

Influence of Interference between Vertical and Roll Vibrations on the Dynamic Behaviour of the Railway Bogie

Abstract
:1. Introduction
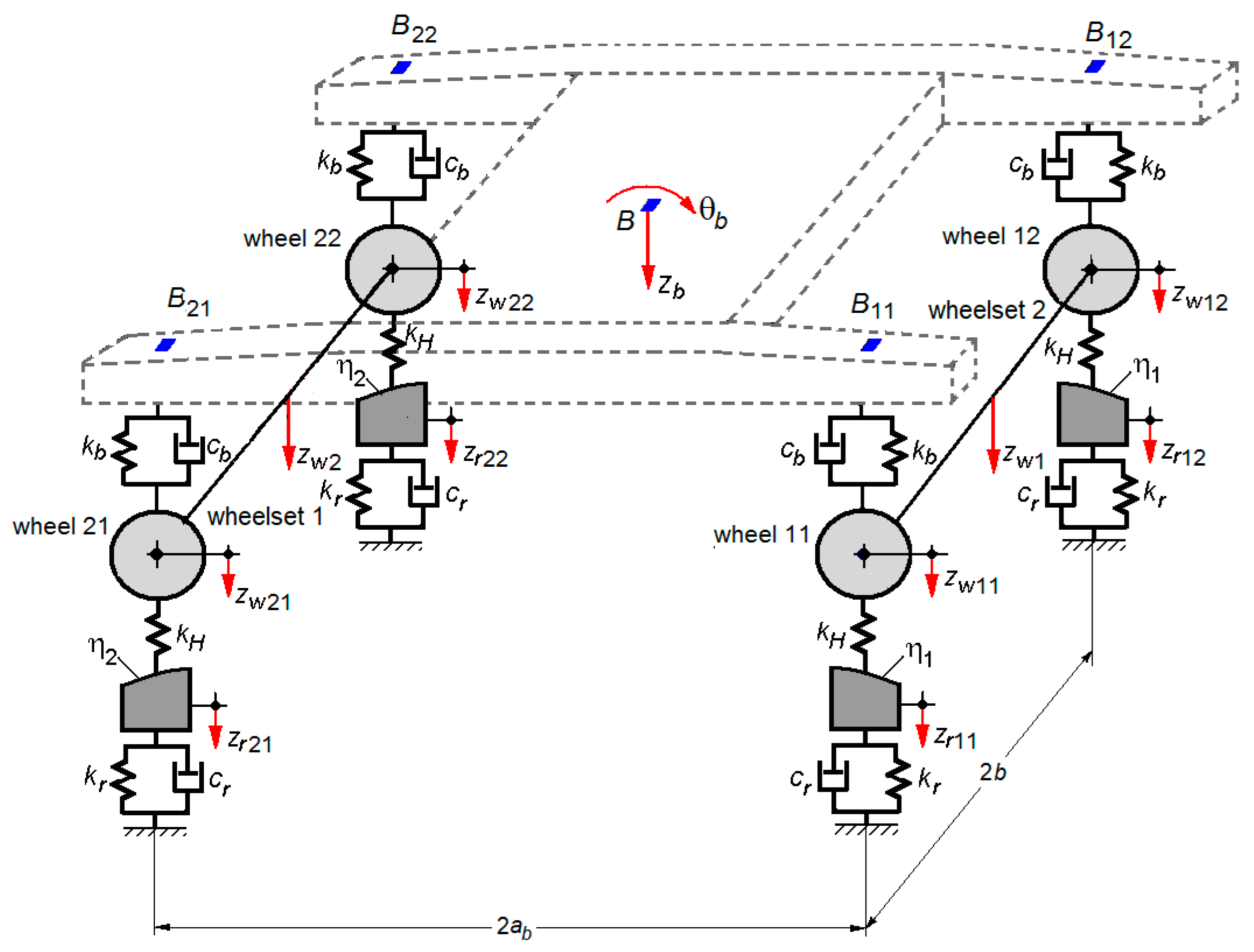
2. The Bogie—Track System Model
2.1. The Model of the Bogie with Symmetrical Damping of Suspension—Track
- -
- equation of the bogie bounce,
- -
- equation of the bogie pitch,
- -
- equations of the wheelsets bounce,
- -
- equations of vertical rail displacements,
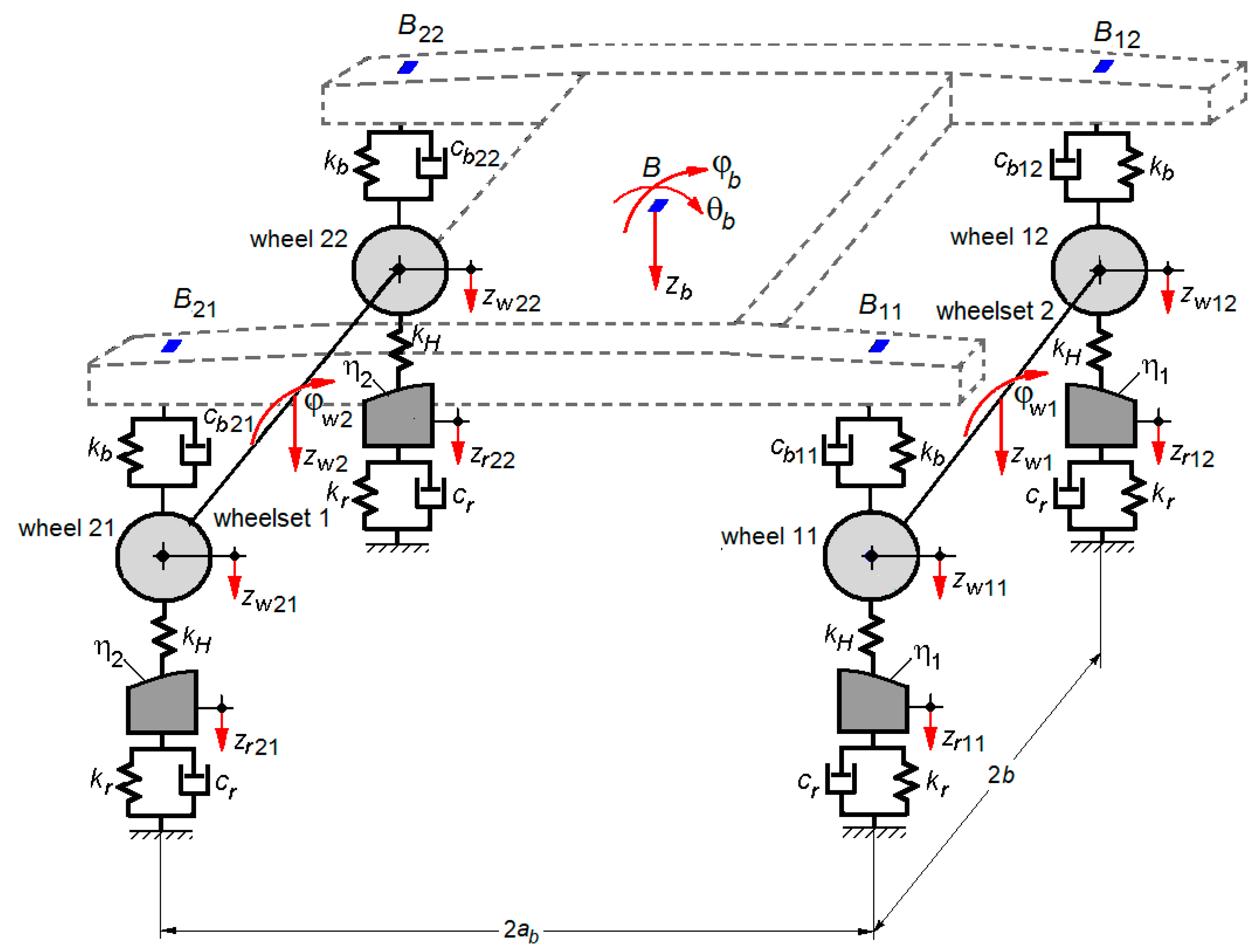
2.2. The Model of the Bogie with Asymmetrical Damping of Suspension—Track
3. The Analysis of the Dynamic Behaviour of the Bogie
3.1. The Parameters of the Bogie—Track System Numerical Model
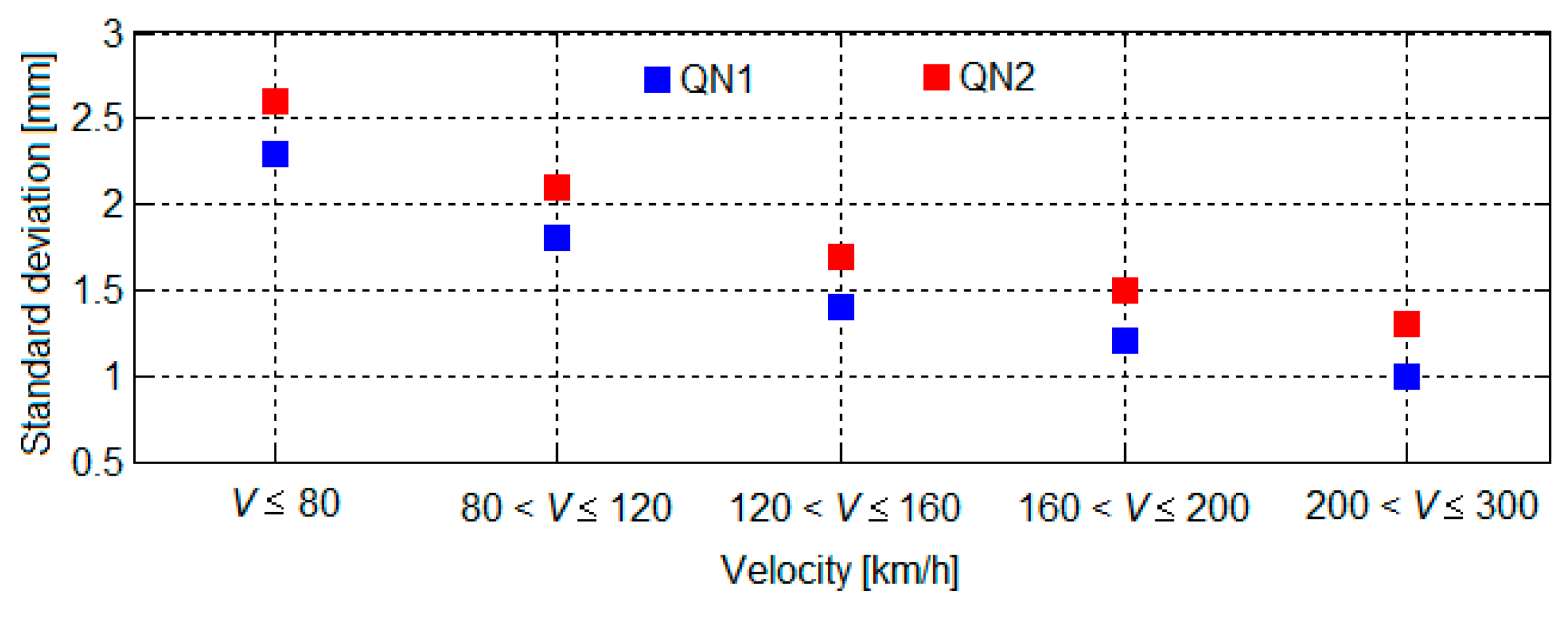
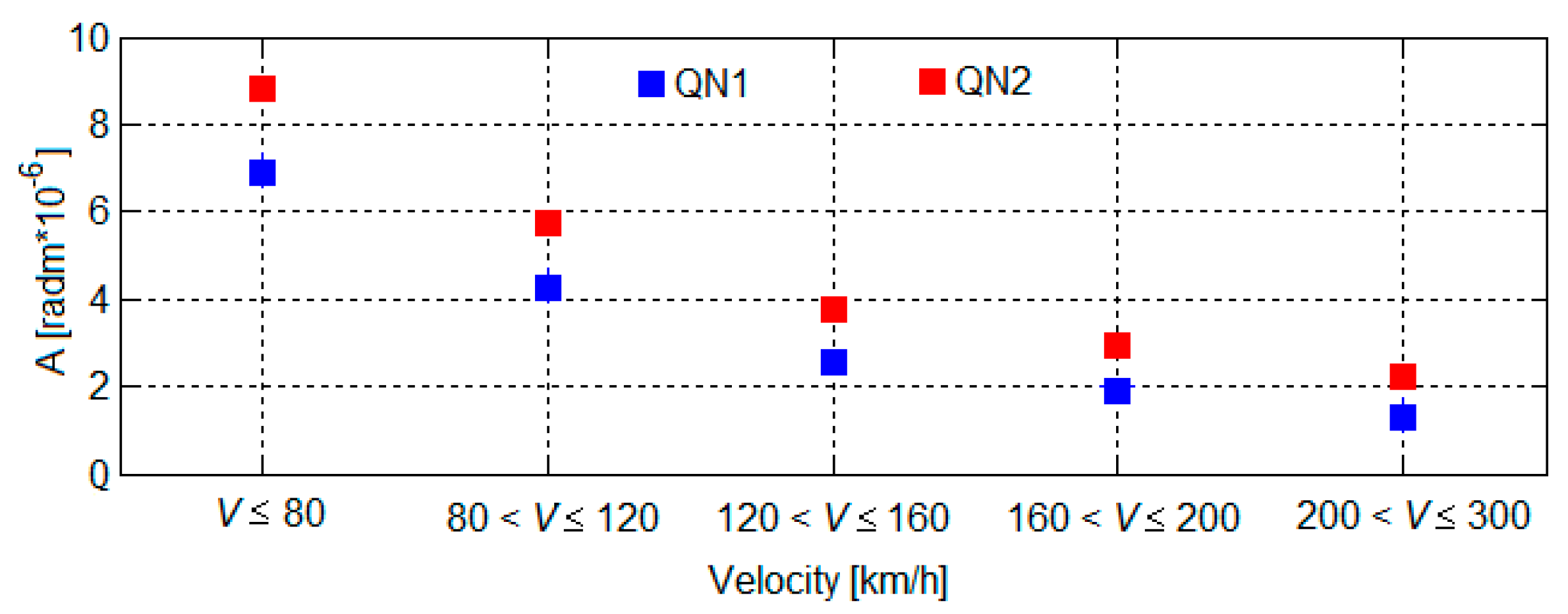
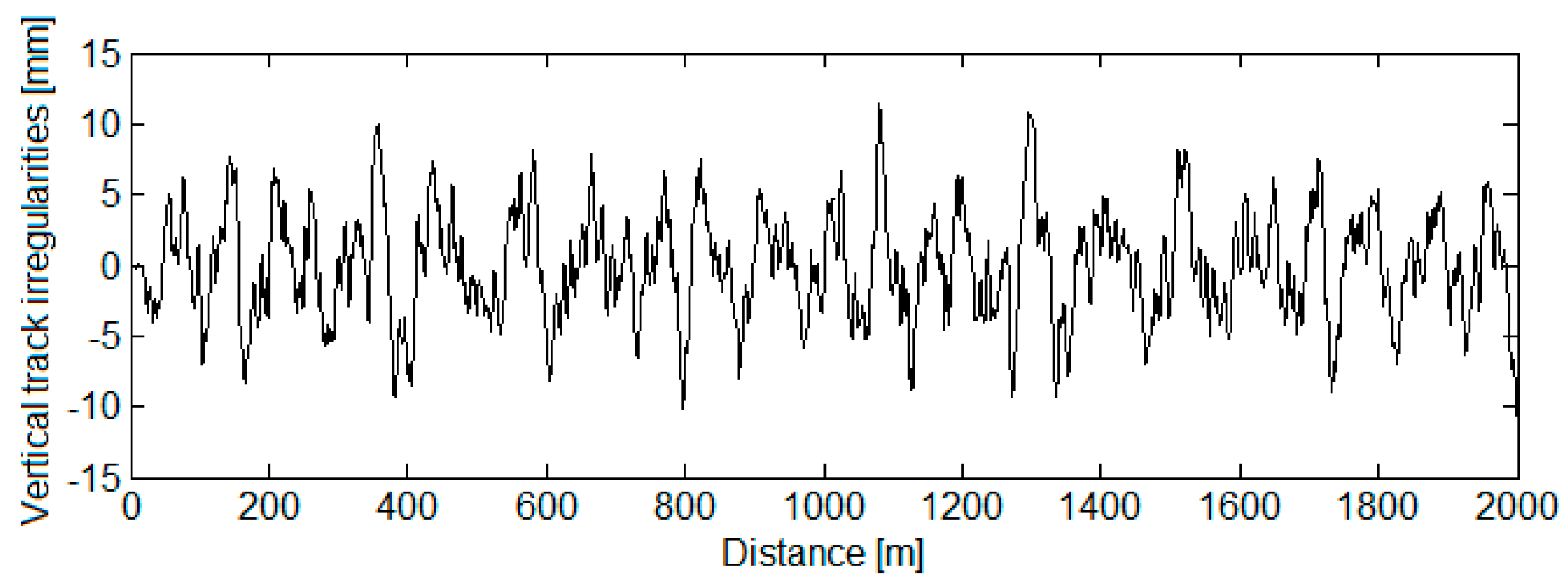
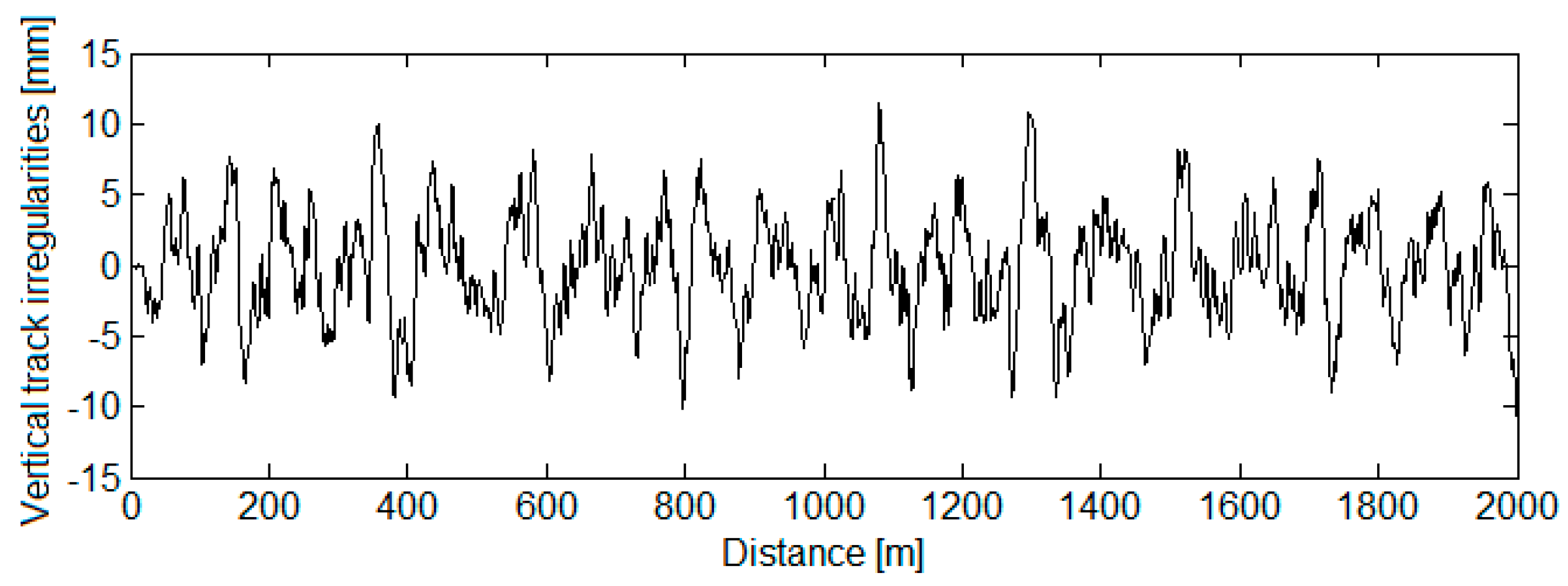
3.2. The Analytical Description of the Vertical Track Irregularities
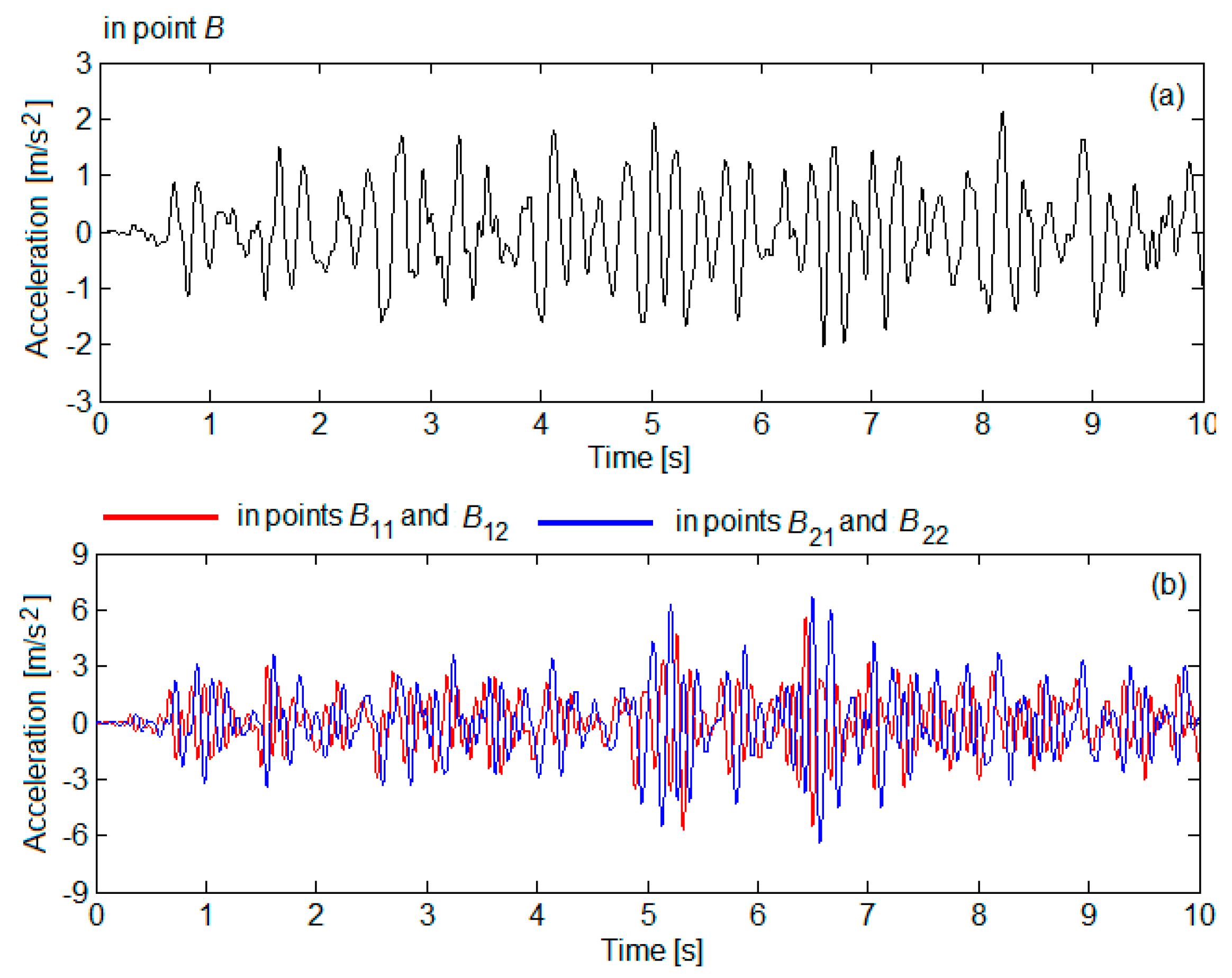
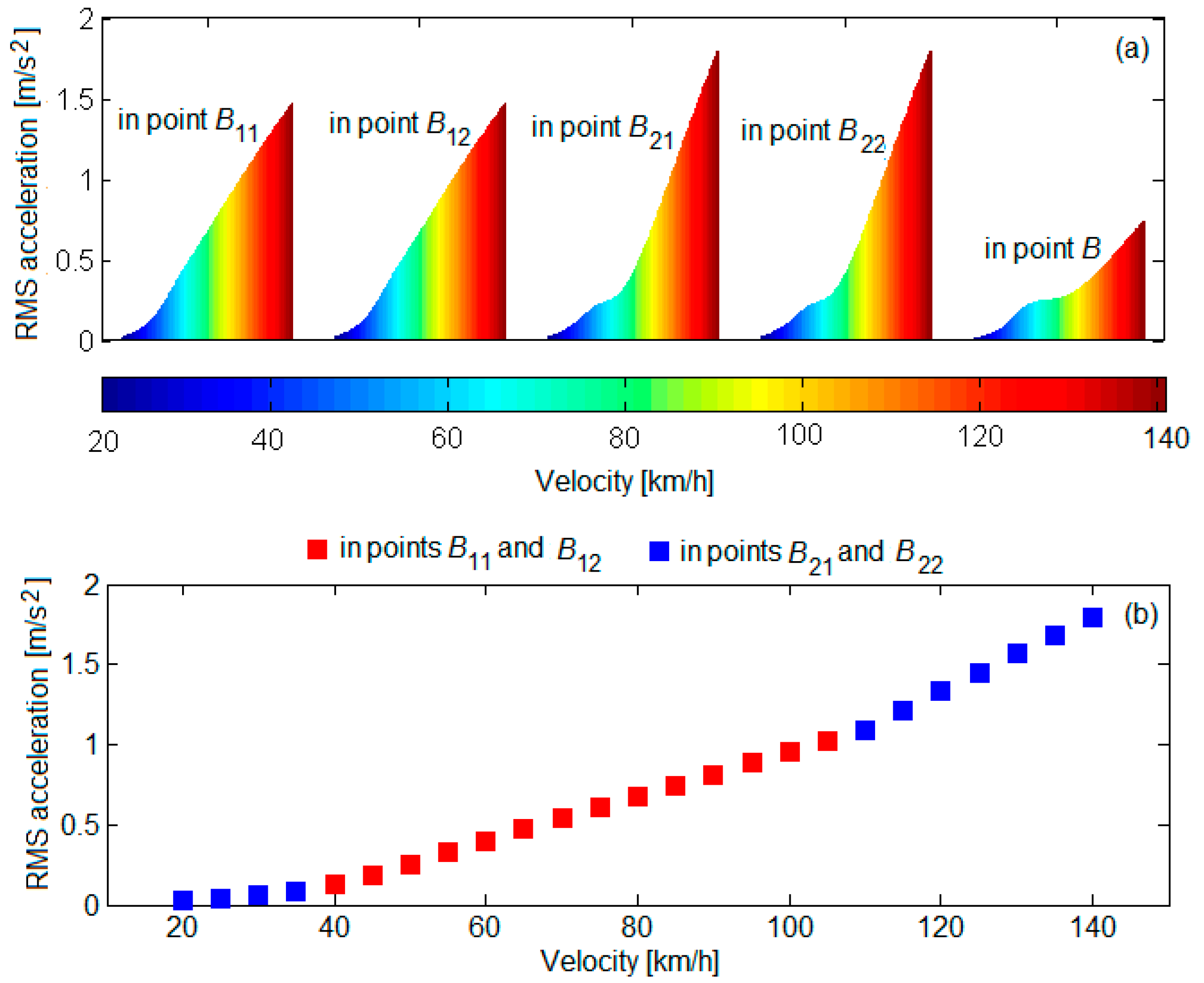
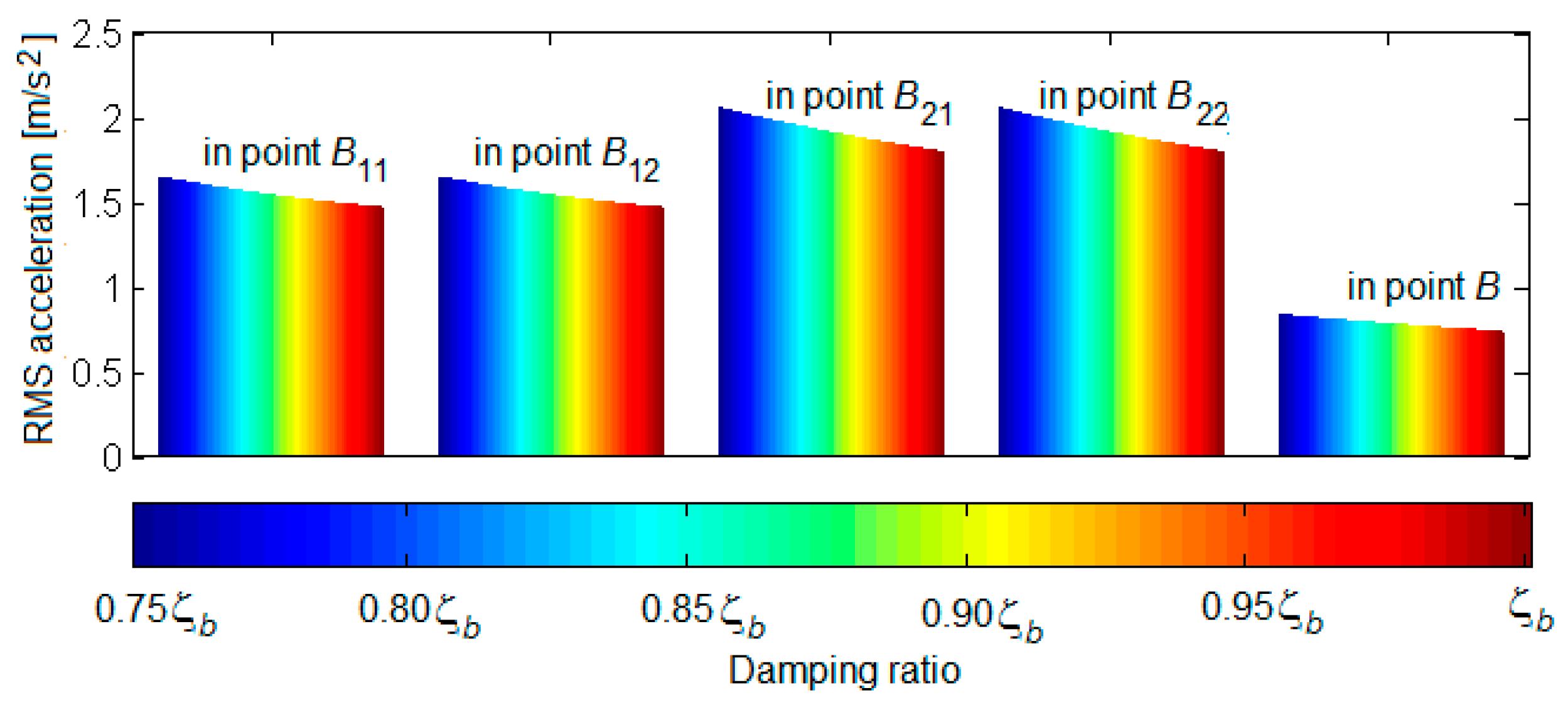
3.3. The Results of the Numerical Simulations and Discussions
4. Conclusions
- -
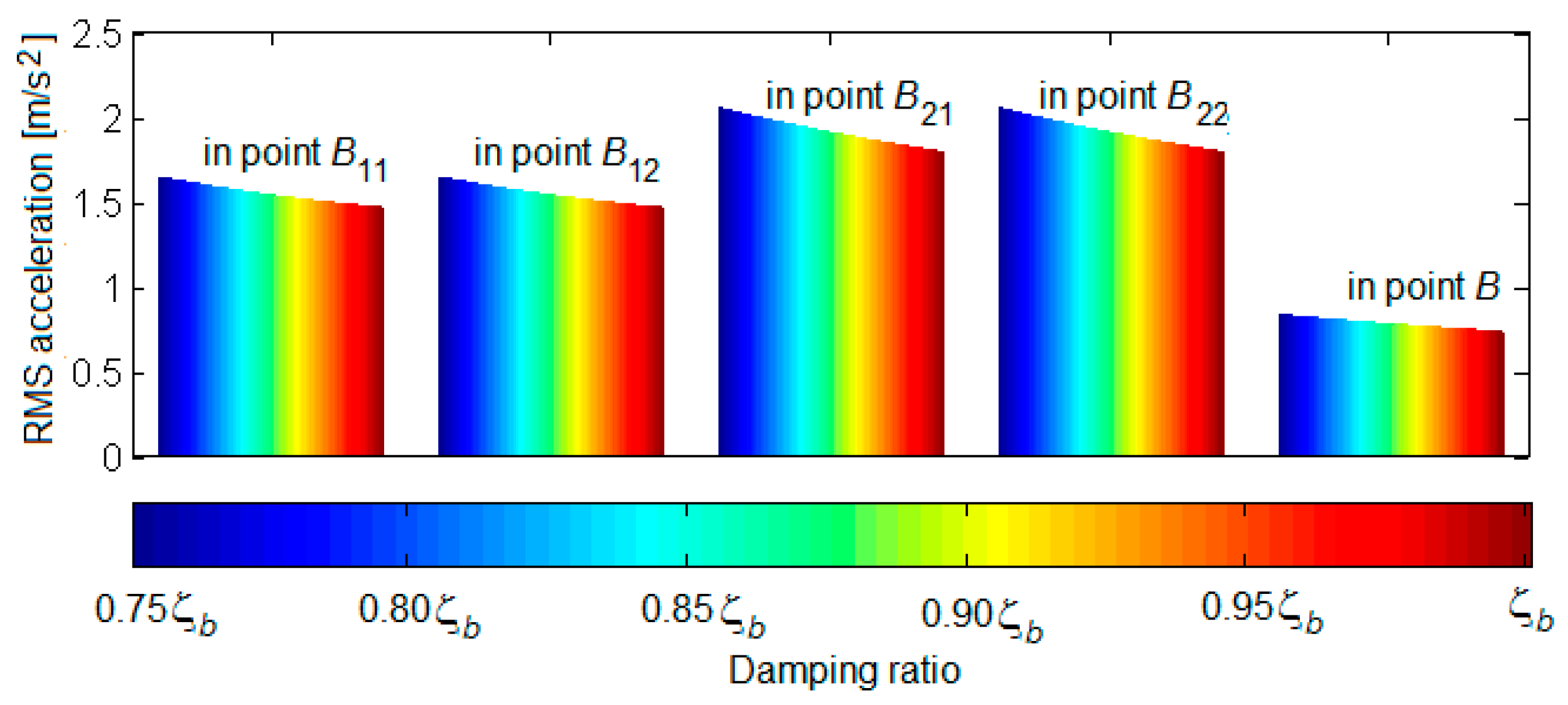
- The regime of vibrations of the bogie is symmetrical in the reference points located against the suspensions corresponding to the wheels of the same wheelsets;
- -
- The vibration level of the bogie increases uniformly at all reference points;
