



Analysis of Whole-Body Vibration Using Electric Powered Wheelchairs on Surface Transitions


Abstract
:1. Introduction
- To analyze WBV exposure in a commercial EPW, using passive suspension, when traversing different surfaces thresholds.
- o
- EPWs incorporate a similar suspension to manual wheelchairs in addition to their weight; hence we hypothesize that WBV measures in EPWs would be over the health safety zone of 1-h exposure on surface thresholds.
- o
- Additionally, WBV measures may increase with threshold height.
- To compare different types of suspension systems in EPW to minimize WBV exposure on different surface thresholds.
- o
- With the assumption that EPWs are exposed to vibration levels over the health guidance caution zone; we proposed a novel EPW with active suspension to ameliorate vibration exposure when facing different surface thresholds.
- o
- Alternatively, we hypothesized that active suspension in EPWs may reduce vibration and increase comfort on surface thresholds compared with the passive suspension presented in commercial EPWs.
2. Materials and Methods
2.1. Instrumentation
2.2. Protocol
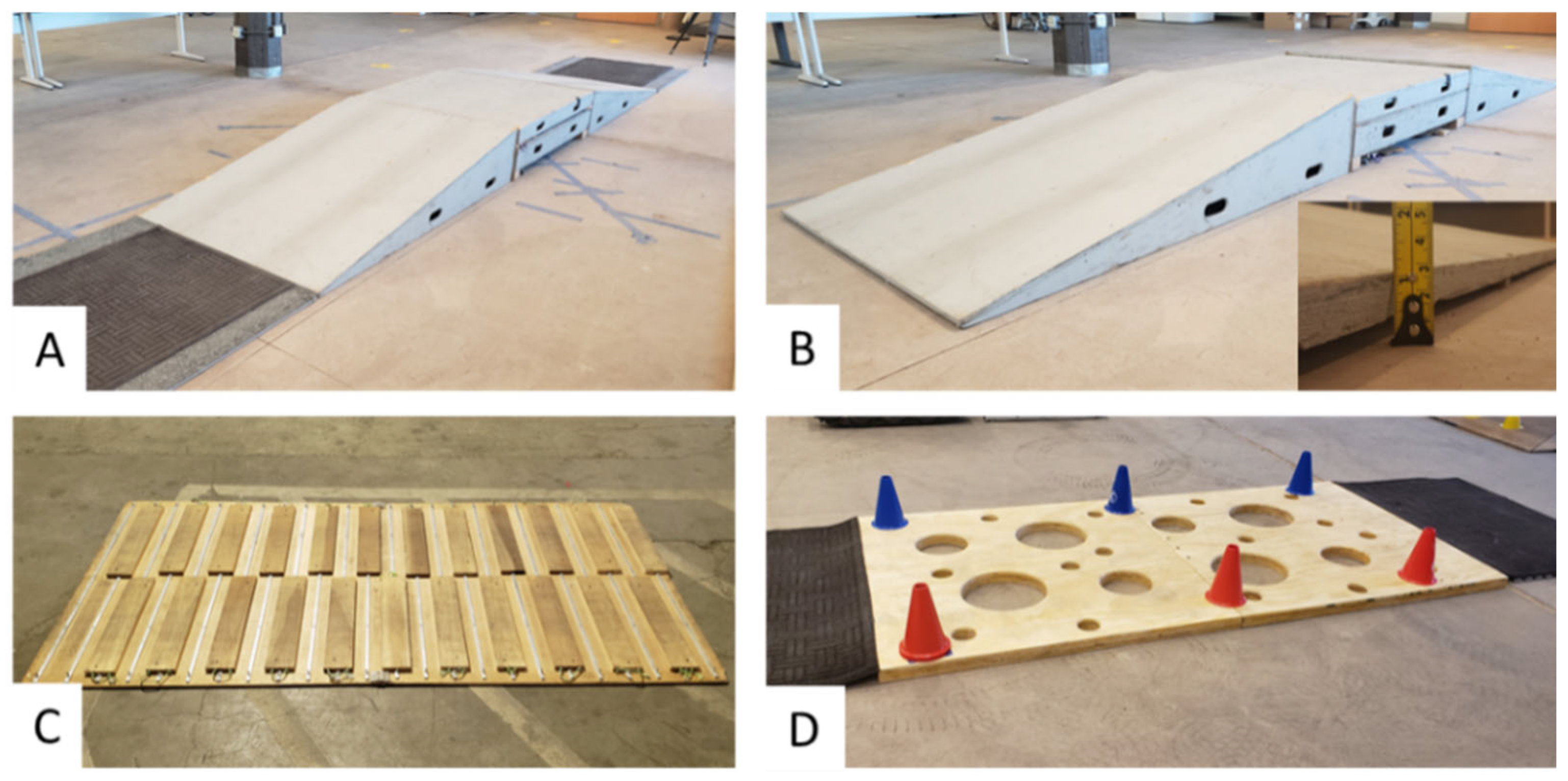
2.3. Surfaces
2.4. Data Analysis
3. Results
4. Discussion
4.1. WBV Differences between Surfaces
4.2. WBV Differences between EPWs
4.3. Limitations
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- U.S. Census Bureau. Americans with Disabilities: 2014. 2018. Available online: https://www.census.gov/content/dam/Census/library/publications/2018/demo/p70-152.pdf (accessed on 29 November 2019).
- World Health Organization. International Classification of Functioning, Disability and Health: ICF; World Health Organization: Ginevra, Switzerland, 2001. [Google Scholar]
- Trefler, E.; Fitzgerald, S.G.; Hobson, D.A.; Bursick, T.; Joseph, R. Outcomes of wheelchair systems intervention with residents of long-term care facilities. Assist. Technol. 2004, 16, 18–27. [Google Scholar] [CrossRef] [PubMed]
