
ID-Det: Insulator Burst Defect Detection from UAV Inspection Imagery of Power Transmission Facilities

 ,
,  ,
,
Abstract
:1. Introduction
- Insulator Segmentation Network (ISNet) is proposed to achieve insulator segmentation from cluttered background. The performance of insulator segmentation far exceeds that of the Baseline method, and the edges of the segmentation result are refined.
- Insulator Burst Detector (IBD) is proposed based on corner point detection and periodic feature distribution of corner points to realize insulator burst detection and localization in transmission lines. The experimental results show that IBD achieves robust and better detection and localization of insulator bursts compared to direct detectors based on deep learning.
- An Insulator Defect Dataset (ID dataset) with 1614 insulator instances is constructed for experiment. ISNet achieves edge-refined insulator segmentation results with a 27.2% improvement in AP compared to baseline [15]. The proposed insulator defect detection framework ID-Det achieves 97.27% accuracy, 97.38% precision, and 94.56% recall on the ID dataset and outperforms the general object detection-based methods.
2. Related Work
2.1. UAV Power Inspection
2.2. Insulator Defect Detection
2.2.1. Object Detection-Based Methods
2.2.2. Segmentation-Based Methods
3. Methodology
3.1. Insulator Segmentation Network (ISNet)
3.1.1. Insulator Clipping Module (ICM)
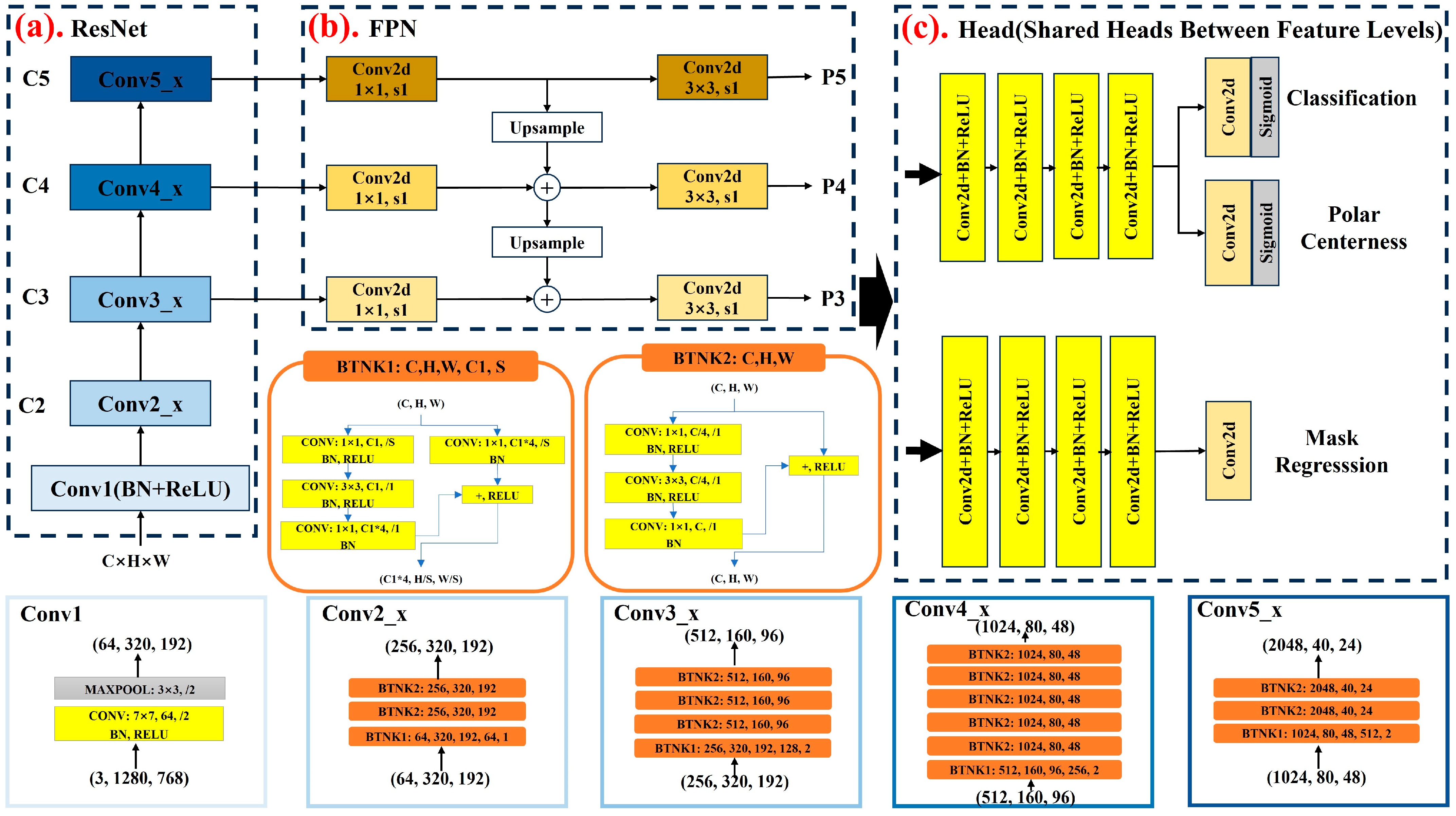
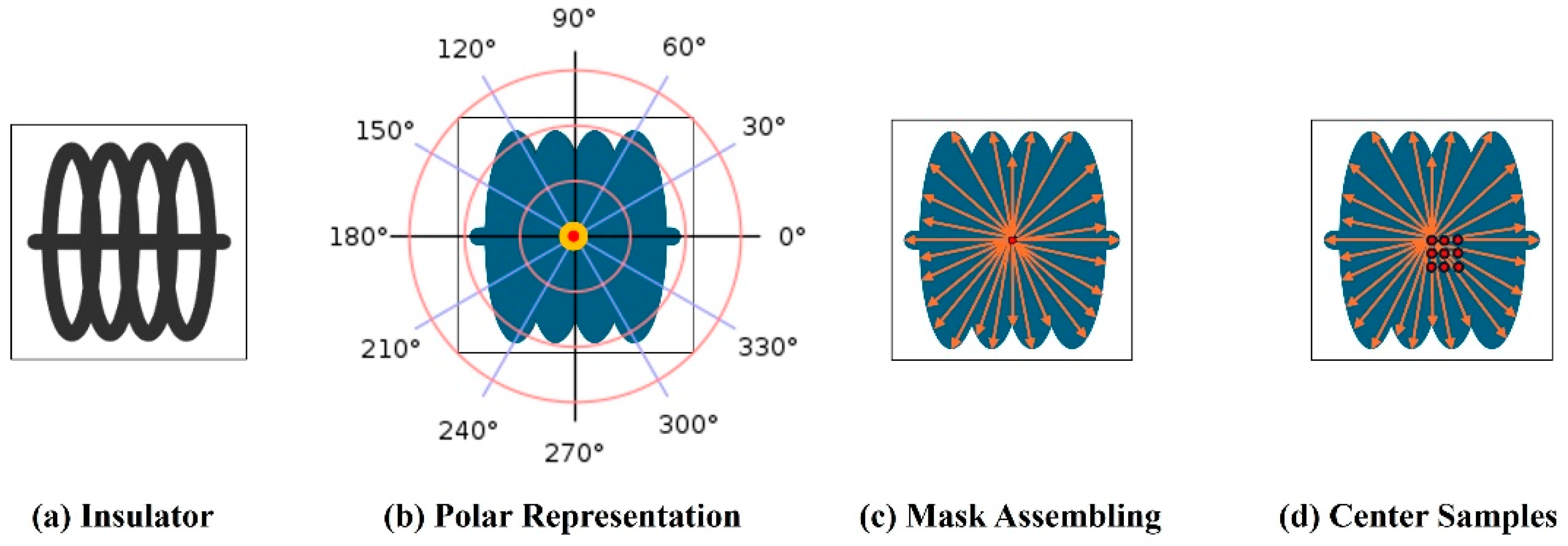
3.1.2. Backbone Network Structure and Insulator Polar Representation
3.2. Insulator Burst Detector (IBD) Based on Periodic Distribution of Corner Points
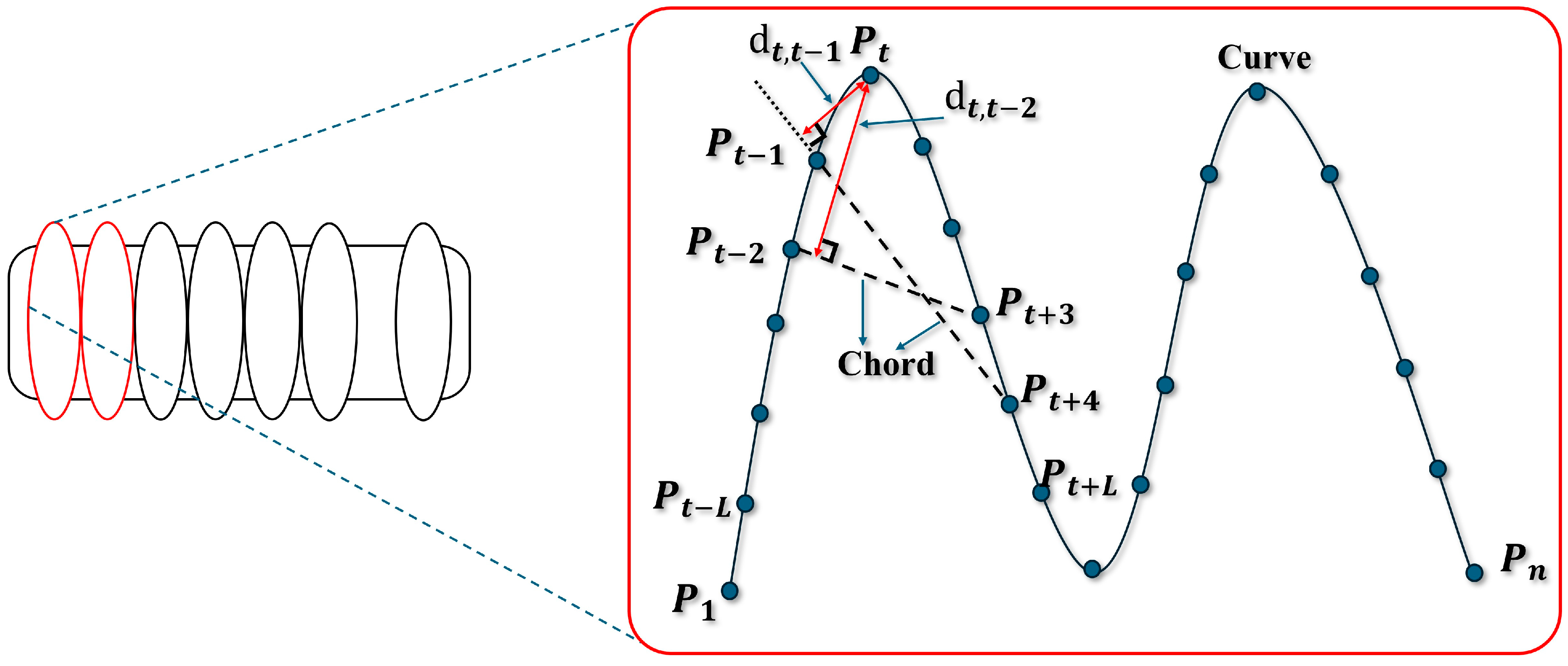
3.2.1. Corner Point Extraction
3.2.2. Distance-Based Clustering
3.2.3. Periodic Distribution Feature Discriminator
| Algorithm 1: Insulator Burst Detector | |||
| Input: Insulator Mask | |||
| 1 | corner point set from FAST_CPDA () | ||
| 2 | main direction line parameter from | ||
| 3 | distance from main direction line parameter and corner point set P0 | ||
| 4 | four distances from in do | ||
| 5 | four corner point groups from and | ||
| 6 | for | Point in | |
| 7 | distance set from every two adjacent points in | ||
| 8 | average distance from | ||
| 9 | Set threshold | ||
| 10 | for | L in | |
| 11 | Check if there is an L > | ||
