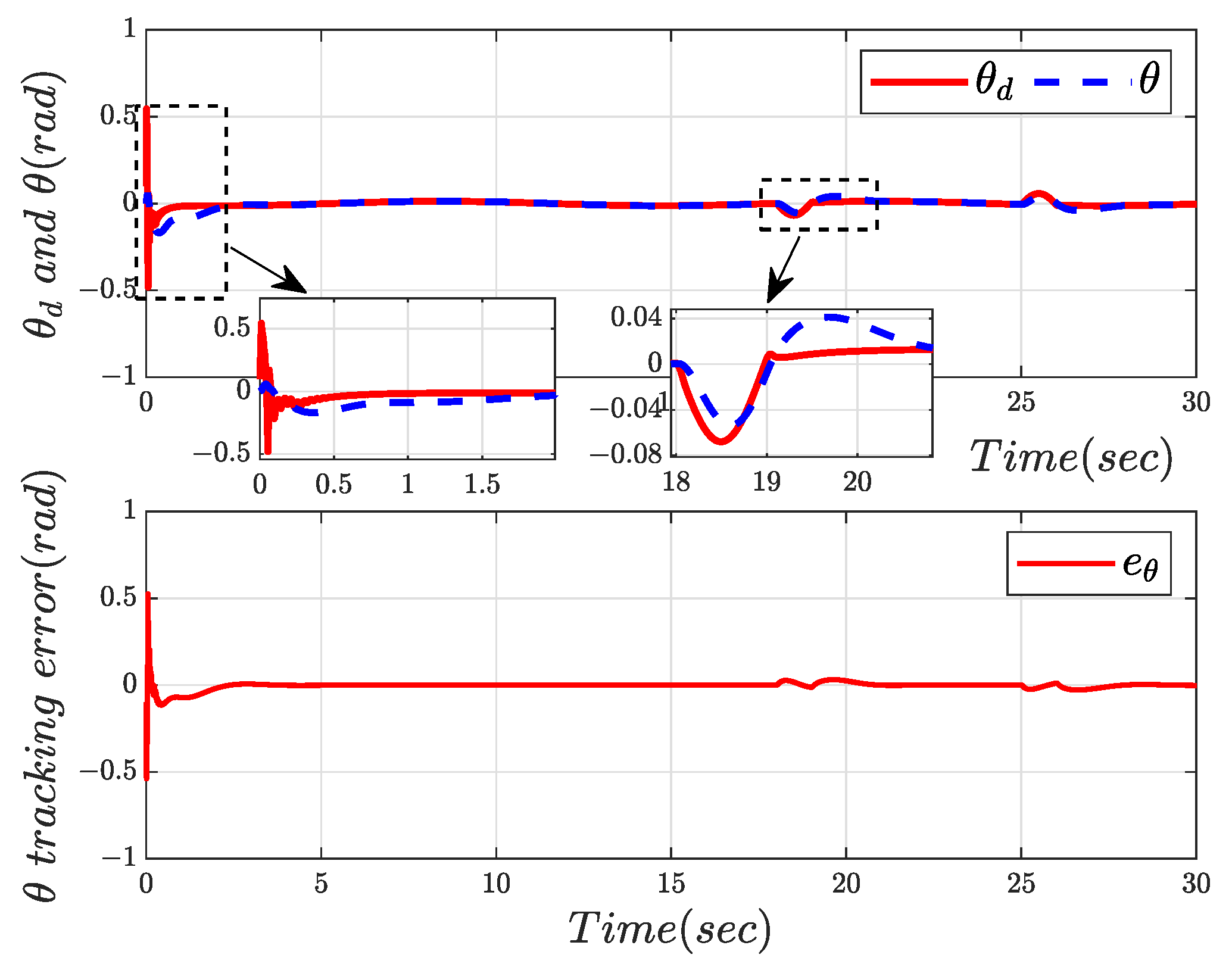
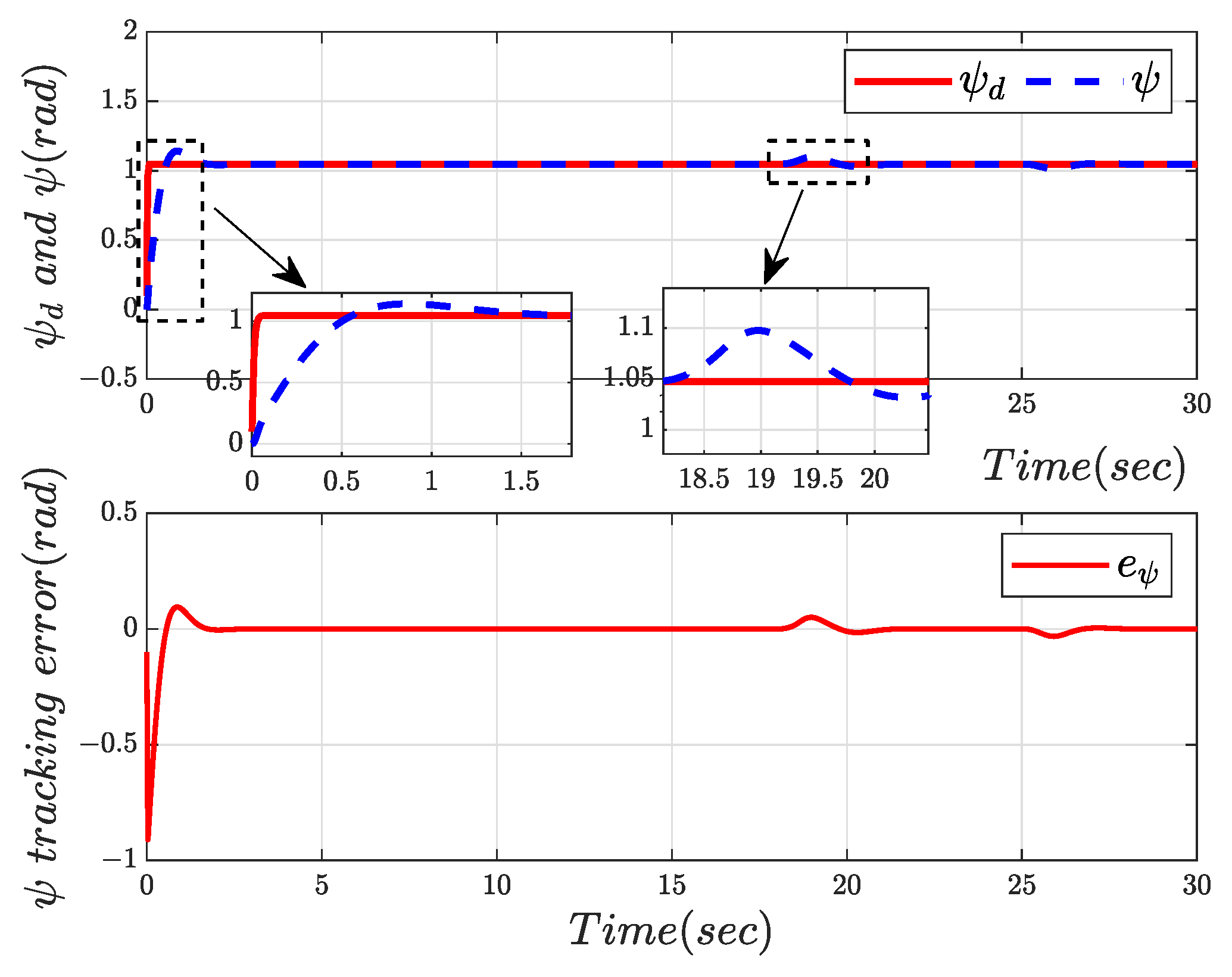
Figure 11,
Figure 12 and
Figure 13 show the tracking and errors of the quadrotor’s roll, pitch, and yaw angles. In practical applications, large fluctuations in the roll and pitch angles are not allowed. The maximum roll angle in
Figure 11 is less than 0.2 rad (approximately
), which is well within the permissible range. The maximum pitch and yaw angles in
Figure 12 and
Figure 13 are both less than 0.1 rad (approximately
), indicating very small oscillations in the
Y and
Z directions, and the deviations after disturbances at the 18th and 25th seconds are also very small (disturbance errors are within 0.1 rad).
