
SGGTSO: A Spherical Vector-Based Optimization Algorithm for 3D UAV Path Planning



Abstract
:1. Introduction
- This paper proposes a sigmoid nonlinear parameter Gaussian mutation elite individual genetic strategy tuna swarm optimization algorithm (SGGTSO). The proposed SGGTSO significantly improves the global optimization capability of TSO as well as the convergence speed and accuracy.
- This paper develops a 3D UAV path planning method based on the SGGTSO algorithm, which has excellent global search capability and can plan a flight path closer to the global optimum in more complex terrain environments.
- The remainder of this paper is structured as follows: Section 2 details the spherical vector-based path planning method and presents the fitness cost function used in subsequent experiments. Section 3 describes the basic TSO algorithm. Section 4 details the three improved operators and SGGTSO. Section 5 designs a comparative experiment of SGGTSO in the CEC2017 function set. Section 6 applies SGGTSO to nine different terrain scenarios for UAV path planning. Section 7 discusses the achievements of SGGTSO in the experiments in this paper, concludes the shortcomings of SGGTSO and outlooks future research directions of the algorithm. Section 8 provides a comprehensive conclusion of the paper.
2. Mathematical Model for 3D UAV Path Planning
2.1. Path Cost Function
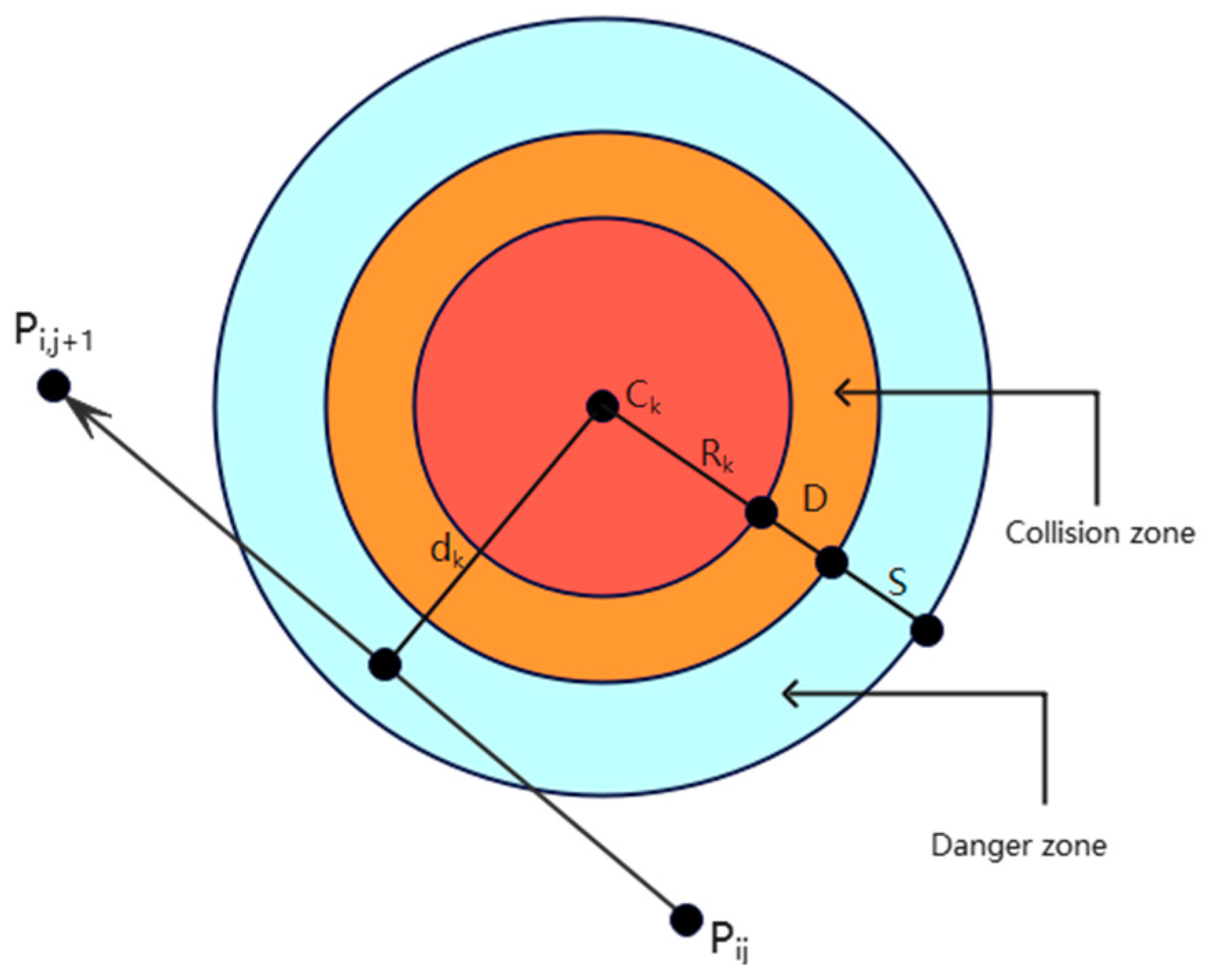
2.2. Security Cost Function
2.3. Flight Altitude Cost Function
2.4. Smooth Cost
2.5. Integrated Cost Function for UAV Path Planning
2.6. Spherical Vector-Based UAV Path Planning Method
3. Basic Tuna Swarm Optimization Algorithm
3.1. TSO Initialization
3.2. The Parabolic Feeding Strategy of the TSO
3.3. The Spiral Foraging Strategy of the TSO
3.4. Pseudo-Code of TSO
| Algorithm 1 Pseudo-code of TSO Algorithm |
| Initialization: Set parameters N, Dim, a, z and Initialize the position of tuna Xi (i = 1, 2, …, N) by (1),Counter t = 0 while t < do Calculate the fitness value of all tuna Update the position and value of the best tuna for (each tuna) do Update , and by (16), (17), (14) if (rand < z) then Update by (12) else if () then if (rand < 0.5) then Update by (15) else if () then Update by (13) end if end if end for end while t = t + 1 return the best fitness value f () and the best tuna |
4. The Proposed SGGTSO
4.1. Sigmoid Nonlinear Weighting Operators
4.2. Multi-Subgroup Gaussian Mutation Strategy
4.2.1. Gaussian Mutation Strategy Based on Elite Learning Mechanism
4.2.2. Non-Uniform Gaussian Mutation Strategy
4.3. Elite Individual Genetic Strategy
4.4. Pseudo-Code of SGGTSO
| Algorithm 2 Pseudo-code of SGGTSO Algorithm |
| Initialization: Set parameters N, Dim, a, z and Initialize the position of tuna Xi (i = 1, 2, …, N) by (1) Counter t = 0 while t < do Calculate the fitness value of all tuna Update the position and value of the best tuna for (i=1:N/2) do Update , and by (16), (17), (21) if (rand < z) then Update by (12) else if () then if (rand < 0.5) then Update by (15) and subsequently by (24) else if () then Update Update by (13) subsequently by (24) end if end if end for for (i=N/2+1:N) do Update , and by (16), (17), (21) if (rand < z) then Update by (12) else if () then if (rand < 0.5) then Update by (15) and subsequently by (26) else if () then Update by (13) subsequently by (26) end if end if end for Update by Elite individual genetic strategy t = t + 1 end while return the best fitness value f () and the best tuna |