| 12 | if | TRUE then | |
| 13 | mark the corresponding two adjacent points in | ||
| 14 | end | ||
| 15 | defect points set from | ||
| 16 | return: | ||
4. Experiments and Results
4.1. Experiment Setup
4.1.1. ID Dataset
4.1.2. Server Configuration
4.1.3. Training Details
4.2. Ablation Experiment
4.2.1. Qualitative Evaluation
4.2.2. Quantitative Evaluation
4.3. Insulator Burst Detection
4.3.1. Qualitative Evaluation
4.3.2. Quantitative Evaluation
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- International Energy Agency. World Energy Outlook 2023. 2023. Available online: https://www.iea.org/reports/world-energy-outlook-2023 (accessed on 24 October 2023).
- Zhang, N.; Dai, H.; Wang, Y.; Zhang, Y.; Yang, Y. Power System Transition in China under the Coordinated Development of Power Sources, Network, Demand Response, and Energy Storage. WIREs Energy Environ. 2021, 10, e392. [Google Scholar] [CrossRef]
- Liu, J.; Hu, M.; Dong, J.; Lu, X. Summary of Insulator Defect Detection Based on Deep Learning. Electron. Power Syst. Res. 2023, 224, 109688. [Google Scholar] [CrossRef]
- Yang, L.; Fan, J.; Liu, Y.; Li, E.; Peng, J.; Liang, Z. A Review on State-of-the-Art Power Line Inspection Techniques. IEEE Trans. Instrum. Meas. 2020, 69, 9350–9365. [Google Scholar] [CrossRef]
- Cong, Y.; Chen, C.; Yang, B.; Li, J.; Wu, W.; Li, Y.; Yang, Y. 3D-CSTM: A 3D Continuous Spatio-Temporal Mapping Method. ISPRS J. Photogramm. Remote Sens. 2022, 186, 232–245. [Google Scholar] [CrossRef]
- Ma, R.; Chen, C.; Yang, B.; Li, D.; Wang, H.; Cong, Y.; Hu, Z. CG-SSD: Corner Guided Single Stage 3D Object Detection from LiDAR Point Cloud. ISPRS J. Photogramm. Remote Sens. 2022, 191, 33–48. [Google Scholar] [CrossRef]
- Wu, W.; Li, J.; Chen, C.; Yang, B.; Zou, X.; Yang, Y.; Xu, Y.; Zhong, R.; Chen, R. AFLI-Calib: Robust LiDAR-IMU Extrinsic Self-Calibration Based on Adaptive Frame Length LiDAR Odometry. ISPRS J. Photogramm. Remote Sens. 2023, 199, 157–181. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, C.; Wang, Z.; Yang, B.; Wu, W.; Li, L.; Wu, J.; Zhao, L. Pmlio: Panoramic Tightly-Coupled Multi-Lidar-Inertial Odometry and Mapping. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2023, X-1/W1-2023, 703–708. [Google Scholar] [CrossRef]
