
Attitude Control of a Mass-Actuated Fixed-Wing UAV Based on Adaptive Global Fast Terminal Sliding Mode Control


Abstract
1. Introduction
2. Mathematical Model and Dynamic Characteristics
2.1. MMC Strategy
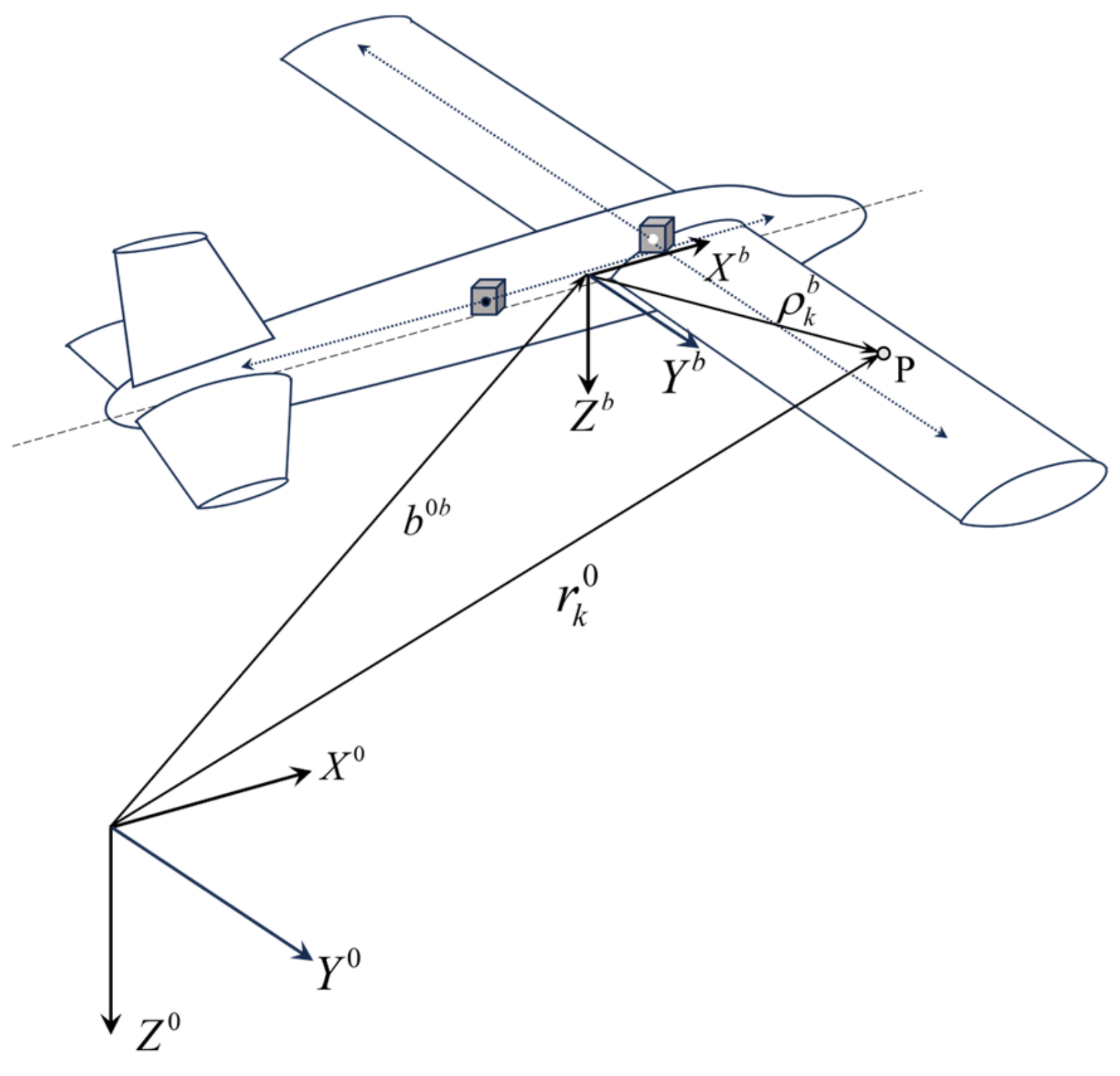
2.2. Motion Model
2.3. Dynamic Model
2.4. Open-Loop Simulation
3. Design of the Controller
3.1. Design of FTESO
3.1.1. Preliminaries
3.1.2. Design of the Observer
3.2. Design of AGFTSMC Based on PPC
- ;
- The closed-loop system remains stable.
3.2.1. GFTSM Control Strategy
3.2.2. PPC Section
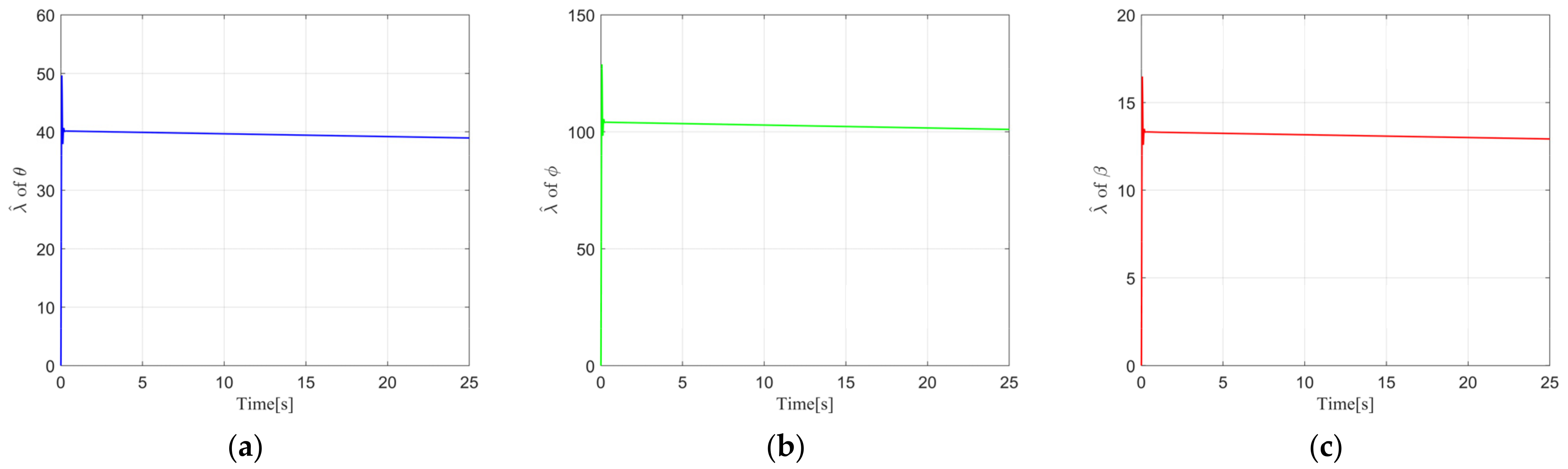
3.2.3. Adaptive Control Component
3.2.4. Stability Analysis of the Controller
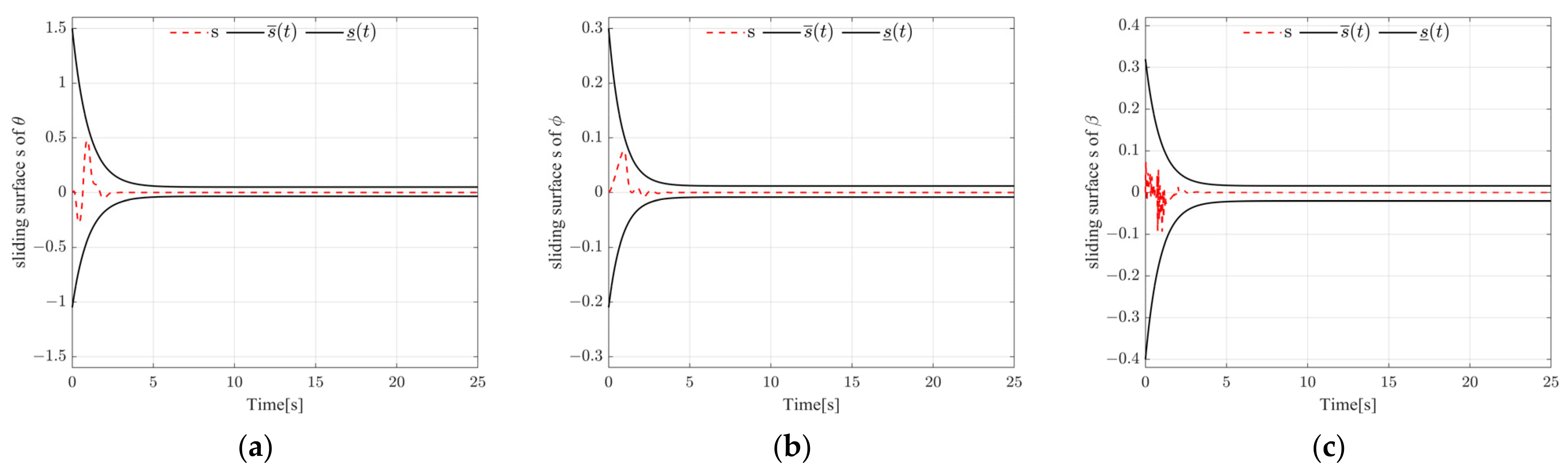
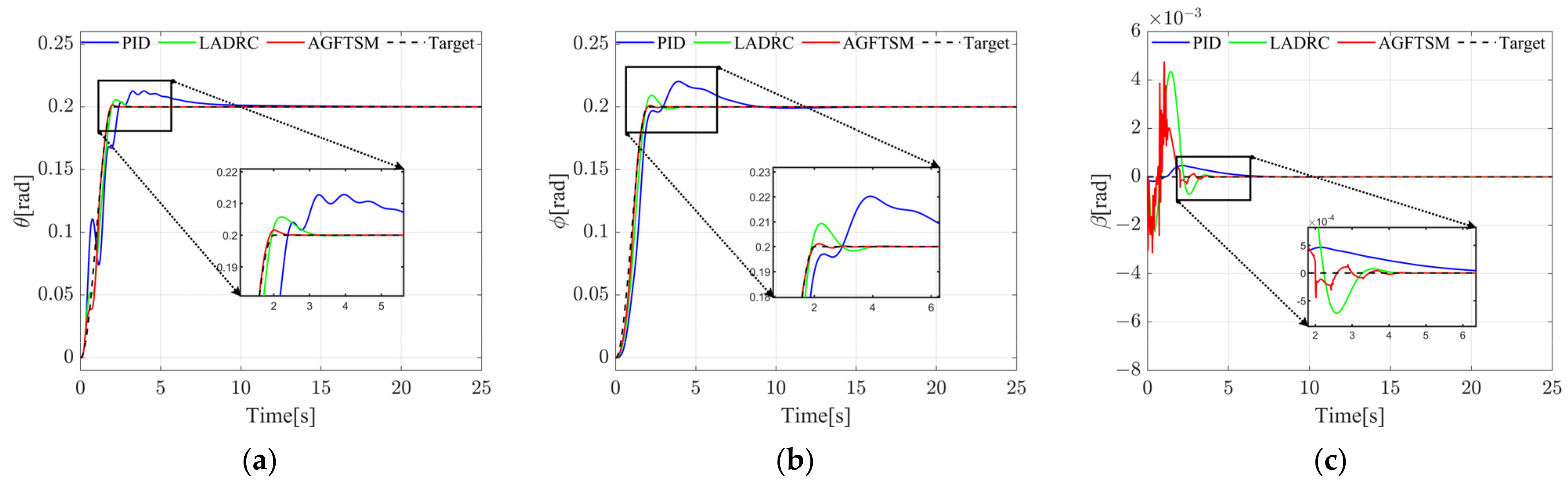
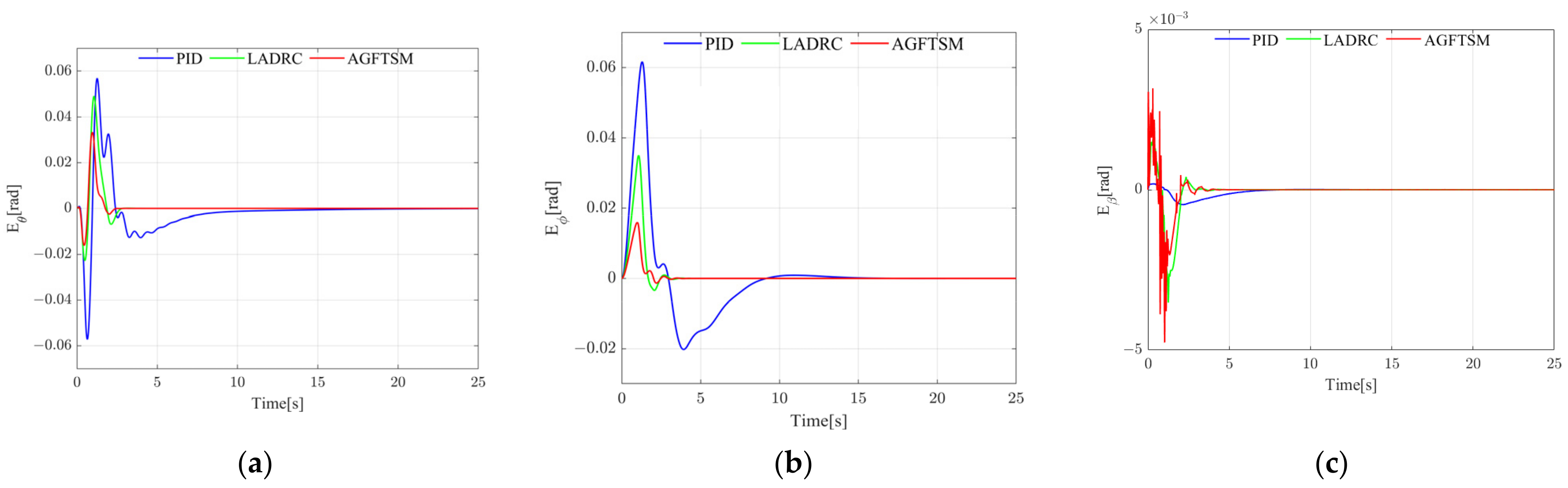
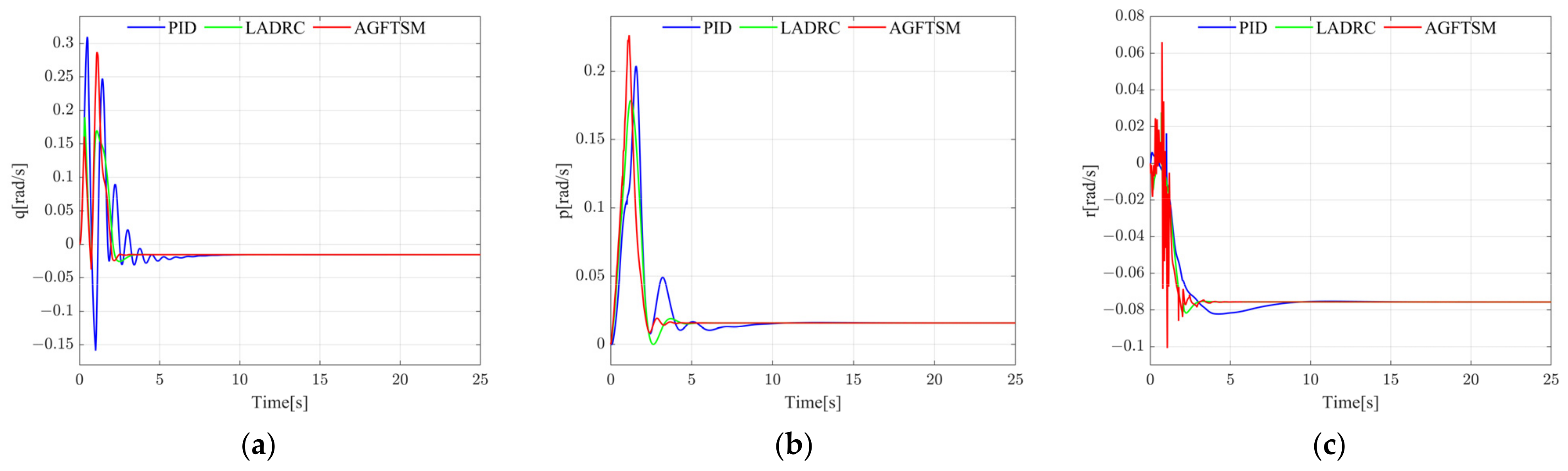
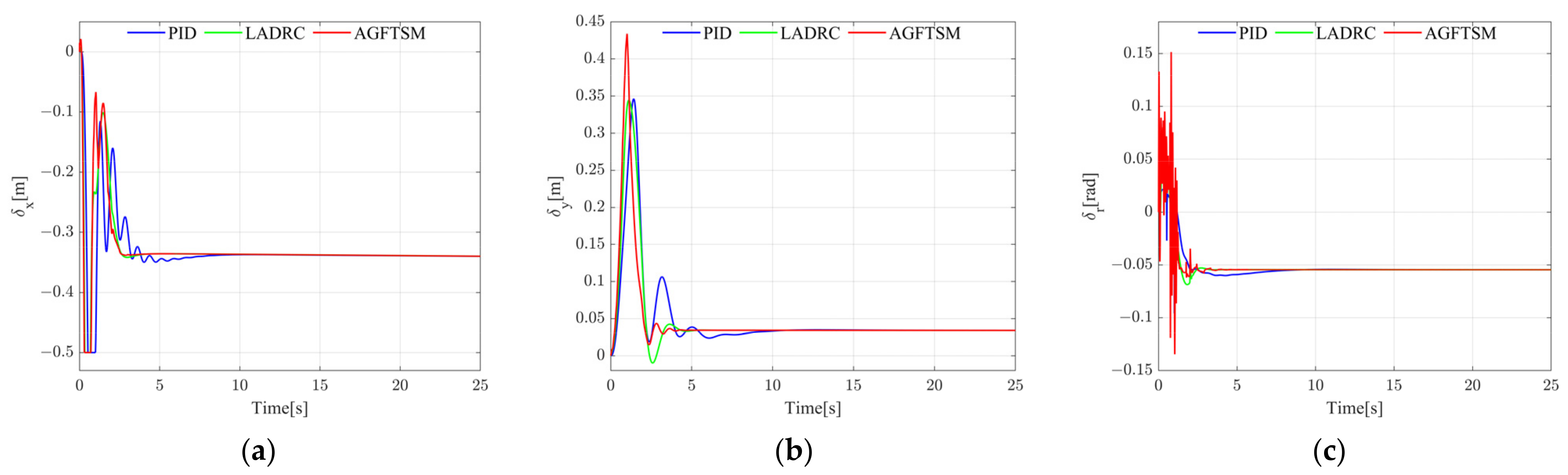
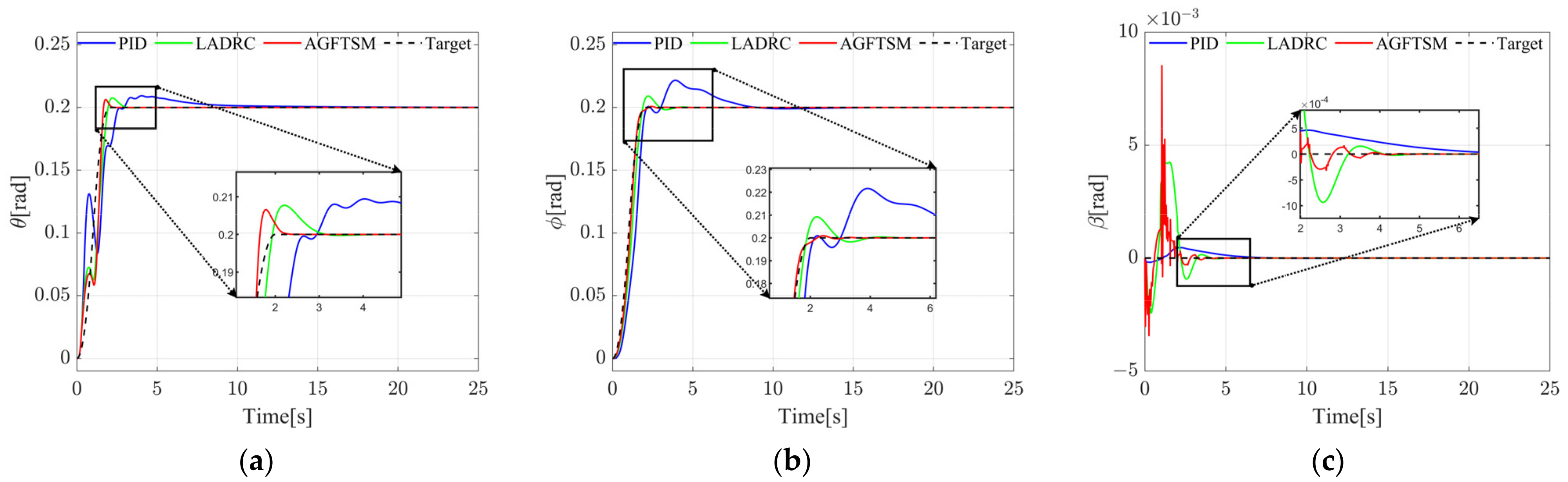
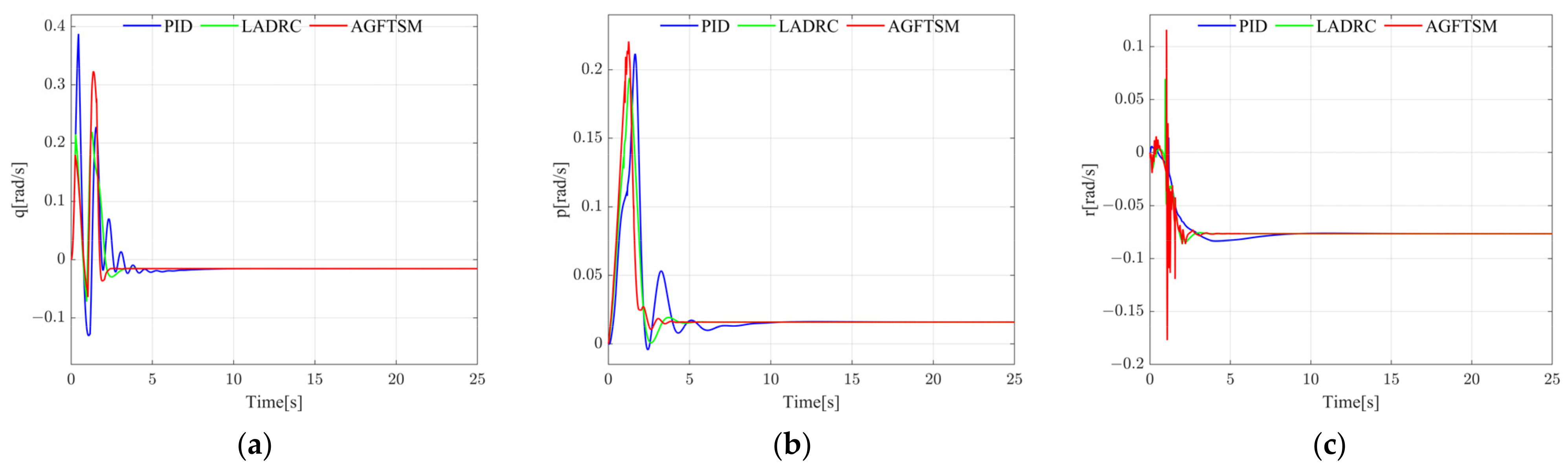
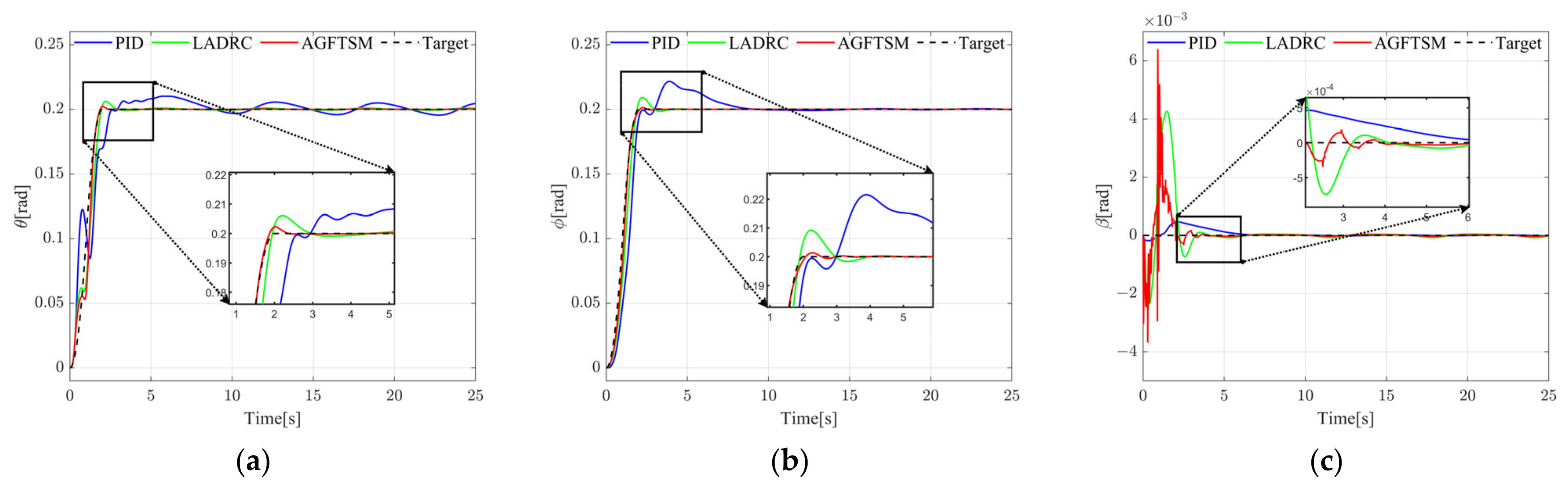
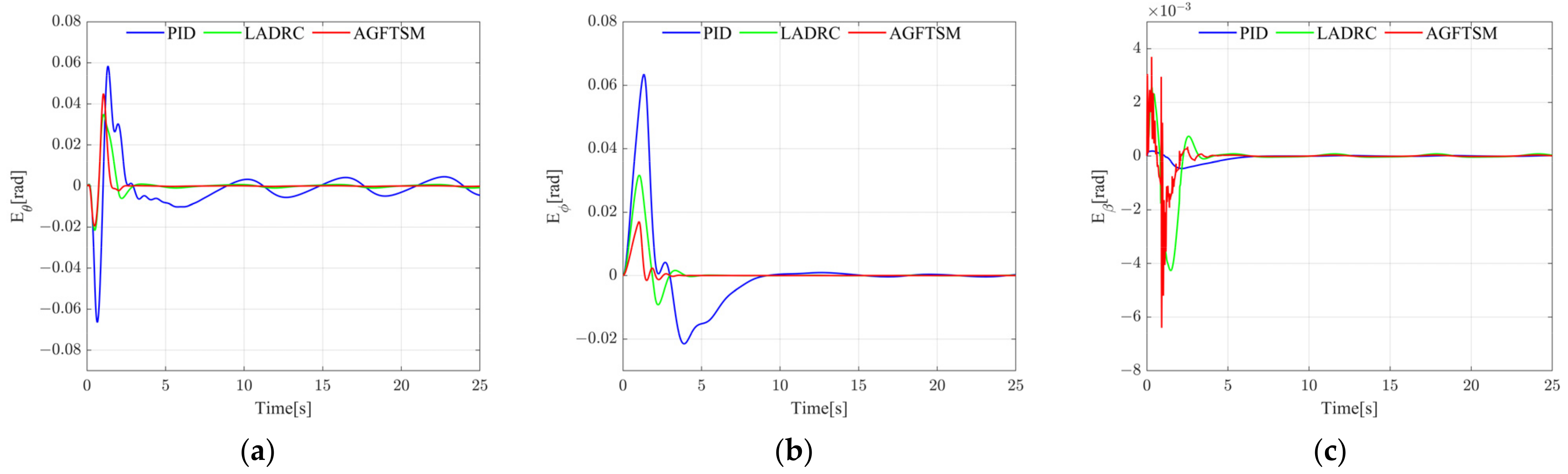
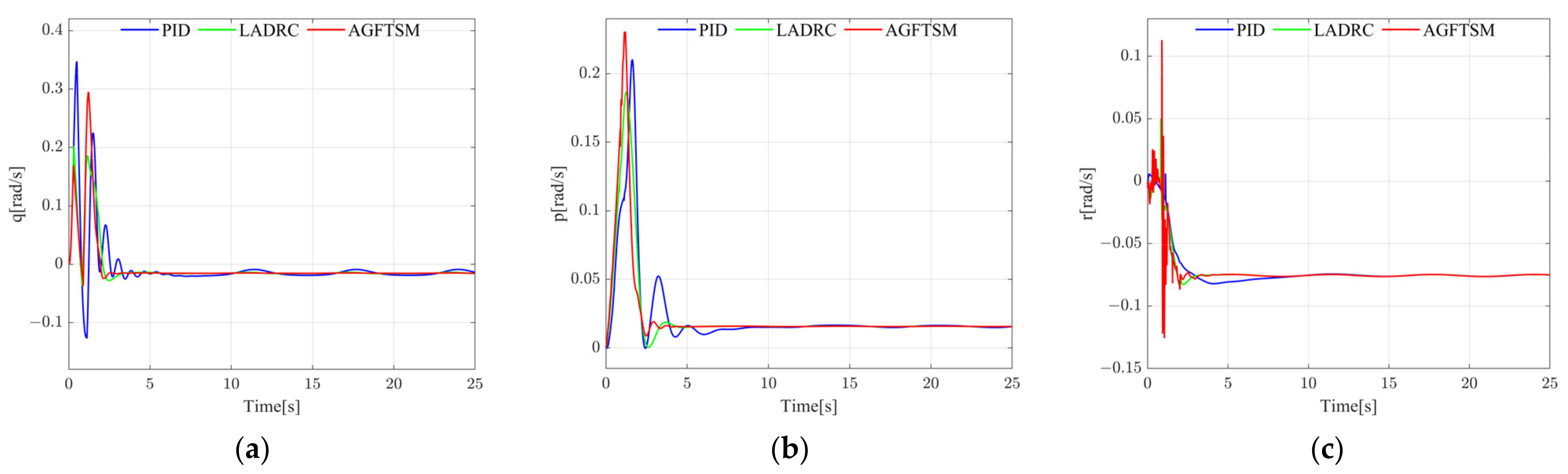
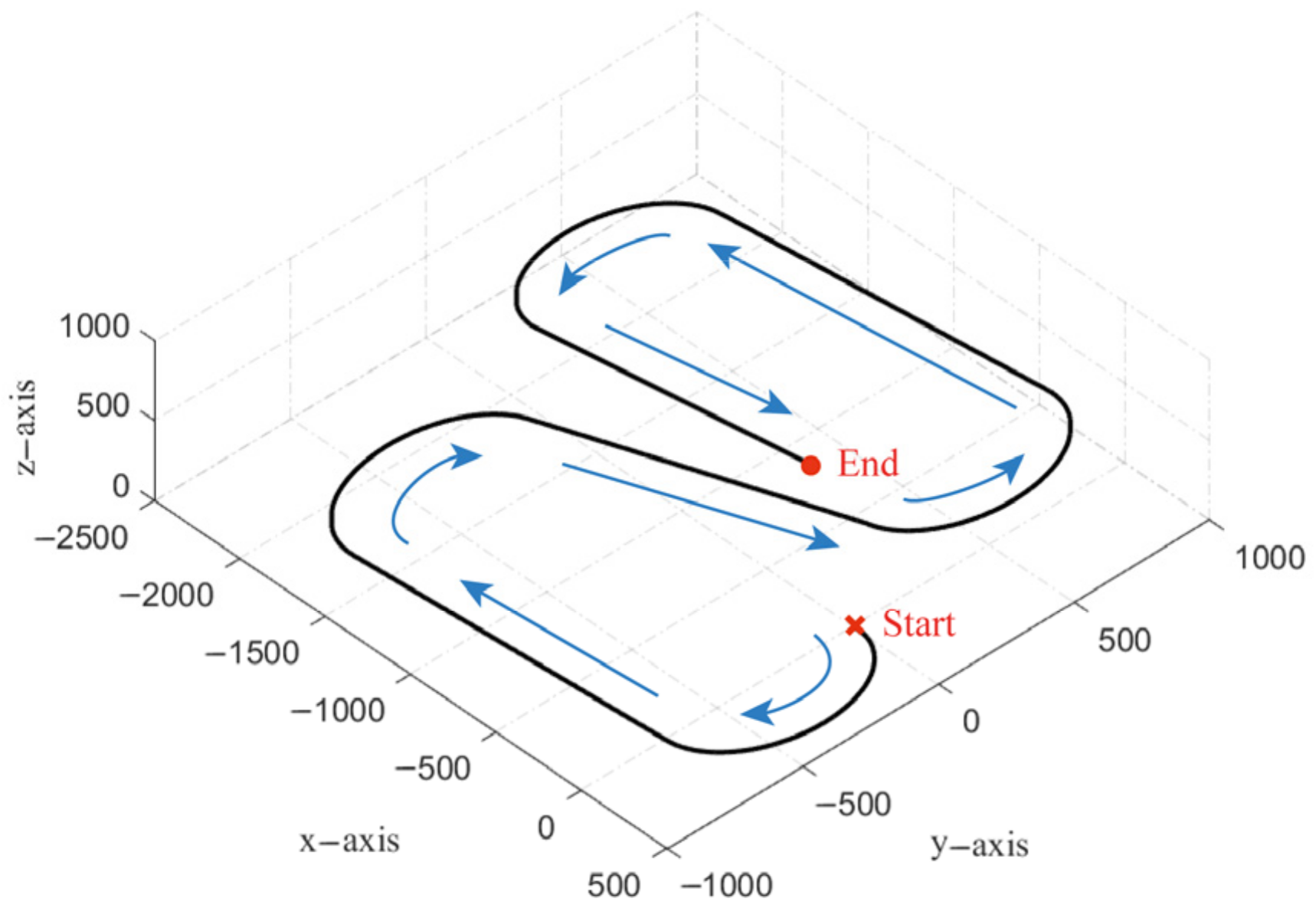
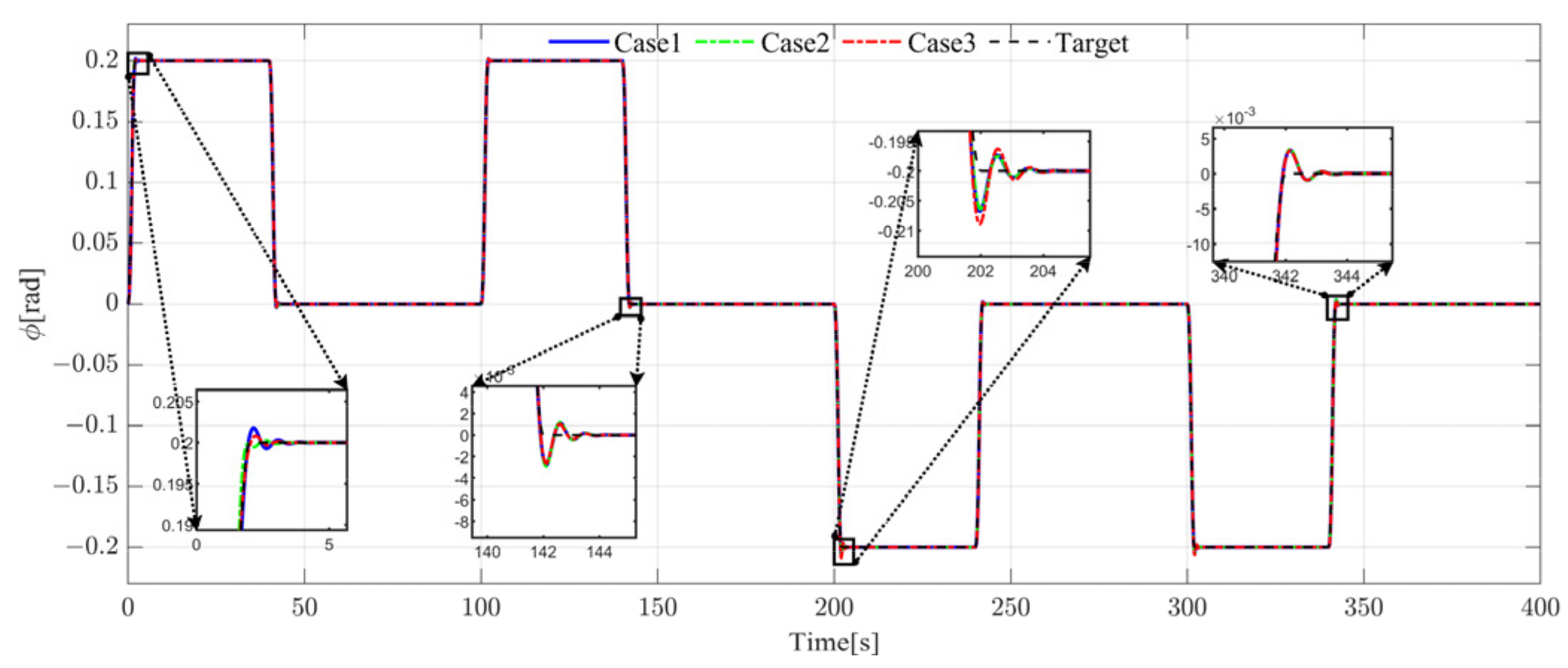
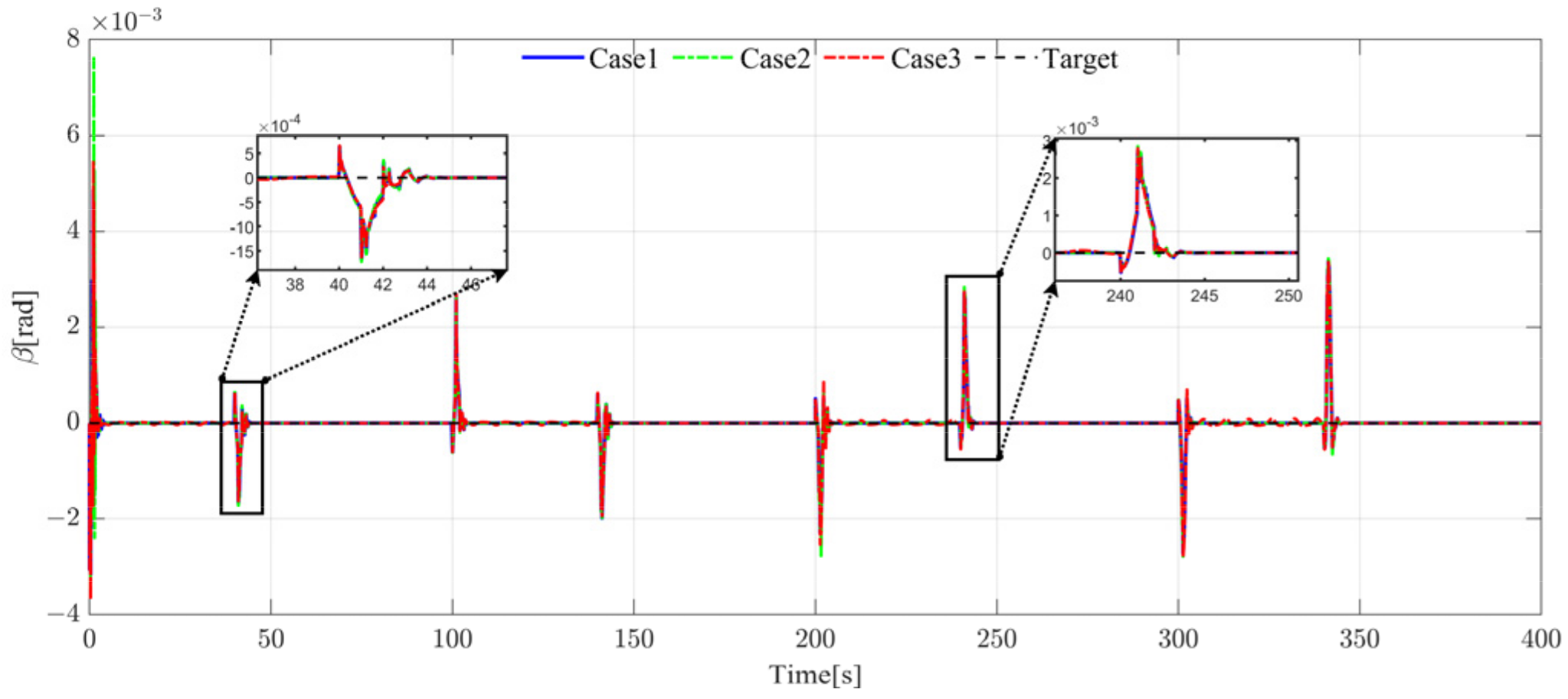
4. Numerical Simulation Results and Analysis
- Case 1:
- The ideal condition, where the FWUAV system has no parameter perturbation;
