Investigating the Influence of Fluid-Structure Interactions on Nonlinear System Identification



Abstract
:1. Introduction
2. Theoretical Study
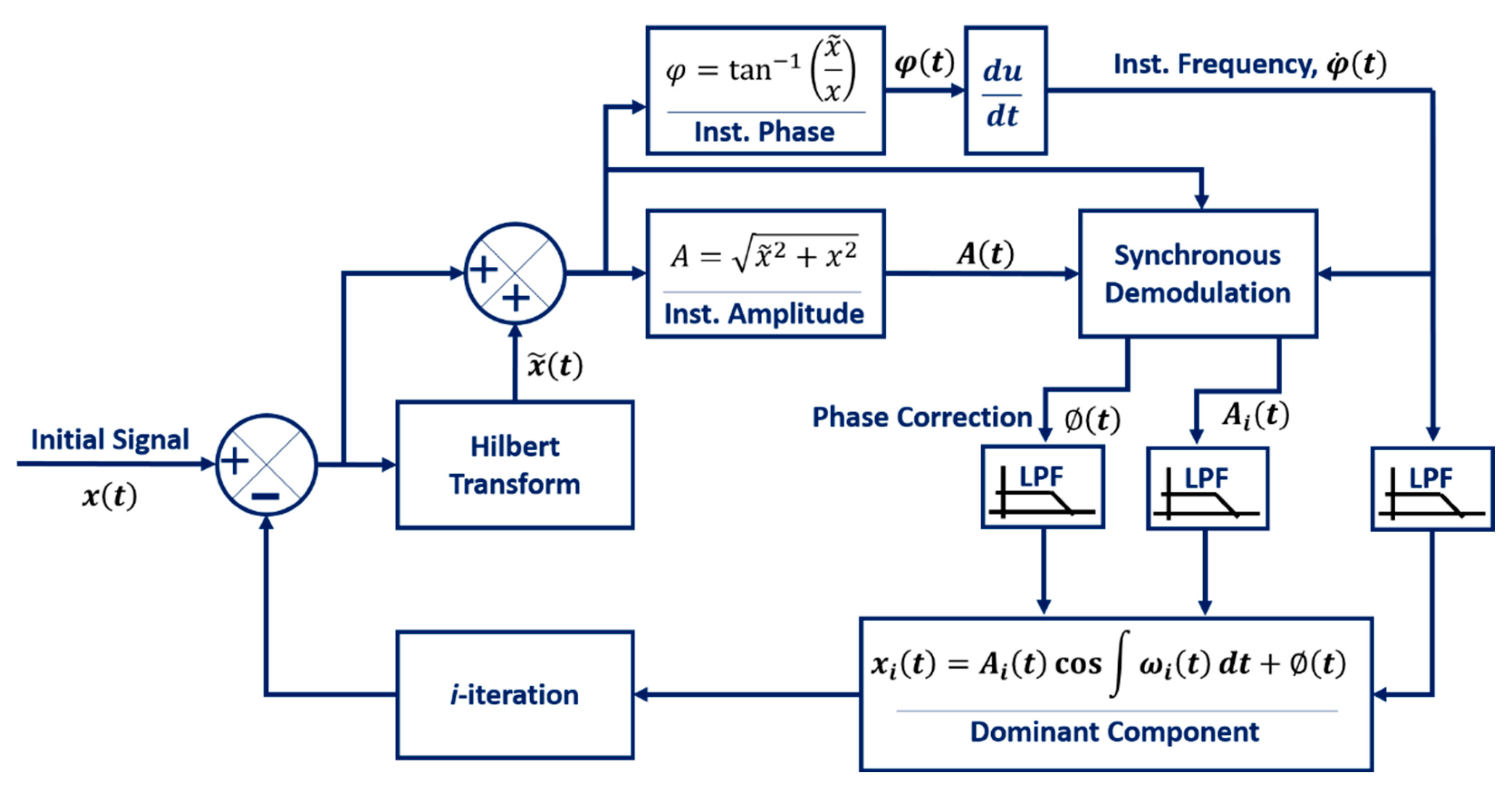
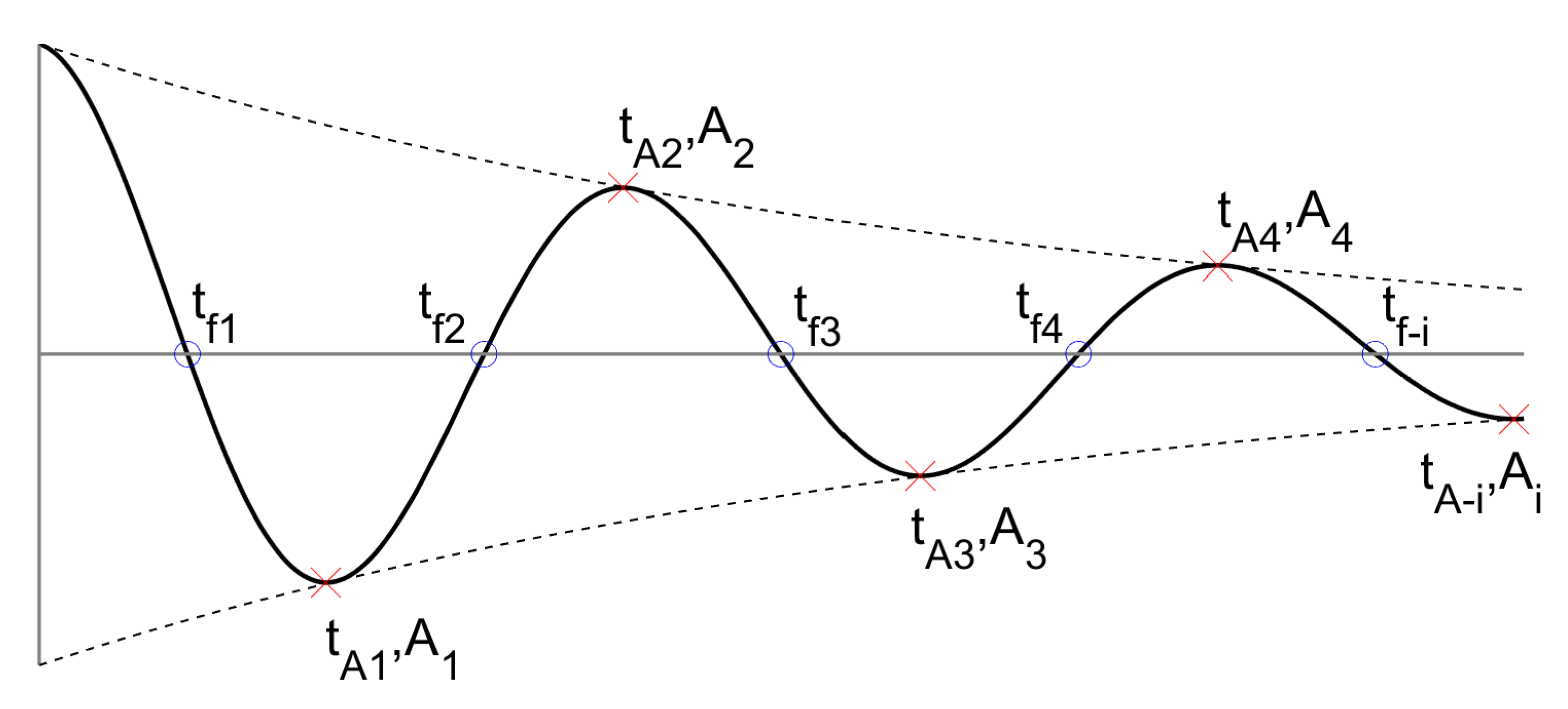
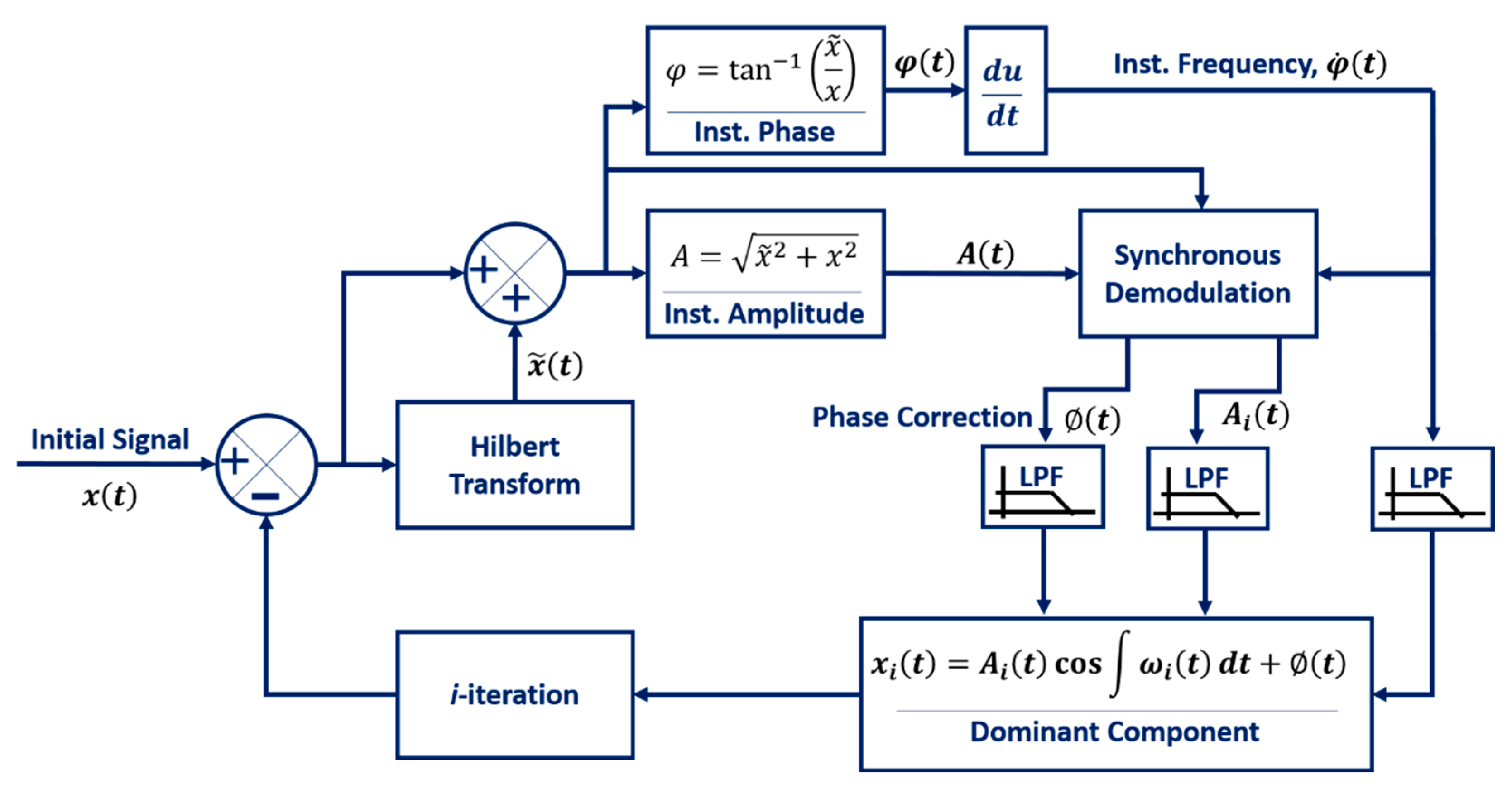
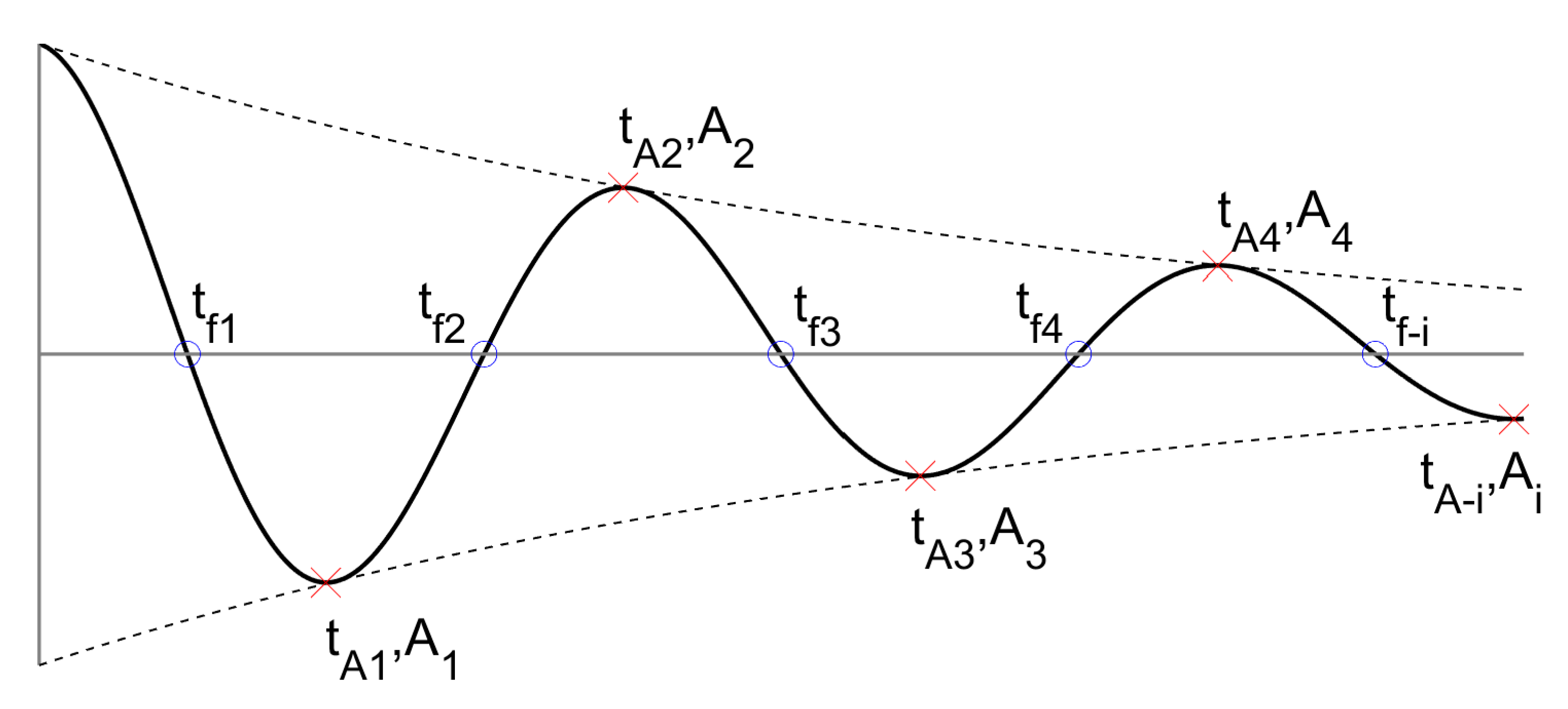
2.1. Vibration Decomposition
2.2. Nonlinear Identification
3. Materials and Methods
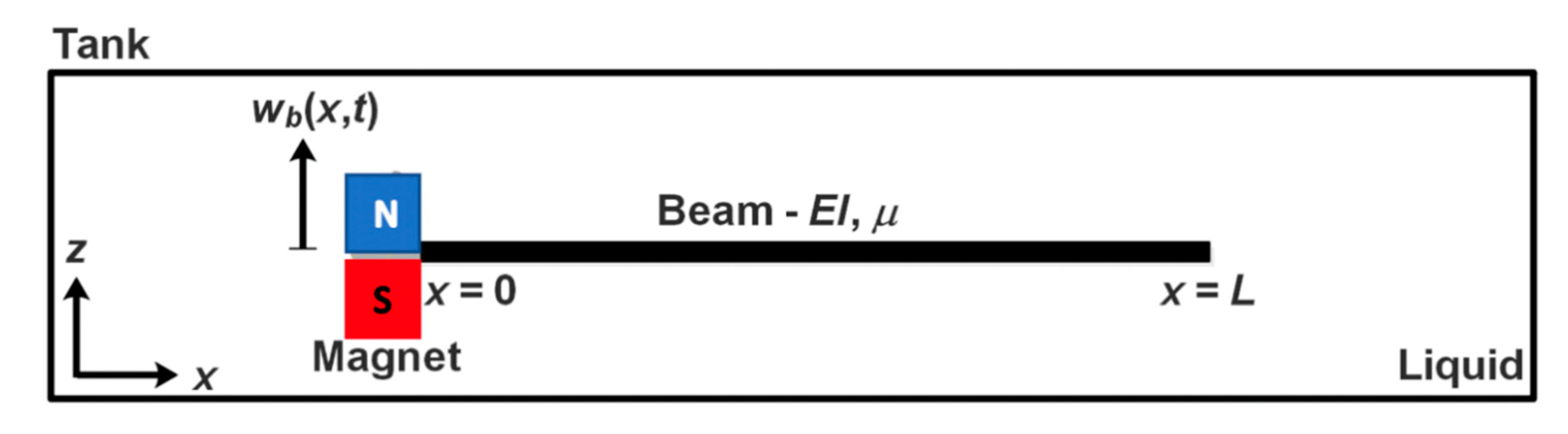
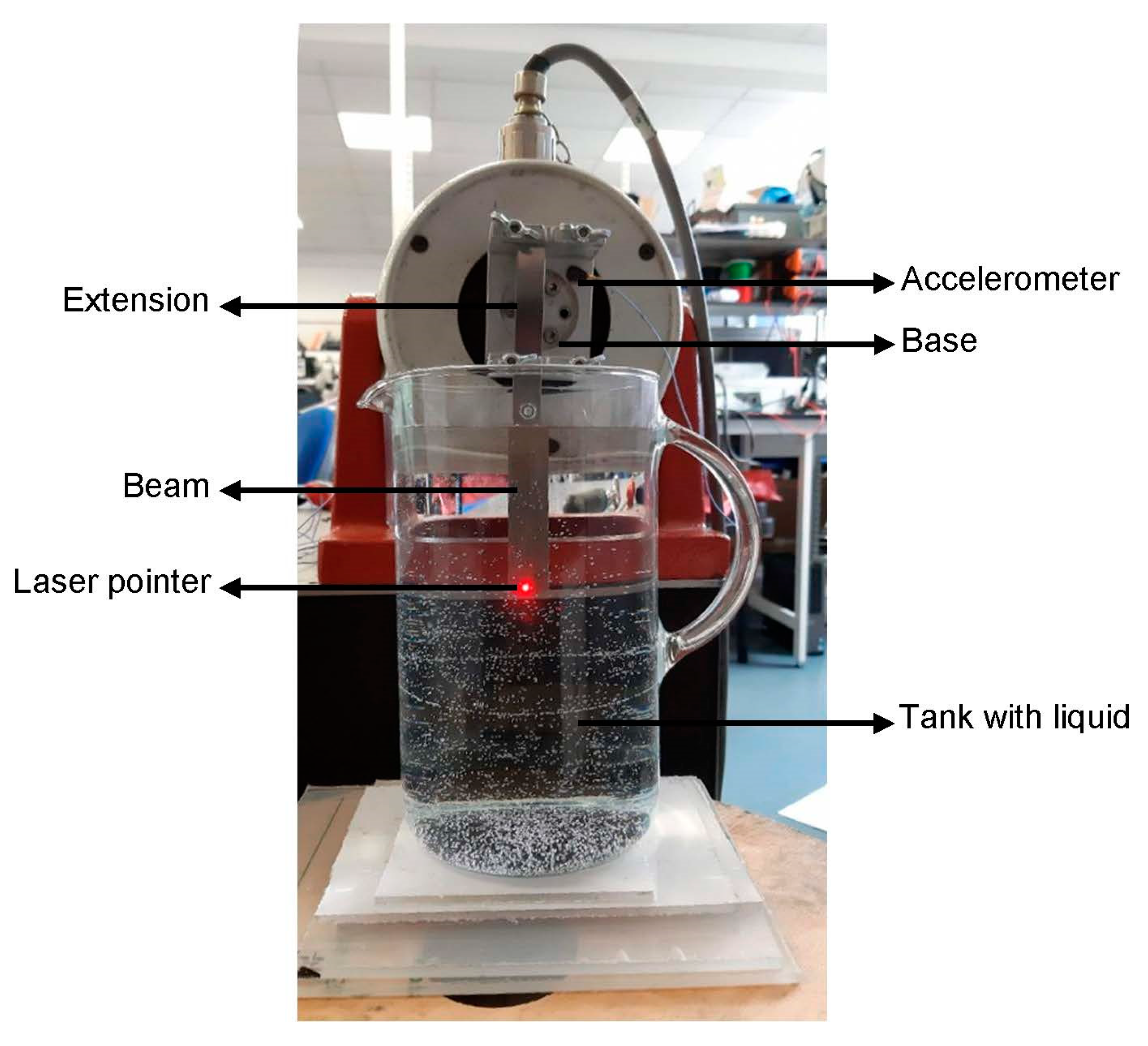
3.1. Experimental Setup
3.2. Numerical Simulation
4. Nonlinear System Identification
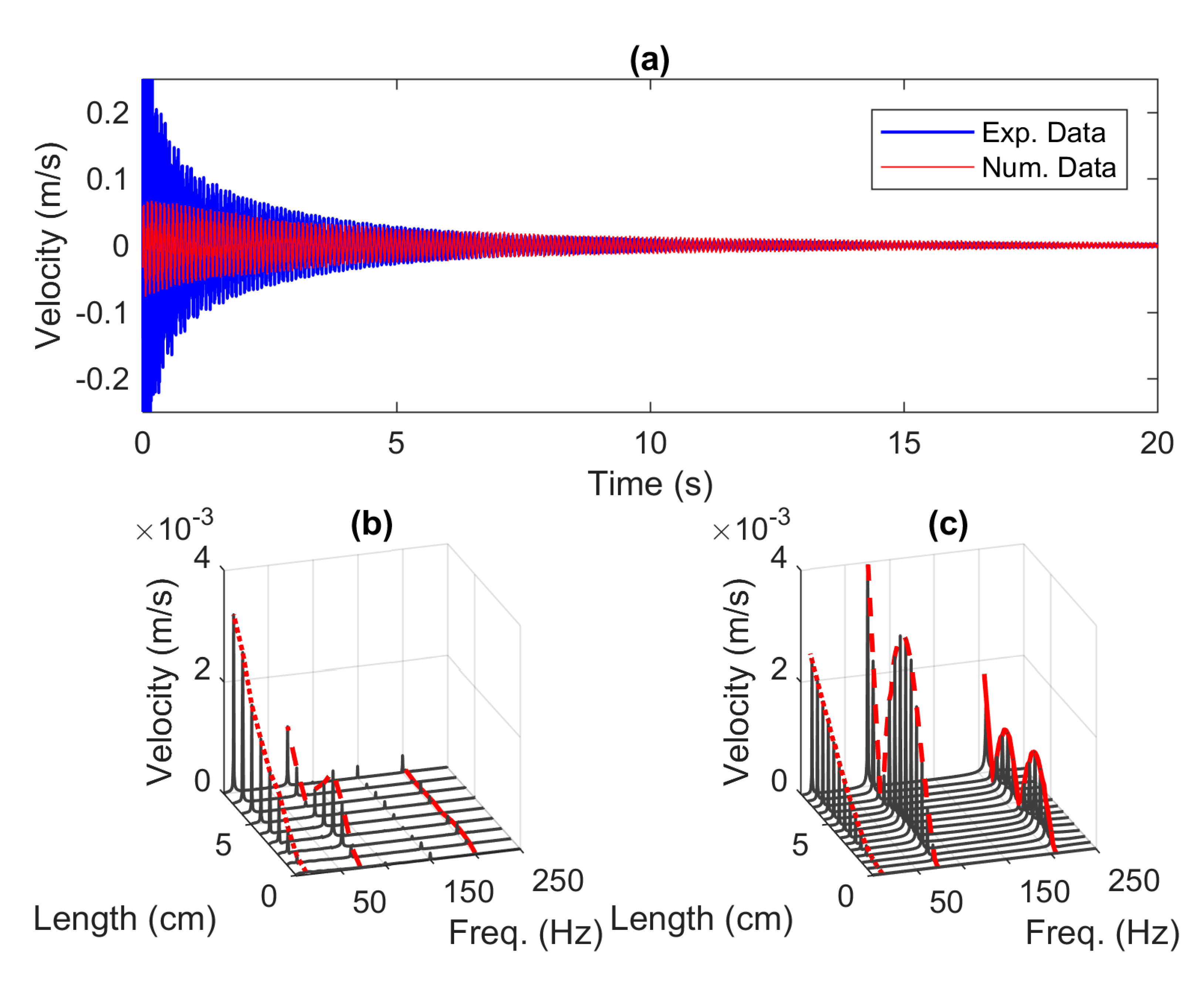
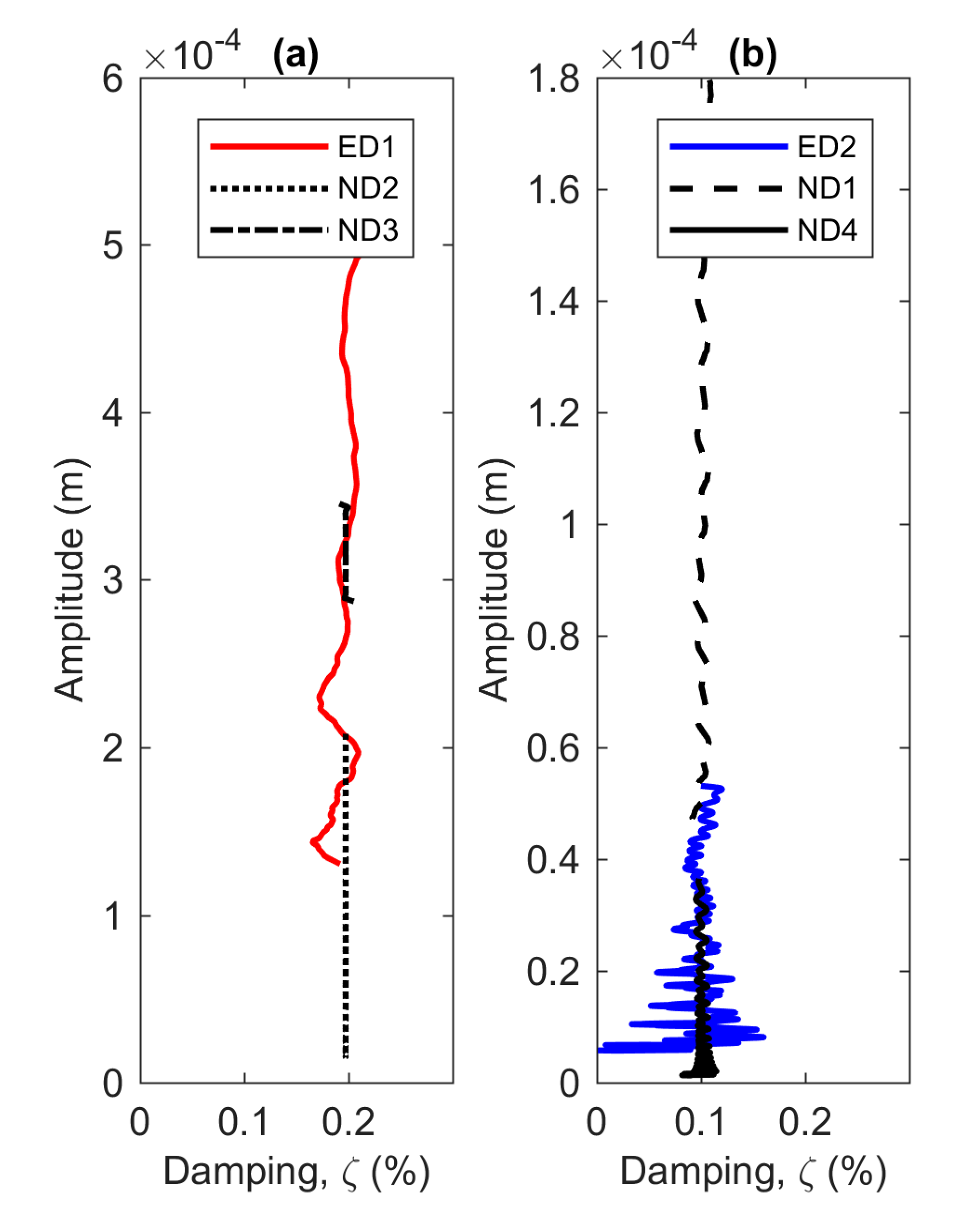
4.1. Dry Model Analysis
4.2. Wet Model Analysis
5. Analytical Approximation Methods
5.1. Analytical Model
5.2. Validation of Natural Frequencies
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Avirovik, D.; Malladi, V.V.N.S.; Priya, S.; Tarazaga, P.A. Theoretical and experimental correlation of mechanical wave formation on beams. J. Intell. Mater. Syst. Struct. 2016, 27, 1939–1948. [Google Scholar] [CrossRef]
- Mashimo, T. Miniature preload mechanisms for a micro ultrasonic motor. Sens. Actuators A Phys. 2017, 257, 106–112. [Google Scholar] [CrossRef]
- Ramananarivo, S.; Godoy-Diana, R.; Thiria, B. Passive elastic mechanism to mimic fish-muscle action in anguilliform swimming. J. R. Soc. Interface 2013, 10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, G.; Zhang, W. Travelling-Wave Micropumps. In Micro Electro Mechanical System; Micro/Nano Technologies; Springer: Singapore, 2017; Volume 2, pp. 1–19. [Google Scholar] [CrossRef]