- Wang, H.; Chen, C.; He, Y.; Sun, S.; Li, L.; Xu, Y.; Yang, B. Easy Rocap: A Low-Cost and Easy-to-Use Motion Capture System for Drones. Drones 2024, 8, 137. [Google Scholar] [CrossRef]
- Chen, C.; Jin, A.; Wang, Z.; Zheng, Y.; Yang, B.; Zhou, J.; Xu, Y.; Tu, Z. SGSR-Net: Structure Semantics Guided LiDAR Super-Resolution Network for Indoor LiDAR SLAM. IEEE Trans. Multimed. 2024, 26, 1842–1854. [Google Scholar] [CrossRef]
- Wu, W.; Chen, C.; Yang, B. LuoJia-Explorer: Unmanned Collaborative Localization and Mapping System. In Proceedings of the 3rd 2023 International Conference on Autonomous Unmanned Systems (3rd ICAUS 2023), Nanjing, China, 8–11 September 2023; Qu, Y., Gu, M., Niu, Y., Fu, W., Eds.; Lecture Notes in Electrical Engineering. Springer Nature Singapore: Singapore, 2024; Volume 1176, pp. 66–75, ISBN 978-981-9710-98-0. [Google Scholar]
- Wang, Y.; Qin, X.; Jia, W.; Lei, J.; Wang, D.; Feng, T.; Zeng, Y.; Song, J. Multiobjective Energy Consumption Optimization of a Flying–Walking Power Transmission Line Inspection Robot during Flight Missions Using Improved NSGA-II. Appl. Sci. 2024, 14, 1637. [Google Scholar] [CrossRef]
- Nguyen, V.N.; Jenssen, R.; Roverso, D. Intelligent Monitoring and Inspection of Power Line Components Powered by UAVs and Deep Learning. IEEE Power Energy Technol. Syst. J. 2019, 6, 11–21. [Google Scholar] [CrossRef]
- Luo, Y.; Yu, X.; Yang, D.; Zhou, B. A Survey of Intelligent Transmission Line Inspection Based on Unmanned Aerial Vehicle. Artif. Intell. Rev. 2023, 56, 173–201. [Google Scholar] [CrossRef]
- Xie, E.; Sun, P.; Song, X.; Wang, W.; Liang, D.; Shen, C.; Luo, P. PolarMask: Single Shot Instance Segmentation with Polar Representation. arXiv 2020, arXiv:1909.13226. [Google Scholar]
- Yang, B.; Chen, C. Automatic Registration of UAV-Borne Sequent Images and LiDAR Data. ISPRS J. Photogramm. Remote Sens. 2015, 101, 262–274. [Google Scholar] [CrossRef]
- Chen, C.; Yang, B.; Song, S.; Peng, X.; Huang, R. Automatic Clearance Anomaly Detection for Transmission Line Corridors Utilizing UAV-Borne LIDAR Data. Remote Sens. 2018, 10, 613. [Google Scholar] [CrossRef]
- Kähler, O.; Hochstöger, S.; Kemper, G.; Birchbauer, J. Automating Powerline Inspection: A Novel Multisensor System for Data Analysis Using Deep Learning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B4-2020, 747–754. [Google Scholar] [CrossRef]