- Case 2:
- The FWUAV experiences aerodynamic parameter perturbations, which lead to a 20% increase in lift and drag coefficient uncertainty and a 20% decrease in lateral force coefficient uncertainty;
- Case 3:
- The FWUAV is susceptible to perturbations caused by wind in certain circumstances, resulting in nonlinear variations for the lift, drag, and lateral force coefficients, and the range of variations is 20%.
5. Conclusions
- The control method presented in this paper displays strong robustness and the ability to quickly and stably track the target signal;
- The controller in this paper is compared with PID and LADRC controllers, and the results demonstrate that the controller designed in this paper is superior to the latter two in signal tracking;
- To validate the effectiveness and robustness of the proposed controller in this paper for the target flight path, three operating conditions are described. The results reveal that the controller displays high steady-state accuracy and dynamic responsiveness under all three working circumstances, indicating its effectiveness and robustness.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Hakim, M.L.; Pratiwi, H.; Nugraha, A.C. Development of unmanned aerial vehicle (UAV) fixed-wing for monitoring, mapping and dropping applications on agricultural land. J. Phys. Conf. Series. IOP Publ. 2021, 2111, 012051. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, X.; Shen, L. Mission-oriented miniature fixed-wing UAV swarms: A multilayered and distributed architecture. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1588–1602. [Google Scholar] [CrossRef]
- Sun, J.; Jing, W.; Gao, C. Attitude dynamics and control of high-mass-ratio fixed-trim moving mass reentry vehicle. Aerosp. Sci. Technol. 2022, 123, 107456. [Google Scholar] [CrossRef]
- Robinett, R.D., III; Sturgis, B.R.; Kerr, S.A. Moving mass trim control for aerospace vehicles. J. Guid. Control Dyn. 1996, 19, 1064–1070. [Google Scholar] [CrossRef]
- Li, B.; Su, T.C. Heading autopilot of autonomous underwater vehicles with internal moving mass. J. Comput. Nonlinear Dyn. 2017, 12, 021003. [Google Scholar] [CrossRef]
- Huang, H.; Zhou, J. Solar sailing CubeSat attitude control method with satellite as moving mass. Acta Astronaut. 2019, 159, 331–341. [Google Scholar] [CrossRef]
- Chen, L.; Zhou, G.; Yan, X.J. Composite control of stratospheric airships with moving masses. J. Aircr. 2012, 49, 794–801. [Google Scholar] [CrossRef]
