Intelligent Medical Velostat Pressure Sensor Mat Based on Artificial Neural Network and Arduino Embedded System

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
- The fabrication, method, and materials of the mat surface are described using simple facilities.
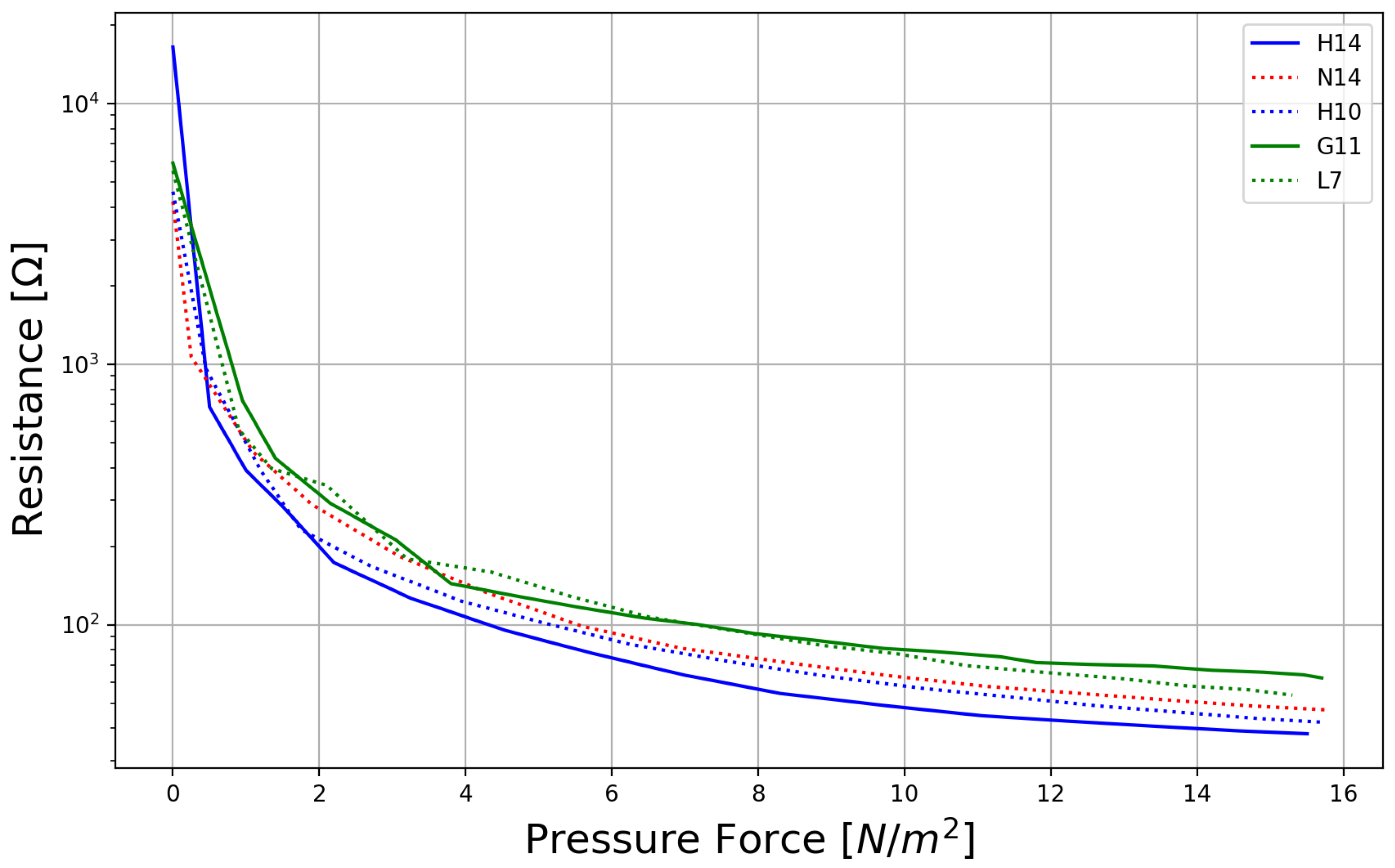
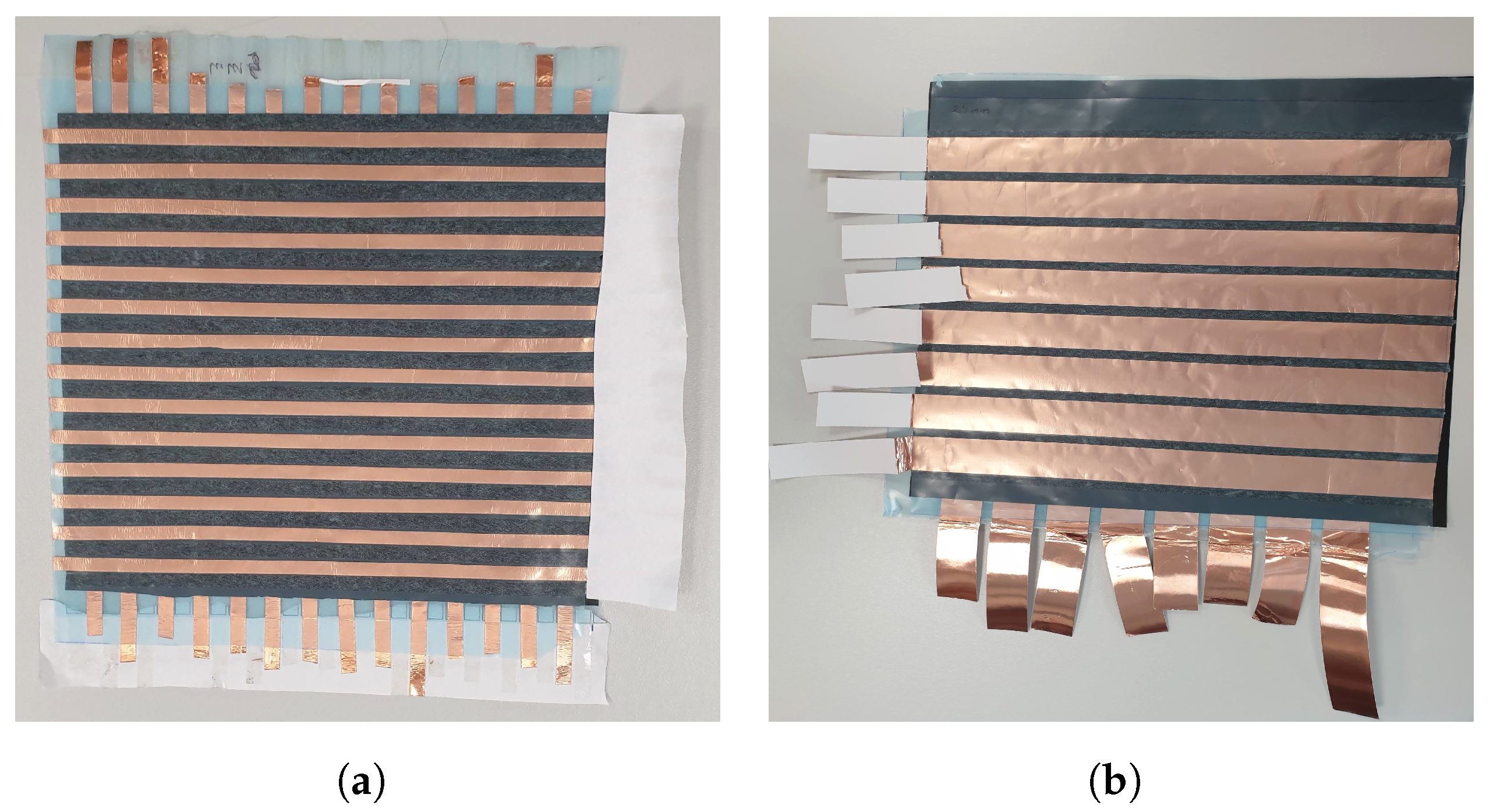
- The different design and geometry of homemade sensor mats (Figure 1a,b) are proposed to explore the electrical and mechanical properties, including repeatability, through the conducted tests.