5. Comparative Experiments and Data Analysis
5.1. Details of the Benchmark Function Set
5.2. Competition Algorithms and Experimental Parameter Settings
5.3. Experimental Results and Numerical Analysis
6. UAV Path Planning Experiments
6.1. Experimental Parameter Settings
6.2. Comparison of SGGTSO with Other Algorithms on 3D UAV Path Planning Problems
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pereira, D.S.; De Morais, M.R.; Nascimento, L.B.P.; Alsina, P.J.; Santos, V.G.; Fernandes, D.H.S.; Silva, M.R. Zigbee Protocol-Based Communication Network for Multi-Unmanned Aerial Vehicle Networks. IEEE Access 2020, 8, 57762–57771. [Google Scholar] [CrossRef]
- Yu, H.; Li, G.; Zhang, W.; Huang, Q.; Du, D.; Tian, Q.; Sebe, N. The unmanned aerial vehicle benchmark: Object detection, tracking and baseline. Int. J. Comput. Vis. 2020, 128, 1141–1159. [Google Scholar] [CrossRef]
- Basilico, N.; Carpin, S. Deploying teams of heterogeneous UAVs in cooperative two-level surveillance missions. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Luo, C.; Miao, W.; Ullah, H.; McClean, S.; Parr, G.; Min, G. Unmanned aerial vehicles for disaster management. In Geological Disaster Monitoring Based on Sensor Networks; Springer: Singapore, 2019; pp. 83–107. [Google Scholar]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Zhao, Y.; Zheng, Z.; Zhang, X.; Liu, Y. Q learning algorithm-based UAV path learning and obstacle avoidance approach. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; IEEE Press: Piscataway, NJ, USA, 2017; pp. 3397–3402. [Google Scholar]
- Cai, Y.; Xi, Q.; Xing, X.; Gui, H.; Liu, Q. Path planning for UAV tracking target based on improved A-star algorithm. In Proceedings of the 2019 1st International Conference on Industrial Artificial Intelligence (IAI), Shenyang, China, 23–27 July 2019; IEEE Press: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Chen, X.; Chen, X. The UAV dynamic path planning algorithm research based on Voronoi diagram. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; IEEE Press: Piscataway, NJ, USA, 2014; pp. 1069–1071. [Google Scholar]
- Li, W. An improved artificial potential field method based on chaos theory for UAV route planning. In Proceedings of the 2019 34rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Jinzhou, China, 6–8 June 2019; IEEE Press: Piscataway, NJ, USA, 2019; pp. 47–51. [Google Scholar]
- Subburaj, B.; Jayachandran, U.M.; Arumugham, V.; Suthanthira Amalraj, M.J.A. A Self-Adaptive Trajectory Optimization Algorithm Using Fuzzy Logic for Mobile Edge Computing System Assisted by Unmanned Aerial Vehicle. Drones 2023, 7, 266. [Google Scholar] [CrossRef]
- Wai, R.-J.; Prasetia, A.S. Prasetia. Adaptive neural network control and optimal path planning of UAV surveillance system with energy consumption prediction. IEEE Access 2019, 7, 126137–126153. [Google Scholar] [CrossRef]
- Salamat, B.; Tonello, A.M. A modelling approach to generate representative UAV trajectories using PSO. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019; IEEE Press: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Villanueva, A.; Fajardo, A. Deep reinforcement learning with noise injection for UAV path planning. In Proceedings of the 2019 IEEE 6th International Conference on Engineering Technologies and Applied Sciences (ICETAS), Kuala Lumpur, Malaysia, 20–21 December 2019; IEEE Press: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Peng, Z.; Li, B.; Chen, X.; Wu, J. Online route planning for UAV based on model predictive control and particle swarm optimization algorithm. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012; IEEE Press: Piscataway, NJ, USA, 2012; pp. 397–401. [Google Scholar]
