
The Contribution of the User Experiences Goals for Designing Better Cobots: A Systematic Literature Review



Abstract
:1. Introduction
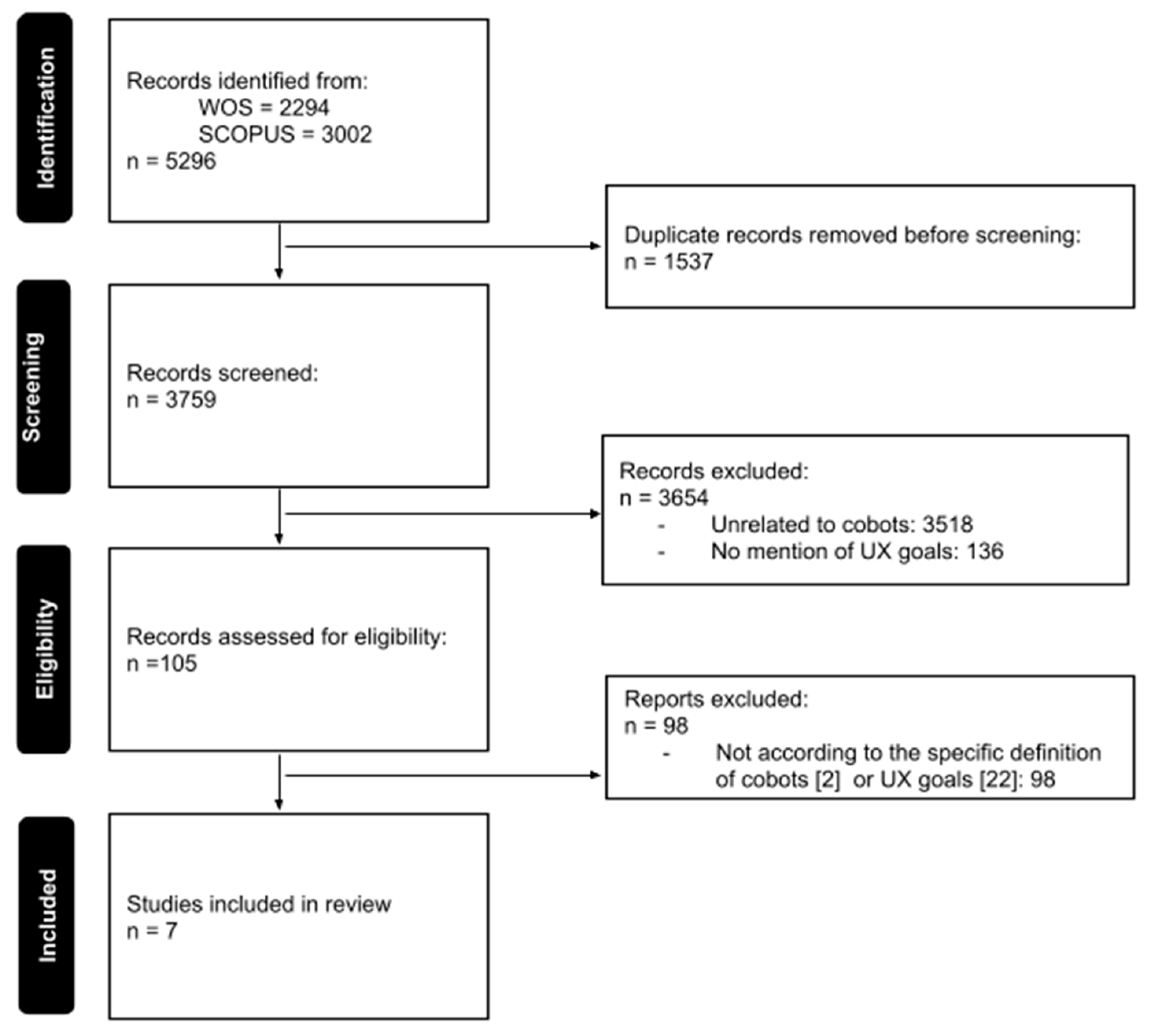
2. Materials and Methods
2.1. Search Strategy Protocol
2.2. Eligibility Criteria
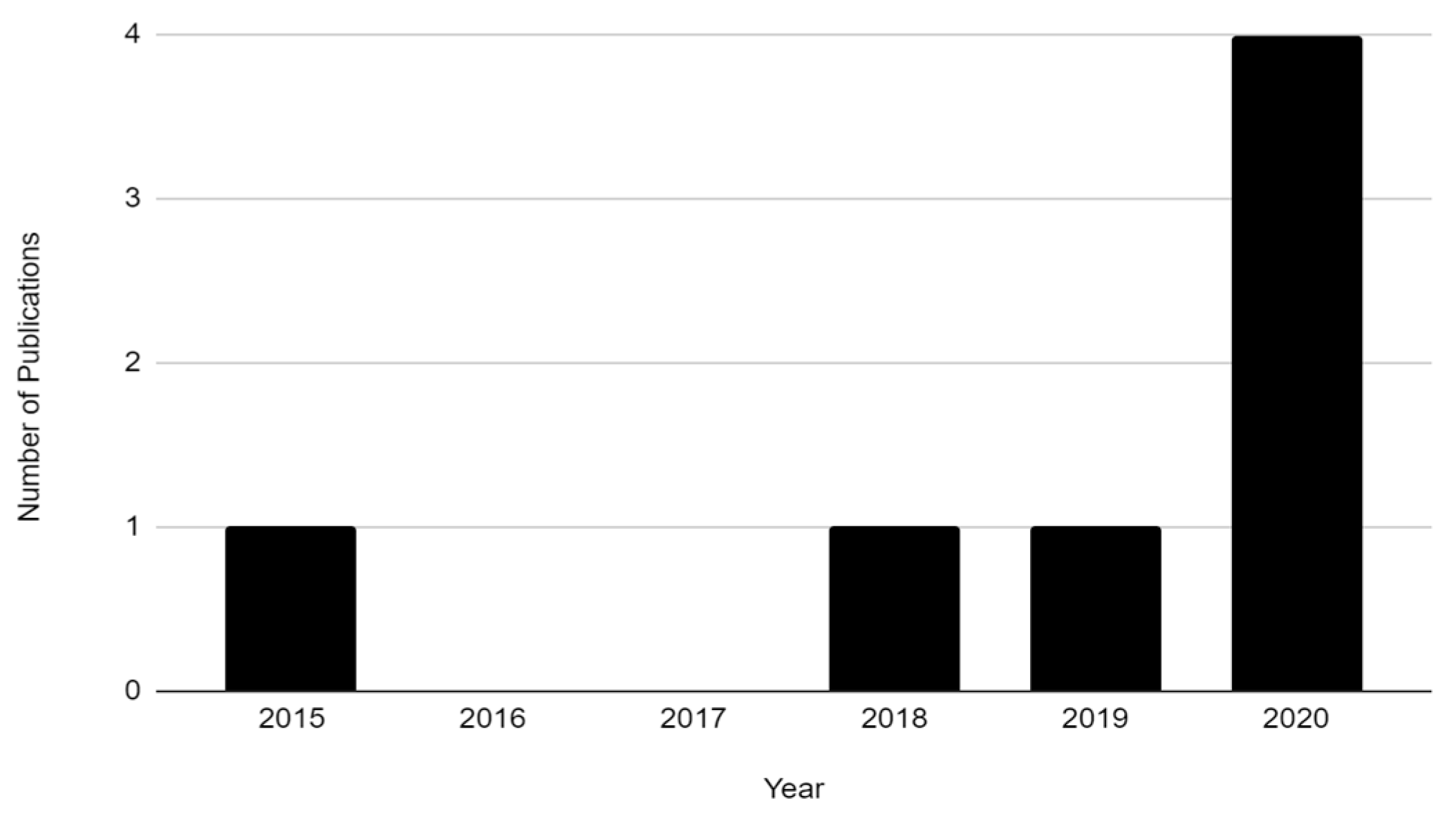
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hanif, M.I.; Iftikhar, L. Post COVID-19 Industrial Revolution 5.0: The dawn of Cobot, Chipbot and Curbot. Pak. J. Surg. Med. 2020, 1, 122–126. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A. Critical components of industry 5.0 towards a successful adoption in the field of manufacturing. J. Ind. Integr. Manag. 2020, 5, 327–348. [Google Scholar] [CrossRef]
- Demir, K.A.; Döven, G.; Sezen, B. Industry 5.0 and human-robot co-working. Procedia Comput. Sci. 2019, 158, 688–695. [Google Scholar] [CrossRef]
- Prati, E.; Peruzzini, M.; Pellicciari, M.; Raffaeli, R. How to include User eXperience in the design of human-robot interaction. Robot. Comput.-Integr. Manuf. 2020, 68, 102072. [Google Scholar] [CrossRef]
- Leng, J.; Sha, W.; Wang, B.; Zheng, P.; Zhuang, C.; Liu, Q.; Wuest, T.; Mourtzis, D.; Wang, L. Industry 5.0: Prospect and retrospect. J. Manuf. Syst. 2022, 65, 279–295. [Google Scholar] [CrossRef]
- Lu, Y.; Zheng, H.; Chand, S.; Xia, W.; Liu, Z.; Xu, X.; Wang, L.; Zhaojun, Q.; Jinsong, B. Outlook on human-centric manufacturing towards Industry 5.0. J. Manuf. Syst. 2022, 62, 612–627. [Google Scholar] [CrossRef]
- Schmidtler, J.; Knott, V.; Hölzel, C.; Bengler, K. Human centered assistance applications for the working environment of the future. Occup. Ergon. 2015, 12, 83–95. [Google Scholar] [CrossRef]
