

Influence of the Suspension Model in the Simulation of the Vertical Vibration Behavior of the Railway Vehicle Car Body

Abstract
1. Introduction
2. Railway Vehicle Model
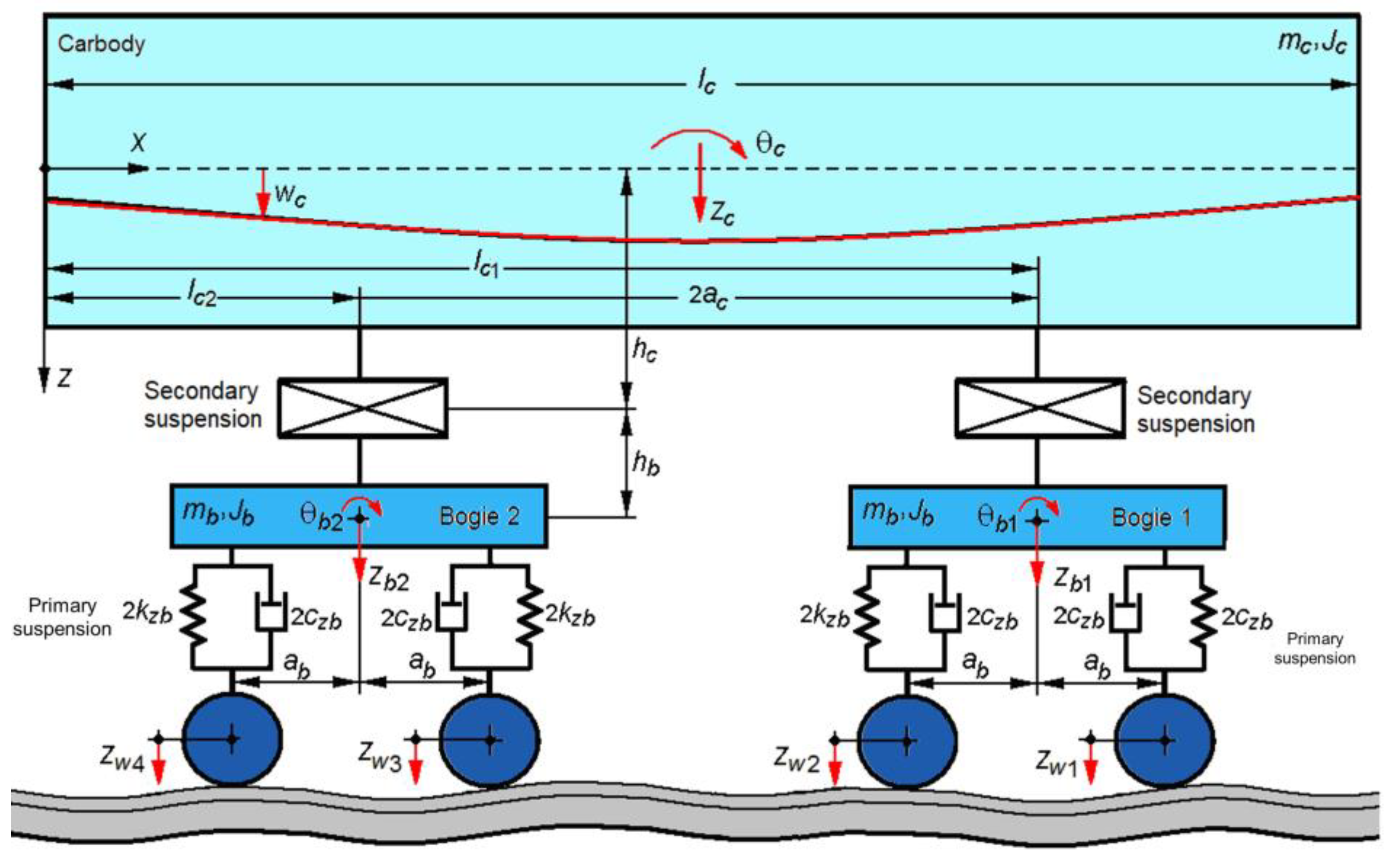
2.1. Description of the Vehicle Model
2.2. The Equations of Motion
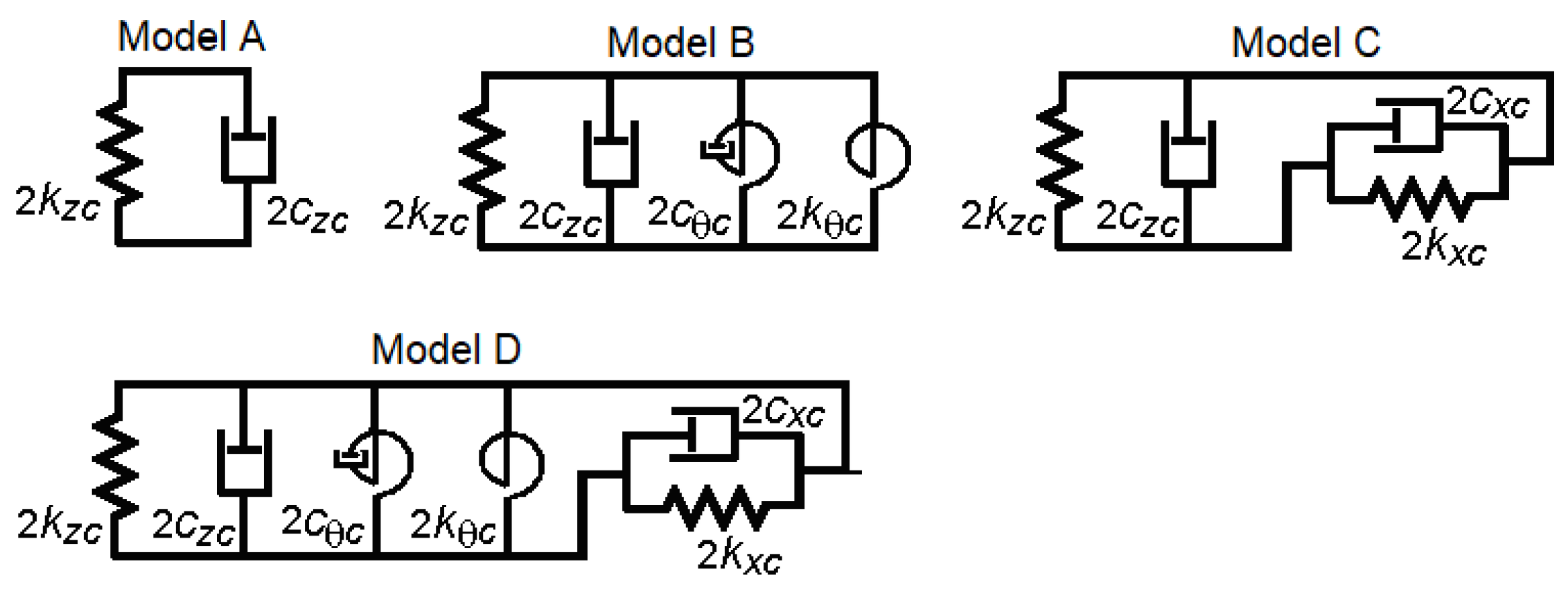
2.2.1. The Equations of Motion for Model A of the Secondary Suspension
2.2.2. The Equations of Motion for Model B of the Secondary Suspension
2.2.3. The Equations of Motion for Model C of the Secondary Suspension
2.2.4. The Equations of Motion for Model D of the Secondary Suspension