- Zhou, W.; Yin, K.; Wang, R. Design of attitude control system for UAV based on feedback linearization and adaptive control. Math. Probl. Eng. 2014, 2014, 492680. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Q.; Cheng, N. Non-linear flight control for unmanned aerial vehicles using adaptive backstepping based on invariant manifolds. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2013, 227, 33–44. [Google Scholar] [CrossRef]
- Castañeda, H.; Salas-Peña, O.S.; León-Morales, J. Robust flight control for a fixed-wing unmanned aerial vehicle using adaptive super-twisting approach. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 2310–2322. [Google Scholar] [CrossRef]
- Manzoor, T.; Xia, Y.; Zhai, D.H. Trajectory tracking control of a VTOL unmanned aerial vehicle using offset-free tracking MPC. Chin. J. Aeronaut. 2020, 33, 2024–2042. [Google Scholar] [CrossRef]
- Rogers, J.; Costello, M. Control authority of a projectile equipped with a controllable internal translating mass. J. Guid. Control Dyn. 2008, 31, 1323–1333. [Google Scholar] [CrossRef]
- Wang, L.L.; Yu, J.Q.; Wang, Y.F. Single moving-mass asymmetrical reentry vehicle modeling and control. Syst. Eng. Electron. 2015, 37, 1116–1123. [Google Scholar]
- Erturk, S.; Daskiran, O.; Dogan, A. Trim analysis of a moving-mass actuated airplane. AIAA Atmos. Flight Mech. Conf. 2012, 4647. [Google Scholar]