- Marvel, J.A.; Bagchi, S.; Zimmerman, M.; Antonishek, B. Towards effective interface designs for collaborative HRI in manufacturing: Metrics and measures. Trans. Hum.-Robot Interact. 2020, 9, 1–55. [Google Scholar] [CrossRef]
- Kooijmans, T.; Kanda, T.; Bartneck, C.; Ishiguro, H.; Hagita, N. Accelerating robot development through integral analysis of human-robot interaction. IEEE Trans. Robot. 2007, 23, 1001–1012. [Google Scholar] [CrossRef]
- Koh, L.; Orzes, G.; Jia, F. The fourth industrial revolution (Industry 4.0): Technologies disruption on operations and supply chain management. Int. J. Oper. Prod. Manag. 2019, 39, 817–828. [Google Scholar] [CrossRef]
- ISO 10218-2:2011; Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 2: Robot Systems and Integration. The International Organization for Standardization: Geneva, Switzerland, 2011.
- Galin, R.; Meshcheryakov, R.; Kamesheva, S.; Samoshina, A. Cobots and the benefits of their implementation in intelligent manufacturing. IOP Conf. Ser. Mater. Sci. Eng. 2020, 862, 032075. [Google Scholar] [CrossRef]
- Losey, D.P.; O’Malley, M.K. Enabling Robots to Infer how End-Users Teach and Learn through Human-Robot Interaction. IEEE Robot Autom Lett. 2019, 4, 1956–1963. [Google Scholar] [CrossRef] [Green Version]
- Breque, M.; De Nul, L.; Petridis, A. Industry 5.0: Towards a Sustainable, Human-Centric and Resilient European Industry; Publications Office of the European Union: Luxembourg, 2021. [Google Scholar]
- Robotiq. Collaborative Robot: Buyer’s Guide, 8th ed. 2020. Available online: https://blog.robotiq.com/collaborative-robot-ebook (accessed on 3 November 2022).
- Chowdhury, A.; Ahtinen, A.; Pieters, R.; Vaananen, K. User experience goals for designing industrial human-cobot collaboration: A case study of Franka Panda Robot. In Proceedings of the 11th Nordic Conference on Human-Computer Interaction: Shaping Experiences, Göteborg, Sweden, 26 October 2020. [Google Scholar] [CrossRef]
