
Determination of Point-to-Point 3D Routing Algorithm Using LiDAR Data for Noise Prediction

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (a)
- Determination of a routing algorithm that can determine direct and other indirect routes (when the direct transmission is obstructed) between a source and destination (or receiver) points.
- (b)
- The establishment of optimal or best possible routes containing the highest energy/flow is tried to be determined.
- (c)
- Consider natural propagation of energy or pressure over 3D terrain in an outdoor environment. It did not try to find out any other algorithm which compares the existing city road networks to find the shortest route between two points.
- (d)
- The algorithm is required to find out a solution customized to handle propagation problems in 3D.
- (e)
- The algorithm should be capable of handling highly detailed and accurate 3D terrain data (e.g., LiDAR data) for the accurate determination of routes.
- (f)
- The efficiency of the route determination algorithm is required to be tested in terms of optimality of solutions.
- (g)
- The algorithm developed should be useful for accurate noise prediction and applicable for other urban applications, e.g., determination of solar irradiance, urban supply line, view shade analysis, setting up the wireless tower for a location, etc.
2. Research Gap and Need for Point-to-Point 3D Routing Algorithm for Noise Prediction Using LiDAR Data
- Development of a novel algorithm to extract 3D shortest routes between a pair of points (source point and receiver point).
- Determination of 3D routes using unlabeled raw 3D LiDAR terrain points existing between source and receiver points.
- Determination detailed routes with highest accuracy.
- Accurate sound propagation modelling integrating noise data, and LiDAR terrain data with noise model.
- Noise source: Source point of noise.
- Destination: Destination is where noise impact is about to calculate.
- Point-to-Point: It is pair of source and destination.
- Building Edges and corner: Edges of a building and its corners.
- Terrain data: Information of buildings, ground, trees, and other attributes.
- Terrain parameters: Route length and path difference.