- Erturk, S.A.; Dogan, A. Dynamic simulation and control of mass-actuated airplane. J. Guid. Control Dyn. 2017, 40, 1939–1953. [Google Scholar] [CrossRef]
- Menon, P.; Vaddi, S.; Ohlmeyer, E. Finite-horizon robust integrated guidance-control of a moving-mass actuated kinetic warhead. AIAA Guid. Navig. Control Conf. Exhib. 2006, 6787. [Google Scholar]
- Gao, C.; Jing, W.; Wei, P. Research on application of single moving mass in the reentry warhead maneuver. Aerosp. Sci. Technol. 2013, 30, 108–118. [Google Scholar] [CrossRef]
- Jia-Wang, L.I.; Bao-Wei, S.; Cheng, S. Tracking control of autonomous underwater vehicles with internal moving mass. Acta Autom. Sin. 2008, 34, 1319–1323. [Google Scholar]
- Cao, C.; Hovakimyan, N. L1 adaptive output-feedback controller for non-strictly-positive-real reference systems: Missile longitudinal autopilot design. J. Guid. Control Dyn. 2009, 32, 717–726. [Google Scholar] [CrossRef]
- Gao, C.; Li, J.; Fan, Y. Immersion and invariance-based control of novel moving-mass flight vehicles. Aerosp. Sci. Technol. 2018, 74, 63–71. [Google Scholar] [CrossRef]
- Chen, H.; Zhou, J.; Zhou, M. Nussbaum gain adaptive control scheme for moving mass reentry hypersonic vehicle with actuator saturation. Aerosp. Sci. Technol. 2019, 91, 357–371. [Google Scholar] [CrossRef]
