



Estimation Method of Chlorophyll Concentration Distribution Based on UAV Aerial Images Considering Turbid Water Distribution in a Reservoir


Abstract
:1. Introduction
2. Materials and Methods
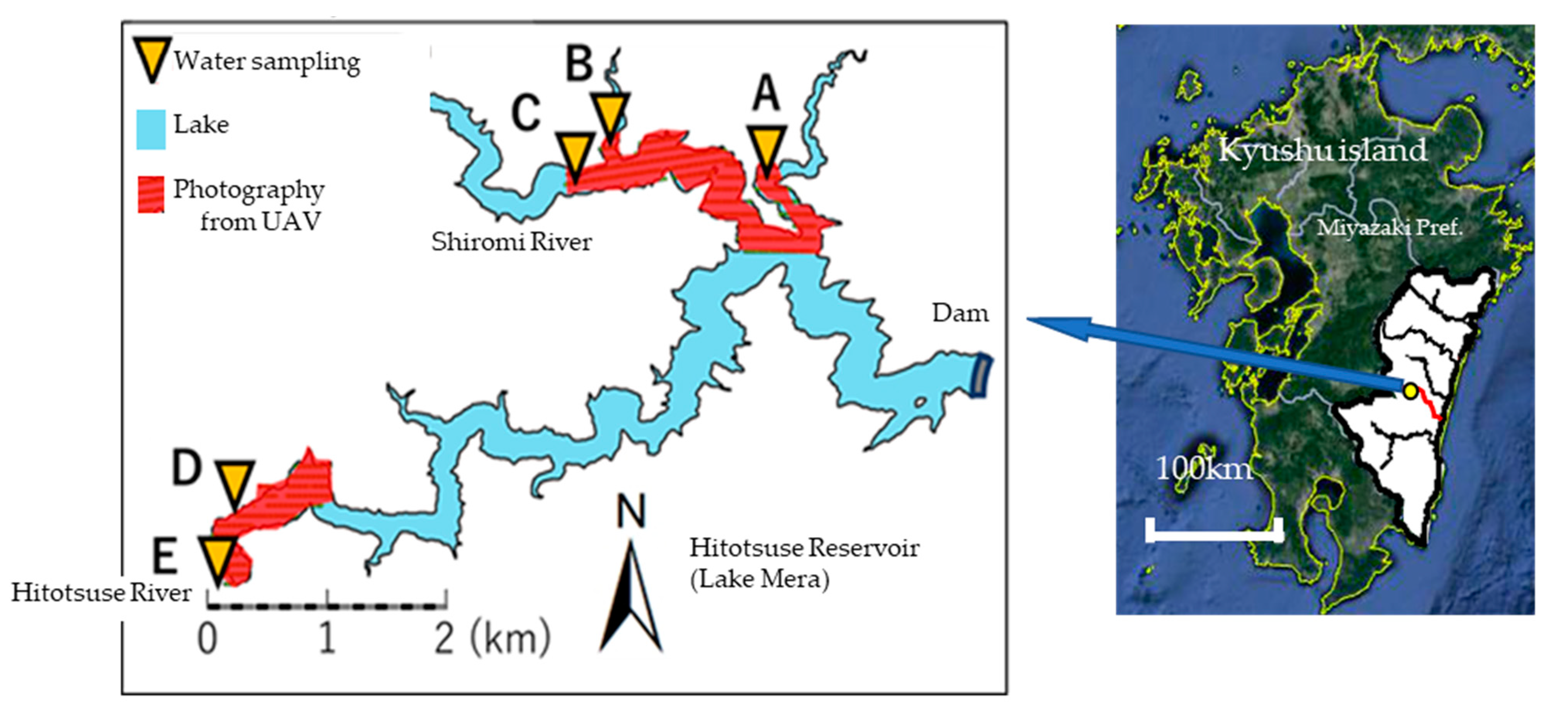
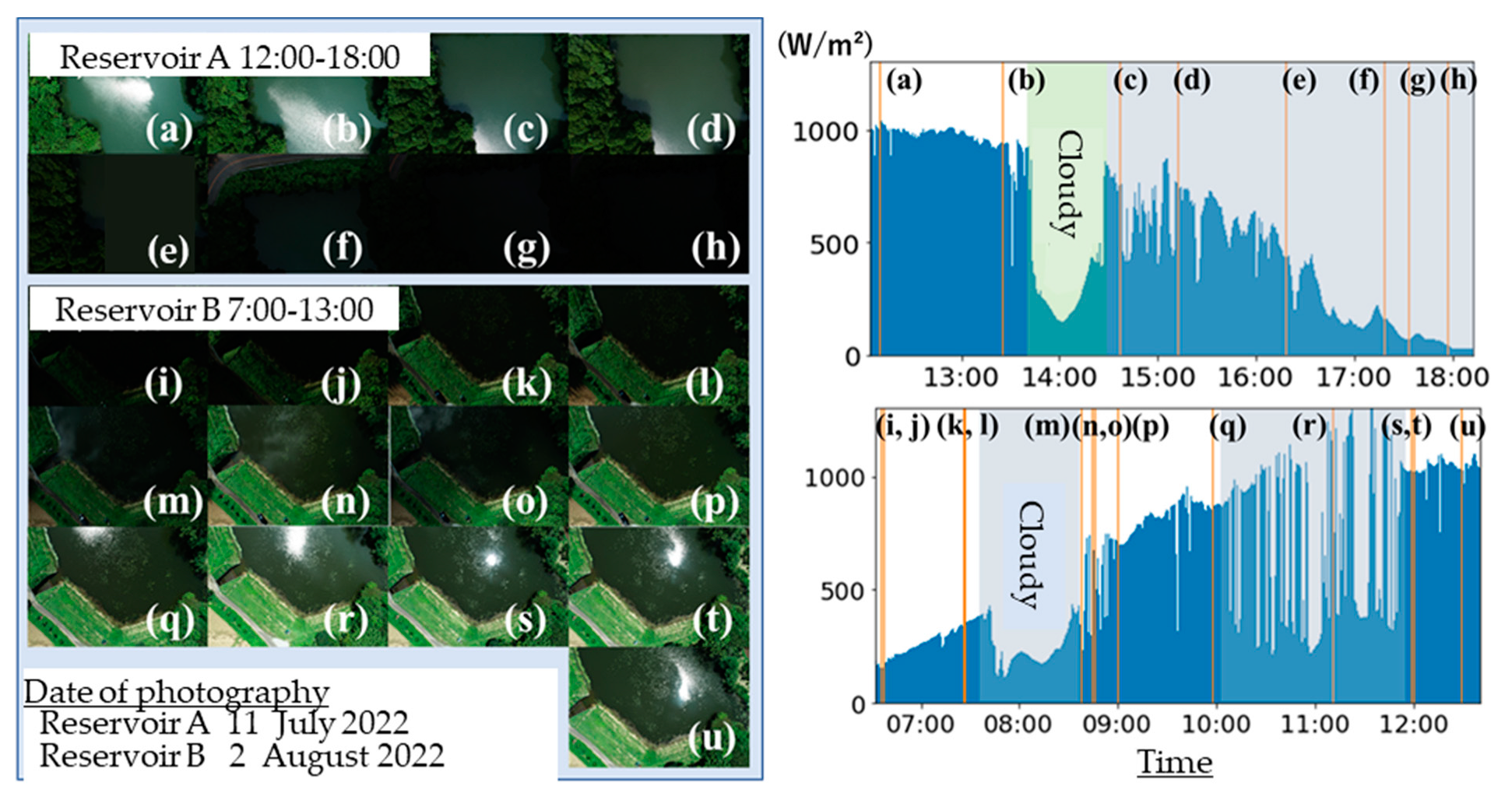
2.1. Study Site and Photography from the UAV
2.2. Water Sampling and Vertical Profiling
2.3. Distribution of Turbidity
2.4. The Flow Chart of the Overall Processes for Machine Learning
2.5. Rectification of the Coordinates (Georeferencing)
3. Results and Discussion
3.1. Calibration of the Reflectance
3.2. Turbidity Estimation from the Satellite Images
3.3. Classification of the Presence or Absence of Bloom and Regression of the Chl-a Concentration
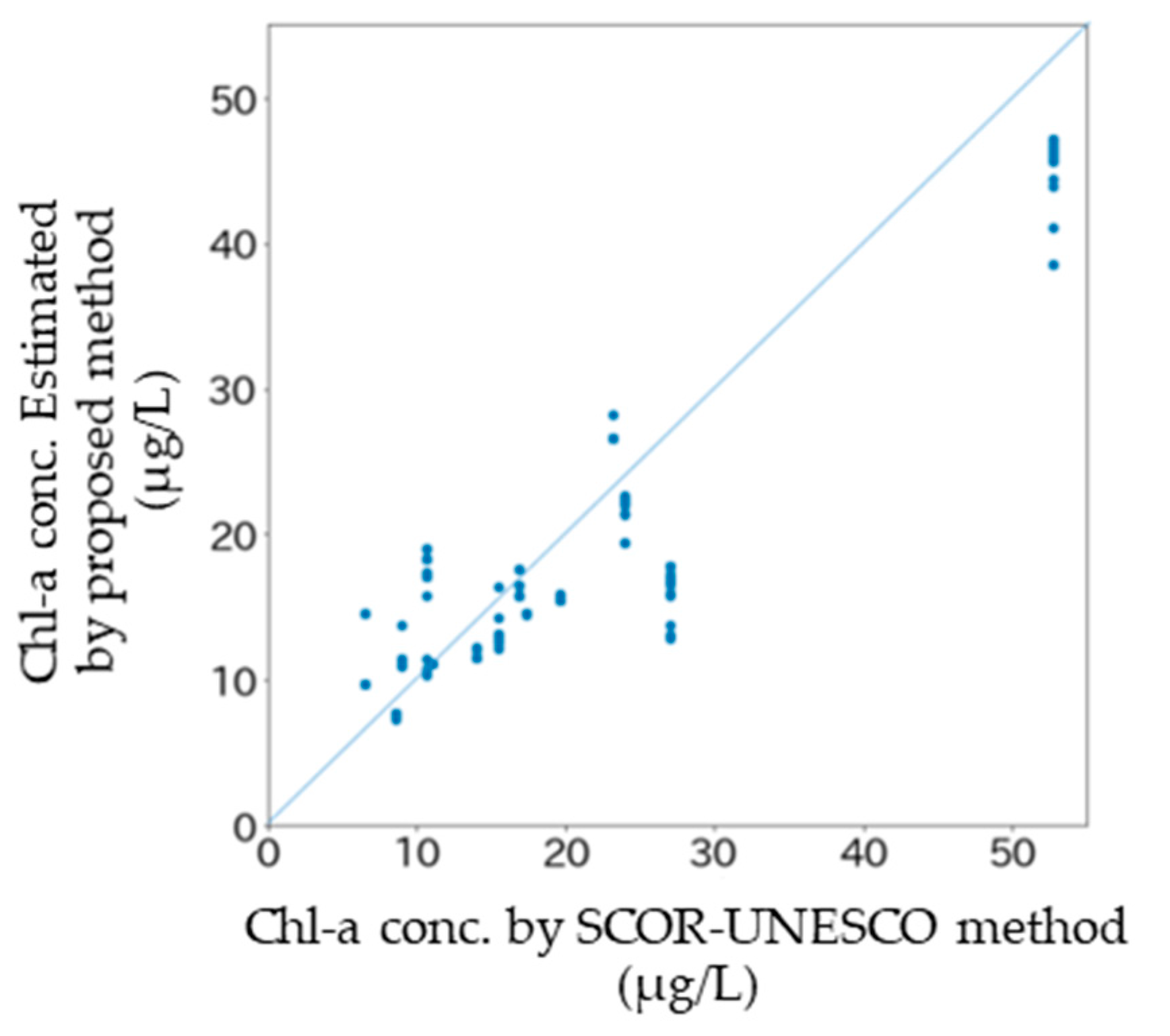
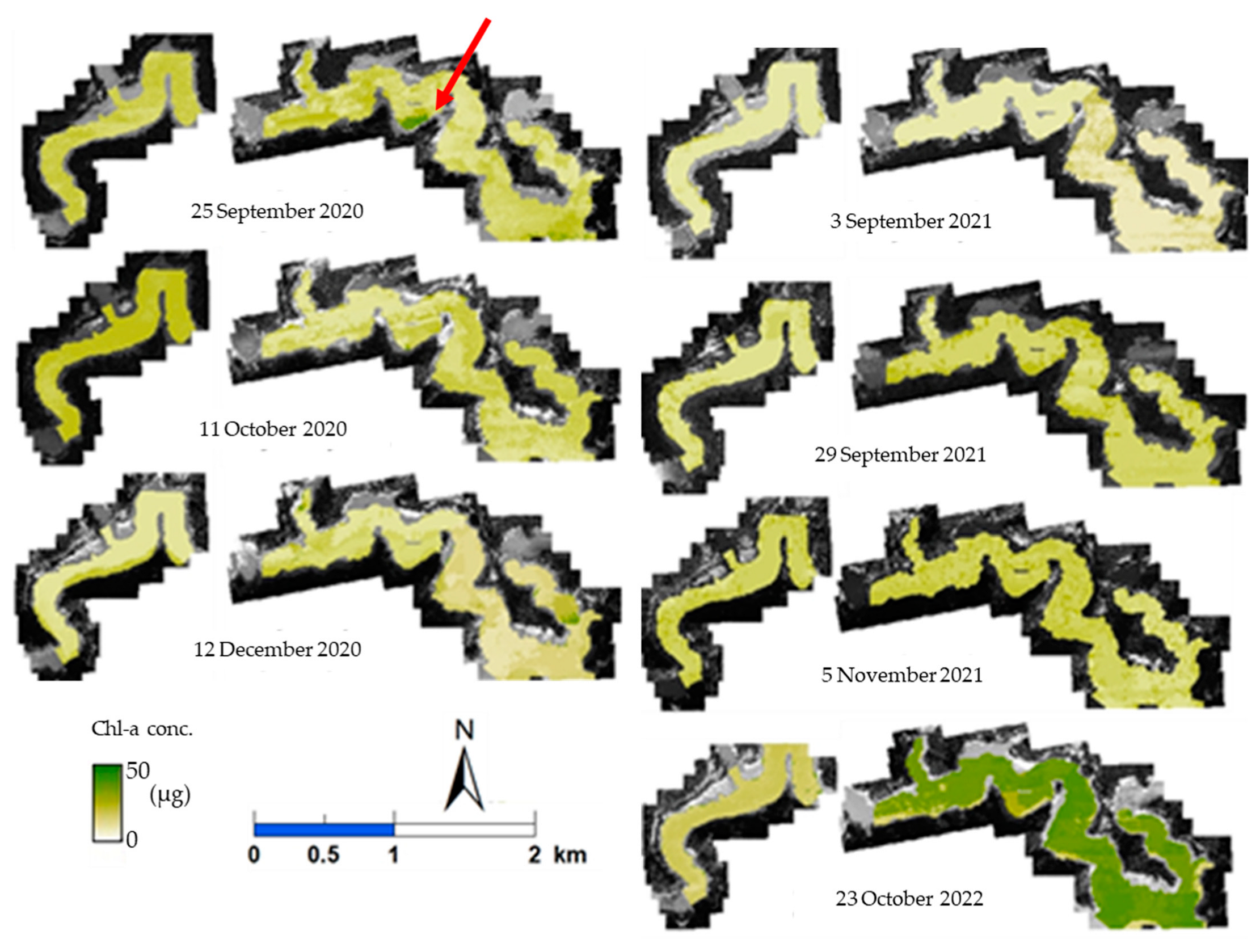
3.4. Distribution of the Concentration of Chl-a Estimated by the Proposed Method
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ellison, M.E.; Brett, M.T. Particulate phosphorus bioavailability as a function of stream flow and land cover. Water Res. 2006, 40, 1258. [Google Scholar] [CrossRef] [PubMed]
- Azhikodan, G.; Yokoyama, K. Spatio-temporal variability of phytoplankton (Chlorophyll-a) in relation to salinity, suspended sediment concentration, and light intensity in a macrotidal estuary. Cont. Shelf Res. 2016, 126, 15–26. [Google Scholar] [CrossRef]
- Allison, A.O.; Randy, A.D.; Michae, L.D. The upside-down river: Reservoirs, algal blooms, and tributaries affect temporal and spatial patterns in nitrogen and phosphorus in the Klamath River, USA. J. Hydrol. 2014, 519, 164–176. [Google Scholar]
- Dabrowski, T.; Lyons, K.; Nolan, G.; Berry, A.; Cusack, C.; Silke, J. Harmful algal bloom forecast system for SW Ireland. Part I: Description and validation of an operational forecasting model. Harmful Algae. 2016, 53, 64–76. [Google Scholar] [CrossRef] [PubMed]
- Welch, E.B. Ecological Effects of Wastewater: Applied Limnology and Pollutant Effects, 2nd ed.; CRC Press: London, UK, 1992. [Google Scholar] [CrossRef]
- Carmichael, W.W. The toxins of cyanobacteria. Sci. Am. 1994, 270, 78–84. [Google Scholar] [CrossRef] [PubMed]