- -
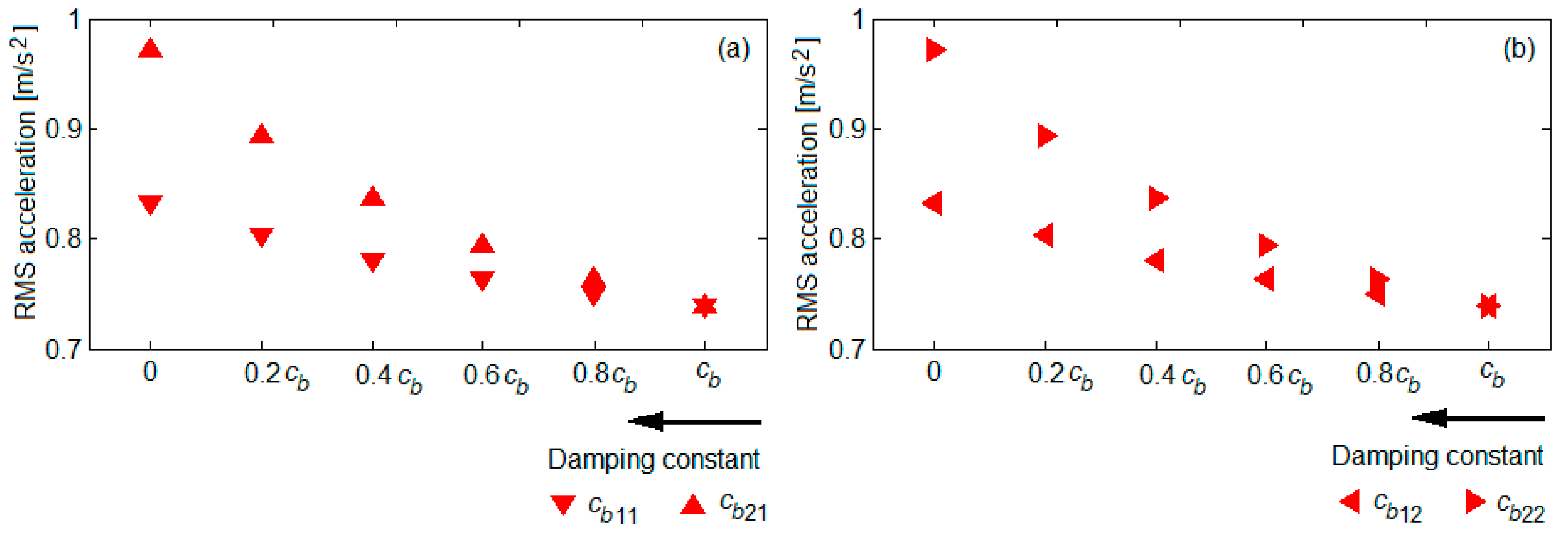
- In contrast, the results of the analysis considering the asymmetry of the suspension damping show the following:
- -
- The regime of vibrations of the bogie is asymmetrical in the reference points located against the suspensions corresponding to the wheels of the same wheelset; the asymmetry is all the more pronounced as the degree of reduction in the damping constant increases;
- -
- The increase in the level of vibrations is more or less significant, depending on the position of the suspension for which the damping constant is reduced and on the reduction degree of the damping constant; the highest rise in the level of vibrations is recorded in the bogie reference point against the suspension for which the damping constant is decreased and in the diagonally opposite reference point.
- -
- It is based on the analysis of the bogie dynamic behaviour, expressed in the form of RMS acceleration, and the RMS acceleration is a parameter representative in statistical terms, which can be easily measured and then compared to a reference value;
- -
- The failure of any of the four dampers of the primary suspension can be detected, based on the RMS accelerations measured in only two reference points of the bogie frame.
Author Contributions
Funding
Conflicts of Interest
References