- Salminen, A.-L.; Brandt, Å.; Samuelsson, K.; Töytäri, O.; Malmivaara, A. Mobility devices to promote activity and participation: A systematic review. J. Rehabil. Med. 2009, 41, 697–706. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lariviere, O.; Chadefaux, D.; Sauret, C.; Thoreux, P. Vibration Transmission during Manual Wheelchair Propulsion: A Systematic Review. Vibration 2021, 4, 444–483. [Google Scholar] [CrossRef]
- Garcia-Mendez, Y.; Boninger, M.L. Dynamic stiffness and transmissibility of commercially available wheelchair cushions using a laboratory test method. J. Rehabil. Res. Dev. 2012, 49, 7. [Google Scholar] [CrossRef] [PubMed]
- Maeda, S.; Futatsuka, M.; Yonesaki, J.; Ikeda, M. Relationship between questionnaire survey results of vibration complaints of wheelchair users and vibration transmissibility of manual wheelchair. Environ. Health Prev. Med. 2003, 8, 82–89. [Google Scholar] [CrossRef]
- VanSickle, D.P.; Cooper, R.A.; Boninger, M.L.; DiGiovine, C.P. Analysis of vibrations induced during wheelchair propulsion. J. Rehabil. Res. Dev. 2001, 38, 409–421. [Google Scholar]
- ISO. I. 2631-1: Mechanical Vibration and Shock-Evaluation of Human Exposure to Whole-Body Vibration-PART 1: General Requirements; ISO: Geneva, Switzerland, 1997; Volume 27, pp. 193–198. [Google Scholar]
- Duvall, J.; Cooper, R.; Sinagra, E.; Stuckey, D.; Brown, J.; Pearlman, J. Development of surface roughness standards for pathways used by wheelchairs. Transp. Res. Rec. 2013, 2387, 149–156. [Google Scholar] [CrossRef] [Green Version]
- Sonenblum, S.E.; Sprigle, S.; Harris, F.H.; Maurer, C.L. Characterization of power wheelchair use in the home and community. Arch. Phys. Med. Rehabil. 2008, 89, 486–491. [Google Scholar] [CrossRef]
- Wolf, E.; Pearlman, J.; Cooper, R.A.; Fitzgerald, S.G.; Kelleher, A.; Collins, D.M.; Boninger, M.L.; Cooper, R. Vibration exposure of individuals using wheelchairs over sidewalk surfaces. Disabil. Rehabil. 2005, 27, 1443–1449. [Google Scholar] [CrossRef]
- United States Department of Justice. 2010 ADA Standards for Accessible Design; Department of Justice: Washington, DC, USA, 2010.