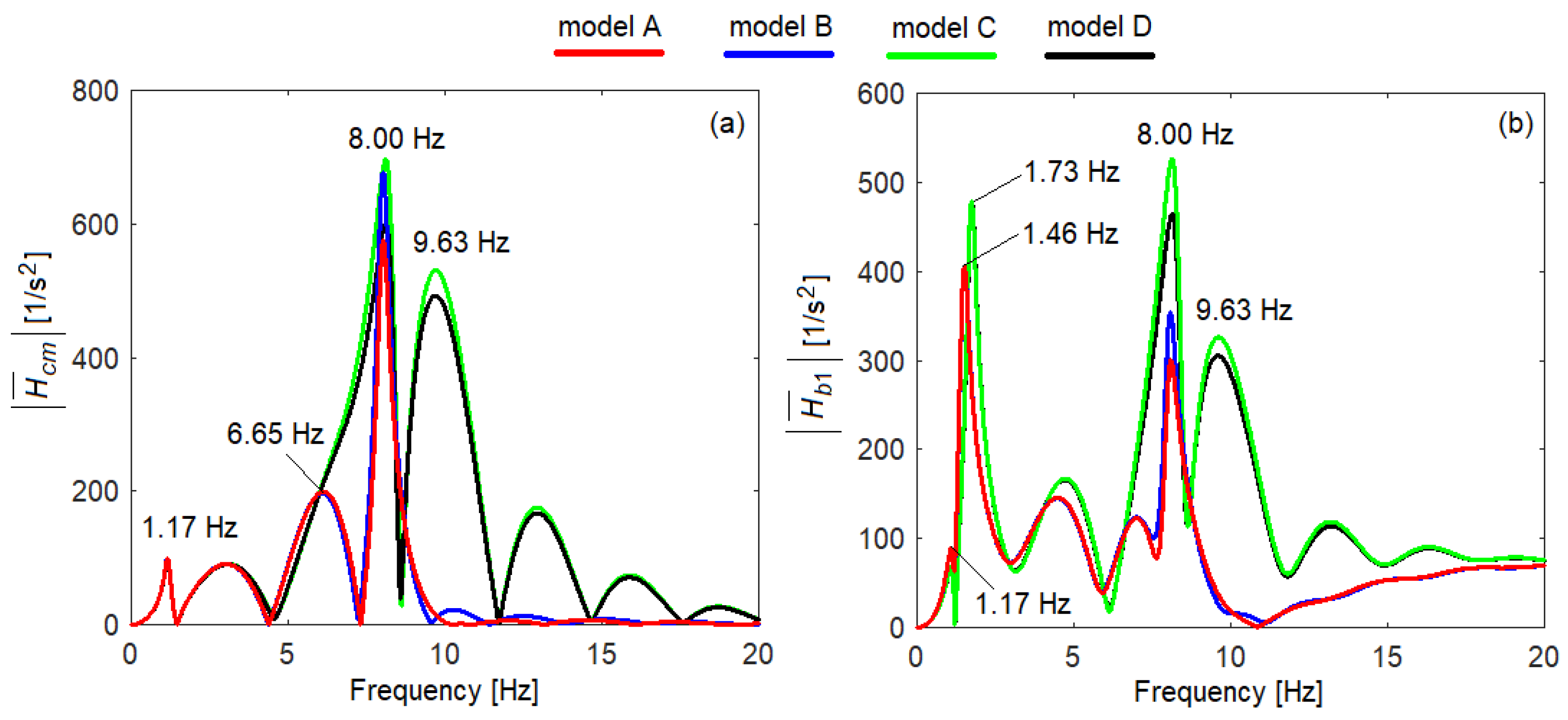
3. Calculation of Frequency Response Functions of the Car Body
- -
- for model A,
- -
- for model B,
- -
- for model C,
- -
- for model D,
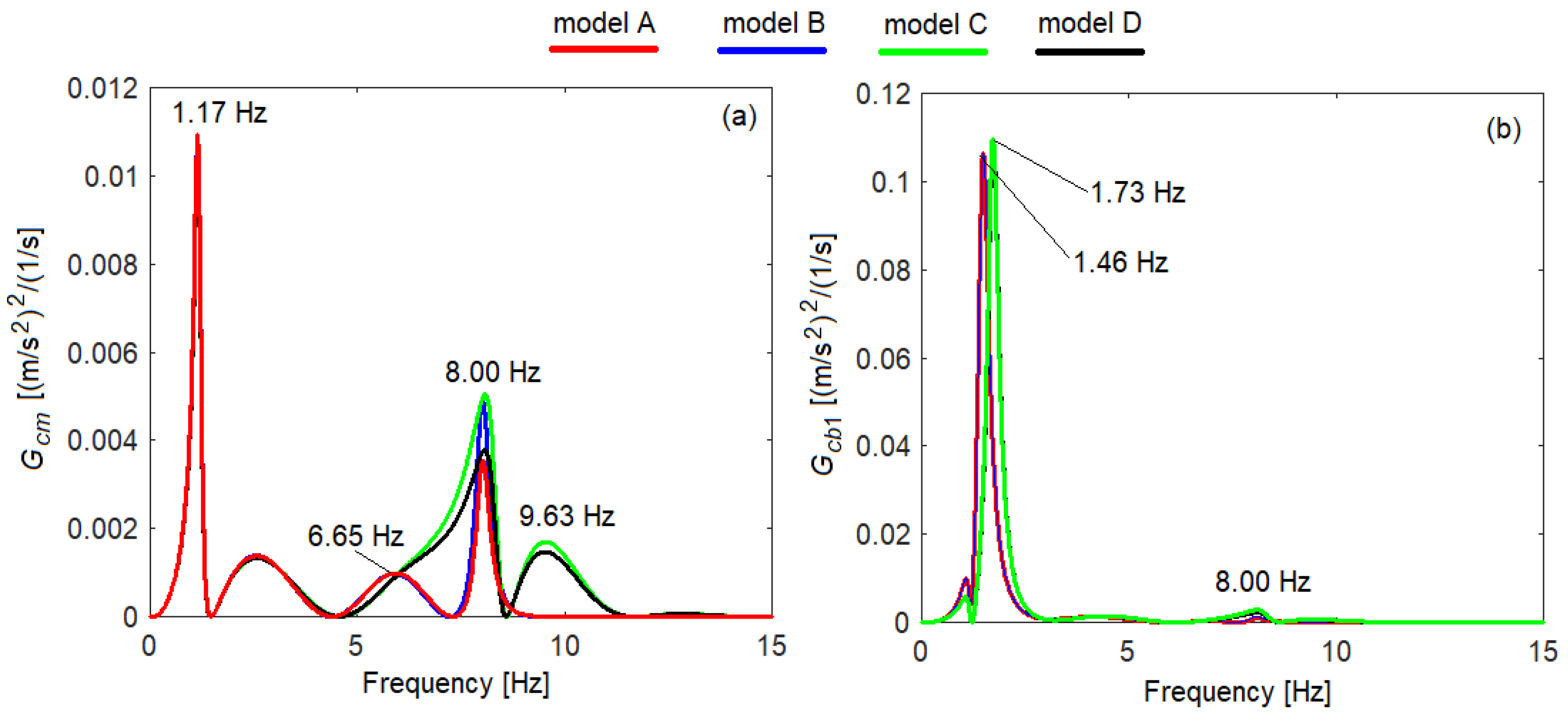
4. Calculation of the Power Spectral Density of the Acceleration of the Car Body
5. Evaluation of the Vertical Vibration Behavior of the Railway Vehicle Car Body Based on Numerical Simulations
5.1. Parameters of the Numerical Model of the Railway Vehicle
5.2. Numerical Simulation Results and Discussion
6. Conclusions
- 1.