- Downing, J.A.; Watson, S.B.; McCauley, E. Predicting cyanobacteria dominance in lakes. Can. J. Fish. Aquat. Sci. 2001, 58, 1905–1908. [Google Scholar] [CrossRef]
- Jilbert, T.; Couture, R.M.; Huser, B.J. Preface: Restoration of eutrophic lakes: Current practices and future challenges. Hydrobiologia 2020, 847, 4343–4357. [Google Scholar] [CrossRef]
- Anderson, D.M.; Fensin, E.; Gobler, C.J.; Hoeglund, A.E.; Hubbard, K.A.; Kulis, D.M.; Landsberg, J.H.; Lefebvre, K.A.; Provoost, P.; Richlen, M.; et al. Marine harmful algal blooms (HABs) in the United States: History, current status and future trends. Harmful Algae 2021, 102, 101975. [Google Scholar] [CrossRef] [PubMed]
- Anderson, D.M.; Cembella, A.D.; Hallegraeff, G.M. Progress in understanding harmful algal blooms: Paradigm shifts and new technologies for research, monitoring, and management. Annu. Rev. Mar. Sci. 2012, 4, 143–176. [Google Scholar] [CrossRef]
- Díaz, P.A.; Ruiz-Villarreal, M.; Pazos, Y.; Moita, T.; Reguera, B. Climate variability and Dinophysis acuta blooms in an upwelling system. Harmful Algae 2016, 53, 145–159. [Google Scholar] [CrossRef]
- Yu, Z.; Tang, Y.; Gobler, J.C. Harmful algal blooms in China: History, recent expansion, current status, and future prospects. Harmful Algae 2023, 129, 102499. [Google Scholar] [CrossRef] [PubMed]
- Houliez, E.; Lizon, F.; Lefebvre, S.; Artigas, L.F.; Schmitt, F.G. Phytoplankton photosynthetic activity dynamics in a temperate macrotidal ecosystem (the Strait of Dover, eastern English Channel): Time scales of variability and environmental control. J. Mar. Syst. 2015, 147, 61–75. [Google Scholar] [CrossRef]
- Azevedo, I.C.; Duarte, P.M.; Bordalo, A.A. Understanding spatial and temporal dynamics of key environmental characteristics in a mesotidal Atlantic estuary (Douro, NW Portugal). Estuar. Coast. Shelf Sci. 2008, 76, 620–633. [Google Scholar] [CrossRef]
- Perry, R.I.; Nemcek, N.; Hennekes, M.; Sastri, A.; Ross, R.S.A.; Shannon, H.; Shartau, B.R. Domoic acid in Canadian Pacific waters, from 2016 to 2021, and relationships with physical and chemical conditions. Harmful Algae 2023, 129, 102530. [Google Scholar] [CrossRef] [PubMed]