- Avila, J.; Brouwer, T. Indoor Autonomous Powerline Inspection Model. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3 October 2021; pp. 1–5. [Google Scholar]
- Guan, H.; Sun, X.; Su, Y.; Hu, T.; Wang, H.; Wang, H.; Peng, C.; Guo, Q. UAV-Lidar Aids Automatic Intelligent Powerline Inspection. Int. J. Electron. Power Energy Syst. 2021, 130, 106987. [Google Scholar] [CrossRef]
- Vemula, S.; Marquez, S.; Avila, J.D.; Brouwer, T.A.; Frye, M. A Heterogeneous Autonomous Collaborative System for Powerline Inspection Using Human-Robotic Teaming. In Proceedings of the 2021 16th International Conference of System of Systems Engineering (SoSE), Västerås, Sweden, 14 June 2021; pp. 19–24. [Google Scholar]
- Wang, B.; Gu, Q. A Detection Method for Transmission Line Insulators Based on an Improved FCM Algorithm. Telkomnika 2015, 13, 164. [Google Scholar] [CrossRef]
- Wronkowicz, A. Vision Diagnostics of Power Transmission Lines: Approach to Recognition of Insulators. In Proceedings of the 9th International Conference on Computer Recognition Systems CORES 2015, Wroclaw, Poland, 25–27 May 2015; Burduk, R., Jackowski, K., Kurzyński, M., Woźniak, M., Żołnierek, A., Eds.; Advances in Intelligent Systems and Computing. Springer International Publishing: Cham, Switzerland, 2016; Volume 403, pp. 431–440, ISBN 978-3-319-26225-3. [Google Scholar]
- Zhang, K.; Yang, L. Insulator Segmentation Algorithm Based on K-Means. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 4747–4751. [Google Scholar]
- Gao, Z.; Yang, G.; Li, E.; Shen, T.; Wang, Z.; Tian, Y.; Wang, H.; Liang, Z. Insulator Segmentation for Power Line Inspection Based on Modified Conditional Generative Adversarial Network. J. Sens. 2019, 2019, 1–8. [Google Scholar] [CrossRef]
- Tan, J. Automatic Insulator Detection for Power Line Using Aerial Images Powered by Convolutional Neural Networks. J. Phys. Conf. Ser. 2021, 1748, 042012. [Google Scholar] [CrossRef]
- Zou, Z.; Chen, K.; Shi, Z.; Guo, Y.; Ye, J. Object Detection in 20 Years: A Survey. Proc. IEEE 2023, 111, 257–276. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. arXiv 2016, arXiv:1612.08242. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Ultralytics/Yolov5: YOLOv5 🚀 in PyTorch > ONNX > CoreML > TFLite. Available online: https://github.com/ultralytics/yolov5 (accessed on 13 March 2024).