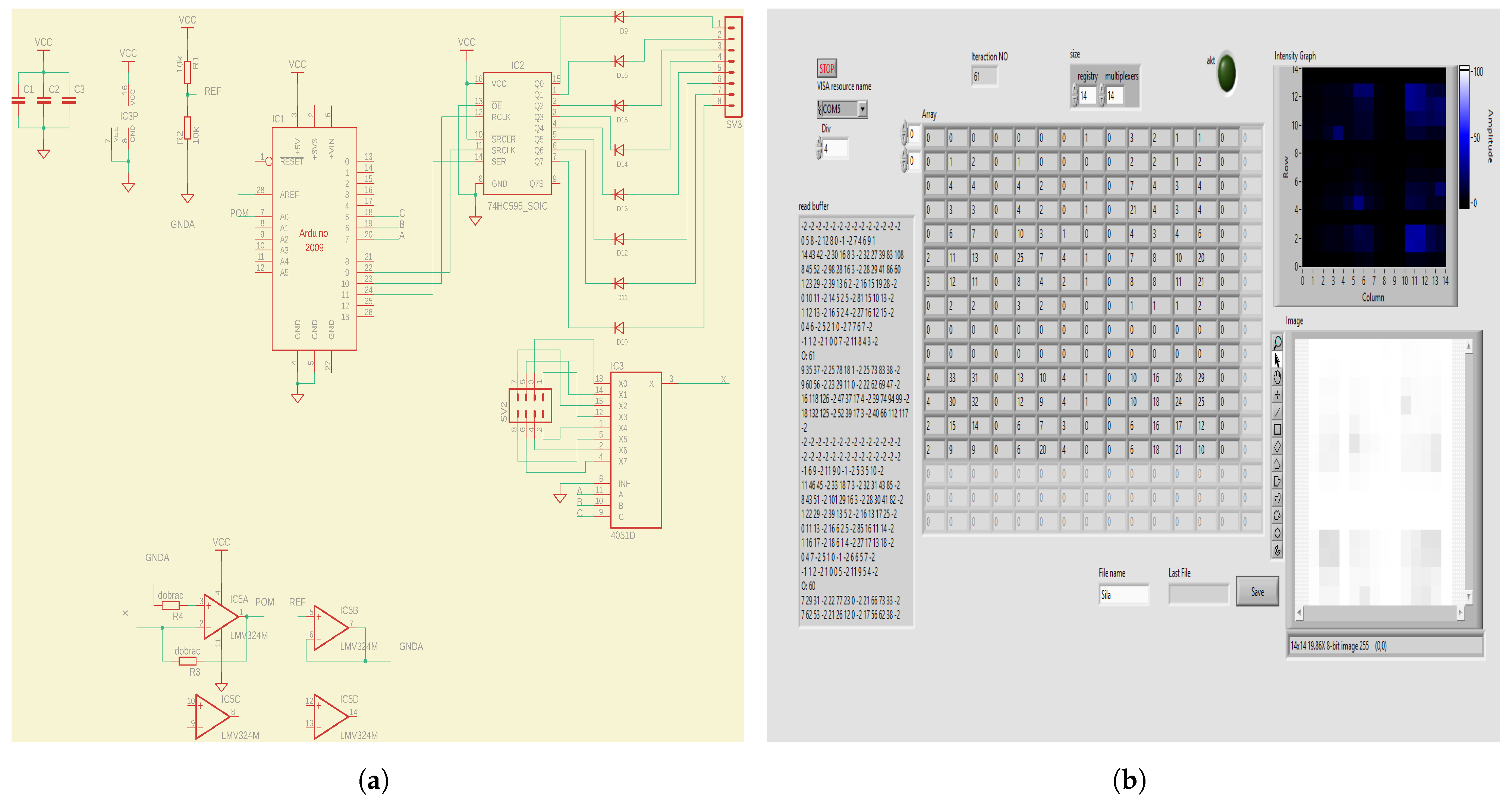
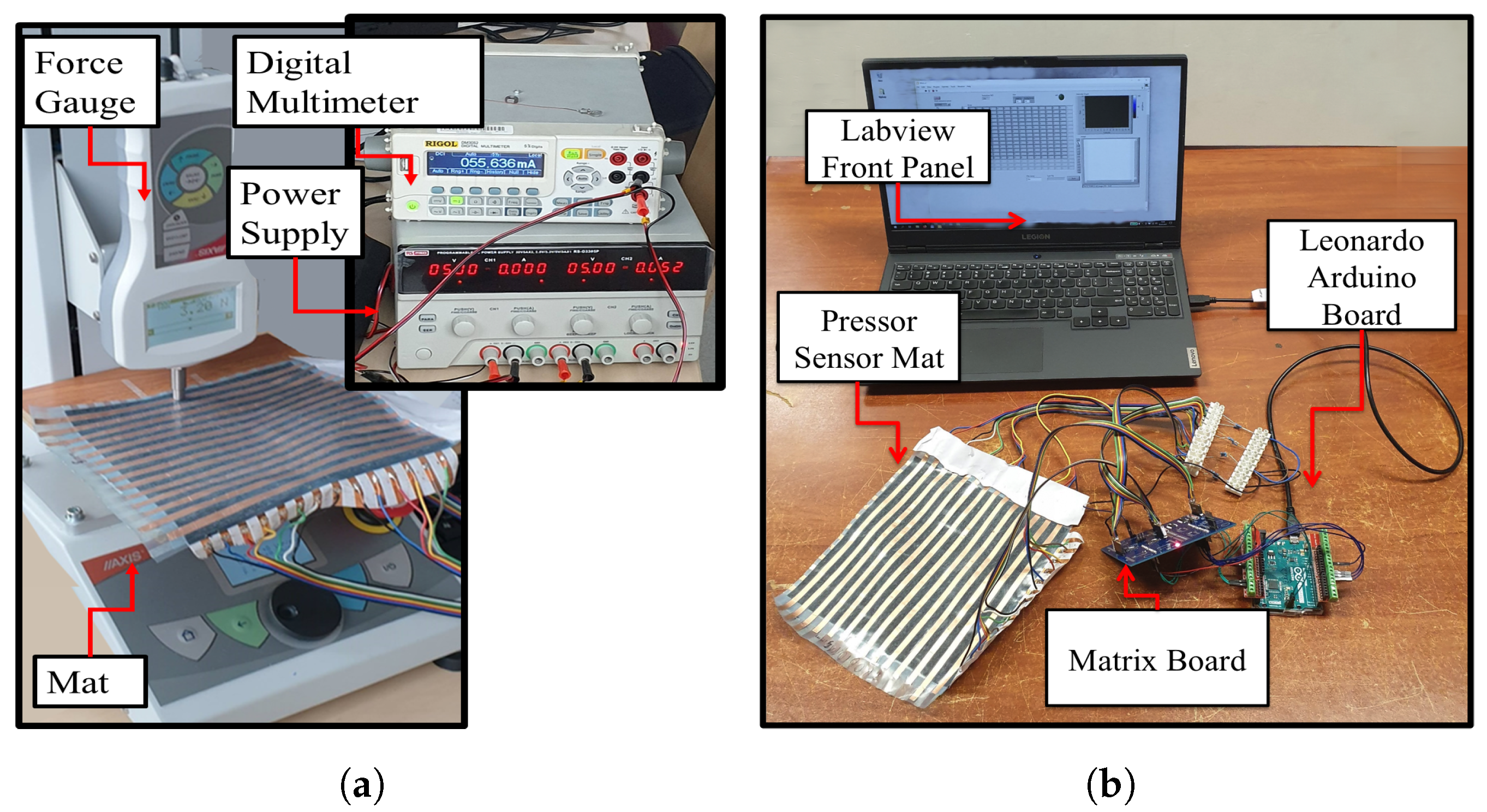
- A data acquisition system using software and an Arduino microcontroller is provided to automate the measurements of mat sensors in the test bench.
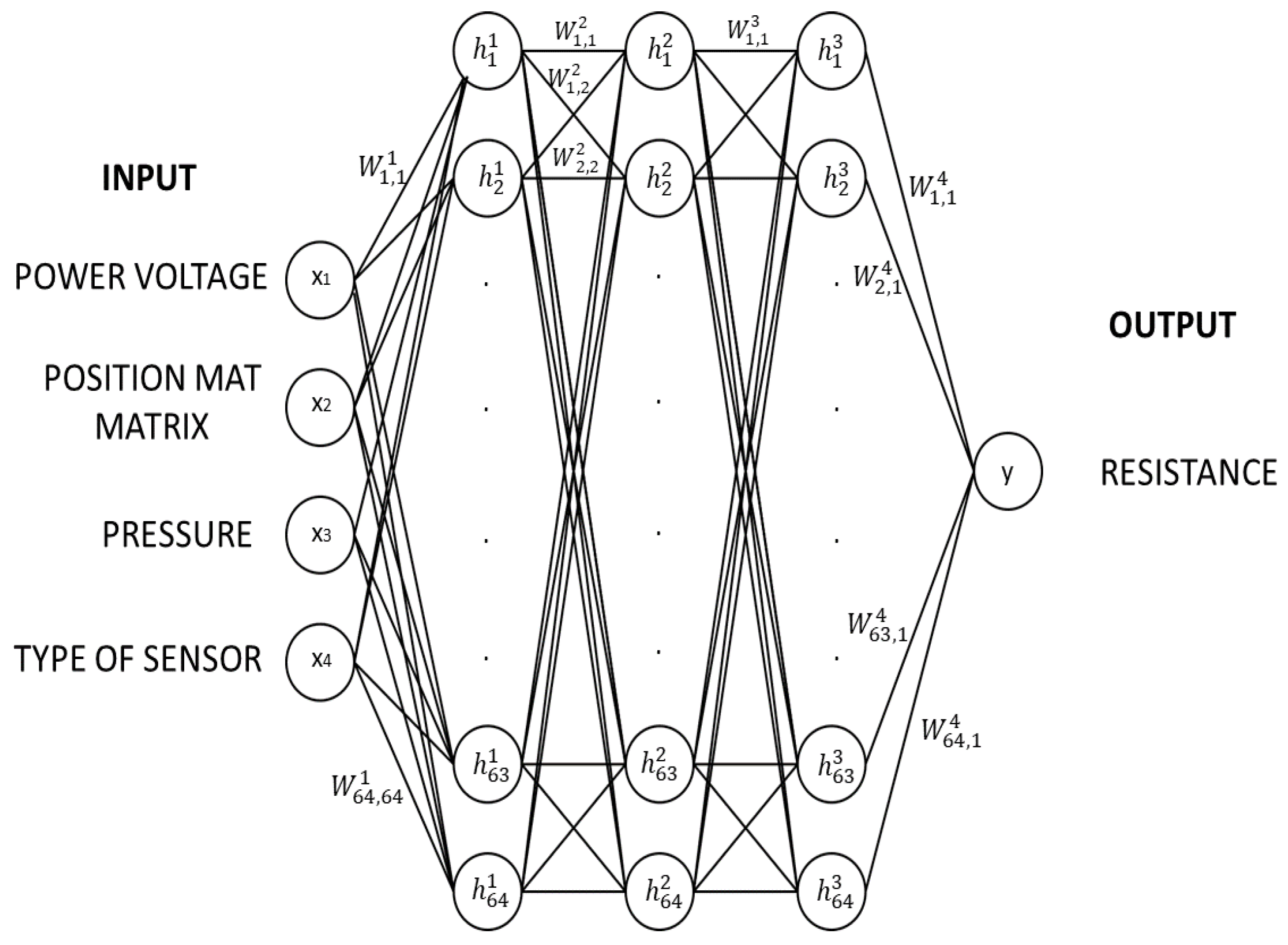
- Thus, the approximation method based on the neural network algorithm is developed to achieve a relation between the different geometries of mats, the pressure and voltages applied to the mat, the resistance of the conductive material, and the number of sensing cells.

2. Material
Mat Construction
3. Experimental Results
3.1. Measurements of Mat Pressure Sensor
3.1.1. First Experimental Test
- a wooden disc with a radius of 48.3 mm and thickness of 4 mm (Test1)
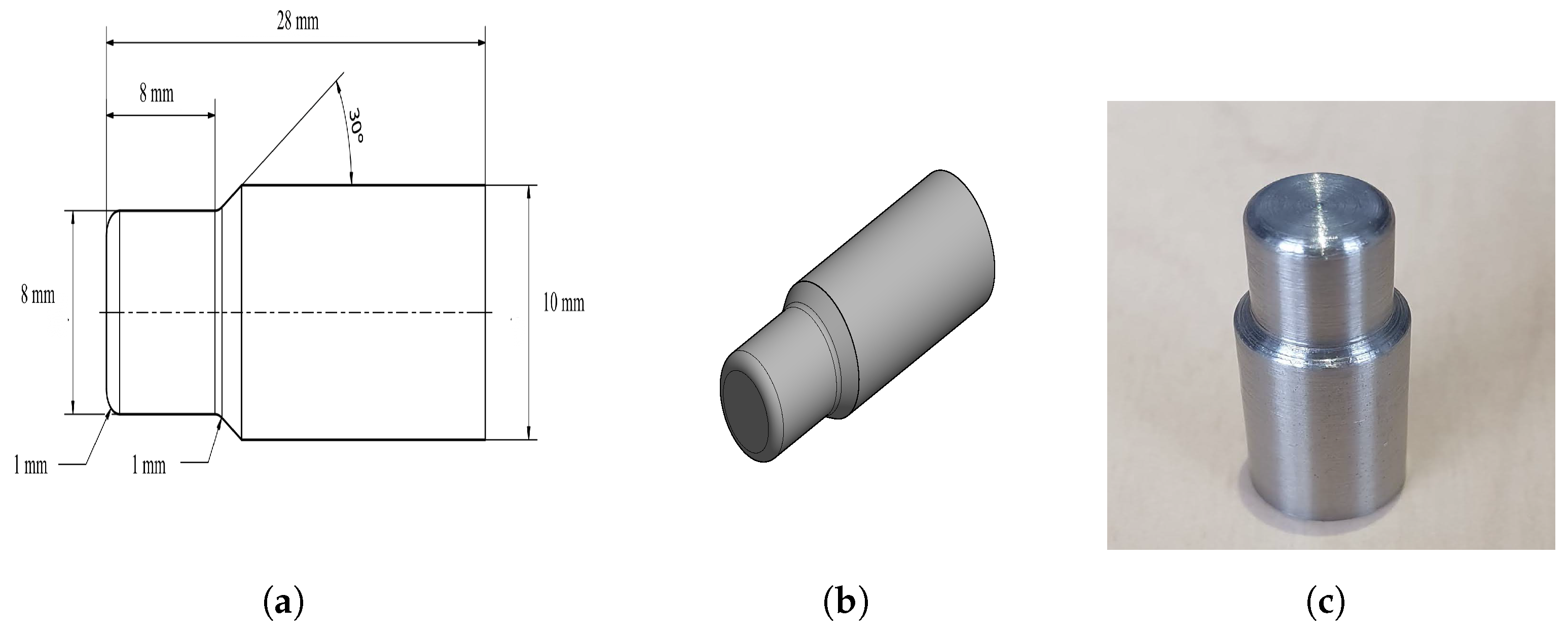
- a steel cylinder with a radius of 35.5 mm (Test2)
- a small sponge (Test3)

3.1.2. Second Experimental Test
3.1.3. Third Experimental Test
3.1.4. Fourth Experimental Test
- -
- number of rows and columns measurement
- -
- declaration of pin settings on the shift register, in case of a changing number of columns
- -
- position in the matrix
- -
- declaration of connection via UART
- -
- declaration of pin operation
4. Method
Neural Network Approach to the Sensor Mat
5. Results
Neural Networks Results
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Spook, S.M.; Koolhaas, W.; Bültmann, U.; Brouwer, S. Implementing sensor technology applications for workplace health promotion: A needs assessment among workers with physically demanding work. BMC Public Health 2019, 19, 1100. [Google Scholar] [CrossRef] [PubMed]