- Mori, M.; Gonzalez Flores, R.; Suzuki, Y.; Nukazawa, K.; Hiraoka, T.; Nonaka, H. Prediction of Microcystis Occurrences and Analysis Using Machine Learning in High-Dimension, Low-Sample-Size and Imbalanced Water Quality Data. Harmful Algae 2022, 117, 102273. [Google Scholar] [CrossRef] [PubMed]
- Shan, K.; Wang, X.; Yang, H.; Zhou, B.; Song, L.; Shang, M. Use statistical machine learning to detect nutrient thresholds in Microcystis blooms and microcystin management. Harmful Algae 2020, 94, 101807. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, T.; Wang, X.; Jin, X.; Xu, J.; Yu, J.; Zhang, H.; Zhao, Z. An approach of improved Multivariate Timing-Random Deep Belief Net modeling for algal bloom prediction. Biosyst. Eng. 2019, 177, 130–138. [Google Scholar] [CrossRef]
- Wang, F.; Guo, S.; Liang, J.; Sun, X. Water column stratification governs picophytoplankton community structure in the oligotrophic eastern Indian Ocean. Mar. Environ. Res. 2023, 189, 106074. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.J.; He, W.; Liu, W.X.; Qin, N. The seasonal and spatial variations of phytoplankton community and their correlation with environmental factors in a large eutrophic Chinese lake (Lake Chaohu). Ecol. Indic. 2014, 40, 58–67. [Google Scholar] [CrossRef]
- Dale, B.; Murphy, M. A retrospective appraisal of the importance of high-resolution sampling for harmful algal blooms: Lessons from long-term phytoplankton monitoring at Sherkin Island, S.W. Ireland. Harmful Algae 2014, 40, 23–33. [Google Scholar] [CrossRef]
- Nwe, L.W.; Yokoyama, K.; Azhikodan, G. Phytoplankton habitats and size distribution during a neap-spring transition in the highly turbid macrotidal Chikugo River estuary. Sci. Total Environ. 2022, 850, 157810. [Google Scholar] [CrossRef] [PubMed]
- Chaffin, J.D.; Kane, D.D.; Stanislawczyk, K.; Parker, E.M. Accuracy of data buoys for measurement of cyanobacteria, chlorophyll, and turbidity in a large lake (Lake Erie, North America): Implications for estimation of cyanobacterial bloom parameters from water quality sonde measurements. Environ. Sci. Pollut. Res. Int. 2018, 25, 25175–25189. [Google Scholar] [CrossRef] [PubMed]
