

Design and Characterization of an Active Cooling System for Temperature-Sensitive Sample Delivery Applications Using Unmanned Aerial Vehicles


Abstract
1. Introduction
2. Materials and Methods
3. Results and Discussion
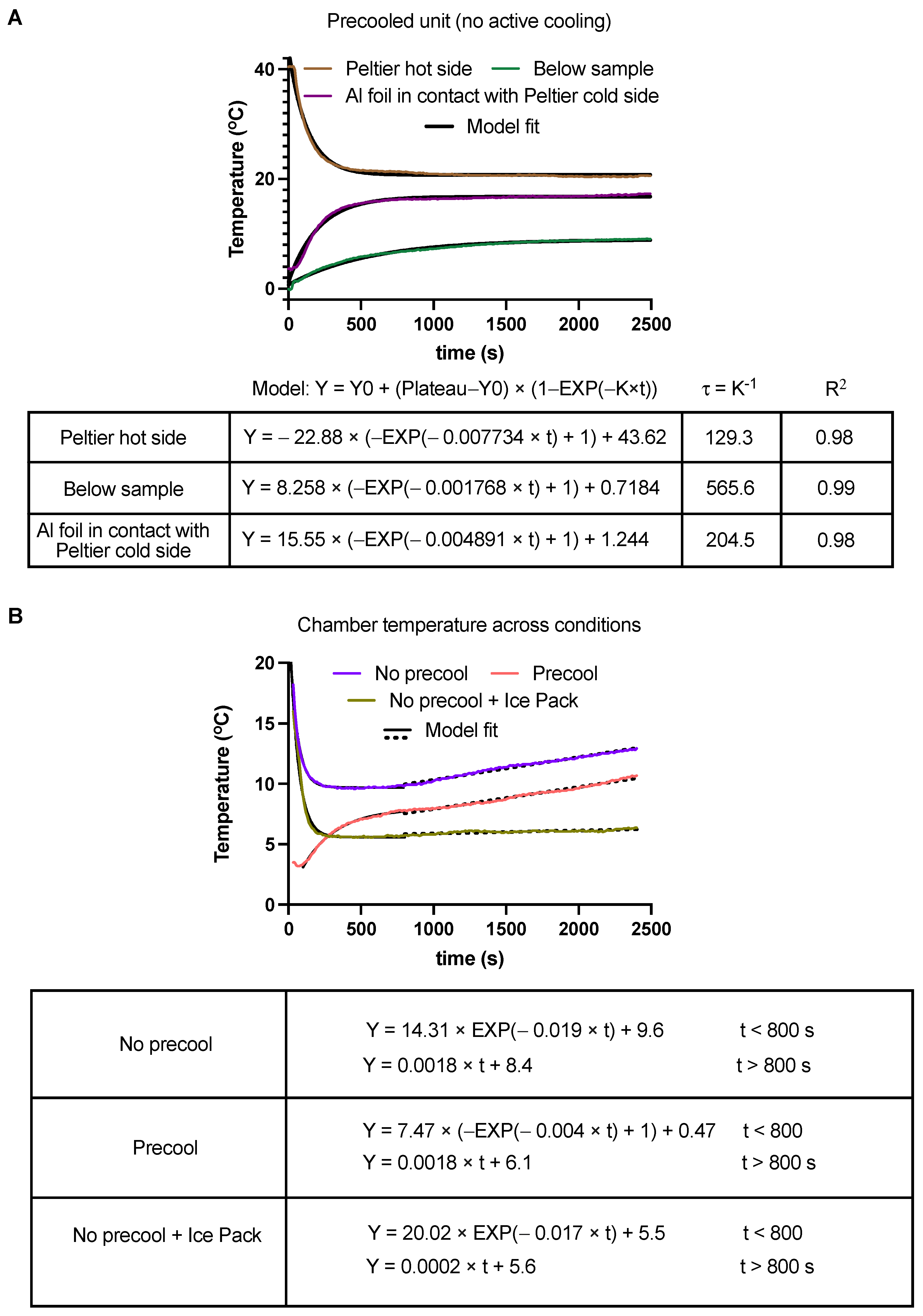