- Kciuk, M.; Bijok, T.; Lo Sciuto, G. Design and Modeling of Intelligent Building Office and Thermal Comfort Based on Probabilistic Neural Network. SN Comput. Sci. 2022, 3, 1–15. [Google Scholar] [CrossRef]
- Jin, Y.; Chen, G.; Lao, K.; Li, S.; Lu, Y.; Gan, Y.; Li, Z.; Hu, J.; Huang, J.; Wen, J.; et al. Identifying human body states by using a flexible integrated sensor. NPJ Flex. Electron. 2020, 4, 1–8. [Google Scholar] [CrossRef]
- de Fazio, R.; Perrone, E.; Velázquez, R.; De Vittorio, M.; Visconti, P. Development of a self-powered piezo-resistive smart insole equipped with low-power ble connectivity for remote gait monitoring. Sensors 2021, 21, 4539. [Google Scholar] [CrossRef] [PubMed]
- Dzedzickis, A.; Sutinys, E.; Bucinskas, V.; Samukaite-Bubniene, U.; Jakstys, B.; Ramanavicius, A.; Morkvenaite-Vilkonciene, I. Polyethylene-carbon composite (Velostat®) based tactile sensor. Polymers 2020, 12, 2905. [Google Scholar] [CrossRef] [PubMed]
- Han, J.W.; Park, J.; Kim, J.H.; Entifar, S.A.N.; Prameswati, A.; Wibowo, A.F.; Kim, S.; Lim, D.C.; Lee, J.; Moon, M.W.; et al. Stretchable and Conductive Cellulose/Conductive Polymer Composite Films for On-Skin Strain Sensors. Materials 2022, 15, 5009. [Google Scholar] [CrossRef] [PubMed]
- Tang, K.; Kumar, A.; Nadeem, M.; Maaz, I. CNN-based smart sleep posture recognition system. IoT 2021, 2, 119–139. [Google Scholar] [CrossRef]