- Ahmed, S.; Azar, A.T. Adaptive fractional tracking control of robotic manipulator using fixed-time method. Complex Intell. Syst. 2024, 10, 369–382. [Google Scholar] [CrossRef]
- Ahmed, S.; Azar, A.T.; Tounsi, M.; Ibraheem, I.K. Adaptive Control Design for Euler–Lagrange Systems Using Fixed-Time Fractional Integral Sliding Mode Scheme. Fractal Fract. 2023, 7, 712. [Google Scholar] [CrossRef]
- Ahmed, S.; Azar, A.T.; Ibraheem, I.K. Nonlinear system controlled using novel adaptive fixed-time SMC. AIMS Math. 2024, 9, 7895–7916. [Google Scholar] [CrossRef]
- Ahmed, S.; Azar, A.T.; Ibraheem, I.K. Model-free scheme using time delay estimation with fixed-time FSMC for the nonlinear robot dynamics. AIMS Math. 2024, 9, 9989–10009. [Google Scholar] [CrossRef]
- Yue, T.; Zhang, X.; Wang, L. Flight dynamic modeling and control for a telescopic wing morphing aircraft via asymmetric wing morphing. Aerosp. Sci. Technol. 2017, 70, 328–338. [Google Scholar] [CrossRef]
- Basin, M.; Yu, P.; Shtessel, Y. Finite-and fixed-time differentiators utilising HOSM techniques. IET Control Theory Appl. 2017, 11, 1144–1152. [Google Scholar] [CrossRef]