- Bennett, S.; Lee Kirby, R.; Bennett, S.; Lee Kirby, R.; Macdonald, B. Wheelchair accessibility: Descriptive survey of curb ramps in an urban area. Disabil. Rehabil. Assist. Technol. 2009, 4, 17–23. [Google Scholar] [CrossRef]
- Cooper, R.A.; Wolf, E.; Fitzgerald, S.G.; Boninger, M.L.; Ulerich, R.; Ammer, W.A. Seat and footrest shocks and vibrations in manual wheelchairs with and without suspension. Arch. Phys. Med. Rehabil. 2003, 84, 96–102. [Google Scholar] [CrossRef] [PubMed]
- Hashizume, T.; Kitagawa, H.; Yoneda, I.; Takami, M.; Fujisawa, S.; Sueda, O.; Kamata, M. Study on the wheelchair user’s body vibration and wheelchair driving torque when wheelchair is ascending/descending the boundary curb between pavement and roadway. In Proceedings of the 2008 SICE Annual Conference, Chofu, Japan, 20–22 August 2008; pp. 1273–1276. [Google Scholar]
- Na, J.; Huang, Y.; Pei, Q.; Wu, X.; Gao, G.; Li, G. Active suspension control of full-car systems without function approximation. IEEE/ASME Trans. Mechatron. 2019, 25, 779–791. [Google Scholar] [CrossRef]
- Ghazaly, N.M.; Moaaz, A.O. The future development and analysis of vehicle active suspension system. IOSR J. Mech. Civ. Eng. 2014, 11, 19–25. [Google Scholar] [CrossRef]
- Saghafi, A.; Bagheri Hosseinabadi, M.; Khomarian, N. Control of Electric Wheelchair Suspension System based on Biodynamic Response of Seated Human Body. Int. J. Eng. 2020, 33, 1629–1636. [Google Scholar]
- Su, K.-H.; Chang, T.-H.; Su, S.-F. Design of fuzzy-based magnetic suspension vibrator for electric wheelchair. In Proceedings of the 2015 IEEE 12th International Conference on Networking, Sensing and Control, Taipei, Taiwan, 9–11 April 2015; pp. 586–591. [Google Scholar]
- Candiotti, J.L.; Kamaraj, D.C.; Daveler, B.; Chung, C.-S.; Grindle, G.G.; Cooper, R.; Cooper, R.A. Usability Evaluation of a Novel Robotic Power Wheelchair for Indoor and Outdoor Navigation. Arch. Phys. Med. Rehabil. 2019, 100, 627–637. [Google Scholar] [CrossRef] [PubMed]
- Permobil F5 Brochure. Available online: https://www.permobil.com/en-us/products/power-wheelchairs/permobil-f5-corpus (accessed on 23 December 2021).