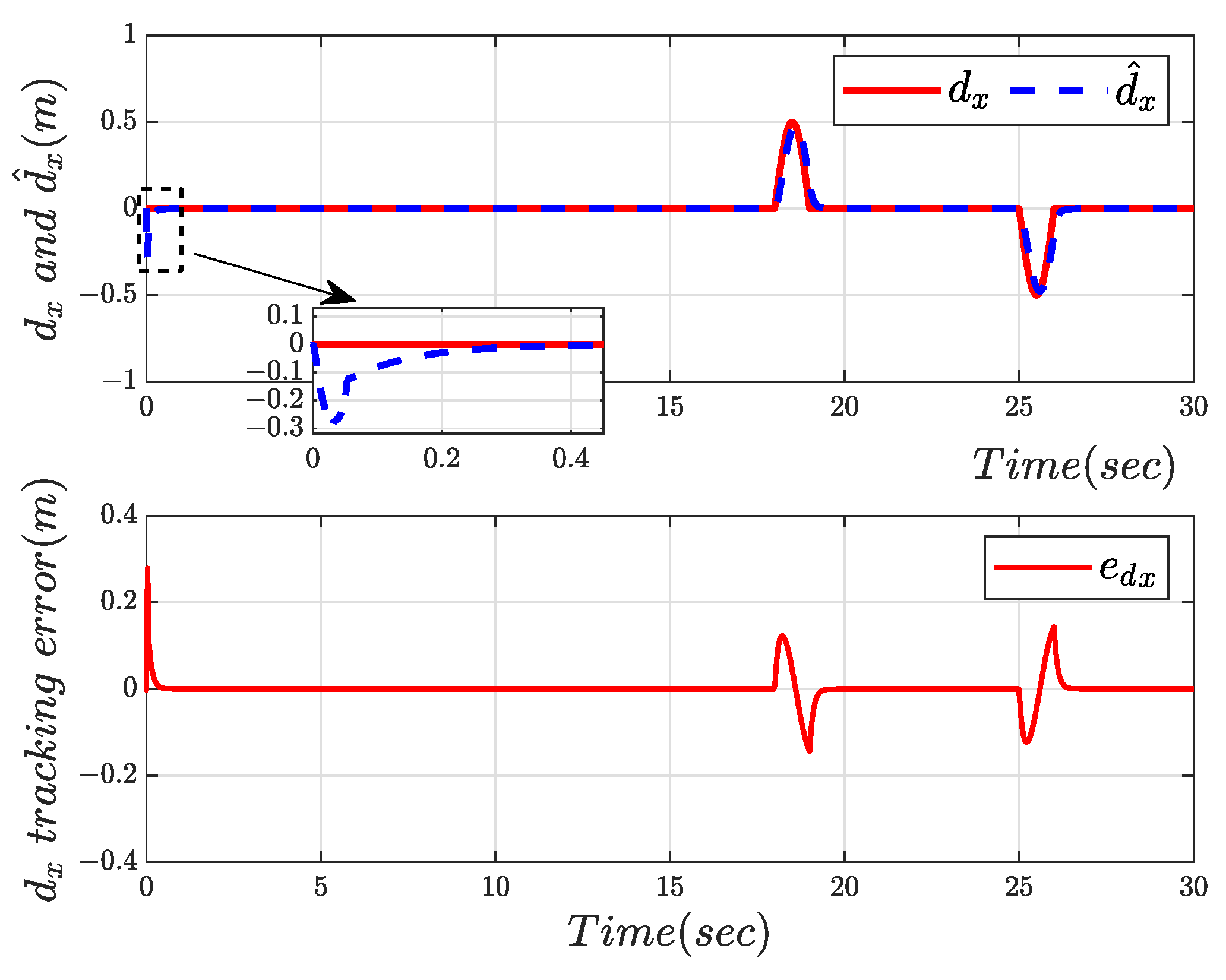
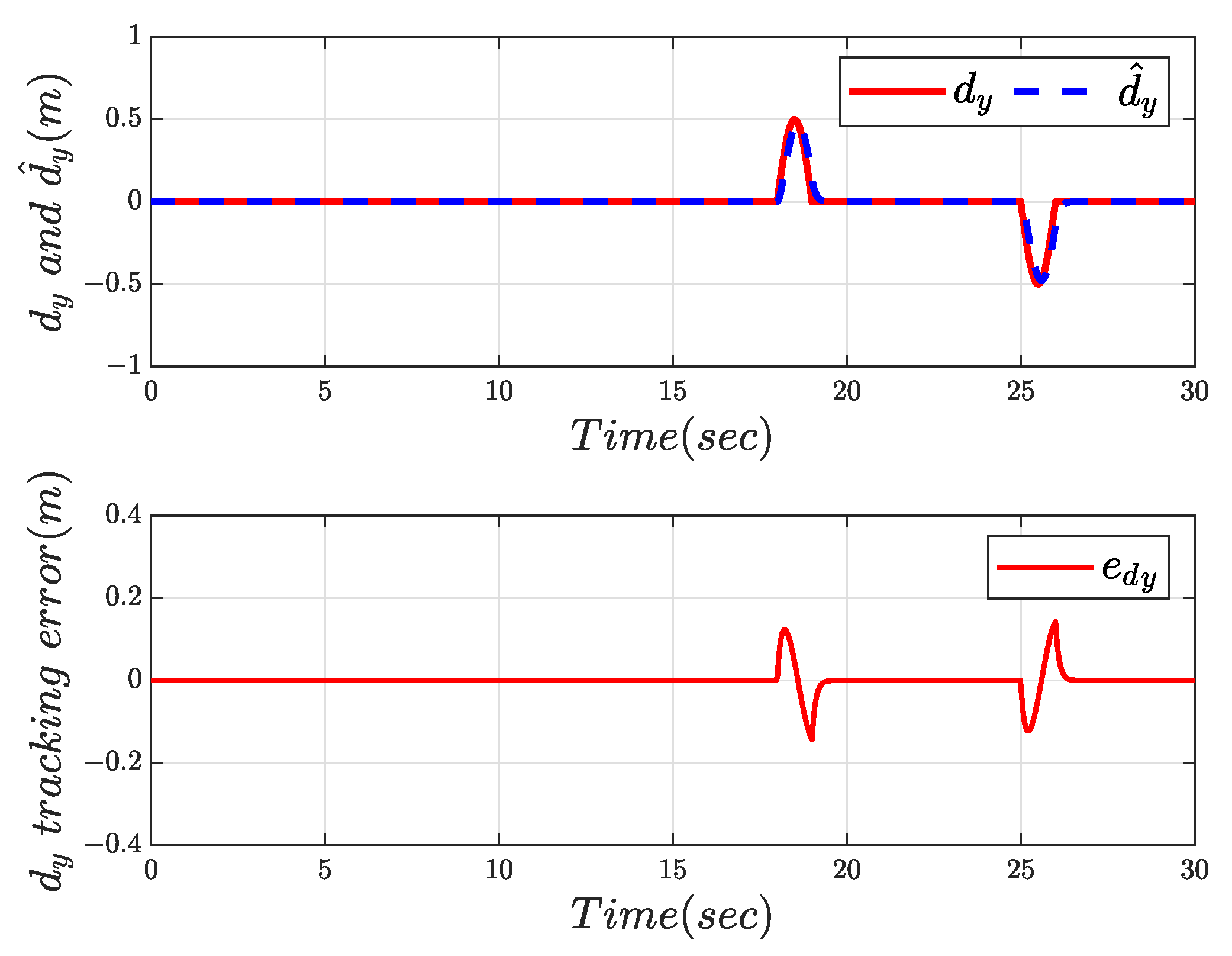
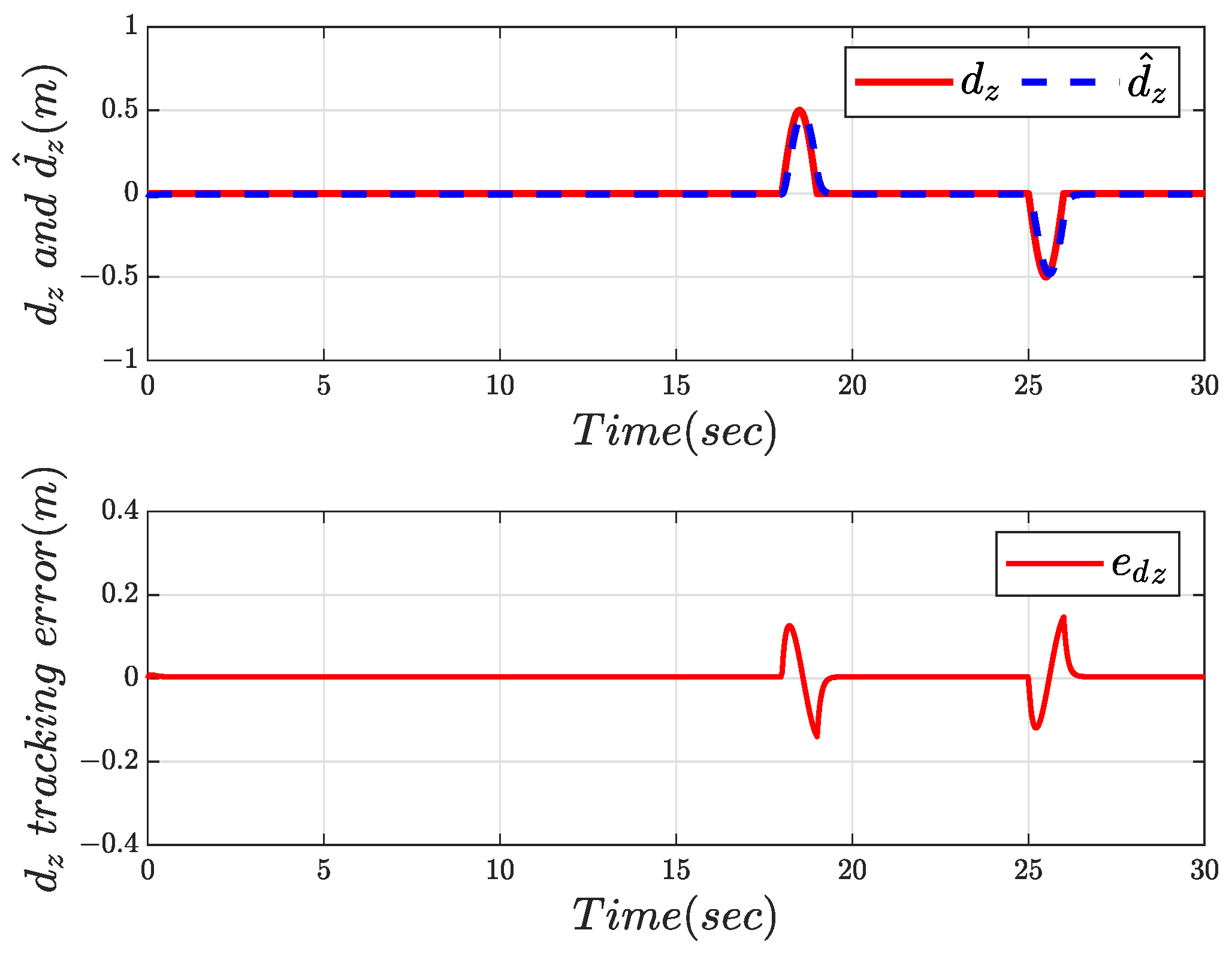
Figure 14,
Figure 15 and
Figure 16 show the tracking and errors of disturbances in the
X,
Y, and
Z directions. In
Figure 14, there is an overshoot of about 0.3 m in the
X direction during the initial 0.2 s. The
Y and
Z directions can track the external unknown disturbance signals well from the initial position, and the deviations after disturbances at the 18th and 25th seconds are also very small (tracking errors are within 0.1 m), indicating that the disturbance observer can effectively track external unknown disturbances.