- Jing, L.; Wang, K.; Zhai, W. Impact vibration behavior of railway vehicles: A state-of-the-art overview. Acta Mech. Sin. 2021, 37, 1193–1221. [Google Scholar] [CrossRef]
- Kouroussisa, G.; Connolly, D.P.; Verlinden, O. Railway-induced ground vibrations—A review of vehicle effects. Int. J. Rail Transp. 2014, 2, 69–110. [Google Scholar] [CrossRef]
- Iwnicki, S. Handbook of Railway Vehicle Dynamics; Taylor&Francis Group: Milton Park, UK, 2006. [Google Scholar]
- Melnik, R.; Koziak, S. Rail vehicle suspension condition monitoring—Approach and implementation. Int. J. Vibroeng. 2017, 19, 487–501. [Google Scholar] [CrossRef]
- Melnik, R.; Sowiński, B. The selection procedure of diagnostic indicator of suspension fault modes for the rail vehicles monitoring system. In Proceedings of the 7th European Workshop on Structural Health Monitoring, Nantes, France, 8–11 July 2014; pp. 126–132. [Google Scholar]
- Dumitriu, M. Effect of the asymmetry of suspension damping on the ride comfort of railway vehicles. Aust. J. Mech. Eng. 2020. [Google Scholar] [CrossRef]
- Dumitriu, M. Study on the effect of damping asymmetry of the vertical suspension on the railway bogie vibrations. Symmetry 2022, 14, 327. [Google Scholar] [CrossRef]
- Dumitriu, M. Fault detection of damper in railway vehicle suspension based on the cross-correlation analysis of bogie accelerations. Mech. Ind. 2019, 20, 102. [Google Scholar] [CrossRef]