- Li, Z.; Xia, X.; Yan, Y. A Novel Semidefinite Programming-based UAV 3D Localization Algorithm with Gray Wolf Optimization. Drones 2023, 7, 113. [Google Scholar] [CrossRef]
- Abdul, M.; Lee, S. A new coverage flight path planning algorithm based on footprint sweep fitting for unmanned aerial vehicle navigation in urban environments. Appl. Sci. 2019, 9, 1470. [Google Scholar]
- Zhou, C.; He, H.; Yang, P.; Lyu, F.; Wu, W.; Cheng, N.; Shen, X. Deep RL-based trajectory planning for AoI minimization in UAV-assisted IoT. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Wang, X.; Pan, J.-S.; Yang, Q.; Kong, L.; Snášel, V.; Chu, S.-C. Modified mayfly algorithm for uav path planning. Drones 2022, 6, 134. [Google Scholar] [CrossRef]
- Pham, H.X.; La, H.M.; Feil-Seifer, D.; Van Nguyen, L. Reinforcement learning for autonomous uav navigation using function approximation. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; IEEE Press: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Chen, Y.B.; Luo, G.C.; Mei, Y.S.; Yu, J.Q.; Su, X.L. UAV path planning using artificial potential field method updated by optimal control theory. Int. J. Syst. Sci. 2016, 47, 1407–1420. [Google Scholar] [CrossRef]
- Kothari, M.; Postlethwaite, I. A probabilistically robust path planning algorithm for UAVs using rapidly-exploring random trees. J. Intell. Robot. Syst. 2013, 71, 231–253. [Google Scholar] [CrossRef]
- Radmanesh, M.; Kumar, M. Flight formation of UAVs in presence of moving obstacles using fast-dynamic mixed integer linear programming. Aerosp. Sci. Technol. 2016, 50, 149–160. [Google Scholar] [CrossRef] [Green Version]
- Alshawi, I.; Yan, L.-S.; Pan, W.; Luo, B. Lifetime enhancement in wireless sensor networks using fuzzy approach and A-star algorithm. IEEE Sens. J. 2012, 12, 3010–3018. [Google Scholar] [CrossRef]
- Chu, S.C.; Roddick, J.F.; Pan, J.S. A parallel particle swarm optimization algorithm with communication strategies. J. Inf. Sci. Eng. 2005, 21, 809–818. [Google Scholar]
- Xie, Q.; Guo, Z.; Liu, D.; Chen, Z.; Shen, Z.; Wang, X. Optimization of heliostat field distribution based on improved Gray Wolf optimization algorithm. Renew. Energy 2021, 176, 447–458. [Google Scholar] [CrossRef]
- Zhong, C.; Li, G.; Meng, Z. Beluga whale optimization: A novel nature-inspired metaheuristic algorithm. Knowl.-Based Syst. 2022, 251, 109215. [Google Scholar] [CrossRef]
- Agushaka, J.O.; Ezugwu, A.E.; Abualigah, L. Dwarf mongoose optimization algorithm. Comput. Methods Appl. Mech. Eng. 2022, 391, 114570. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Mirjalili, S. Artificial hummingbird algorithm: A new bio-inspired optimizer with its engineering applications. Comput. Methods Appl. Mech. Eng. 2022, 388, 114194. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching–learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput.-Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-verse optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2016, 27, 495–513. [Google Scholar] [CrossRef]
- Xie, L.; Han, T.; Zhou, H.; Zhang, Z.-R.; Han, B.; Tang, A. Tuna swarm optimization: A novel swarm-based metaheuristic algorithm for global optimization. Comput. Intell. Neurosci. 2021, 2021, 9210050. [Google Scholar] [CrossRef]