- Ye, W.; Liu, G.; Wang, C.; Li, W.; Yue, Z.; Zhang, W. Travelling wave magnetic valveless micropump driven by rotating integrated magnetic arrays. Micro AMP Nano Lett. 2014, 9, 232–234. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, C.; Yue, Z.; Zhan, C.N.; Geng, W.D.; Liu, G.H. Travelling-wave piezoelectric micropump with low resistance microchannel. Electron. Lett. 2011, 47. [Google Scholar] [CrossRef]
- Ghommem, M.; Najar, F.; Arabi, M.; Abdel-Rahman, E.; Yavuz, M. A unified model for electrostatic sensors in fluid media. Nonlinear Dyn. 2020. [Google Scholar] [CrossRef]
- Shabani, R.; Hatami, H.; Golzar, F.G.; Tariverdilo, S.; Rezazadeh, G. Coupled vibration of a cantilever micro-beam submerged in a bounded incompressible fluid domain. Acta Mech. 2012, 224, 841–850. [Google Scholar] [CrossRef]
- Benra, F.-K.; Dohmen, H.J.; Pei, J.; Schuster, S.; Wan, B. A Comparison of One-Way and Two-Way Coupling Methods for Numerical Analysis of Fluid-Structure Interactions. J. Appl. Math. 2011, 2011, 1–16. [Google Scholar] [CrossRef]
- Erturk, A.; Delporte, G. Underwater thrust and power generation using flexible piezoelectric composites: An experimental investigation toward self-powered swimmer-sensor platforms. Smart Mater. Struct. 2011, 20. [Google Scholar] [CrossRef]