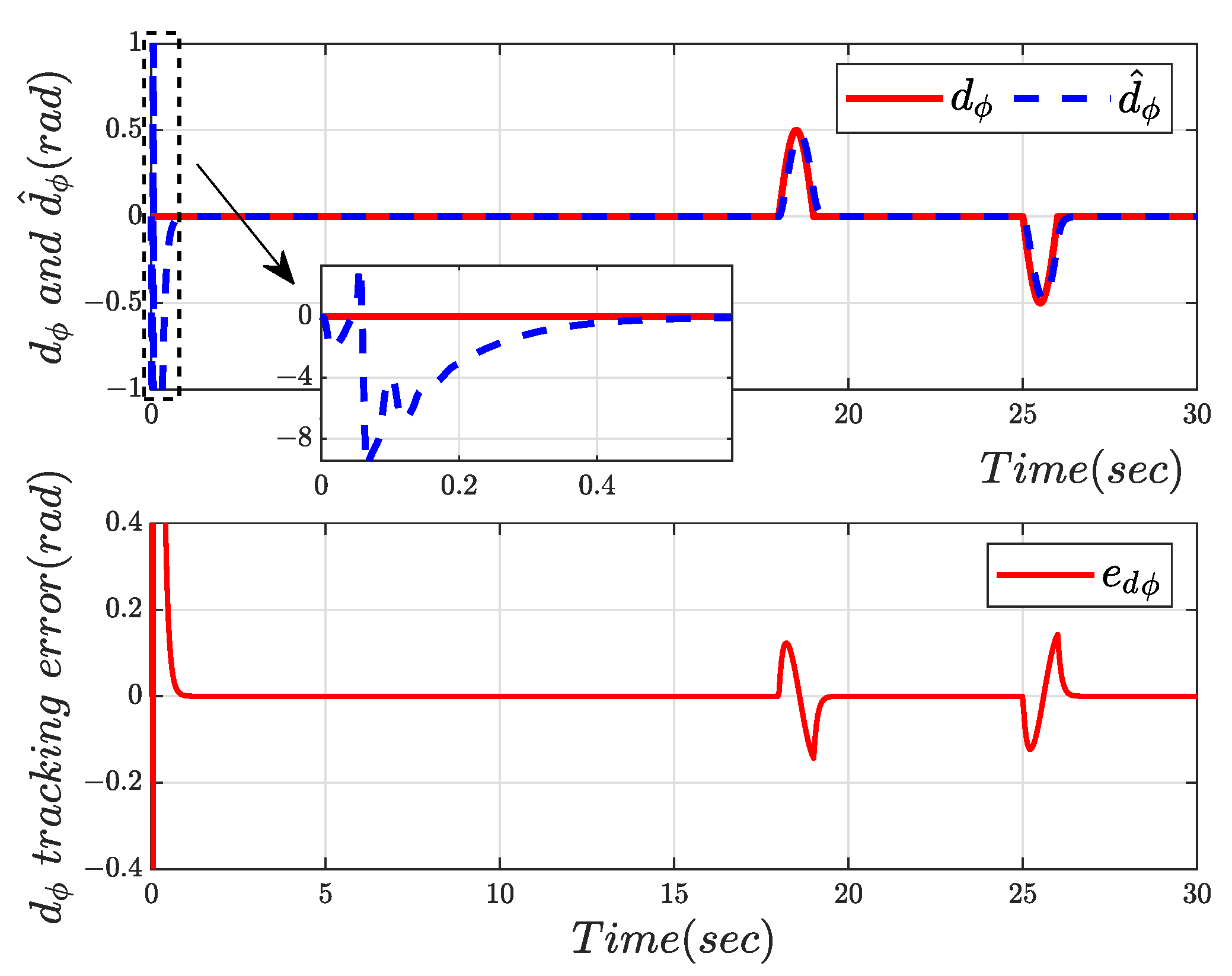
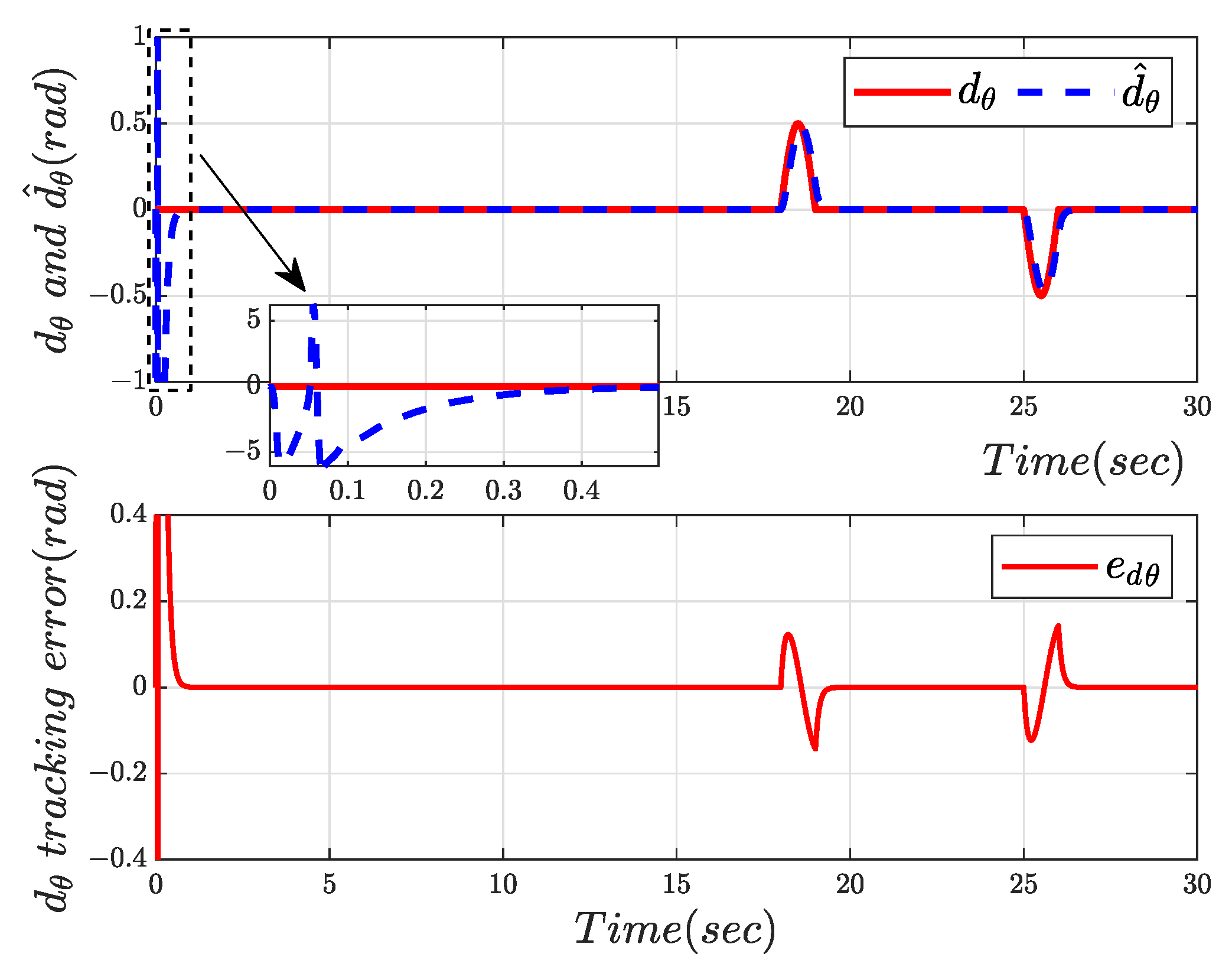
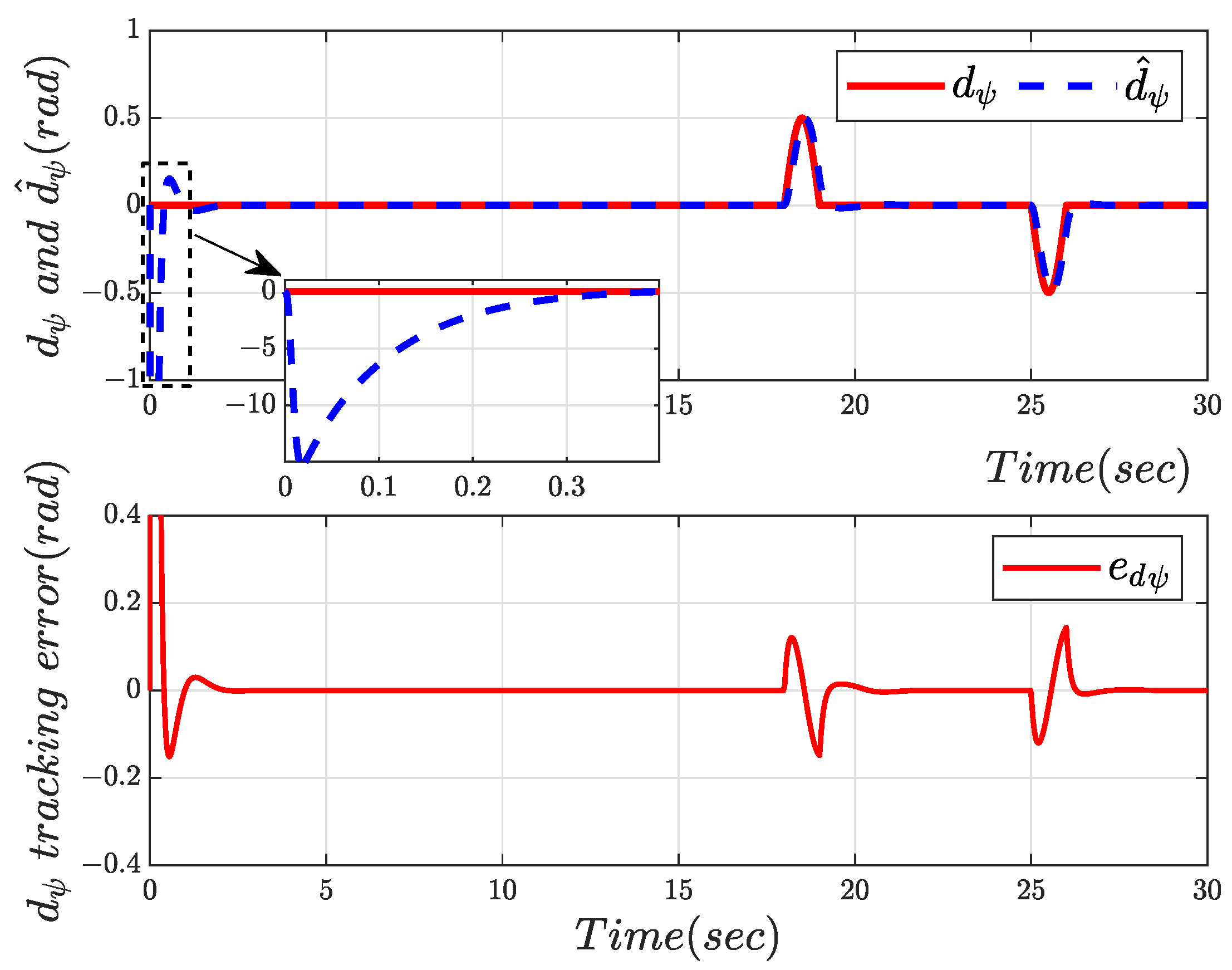
Figure 17,
Figure 18 and
Figure 19 show the tracking and errors of disturbances in the roll, pitch, and yaw angles. Due to the presence of the attitude decoupler, the desired angle changes are large and fast, leading to significant initial overshoot in the disturbance observers for the roll, pitch, and yaw angles. However, after 0.4 s, they all track the external unknown disturbance signals, and the deviations after disturbances at the 18th and 25th seconds are also very small (tracking errors are within 0.1 rad), fully demonstrating that the designed observer can effectively track external unknown disturbances.