- Phung, M.D.; Ha, Q.P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl. Soft Comput. 2021, 107, 107376. [Google Scholar] [CrossRef]
- Tuerxun, W.; Xu, C.; Guo, H.; Guo, L.; Zeng, N.; Cheng, Z. An ultra-short-term wind speed prediction model using LSTM based on modified tuna swarm optimization and successive variational mode decomposition. Energy Sci. Eng. 2022, 10, 3001–3022. [Google Scholar] [CrossRef]
- Wang, W.; Tian, J. An Improved Nonlinear Tuna Swarm Optimization Algorithm Based on Circle Chaos Map and Levy Flight Operator. Electronics 2022, 11, 3678. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, L.; Wu, B.; Ryspayev, A. Forestry Canopy Image Segmentation Based on Improved Tuna Swarm Optimization. Forests 2022, 13, 1746. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, J.S. Improved Whale Optimization Algorithm Based on Nonlinear Adaptive Weight and Golden Sine Operator. IEEE Access 2020, 8, 77013–77048. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, J.S. Improved Salp Swarm Algorithm Based on Levy Flight and Sine Cosine Operator. IEEE Access 2020, 8, 99740–99771. [Google Scholar] [CrossRef]
- Aloui, M.; Hamidi, F. A Chaotic Krill Herd Optimization Algorithm for Global Numerical Estimation of the Attraction Domain Nonlinear Systems. Mathematics 2021, 9, 1743. [Google Scholar] [CrossRef]
- Zhan, Z.H.; Zhang, J.; Li, Y.; Chung, H.S.H. Adaptive particle swarm optimization. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2009, 39, 1362–1381. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Gao, X.S.; Hu, Z.C. Evolutionary programming based on non-uniform mutation. Appl. Math. Comput. 2007, 192, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Golberg, D.E. Genetic algorithms in search, optimization, and machine learning. Addion Wesley 1989, 1989, 36. [Google Scholar]
- Zervoudakis, K.; Tsafarakis, S.; Paraskevi-Panagiota, S. A new hybrid firefly–genetic algorithm for the optimal product line design problem. In Proceedings of the Learning and Intelligent Optimization: 13th International Conference, LION 13, Chania, Greece, 27–31 May 2019; pp. 284–297. [Google Scholar]
- Wu, G.; Mallipeddi, R.; Suganthan, P.N. Problem Definitions and Evaluation Criteria for the CEC 2017 Competition on Constrained Real-Parameter Optimization; Technical Report; National University of Defense Technology: Changsha, China; Kyungpook National University: Daegu, Republic of Korea; Nanyang Technological University: Singapore, 2017. [Google Scholar]
- Reddy, R.B.; Uttara, K.M. Performance Analysis of Mimo Radar Waveform Using Accelerated Particle Swarm Optimization Algorithm. Signal Image Process. 2012, 3, 4. [Google Scholar] [CrossRef]
- Wang, L.; Cao, Q.; Zhang, Z.; Mirjalili, S.; Zhao, W. Artificial rabbits optimization: A new bio-inspired meta-heuristic algorithm for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2022, 114, 105082. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Australia, G. Digital elevation model (DEM) of Australia derived from LiDAR 5 Metre grid. Commonw. Aust. Geosci. Aust. Canberra 2015. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Function Number | Dim | Range | |
|---|---|---|---|---|
| Shifted and Rotated Bent Cigar Function | F1 | 100 | [−100, 100] | 100 |
| Shifted and Rotated Zakharov Function | F2 | 100 | [−100, 100] | 300 |
| Shifted and Rotated Rosenbrock’s Function | F3 | 100 | [−100, 100] | 400 |