- Esposito, D.; Centracchio, J.; Andreozzi, E.; Bifulco, P.; Gargiulo, G.D. Design and Evaluation of a Low-Cost Electromechanical System to Test Dynamic Performance of Force Sensors at Low Frequencies. Machines 2022, 10, 1017. [Google Scholar] [CrossRef]
- Veeramuthu, L.; Venkatesan, M.; Benas, J.S.; Cho, C.J.; Lee, C.C.; Lieu, F.K.; Lin, J.H.; Lee, R.H.; Kuo, C.C. Recent progress in conducting polymer composite/nanofiber-based strain and pressure sensors. Polymers 2021, 13, 4281. [Google Scholar] [CrossRef] [PubMed]
- Nascimento, D.H.A.; Magalhães, F.A.; Sabino, G.S.; Resende, R.A.; Duarte, M.L.M.; Vimieiro, C.B.S. Development of a Human Motion Analysis System Based on Sensorized Insoles and Machine Learning Algorithms for Gait Evaluation. Inventions 2022, 7, 98. [Google Scholar] [CrossRef]
- Martinez-Cesteros, J.; Medrano-Sanchez, C.; Plaza-Garcia, I.; Igual-Catalan, R.; Albiol-Pérez, S. A Velostat-Based Pressure-Sensitive Mat for Center-of-Pressure Measurements: A Preliminary Study. Int. J. Environ. Res. Public Health 2021, 18, 5958. [Google Scholar] [CrossRef] [PubMed]
- van Donselaar, R.; Chen, W. Design of a smart textile mat to study pressure distribution on multiple foam material configurations. In Proceedings of the 4th International Symposium on Applied Sciences in Biomedical and Communication Technologies, Barcelona, Spain, 26–29 October 2011; pp. 1–5. [Google Scholar]