- Ground and Non-ground points: Points on local ground levels. Points above the ground are non-ground points.
- Points of Intersection: Intersection points between lines.
- The route over the top of the building: Route determined from cutting plane technique that runs over buildings joining a noise source and noise receiver.
- The route around the sides of the building: Route determined from cutting plane technique that originates from the source and terminates at a receiving location traversing around the building.
- Reflected Route: Route determined where the route is formed after reflection from the ground or the nearby walls of the building (if any).
- Building Edges array: An array that contain building edges.
- Upward Route: A component of the route over top. It is the route from the source to the tallest building point.
- Downward Route: A component of the route over top. It is the route from the tallest building point to the destination point.
- Intersection Array: An array contains the intersection points between the building and cutting plane.
- Right side Route: Route from the source to destination point following the right side of the building.
- Left side Route: Route from the source to destination point following the left side of building.
- Tonal frequency: Short term single frequency sound.
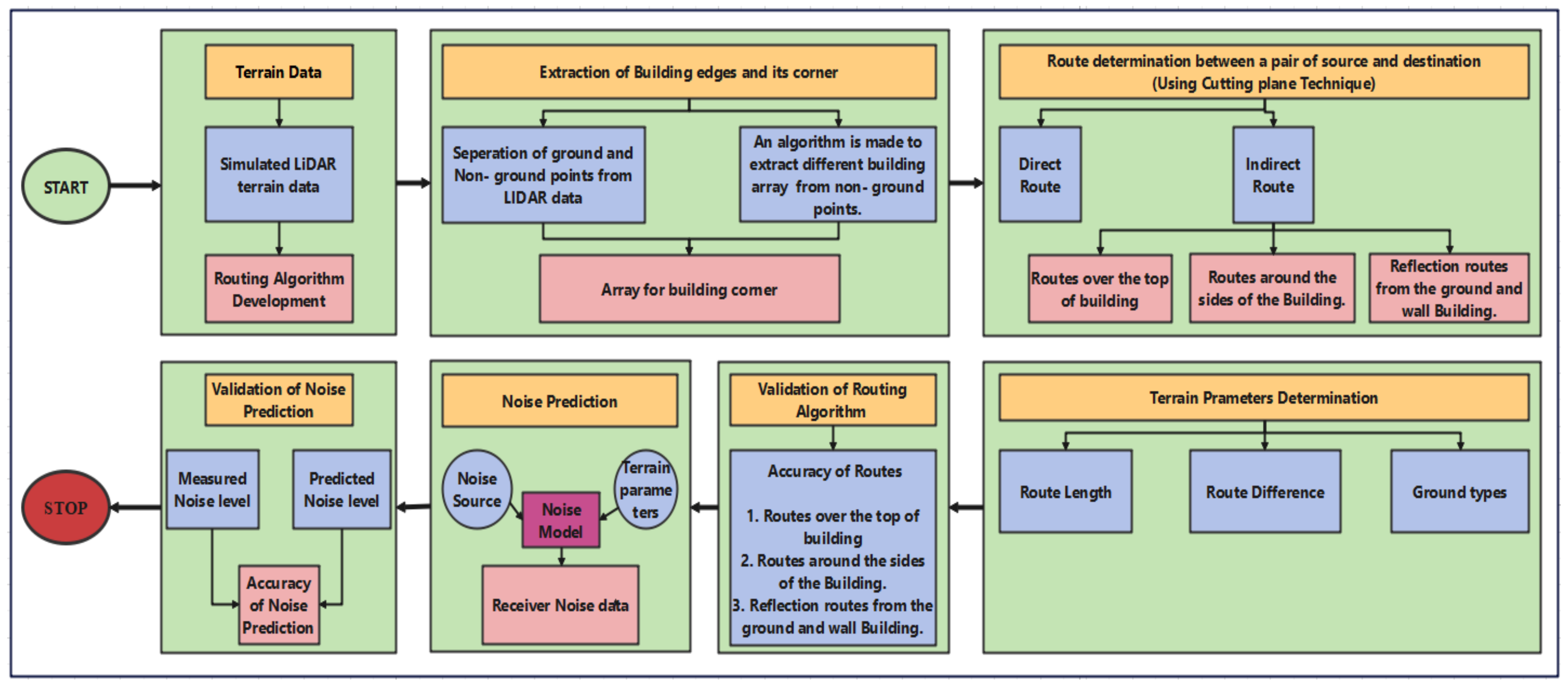
3. Methodology
3.1. LiDAR Data Acquisition
3.2. Building Corner Extraction Step 1 to Step 3
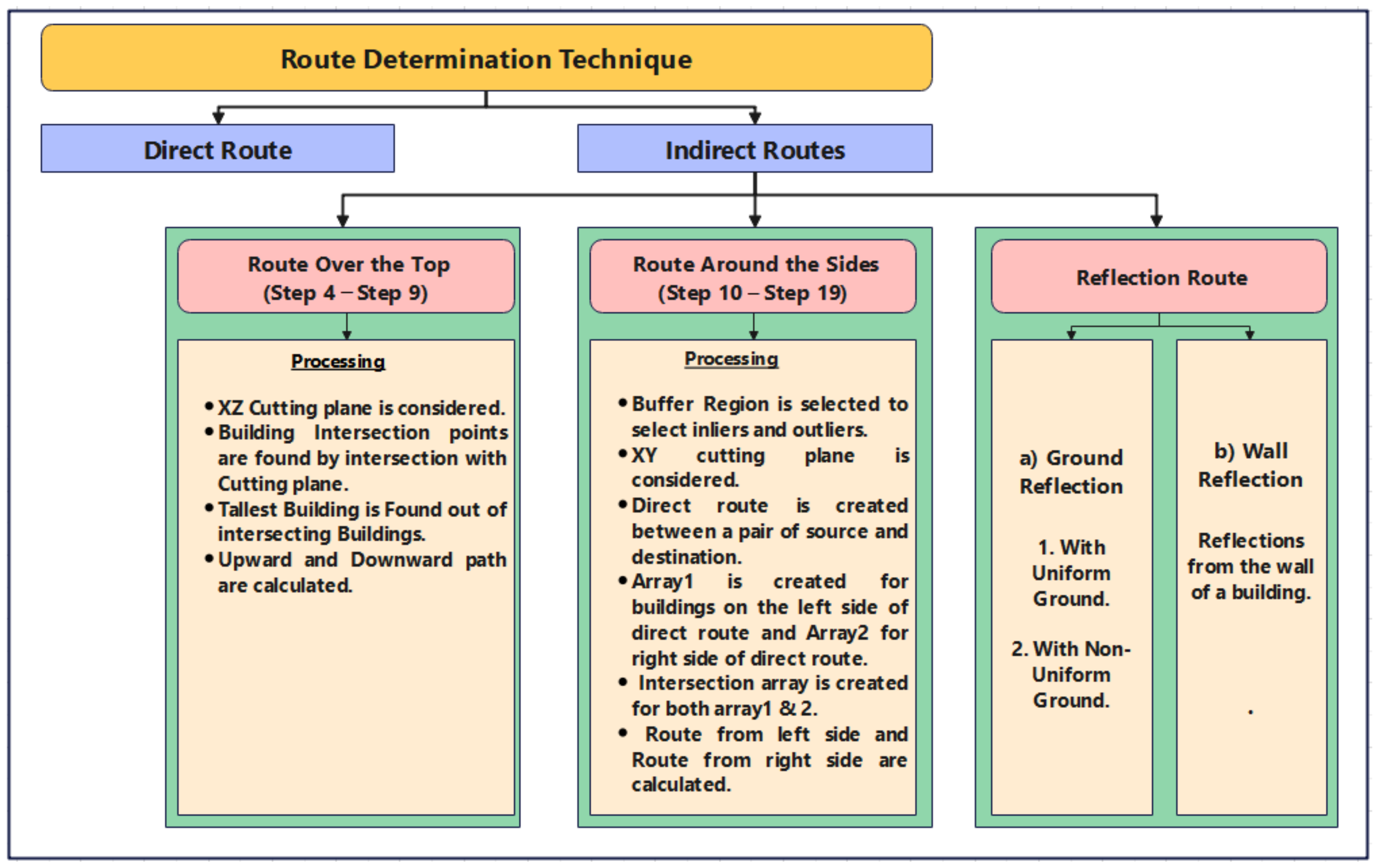
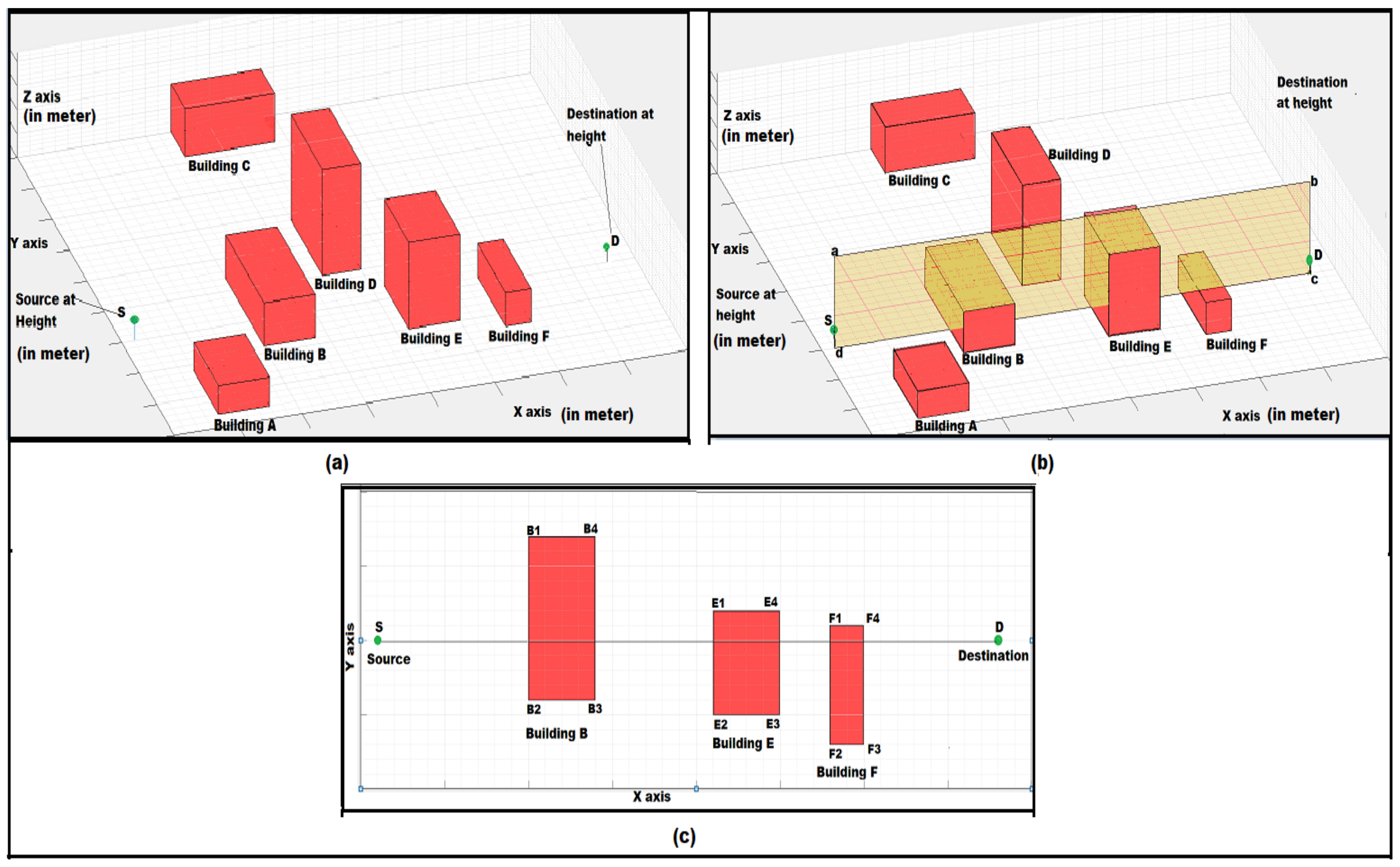
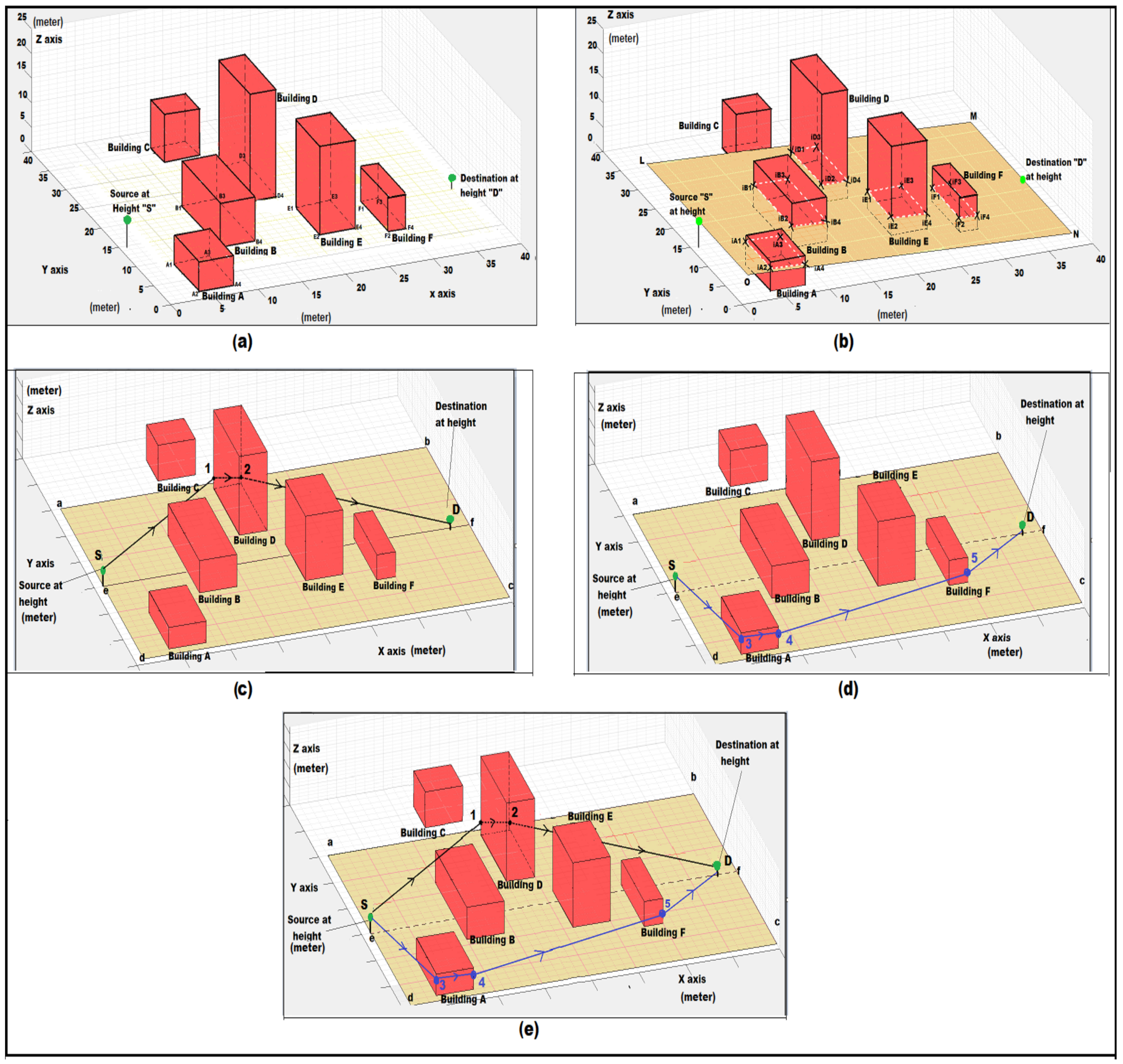
3.3. Route Determination for Direct Route and Indirect Route Step 4 to Step 19
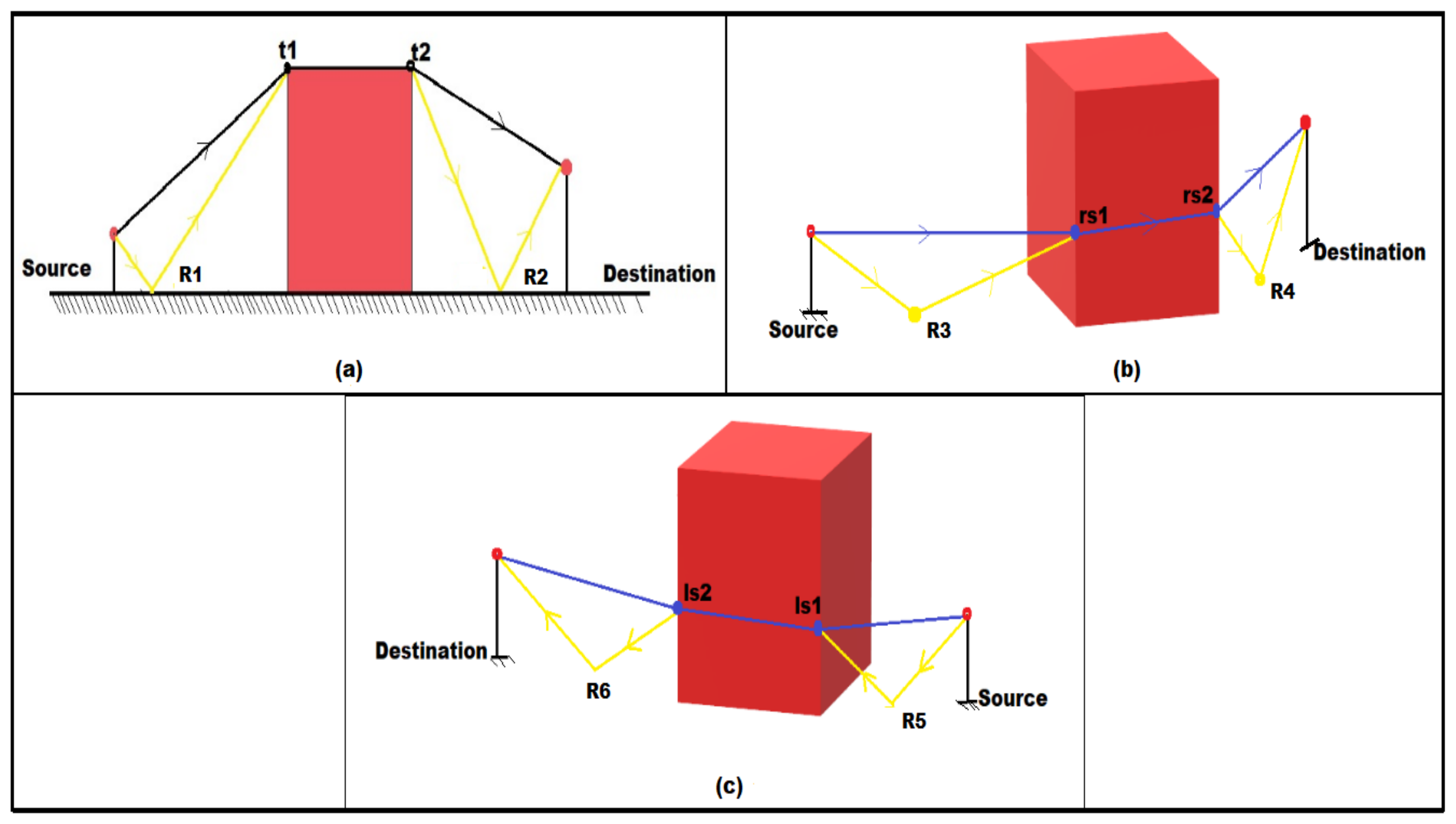
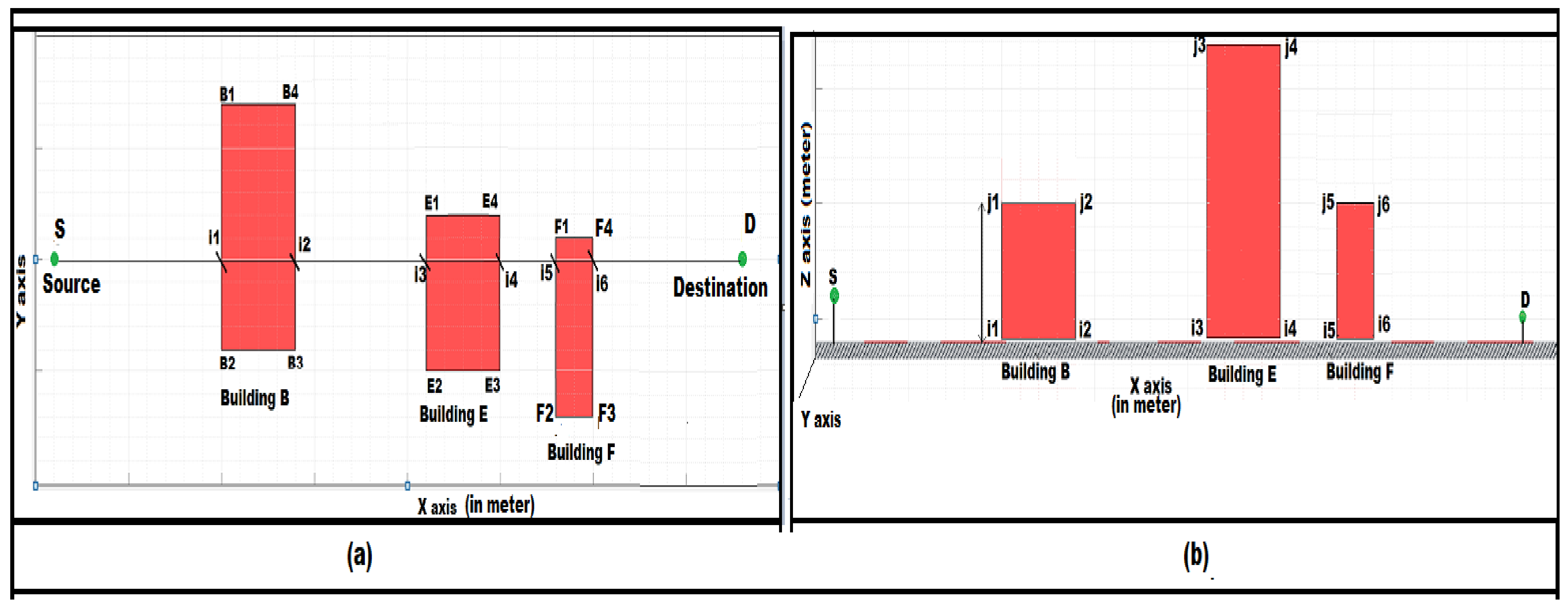
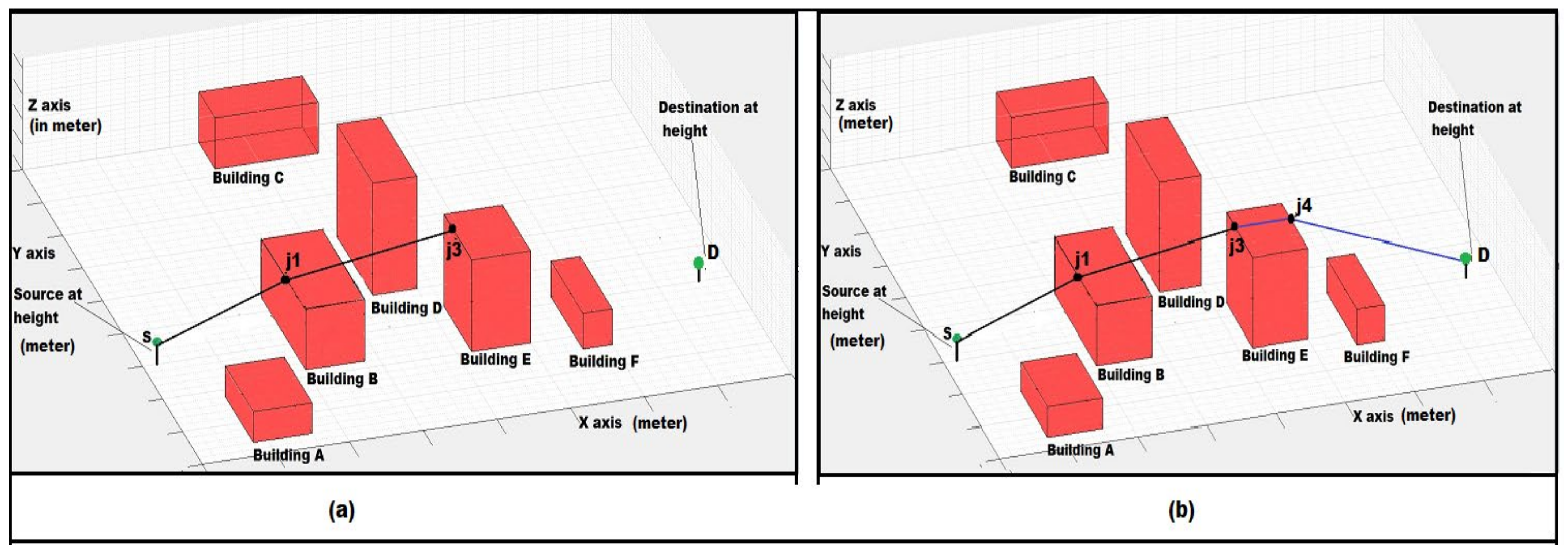
3.3.1. Route over the Top (Step 4 to Step 9)
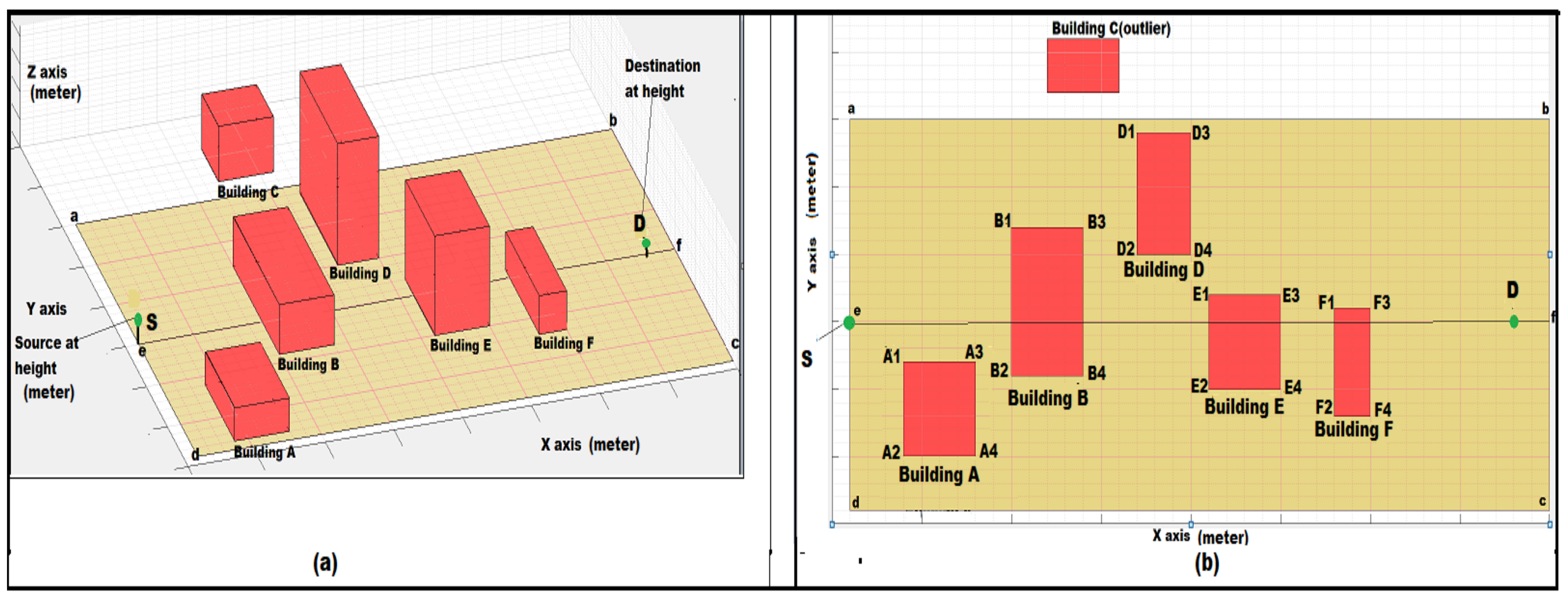
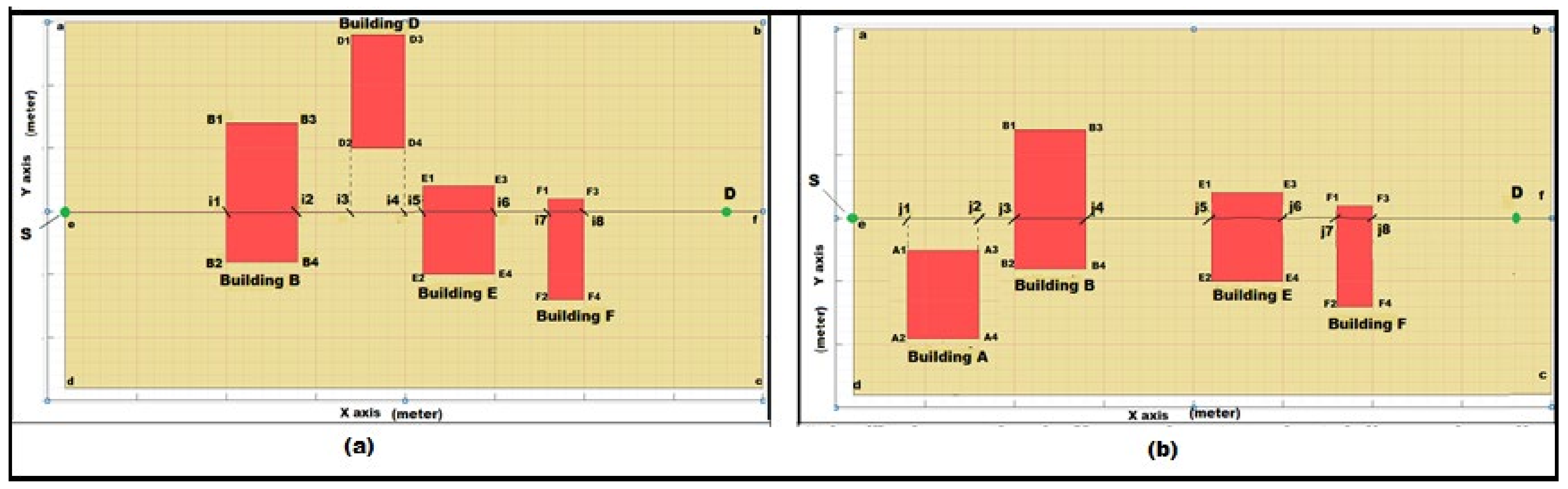
3.3.2. Route around the Sides (Step 10 to Step 19)
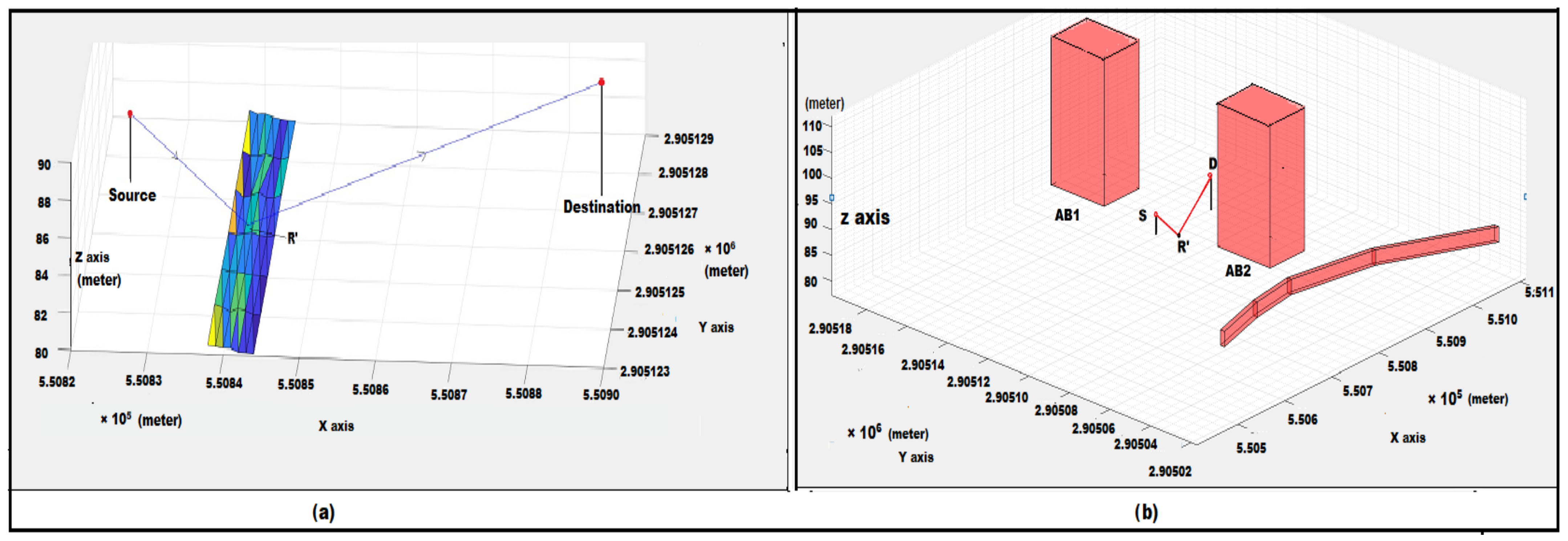
3.3.3. Reflection Route
- (a)
- Ground Reflection: Reflection through the ground. The ground may be uniform and non-uniform. There are two cases formed, one for uniform and other for non-uniform ground. Both cases are discussed in Supplementary Section S2.3.3 (c). An example for ground reflection is shown in Figure 12a,b.