- Ding, D.; Cooper, R.A. Electric powered wheelchairs. Control. Syst. IEEE 2005, 25, 22–34. [Google Scholar]
- Prabhu, G.; O’Connor, N.E.; Moran, K. Recognition and repetition counting for local muscular endurance exercises in exercise-based rehabilitation: A comparative study using artificial intelligence models. Sensors 2020, 20, 4791. [Google Scholar] [CrossRef]
- Zhou, L.; Fischer, E.; Tunca, C.; Brahms, C.M.; Ersoy, C.; Granacher, U.; Arnrich, B. How we found our IMU: Guidelines to IMU selection and a comparison of seven IMUs for pervasive healthcare applications. Sensors 2020, 20, 4090. [Google Scholar] [CrossRef]
- DiGiovine, M.M.; Cooper, R.A.; Boninger, M.L.; Lawrence, B.M.; VanSickle, D.P.; Rentschler, A.J. User assessment of manual wheelchair ride comfort and ergonomics. Arch. Phys. Med. Rehabil. 2000, 81, 490–494. [Google Scholar] [CrossRef]
- Fitzpatrick, K.; Brewer, M.A.; Turner, S. Another look at pedestrian walking speed. Transp. Res. Rec. 2006, 1982, 21–29. [Google Scholar] [CrossRef]
- ANSI/RESNA. American national standard for wheechairs—Volume 1: Requirements and test methods for wheelchairs (including scooters). In Virginia; Rehabilitation Engineering and Assistive Technology Society of North America: Washington, DC, USA, 1998. [Google Scholar]
- Kirby, R.L.; Miller, W.C.; Routhier, F.; Demers, L.; Mihailidis, A.; Polgar, J.M.; Rushton, P.W.; Titus, L.; Smith, C.; McAllister, M. Effectiveness of a wheelchair skills training program for powered wheelchair users: A randomized controlled trial. Arch. Phys. Med. Rehabil. 2015, 96, 2017–2026.e3. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kirby, R.L.; Swuste, J.; Dupuis, D.J.; MacLeod, D.A.; Monroe, R. The Wheelchair Skills Test: A pilot study of a new outcome measure. Arch. Phys. Med. Rehabil. 2002, 83, 10–18. [Google Scholar] [CrossRef] [PubMed]
- Borisoff, J.F.; Ripat, J.; Chan, F. Seasonal patterns of community participation and mobility of wheelchair users over an entire year. Arch. Phys. Med. Rehabil. 2018, 99, 1553–1560. [Google Scholar] [CrossRef] [PubMed]