- Li, E.; Lin, X.; Seet, B.C.; Joseph, F.; Neville, J. Low profile and low cost textile smart mat for step pressure sensing and position mapping. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand, 20–23 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Bucinskas, V.; Dzedzickis, A.; Rozene, J.; Subaciute-Zemaitiene, J.; Satkauskas, I.; Uvarovas, V.; Bobina, R.; Morkvenaite-Vilkonciene, I. Wearable feet pressure sensor for human gait and falling diagnosis. Sensors 2021, 21, 5240. [Google Scholar] [CrossRef] [PubMed]
- Cui, X.; Huang, F.; Zhang, X.; Song, P.; Zheng, H.; Chevali, V.; Wang, H.; Xu, Z. Flexible pressure sensors via engineering microstructures for wearable human-machine interaction and health monitoring applications. IScience 2022, 25, 104148. [Google Scholar] [CrossRef] [PubMed]
- Hudec, R.; Matúška, S.; Kamencay, P.; Benco, M. A smart IoT system for detecting the position of a lying person using a novel textile pressure sensor. Sensors 2020, 21, 206. [Google Scholar] [CrossRef] [PubMed]
- Yuan, L.; Li, J. Smart cushion based on pressure sensor array for human sitting posture recognition. In Proceedings of the 2021 IEEE Sensors; IEEE: Piscataway, NJ, USA, 2021; pp. 1–4. [Google Scholar]
- Xu, W.; Li, Z.; Huang, M.C.; Amini, N.; Sarrafzadeh, M. ecushion: An etextile device for sitting posture monitoring. In Proceedings of the 2011 International Conference on Body Sensor Networks; IEEE: Piscataway, NJ, USA, 2011; pp. 194–199. [Google Scholar]
- Kyvelidou, A.; Harbourne, R.T.; Shostrom, V.K.; Stergiou, N. Reliability of center of pressure measures for assessing the development of sitting postural control in infants with or at risk of cerebral palsy. Arch. Phys. Med. Rehabil. 2010, 91, 1593–1601. [Google Scholar] [CrossRef] [PubMed]