- (b)
- Wall reflection Route: Route that is calculated after reflection of noise signal from the wall of building. Procedure for wall reflection route is provided in Supplementary Section S2.3.3 (c). Result is shown in Figure 13.
3.4. Determination of Terrain Parameters
- D = Direct transmission route
- D.A = Distance Attenuation
- B.A = Barrier attenuation
- λ = wavelength
- c = Speed of light
- f = Frequency
- N = Fresnel number
4. Results and Discussions
4.1. Accuracy for Determined Principal Routes
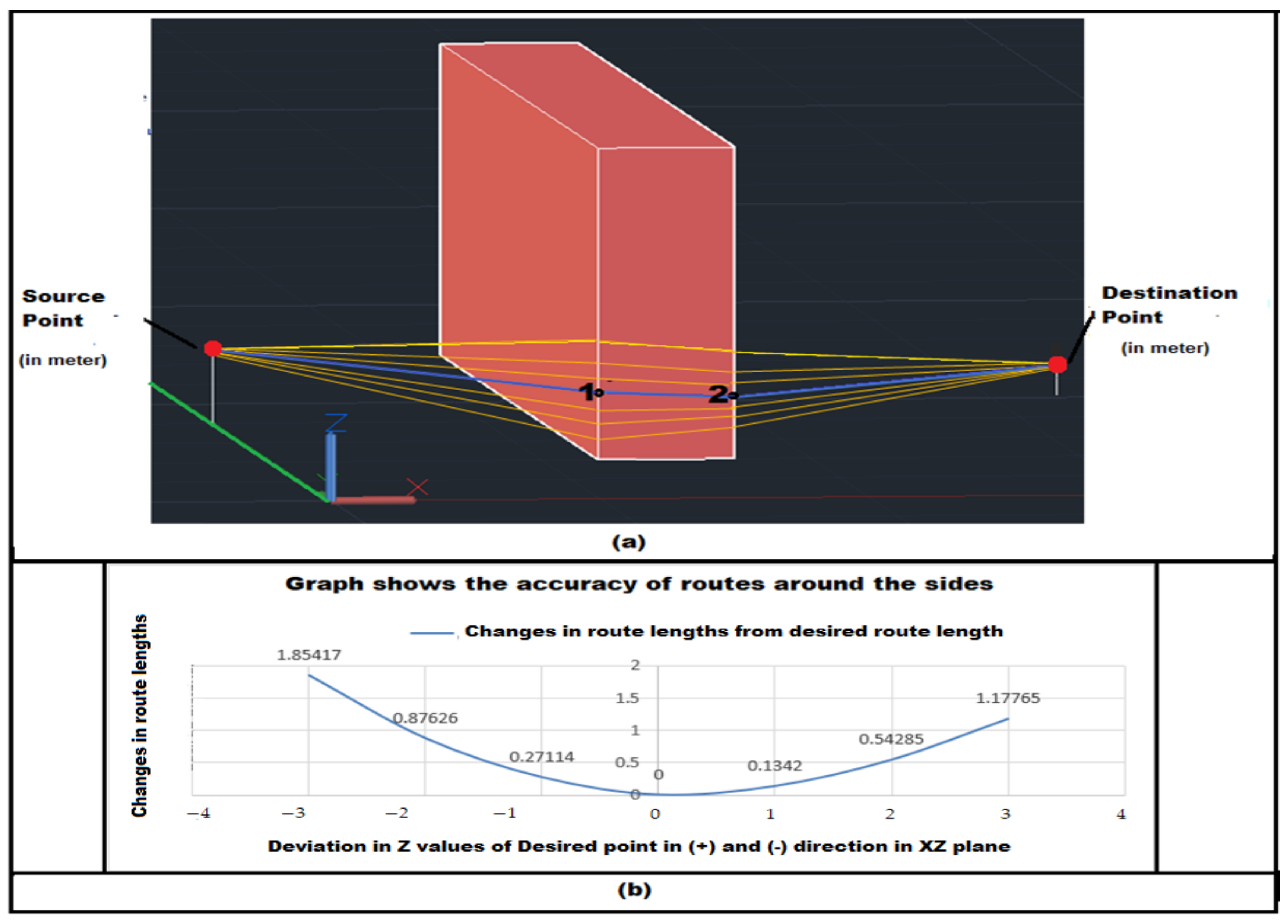
4.1.1. Route over the Top Accuracy
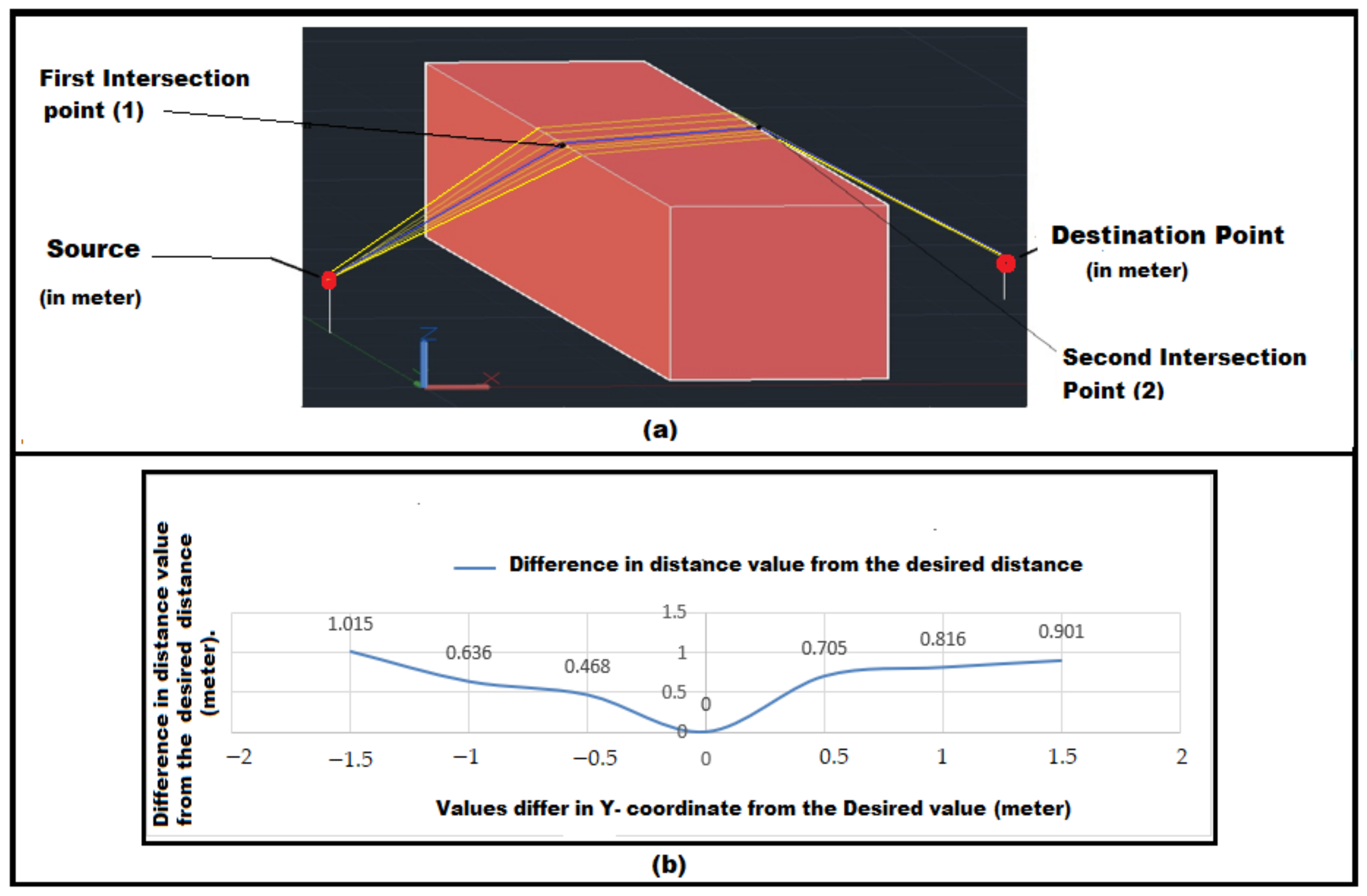
4.1.2. Route around the Side Accuracy
4.2. Accuracy of Noise Prediction
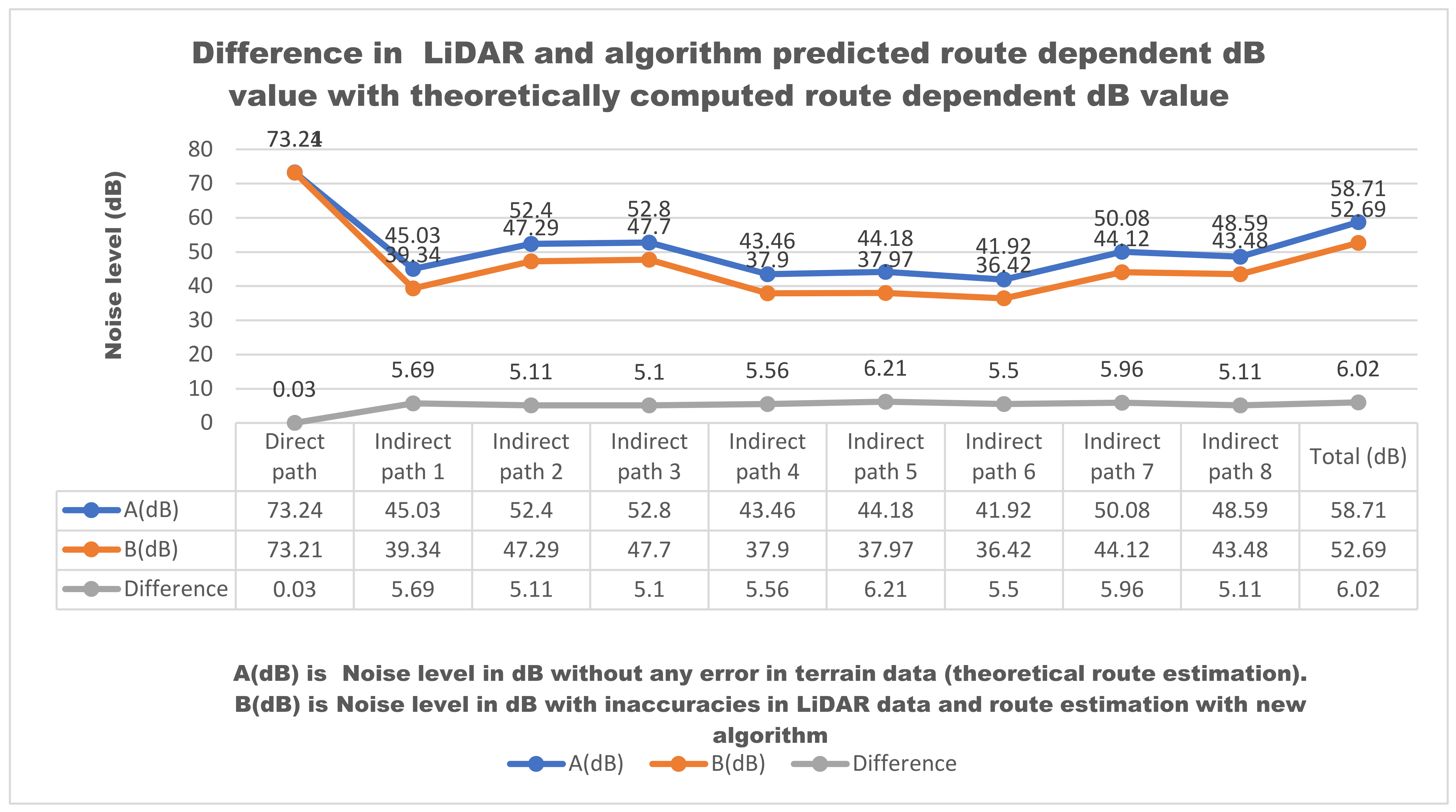
4.2.1. Deviations in New Algorithm Generated Routes, Which Are Extracted Using LiDAR Data Are Compared with Routes (Having no Error) Extracted Theoretically. Deviations Are Related in Terms of Predicted Noise Levels
4.2.2. Determination of Error in the Predicted Instantaneous Noise Levels
5. Conclusions
6. Future Scope
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Biswas, S.; Lohani, B. Development of High Resolution 3D Sound Propagation Model Using LIDAR Data and Air Photo. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1735–1740. [Google Scholar]
- Choi, J.; Zhang, B.; Oh, K. The shortest path from shortest distance on a polygon mesh. J. Theor. Appl. Inf. Technol. 2017, 95, 4446–4454. [Google Scholar]
- Tandel, B.; Sonaviya, D. A Quick Review on Noise Propagation Models and Software. In Proceedings of the ICSBE-2016—7th International Conference On Sustainable Built Environment, Kandy, Sri Lanka, 16–18 December 2016; p. 6. [Google Scholar]
- Bendtsen, H. The Nordic prediction method for road traffic noise. Sci. Total Environ. 1999, 235, 331–338. [Google Scholar] [CrossRef]
- Hadzi-Nikolova, M.; Mirakovski, D.; Ristova, E.; Ceravolo, S. Modeling and Mapping of Urban Noise Pollution with SoundPLAN Software. Univ. Goce Delcev. 2012, 185, 38–41. [Google Scholar]
- Kogut, J.P.; Pilecka, E. Application of the terrestrial laser scanner in the monitoring of earth structures. Open Geosci. 2020, 12, 503–517. [Google Scholar] [CrossRef]
