
Distributed Finite-Time ESO-Based Consensus Control for Multiple Fixed-Wing UAVs Subjected to External Disturbances


Abstract
:1. Introduction
2. Problem Formulation
3. Main Results
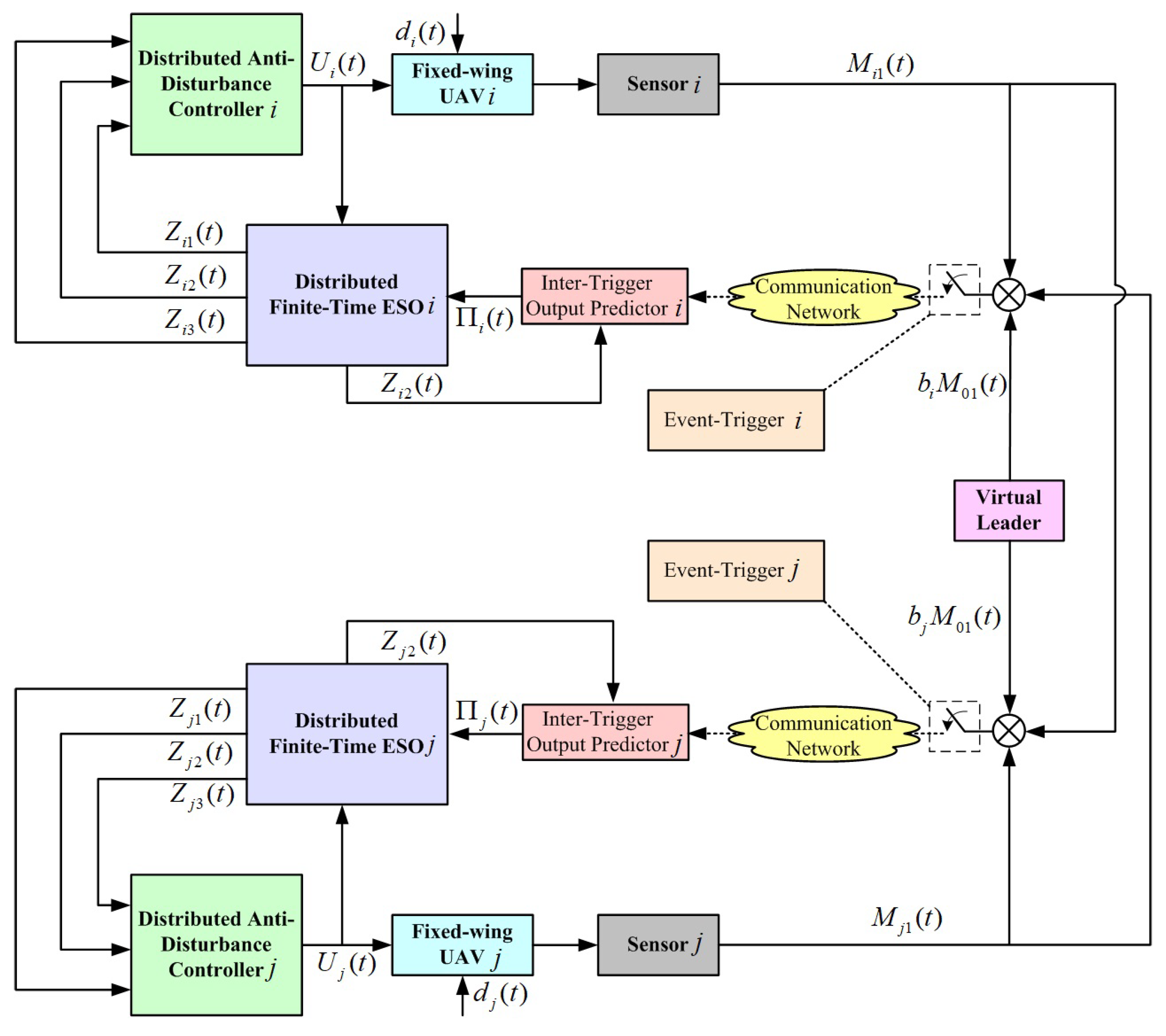
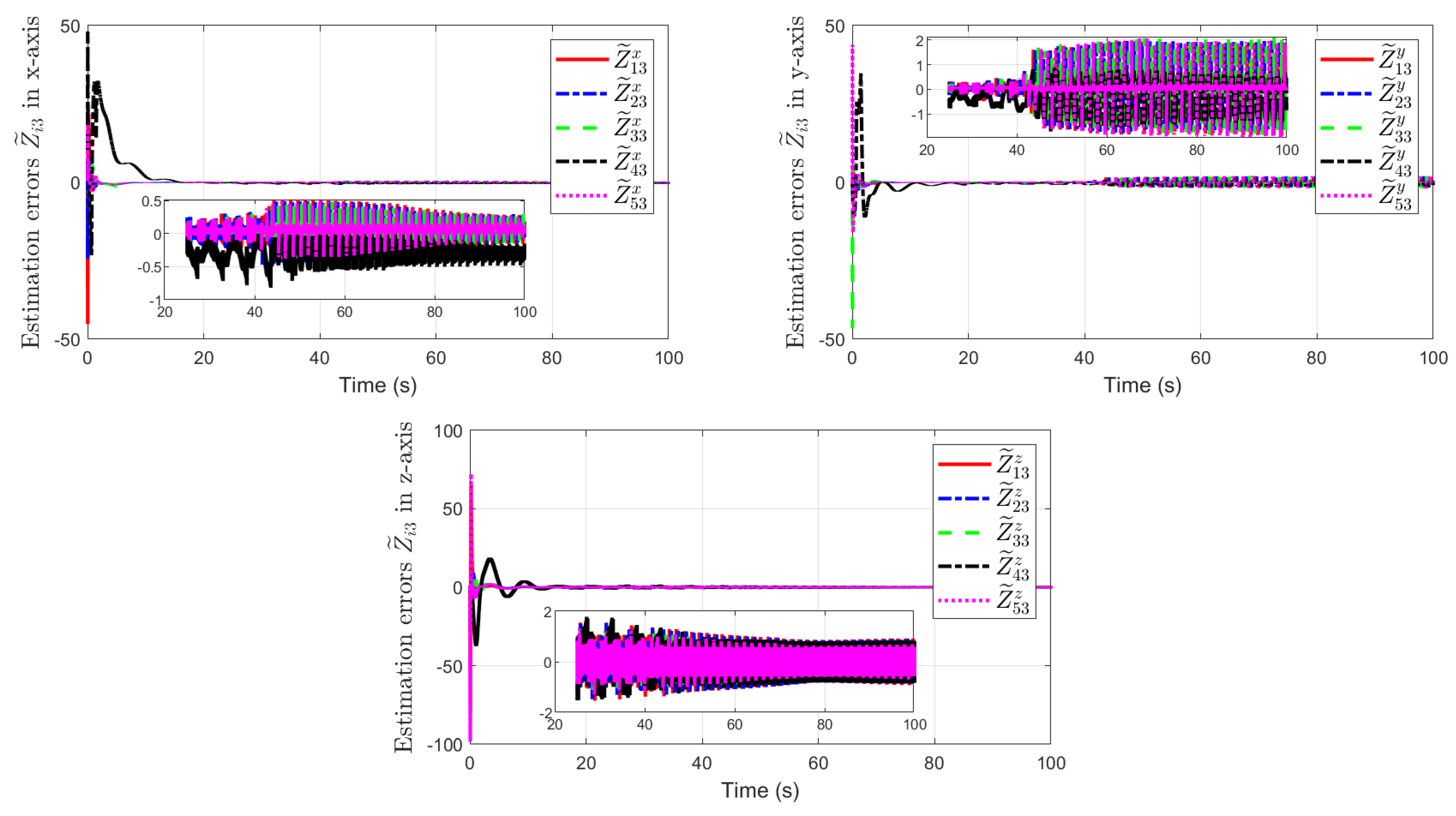
3.1. Distributed Finite-Time ESO
3.2. Distributed Anti-Disturbance Controller
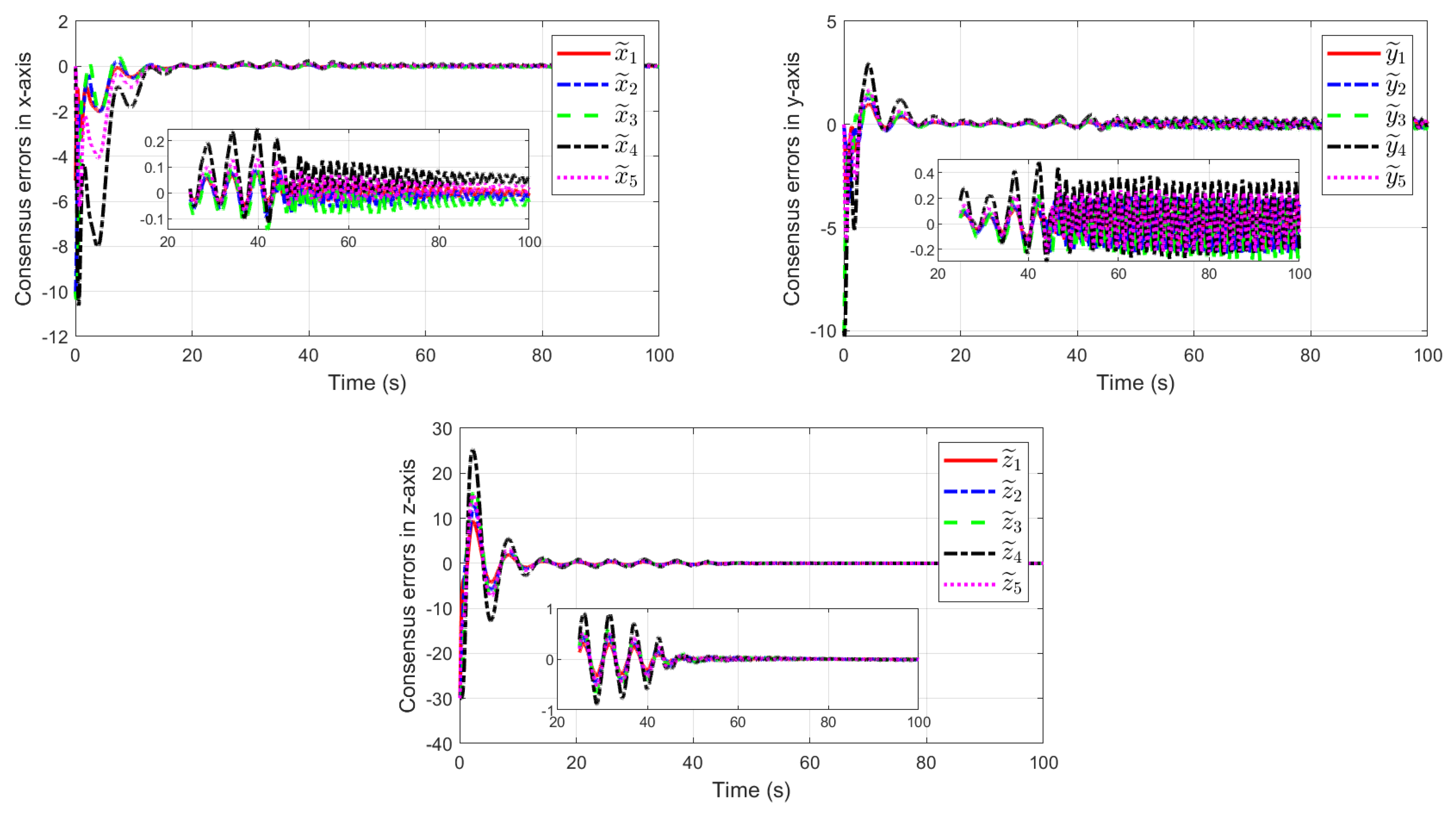
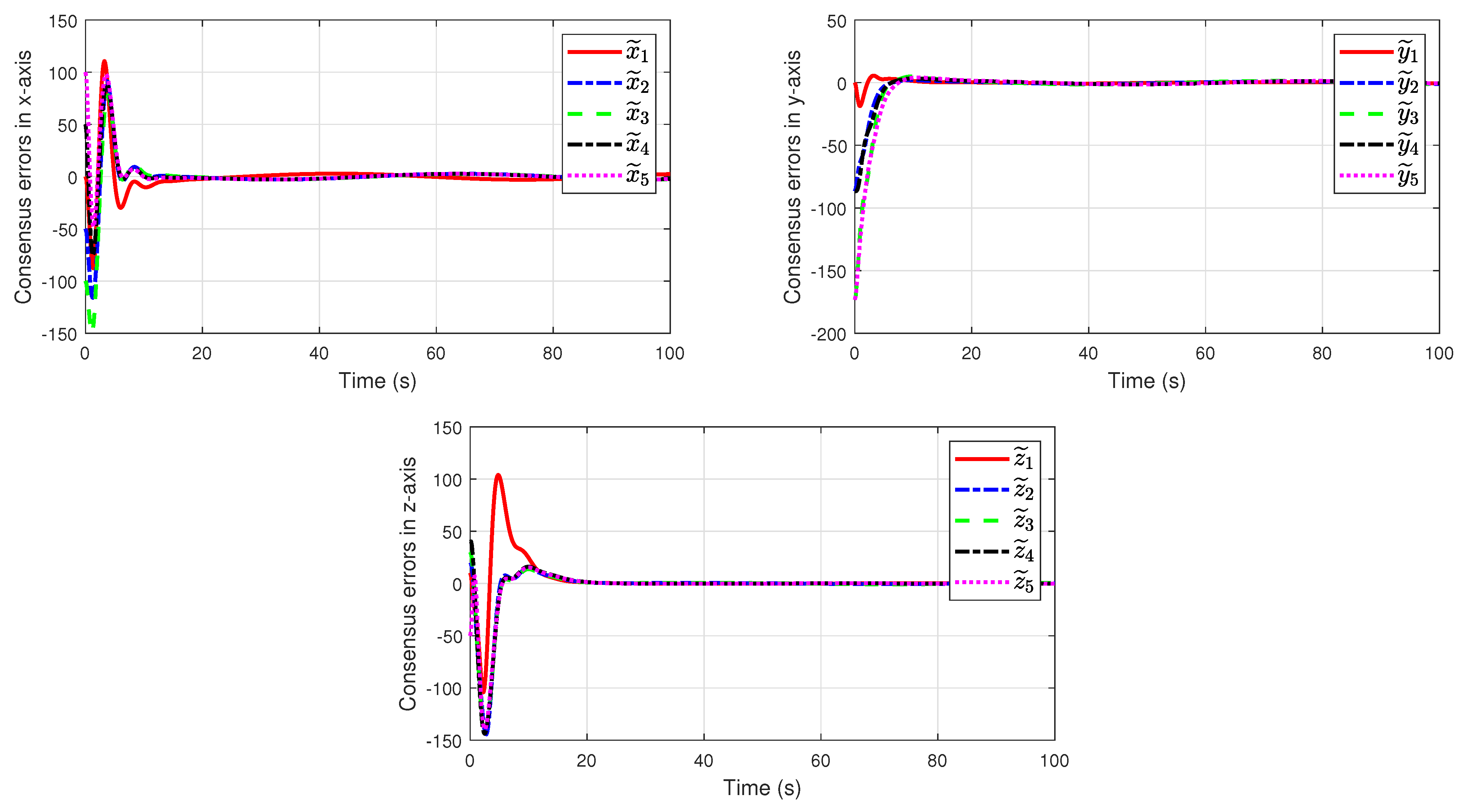
4. Numerical Simulations
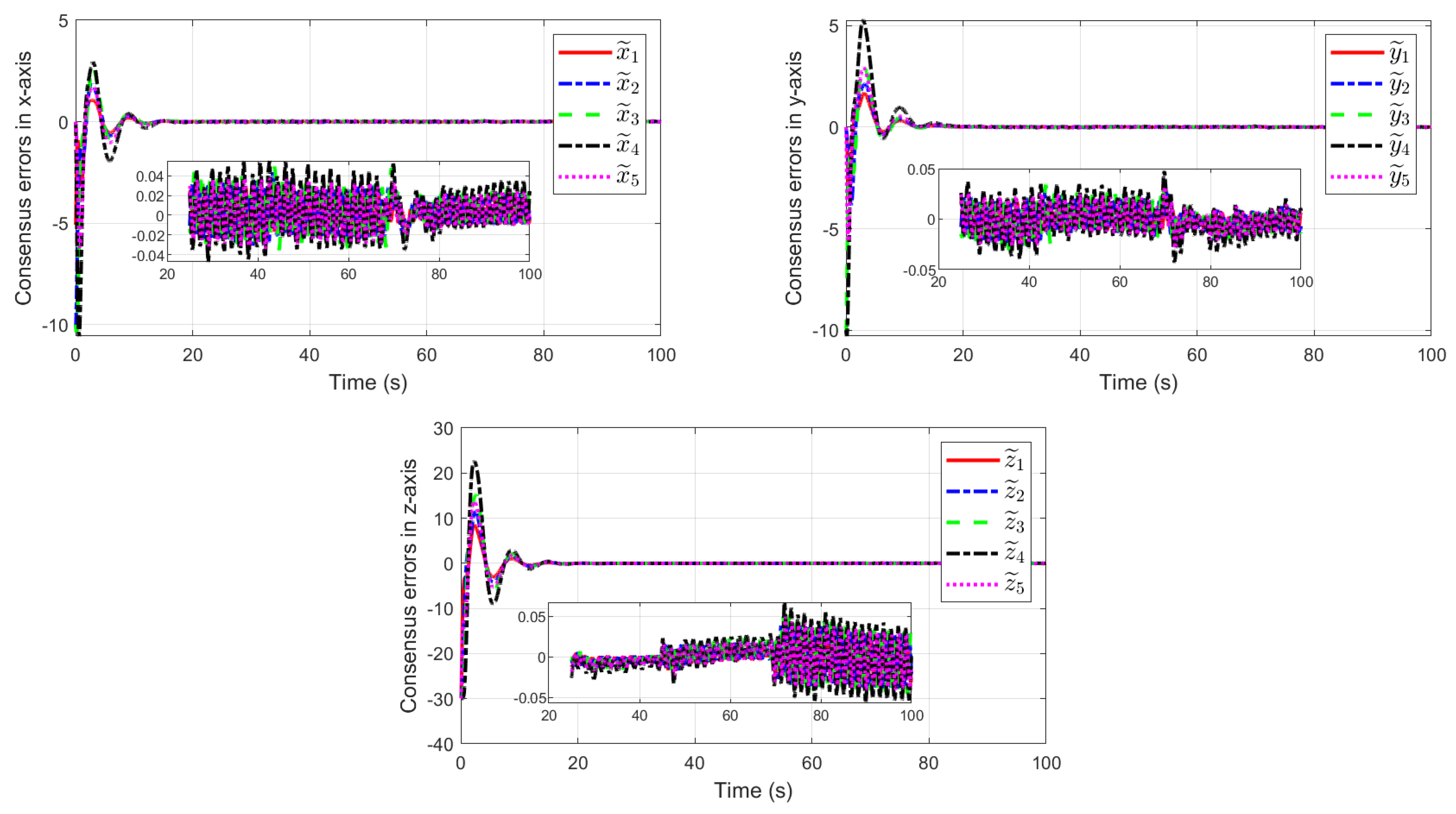
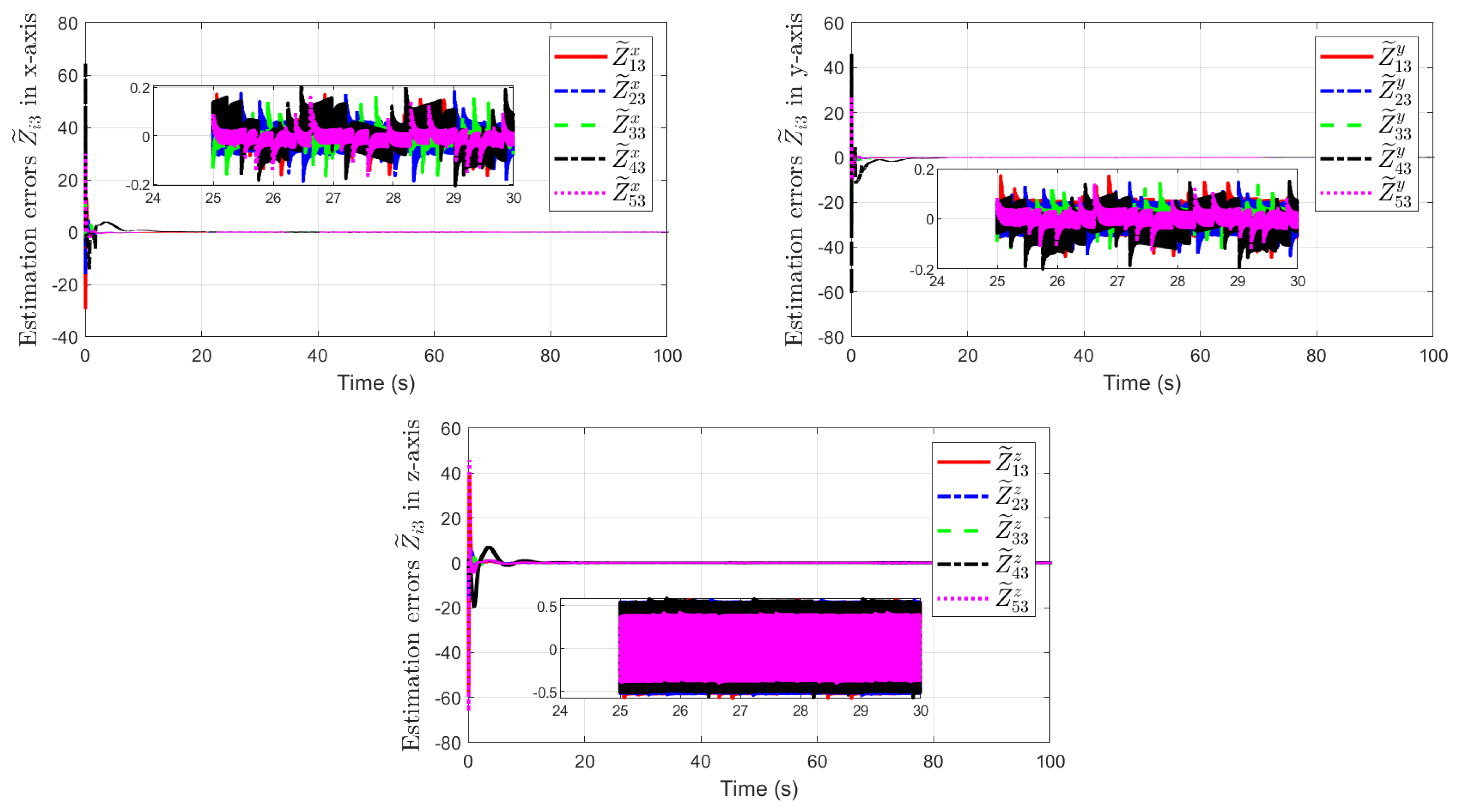
4.1. UAVs Consensus Collaborative Control Scenario
4.2. UAVs Formation Flying Scenario
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned aerial vehicle |
| ESO | Extended state observer |
| ADRC | Active disturbance rejection control |
| ETM | Event-triggered mechanism |
| ZOH | Zero-order holder |
References
- He, X.; Li, Z.; Wang, X.; Geng, Z. Roto-translation invariant formation of fixed-wing UAVs in 3D: Feasibility and control. Automatica 2024, 161, 111492. [Google Scholar] [CrossRef]