Experiment 2: The simulation results of DSC vs. NGACDOB
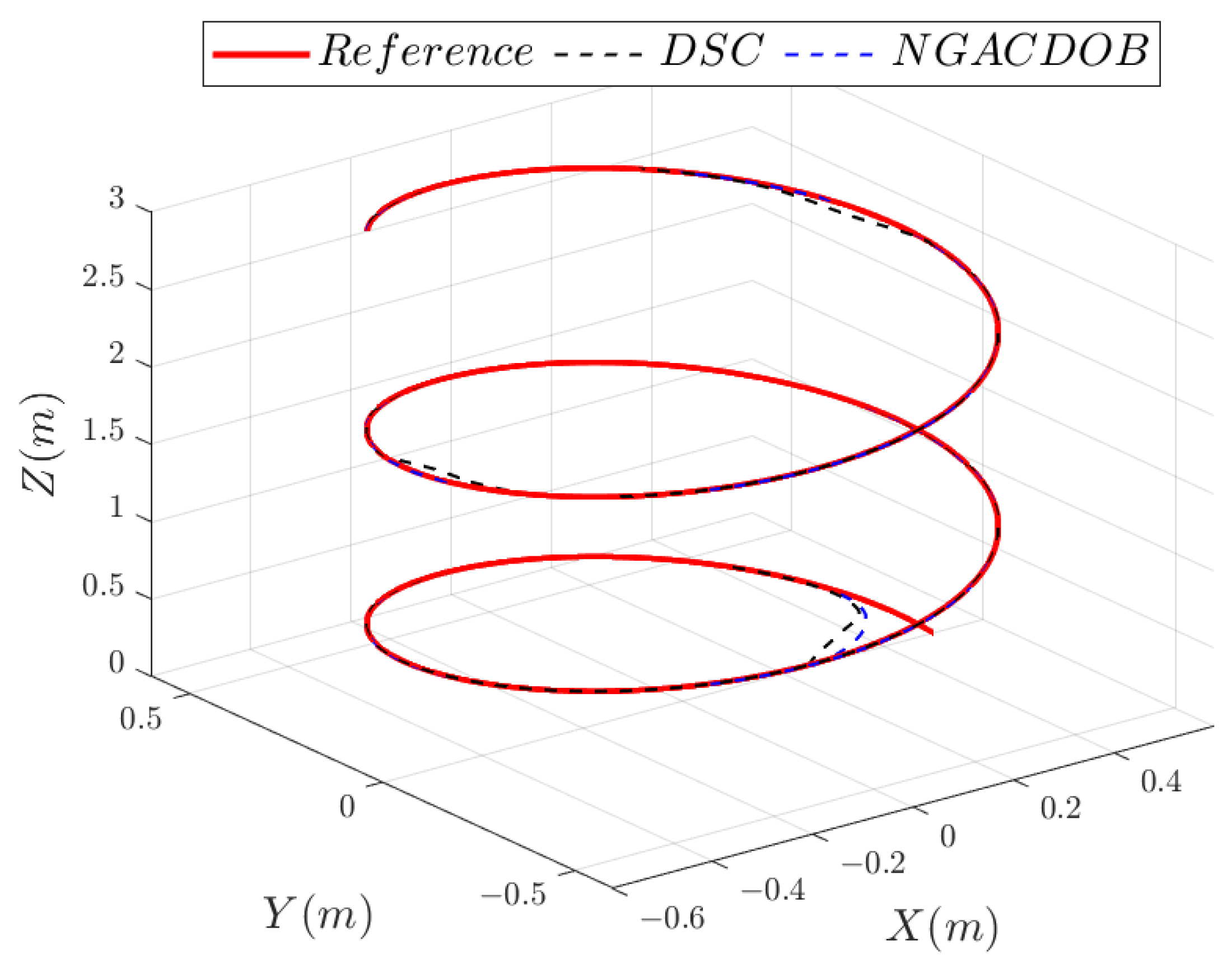
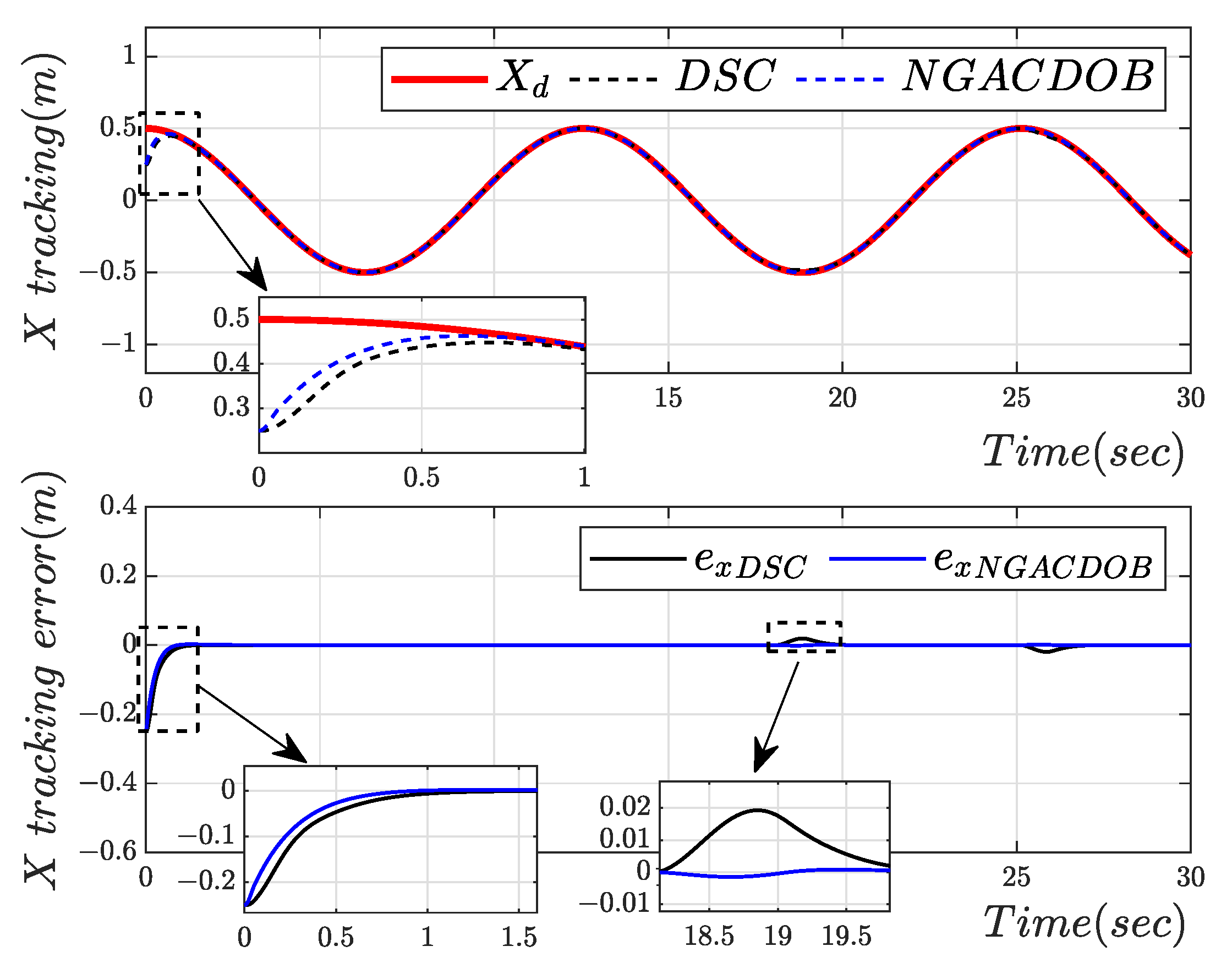
Figure 20 demonstrates the trajectory tracking performance of the DSC and NGACDOB controllers, where the blue line is able to track the red reference trajectory faster after the simulation starts, indicating that the NGACDOB controller has a faster response compared to the DSC controller. In
Figure 21, the NGACDOB controller exhibits a faster response after the simulation begins, reaching steady-state at 0.6 s. When subjected to unknown external