- Jeong, Y.D.; Lee, J.H. Passive locomotion of freely movable flexible fins near the ground. J. Fluids Struct. 2018, 82, 1–15. [Google Scholar] [CrossRef]
- Koushesh, A. Added Mass Formulation for Fluid-Structure Interaction. Master’s Thesis, American University of Sarjah, Sarjah, UAE, 2016. [Google Scholar]
- Xiu, H.; Davis, R.B.; Romeo, R.C. Edge clearance effects on the added mass and damping of beams submerged in viscous fluids. J. Fluids Struct. 2018, 83, 194–217. [Google Scholar] [CrossRef]
- Kaneko, S.; Nakamura, T.; Inada, F.; Kato, M.; Ishihara, K.; Nishihara, T.; Mureithi, N.; Langthjem, M. Flow-Induced Vibrations, 2nd ed.; Academic Press: Cambridge, UK, 2014. [Google Scholar] [CrossRef]
- Païdoussis, M.P. Fluid-Structure Interactions, 2nd ed.; Slender Structures and Axial Flow; Academic Press: Cambridge, UK, 2016; Volume 2. [Google Scholar] [CrossRef]
- Taylor, G.I. Analysis of the swimming of long and narrow animals. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1952, 214, 158–183. [Google Scholar] [CrossRef]
- Hatami, H.; Bagheri, A.; Ansari, R. An Analytical Investigation for Vibration Characteristics of a Beam-Type Liquid Micro-Pump. Int. J. Appl. Mech. 2020, 12. [Google Scholar] [CrossRef]
- Hou, J.; Wang, H.; Xu, D.; Jankowski, Ł.; Wang, P. Damage Identification Based on Adding Mass for Liquid–Solid Coupling Structures. Appl. Sci. 2020, 10, 2312. [Google Scholar] [CrossRef] [Green Version]