- Veerapaga, N.; Shintani, T.; Azhikodan, G.; Yokoyama, K. Study on Salinity Intrusion and Mixing Types in a Conceptual Estuary Using 3-D Hydrodynamic Simulation: Effects of Length, Width, Depth, and Bathymetry. In Estuaries and Coastal Zones in Times of Global Change; Nguyen, K., Guillou, S., Gourbesville, P., Thiébot, J., Eds.; Springer: Singapore, 2020. [Google Scholar] [CrossRef]
- Nakayama, K.; Komai, K.; Amano, M.; Horii, S.; Somiya, Y.; Kumamoto, E.; Oyama, Y. Ideal water temperature environment for giant Marimo (Aegagropila linnaei) in Lake Akan, Japan. Sci. Rep. 2023, 13, 16834. [Google Scholar] [CrossRef] [PubMed]
- Le, H.N.; Shintani, T.; Nakayama, K. A Detailed Analysis on Hydrodynamic Response of a Highly Stratified Lake to Spatio-Temporally Varying Wind Field. Water 2023, 15, 565. [Google Scholar] [CrossRef]
- Xu, X.; Ishikawa, T.; Nakamura, T. Three-dimensional modeling of hydrodynamics and dissolved oxygen transport in tone river estuary. J. JSCE 2013, 1, 194–213. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Zhang, Y.; Huang, Q.; Gao, J. When and where to reduce nutrients for controlling harmful algal blooms in large eutrophic lake Chaohu, China? Ecol. Indic. 2018, 89, 808–817. [Google Scholar] [CrossRef]
- Maguire, J.; Cusack, C.; Ruiz-Villarreal, M.; Silke, J.; McElligott, D.; Davidson, K. Applied simulations and integrated modeling for the understanding of toxic and harmful algal blooms (ASIMUTH): Integrated HAB forecast systems for Europe’s Atlantic Arc. Harmful Algae 2016, 53, 160–166. [Google Scholar] [CrossRef] [PubMed]
- Lin, Z.; Zhan, P.; Li, J.; Sasaki, J.; Qiu, Z.; Chen, C.; Zou, S.; Yang, X.; Gu, H. Physical drivers of Noctiluca scintillans (Dinophyceae) blooms outbreak in the northern Taiwan Strait: A numerical study. Harmful Algae 2024, 133, 102586. [Google Scholar] [CrossRef] [PubMed]
- Jin, D.; Lee, E.; Kwon, K.; Kim, T. A deep learning model using satellite ocean color and hydrodynamic model to estimate chlorophyll-a concentration. Remote Sens. 2021, 13, 2003. [Google Scholar] [CrossRef]