3.1. Performance with No Active Cooling
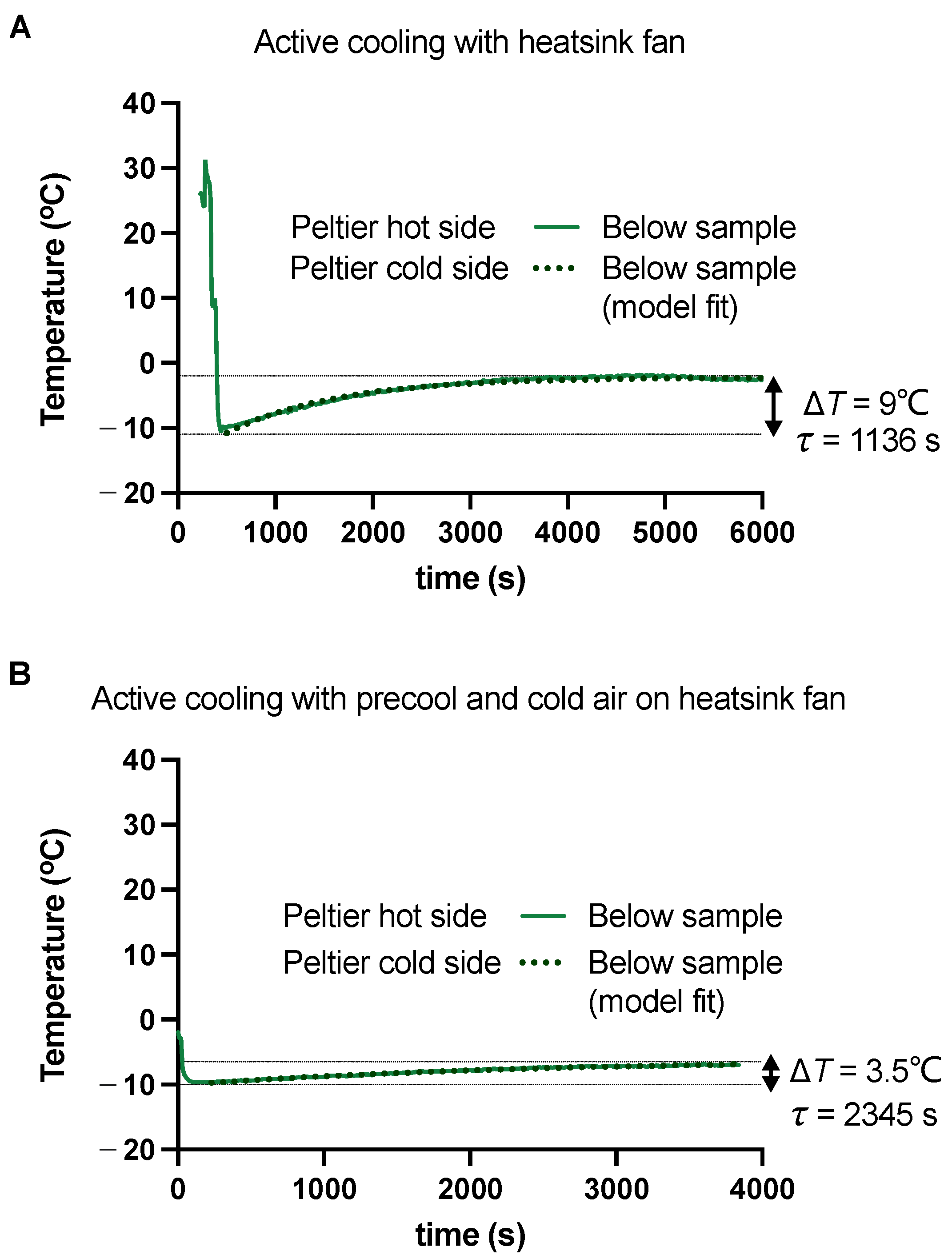
3.2. Performance with Active Cooling
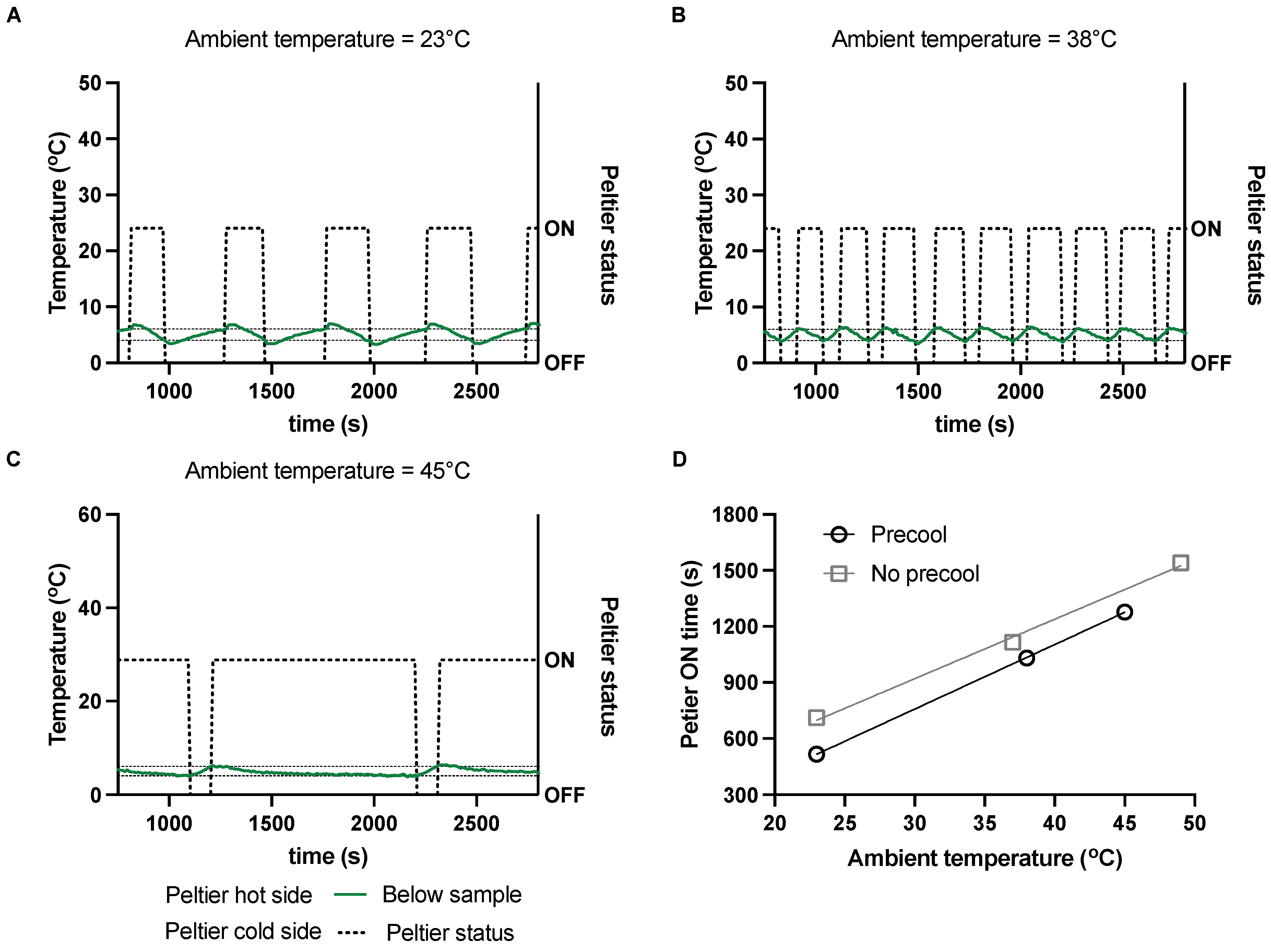
3.3. Feedback Control Operation for Precise Temperature Control and Reducing Power Consumption