- Piñeirua, M.; Godoy-Diana, R.; Thiria, B. Resistive thrust production can be as crucial as added mass mechanisms for inertial undulatory swimmers. Phys. Rev. E 2015, 92. [Google Scholar] [CrossRef] [Green Version]
- Cen, L.; Erturk, A. Bio-inspired aquatic robotics by untethered piezohydroelastic actuation. Bioinspir. Biomim. 2013, 8. [Google Scholar] [CrossRef] [Green Version]
- Ramananarivo, S.; Godoy-Diana, R.; Thiria, B. Propagating waves in bounded elastic media: Transition from standing waves to anguilliform kinematics. EPL 2014, 105. [Google Scholar] [CrossRef]
- Kohtanen, E.A.; Davis, R.B. Hydroelastic damping of low aspect ratio cantilevered plates. J. Fluids Struct. 2019, 90, 315–333. [Google Scholar] [CrossRef]
- Shahab, S.; Tan, D.; Erturk, A. Hydrodynamic thrust generation and power consumption investigations for piezoelectric fins with different aspect ratios. Eur. Phys. J. Spec. Top. 2015, 224, 3419–3434. [Google Scholar] [CrossRef]
- Monette, C.; Nennemann, B.; Seeley, C.; Coutu, A.; Marmont, H. Hydro-dynamic damping theory in flowing water. IOP Conf. Ser. Earth Environ. Sci. 2014, 22. [Google Scholar] [CrossRef]
- Wang, Y.; Masoumi, M.; Gaucher-Petitdemange, M. Damping analysis of a flexible cantilever beam containing an internal fluid channel: Experiment, modeling and analysis. J. Sound Vib. 2015, 340, 331–342. [Google Scholar] [CrossRef]