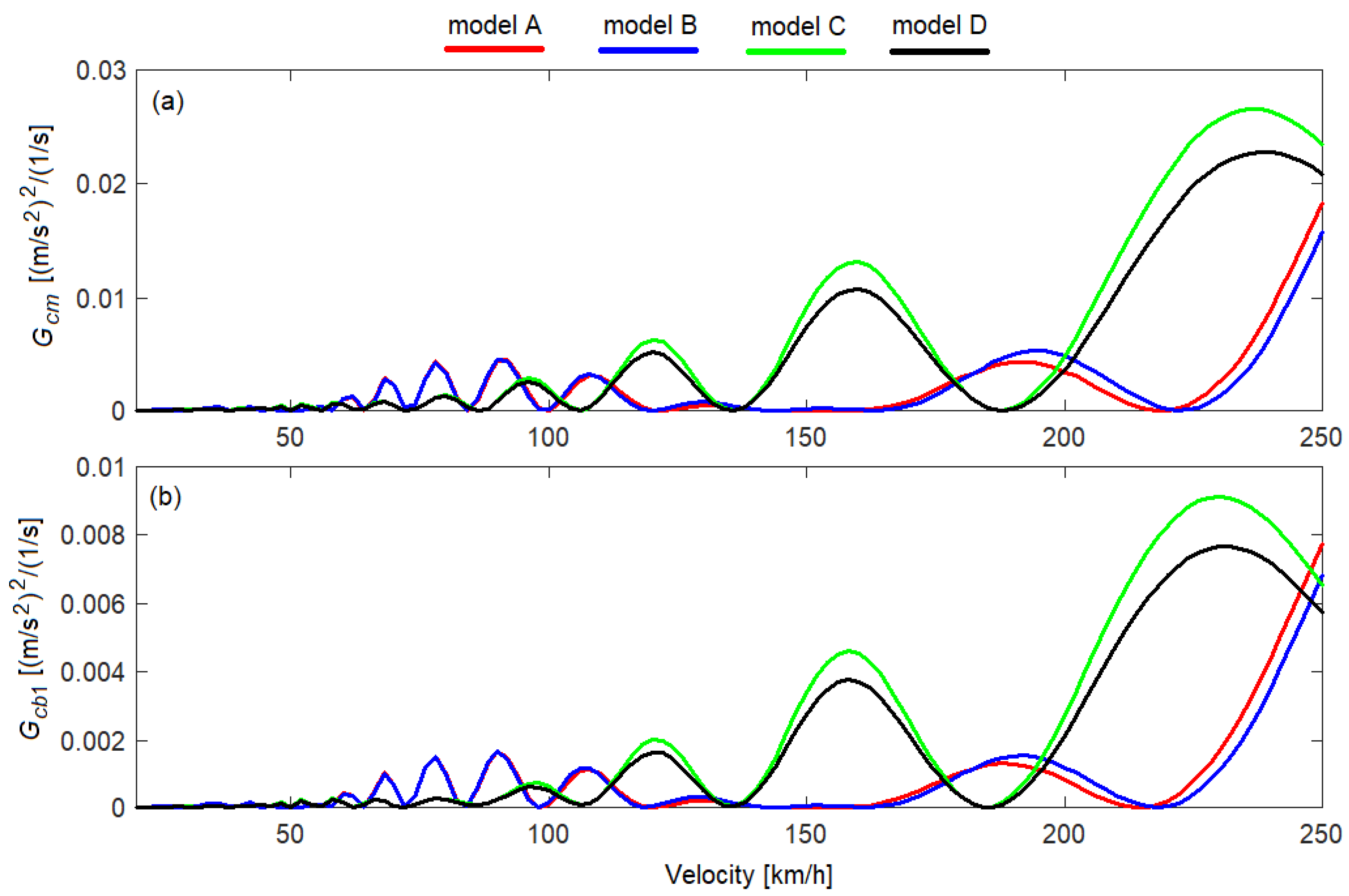
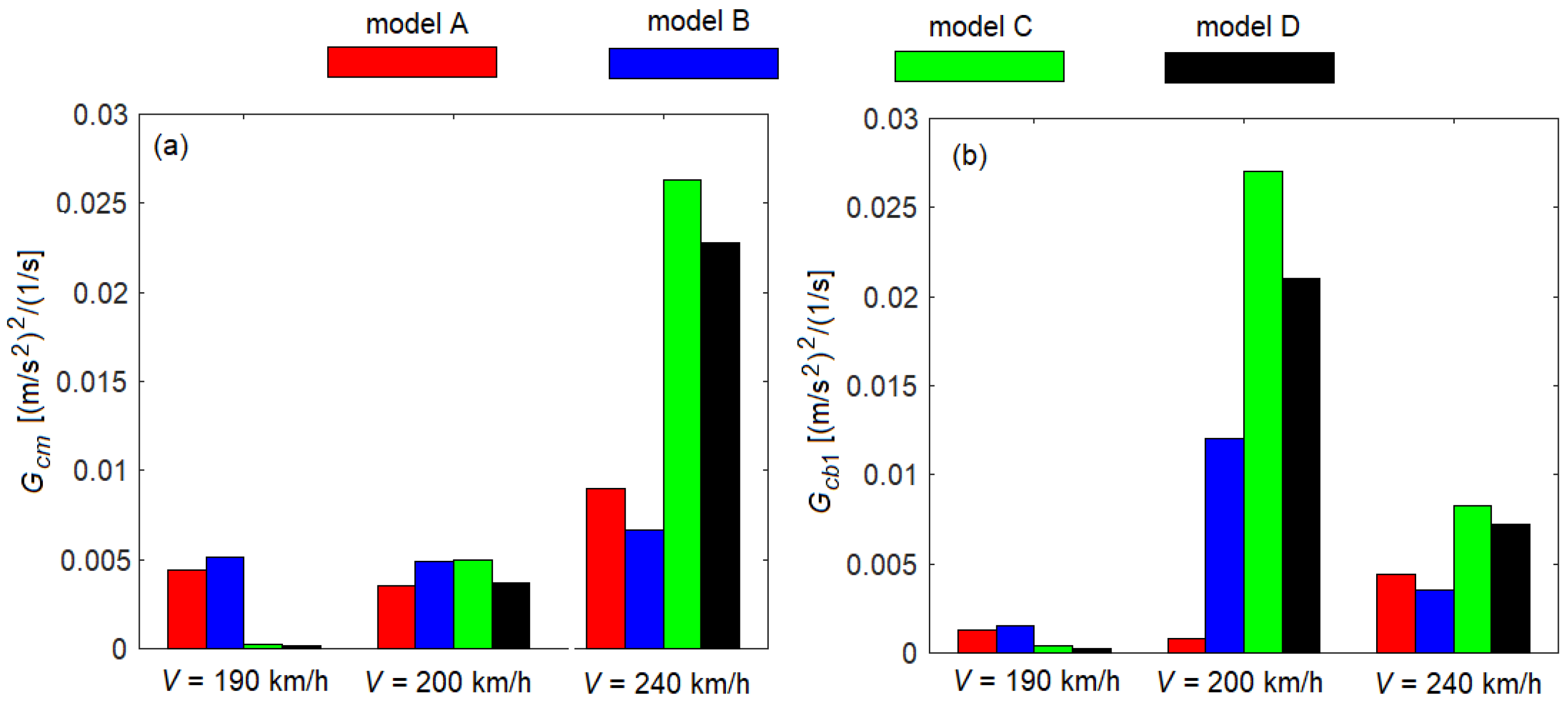
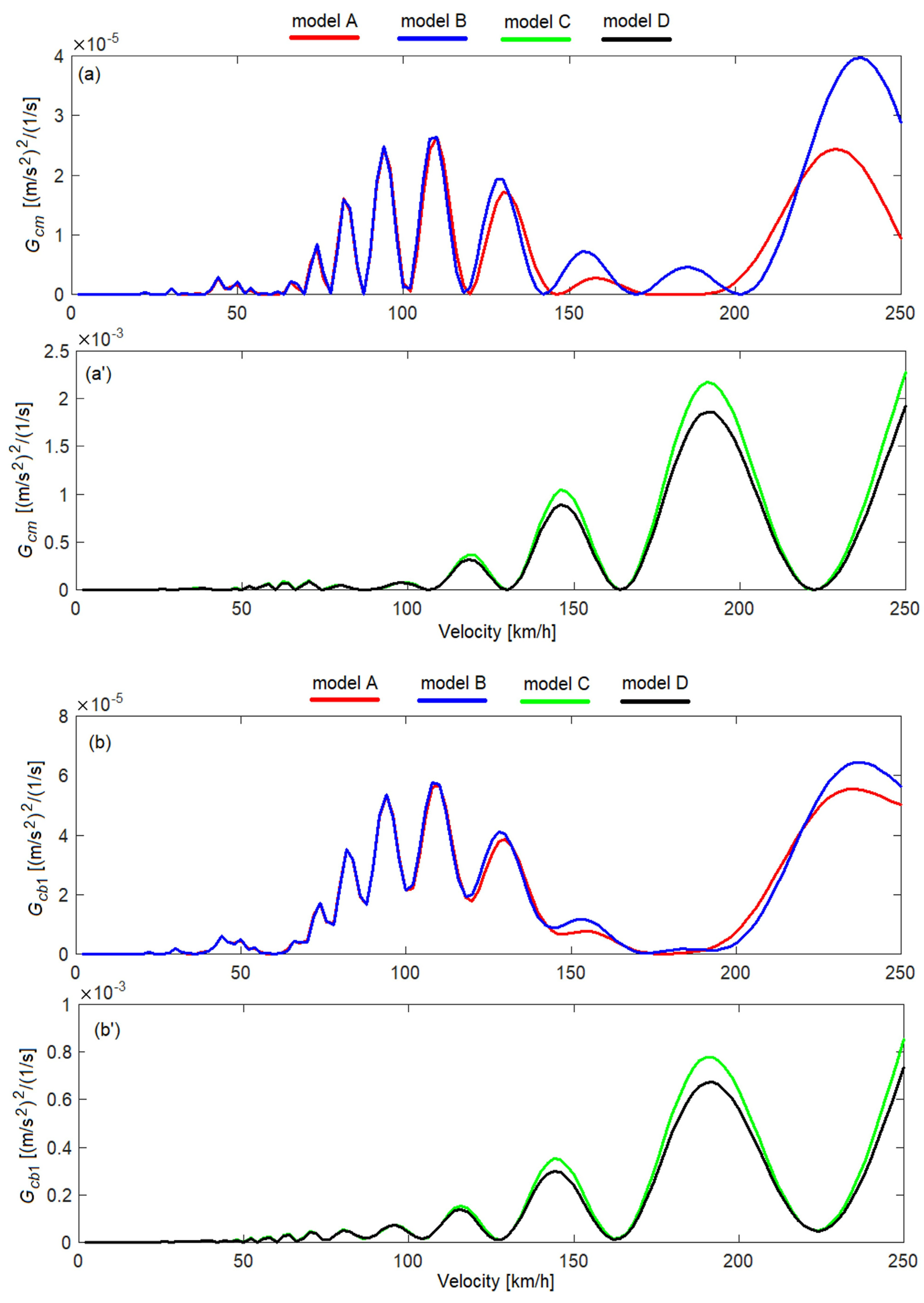
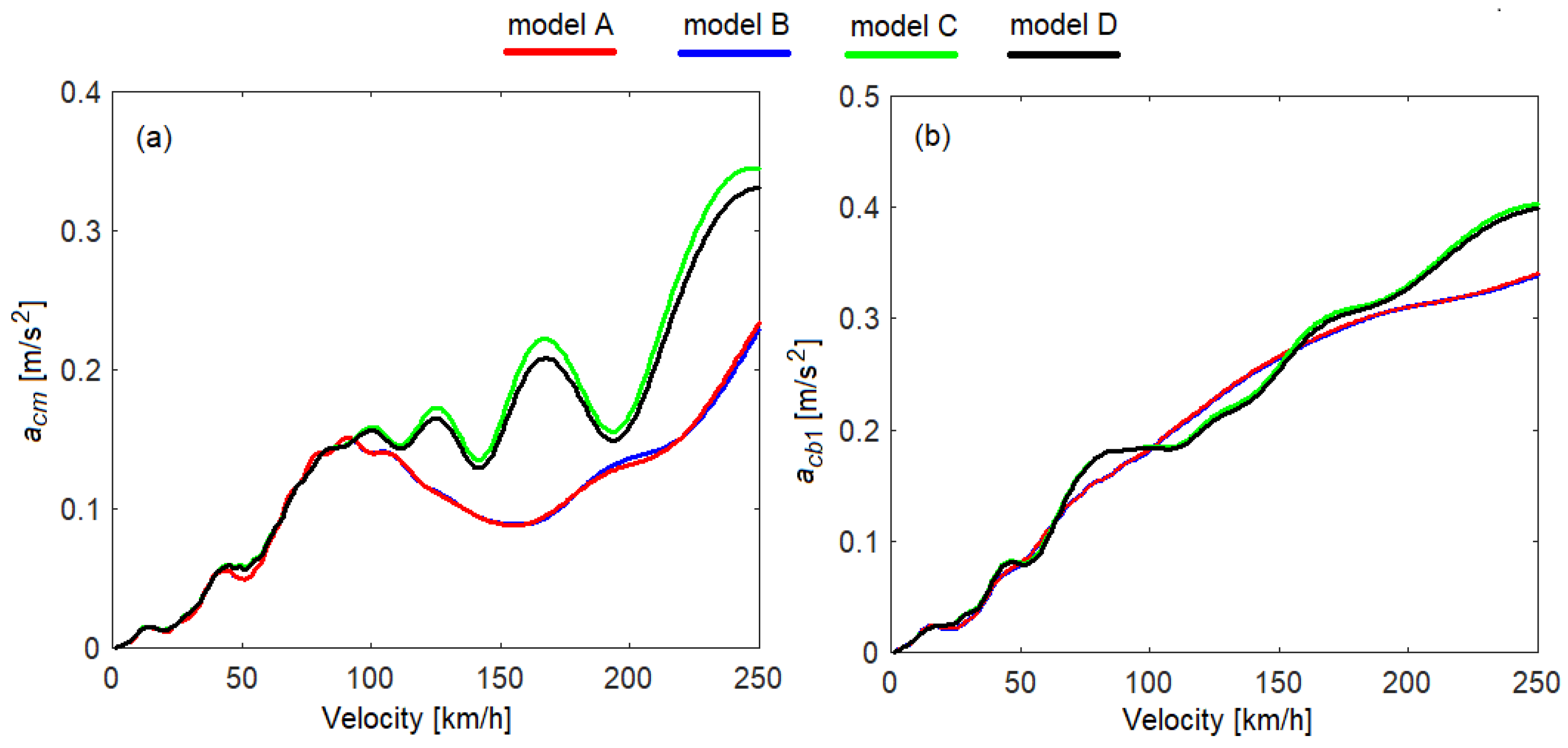
- The influence of the model of the secondary suspension is especially manifested on the vertical bending vibrations of the car body. For all three suspension analysis models, there is a general tendency to increase the level of vertical bending vibration compared to the reference suspension model. This trend may be affected by the geometric filtering effect and by the geometric filtering velocities that change according to the suspension model.