3.4. Battery Capacity and Battery Weight Requirements for Drone Applications
4. Conclusions
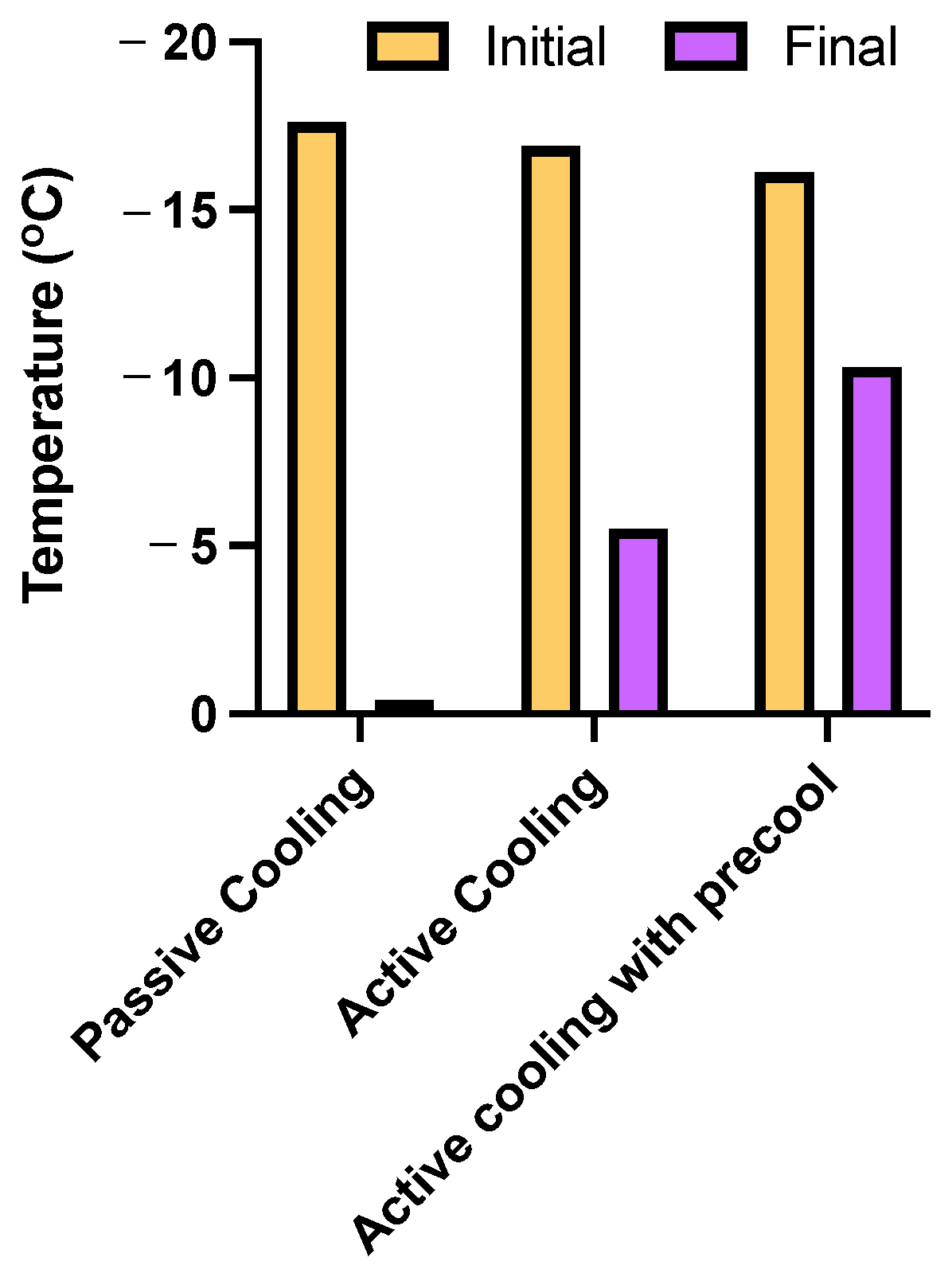
- In the absence of active cooling, simple thermal insulation from the cooling unit was not sufficient to maintain cold temperatures below 8 °C for more than 10 min. Precooling the chamber prior to operation or inclusion of an ice pack improved performance. However, neither of these passive cooling approaches enabled achieving temperatures below freezing and precise temperature control, thereby motivating the need for active cooling.