- Yang, L.; Wang, X.; Zhou, Y.; Liu, Z.; Shen, L. Online predictive visual servo control for constrained target tracking of fixed-wing unmanned aerial vehicles. Drones 2024, 8, 136. [Google Scholar] [CrossRef]
- Song, B.D.; Park, K.; Kim, J. Persistent UAV delivery logistics: MILP formulation and efficient heuristic. Comput. Ind. Eng. 2018, 120, 418–428. [Google Scholar] [CrossRef]
- Baniasadi, P.; Foumani, M.; Smithmiles, K.; Ejov, V. A transformation technique for the clustered generalized traveling salesman problem with applications to logistics. Eur. J. Oper. Res. 2020, 285, 444–457. [Google Scholar] [CrossRef]
- Yan, J.; Yu, Y.; Wang, X. Distance-based formation control for fixed-wing UAVs with input constraints: A low gain method. Drones 2022, 6, 159. [Google Scholar] [CrossRef]
- Li, Y.; Hua, C.; Guan, X. Distributed output feedback leader-following control for high-order nonlinear multiagent system using dynamic gain method. IEEE Trans. Cybern. 2020, 50, 640–649. [Google Scholar] [CrossRef]
- Zhang, D.; Duan, H.; Zeng, Z. Leader-follower interactive potential for target enclosing of perception-limited UAV groups. IEEE Syst. J. 2022, 16, 856–867. [Google Scholar] [CrossRef]