- Veronese, L.D.P.; Ismail, A.; Narayan, V.; Schulze, M. An Accurate and Computational Efficient System for Detecting and Classifying Ego and Sides Lanes Using LiDAR. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1476–1483. [Google Scholar] [CrossRef]
- Asal, F.F.F. Comparative Analysis of the Digital Terrain Models Extracted from Airborne LiDAR Point Clouds Using Different Filtering Approaches in Residential Landscapes. Adv. Remote Sens. 2019, 8, 51–75. [Google Scholar] [CrossRef] [Green Version]
- Madkour, A.; Aref, W.G.; Rehman, F.U.; Rahman, M.A.; Basalamah, S. A Survey of Shortest-Path Algorithms. arXiv 2017, arXiv:1705.02044. [Google Scholar]
- Chen, Y.; She, J.; Li, X.; Zhang, S.; Tan, J. Accurate and efficient calculation of three-dimensional cost distance. ISPRS Int. J. Geo-Inf. 2020, 9, 353. [Google Scholar] [CrossRef]
- Duan, P.; AI, Y. Research on an Improved Ant Colony Optimization Algorithm and its Application. Int. J. Hybrid Inf. Technol. 2016, 9, 223–234. [Google Scholar] [CrossRef]
- Zarrinpanjeh, N.; Dadrass Javan, F.; Naji, A.; Azadi, H.; De Maeyer, P.; Witlox, F. Optimum path determination to facilitate fire station rescue missions using ant colony optimization algorithms (case study: City of Karaj). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2020, 43, 1285–1291. [Google Scholar] [CrossRef]
- Alasadi, H.A.A.; Aziz, M.T.; Dhiya, M.; Abdulmajed, A. A Network Analysis for Finding the Shortest Path in Hospital Information System with GIS and GPS. J. Netw. Comput. Appl. 2020, 5, 10–23. [Google Scholar] [CrossRef]
- Canali, C.; Lancellotti, R. GASP: Genetic Algorithms for Service Placement in Fog Computing Systems. Algorithms 2019, 12, 201. [Google Scholar] [CrossRef] [Green Version]
- Mittal, H.; Okorn, B.; Jangid, A.; Held, D. Self-Supervised Point Cloud Completion via Inpainting. arXiv 2021, arXiv:2111.10701. [Google Scholar]
- Medrano, F.A. Effects of raster terrain representation on GIS shortest path analysis. PLoS ONE 2021, 16, e0250106. [Google Scholar] [CrossRef]
- Jyothi, S.; Padmavati, S.; Visvavidyalayam, M.; Varma, M.K.R.; Varma, S.A.K. Digitizing the Forest Resource Map Using ArcGIS. Int. J. Comput. Sci. Issues 2010, 7, 300. [Google Scholar]