- Bennett, S.; Ren, Z.; Goubran, R.; Rockwood, K.; Knoefel, F. In-bed mobility monitoring using pressure sensors. IEEE Trans. Instrum. Meas. 2015, 64, 2110–2120. [Google Scholar] [CrossRef]
- Tomasic, I.; Petrović, N.; Fotouhi, H.; Lindén, M.; Björkman, M. Data flow and collection for remote patients monitoring: From wireless sensors through a relational database to a web interface in real time. In Proceedings of the EMBEC & NBC 2017: Joint Conference of the European Medical and Biological Engineering Conference (EMBEC) and the Nordic-Baltic Conference on Biomedical Engineering and Medical Physics (NBC), Tampere, Finland, 11–15 June 2017; Springer: Berlin/Heidelberg, Germany, 2018; pp. 89–92. [Google Scholar]
- Yuan, L.; Qu, H.; Li, J. Velostat sensor array for object recognition. IEEE Sens. J. 2021, 22, 1692–1704. [Google Scholar] [CrossRef]
- Alinia, P.; Samadani, A.; Milosevic, M.; Ghasemzadeh, H.; Parvaneh, S. Pervasive lying posture tracking. Sensors 2020, 20, 5953. [Google Scholar] [CrossRef] [PubMed]
- Adafruit 1361. Botland-Botland Website. Available online: https://botland.com.pl/czujniki-nacisku/5014-membrana-przewodzaca-do-pomiaru-sily-nacisku-adafruit-1361-5903351249782.html?cd=1050025856&ad=50530953494&kd=&gclid=Cj0KCQiAmaibBhCAARIsAKUlaKTcTg59nzf4ZqZtV8HA5U0ZgUJgm2soAl0A9va7cFGrRUrRUdtRC28aAnzFEALw_wcB (accessed on 1 January 2021).