- Wang, W.; Mengali, G.; Quartaand, A.A.; Yuan, J. Distributed adaptive synchronization for multiple spacecraft formation flying around lagrange point orbits. Aerosp. Sci. Technol. 2018, 74, 93–103. [Google Scholar] [CrossRef]
- Wang, W.; Quarta, A.A.; Mengali, G.; Yuan, J. Multiple solar sail formation flying around heliocentric displaced orbit via consensus. Acta Astronaut. 2019, 154, 256–267. [Google Scholar] [CrossRef]
- Wu, Y.; Gou, J.; Hu, X.; Huang, Y. A new consensus theory-based method for formation control and obstacle avoidance of UAVs. Aerosp. Sci. Technol. 2020, 107, 106332. [Google Scholar] [CrossRef]
- Muslimov, T.Z.; Munasypov, R.A. Consensus-based cooperative control of parallel fixed-wing UAV formations via adaptive backstepping. Aerosp. Sci. Technol. 2021, 109, 106416. [Google Scholar] [CrossRef]
- Zhou, D.; Wang, Z.; Schwager, M. Agile coordination and assistive collision avoidance for quadrotor swarms using virtual structures. IEEE Trans. Robot. 2018, 34, 916–923. [Google Scholar] [CrossRef]
- Wei, L.; Chen, M.; Li, T. Disturbance-observer-based formation-containment control for UAVs via distributed adaptive event-triggered mechanisms. J. Frankl. Inst. 2021, 358, 5305–5333. [Google Scholar] [CrossRef]
- Du, Z.; Qu, X.; Shi, J.; Lu, J. Formation control of fixed-wing UAVs with communication delay. ISA Trans. 2024, 146, 154–164. [Google Scholar] [CrossRef] [PubMed]
- Huang, Z.; Chen, M. Augmented disturbance observer-based appointed-time tracking control of UAVs under exogenous disturbance. IEEE Trans. Intell. Veh. 2024, 9, 2822–2835. [Google Scholar] [CrossRef]
- Qin, B.; Zhang, D.; Tang, S.; Xu, Y. Two-layer formation-containment fault-tolerant control of fixed-wing UAV swarm for dynamic target tracking. J. Syst. Eng. Electron. 2023, 34, 1375–1396. [Google Scholar] [CrossRef]
- Liang, Y.; Dong, Q.; Zhao, Y. Adaptive leader-follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances. Chin. J. Aeronaut. 2020, 33, 2972–2988. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, T.; Jin, Y.; Wang, Y.; Qian, B. A UAV formation control method based on sliding-mode control under communication constraints. Drones 2023, 7, 231. [Google Scholar] [CrossRef]