- Mamun, M.; Ferdous, J.; An, K.-G. Empirical estimation of nutrient, organic matter and algal chlorophyll in a drinking water reservoir using Landsat 5 TM data. Remote Sens. 2021, 13, 2256. [Google Scholar] [CrossRef]
- Li, D.; Gao, Z.; Song, D.; Shang, W.; Jiang, X. Characteristics and influence of green tide drift and dissipation in Shandong Rongcheng coastal water based on remote sensing. Estuar. Coast. Shelf Sci. 2019, 227, 106335. [Google Scholar] [CrossRef]
- Hu, L.; Zeng, K.; Hu, C.; He, M.X. On the remote estimation of Ulva prolifera areal coverage and biomass. Remote Sens. Environ. 2019, 223, 194–207. [Google Scholar] [CrossRef]
- Mugani, R.; El Khalloufi, F.; Kasada, M.; Redouane, M.; Haida, M.; Aba, R.P.; Essadki, Y.; Zerrifi, S.A.; Herter, S.O.; Hejjaj, A.; et al. Monitoring of toxic cyanobacterial blooms in Lalla Takerkoust reservoir by satellite imagery and microcystin transfer to surrounding farms. Harmful Algae 2024, 135, 102631. [Google Scholar] [CrossRef]
- Chen, X.; Shang, S.; Lee, Z.; Qi, L.; Yan, J.; Li, Y. High-frequency observation of floating algae from AHI on Himawari-8. Remote Sens. Environ. 2019, 227, 151–161. [Google Scholar] [CrossRef]
- Liu, M.; Ling, H.; Wu, D.; Su, X.; Cao, Z. Sentinel-2 and Landsat-8 Observations for Harmful Algae Blooms in a Small Eutrophic Lake. Remote Sens. 2021, 13, 4479. [Google Scholar] [CrossRef]
- Ma, J.; Jin, S.; Li, J.; He, Y.; Shang, W. Spatio-Temporal Variations and Driving Forces of Harmful Algal Blooms in Chaohu Lake: A Multi-Source Remote Sensing Approach. Remote Sens. 2021, 13, 427. [Google Scholar] [CrossRef]
- Zhang, T.; Hu, H.; Ma, X.; Zhang, Y. Long-Term Spatiotemporal Variation and Environmental Driving Forces Analyses of Algal Blooms in Taihu Lake Based on Multi-Source Satellite and Land Observations. Water 2020, 12, 1035. [Google Scholar] [CrossRef]
- Soomets, T.; Uudeberg, K.; Jakovels, D.; Brauns, A.; Zagars, M.; Kutser, T. Validation and Comparison of Water Quality Products in Baltic Lakes Using Sentinel-2 MSI and Sentinel-3 OLCI Data. Sensors 2020, 20, 742. [Google Scholar] [CrossRef] [PubMed]
- Toth, C.; Jóźków, G. Remote sensing platforms and sensors: A survey. ISPRS J. Photogramm. Remote Sens. 2016, 115, 22–36. [Google Scholar] [CrossRef]