- Tiwari, S.K.; Kumaraswamidhas, L.A.; Garg, N. Accuracy of short-term noise monitoring strategy in comparison to long-term noise monitoring strategy. Indian J. Pure Appl. Phys. 2021, 59, 569–576. [Google Scholar]
- Dubey, R.; Bharadwaj, S. Collaborative air quality mapping of different metropolitan collaborative air quality mapping of different metropolitan. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 87–94. [Google Scholar] [CrossRef]
- Dubey, R.; Bharadwaj, S.; Zafar, M.I.; Mahajan, V.; Srivastava, A.; Biswas, S. GIS Mapping of Short-Term Noisy Event of Diwali Night in Lucknow City. ISPRS Int. J. Geo-Inf. 2021, 11, 25. [Google Scholar] [CrossRef]
- Dubey, R.; Bharadwaj, S.; Zafar, M.I.; Bhushan Sharma, V.; Biswas, S. Collaborative noise mapping using smartphone. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 253–260. [Google Scholar] [CrossRef]
- Zafar, M.I.; Bharadwaj, S.; Dubey, R.; Biswas, S. Different scales of urban traffic noise prediction. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 1181–1188. [Google Scholar] [CrossRef]
- Joshi, G.; Pal, B.; Zafar, I.; Bharadwaj, S.; Biswas, S. Developing intelligent fire alarm system and need of UAV. Lect. Notes Civ. Eng. 2020, 51, 403–414. [Google Scholar] [CrossRef]
- Bharadwaj, S.; Dubey, R.; Biswas, S. Determination of the Best Location for Setting up a Transmission Tower in the City. In Proceedings of the 2020 International Conference on Smart Innovations in Design, Environment, Management, Planning and Computing (ICSIDEMPC), Aurangabad, India, 30–31 October 2020; pp. 63–68. [Google Scholar] [CrossRef]
- Bharadwaj, S.; Dubey, R. Raster data based automated noise data integration for noise raster data based automated noise data integration for noise. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 159–166. [Google Scholar] [CrossRef]
- Dubey, R.; Bharadwaj, S.; Biswas, D.S. Intelligent Noise Mapping Using Smart Phone on Web Platform. In Proceedings of the 2020 International Conference on Smart Innovations in Design, Environment, Management, Planning and Computing (ICSIDEMPC), Aurangabad, India, 30–31 October 2020; pp. 69–74. [Google Scholar] [CrossRef]
- Sun, P.; Zhao, X.; Xu, Z.; Wang, R.; Min, H. A 3D LiDAR Data-Based Dedicated Road Boundary Detection Algorithm for Autonomous Vehicles. IEEE Access 2019, 7, 29623–29638. [Google Scholar] [CrossRef]