- Wang, X.; Lin, H. Design and frequency analysis of continuous finite-time-convergent differentiator. Aerosp. Sci. Technol. 2012, 18, 69–78. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Zhang, L.; Wei, C.; Wu, R.; Cui, N. Fixed-time extended state observer based non-singular fast terminal sliding mode control for a VTVL reusable launch vehicle. Aerosp. Sci. Technol. 2018, 82, 70–79. [Google Scholar] [CrossRef]
- Tian, B.; Zuo, Z.; Yan, X. A fixed-time output feedback control scheme for double integrator systems. Automatica 2017, 80, 17–24. [Google Scholar] [CrossRef]
- Nussbaum, R.D. Some remarks on a conjecture in parameter adaptive control. Syst. Control Lett. 1983, 3, 243–246. [Google Scholar] [CrossRef]
- Xudong, Y.; Jingping, J. Adaptive nonlinear design without a priori knowledge of control directions. IEEE Trans. Autom. Control 1998, 43, 1617–1621. [Google Scholar] [CrossRef]
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; PTR Prentice-Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Plestan, F.; Shtessel, Y.; Brégeault, V. Sliding mode control with gain adaptation—Application to an electropneumatic actuator. Control Eng. Pract. 2013, 21, 679–688. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Total mass | 12 kg |
| Reference wing area value | 0.6 m2 |
| Mass block in wing | 1 kg |
| Mass block in fuselage | 1 kg |
| Moment of inertia (without moving mass) | kg·m2 |
| kg·m2 | |
| kg·m2 | |
| kg·m2 | |
| Span | 4 m |