- Using the thermoelectric cooler, temperatures as low as −10 °C were achieved and below-freezing temperatures were sustained. As with passive cooling, precooling the chamber prior to operation improved the performance of the active cooling method.
- Using a lumped system model, the timescale of heat transfer in the system under different operating modes was characterized. Our data suggested that the timescale over which heat dissipation occurred nearly doubled when active cooling was used compared to passive cooling. The timescale increased further when the chamber was precooled and a cooler external ambient condition was presented.
- Upon characterization of the baseline active cooling performance of the system, our work focused on the demonstration of a practical operation scenario of the cooling system to maintain a cooling temperature within the range of 4 °C to 6 °C. To achieve this, a feedback control operation of the cooling unit was used and demonstrated, and the performance at different ambient conditions was characterized. Our observations suggested that the thermoelectric cooler needed to be turned ON for longer durations (and therefore, required higher charge capacity) to meet performance goals when the ambient conditions were warmer.
- To translate performance into system requirements, the required battery weight was related to the battery charging capacity using a linear relation based on manufacturer specifications. Our data suggested that the operation of the system at warmer ambient temperatures would also likely require higher battery weight as an additional payload, resulting from the need for additional charge capacity to achieve target cooling performance.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Advantages | Disadvantages | Benefit of Our Method | Refs. |
|---|---|---|---|---|
| Dry Ice |
|
|
| [16,25,26] |
| Conditioned Ice Packs |
|
|
| [17,18,22] |
| Refrigerated containers |
|
|
| [10,11,16] |
| Thermoelectric coolers |
|
|
| [29,31,33] and this study. |
Appendix B
| Specification | Value |
|---|---|
| Hot side temperature | 30 °C |
| 65 °C | |
| Maximum heat transfer | 51 W |
| Current | 6 A |
| Voltage | 15.4 V |
| Resistance | 2.07 Ω |
| Thermal conductivity | 1.5 Wm−1K−1 |
| Efficiency rating | 13–77% |
References
- Zaffran, M.; Vandelaer, J.; Kristensen, D.; Melgaard, B.; Yadav, P.; Antwi-Agyei, K.O.; Lasher, H. The Imperative for Stronger Vaccine Supply and Logistics Systems. Vaccine 2013, 31, B73–B80. [Google Scholar] [CrossRef] [PubMed]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Mohd Noor, N.; Abdullah, A.; Hashim, M. Remote Sensing UAV/Drones and Its Applications for Urban Areas: A Review. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012003. [Google Scholar] [CrossRef]
- Chan, K.W.; Nirmal, U.; Cheaw, W.G. Progress on Drone Technology and Their Applications: A Comprehensive Review. AIP Conf. Proc. 2018, 2030, 20308. [Google Scholar] [CrossRef]
- Dhote, J.; Limbourg, S. Designing Unmanned Aerial Vehicle Networks for Biological Material Transportation—The Case of Brussels. Comput. Ind. Eng. 2020, 148, 106652. [Google Scholar] [CrossRef]
- Hii, M.; Courtney, P.; Royall, P. An Evaluation of the Delivery of Medicines Using Drones. Drones 2019, 3, 52. [Google Scholar] [CrossRef]