disturbances at the 18th and 25th seconds, the DSC controller shows a significant deviation, suggesting that the NGACDOB controller has better disturbance rejection performance.
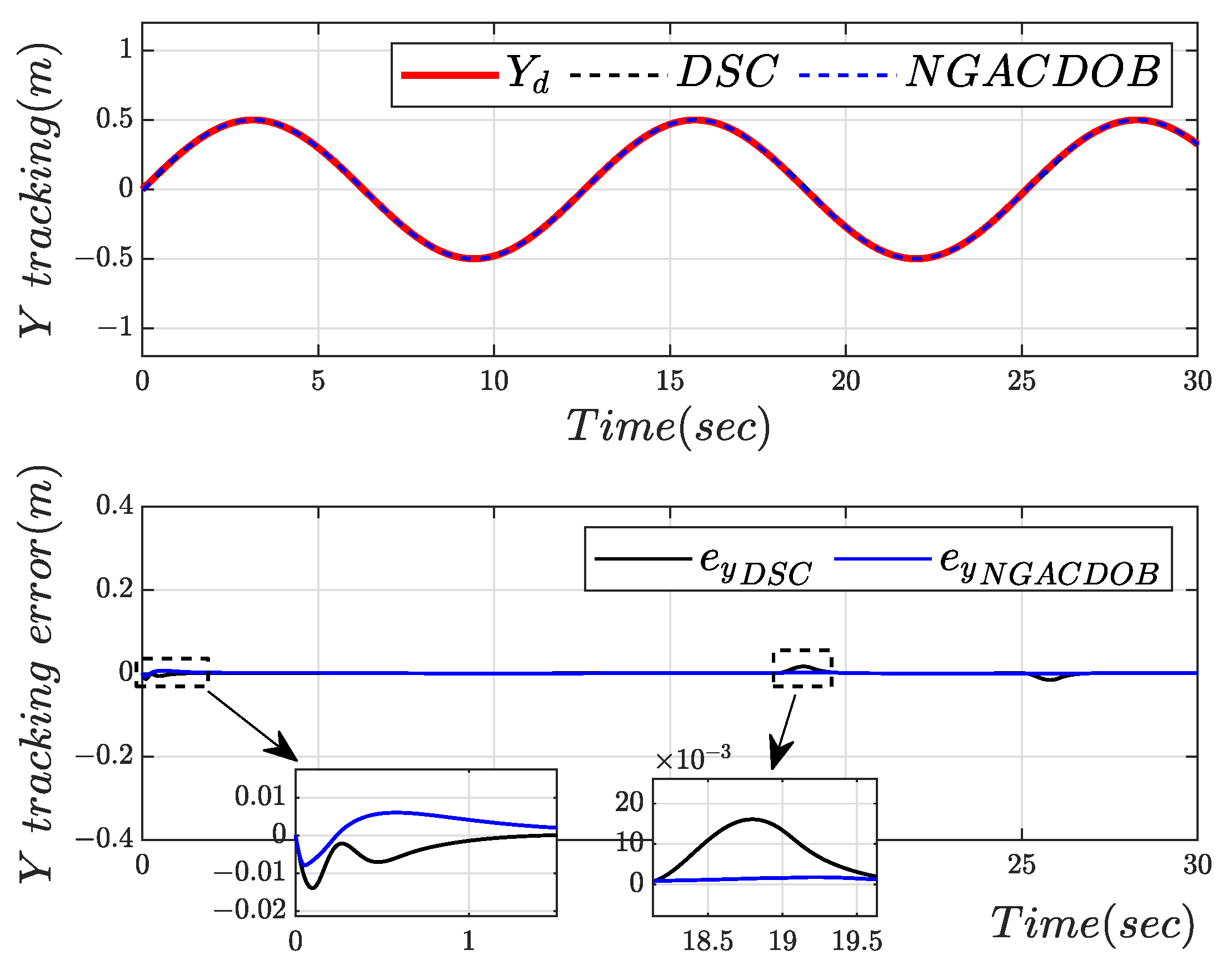
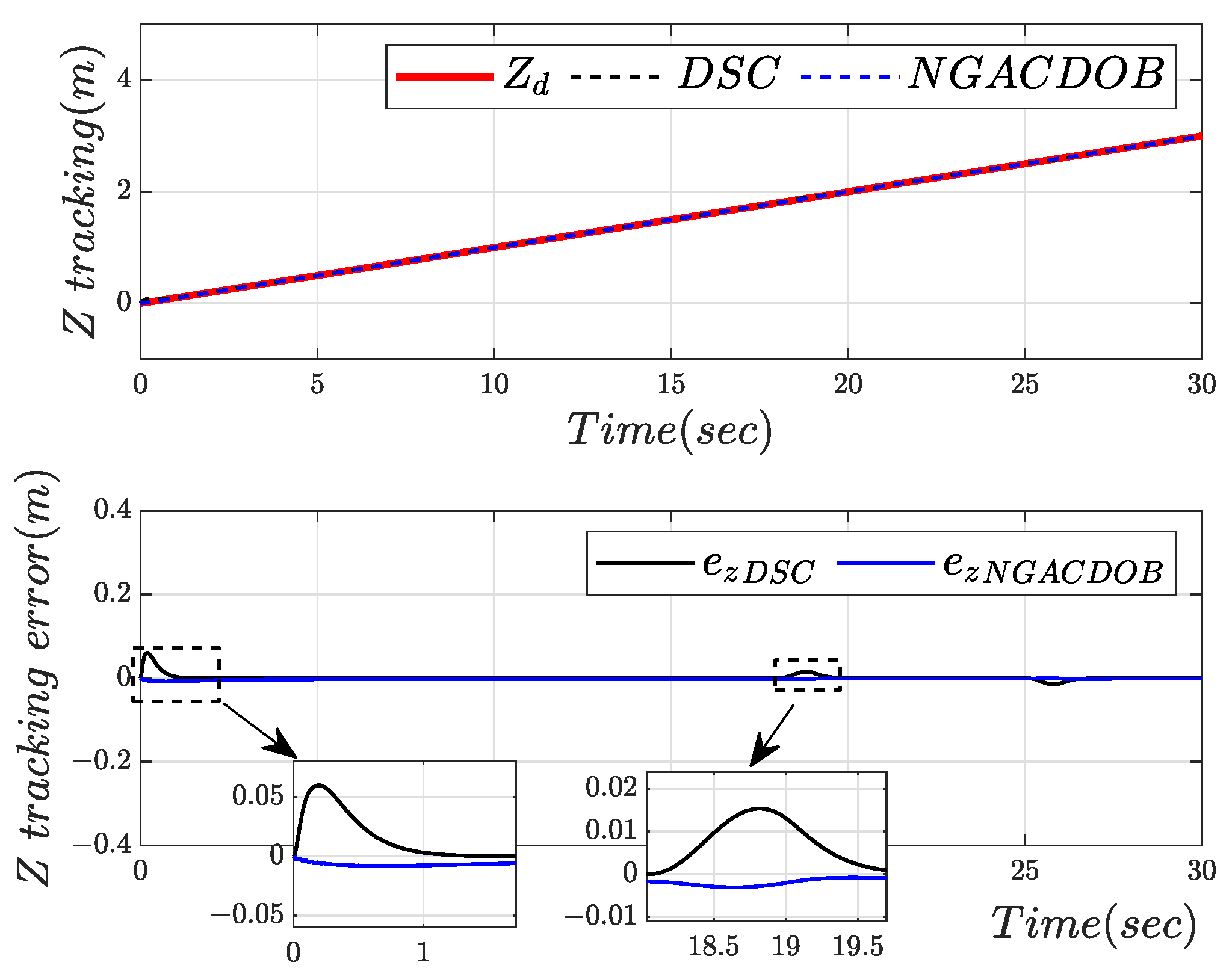
Figure 22 and
Figure 23 show that the NGACDOB controller has a faster response and less overshoot in both the Y and Z directions, especially noticeable in the Z direction at the beginning. When disturbed at the 18th and 25th seconds, the NGACDOB controller demonstrates a much stronger disturbance rejection capability and a stronger recovery ability after the disturbance compared to the DSC controller.