- Inman, D.J. Engineering Vibrations, 4th ed.; Pearson: Hong Kong, China, 2013. [Google Scholar]
- Rao, S.S. Mechanical Vibration, 5th ed.; Pearson: Hong Kong, China, 2010. [Google Scholar]
- Hosoya, N.; Kajiwara, I.; Umenai, K.; Maeda, S. Dynamic characterizations of underwater structures using noncontact vibration tests based on nanosecond laser ablation in water: Evaluation of passive vibration suppression with damping materials. J. Vib. Control 2017, 24, 3714–3725. [Google Scholar] [CrossRef]
- Vu, V.H.; Thomas, M.; Lakis, A.A.; Marcouiller, L. Effect of Added Mass on Submerged Vibrated Plates. In Proceedings of the 25th Seminar on Machinery Vibration; Canadian Machinery Vibration Association (CMVA 7): Saint John, NB, Canada, 2007; pp. 40–41. [Google Scholar]
- Liu, X.; Luo, Y.; Karney, B.W.; Wang, Z.; Zhai, L. Virtual testing for modal and damping ratio identification of submerged structures using the PolyMAX algorithm with two-way fluid–structure Interactions. J. Fluids Struct. 2015, 54, 548–565. [Google Scholar] [CrossRef]
- Londoño, J.M.; Neild, S.A.; Cooper, J.E. Identification of backbone curves of nonlinear systems from resonance decay responses. J. Sound Vib. 2015, 348, 224–238. [Google Scholar] [CrossRef] [Green Version]
- Naylor, S.; Platten, M.F.; Wright, J.R.; Cooper, J.E. Identification of Multi-Degree of Freedom Systems With Nonproportional Damping Using the Resonant Decay Method. J. Vib. Acoust. 2004, 126, 298–306. [Google Scholar] [CrossRef]