- 2.
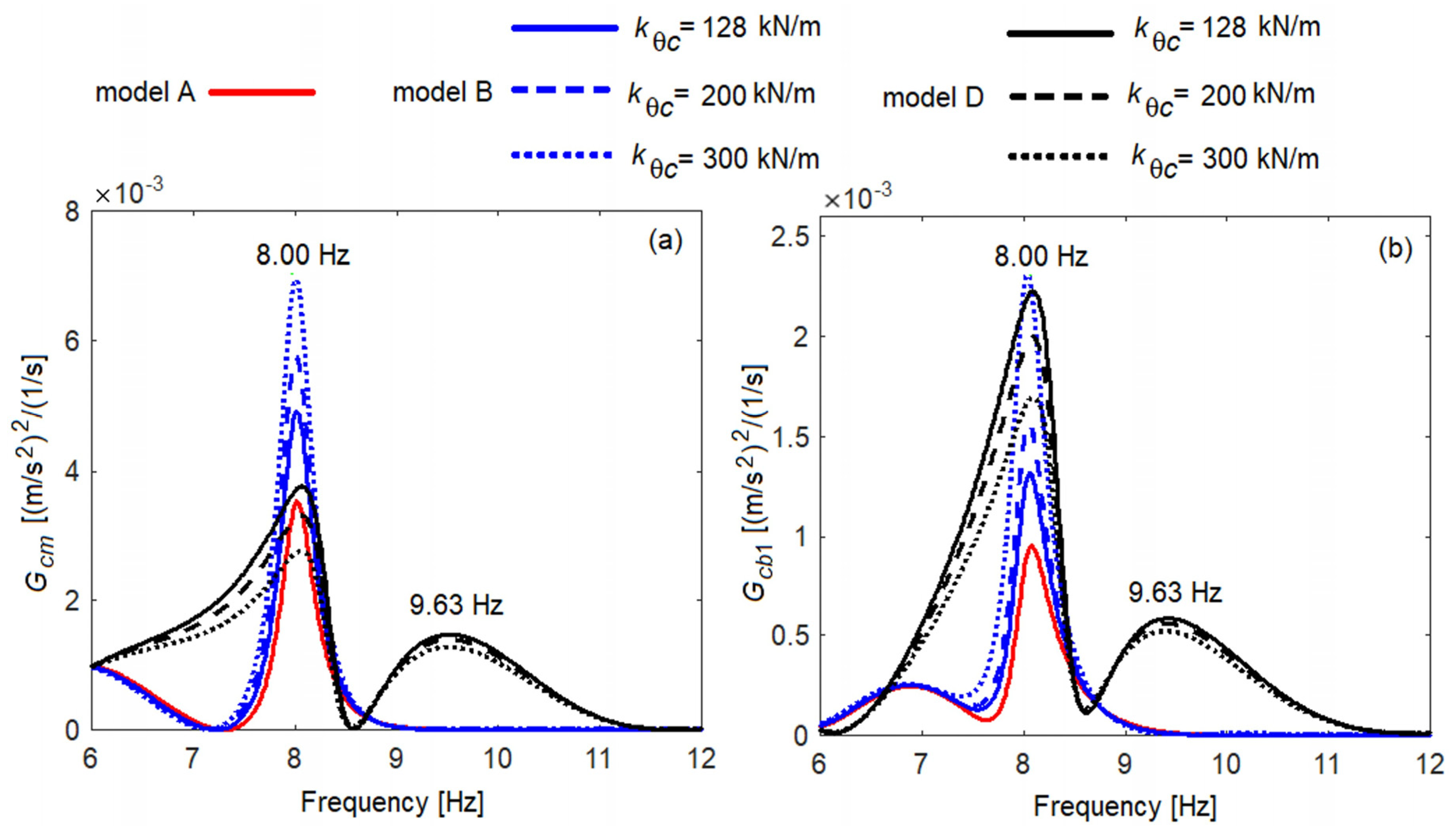
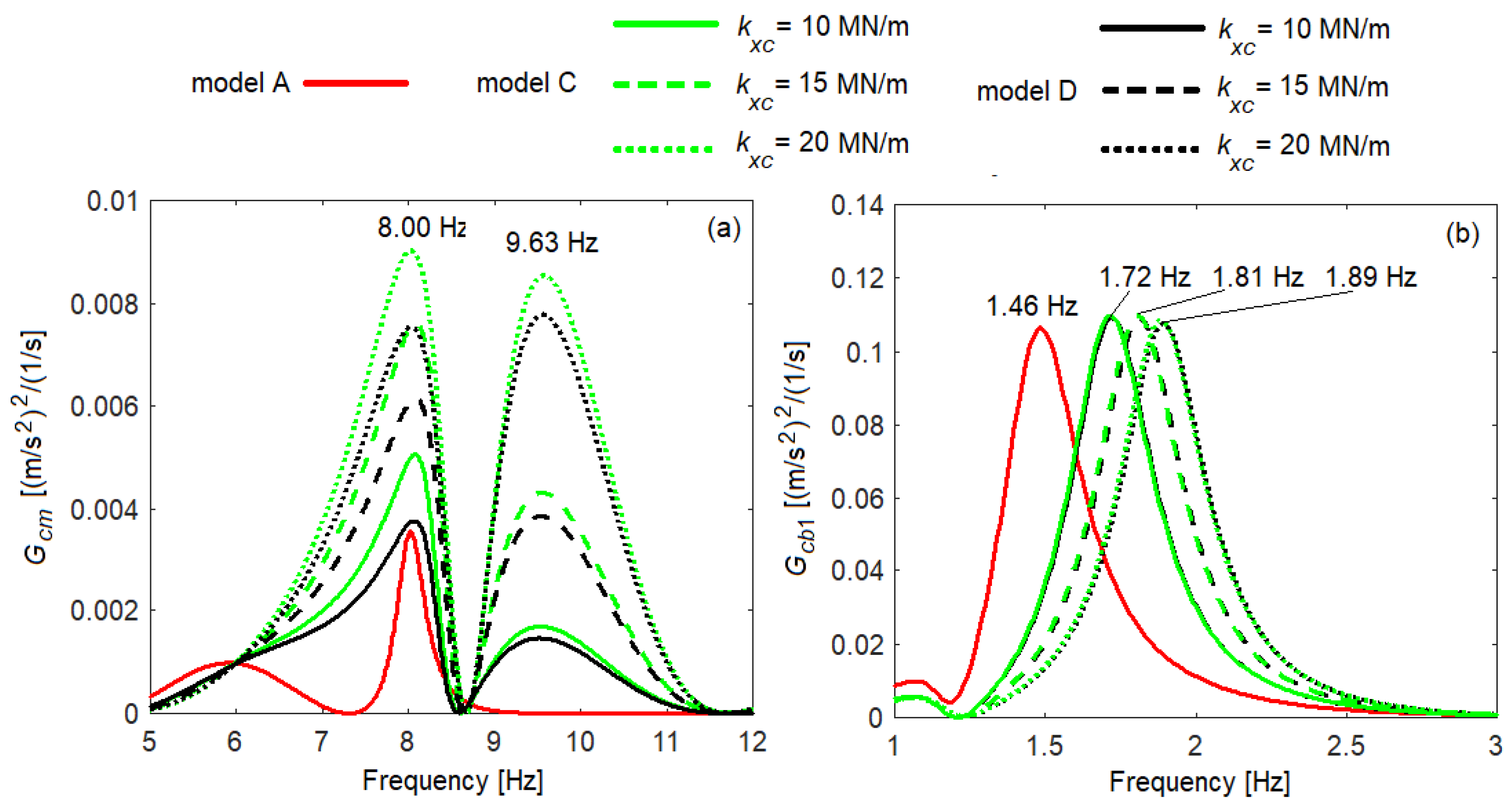
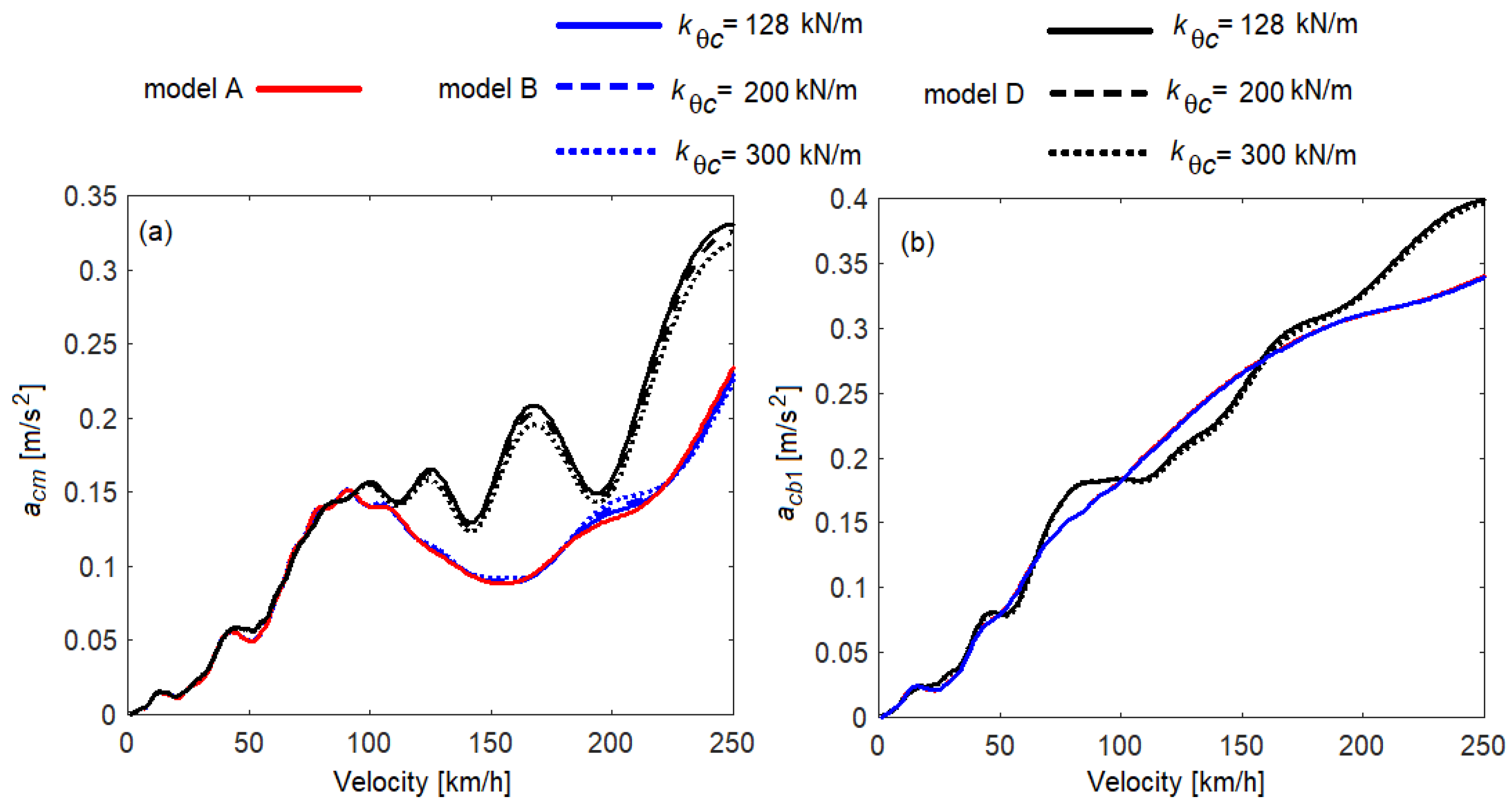
- The pitch vibrations of the car body are influenced only by the transmission system of the longitudinal forces between the bogie and the car body and are included in models C and D of the secondary suspension. It manifests itself by increasing the eigenfrequency of the pitch vibration without important changes in vibration level.
- 3.
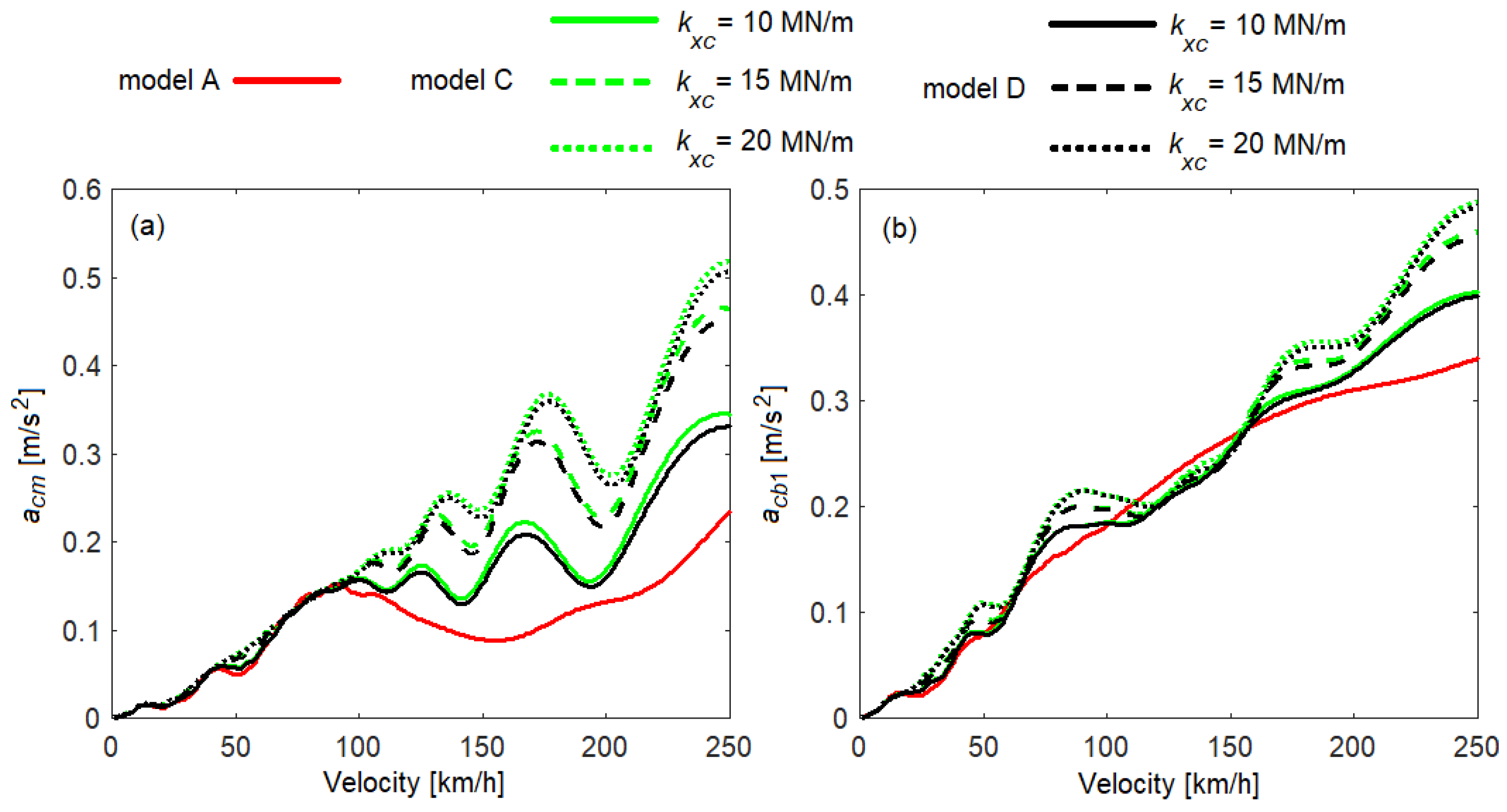
- The vibration level of the car body increases significantly at the eigenfrequency of the pitch vibrations of the bogie for models C and D of the suspension. Under these conditions, it can be concluded that the longitudinal system in the secondary suspension has an important contribution in transmitting the pitch vibrations of the bogies to the car body, while the rotation system contributes less.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- -
- the equations of motion of the car body,
- -
- the equations of motion of the bogies,
Appendix B
- -
- the equations of motion of the car body,
- -
- the equations of motion of the bogies,
Appendix C
- -
- the equations of motion of the car body,
- -
- the equations of motion of the bogies,
Appendix D
- -
- the equations of motion of the car body,
- -
- the equations of motion of the bogies,
References
- Jing, L.; Wang, K.; Zhai, W. Impact vibration behavior of railway vehicles: A state-of-the-art overview. Acta Mech. Sin. 2021, 37, 1193–1221. [Google Scholar] [CrossRef]
- Uehan, F. Recent research and development on numerical simulation techniques in railway dynamics, Quarterly. Rep. RTRI 2020, 61, 86–89. [Google Scholar] [CrossRef] [PubMed]
- Polach, O.; Berg, M.; Iwnicki, S. Simulation. In Handbook of Railway Vehicle Dynamics; CRC Taylor & Francis Group: London, UK, 2006; pp. 359–421. [Google Scholar]
- Evans, J.; Berg, M. Challenges in simulation of rail vehicle dynamics. Veh. Syst. Dyn. 2009, 47, 1023–1048. [Google Scholar] [CrossRef]
- Xu, L.; Zhai, W.; Gao, J.; Meacci, M.; Chen, X. On effects of track random irregularities on random vibrations of vehicle–track interactions. Probab. Eng. Mech. 2017, 50, 25–35. [Google Scholar] [CrossRef]
- Cheli, F.; Corradi, R. On rail vehicle vibrations induced by track unevenness: Analysis of the excitation mechanism. J. Sound Vib. 2011, 330, 3744–3765. [Google Scholar] [CrossRef]
- Dumitriu, M. Analysis of the dynamic response in the railway vehicles to the track vertical irregularities. Part II: The numerical analysis. J. Eng. Sci. Technol. Rev. 2015, 8, 32–39. [Google Scholar] [CrossRef]
- Dumitriu, M.; Cruceanu, I.C. Effect of vertical track irregularities on the vibration of railway bogie. UPB Sci. Bull. Ser. D Mech. Eng. 2019, 81, 67–78. [Google Scholar]
- Lei, X.; Noda, N.A. Analyses of dynamic response of vehicle and track coupling system with random irregularity of track vertical profile. J. Sound Vib. 2002, 258, 147–165. [Google Scholar] [CrossRef]
- Shan, W.; Wu, P.; Wu, X.; Zhang, F.; Shi, H. Effect of wheel polygonization on the axle box vibrating and bolt self-loosening of high-speed trains. IOP Conf. Ser. J. Phys. Conf. Ser. 2019, 1213, 052044. [Google Scholar] [CrossRef]