- ISO 9241-210:2019; Ergonomics of Human-System Interaction—Part 210: Human-Centred Design for Interactive Systems. The International Organization for Standardization: Geneva, Switzerland, 2010.
- Adikari, S.; McDonald, C.; Campbell, J. Quantitative analysis of desirability in user experience. In Proceedings of the 26th Australasian Conference on Information Systems, Melbourne, VIC, Australia, 4–7 June 2015; Available online: https://arxiv.org/abs/1606.03544 (accessed on 4 November 2022).
- Interaction Design Foundation. The Basics of User Experience Design. Available online: https://www.interaction-design.org/ebook (accessed on 3 November 2022).
- Tubin, C.; Mazuco Rodriguez, J.P.; de Marchi, A.C.B. User experience with conversational agent: A systematic review of assessment methods. Behav. Inf. Technol. 2021, 41, 1–11. [Google Scholar] [CrossRef]
- Hassenzahl, M. The Thing and I: Understanding the Relationship between User and Product. In Funology; Blythe, M.A., Overbeeke, K., Monk, A.F., Wright, P.C., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; Volume 3, pp. 301–313. [Google Scholar] [CrossRef]
- Hassenzahl, M.; Roto, V. Being and doing: A perspective on user experience and its measurement. Interfaces 2007, 72, 10–12. Available online: http://www.getcited.org/pub/101799932 (accessed on 5 November 2022).
- Hassenzahl, M. User Experience and Experience Design. In The Encyclopedia of Human-Computer Interaction, 2nd ed.; Interaction Design Foundation: Aarhus, Denmark, 2011; pp. 1–14. Available online: http://www.interaction-design.org/encyclopedia/user_experience_and_experience_design.html (accessed on 2 November 2022).