- Mei, T.X.; Ding, X.J. New condition monitoring techniques for vehicle suspensions. In Proceedings of the 2008 4th IET International Conference on Railway Condition Monitoring, Derby, UK, 18–20 June 2008; pp. 1–6. [Google Scholar]
- Li, P.; Goodall, R.; Weston, P.; Ling, C.S.; Goodman, C. Estimation of railway vehicle suspension parameters for condition monitoring. Control. Eng. Pract. 2007, 15, 43–55. [Google Scholar] [CrossRef]
- Ngigi, R.W.; Pîslaru, C.; Ball, A.; Gu, F. Modern techniques for condition monitoring of railway vehicle dynamics. J. Phys. Conf. Ser. 2012, 364, 012016. [Google Scholar] [CrossRef]
- Alfi, S.; Bionda, S.; Bruni, S.; Gasparetto, L. Condition monitoring of suspension components in railway bogies. In Proceedings of the 5th IET Conference on Railway Condition Monitoring and Non-Destructive Testing (RCM 2011), Derby Conference Centre, UK, 29–30 November 2011; pp. 1–6. [Google Scholar]
- Bruni, S.; Goodall, R.; Mei, T.X.; Tsunashima, H. Control and monitoring for railway vehicle dynamics. Veh. Syst. Dyn. 2007, 45, 743–779. [Google Scholar] [CrossRef]
- Goodall, R.M.; Roberts, C. Concept and techniques for railway condition monitoring. In Proceedings of the 2006 IET International Conference On Railway Condition Monitoring, Birmingham, UK, 29–30 November 2006; pp. 90–95. [Google Scholar]