- Vélez-Nicolás, M.; García-López, S.; Barbero, L.; Ruiz-Ortiz, V.; Sánchez-Bellón, Á. Applications of unmanned aerial systems (UASs) in hydrology: A review. Remote Sens. 2021, 13, 1359. [Google Scholar] [CrossRef]
- Qu, M.; Anderson, S.; Lyu, P.; Malang, Y.; Lai, J.; Liu, J.; Jiang, B.; Xie, F.; Liu, H.H.; Lefebvre, D.D.; et al. Effective aerial monitoring of cyanobacterial harmful algal blooms is dependent on understanding cellular migration. Harmful Algae 2019, 87, 101620. [Google Scholar] [CrossRef] [PubMed]
- Guimarães, T.T.; Veronez, M.R.; Koste, E.C.; Gonzaga, L.; Bordin, F.; Inocencio, L.C.; Larocca, A.P.C.; De Oliveira, M.Z.; Vitti, D.C.; Mauad, F.F. An Alternative Method of Spatial Autocorrelation for Chlorophyll Detection in Water Bodies Using Remote Sensing. Sustainability 2017, 9, 416. [Google Scholar] [CrossRef]
- Su, T.-C.; Chou, H.-T. Application of Multispectral Sensors Carried on Unmanned Aerial Vehicle (UAV) to Trophic State Mapping of Small Reservoirs: A Case Study of Tain-Pu Reservoir in Kinmen, Taiwan. Remote Sens. 2015, 7, 10078–10097. [Google Scholar] [CrossRef]
- Cheng, K.H.; Chan, S.N.; Lee, J.H.W. Remote sensing of coastal algal blooms using unmanned aerial vehicles (UAVs). Mar. Pollut. Bull. 2020, 152, 110889. [Google Scholar] [CrossRef]
- Cao, Z.; Duan, H.; Feng, L.; Ma, R.; Xue, K. Climate- and human-induced changes in suspended particulate matter over Lake Hongze on short and long timescales. Remote Sens. Environ. 2017, 192, 98–113. [Google Scholar] [CrossRef]
- Hu, C.; Chen, Z.; Clayton, T.D.; Swarzenski, P.; Brock, J.C.; Muller–Karger, F.E. Assessment of estuarine water-quality indicators using MODIS medium-resolution bands: Initial results from Tampa Bay, FL. Remote Sens. Environ. 2004, 93, 423–441. [Google Scholar] [CrossRef]
- Kishino, M.; Tanaka, A.; Ishizaka, J. Retrieval of Chlorophyll a, suspended solids, and colored dissolved organic matter in Tokyo Bay using ASTER data. Remote Sens. Environ. 2005, 99, 66–74. [Google Scholar] [CrossRef]