- Li, C.; Li, L.; Jiang, H.; Weng, K.; Geng, Y.; Li, L.; Ke, Z.; Li, Q.; Cheng, M.; Nie, W.; et al. YOLOv6: A Single-Stage Object Detection Framework for Industrial Applications. arXiv 2022, arXiv:2209.02976. [Google Scholar]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors. In Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023; pp. 7464–7475. [Google Scholar]
- Ultralytics/Ultralytics: NEW-YOLOv8 🚀 in PyTorch > ONNX > OpenVINO > CoreML > TFLite. Available online: https://github.com/ultralytics/ultralytics (accessed on 13 March 2024).
- Wang, C.-Y.; Yeh, I.-H.; Liao, H.-Y.M. YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information. arXiv 2024, arXiv:2402.13616. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision–ECCV 2020; Springer: Berlin/Heidelberg, Germany, 2016; Volume 9905, pp. 21–37. [Google Scholar]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. arXiv 2018, arXiv:1708.02002. [Google Scholar]
- Law, H.; Deng, J. CornerNet: Detecting Objects as Paired Keypoints. Int. J. Comput. Vis. 2020, 128, 642–656. [Google Scholar] [CrossRef]
- Duan, K.; Bai, S.; Xie, L.; Qi, H.; Huang, Q.; Tian, Q. CenterNet: Keypoint Triplets for Object Detection. arXiv 2019, arXiv:1904.08189. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-End Object Detection with Transformers. In Computer Vision–ECCV 2020; Vedaldi, A., Bischof, H., Brox, T., Frahm, J.-M., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2020; Volume 12346, pp. 213–229. ISBN 978-3-030-58451-1. [Google Scholar]
- Zhao, Y.; Lv, W.; Xu, S.; Wei, J.; Wang, G.; Dang, Q.; Liu, Y.; Chen, J. DETRs Beat YOLOs on Real-Time Object Detection. arXiv 2024, arXiv:2304.08069. [Google Scholar]
- Prates, R.M.; Cruz, R.; Marotta, A.P.; Ramos, R.P.; Simas Filho, E.F.; Cardoso, J.S. Insulator Visual Non-Conformity Detection in Overhead Power Distribution Lines Using Deep Learning. Comput. Electron. Eng. 2019, 78, 343–355. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, C.; Zhang, Z.; Zhu, Y.; Lin, H.; Zhang, Z.; Sun, Y.; He, T.; Mueller, J.; Manmatha, R.; et al. ResNeSt: Split-Attention Networks. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), New Orleans, LA, USA, 19–20 June 2022; pp. 2735–2745. [Google Scholar]
- Wang, S.; Liu, Y.; Qing, Y.; Wang, C.; Lan, T.; Yao, R. Detection of Insulator Defects with Improved ResNeSt and Region Proposal Network. IEEE Access 2020, 8, 184841–184850. [Google Scholar] [CrossRef]
- Tao, X.; Zhang, D.; Wang, Z.; Liu, X.; Zhang, H.; Xu, D. Detection of Power Line Insulator Defects Using Aerial Images Analyzed with Convolutional Neural Networks. IEEE Trans. Syst. Man Cybern Syst. 2020, 50, 1486–1498. [Google Scholar] [CrossRef]
- Liu, C.; Wu, Y.; Liu, J.; Sun, Z.; Xu, H. Insulator Faults Detection in Aerial Images from High-Voltage Transmission Lines Based on Deep Learning Model. Appl. Sci. 2021, 11, 4647. [Google Scholar] [CrossRef]
- Yi, W.; Ma, S.; Li, R. Insulator and Defect Detection Model Based on Improved Yolo-S. IEEE Access 2023, 11, 93215–93226. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, Y.; Xin, M.; Liao, J.; Xie, Q. A Light-Weight Network for Small Insulator and Defect Detection Using UAV Imaging Based on Improved YOLOv5. Sensors 2023, 23, 5249. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Fu, Z.; Cheng, X.; Wang, F. An Method for Power Lines Insulator Defect Detection with Attention Feedback and Double Spatial Pyramid. Electron. Power Syst. Res. 2023, 218, 109175. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2015; Volume 9351, pp. 234–241. ISBN 978-3-319-24573-7. [Google Scholar]
- Chen, L.-C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Semantic Image Segmentation with Deep Convolutional Nets and Fully Connected CRFs. arXiv 2016, arXiv:1412.7062. [Google Scholar]
- Chen, L.-C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.-C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking Atrous Convolution for Semantic Image Segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]