- Dumitriu, M. Condition monitoring of the dampers in the railway vehicle suspension based on the vibrations response analysis of the bogie. Sensors 2022, 22, 3290. [Google Scholar] [CrossRef] [PubMed]
- Dumitriu, M.; Leu, M. Study regarding the dynamic loads upon the track at failure of the dampers in the primary suspension of the railway vehicle. In Proceedings of the IOP Conference Series: Materials Science and Engineering, 2018, ModTech International Conference—Modern Technologies in Industrial Engineering, Constanţa, Romania, 13–16 June 2018; Volume 400, p. 042020. [Google Scholar]
- Dumitriu, M.; Gheţi, M.A. Evaluation of the vertical vibrations behaviour of the bogie at failure of the dampers in the primary suspension of the railway vehicle. In Proceedings of the 22nd International Conference on Innovative Manufacturing Engineering and Energy—IManE&E 2018, Chisinau, Republic of Moldova, 31 May–2 June 2018; Volume 178, p. 06001. [Google Scholar]
- Dumitriu, M.; Gheţi, M.A. Numerical study on the influence of primary suspension damping upon the dynamic behaviour of railway vehicles. In Proceedings of the IOP Conference Series: Materials Science and Engineering, the 8th International Conference on Advanced Concepts in Mechanical Engineering—ACME 2018, Iasi, Romania, 13–16 June 2018; Volume 444, p. 042001. [Google Scholar]