- Dicianno, B.E.; Tovey, E. Power mobility device provision: Understanding Medicare guidelines and advocating for clients. Arch. Phys. Med. Rehabil. 2007, 88, 807–816. [Google Scholar] [CrossRef] [PubMed]
- Sivakanthan, S.; Candiotti, J.L.; Sundaram, S.A.; Battles, C.; Daveler, B.J.; Chung, C.-S.; Grindle, G.G.; Cooper, R.; Dicianno, B.E.; Cooper, R.A. Usability evaluation of attitude control for a robotic wheelchair for tip mitigation in outdoor environments. Med. Eng. Phys. 2020, 82, 86–96. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, L.; Hu, Y.; Yang, F. Vibration characteristics analysis of convalescent-wheelchair robots equipped with dynamic absorbers. Shock Vib. 2018, 2018, 5393051. [Google Scholar] [CrossRef]
- Banks, M.B.; Alderson, M.; Coria, I.S. Vibration Exposure in Wheelchairs: The Effect of Inflation Pressure and Tire Type. Assist. Technol. 2021, 33, 171. [Google Scholar]
- Velho, R. Transport accessibility for wheelchair users: A qualitative analysis of inclusion and health. Int. J. Transp. Sci. Technol. 2019, 8, 103–115. [Google Scholar] [CrossRef]
- Cooper, R.A.; Thorman, T.; Cooper, R.; Dvorznak, M.J.; Fitzgerald, S.G.; Ammer, W.; Song-Feng, G.; Boninger, M.L. Driving characteristics of electric-powered wheelchair users: How far, fast, and often do people drive? Arch. Phys. Med. Rehabil. 2002, 83, 250–255. [Google Scholar] [CrossRef] [Green Version]
- Kwasniak, A.; Cuadrado, J.; Kuzel, M.; Sinocruz, J. Evaluating public awareness of trip hazards on outdoor walkways. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Boston, MA, USA, 22–26 October 2012; pp. 639–642. [Google Scholar]
- Múčka, P. Road roughness limit values based on measured vehicle vibration. J. Infrastruct. Syst. 2017, 23, 04016029. [Google Scholar] [CrossRef]
- Athanasopoulos, G.; Pelekis, P. Ground vibrations from sheetpile driving in urban environment: Measurements, analysis and effects on buildings and occupants. Soil Dyn. Earthq. Eng. 2000, 19, 371–387. [Google Scholar] [CrossRef]
