Optimal Control of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect for Nanomechatronics Systems

{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Optimal Control of a Multilayer Electroelastic Engine
2.1. Characteristics of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect
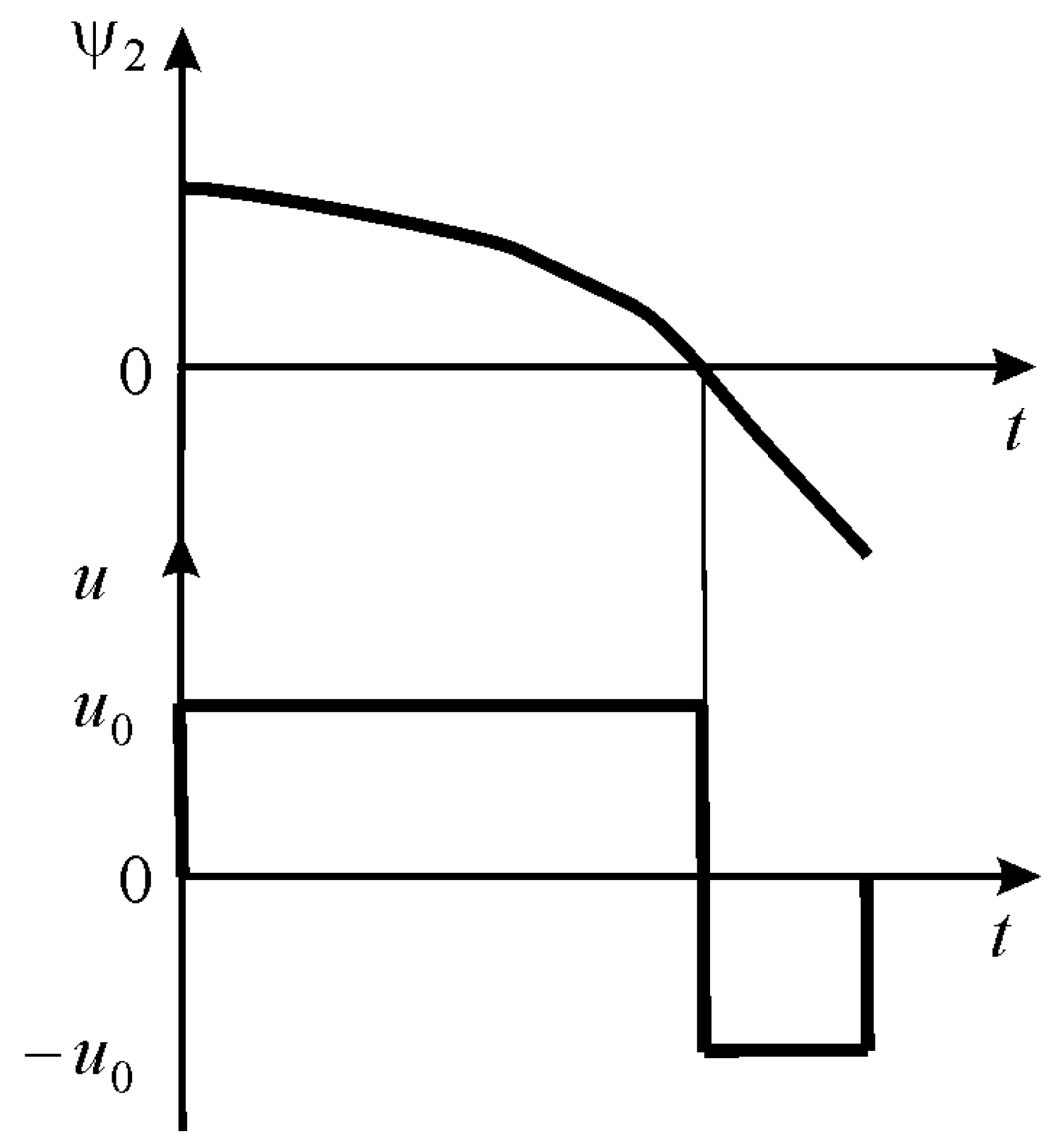
2.2. Application of Pontryagin Maximum Principle for Decision Optimal Control of a Multilayer Electroelastic Engine
3. Conclusions
Funding
Conflicts of Interest
References
- Uchino, K. Piezoelectric Actuator and Ultrasonic Motors; Kluwer Academic Publisher: Boston, MA, USA, 1997; 347p. [Google Scholar]
- Afonin, S.M. Absolute stability conditions for a system controlling the deformation of an elecromagnetoelastic transduser. Dokl. Math. 2006, 74, 943–948. [Google Scholar] [CrossRef]
- Afonin, S.M. Structural-parametric model and transfer functions of electroelastic actuator for nano- and microdisplacement. In Piezoelectrics and Nanomaterials: Fundamentals, Developments and Applications; Parinov, I.A., Ed.; Nova Science: New York, NY, USA, 2015; Chapter 9; pp. 225–242. [Google Scholar]
- Afonin, S.M. A structural-parametric model of electroelastic actuator for nano- and microdisplacement of mechatronic system. In Advances in Nanotechnology; Bartul, Z., Trenor, J., Eds.; Nova Science: New York, NY, USA, 2017; Chapter 8; Volume 19, pp. 259–284. [Google Scholar]
- Schultz, J.; Ueda, J.; Asada, H. Cellular Actuators; Butterworth-Heinemann Publisher: Oxford, UK, 2017; 382p. [Google Scholar]
- Karpelson, M.; Wei, G.-Y.; Wood, R.J. Driving high voltage piezoelectric actuators in microrobotic applications. Sens. Actuators A 2012, 176, 78–89. [Google Scholar] [CrossRef]
- Belfiore, N.P. Micromanipulation: A Challenge for Actuation. Actuators 2018, 7, 85. [Google Scholar] [CrossRef] [Green Version]
- Bonciani, G.; Biancucci, G.; Fioravanti, S.; Valiyev, V.; Binni, A. Learning Micromanipulation, Part 2: Term Projects in Practice. Actuators 2018, 7, 56. [Google Scholar] [CrossRef] [Green Version]
- Berlincourt, D.A.; Curran, D.R.; Jaffe, H. Piezoelectric and piezomagnetic materials and their function in transducers. In Physical Acoustics: Methods and Devices. Volume 1. Part A; Mason, W.P., Ed.; Academic Press: New York, NY, USA, 1964; Chapter 3; pp. 169–270. [Google Scholar]
- Afonin, S.M. Structural-parametric model and diagram of a multilayer electromagnetoelastic actuator for nanomechanics. Actuators 2019, 8, 52. [Google Scholar] [CrossRef] [Green Version]