- Fernandes, J.C.M.; Gonçalves, P.J.P.; Silveira, M. Interaction between asymmetrical damping and geometrical nonlinearity in vehicle suspension systems improves comfort. Nonlinear Dyn. 2020, 99, 1561–1576. [Google Scholar] [CrossRef]
- Dumitriu, M.; Stănică, D.I. Influence of the primary suspension damping on the ride comfort in the railway vehicles. Mater. Sci. Forum 2019, 957, 53–62. [Google Scholar] [CrossRef]
- Dumitriu, M.; Gheţi, M.A. Influence of the interference of bounce and pitch vibrations upon the dynamic behaviour in the bogie of a railway vehicle. In Proceedings of the IOP Conference Series: Materials Science and Engineering, 2018, ModTech International Conference—Modern Technologies in Industrial Engineering, Constanţa, Romania, 13–16 June 2018; Volume 400, p. 042020. [Google Scholar]
- C 116. Interaction between Vehicles and Track, RP 1, Power Spectral Density of Track Irregularities, Part 1: Definitions, Conventions and Available Data; UIC: Utrecht, The Netherlands, 1971. [Google Scholar]
- UIC 518. Testing and Approval of Railway Vehicles from the Point of View of Their Dynamic Behaviour–Safety–Track Fatigue–Running Behaviour, 4th ed.; International Union of Railways: Paris, France, 2009. [Google Scholar]
- Dumitriu, M. Method to synthesize the track vertical irregularities. Sci. Bull. Petru Maior Univ. Targu Mures 2014, 11, 17–24. [Google Scholar]