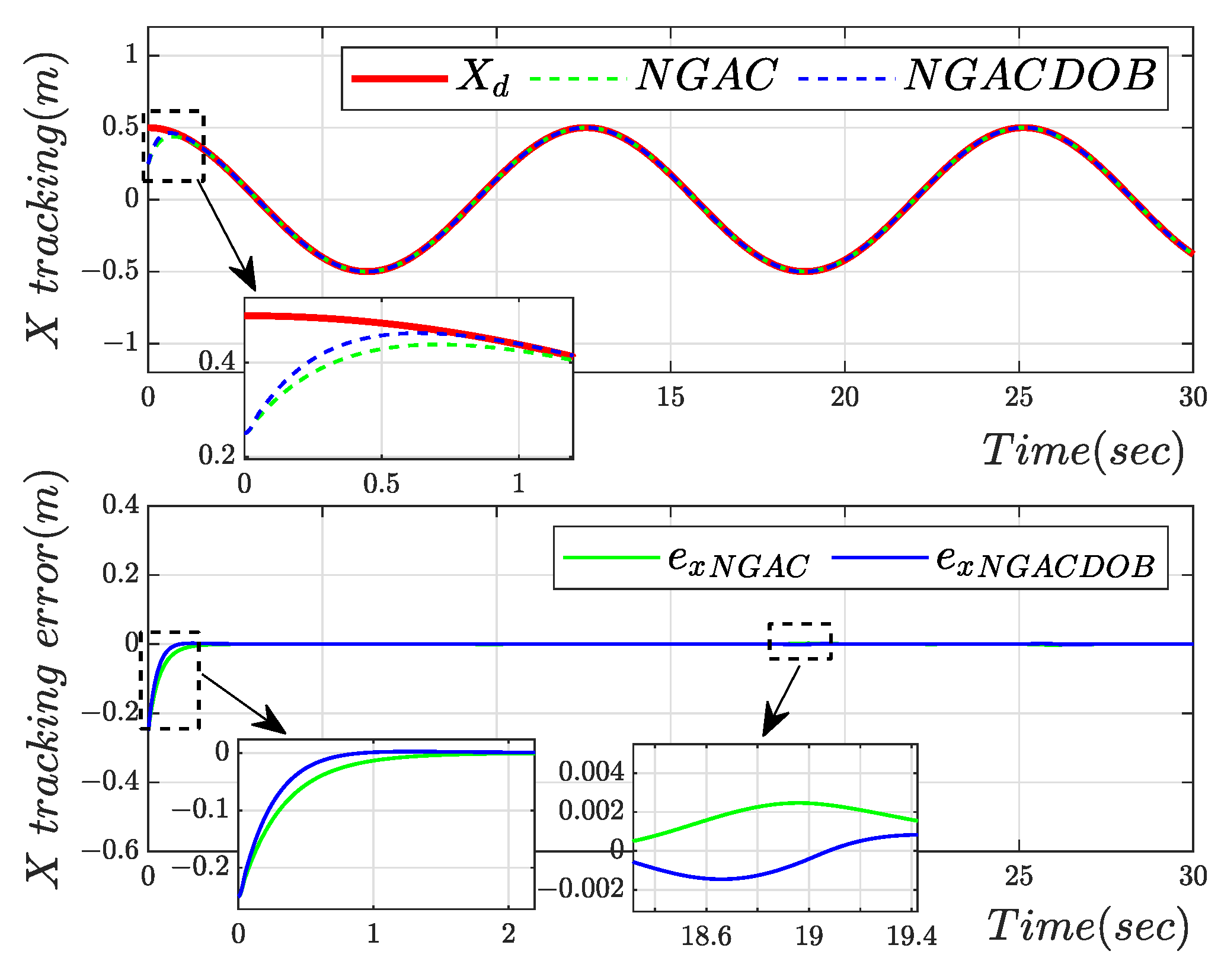
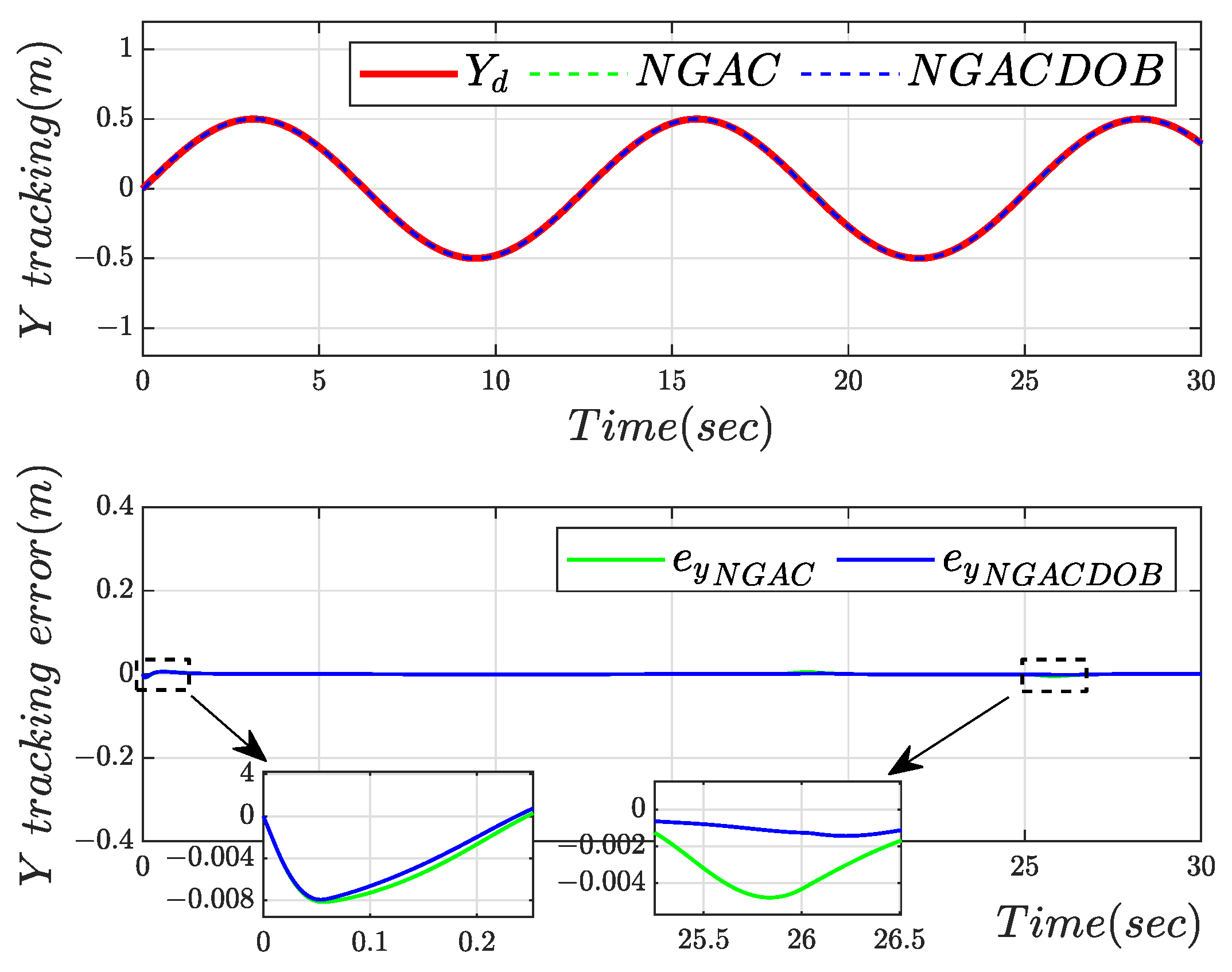
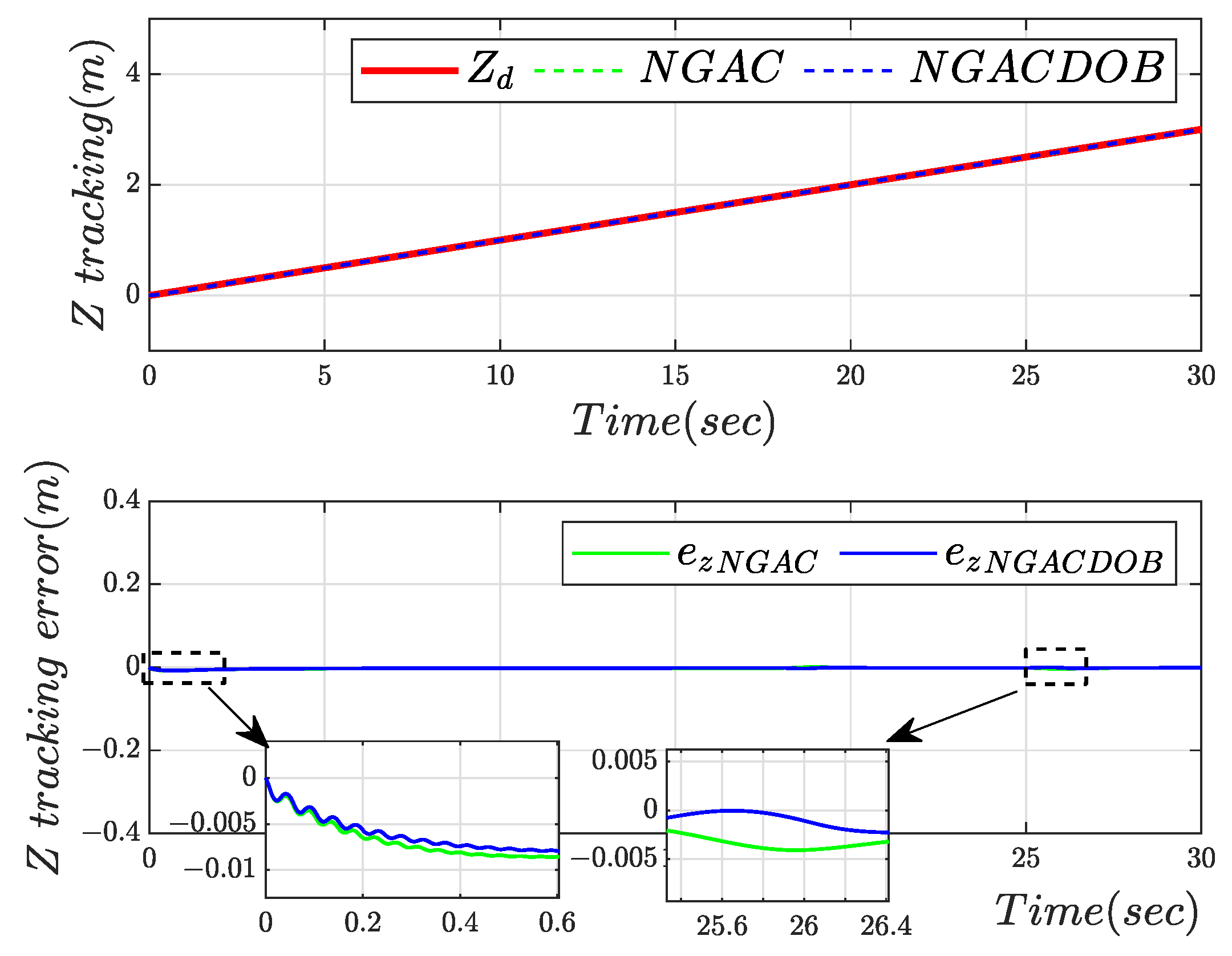
Experiment 3: The simulation results of NGAC vs. NGACDOB
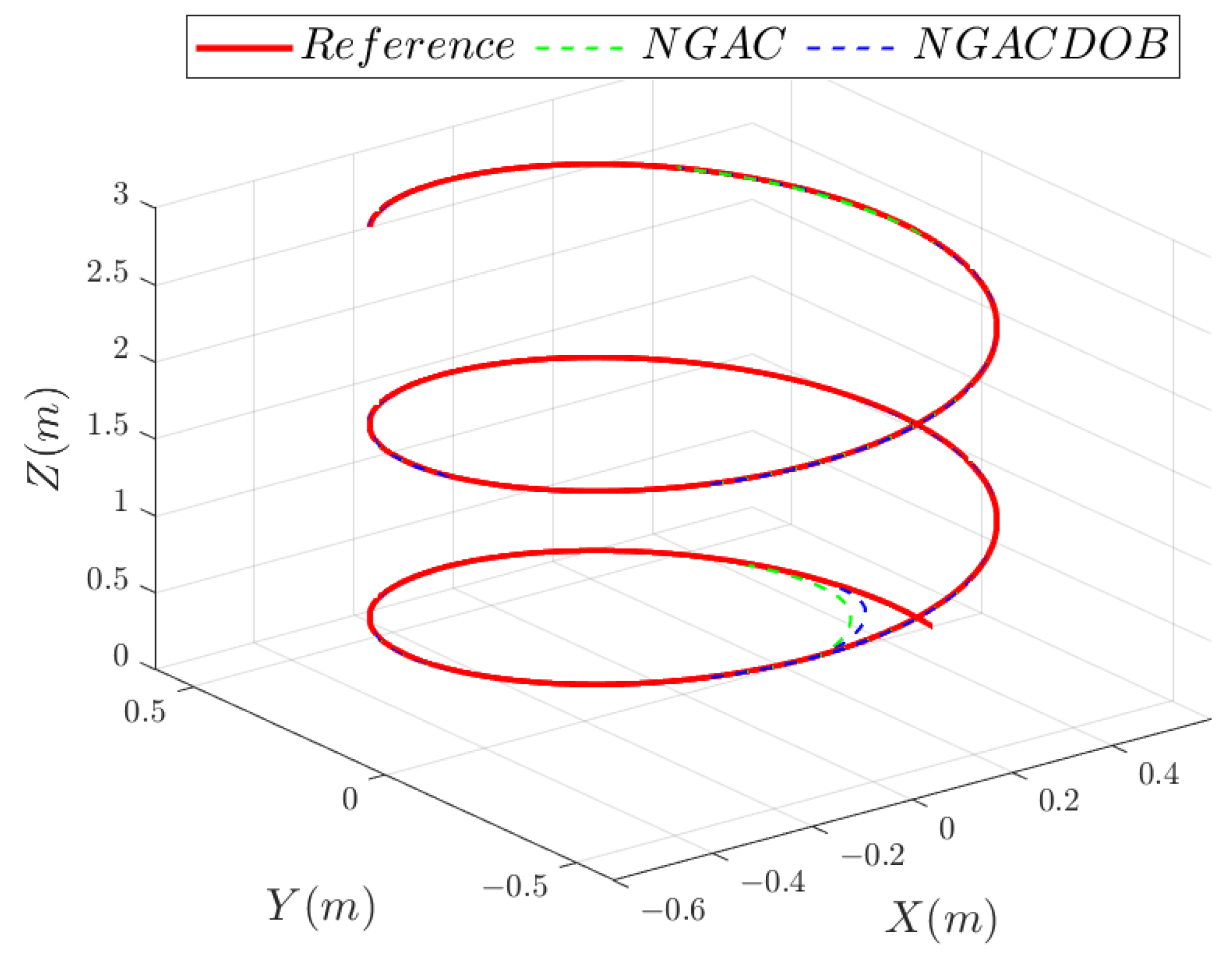
The difference between the NGAC controller and the NGACDOB controller lies in the fact that the NGAC controller does not have a disturbance observer, and the impact of having or not having a disturbance observer can be seen in the experimental results. In
Figure 24, the blue line shows a faster response, and at the 25th second, it is clear that the green line deviates from the red line, indicating that the NGACDOB controller has better disturbance rejection performance.
Figure 25,
Figure 26 and
Figure 27 show that the NGACDOB controller has a faster response, but the advantage is not significant. When the system is disturbed at the 25th second, the difference in deviation between the two controllers in
Figure 25 and
Figure 27 is small, whereas the difference in
Figure 26 is larger. Combining the four figures, it can be concluded that the NGACDOB controller has a slight advantage over the NGAC controller in terms of response speed and disturbance rejection capability.