- Amukele, T.K.; Sokoll, L.J.; Pepper, D.; Howard, D.P.; Street, J. Can Unmanned Aerial Systems (Drones) Be Used for the Routine Transport of Chemistry, Hematology, and Coagulation Laboratory Specimens? PLoS ONE 2015, 10, e0134020. [Google Scholar] [CrossRef]
- Geronel, R.S.; Begnini, G.R.; Botez, R.M.; Bueno, D.D. An Overview on the Use of Unmanned Aerial Vehicles for Medical Product Transportation: Flight Dynamics and Vibration Issues. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 349. [Google Scholar] [CrossRef]
- Theobald, K.; Zhu, W.; Waters, T.; Cherrett, T.; Oakey, A.; Royall, P.G. Stability of Medicines Transported by Cargo Drones: Investigating the Effects of Vibration from Multi-Stage Flight. Drones 2023, 7, 658. [Google Scholar] [CrossRef]
- Amukele, T.; Ness, P.M.; Tobian, A.A.R.; Boyd, J.; Street, J. Drone Transportation of Blood Products. Transfusion 2017, 57, 582–588. [Google Scholar] [CrossRef]
- Amukele, T.K.; Hernandez, J.; Snozek, C.L.; Wyatt, R.G.; Douglas, M.; Amini, R.; Street, J. Drone Transport of Chemistry and Hematology Samples Over Long Distances. Am. J. Clin. Pathol. 2017, 148, 427–435. [Google Scholar] [CrossRef]
- Prager, A.; Gu, K. Delivery of Temperature-Sensitive Items. U.S. Patent 11,410,114, 9 August 2022. [Google Scholar]
- Mangelsen, J.; Merchant, R. Aerial Delivery Packages. U.S. Patent 17/426,256, 24 March 2022. [Google Scholar]
- Cattin, M.; Jonnalagedda, S.; Makohliso, S.; Schönenberger, K. The Status of Refrigeration Solutions for Last Mile Vaccine Delivery in Low-Income Settings. Vaccine X 2022, 11, 100184. [Google Scholar] [CrossRef] [PubMed]
- Ghelichi, Z.; Gentili, M.; Mirchandani, P.B. Logistics for a Fleet of Drones for Medical Item Delivery: A Case Study for Louisville, KY. Comput. Oper. Res. 2021, 135, 105443. [Google Scholar] [CrossRef]
- Sham, R.; Siau, C.S.; Tan, S.; Kiu, D.C.; Sabhi, H.; Thew, H.Z.; Selvachandran, G.; Quek, S.G.; Ahmad, N.; Ramli, M.H.M. Drone Usage for Medicine and Vaccine Delivery during the COVID-19 Pandemic: Attitude of Health Care Workers in Rural Medical Centres. Drones 2022, 6, 109. [Google Scholar] [CrossRef]
- De Silvestri, S.; Capasso, P.J.; Gargiulo, A.; Molinari, S.; Sanna, A. Challenges for the Routine Application of Drones in Healthcare: A Scoping Review. Drones 2023, 7, 685. [Google Scholar] [CrossRef]
- De Silvestri, S.; Pagliarani, M.; Tomasello, F.; Trojaniello, D.; Sanna, A. Design of a Service for Hospital Internal Transport of Urgent Pharmaceuticals via Drones. Drones 2022, 6, 70. [Google Scholar] [CrossRef]
- Niglio, F.; Comite, P.; Cannas, A.; Pirri, A.; Tortora, G. Preliminary Clinical Validation of a Drone-Based Delivery System in Urban Scenarios Using a Smart Capsule for Blood. Drones 2022, 6, 195. [Google Scholar] [CrossRef]
- Kostin, A.S.; Silin, Y.A. Development of an Insulated Container for the Implementation of the Delivery of Special Cargo Using an Unmanned Aerial System. In Proceedings of the 2022 Wave Electronics and its Application in Information and Telecommunication Systems (WECONF), St. Petersburg, Russia, 30 May–3 June 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–4. [Google Scholar]