- Zhi, Y.; Liu, L.; Guan, B.; Wang, B.; Cheng, Z.; Fan, H. Distributed robust adaptive formation control of fixed-wing UAVs with unknown uncertainties and disturbances. Aerosp. Sci. Technol. 2022, 126, 107600. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B.; Su, C.Y.; Chai, T. Fractional-order adaptive fault-tolerant synchronization tracking control of networked fixed-wing UAVs against actuator-sensor faults via intelligent learning mechanism. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 5539–5553. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Qin, Z.; Bauer, P. Decoupling control of multi-active bridge converters using linear active disturbance rejection. IEEE Trans. Ind. Electron. 2021, 68, 10688–10698. [Google Scholar] [CrossRef]
- Chang, S.; Wang, Y.; Zuo, Z. Fixed-time active disturbance rejection control and its application to wheeled mobile robots. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7120–7130. [Google Scholar] [CrossRef]
- Qin, B.; Yan, H.; Zhang, H.; Wang, Y.; Yang, S. Enhanced reduced-order extended state observer for motion control of differential driven mobile robot. IEEE Trans. Cybern. 2023, 53, 1299–1310. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Li, Z.; Xu, J. Design and control of a hand-launched fixed-wing unmanned aerial vehicle. IEEE Trans. Ind. Inf. 2023, 19, 3006–3016. [Google Scholar] [CrossRef]
- Yu, Z.; Yang, Z.; Sun, P.; Zhang, Y.; Jiang, B.; Su, C.-Y. Refined fault tolerant tracking control of fixed-wing UAVs via fractional calculus and interval type-2 fuzzy neural network under event-triggered communication. Inf. Sci. 2023, 644, 119276. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Liu, S.; Lv, M.; Deng, X. Event-triggered adaptive fault-tolerant synchronization tracking control for multiple 6-DOF fixed-wing UAVs. IEEE Trans. Veh. Technol. 2022, 71, 148–161. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Lv, M.; Liu, S. Distributed coordinated control for fixed-wing UAVs with dynamic event-triggered communication. IEEE Trans. Veh. Technol. 2022, 71, 4665–4676. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhao, D.; Zhu, Y. Event-triggered H∞ control for continuous-time nonlinear system via concurrent learning. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1071–1081. [Google Scholar] [CrossRef]