- Salatin, B. Electrical Powered Wheelchair Driving Outdoors: The Identification of Driving Obstacles & Strategies and the Development of an Advanced Controller. Ph.D. Thesis, School of Health and Rehabilitation Sciences, University of Pittsburgh, Pittsburgh, PA, USA, 2011. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
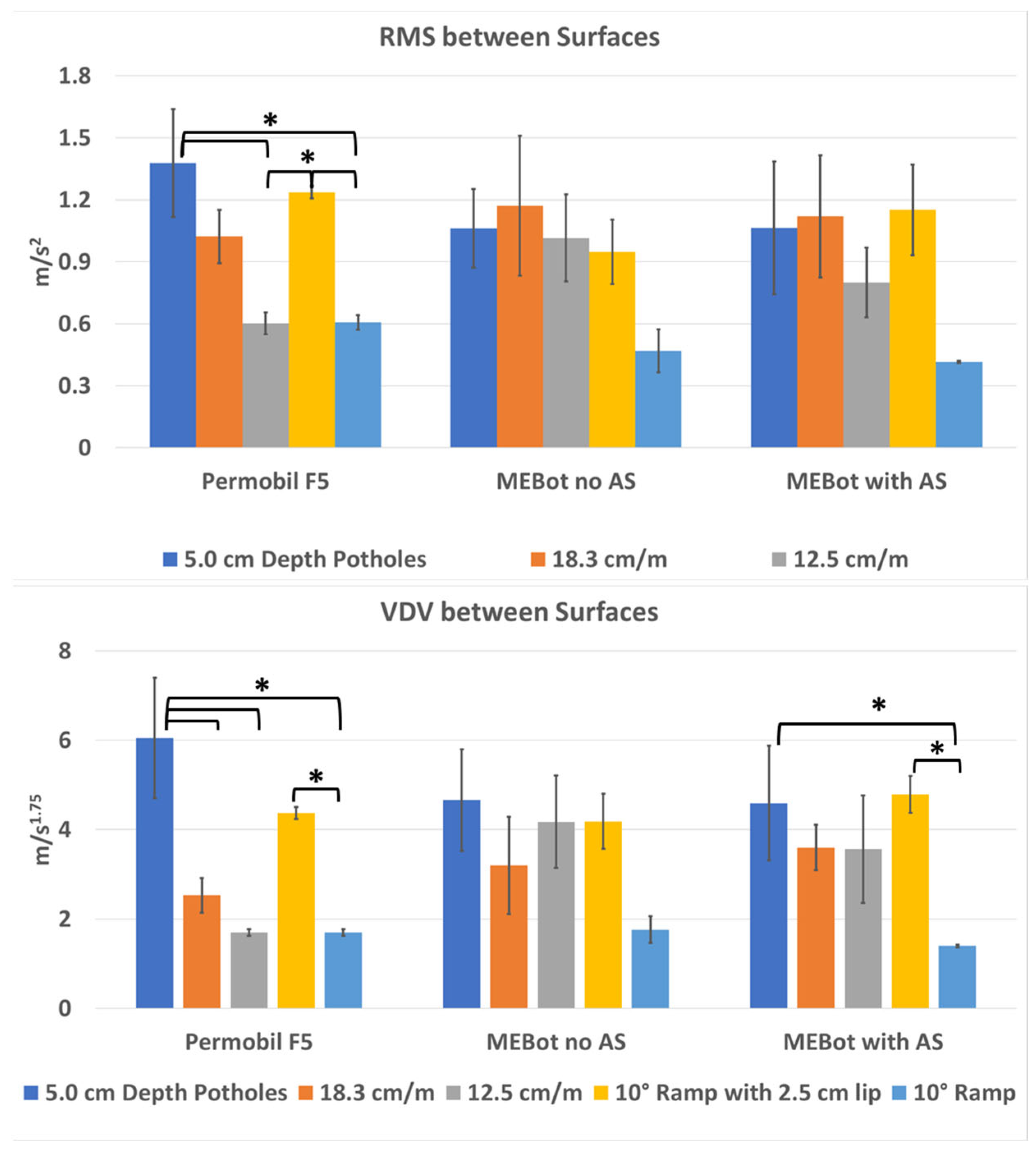
| Surfaces | Devices | RMS (m/s2) | VDV (m/s1.75) |
|---|---|---|---|
| Potholes 5.0 cm in depth | Permobil F5 | 1.4 ± 0.3 | 6.1 ± 1.3 |
| MEBot no AS | 1.1 ± 0.2 | 4.7 ± 1.1 | |
| MEBot with AS | 1.1 ± 0.3 | 4.6 ± 1.3 | |
| 18.3 cm/m Surface Roughness | Permobil F5 | 1.0 ± 0.1 | 2.5 ± 0.4 |
| MEBot no AS | 1.2 ± 0.3 | 3.2 ± 1.0 | |
| MEBot with AS | 1.1 ± 0.3 | 3.6 ± 0.5 | |
| 12.5 cm/m Surface Roughness | Permobil F5 | 0.6 ± 0.1 | 1.7 ± 0.1 |
| MEBot no AS | 1.0 ± 0.2 | 4.2 ± 1.0 | |
| MEBot with AS | 0.8 ± 0.2 | 3.6 ± 1.2 | |
| 10° Ramp with 2.5 cm threshold | Permobil F5 | 1.2 ± 0.0 | 4.4 ± 0.1 |
| MEBot no AS | 0.9 ± 0.2 | 4.2 ± 0.6 | |
| MEBot with AS | 1.2 ± 0.2 | 4.8 ± 0.1 | |
| 10° Ramp No Threshold | Permobil F5 | 0.6 ± 0.0 | 1.7 ± 0.1 |
| MEBot no AS | 0.5 ± 0.1 | 1.8 ± 0.3 | |
| MEBot with AS | 0.4 ± 0.0 | 1.4 ± 0.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Candiotti, J.L.; Neti, A.; Sivakanthan, S.; Cooper, R.A. Analysis of Whole-Body Vibration Using Electric Powered Wheelchairs on Surface Transitions. Vibration 2022, 5, 98-109. https://doi.org/10.3390/vibration5010006
Candiotti JL, Neti A, Sivakanthan S, Cooper RA. Analysis of Whole-Body Vibration Using Electric Powered Wheelchairs on Surface Transitions. Vibration. 2022; 5(1):98-109. https://doi.org/10.3390/vibration5010006
Chicago/Turabian StyleCandiotti, Jorge L., Ahlad Neti, Sivashankar Sivakanthan, and Rory A. Cooper. 2022. "Analysis of Whole-Body Vibration Using Electric Powered Wheelchairs on Surface Transitions" Vibration 5, no. 1: 98-109. https://doi.org/10.3390/vibration5010006
APA StyleCandiotti, J. L., Neti, A., Sivakanthan, S., & Cooper, R. A. (2022). Analysis of Whole-Body Vibration Using Electric Powered Wheelchairs on Surface Transitions. Vibration, 5(1), 98-109. https://doi.org/10.3390/vibration5010006