- Liu, R.; Pitruzzello, G.; Rosa, M.; Battisti, A.; Cerri, C.; Tortora, G. Towards an Innovative Sensor in Smart Capsule for Aerial Drones for Blood and Blood Component Delivery. Micromachines 2022, 13, 1664. [Google Scholar] [CrossRef]
- Peltier, G.C.; Meledeo, M.A. The Impact of Delivery by a Fixed-Wing, Sling-Launched Unmanned Aerial Vehicle on the Hematologic Function of Whole Blood. J. Trauma Acute Care Surg. 2023, 95, S152–S156. [Google Scholar] [CrossRef]
- Ganesan, G.S.; Mokayef, M. Multi-Purpose Medical Drone for the Use in Pandemic Situation. In Proceedings of the 2021 IEEE Microwave Theory and Techniques in Wireless Communications (MTTW), Riga, Latvia, 7–8 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 188–192. [Google Scholar]
- Blount, W. Temperature Controlled Transport of Vaccines by Drone in Developing Countries; Georgia Institute of Technology: Atlanta, GA, USA, 2018. [Google Scholar]
- Saponi, M.; Borboni, A.; Adamini, R.; Faglia, R.; Amici, C. Embedded Payload Solutions in UAVs for Medium and Small Package Delivery. Machines 2022, 10, 737. [Google Scholar] [CrossRef]
- Sykes, C. Time-and Temperature-Controlled Transport: Supply Chain Challenges and Solutions. Pharm. Ther. 2018, 43, 154. [Google Scholar]
- Buidin, T.I.C.; Mariasiu, F. Battery Thermal Management Systems: Current Status and Design Approach of Cooling Technologies. Energies 2021, 14, 4879. [Google Scholar] [CrossRef]
- Enescu, D.; Virjoghe, E.O. A Review on Thermoelectric Cooling Parameters and Performance. Renew. Sustain. Energy Rev. 2014, 38, 903–916. [Google Scholar] [CrossRef]
- Sharma, S.; Dwivedi, V.K.; Pandit, S.N. A Review of Thermoelectric Devices for Cooling Applications. Int. J. Green Energy 2014, 11, 899–909. [Google Scholar] [CrossRef]
- Ivanov, K.; Belovski, I.; Aleksandrov, A. Design, Building and Study of a Small-Size Portable Thermoelectric Refrigerator for Vaccines. In Proceedings of the 2021 17th Conference on Electrical Machines, Drives and Power Systems (ELMA), Sofia, Bulgaria, 1–4 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–4. [Google Scholar]
- Pamula, G.; Pamula, L.; Pamula, V. Mini Freezer-Equipped Drone for Transporting Biological Materials and Method of Using Same. U.S. Patent 18/213,149, 19 October 2023. [Google Scholar]
- Sankaran, V.; Alagumariappan, P.; Esakki, B.; Choi, J.; Hameed, M.T.K.S.; Pittu, P.S.K.R. Devising an Internet of Things-Based Healthcare Medical Container for the Transportation of Organs and Healthcare Products Using Unmanned Aerial Vehicles. In Proceedings of the ECSA 2023, Online, 15–30 November 2023; MDPI: Basel Switzerland, 2023; Volume 58, p. 16. [Google Scholar]
- International Council for Harmonisation International Conference on Harmonisation (ICH). Guidance for Industry: Q1A(R2) Stability Testing of New Drug Substances and Products. ICH Harmon. Tripart. Guidel. 2003, 4, 24. [Google Scholar]
- Amicone, D.; Cannas, A.; Marci, A.; Tortora, G. A Smart Capsule Equipped with Artificial Intelligence for Autonomous Delivery of Medical Material through Drones. Appl. Sci. 2021, 11, 7976. [Google Scholar] [CrossRef]
- Lee, S.; Kwon, Y. Development of Drone Cargo Bay with Real-Time Temperature Control. World J. Eng. Technol. 2019, 07, 612–621. [Google Scholar] [CrossRef]
- Available online: https://www.Updwg.Org/Md3/?Action=filter (accessed on 1 April 2024).