| Shifted and Rotated Rastrigin’s Function | F4 | 100 | [−100, 100] | 500 |
| Shifted and Rotated Expanded Scaffer’s F6 Function | F5 | 100 | [−100, 100] | 600 |
| Shifted and Rotated Lunacek Bi_Rastrigin Function | F6 | 100 | [−100, 100] | 700 |
| Shifted and Rotated Non-Continuous Rastrigin’s Function | F7 | 100 | [−100, 100] | 800 |
| Shifted and Rotated Levy Function | F8 | 100 | [−100, 100] | 900 |
| Shifted and Rotated Schwefel’s Function | F9 | 100 | [−100, 100] | 1000 |
| Hybrid Function 1 (N = 3) | F10 | 100 | [−100, 100] | 1100 |
| Hybrid Function 2 (N = 3) | F11 | 100 | [−100, 100] | 1200 |
| Hybrid Function 3 (N = 3) | F12 | 100 | [−100, 100] | 1300 |
| Hybrid Function 4 (N = 4) | F13 | 100 | [−100, 100] | 1400 |
| Hybrid Function 5 (N = 4) | F14 | 100 | [−100, 100] | 1500 |
| Hybrid Function 6 (N = 4) | F15 | 100 | [−100, 100] | 1600 |
| Hybrid Function 6 (N = 5) | F16 | 100 | [−100, 100] | 1700 |
| Hybrid Function 6 (N = 5) | F17 | 100 | [−100, 100] | 1800 |
| Hybrid Function 6 (N = 5) | F18 | 100 | [−100, 100] | 1900 |
| Hybrid Function 6 (N = 6) | F19 | 100 | [−100, 100] | 2000 |
| Composition Function 1 (N = 3) | F20 | 100 | [−100, 100] | 2100 |
| Composition Function 2 (N = 3) | F21 | 100 | [−100, 100] | 2200 |
| Composition Function 3 (N = 4) | F22 | 100 | [−100, 100] | 2300 |
| Composition Function 4 (N = 4) | F23 | 100 | [−100, 100] | 2400 |
| Composition Function 5 (N = 5) | F24 | 100 | [−100, 100] | 2500 |
| Composition Function 6 (N = 5) | F25 | 100 | [−100, 100] | 2600 |
| Composition Function 7 (N = 6) | F26 | 100 | [−100, 100] | 2700 |
| Composition Function 8 (N = 6) | F27 | 100 | [−100, 100] | 2800 |
| Composition Function 9 (N = 3) | F28 | 100 | [−100, 100] | 2900 |
| Composition Function 10 (N = 3) | F29 | 100 | [−100, 100] | 3000 |
| Algorithm | Parameter Value |
|---|---|
| APSO | |
| ARO | |
| BWO | |
| WOA | |
| TSO | |
| SGGTSO |
| Function | Performance | APSO | ARO | BWO | WOA | TSO | SGGTSO |
|---|---|---|---|---|---|---|---|
| Mean | 2.86 × 10+11 | 8.70 × 10+09 | 2.54 × 10+11 | 6.36 × 10+10 | 3.54 × 10+09 | 2.18 × 10+05 | |
| Std | 2.78 × 10+10 | 2.39 × 10+09 | 7.02 × 10+09 | 5.66 × 10+09 | 1.27 × 10+09 | 8.23 × 10+04 | |
| Mean | 6.29 × 10+05 | 3.40 × 10+05 | 3.51 × 10+05 | 8.97 × 10+05 | 3.86 × 10+05 | 1.33 × 10+05 | |
| Std | 1.31 × 10+05 | 1.91 × 10+04 | 1.40 × 10+04 | 1.78 × 10+05 | 6.45 × 10+04 | 1.94 × 10+04 | |
| Mean | 8.66 × 10+04 | 2.22 × 10+03 | 9.46 × 10+04 | 1.24 × 10+04 | 1.48 × 10+03 | 7.72 × 10+02 | |
| Std | 1.53 × 10+04 | 2.99 × 10+02 | 6.56 × 10+03 | 2.27 × 10+03 | 1.81 × 10+02 | 6.07 × 10+01 | |
| Mean | 1.86 × 10+03 | 1.29 × 10+03 | 2.11 × 10+03 | 1.90 × 10+03 | 1.33 × 10+03 | 1.26 × 10+03 | |
| Std | 1.31 × 10+02 | 6.92 × 10+01 | 3.24 × 10+01 | 1.63 × 10+02 | 6.04 × 10+01 | 6.74 × 10+01 | |
| Mean | 6.82 × 10+02 | 6.45 × 10+02 | 7.12 × 10+02 | 7.03 × 10+02 | 6.67 × 10+02 | 6.38 × 10+02 | |
| Std | 6.48 | 5.98 | 1.80 | 7.60 | 4.19 | 8.03 | |
| Mean | 5.44 × 10+03 | 2.70 × 10+03 | 3.85 × 10+03 | 3.64 × 10+03 | 3.05 × 10+03 | 2.51 × 10+03 | |
| Std | 2.47 × 10+02 | 2.63 × 10+02 | 7.15 × 10+01 | 1.96 × 10+02 | 1.90 × 10+02 | 2.50 × 10+02 | |
| Mean | 2.28 × 10+03 | 1.63 × 10+03 | 2.58 × 10+03 | 2.33 × 10+03 | 1.77 × 10+03 | 1.66 × 10+03 | |
| Std | 1.00 × 10+02 | 9.38 × 10+01 | 3.17 × 10+01 | 1.25 × 10+02 | 1.00 × 10+02 | 8.88 × 10+01 | |
| Mean | 3.79 × 10+04 | 2.87 × 10+04 | 7.87 × 10+04 | 7.12 × 10+04 | 2.91 × 10+04 | 2.28 × 10+04 | |