- Chen, L.-C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. In Computer Vision–ECCV 2018; Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2018; Volume 11211, pp. 833–851. ISBN 978-3-030-01233-5. [Google Scholar]
- Hümmer, C.; Schwonberg, M.; Zhou, L.; Cao, H.; Knoll, A.; Gottschalk, H. VLTSeg: Simple Transfer of CLIP-Based Vision-Language Representations for Domain Generalized Semantic Segmentation. arXiv 2023, arXiv:2312.02021. [Google Scholar]
- Wan, Q.; Huang, Z.; Kang, B.; Feng, J.; Zhang, L. Harnessing Diffusion Models for Visual Perception with Meta Prompts. arXiv 2023, arXiv:2312.14733. [Google Scholar]
- Cordts, M.; Omran, M.; Ramos, S.; Rehfeld, T.; Enzweiler, M.; Benenson, R.; Franke, U.; Roth, S.; Schiele, B. The Cityscapes Dataset for Semantic Urban Scene Understanding. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3213–3223. [Google Scholar]
- Bolya, D.; Zhou, C.; Xiao, F.; Lee, Y.J. YOLACT: Real-Time Instance Segmentation. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9156–9165. [Google Scholar]
- Wang, X.; Kong, T.; Shen, C.; Jiang, Y.; Li, L. SOLO: Segmenting Objects by Locations. In Computer Vision–ECCV 2020; Vedaldi, A., Bischof, H., Brox, T., Frahm, J.-M., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2020; Volume 12363, pp. 649–665. ISBN 978-3-030-58522-8. [Google Scholar]
- Wang, X.; Zhang, R.; Kong, T.; Li, L.; Shen, C. SOLOv2: Dynamic and Fast Instance Segmentation. Adv. Neural Inf. Process. Syst. 2020, 33, 17721–17732. [Google Scholar]
- Chen, X.; Girshick, R.; He, K.; Dollar, P. TensorMask: A Foundation for Dense Object Segmentation. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 2061–2069. [Google Scholar]
- Ke, L.; Danelljan, M.; Li, X.; Tai, Y.-W.; Tang, C.-K.; Yu, F. Mask Transfiner for High-Quality Instance Segmentation. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 4402–4411. [Google Scholar]
- Liu, Z.; Hu, H.; Lin, Y.; Yao, Z.; Xie, Z.; Wei, Y.; Ning, J.; Cao, Y.; Zhang, Z.; Dong, L.; et al. Swin Transformer V2: Scaling up Capacity and Resolution. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 11999–12009. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer Using Shifted Windows. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 11–17 October 2021; pp. 9992–10002. [Google Scholar]
- Zuo, D.; Hu, H.; Qian, R.; Liu, Z. An Insulator Defect Detection Algorithm Based on Computer Vision. In Proceedings of the 2017 IEEE International Conference on Information and Automation (ICIA), Macau, China, 18–20 July 2017; pp. 361–365. [Google Scholar]
- Cheng, H.; Zhai, Y.; Chen, R.; Wang, D.; Dong, Z.; Wang, Y. Self-Shattering Defect Detection of Glass Insulators Based on Spatial Features. Energies 2019, 12, 543. [Google Scholar] [CrossRef]
- Li, X.; Su, H.; Liu, G. Insulator Defect Recognition Based on Global Detection and Local Segmentation. IEEE Access 2020, 8, 59934–59946. [Google Scholar] [CrossRef]
- Liu, W.; Liu, Z.; Wang, H.; Han, Z. An Automated Defect Detection Approach for Catenary Rod-Insulator Textured Surfaces Using Unsupervised Learning. IEEE Trans. Instrum. Meas. 2020, 69, 8411–8423. [Google Scholar] [CrossRef]
- Alahyari, A.; Hinneck, A.; Tariverdizadeh, R.; Pozo, D. Segmentation and Defect Classification of the Power Line Insulators: A Deep Learning-Based Approach. In Proceedings of the 2020 International Conference on Smart Grids and Energy Systems (SGES), Perth, Australia, 23–26 November 2020; pp. 476–481. [Google Scholar]
- Antwi-Bekoe, E.; Liu, G.; Ainam, J.-P.; Sun, G.; Xie, X. A Deep Learning Approach for Insulator Instance Segmentation and Defect Detection. Neural Comput. Appl. 2022, 34, 7253–7269. [Google Scholar] [CrossRef]