- Yu, H.; Hao, F. Input-to-state stability of integral-based event-triggered control for linear plants. Automatica 2017, 85, 248–255. [Google Scholar] [CrossRef]
- Yue, D.; Tian, E.; Han, Q.-L. A delay system method for designing event-triggered controllers of networked control systems. IEEE Trans. Autom. Control 2013, 58, 475–481. [Google Scholar] [CrossRef]
- Wang, J.; Xin, M. Integrated optimal formation control of multiple unmanned aerial vehicles. IEEE Trans. Control Syst. Technol. 2013, 21, 1731–1744. [Google Scholar] [CrossRef]
- Zhu, Z.; Xia, Y.; Fu, M. Attitude stabilization of rigid spacecraft with finite-time convergence. Int. J. Robust Nonlinear Control 2011, 21, 686–702. [Google Scholar] [CrossRef]
- Wang, H.; Chen, B.; Lin, C.; Sun, Y.; Wang, F. Adaptive finite-time control for a class of uncertain high-order non-linear systems based on fuzzy approximation. IET Control Theory Appl. 2017, 11, 677–684. [Google Scholar] [CrossRef]
- Yu, Y.; Yuan, Y.; Yang, H.; Liu, H. A novel event-triggered extended state observer for networked control systems subjected to external disturbances. Int. J. Robust Nonlinear Control 2019, 29, 2026–2040. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Performance Index | |||||
|---|---|---|---|---|---|---|
| Convergence Time | Triggered Ratio (%) | |||||
| 1 | 15 s | |||||
| 2 | 45 s | |||||
| 3 | >100 s | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Chen, J.; Zheng, Z.; Yuan, J. Distributed Finite-Time ESO-Based Consensus Control for Multiple Fixed-Wing UAVs Subjected to External Disturbances. Drones 2024, 8, 260. https://doi.org/10.3390/drones8060260
Yu Y, Chen J, Zheng Z, Yuan J. Distributed Finite-Time ESO-Based Consensus Control for Multiple Fixed-Wing UAVs Subjected to External Disturbances. Drones. 2024; 8(6):260. https://doi.org/10.3390/drones8060260
Chicago/Turabian StyleYu, Yang, Jianlin Chen, Zixuan Zheng, and Jianping Yuan. 2024. "Distributed Finite-Time ESO-Based Consensus Control for Multiple Fixed-Wing UAVs Subjected to External Disturbances" Drones 8, no. 6: 260. https://doi.org/10.3390/drones8060260