| Std | 4.54 × 10+03 | 3.24 × 10+03 | 3.22 × 10+03 | 1.78 × 10+04 | 6.21 × 10+03 | 2.18 × 10+03 | |
| Mean | 2.44 × 10+04 | 1.72 × 10+04 | 3.23 × 10+04 | 2.78 × 10+04 | 2.11 × 10+04 | 1.60 × 10+04 | |
| Std | 1.17 × 10+03 | 1.34 × 10+03 | 5.04 × 10+02 | 1.67 × 10+03 | 3.41 × 10+03 | 1.78 × 10+03 | |
| Mean | 3.90 × 10+05 | 4.67 × 10+04 | 2.75 × 10+05 | 2.36 × 10+05 | 4.36 × 10+04 | 2.27 × 10+03 | |
| Std | 1.10 × 10+05 | 1.46 × 10+04 | 4.67 × 10+04 | 1.16 × 10+05 | 1.34 × 10+04 | 2.17 × 10+02 | |
| Mean | 1.78 × 10+11 | 5.95 × 10+08 | 1.88 × 10+11 | 1.28 × 10+10 | 3.13 × 10+08 | 4.11 × 10+07 | |
| Std | 3.52 × 10+10 | 1.19 × 10+08 | 9.99 × 10+09 | 3.44 × 10+09 | 1.70 × 10+08 | 1.41 × 10+07 | |
| Mean | 4.23 × 10+10 | 1.18 × 10+05 | 4.31 × 10+10 | 5.64 × 10+08 | 9.76 × 10+04 | 8.65 × 10+03 | |
| Std | 6.95 × 10+09 | 4.64 × 10+04 | 2.26 × 10+09 | 2.23 × 10+08 | 5.46 × 10+04 | 4.82 × 10+03 | |
| Mean | 7.12 × 10+07 | 3.17 × 10+06 | 8.15 × 10+07 | 1.41 × 10+07 | 9.99 × 10+05 | 8.47 × 10+05 | |
| Std | 5.12 × 10+07 | 1.66 × 10+06 | 2.44 × 10+07 | 6.51 × 10+06 | 5.23 × 10+05 | 3.51 × 10+05 | |
| Mean | 1.79 × 10+10 | 1.34 × 10+04 | 2.18 × 10+10 | 1.04 × 10+08 | 2.07 × 10+04 | 3.95 × 10+03 | |
| Std | 3.14 × 10+09 | 1.58 × 10+04 | 2.46 × 10+09 | 7.41 × 10+07 | 8.60 × 10+03 | 1.77 × 10+03 | |
| Mean | 1.71 × 10+04 | 6.01 × 10+03 | 2.23 × 10+04 | 1.56 × 10+04 | 6.46 × 10+03 | 6.07 × 10+03 | |
| Std | 2.83 × 10+03 | 5.72 × 10+02 | 1.55 × 10+03 | 2.22 × 10+03 | 7.89 × 10+02 | 5.85 × 10+02 | |
| Mean | 3.51 × 10+06 | 5.01 × 10+03 | 3.68 × 10+06 | 1.29 × 10+04 | 6.40 × 10+03 | 5.91 × 10+03 | |
| Std | 3.56 × 10+06 | 5.52 × 10+02 | 1.90 × 10+06 | 4.27 × 10+03 | 7.86 × 10+02 | 4.75 × 10+02 | |
| Mean | 1.10 × 10+08 | 3.52 × 10+06 | 1.59 × 10+08 | 1.21 × 10+07 | 1.40 × 10+06 | 1.16 × 10+06 | |
| Std | 7.05 × 10+07 | 1.65 × 10+06 | 5.53 × 10+07 | 6.90 × 10+06 | 7.71 × 10+05 | 3.89 × 10+05 | |
| Mean | 1.64 × 10+10 | 9.82 × 10+03 | 2.10 × 10+10 | 1.40 × 10+08 | 4.89 × 10+04 | 5.14 × 10+03 | |
| Std | 2.92 × 10+09 | 4.26 × 10+03 | 3.07 × 10+09 | 1.22 × 10+08 | 4.92 × 10+04 | 4.28 × 10+03 | |
| Mean | 6.16 × 10+03 | 5.23 × 10+03 | 7.61 × 10+03 | 6.60 × 10+03 | 5.68 × 10+03 | 5.04 × 10+03 | |
| Std | 5.31 × 10+02 | 3.80 × 10+02 | 3.31 × 10+02 | 5.62 × 10+02 | 7.06 × 10+02 | 4.18 × 10+02 | |
| Mean | 4.91 × 10+03 | 3.09 × 10+03 | 4.71 × 10+03 | 4.36 × 10+03 | 3.36 × 10+03 | 3.18 × 10+03 | |
| Std | 2.26 × 10+02 | 6.34 × 10+01 | 8.29 × 10+01 | 2.06 × 10+02 | 1.18 × 10+02 | 8.59 × 10+01 | |
| Mean | 2.78 × 10+04 | 2.01 × 10+04 | 3.43 × 10+04 | 3.04 × 10+04 | 2.35 × 10+04 | 1.93 × 10+04 | |
| Std | 9.26 × 10+02 | 1.54 × 10+03 | 9.49 × 10+02 | 1.56 × 10+03 | 3.25 × 10+03 | 2.09 × 10+03 | |
| Mean | 7.41 × 10+03 | 3.61 × 10+03 | 6.08 × 10+03 | 5.14 × 10+03 | 4.70 × 10+03 | 3.85 × 10+03 | |
| Std | 6.58 × 10+02 | 1.07 × 10+02 | 1.32 × 10+02 | 2.67 × 10+02 | 3.84 × 10+02 | 2.28 × 10+02 | |
| Mean | 1.35 × 10+04 | 4.69 × 10+03 | 9.12 × 10+03 | 6.62 × 10+03 | 6.39 × 10+03 | 4.89 × 10+03 | |
| Std | 9.35 × 10+02 | 1.68 × 10+02 | 4.36 × 10+02 | 3.63 × 10+02 | 7.44 × 10+02 | 1.48 × 10+02 | |
| Mean | 3.37 × 10+04 | 4.58 × 10+03 | 2.73 × 10+04 | 8.16 × 10+03 | 4.20 × 10+03 | 3.47 × 10+03 | |
| Std | 6.30 × 10+03 | 1.57 × 10+02 | 1.18 × 10+03 | 6.83 × 10+02 | 1.87 × 10+02 | 6.77 × 10+01 | |
| Mean | 5.30 × 10+04 | 2.38 × 10+04 | 5.05 × 10+04 | 3.79 × 10+04 | 2.70 × 10+04 | 2.07 × 10+04 | |