- Peng, B.; Iwnicki, S.; Shackletona, P.; Crosbee, D.; Zhao, Y. The influence of wheelset flexibility on polygonal wear of locomotive wheels. Wear 2019, 432–433, 102917. [Google Scholar] [CrossRef]
- Liu, K.; Jing, L. A finite element analysis-based study on the dynamic wheel-rail contact behaviour caused by wheel polygonization. Proc. Inst. Mech. Eng. 2020, 234, 1285–1298. [Google Scholar] [CrossRef]
- Mazilu, T.; Dumitriu, M.; Tudorache, C.; Sebesan, M. Wheel/rail interaction due to the polygonal wheel. UPB Sci. Bull. Ser. D Mech. Eng. 2011, 3, 95–108. [Google Scholar]
- Mazilu, T. A dynamic model for the impact between the wheel flat and rail. UPB Sci. Bull. Ser. D Mech. Eng. 2007, 69, 45–58. [Google Scholar]
- Mazilu, T. Geometric model of a railway wheel with irregular contour. Adv. Intell. Syst. Comput. 2016, 356, 155–166. [Google Scholar]
- Dumitriu, M.; Dihoru, I.I. Influence of bending vibration on the vertical vibration behaviour of railway vehicles carbody. Appl. Sci. 2021, 11, 8502. [Google Scholar] [CrossRef]
- Dumitriu, M. On the critical points of vertical vibration in a railway vehicle. Arch. Mech. Eng. 2014, 61, 115–140. [Google Scholar] [CrossRef]
- Bruni, S.; Vinolas, J.; Berg, M.; Polach, O.; Stichel, S. Modelling of suspension components in a rail vehicle dynamics context. Veh. Syst. Dyn. 2011, 49, 1021–1072. [Google Scholar] [CrossRef]
- Eickhoff, B.M.; Evans, J.R.; Minnis, A.J. A review of modelling methods for railway vehicle suspension components. Veh. Syst. Dyn. 1995, 24, 469–496. [Google Scholar] [CrossRef]
- Graa, M.; Nejlaoui, M.; Houidi, A.; Affi, Z.; Romdhane., L. Modeling and control of rail vehicle suspensions: A comparative study based on the passenger comfort. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 260–274. [Google Scholar] [CrossRef]
- Li, F.; Yang, S.; Yang, Z.; Shi, H.; Zeng, J.; Ye, Y. A novel vertical elastic vibration reduction for railway vehicle carbody based on minimum generalized force principle. Mech. Syst. Signal Process. 2023, 189, 110035. [Google Scholar] [CrossRef]
- Wen, Y.; Sun, Q.; Zou, Y.; You, H. Study on the vibration suppression of a flexible carbody for urban railway vehicles with amagnetorheological elastomer-based dynamic vibration absorber. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 234, 749–764. [Google Scholar] [CrossRef]
- Sun, Y.; Gong, D.; Zhou, J.; Sun, W.; Xia, Z. Low frequency vibration control of railway vehicles based on a high static low dynamic stiffness dynamic vibration absorber. Sci. China Technol. Sci. 2019, 62, 60–69. [Google Scholar] [CrossRef]
- Gong, D.; Zhou, J.; Sun, W. Passive control of railway vehicle car body flexural vibration by means of under frame dampers. J. Mech. Sci. Technol. 2017, 31, 555–564. [Google Scholar] [CrossRef]
- Gong, D.; Zhou, J.S.; Sun, W.J. On the resonant vibration of a flexible railway car body and its suppression with a dynamic vibration absorber. J. Vib. Control 2013, 19, 649–657. [Google Scholar] [CrossRef]
- Sharma, S.K.; Sharma, R.C.; Lee, J.; Jang, H.L. Numerical and experimental analysis of DVA on the flexible-rigid rail vehicle carbody resonant vibration. Sensors 2022, 22, 1922. [Google Scholar] [CrossRef]
- Li, B.; Zhou, J.; Gong, D.; You, T. Research on the influence of under-chassis equipment parameters and distribution on car body vibration of high-speed railway vehicle. IEEE Access 2021, 9, 163151–163164. [Google Scholar] [CrossRef]