- Dumitriu, M.; Răcănel, I.R. Experimental verification of method to synthesize the track vertical irregularities. Rom. J. Transp. Infrastruct. 2018, 7, 40–60. [Google Scholar] [CrossRef]
- Dumitriu, M.; Cruceanu, I.C. Experimental analysis of vertical vibrations of a railway bogie. Commun. Sci. Lett. Univ. Zilina. 2021, 23, 299–307. [Google Scholar] [CrossRef]
- Dumitriu, M.; Cruceanu, I.C.; Fologea, D. Experimental study of the bogie vertical vibration—Correlation between bogie frame accelerations and wheelsets accelerations. UPB Sci. Bull. Ser. D Mech. Eng. 2021, 83, 83–94. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bogie frame mass | mb = 2700 kg |
| Wheelset mass | mw = 1400 kg |
| Track mass | mr = 175 kg |
| Bogie wheelbase | 2ab = 2.5 m |
| Lateral base of the suspension | 2b = 2 m |
| Semi-distance between the wheel-rail contact points | 2e = 1.5 m |
| Bogie pitch inertia moment | Jbθ = 1.728·103 kg·m2 |
| Bogie roll inertia moment | Jbφ = 1.323·103 kg·m2 |
| Elastic constant of the primary suspension per wheel | kb = 0.616 MN/m |
| Damping constant of the primary suspension per wheel—Reference value | cb = 9.05 kNs/m |
| Elastic constant of the track | kr = 70 MN/m |
| Damping constant of the track | cr = 60 kNs/m |
| Stiffness of the wheel-rail contact | kH = 1500 MN/m |
| Case I | Case II | ||||||||||||
| cb | 0.8cb | 0.6cb | 0.4cb | 0.2cb | 0 | cb | 0.8cb | 0.6cb | 0.4cb | 0.2cb | 0 | ||
| cb11 | cb11 | ||||||||||||
| cb12 | cb12 | ||||||||||||