| Std | 4.98 × 10+03 | 2.63 × 10+03 | 1.00 × 10+03 | 4.87 × 10+03 | 2.31 × 10+03 | 2.15 × 10+03 | |
| Mean | 1.44 × 10+04 | 4.26 × 10+03 | 1.17 × 10+04 | 6.19 × 10+03 | 4.58 × 10+03 | 3.90 × 10+03 | |
| Std | 1.24 × 10+03 | 2.32 × 10+02 | 1.02 × 10+03 | 9.80 × 10+02 | 5.00 × 10+02 | 1.58 × 10+02 | |
| Mean | 3.53 × 10+04 | 5.81 × 10+03 | 2.75 × 10+04 | 1.11 × 10+04 | 4.61 × 10+03 | 3.59 × 10+03 | |
| Std | 4.97 × 10+03 | 3.40 × 10+02 | 1.00 × 10+03 | 1.40 × 10+03 | 2.37 × 10+02 | 5.84 × 10+01 | |
| Mean | 2.52 × 10+05 | 8.09 × 10+03 | 3.42 × 10+05 | 1.82 × 10+04 | 8.89 × 10+03 | 7.70 × 10+03 | |
| Std | 2.68 × 10+05 | 4.00 × 10+02 | 1.51 × 10+05 | 2.77 × 10+03 | 7.77 × 10+02 | 5.37 × 10+02 | |
| Mean | 3.31 × 10+10 | 5.04 × 10+06 | 3.86 × 10+10 | 1.29 × 10+09 | 2.31 × 10+06 | 5.25 × 10+04 | |
| Std | 6.81 × 10+09 | 2.24 × 10+06 | 3.97 × 10+09 | 4.20 × 10+08 | 9.43 × 10+05 | 3.06 × 10+04 |
| Algorithm | Rank Mean |
|---|---|
| SGGTSO | 1.21 |
| ARO | 2.14 |
| TSO | 2.69 |
| WOA | 4.31 |
| APSO | 5.10 |
| BWO | 5.55 |
| Parameter Meaning | Parameter Value |
|---|---|
| Population size of each algorithm | N = 100 |
| Number of iterations of each algorithm | Tmax = 200 |
| Number of Path Nodes | n = 12 |
| Smoothing cost function weight parameters | |
| The weight parameter of the total cost function accounted for by each cost function | |
| UAV flight altitude range | 100 m~300 m |
| Diameter of UAV | 1 m |
| Safe distance between UAV and obstacle | 1 m |
| Coordinates of drone origination point | (200, 100, 150) |
| UAV destination coordinates | (800, 800, 250) |
| Scenario Number | Obstacle Coordinates | Obstacle Radius |
|---|---|---|
| 1 | (382, 166, 100) | 80 |
| (300, 350, 150) | 80 | |
| (500, 300, 150) | 80 | |
| 2 | (500, 500, 100) | 80 |
| (700, 400, 150) | 100 | |
| 3 | (300, 450, 150) | 80 |
| (700, 450, 150) | 80 | |
| (500, 450, 150) | 80 | |
| 4 | (650, 520, 150) | 70 |
| (400, 500, 150) | 80 | |
| (500, 350, 150) | 70 | |
| (710, 680, 80) | 80 | |
| (600, 200, 150) | 80 | |
| 5 | (350, 200, 150) | 70 |
| (400, 500, 150) | 80 | |
| (510, 310, 150) | 80 | |
| (590, 660, 150) | 80 | |
| (770, 520, 150) | 80 | |
| 6 | (400, 500, 100) | 80 |
| (600, 200, 150) | 70 | |
| (500, 350, 150) | 80 | |
| (350, 200, 150) | 70 | |
| (700, 550, 120) | 60 | |
| (550, 600, 150) | 50 | |
| 7 | (400, 500, 100) | 80 |
| (600, 200, 150) | 70 | |
| (500, 350, 150) | 80 | |
| (350, 200, 150) | 70 | |
| (700, 550, 150) | 70 | |
| (650, 750, 150) | 80 | |
| 8 | (400, 500, 100) | 80 |
| (600, 200, 120) | 70 | |
| (500, 350, 150) | 80 | |
| (350, 300, 180) | 70 | |
| (700, 400, 130) | 70 | |
| (600, 650, 150) | 80 | |
| (780, 650, 80) | 80 | |
| 9 | (200, 500, 100) | 60 |
| (400, 200, 80) | 70 | |
| (530, 350, 150) | 80 | |
| (400, 500, 180) | 70 | |
| (580, 700, 130) | 70 | |
| (620, 550, 150) | 50 | |
| (770, 400, 80) | 80 | |
| (420, 700, 80) | 50 |
| Scenario | Performance | PSO | ARO | BWO | WOA | TSO | SGGTSO |
|---|---|---|---|---|---|---|---|
| 1 | Mean | 4650.6195 | 4633.9072 | 4620.8785 | 4624.0420 | 4620.8825 | 4620.8503 |
| Std | 24.2194 | 12.2620 | 0.0060 | 8.1170 | 0 | 0 | |
| 2 | Mean | 4714.7602 | 4998.3523 | 4691.9673 | 4929.2965 | 4691.3119 | 4685.4438 |
| Std | 55.3607 | 70.9725 | 5.1841 | 156.7188 | 11.5965 | 3.8348 | |
| 3 | Mean | 4854.6124 | 5184.6107 | 4762.6187 | 5190.3488 | 4758.9456 | 4734.2076 |
| Std | 162.6225 | 105.2708 | 19.9683 | 340.2450 | 28.0142 | 5.5315 | |