- Sakuno, Y.; Yajima, H.; Yoshioka, Y.; Sugahara, S.; Abd Elbasit, M.A.M.; Adam, E.; Chirima, J.G. Evaluation of Unified Algorithms for Remote Sensing of Chlorophyll-a and Turbidity in Lake Shinji and Lake Nakaumi of Japan and the Vaal Dam Reservoir of South Africa under Eutrophic and Ultra-Turbid Conditions. Water 2018, 10, 618. [Google Scholar] [CrossRef]
- Palmer, S.C.J.; Hunter, P.D.; Lankester, T.; Hubbard, S.; Spyrakos, E.N.; Tyler, A.; Présing, M.; Horváth, H.; Lamb, A.; Balzter, H.; et al. Validation of Envisat MERIS algorithms for chlorophyll retrieval in a large, turbid and optically-complex shallow lake. Remote Sens. Environ. 2015, 157, 158–169. [Google Scholar] [CrossRef]
- Alcântara, E.; Bernardo, N.; Watanabe, F.; Rodrigues, T.; Rotta, L.; Carmo, A.; Shimabukuro, M.; Gonçalves, S.; Imai, N. Estimating the CDOM absorption coefficient in tropical inland waters using OLI/Landsat-8 images. Remote Sens. Lett. 2016, 7, 661–670. [Google Scholar] [CrossRef]
- Glukhovets, D.; Kopelevich, O.; Yushmanova, A.; Vazyulya, S.; Sheberstov, S.; Karalli, P.; Sahling, I. Evaluation of the CDOM absorption coefficient in the Arctic seas based on Sentinel-3 OLCI data. Remote Sens. 2020, 12, 3210. [Google Scholar] [CrossRef]
- Yamagata, Y.; Wiegand, C.; Akiyama, T.; Shibayama, M. Water turbidity and perpendicular vegetation indices for paddy rice flood damage analyses. Remote Sens. Environ. 1988, 26, 241–251. [Google Scholar] [CrossRef]
- Murakami, T.; Suzuki, Y.; Oishi, H.; Ito, K.; Nakao, T. Tracing the source of difficult to settle fine particles which cause turbidity in the Hitotsuse reservoir. J. Environ. Manag. 2013, 120, 37–47. (In Japanese) [Google Scholar] [CrossRef]
- Murakami, T.; Nakayama, H.; Mizuguchi, S.; Sugio, S.; Ootawara, N. Effective Countermeasures to long-term Turbid Water Effluence from the Hitotsuse Dam Reservoir. In Environmental Hydraulics, Two Volume Set; CRC Press: Athens, Greece, 2010; pp. 23–25. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the KDD’16: 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016. [Google Scholar]
- Available online: https://microsoft-image-composite-editor-64bits.en.softonic.com/?ex=RAMP-1768.3 (accessed on 4 April 2024).