- Masiero, A.; Tucci, G.; Vettore, A. Tree Detection with a Mobile Laser Scanner. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2021; Volume 76, p. 012034. [Google Scholar] [CrossRef]
- Bharadwaj, S.; Dubey, R.; Zafar, M.I.; Srivastava, A.; Bhushan Sharma, V.; Biswas, S. Determination of Optimal Location for Setting Up Cell Phone Tower in City Environment Using Lidar Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 647–654. [Google Scholar] [CrossRef]
- Sharma, V.B.; Singh, K.; Gupta, R.; Joshi, A.; Dubey, R.; Gupta, V.; Bharadwaj, S.; Zafar, M.I.; Bajpai, S.; Khan, M.A.; et al. Review of structural health monitoring techniques in pipeline and wind turbine industries. Appl. Syst. Innov. 2021, 4, 59. [Google Scholar] [CrossRef]
- Bello, S.A.; Yu, S.; Wang, C.; Adam, J.M.; Li, J. Review: Deep learning on 3D point clouds. Remote Sens. 2020, 12, 1729. [Google Scholar] [CrossRef]
- Popescu, G. The accuracy of lidar measurements for the different land cover categories. Fast system of monitoring and interactive mapping View project. Earth Obs. Surv. Environ. Eng. 2015, 4, 158–164. [Google Scholar]
- Liu, X.; Zhang, Z.; Peterson, J.; Chandra, S. Large Area DEM Generation Using Airborne LiDAR Data and Quality Control. In Proceedings of the 8th International Symposium on Spatial Accuracy Assessment in Natural Resources and Environmental Sciences, Shanghai, China, 25–27 June 2008; pp. 79–85. [Google Scholar]
- Kanpur, I.I.T.; Lohani, B. Building Extraction Why Building Extraction? arXiv 2008, arXiv:2111.15637. [Google Scholar]
- Lohani, B.; Ghosh, S. Airborne LiDAR Technology: A Review of Data Collection and Processing Systems. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 567–579. [Google Scholar] [CrossRef]
- Jovanović, D.; Milovanov, S.; Ruskovski, I.; Govedarica, M.; Sladić, D.; Radulović, A.; Pajić, V. Building virtual 3D city model for smart cities applications: A case study on campus area of the university of novi sad. ISPRS Int. J. Geo-Inf. 2020, 9, 476. [Google Scholar] [CrossRef]
- Sonker, M.; Bajpai, S.; Khan, M.A.; Yu, X.; Tiwary, S.K.; Shreyash, N. Review of Recent Advances and Their Improvement in the Effectiveness of Hydrogel-Based Targeted Drug Delivery: A Hope for Treating Cancer. ACS Appl. Bio Mater. 2021, 4, 8080–8109. [Google Scholar] [CrossRef]