- Feldman, M. Time-varying vibration decomposition and analysis based on the Hilbert transform. J. Sound Vib. 2006, 295, 518–530. [Google Scholar] [CrossRef]
- Feldman, M. Hilbert transform in vibration analysis. Mech. Syst. Signal. Process. 2011, 25, 735–802. [Google Scholar] [CrossRef]
- Feldman, M. Hilbert Transform. Applications in Mechanical Vibration; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Sumali, H.; Kellog, R.A. Calculating Damping from Ring-Down Using Hilbert Transform and Curve Fitting. In Proceedings of the 4th International Operational Modal Analysis Conference (IOMAC), Istanbul, Turkey, 9–11 May 2011. [Google Scholar]
- Rao, S.S. Vibration of Continuous Systems, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Bachmann, H.; Ammann, W.J.; Deischl, F.; Eisenmann, J.; Floegl, I.; Hirsch, G.H.; Klein, G.K.; Lande, G.J.; Mahrenholtz, O.; Natke, H.G.; et al. Vibration Problems in Structures; Birkhäuser Basel: Basel, Switzerland, 1995. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. An experimentally validated bimorph cantilever model for piezoelectric energy harvesting from base excitations. Smart Mater. Struct. 2009, 18. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. On Mechanical Modeling of Cantilevered Piezoelectric Vibration Energy Harvesters. J. Intell. Mater. Syst. Struct. 2008, 19, 1311–1325. [Google Scholar] [CrossRef]