- Alenljung, B.; Lindblom, J.; Andreasson, R.; Ziemke, T. User experience in social human-robot interaction. Int. J. Ambient Comput. Intell. 2017, 8, 12–31. [Google Scholar] [CrossRef] [Green Version]
- Hassenzahl, M.; Tractinsky, N. User experience—A research agenda. Behav. Inf. Technol. 2006, 25, 91–97. [Google Scholar] [CrossRef]
- Olsson, T.; Väänänen-Vainio-Mattila, K.; Saari, T.; Lucero, A.; Arrasvuori, J. Reflections on experience-driven design: A case study on designing for playful experiences. In Proceedings of the 6th International Conference on Designing Pleasurable Products and Interfaces, Newcastle upon Tyne, UK, 3 September 2013. [Google Scholar] [CrossRef]
- Kaasinen, E.; Roto, V.; Hakulinen, J.; Heimonen, T.; Jokinen, J.P.P.; Karvonen, H.; Keskinen, T.; Koskinen, H.; Lu, Y.; Saariluoma, P.; et al. Defining user experience goals to guide the design of industrial systems. Behav. Inf. Technol. 2015, 34, 976–991. [Google Scholar] [CrossRef]
- Mahlke, S.; Thüring, M. Studying antecedents of emotional experiences in interactive contexts. In Proceedings of the SIGCHI conference on Human Factors in Computing Systems, New Orleans, LA, USA, 29 April 2007. [Google Scholar] [CrossRef]
- Carver, C.S.; Scheier, M.F. On the Structure of Behavioral Self-Regulation. In Handbook of Self-Regulation; Boekaerts, M., Pintrich, P.R., Zeidner, M., Eds.; Academic Press: Cambridge, MA, USA, 2020; Volume 3, pp. 41–84. [Google Scholar] [CrossRef]
- Klumpp, M.; Hesenius, M.; Meyer, O.; Ruiner, C.; Gruhn, V. Production logistics and human-computer interaction—State-of-the-art, challenges and requirements for the future. Int. J. Adv. Manuf. Technol. 2019, 105, 3691–3709. [Google Scholar] [CrossRef] [Green Version]
- Varsaluoma, J.; Karvonen, H.; Lu, Y. The fuzzy front end of experience design: Eliciting and communicating experience goals. In Proceedings of the Annual Meeting of the Australian Special Interest Group for Computer Human Interaction, Parkville, VIC, Australia, 7 December 2015. [Google Scholar] [CrossRef]
- Donato, H.; Donato, M. Stages for undertaking a systematic review. Acta Médica Port. 2019, 32, 227–235. [Google Scholar] [CrossRef] [Green Version]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G.; PRISMA Group. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. Ann. Intern. Med. 2009, 151, 264–269. [Google Scholar] [CrossRef] [Green Version]
- Murdoch University. Systematic Reviews—Research Guide: Using PICO or PICo. Available online: https://libguides.murdoch.edu.au/systematic/PICO (accessed on 4 November 2022).
- Pérez-Escoda, A. WOS e SCOPUS: Os grandes alidado de todo pesquisador. Rev. Comun. 2017, 11, e43911326884. [Google Scholar] [CrossRef]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: Explanation and elaboration. J. Clin. Epidemiol. 2009, 62, e1–e34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murali, P.K.; Darvish, K.; Mastrogiovanni, F. Deployment and evaluation of a flexible human–robot collaboration model based on AND/OR graphs in a manufacturing environment. Intell. Serv. Robot. 2020, 13, 439–457. [Google Scholar] [CrossRef]
- Aaltonen, I.; Salmi, T. Experiences and expectations of collaborative robots in industry and academia: Barriers and development needs. Procedia Manuf. 2019, 38, 1151–1158. [Google Scholar] [CrossRef]
- Arntz, A.; Eimler, S.C.; Hoppe, H.U. “The robot-arm talks back to me”—Human perception of augmented human-robot collaboration in virtual reality. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Virtual Reality (AIVR), Utrecht, The Netherlands, 14–18 December 2020. [Google Scholar] [CrossRef]
- Sauppé, A.; Mutlu, B. The social impact of a robot co-worker in industrial settings. In Proceedings of the 2015 Conference on Human Factors in Computing Systems, Seoul, Republic of Korea, 18 April 2015. [Google Scholar] [CrossRef]
- Terzioglu, Y.; Mutlu, B.; Sahin, E. Designing social cues for collaborative robots: The role of gaze and breathing in human-robot collaboration. proceedings of the 2020 15th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Cambridge, UK, 23–26 March 2020; pp. 343–357. [Google Scholar] [CrossRef] [Green Version]
- Kildal, J.; Tellaeche, A.; Fernandez, I.; Maurtua, I. Potential users’ key concerns and expectations for the adoption of cobots. Procedia CIRP 2018, 72, 21–26. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Keywords | Synonyms |
|---|---|
| Cobot | Cobotic |