5.4. Results Analysis
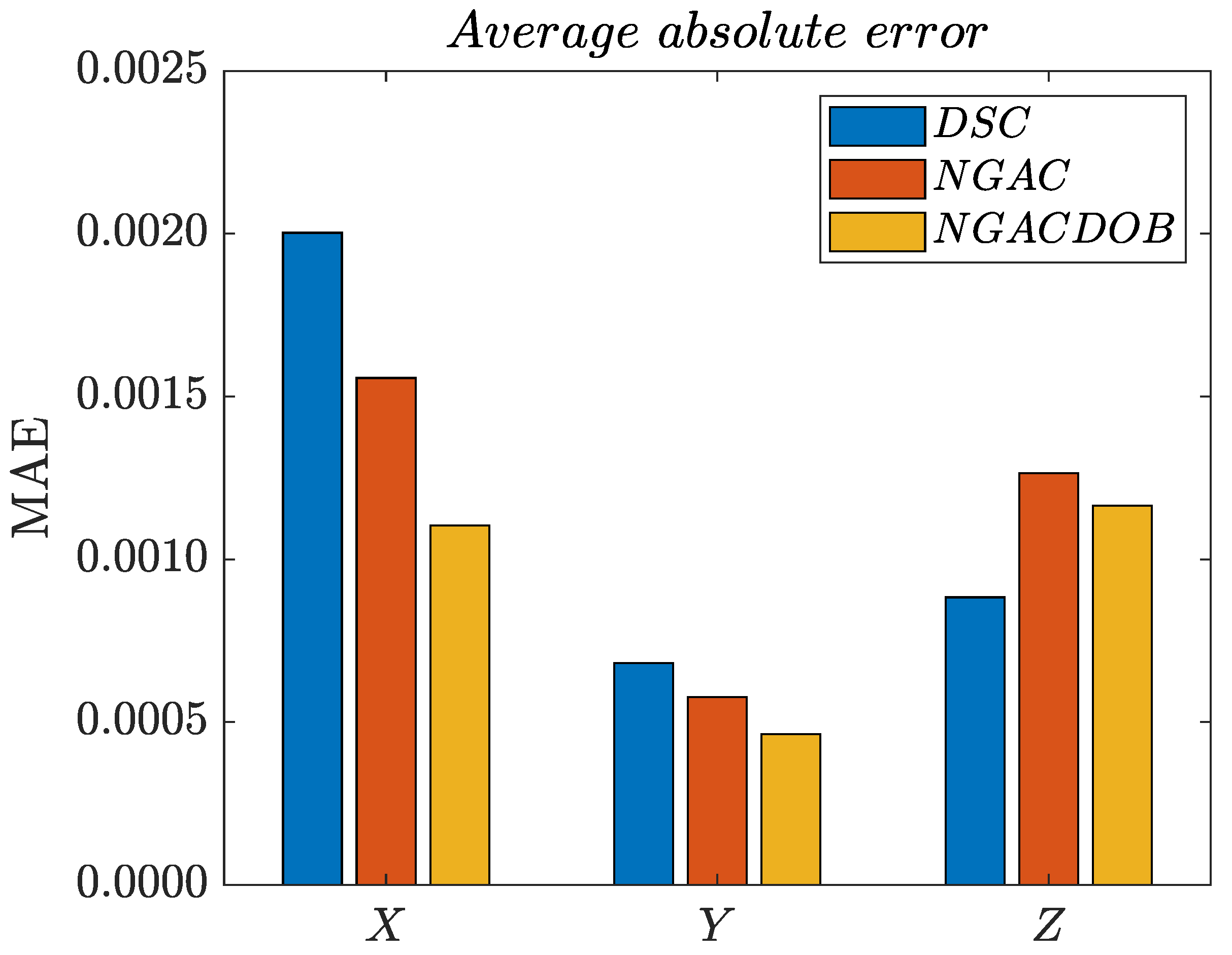
In this subsection, we analyze the data from the aforementioned experiments. To better analyze the tracking performance of different controllers, we employ two types of errors for a qualitative analysis of the three controllers discussed in the previous section.
The first error introduced is the Mean Absolute Error (MAE), which is a measure of the average magnitude of the errors between the reference values and the actual values. It is calculated by taking the absolute value of the difference between each pair of reference and actual values, summing these absolute differences, and then dividing by the number of data points. The formula for MAE is:
where
n is the number of data points,
is the actual value of the
i-th data point,
is the reference value for the
i-th data point. MAE is a non-negative value, and a lower MAE indicates a better fit of the model to the data, meaning the actual values are closer to the reference values.
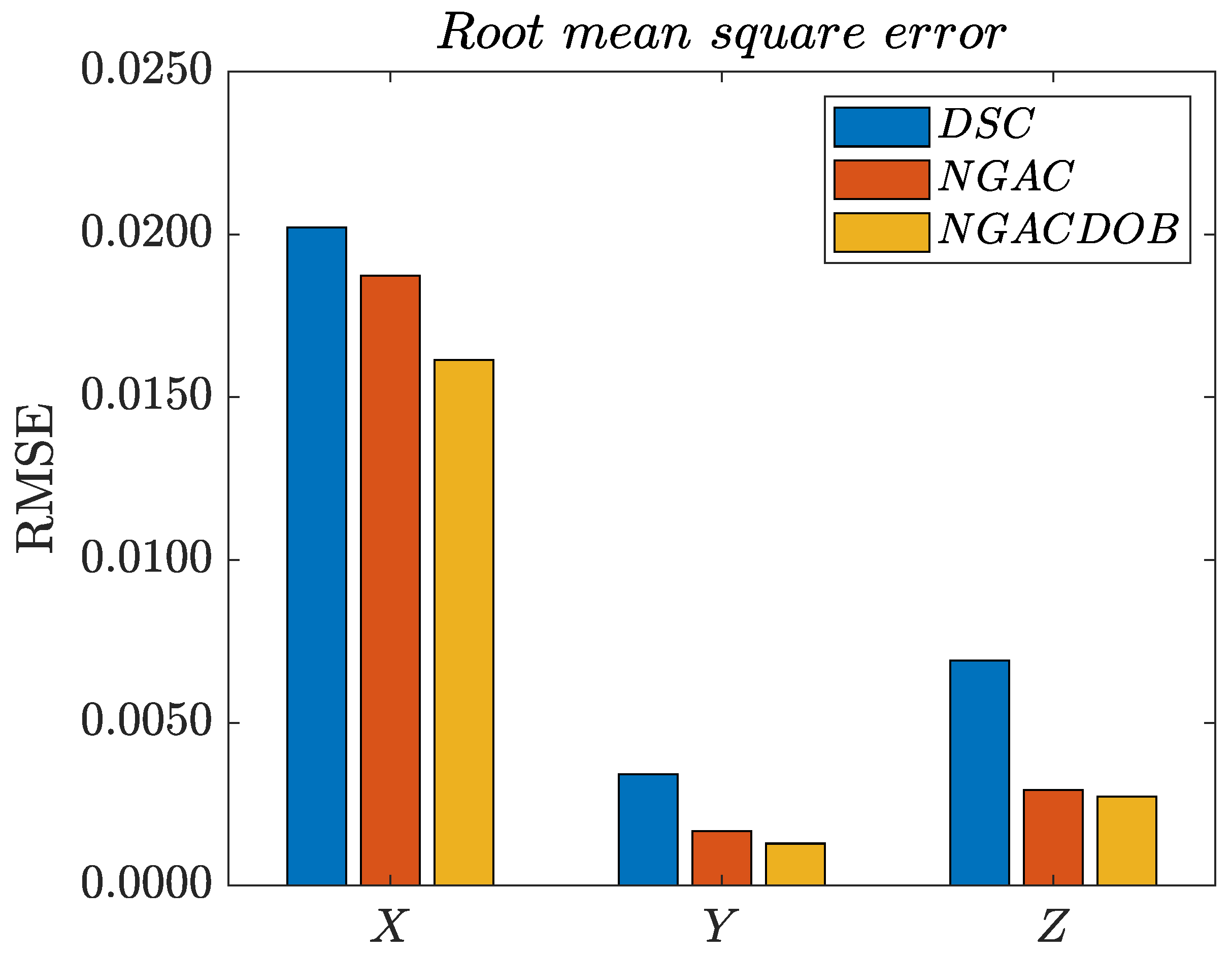
To better describe the stability of the controller, the second error introduced is the Root Mean Square Error (RMSE), which represents the standard deviation of the differences between reference values and actual values in a dataset. RMSE is calculated by squaring the differences between each reference value and the actual value, averaging these squared differences, and then taking the square root of the result. The formula for RMSE is:
where
n is the number of data points,
is the actual value of the
i-th data point, and
is the reference value for the
i-th data point. The value of RMSE reflects the degree of dispersion of actual values relative to reference values; a smaller RMSE indicates that the differences between actual and reference values are smaller, suggesting that the system is more stable.
Through the above two kinds of errors, the data of the three controllers in the above section are analyzed, and the comparison of data results is shown in
Figure 28 and
Figure 29.
Figure 28 presents the MAE comparisons among the three controllers, where the NGACDOB controller, compared to the DSC controller, reduces the error by 44.88% in the X direction, by 32.66% in the Y direction, and increases the error by 31.91% in the Z direction. When compared to the NGAC controller, the NGACDOB controller reduces the error by 29.09% in the X direction, by 19.72% in the Y direction, and by 7.90% in the Z direction. Therefore, the NGACDOB controller improves tracking in the X and Y directions but performs poorly in the Z direction.
Figure 29 shows the RMSE comparisons among the three controllers, where the NGACDOB controller, compared to the DSC controller, reduces the error by 20.11% in the X direction, by 62.24% in the Y direction, and by 60.53% in the Z direction. When compared to the NGAC controller, the NGACDOB controller reduces the error by 13.78% in the X direction, by 22.80% in the Y direction, and by 6.99% in the Z direction. Thus, the NGACDOB controller exhibits better stability relative to the other two controllers.


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}