- Wagg, D.; Neild, S. Nonlinear Vibration with Control: For Flexible and Adaptive Structures, 2nd ed.; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar] [CrossRef]
- Hoffait, S.; Marin, F.; Simon, D.; Peeters, B.; Golinval, J.-C. Measured-based shaker model to virtually simulate vibration sine test. Case Stud. Mech. Syst. Signal. Process. 2016, 4, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Tiwari, N.; Puri, A.; Saraswat, A. Lumped parameter modelling and methodology for extraction of model parameters for an electrodynamic shaker. J. Low Freq. Noise Vib. Act. Control. 2017, 36, 99–115. [Google Scholar] [CrossRef]
- Syuhri, S.N.H.; McCartney, A.; Cammarano, A. Development of an Experimental Rig for Emulating Undulatory Locomotion. In Nonlinear Structures & Systems, Proceedings of the Society for Experimental Mechanics Series, IMAC XXXVII, Houston, TX, USA, 10–13 February 2020; Springer: Cham, Switzerland, 2020; Volume 1, pp. 253–263. [Google Scholar] [CrossRef]
- Mezghani, F.; Del Rincón, A.F.; Souf, M.A.B.; Fernandez, P.G.; Chaari, F.; Viadero Rueda, F.; Haddar, M. Identification of nonlinear anti-vibration isolator properties. Comptes Rendus Mécanique 2017, 345, 386–398. [Google Scholar] [CrossRef]
- Buchak, P.; Eloy, C.; Reis, P.M. The Clapping Book: Wind-Driven Oscillations in a Stack of Elastic Sheets. Phys. Rev. Lett. 2010, 105. [Google Scholar] [CrossRef] [PubMed] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