| Human-robot interaction | |
| Human-interactive robot | |
| HRI | |
| Human-robot collaboration | |
| HRC | |
| Human-cobot interaction | |
| Human-collaborative robot | |
| HCI | |
| Collaborative robot | |
| Collaboration human-robot | |
| Human-robot collaborative workstation | |
| Co-robotic | |
| Design | Plan |
| Delineation | |
| Representation | |
| Model | |
| Proposal | |
| Method | |
| Framework | |
| Experience-driven design | |
| EDD | |
| User-centered/centred design | |
| Human-centered/centred design | |
| HCD | |
| Design thinking | |
| Interaction design | |
| Research through design | |
| RtD | |
| User experience design | |
| UXD | |
| User | Operator |
| Programmer | |
| Human controller | |
| Supervisor | |
| Facilitator | |
| Worker | |
| Teammate | |
| Human agent | |
| Experience | Sense |
| Understanding | |
| Perception | |
| Usability | |
| UX | |
| UE | |
| Emotion | |
| Feeling | |
| Event | |
| Impression | |
| Goal | Aim |
| Purpose | |
| Objective | |
| Target | |
| Intention | |
| Ambition | |
| Requirement | |
| Need/necessity | |
| Outcome | |
| Effect | |
| Value | |
| Task | |
| Accomplishment | |
| Safety | |
| Trust | |
| Fellowship | |
| Sympathy | |
| Inspiration | |
| Satisfying | |
| Enjoyable | |
| Fun | |
| Entertaining | |
| Helpful | |
| Motivating | |
| Aesthetically pleasing | |
| Supportive of creativity | |
| Rewarding | |
| Emotionally fulfilling |
| Reference | Sample | Research Design | Methods and Instruments | Barrier(s) to the UX Goals Application | Outcomes |
|---|---|---|---|---|---|
| [38] | 75 members of The Robotics Society | Quantitative | Webropol survey platform; online questionnaire | The most significant barrier was the lack of knowledge of, for example, potential applications, reference cases, safety legislation, and ease-of-use. | The most significant development needs were about new ways of allocating work between human workers and cobots, and safety technology. |
| [39] | 80 students | Qualitative | Content analysis | - | The benefits identified across all conditions were combined into the categories of efficiency, assistance, and relationship. |
| [16] | 22 millennials | Mixed method | Observations; semi-structured interviews, short version of User Experience Questionnaire | - | Four user experience goals were identified, namely fellowship and sympathy, inspiration, safety and trust, and accomplishment. |
| [42] | 140 participants | Qualitative | Hands-on demonstration; questionnaires | The main barriers identified included safety, cost, workers’ acceptance, and lack of knowledge. Some features expected in a cobot were a universal programming language, programming by demonstration, modularity, and safety features. | The main requirements were considered to be safety, usability, flexibility, and efficiency. |
| [37] | 10 employees at Schaeffler Group | Mixed method | Pick-and-place palletization task; Likert-scale questionnaires | - | The developed system ensured flexibility and comfort, enabling a fluent human-robot collaboration. |
| [40] | 17 manufacturing workers | Qualitative | Observations; semi-structured interviews | - | The themes that emerged from the analysis can be grouped into two key implications for the design of cobots, namely the importance of sociality and the need to support relationships with several stakeholders. |
| [41] | 72 students | Mixed method | Questionnaires; semi-structured interviews | - | The principles of appeal, secondary action, and arcing had a significant positive effect on most outcomes, improving robot perceptions and user experience. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duarte, I.M.; Pinto, A.; Carvalho, C.; Zornoza, A.; Santos, J. The Contribution of the User Experiences Goals for Designing Better Cobots: A Systematic Literature Review. Appl. Syst. Innov. 2022, 5, 119. https://doi.org/10.3390/asi5060119
Duarte IM, Pinto A, Carvalho C, Zornoza A, Santos J. The Contribution of the User Experiences Goals for Designing Better Cobots: A Systematic Literature Review. Applied System Innovation. 2022; 5(6):119. https://doi.org/10.3390/asi5060119
Chicago/Turabian StyleDuarte, Inês Margarida, Ana Pinto, Carla Carvalho, Ana Zornoza, and Joana Santos. 2022. "The Contribution of the User Experiences Goals for Designing Better Cobots: A Systematic Literature Review" Applied System Innovation 5, no. 6: 119. https://doi.org/10.3390/asi5060119