- Rodrigues, M.; Simeão Carvalho, P. Laws of reflection and Snell’s law revisited by video modeling. In Proceedings of the 12th Education and Training in Optics and Photonics Conference, Porto, Portugal, 17 July 2014; Volume 9289, p. 928922. [Google Scholar] [CrossRef] [Green Version]
- Gaol, F.L. Bresenham Algorithm: Implementation and Analysis in Raster Shape. J. Comput. 2013, 8, 69–78. [Google Scholar] [CrossRef] [Green Version]
- Rabah, F.K.; Ghabayen, S.M.; Salha, A.A. Effect of GIS Interpolation Techniques on the Accuracy of the Spatial Representation of Groundwater Monitoring Data in Gaza Strip. J. Environ. Sci. Technol. 2011, 4, 579–589. [Google Scholar] [CrossRef] [Green Version]
- Bocher, E.; Guillaume, G.; Picaut, J.; Petit, G.; Fortin, N. Noisemodelling: An open source GIS based tool to produce environmental noise maps. ISPRS Int. J. Geo-Inf. 2019, 8, 130. [Google Scholar] [CrossRef] [Green Version]
- Laixing, L.I.U.; Deren, L.I.; Zhenfeng, S. Research on geospatial information sharing platform based on ArcGIS server. Archives 2003, 37, 791–795. [Google Scholar]
- Bajpai, S.; Shreyash, N.; Sonker, M.; Tiwary, S.K.; Biswas, S. Investigation of SiO2 Nanoparticle Retention in Flow Channels, Its Remediation Using Surfactants and Relevance of Artificial Intelligence in the Future. Chemistry 2021, 3, 1371–1380. [Google Scholar] [CrossRef]
- Win, L.L. Finding optimal route information and network analysis for emergency service. Int. J. Adv. Res. Dev. 2018, 3, 22–25. [Google Scholar]
- Guo, Y.; Wang, H.; Hu, Q.; Liu, H.; Liu, L.; Bennamoun, M. Deep Learning for 3D Point Clouds: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 4338–4364. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Pearce, J.M.; Harrap, R.; Barber, G. The application of LiDAR to assessment of rooftop solar photovoltaic deployment potential in a municipal district unit. Sensors 2012, 12, 4534–4558. [Google Scholar] [CrossRef]
- Song, W.; Zou, S.; Tian, Y.; Fong, S.; Cho, K. Classifying 3D objects in LiDAR point clouds with a back-propagation neural network. Hum.-Cent. Comput. Inf. Sci. 2018, 8, 1–12. [Google Scholar] [CrossRef]