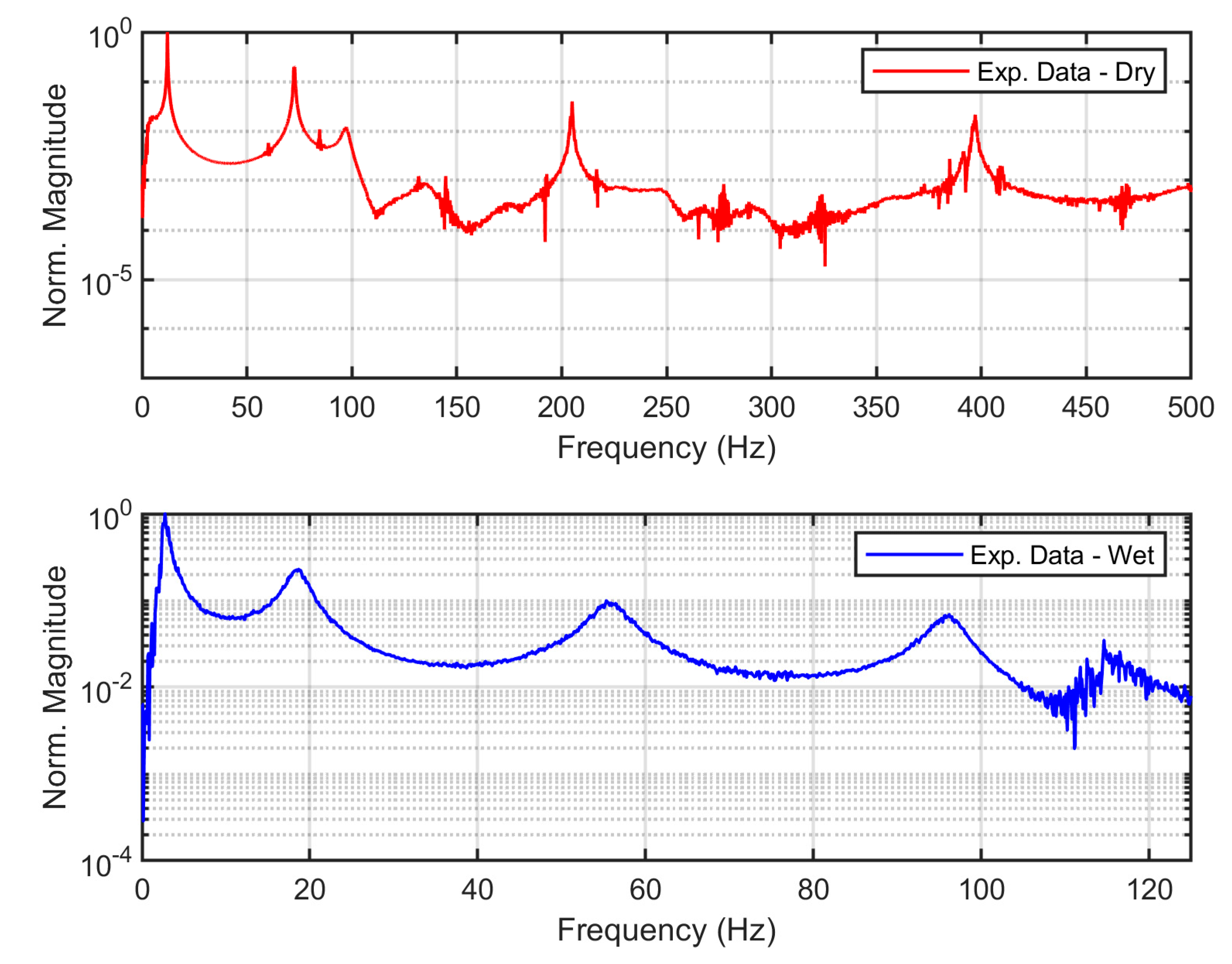
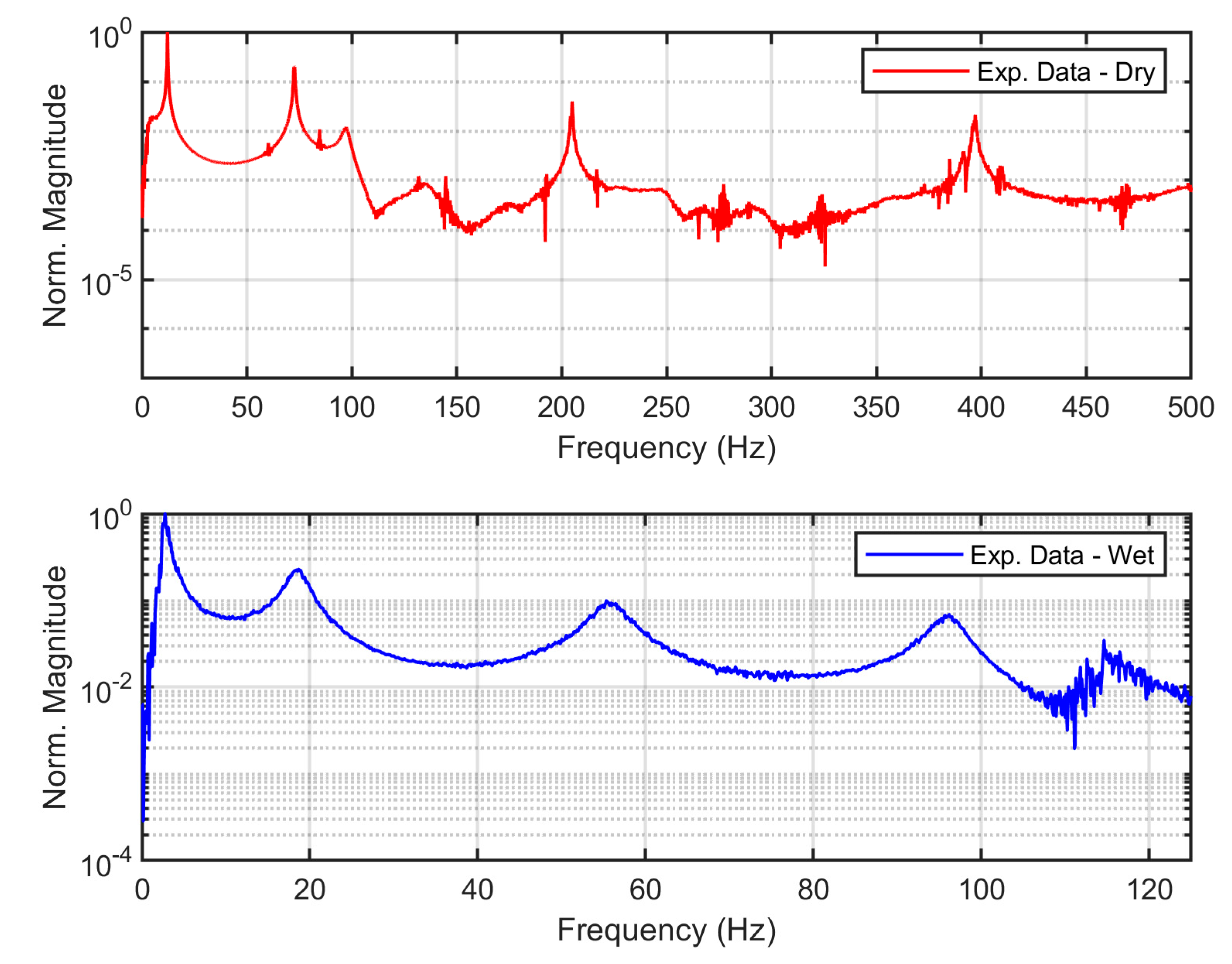
| Dry | ||
| Exp. (Hz) | Calc. (Hz) | Error (%) |
| 12.0313 | 11.5328 | 4.1431 |
| 71.9531 | 72.2747 | 0.4469 |
| 202.2656 | 202.3712 | 0.0522 |
| 393.7500 | 396.5668 | 0.7154 |
| Wet | ||
| Exp. (Hz) | Calc. (Hz) | Error (%) |
| 2.7344 | 2.6935 | 1.4947 |
| 18.6719 | 16.8799 | 9.5972 |
| 55.3125 | 47.2642 | 14.5506 |
| 96.1719 | 92.6190 | 3.6943 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Syuhri, S.N.H.; Zare-Behtash, H.; Cammarano, A. Investigating the Influence of Fluid-Structure Interactions on Nonlinear System Identification. Vibration 2020, 3, 521-544. https://doi.org/10.3390/vibration3040032
Syuhri SNH, Zare-Behtash H, Cammarano A. Investigating the Influence of Fluid-Structure Interactions on Nonlinear System Identification. Vibration. 2020; 3(4):521-544. https://doi.org/10.3390/vibration3040032
Chicago/Turabian StyleSyuhri, Skriptyan N. H., Hossein Zare-Behtash, and Andrea Cammarano. 2020. "Investigating the Influence of Fluid-Structure Interactions on Nonlinear System Identification" Vibration 3, no. 4: 521-544. https://doi.org/10.3390/vibration3040032
APA StyleSyuhri, S. N. H., Zare-Behtash, H., & Cammarano, A. (2020). Investigating the Influence of Fluid-Structure Interactions on Nonlinear System Identification. Vibration, 3(4), 521-544. https://doi.org/10.3390/vibration3040032