- Irie, M.; Arakaki, S.; Suto, T.; Umino, T. Classification of River Sediment Fractions in a River Segment including Shallow Water Areas Based on Aerial Images from Unmanned Aerial Vehicles with Convolution Neural Networks. Remote Sens. 2024, 16, 173. [Google Scholar] [CrossRef]
- Brezonik, P.L.; Olmanson, L.G.; Finlay, J.C.; Bauer, M.E. Factors affecting the measurement of CDOM by remote sensing of optically complex inland waters. Remote Sens. Environ. 2015, 157, 199–215. [Google Scholar] [CrossRef]
- Shao, T.; Song, K.; Du, J.; Zhao, Y.; Lui, Z.; Zhang, B. Retrieval of CDOM and DOC using in situ hyperspectral data: A case study for potable water in Northeast China. J. Indian Soc. Remote Sens. 2015, 44, 77–89. [Google Scholar] [CrossRef]
- Brezonik, P.; Menken, K.D.; Bauer, M. Landsat-based remote sensing of lake water quality characteristics, including chlorophyll and colored dissolved organic matter (CDOM). Lake Reserv. Manag. 2005, 21, 373–382. [Google Scholar] [CrossRef]
- Coelho, C.; Heim, B.; Foerster, S.; Brosinsky, A.; De Araújo, J.C. In Situ and Satellite Observation of CDOM and Chlorophyll-a Dynamics in Small Water Surface Reservoirs in the Brazilian Semiarid Region. Water 2017, 9, 913. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Insolation | Original DN | Equivalent Reflectance under Insolation of 600 W/m2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Date | Time | (W/m2) | b | g | r | b | g | r |
| 11 October 2020 | 11:31 | 352 | 37 | 39 | 11 | 53 | 58 | 16 |
| 11:37 | 760 | 79 | 95 | 31 | 66 | 78 | 25 | |
| 3 September 2021 | 13:39 | 889 | 95 | 121 | 58 | 71 | 88 | 42 |
| 14:57 | 166 | 31 | 35 | 17 | 74 | 94 | 43 | |
| 29 September 2021 | 13:35 | 905 | 61 | 65 | 19 | 45 | 46 | 14 |
| 14:40 | 184 | 19 | 16 | 6 | 40 | 40 | 14 | |
| 16 July 2022 | 11:02 | 846 | 96 | 139 | 72 | 74 | 105 | 55 |
| 11:54 | 449 | 77 | 102 | 53 | 92 | 126 | 64 | |
| Predicted | ||
|---|---|---|
| Presence | Absence | |
| Presence | 32 | 18 |
| Absence | 0 | 50 |
| Predicted | ||
|---|---|---|
| Presence | Absence | |
| Presence | 50 | 0 |
| Absence | 0 | 50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Irie, M.; Manabe, Y.; Yamashita, M. Estimation Method of Chlorophyll Concentration Distribution Based on UAV Aerial Images Considering Turbid Water Distribution in a Reservoir. Drones 2024, 8, 224. https://doi.org/10.3390/drones8060224
Irie M, Manabe Y, Yamashita M. Estimation Method of Chlorophyll Concentration Distribution Based on UAV Aerial Images Considering Turbid Water Distribution in a Reservoir. Drones. 2024; 8(6):224. https://doi.org/10.3390/drones8060224
Chicago/Turabian StyleIrie, Mitsuteru, Yugen Manabe, and Masafumi Yamashita. 2024. "Estimation Method of Chlorophyll Concentration Distribution Based on UAV Aerial Images Considering Turbid Water Distribution in a Reservoir" Drones 8, no. 6: 224. https://doi.org/10.3390/drones8060224
APA StyleIrie, M., Manabe, Y., & Yamashita, M. (2024). Estimation Method of Chlorophyll Concentration Distribution Based on UAV Aerial Images Considering Turbid Water Distribution in a Reservoir. Drones, 8(6), 224. https://doi.org/10.3390/drones8060224