- Murcia, H.F.; Tilaguy, S.; Ouazaa, S. Development of a Low-Cost System for 3D Orchard Mapping Integrating UGV and LiDAR. Plants 2021, 10, 2804. [Google Scholar] [CrossRef]
- Chen, Z.; Gao, B.; Devereux, B. State-of-the-art: DTM generation using airborne LIDAR data. Sensors 2017, 17, 150. [Google Scholar] [CrossRef] [Green Version]
- Guoping, L.; Chunxiang, C.; Xiaowen, L.; Hao, Z.; Qisheng, H.; Linyan, B.; Chaoyi, C. Classification of Lidar Point Cloud and Generation of DTM from Lidar Height and Intensity Data in Forested Area. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 313–318. [Google Scholar]
- Sharma, M.; Paige, G.B.; Miller, S.N. DEM development from ground-based LiDAR data: A method to remove non-surface objects. Remote Sens. 2010, 2, 2629–2642. [Google Scholar] [CrossRef] [Green Version]
- Sulaiman, N.S.; Majid, Z.; Setan, H. DTM generation from LiDAR data by using different filters in open–source software. Geoinf. Sci. J. 2010, 10, 89–109. [Google Scholar]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef] [Green Version]
- Priestnall, G.; Jaafar, J.; Duncan, A. Extracting urban features from LiDAR digital surface models. Comput. Environ. Urban Syst. 2000, 24, 65–78. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bharadwaj, S.; Dubey, R.; Zafar, M.I.; Faridi, R.; Jena, D.; Biswas, S. Determination of Point-to-Point 3D Routing Algorithm Using LiDAR Data for Noise Prediction. Appl. Syst. Innov. 2022, 5, 58. https://doi.org/10.3390/asi5030058
Bharadwaj S, Dubey R, Zafar MI, Faridi R, Jena D, Biswas S. Determination of Point-to-Point 3D Routing Algorithm Using LiDAR Data for Noise Prediction. Applied System Innovation. 2022; 5(3):58. https://doi.org/10.3390/asi5030058
Chicago/Turabian StyleBharadwaj, Shruti, Rakesh Dubey, Md Iltaf Zafar, Rashid Faridi, Debashish Jena, and Susham Biswas. 2022. "Determination of Point-to-Point 3D Routing Algorithm Using LiDAR Data for Noise Prediction" Applied System Innovation 5, no. 3: 58. https://doi.org/10.3390/asi5030058
APA StyleBharadwaj, S., Dubey, R., Zafar, M. I., Faridi, R., Jena, D., & Biswas, S. (2022). Determination of Point-to-Point 3D Routing Algorithm Using LiDAR Data for Noise Prediction. Applied System Innovation, 5(3), 58. https://doi.org/10.3390/asi5030058