| Mean aerodynamic chord | 0.1 m |
| Parameter | Roll Channel | Pitch Channel | Yaw Channel |
|---|---|---|---|
| 8.64 | 8.64 | 8.64 | |
| 18 | 16 | 10 | |
| 5 | 5 | 5 | |
| 9 | 99 | 99 | |
| 7 | 97 | 97 | |
| 5 | 9 | 9 | |
| 3 | 7 | 7 | |
| 0 | 5 | 50 | |
| 0 | 0.9 | 0.1 | |
| 80 | 250 | 80 | |
| 0.001 | 0.001 | 0.001 | |
| 0.0005 | 0.0005 | 0.0001 | |
| 0.6 | 0.5 | 0.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, L.; Zheng, J.; Wang, X.; Ma, L. Attitude Control of a Mass-Actuated Fixed-Wing UAV Based on Adaptive Global Fast Terminal Sliding Mode Control. Drones 2024, 8, 305. https://doi.org/10.3390/drones8070305
Yuan L, Zheng J, Wang X, Ma L. Attitude Control of a Mass-Actuated Fixed-Wing UAV Based on Adaptive Global Fast Terminal Sliding Mode Control. Drones. 2024; 8(7):305. https://doi.org/10.3390/drones8070305
Chicago/Turabian StyleYuan, Laohu, Jinxin Zheng, Xiaoguang Wang, and Le Ma. 2024. "Attitude Control of a Mass-Actuated Fixed-Wing UAV Based on Adaptive Global Fast Terminal Sliding Mode Control" Drones 8, no. 7: 305. https://doi.org/10.3390/drones8070305
APA StyleYuan, L., Zheng, J., Wang, X., & Ma, L. (2024). Attitude Control of a Mass-Actuated Fixed-Wing UAV Based on Adaptive Global Fast Terminal Sliding Mode Control. Drones, 8(7), 305. https://doi.org/10.3390/drones8070305