- Gong, D.; Wang, K.; Duan, Y.; Zhou, J. Car body floor vibration of high-speed railway vehicles and its reduction. J. Low Freq. Noise Vib. Act. Control 2020, 39, 925–938. [Google Scholar] [CrossRef]
- Chen, J.; Wu, Y.; Zhang, L.; He, X.; Dong, S. Dynamic optimization design of the suspension parameters of car body mounted equipment via analytical target cascading. J. Mech. Sci. Technol. 2020, 34, 1957–1969. [Google Scholar] [CrossRef]
- Guo, J.; Shi, H.; Luo, R.; Wu, P. Parametric analysis of the car body suspended equipment for railway vehicles vibration reduction. IEEE Access 2019, 7, 88116–88125. [Google Scholar] [CrossRef]
- Bokaeian, V.; Rezvani, M.A.; Arcos, R. The coupled effects of bending and torsional flexural modes of a high-speed train car body on its vertical ride quality. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019, 233, 979–993. [Google Scholar] [CrossRef]
- Huang, C.; Zeng, J.; Luo, G.; Shi, H. Numerical and experimental studies on the car body flexible vibration reduction due to the effect of car body-mounted equipment. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 103–120. [Google Scholar] [CrossRef]
- Dumitriu, M. Influence of suspended equipment on the carbody vertical vibration behavior of high-speed railway vehicles. Arch. Mech. Eng. 2016, 63, 145–162. [Google Scholar] [CrossRef]
- Dumitriu, M. Effect of the asymmetry of suspension damping on the ride comfort of railway vehicles. Aust. J. Mech. Eng. 2022, 20, 1379–1391. [Google Scholar] [CrossRef]
- Wu, J.; Qiu, Y. Analysis of ride comfort of high-speed train based on a train-seat-human model in the vertical direction. Veh. Syst. Dyn. 2021, 59, 1867–1893. [Google Scholar] [CrossRef]
- Dumitriu, M. Numerical study on the influence of suspended equipments on the ride comfort in high speed railway vehicles. Sci. Iran. 2020, 27, 1897–1915. [Google Scholar] [CrossRef]
- Dumitriu, M.; Stănică, D.I. Effect of the anti-yaw damper on carbody vertical vibration and ride comfort of railway vehicle. Appl. Sci. 2020, 10, 8167. [Google Scholar] [CrossRef]
- Dumitriu, M. Numerical analysis on the influence of suspended equipment on the ride comfort in railway vehicles. Arch. Mech. Eng. 2018, 65, 477–496. [Google Scholar]
- Zhou, J.; Goodall, R.; Ren, L.; Zhang, H. Influences of car body vertical flexibility on ride quality of passenger railway vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2009, 223, 461–471. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Z.; Liu, Z.; Wang, R. A spatial coupling model to study dynamic performance of pantograph-catenary with vehicle-track excitation. Mech. Syst. Signal Process. 2021, 151, 107336. [Google Scholar] [CrossRef]
- Yao, Y.; Zou, D.; Zhou, N.; Mei, G.; Wang, J.; Zhang, W. A study on the mechanism of vehicle body vibration affecting the dynamic interaction in the pantograph–catenary system. Veh. Syst. Dyn. 2021, 59, 1335–1354. [Google Scholar] [CrossRef]
- Dumitriu, M. A new approach to reducing the carbody vertical bending vibration of railway vehicles. Veh. Syst. Dyn. 2017, 55, 1787–1806. [Google Scholar] [CrossRef]
- Dumitriu, M.; Stănică, D.I. Vertical bending vibration analysis of the car body of railway vehicle. In Proceedings of the 23rd Edition of Innovative Manufacturing Engineering & Energy International Conference, Pitești, Romania, 22–24 May 2019; IOP Conference Series: Materials Science and Engineering. IOP: Bristol, UK, 2019; Volume 564, p. 012104. [Google Scholar]