- Guo, J.; Li, T.; Du, B. Segmentation Head Networks with Harnessing Self-Attention and Transformer for Insulator Surface Defect Detection. Appl. Sci. 2023, 13, 9109. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. arXiv 2016, arXiv:1511.00561. [Google Scholar] [CrossRef] [PubMed]
- Romera, E.; Alvarez, J.M.; Bergasa, L.M.; Arroyo, R. ERFNet: Efficient Residual Factorized ConvNet for Real-Time Semantic Segmentation. IEEE Trans. Intell. Transport. Syst. 2018, 19, 263–272. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An Image Is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv 2021, arXiv:2010.11929. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully Convolutional One-Stage Object Detection. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9626–9635. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Lin, T.-Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar]
- Awrangjeb, M.; Lu, G.; Fraser, C.S.; Ravanbakhsh, M. A Fast Corner Detector Based on the Chord-to-Point Distance Accumulation Technique. In Proceedings of the 2009 Digital Image Computing: Techniques and Applications, Melbourne, Australia, 1–3 December 2009; pp. 519–525. [Google Scholar]
- Han, J.H.; Poston, T. Chord-to-Point Distance Accumulation and Planar Curvature: A New Approach to Discrete Curvature. Pattern Recognit. Lett. 2001, 22, 1133–1144. [Google Scholar] [CrossRef]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
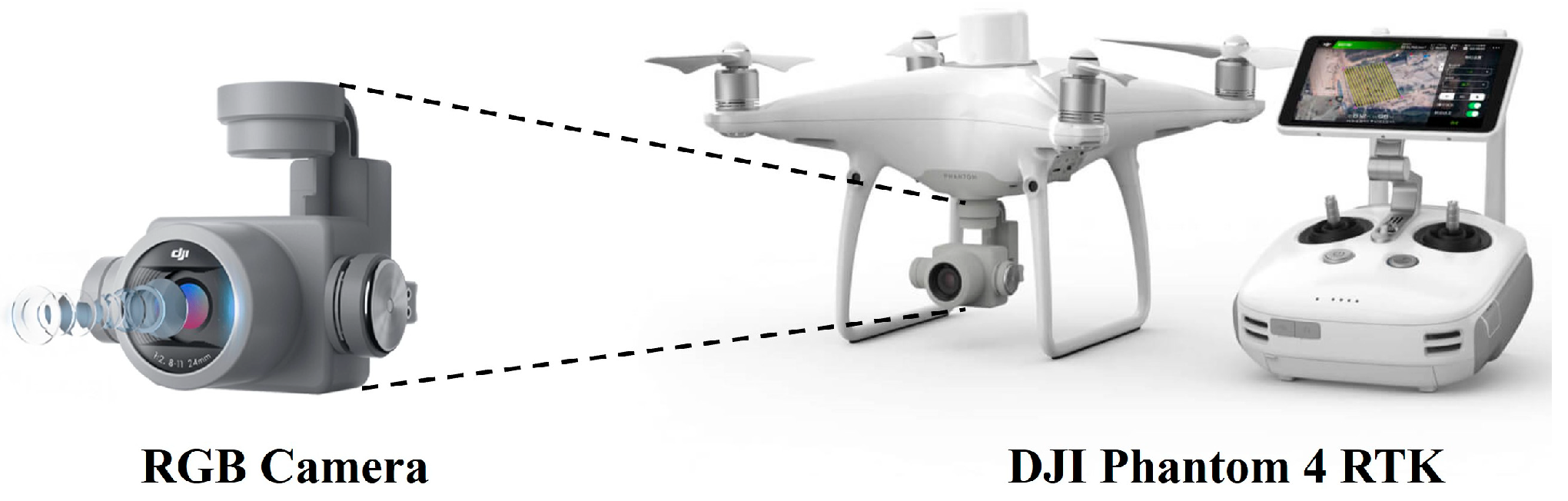
- DJI Phantom 4 rtk-DJI Innovations. Available online: https://enterprise.dji.com/cn/photo (accessed on 22 June 2024).
- Xie, X.; Liu, Z.; Xu, C.; Zhang, Y. A Multiple Sensors Platform Method for Power Line Inspection Based on a Large Unmanned Helicopter. Sensors 2017, 17, 1222. [Google Scholar] [CrossRef] [PubMed]
- Mojahed, A. Alimojahed/Insulator-Instance-Segmentation. 2023. Available online: https://Github.Com/Alimojahed/Insulator-Instance-Segmentation (accessed on 28 October 2023).
- Li, W.; Liu, W.; Zhu, J.; Cui, M.; Yu, R.; Hua, X.; Zhang, L. Box2Mask: Box-Supervised Instance Segmentation via Level-Set Evolution. 2022. arXiv 2022, arXiv:2212.01579. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Name | Type | Methodology | Feature |
|---|---|---|---|---|
| 2019 | Prates’ method [44] | Detection-Based | Non-Conformity Detection | Simple and lightweight model |
| 2020 | Wang’s method [46] | Detection-Based | ResNeSt-based Method | High accuracy |
| 2020 | Tao’s method [47] | Detection-Based | Cascade Method | Data augmentation to adapt to complex backgrounds |
| 2021 | CSPD-YOLO [48] | Detection-Based | YOLOv3-based Method | High accuracy |
| 2023 | Yi’s method [49] | Detection-Based | YOLO-S-based Method | Lightweight and high speed |
| 2023 | Zhang’s method [50] | Detection-Based | YOLOv5-based Method | Lightweight and high speed |
| 2023 | Chen’s method [51] | Detection-Based | Attention Feedback-based Method | Adapting to complex backgrounds |
| 2017 | Zuo’s method [67] | Segmentation-Based | Filter-based Method | Simple traditional image processing-based method |
| 2019 | Cheng’s method [68] | Segmentation-Based | Spatial Features-based Method | High accuracy |
| 2020 | Li’s method [69] | Segmentation-Based | Defect Recognition Method | Segmenting defect areas individually |
| 2020 | Liu’s method [70] | Segmentation-Based | Unsupervised Method | Improving the ambiguity of the edges of the recovered images |
| 2020 | Alahyari’s method [71] | Segmentation-Based | Two-stage Method | Two-stage and simple model |
| 2022 | Antwi-Bekoe’s method [72] | Segmentation-Based | Attention-based Method | High accuracy |
| 2023 | HST-Net [73] | Segmentation-Based | Harnessing self-attention and transformer | Adapting to complex backgrounds |
| 2024 | Ours (ID-Det) | Segmentation-Based | Insulator Segmentation Network (ISNet) and Insulator Burst Detector (IBD) | Fine edge segmentation, high precision, lightweight model, potential for application |
| Method | AP (segm) | AP50 (segm) | AP75 (segm) | APS (segm) | APM (segm) | APL (segm) |