| 4 | Mean | 5203.2295 | 5678.0635 | 5308.2059 | 6274.2419 | 5276.3344 | 4999.6239 |
| Std | 174.0402 | 204.7676 | 101.6000 | 575.0824 | 87.3104 | 150.4596 | |
| 5 | Mean | 4770.3717 | 5652.4226 | 5178.5399 | 5887.3553 | 4967.6791 | 4709.5364 |
| Std | 78.9964 | 218.4651 | 291.7278 | 425.5549 | 331.7219 | 22.5212 | |
| 6 | Mean | 5175.5243 | 5485.5239 | 5151.0978 | 5502.0515 | 5162.8812 | 4819.0099 |
| Std | 345.6251 | 153.7492 | 96.4103 | 243.9819 | 142.2644 | 190.2085 | |
| 7 | Mean | 5174.1465 | 6212.7581 | 5865.8656 | 6998.7652 | 5594.5271 | 4810.2036 |
| Std | 259.8192 | 346.7010 | 487.8530 | 796.8889 | 517.6610 | 242.0675 | |
| 8 | Mean | 5975.5209 | 5676.5187 | 5434.8588 | 5984.5025 | 5365.7577 | 5286.7446 |
| Std | 548.0074 | 147.9724 | 45.9815 | 339.5598 | 80.4427 | 71.1403 | |
| s9 | Mean | 5067.5038 | 5669.9134 | 4859.8604 | 5315.2407 | 4844.2313 | 4712.3908 |
| Std | 325.5093 | 226.2500 | 91.8429 | 393.3128 | 165.9566 | 135.5750 |
| Scenario | SGGTSO Vs. PSO | SGGTSO Vs. ARO | SGGTSO Vs. BWO | SGGTSO Vs. WOA | SGGTSO Vs. TSO |
|---|---|---|---|---|---|
| 1 | 3.38 × 10−06 | 3.38 × 10−06 | 3.34 × 10−06 | 2.61 × 10−04 | 6.84 × 10−07 |
| 2 | 5.45 × 10−03 | 3.39 × 10−06 | 1.40 × 10−03 | 3.39 × 10−06 | 1.15 × 10−01 |
| 4 | 4.14 × 10−06 | 3.39 × 10−06 | 1.33 × 10−05 | 3.39 × 10−06 | 4.79 × 10−03 |
| 5 | 1.87 × 10−03 | 3.39 × 10−06 | 4.02 × 10−05 | 3.39 × 10−06 | 5.74 × 10−05 |
| 6 | 2.62 × 10−04 | 3.39 × 10−06 | 4.81 × 10−05 | 7.48 × 10−06 | 4.81 × 10−05 |
| 7 | 1.89 × 10−04 | 4.14 × 10−06 | 1.10 × 10−05 | 3.39 × 10−06 | 2.80 × 10−05 |
| 8 | 1.22 × 10−03 | 3.39 × 10−06 | 1.94 × 10−05 | 3.39 × 10−06 | 1.14 × 10−02 |
| 9 | 2.80 × 10−05 | 4.14 × 10−06 | 5.74 × 10−05 | 1.94 × 10−05 | 4.02 × 10−05 |
| Algorithm | Rank Mean |
|---|---|
| SGGTSO | 1.00 |
| TSO | 2.56 |
| BWO | 3.11 |
| PSO | 3.67 |
| ARO | 5.11 |
| WOA | 5.56 |
| Scenario | Performance | STSO | GTSO | GATSO |
|---|---|---|---|---|
| 1 | Mean | 4620.8825 | 4620.8548 | 4620.8592 |
| Std | 0 | 0.0015 | 0.0098 | |
| 2 | Mean | 4686.0970 | 4682.9206 | 4696.2323 |
| Std | 4.5982 | 1.7642 | 14.3759 | |
| 3 | Mean | 4740.9113 | 4735.7062 | 4760.4279 |
| Std | 10.5602 | 6.2401 | 20.3521 | |
| 4 | Mean | 5280.2424 | 5031.8022 | 5321.5388 |
| Std | 63.2109 | 136.6834 | 78.7448 | |
| 5 | Mean | 5018.4269 | 4706.0178 | 4842.7981 |
| Std | 332.3896 | 8.9056 | 82.1410 | |
| 6 | Mean | 5153.3339 | 5020.0487 | 5012.6240 |
| Std | 92.9241 | 177.1283 | 214.6043 | |
| 7 | Mean | 5398.8291 | 5019.7883 | 4992.0453 |
| Std | 471.1005 | 364.8271 | 334.5125 | |
| 8 | Mean | 5376.6540 | 5258.5874 | 5411.3050 |
| Std | 64.9558 | 64.6204 | 36.0006 | |
| 9 | Mean | 4966.3454 | 4713.3572 | 4790.3192 |
| Std | 281.7301 | 22.2578 | 166.7033 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Ye, C.; Tian, J. SGGTSO: A Spherical Vector-Based Optimization Algorithm for 3D UAV Path Planning. Drones 2023, 7, 452. https://doi.org/10.3390/drones7070452
Wang W, Ye C, Tian J. SGGTSO: A Spherical Vector-Based Optimization Algorithm for 3D UAV Path Planning. Drones. 2023; 7(7):452. https://doi.org/10.3390/drones7070452
Chicago/Turabian StyleWang, Wentao, Chen Ye, and Jun Tian. 2023. "SGGTSO: A Spherical Vector-Based Optimization Algorithm for 3D UAV Path Planning" Drones 7, no. 7: 452. https://doi.org/10.3390/drones7070452
APA StyleWang, W., Ye, C., & Tian, J. (2023). SGGTSO: A Spherical Vector-Based Optimization Algorithm for 3D UAV Path Planning. Drones, 7(7), 452. https://doi.org/10.3390/drones7070452