- IEC 60601-2-52:2009; Medical Electrical Equipment-Part 2-52: Particular Requirements for the Basic Safety and Essential Performance of Medical Beds. 2009. Available online: https://www.iso.org/obp/ui/en/#iso:std:iec:60601:-2-52:ed-1:v1:en (accessed on 1 January 2022).
- Safe Working Load Test on Medical Beds Safe Working Load Test on Medical Beds. Available online: https://www.itcindia.org/safe-working-load-test-on-medical-beds/ (accessed on 30 September 2010).
- What Is the Weight Capacity of a Hospital Bed? Available online: https://www.medstrom.com/solution/what-is-the-weight-capacity-of-a-hospital-bed/ (accessed on 30 September 2010).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Details | Adafruit 1361 Velostat |
|---|---|
| Membrane dimensions | 280 mm × 280 mm |
| Membrane thickness | 4 mil/0.1 mm |
| Weight | approx. 18.66 g |
| Working Temperature | from −45 C to +65 C (−50 F to 150 F) |
| Heat sealable | Yes |
| Longitudinal resistance | <500 /cm |
| Surface resistivity | 31,000 /cm |
| Safe Working Load (SWL) [N] | Mass |
|---|---|
| 1350 | patient of 135 kg |
| 200 | mattress of 20 kg |
| 450 | accessories of weighing 45 kg |
| Velostat Pressure Sensing Mat | n.1 | n.2 |
| Transparent Plastic [cm] | 21.5 × 17.5 | 16 × 11 |
| Copper Tape Conductive Adhesive [cm] | 0.5 × 20 | 2.5 × 34.5 |
| Number of Copper Tapes | 14 | 8 |
| Insulation Tape Adhesive [cm] | 0.4 × 17 | 0.4 × 30.5 |
| Number of Insulation Tapes | 15 | 9 |
| Velostat Conductive Sheet [cm] | 17 × 17 | 30.5 × 30.5 |
| i/j | 1 | 2 | … | 64 |
| 1 | −0.23 | −0.67 | … | −0.31 |
| 2 | 0.03 | 0.17 | … | −0.04 |
| … | … | … | … | … |
| 4 | −0.37 | 0.53 | … | −0.33 |
| i/j | 1 | 2 | … | 64 |
| 1 | 0.12 | −0.44 | … | −0.08 |
| 2 | 0.36 | 1.22 | … | 0.33 |
| … | … | … | … | … |
| 64 | 0.19 | 0.45 | … | 0.2 |
| i/j | 1 | 2 | … | 64 |
| 1 | −1.03 | −0.33 | … | 0.55 |
| 2 | −0.17 | −0.39 | … | −0.06 |
| … | … | … | … | … |
| 64 | −0.32 | −0.66 | … | −0.13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kciuk, M.; Kowalik, Z.; Lo Sciuto, G.; Sławski, S.; Mastrostefano, S. Intelligent Medical Velostat Pressure Sensor Mat Based on Artificial Neural Network and Arduino Embedded System. Appl. Syst. Innov. 2023, 6, 84. https://doi.org/10.3390/asi6050084
Kciuk M, Kowalik Z, Lo Sciuto G, Sławski S, Mastrostefano S. Intelligent Medical Velostat Pressure Sensor Mat Based on Artificial Neural Network and Arduino Embedded System. Applied System Innovation. 2023; 6(5):84. https://doi.org/10.3390/asi6050084
Chicago/Turabian StyleKciuk, Marek, Zygmunt Kowalik, Grazia Lo Sciuto, Sebastian Sławski, and Stefano Mastrostefano. 2023. "Intelligent Medical Velostat Pressure Sensor Mat Based on Artificial Neural Network and Arduino Embedded System" Applied System Innovation 6, no. 5: 84. https://doi.org/10.3390/asi6050084
APA StyleKciuk, M., Kowalik, Z., Lo Sciuto, G., Sławski, S., & Mastrostefano, S. (2023). Intelligent Medical Velostat Pressure Sensor Mat Based on Artificial Neural Network and Arduino Embedded System. Applied System Innovation, 6(5), 84. https://doi.org/10.3390/asi6050084