| cb21 | cb21 | ||||||||||||
| cb22 | cb22 | ||||||||||||
| Case III | Case IV | ||||||||||||
| cb | 0.8cb | 0.6cb | 0.4cb | 0.2cb | 0 | cb | 0.8cb | 0.6cb | 0.4cb | 0.2cb | 0 | ||
| cb11 | cb11 | ||||||||||||
| cb12 | cb12 | ||||||||||||
| cb21 | cb21 | ||||||||||||
| cb22 | cb22 | ||||||||||||
| cbjk, for j = 1, 2 and k = 1, 2 | cb | 0.8cb | 0.6cb | 0.4cb | 0.2cb | 0 |
| ζb | ζb | 0.95ζb | 0.90ζb | 0.85ζb | 0.80ζb | 0.75ζb |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dumitriu, M.; Apostol, I.I. Influence of Interference between Vertical and Roll Vibrations on the Dynamic Behaviour of the Railway Bogie. Vibration 2022, 5, 659-675. https://doi.org/10.3390/vibration5040039
Dumitriu M, Apostol II. Influence of Interference between Vertical and Roll Vibrations on the Dynamic Behaviour of the Railway Bogie. Vibration. 2022; 5(4):659-675. https://doi.org/10.3390/vibration5040039
Chicago/Turabian StyleDumitriu, Mădălina, and Ioana Izabela Apostol. 2022. "Influence of Interference between Vertical and Roll Vibrations on the Dynamic Behaviour of the Railway Bogie" Vibration 5, no. 4: 659-675. https://doi.org/10.3390/vibration5040039
APA StyleDumitriu, M., & Apostol, I. I. (2022). Influence of Interference between Vertical and Roll Vibrations on the Dynamic Behaviour of the Railway Bogie. Vibration, 5(4), 659-675. https://doi.org/10.3390/vibration5040039