- Swoop Aero. Available online: https://swoop.Aero (accessed on 1 April 2024).
- Zipline. Available online: https://www.Flyzipline.com (accessed on 1 April 2024).
- Nellis, G.; Klein, S. Heat Transfer; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Sidebotham, G. Heat Transfer Modeling; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Peter, A.J.; Balaji, D.; Gowrishankar, D. Waste Heat Energy Harvesting Using Thermo Electric Generator. IOSR J. Eng. 2013, 3, 1–4. [Google Scholar] [CrossRef]
- Harun, M.H.; Azmi, M.W.N.; Aras, M.S.M.; Azlan, U.A.A.; Azahar, A.H.; Annuar, K.A.M.; Halim, M.F.M.A.; Yaakub, M.F.; Abidin, A.F.Z. A Study on the Potential of Peltier in Generating Electricity Using Heat Loss at Engine and Exhaust Vehicle. J. Adv. Res. Fluid Mech. Therm. Sci. 2018, 49, 77–84. [Google Scholar]
- Sari, H.N.; Arsana, I.M.; Bramantyo, K.U.; Cholik, M.; Kurniawan, W.D.; Wijanarko, D.V. Performance Analysis of Electric Coolers TEC1-12706 and TEC1-12715 with Heatsinks at Semi-Conductor Cooler Boxes. In Proceedings of the International Joint Conference on Science and Engineering 2022 (IJCSE 2022), Surabaya, Indonesia, 10–11 September 2022; Agustin, H.P., De Oliveira, A.M., Anistyasari, Y., Ueda, K., Wardhono, A., Rahayu, I.A.T., Eds.; Atlantis Press International BV: Dordrecht, The Netherlands, 2022; pp. 281–292, ISBN 978-94-6463-099-2. [Google Scholar]
- Wang, C.; Calderón, C.; Wang, Y.D. An Experimental Study of a Thermoelectric Heat Exchange Module for Domestic Space Heating. Energy Build. 2017, 145, 1–21. [Google Scholar] [CrossRef]
- Hebei IT Co., Ltd. Thermoelectric Cooler TEC1-12706; Hebei IT Co., Ltd.: Shanghai, China, 2017; Volume 31, p. 2017. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pamula, G.; Pamula, L.; Ramachandran, A. Design and Characterization of an Active Cooling System for Temperature-Sensitive Sample Delivery Applications Using Unmanned Aerial Vehicles. Drones 2024, 8, 270. https://doi.org/10.3390/drones8060270
Pamula G, Pamula L, Ramachandran A. Design and Characterization of an Active Cooling System for Temperature-Sensitive Sample Delivery Applications Using Unmanned Aerial Vehicles. Drones. 2024; 8(6):270. https://doi.org/10.3390/drones8060270
Chicago/Turabian StylePamula, Ganapathi, Lakshmi Pamula, and Ashwin Ramachandran. 2024. "Design and Characterization of an Active Cooling System for Temperature-Sensitive Sample Delivery Applications Using Unmanned Aerial Vehicles" Drones 8, no. 6: 270. https://doi.org/10.3390/drones8060270
APA StylePamula, G., Pamula, L., & Ramachandran, A. (2024). Design and Characterization of an Active Cooling System for Temperature-Sensitive Sample Delivery Applications Using Unmanned Aerial Vehicles. Drones, 8(6), 270. https://doi.org/10.3390/drones8060270