|---|---|---|---|---|---|---|
| Baseline | 0.303 | 0.709 | 0.24 | 0 | 0.1 | 0.32 |
| Baseline with PCA Module | 0.477 | 0.949 | 0.362 | 0.3 | 0.256 | 0.497 |
| Baseline with Chips Module | 0.466 | 0.861 | 0.389 | 0.181 | 0.407 | 0.498 |
| Baseline with PCA Module and Chips Module | 0.575 (27.2%↑) | 0.914 (20.5%↑) | 0.687 (44.7%↑) | 0.128 (12.8%↑) | 0.545 (44.5%↑) | 0.693 (37.3%↑) |
| Method | AP (bbox) | AP50 (bbox) | AP75 (bbox) | APS (bbox) | APM (bbox) | APL (bbox) |
|---|---|---|---|---|---|---|
| Baseline | 0.858 | 0.868 | 0.868 | 0 | 0.85 | 0.863 |
| Baseline with PCA Module | 0.973 | 0.98 | 0.98 | 0.8 | 0.433 | 0.997 |
| Baseline with Chips Module | 0.867 | 0.889 | 0.886 | 0.566 | 0.658 | 0.956 |
| Baseline with PCA Module and Chips Module | 0.911 (5.3%↑) | 0.949 (8.1%↑) | 0.915 (4.7%↑) | 0.419 (41.9%↑) | 0.989 (13.9%↑) | 0.999 (13.6%↑) |
| Method | AR (segm) | ARS (segm) | ARM (segm) | ARL (segm) |
|---|---|---|---|---|
| Baseline | 0.377 | 0 | 0.15 | 0.384 |
| Baseline with PCA Module | 0.524 | 0.3 | 0.4 | 0.54 |
| Baseline with Chips Module | 0.55 | 0.212 | 0.546 | 0.547 |
| Baseline with PCA Module and Chips Module | 0.602 (22.5%↑) | 0.204 (20.4%↑) | 0.585 (43.5%↑) | 0.703 (31.9%↑) |
| Method | AR (bbox) | ARS (bbox) | ARM (bbox) | ARL (bbox) |
|---|---|---|---|---|
| Baseline | 0.98 | 0 | 0.85 | 0.983 |
| Baseline with PCA Module | 0.991 | 0.8 | 0.867 | 0.998 |
| Baseline with Chips Module | 0.961 | 0.575 | 0.864 | 0.987 |
| Baseline with PCA Module and Chips Module | 0.944 (−3.6%↑) | 0.603 (60.3%↑) | 0.994 (14.4%↑) | 0.999 (1.6%↑) |
| Method | Total Quantity | Number of Defective Insulators | TP | FP | TN | FN | Accuracy | Precision | Recall |
|---|---|---|---|---|---|---|---|---|---|
| ID-Det | 1614 | 551 | 521 | 14 | 1049 | 30 | 97.27% | 97.38% | 94.56% |
| Method | Accuracy | Precision | Recall | Segmentation /Detection Speed (ms) | Corner Extraction Speed (ms) | Defect Detection Speed (ms) |
|---|---|---|---|---|---|---|
| YOLOv5 [33] | 85.068% | 92.12% | 61.525% | 17.7 | - | - |
| YOLOv7 [35] | 91.078% | 90.946% | 82.033% | 31.3 | - | - |
| YOLOv8 [36] | 91.326% | 88.555% | 85.662% | 39.5 | - | - |
| YOLOv9 [37] | 90.892% | 88.550% | 84.211% | 49.8 | - | - |
| Swin transformer [66] | 92.937% | 87.737% | 92.196% | 394.1 | - | - |
| ID-Det | 97.27% | 97.38% | 94.56% | 213.8 | 44.0 | 231.7 |
| Method | AP | AP50 | AP75 | APS | APM | APL |
|---|---|---|---|---|---|---|
| Box2Mask [86] (segm) | 0.193 | 0.598 | 0.069 | 0.200 | 0.275 | 0.200 |
| Ours (ISNet) (segm) | 0.575 (38.2%↑) | 0.914 (31.6%↑) | 0.687 (61.8%↑) | 0.128 (−7.2%↑) | 0.545 (27.0%↑) | 0.693 (49.3%↑) |
| Box2Mask [86] (bbox) | 0.847 | 0.850 | 0.850 | 0.900 | 0.808 | 0.851 |
| Ours (ISNet) (bbox) | 0.911 (6.4%↑) | 0.949 (9.9%↑) | 0.915 (6.5%↑) | 0.419 (−48.1%↑) | 0.989 (18.1%↑) | 0.999 (14.8%↑) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, S.; Chen, C.; Yang, B.; Yan, Z.; Wang, Z.; He, Y.; Wu, S.; Li, L.; Fu, J. ID-Det: Insulator Burst Defect Detection from UAV Inspection Imagery of Power Transmission Facilities. Drones 2024, 8, 299. https://doi.org/10.3390/drones8070299
Sun S, Chen C, Yang B, Yan Z, Wang Z, He Y, Wu S, Li L, Fu J. ID-Det: Insulator Burst Defect Detection from UAV Inspection Imagery of Power Transmission Facilities. Drones. 2024; 8(7):299. https://doi.org/10.3390/drones8070299
Chicago/Turabian StyleSun, Shangzhe, Chi Chen, Bisheng Yang, Zhengfei Yan, Zhiye Wang, Yong He, Shaolong Wu, Liuchun Li, and Jing Fu. 2024. "ID-Det: Insulator Burst Defect Detection from UAV Inspection Imagery of Power Transmission Facilities" Drones 8, no. 7: 299. https://doi.org/10.3390/drones8070299
APA StyleSun, S., Chen, C., Yang, B., Yan, Z., Wang, Z., He, Y., Wu, S., Li, L., & Fu, J. (2024). ID-Det: Insulator Burst Defect Detection from UAV Inspection Imagery of Power Transmission Facilities. Drones, 8(7), 299. https://doi.org/10.3390/drones8070299