- Afonin, S.M. Structural-parametric model electromagnetoelastic actuator nanodisplacement for mechatronics. Int. J. Phys. 2017, 5, 9–15. [Google Scholar] [CrossRef]
- Afonin, S.M. Block diagrams of a multilayer piezoelectric motor for nano- and microdisplacements based on the transverse piezoeffect. J. Comput. Syst. Sci. Int. 2015, 54, 424–439. [Google Scholar] [CrossRef]
- Afonin, S.M. Structural-parametric model of electromagnetoelastic actuator for nanomechanics. Actuators 2018, 7, 6. [Google Scholar] [CrossRef] [Green Version]
- Afonin, S.M. Structural parametric model of a piezoelectric nanodisplacement transduser. Dokl. Phys. 2008, 53, 137–143. [Google Scholar] [CrossRef]
- Afonin, S.M. A block diagram of electromagnetoelastic actuator nanodisplacement for communications Systems. Trans. Netw. Commun. 2018, 6, 1. [Google Scholar] [CrossRef]
- Afonin, S.M. Structural-parametric model multilayer electromagnetoelastic actuator for nanomechatronics. Int. J. Phys. 2019, 7, 50–57. [Google Scholar] [CrossRef] [Green Version]
- Afonin, S.M. Decision matrix equation and block diagram of multilayer electromagnetoelastic actuator micro and nanodisplacement for communications systems. Trans. Netw. Commun. 2019, 7, 11–21. [Google Scholar] [CrossRef]
- Pontryagin, L.S.; Boltyanskii, V.G.; Gamkrelidze, R.V.; Mishchenko, E.F. The Mathematical Theory of Optimal Processes; Interscience Publishers John Wiley & Sons, Inc.: New York, NY, USA; London, UK, 1962; 360p. [Google Scholar]
- Gamkrelidze, R.V. Discovery of the maximum principle. J. Dyn. Control Syst. 1999, 5, 437–451. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Afonin, S.M. Optimal Control of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect for Nanomechatronics Systems. Appl. Syst. Innov. 2020, 3, 53. https://doi.org/10.3390/asi3040053
Afonin SM. Optimal Control of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect for Nanomechatronics Systems. Applied System Innovation. 2020; 3(4):53. https://doi.org/10.3390/asi3040053
Chicago/Turabian StyleAfonin, Sergey M. 2020. "Optimal Control of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect for Nanomechatronics Systems" Applied System Innovation 3, no. 4: 53. https://doi.org/10.3390/asi3040053
APA StyleAfonin, S. M. (2020). Optimal Control of a Multilayer Electroelastic Engine with a Longitudinal Piezoeffect for Nanomechatronics Systems. Applied System Innovation, 3(4), 53. https://doi.org/10.3390/asi3040053