- Dumitriu, M. Study on improving the ride comfort in railway vehicles using anti-bending dampers. Appl. Mech. Mater. 2018, 880, 207–212. [Google Scholar] [CrossRef]
- Dumitriu, M.; Stănică, D.I. Study on the evaluation methods of the vertical ride comfort of railway vehicle—Mean comfort method and Sperling’s method. Appl. Sci. 2021, 11, 3953. [Google Scholar] [CrossRef]
- Dumitriu, M.; Stănică, D.I. An approach to improving the ride comfort of the railway vehicles. UPB Sci. Bull. Ser. D Mech. Eng. 2020, 82, 81–98. [Google Scholar]
- Dumitriu, M.; Cruceanu, C. Influences of carbody vertical flexibility on ride comfort of railway vehicles. Arch. Mech. Eng. 2017, 64, 119–238. [Google Scholar] [CrossRef]
- Meirovitch, L. Elements of Vibration Analysis; McGraw-Hill International Edition: New York, NY, USA, 1986; pp. 235–238. [Google Scholar]
- International Union of Railways. Interaction between Vehicles and Track, RP 1, Power Spectral Density of Track Irregularities, Part 1: Definitions, Conventions and Available Data; No. C116; UIC: Utrecht, The Netherlands, 1971. [Google Scholar]
- Gong, D.; Gu, Y.J.; Song, Y.J.; Zhou, J. Study on geometry filtering phenomenon and flexible car body resonant vibration of articulated trains. Adv. Mater. Res. 2013, 787, 542–547. [Google Scholar] [CrossRef]
- Zhou, J.; Wenjing, S. Analysis on geometric filtering phenomenon and flexible car body resonant vibration of railway vehicles. J. Tongji Univ. 2009, 37, 1653–1657. [Google Scholar]
- Stănică, D.I.; Dumitriu, M.; Leu, M. The geometric filtering effect on ride comfort of the railway vehicles. UPB Sci. Bull. Ser. D Mech. Eng. 2021, 83, 137–154. [Google Scholar]
- Sebeşan, I.; Dumitriu, M. Validation of the theoretical model for the study of dynamic behavior on vertical direction for railway vehicles. Ann. Fac. Eng. Hunedoara Int. J. Eng. 2014, 12, 153–160. [Google Scholar]
- Dumitriu, M. On-line running tests for validating the numerical simulations of the vertical dynamic behavior in railway vehicles. Appl. Mech. Mater. 2014, 657, 609–613. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Parameters of the Car Body and the Bogies | |
|---|---|
| Car body mass | mc = 34,000 kg |
| Bogie mass | mb = 3200 kg |
| Car body inertia moment | Jc = 1,963,840 kg·m2 |
| Bogie inertia moment | Jb = 2048 kg·m2 |
| Car body length | lc = 26.4 m |
| Car body wheelbase/bogie wheelbase | 2ac = 19 m; 2ab = 2.56 m |
| The elevations of the transmission system of the longitudinal forces between the bogie and the car body | hc = 1.3 m; hb = 0.2 m |
| Bending stiffness | EcIc = 3158 × 109 Nm2 |
| Modal parameters of the car body | |
| Modal mass | mmc = 35,224 kg |
| Modal stiffness | kmc = 88.998 MN/m |
| Modal damping | cmc = 53.117 kNs/m |
| Primary suspension parameters | |
| Vertical stiffness of the primary suspension | kzb = 1.1 MN/m |
| Vertical damping of the primary suspension | czb = 13.05 kNs/m |
| Secondary suspension parameters | |
| Vertical stiffness of the secondary suspension | kzc = 0.6 MN/m |
| Vertical damping of the secondary suspension | czc = 17.22 kNs/m |
| Pitch stiffness of secondary suspension | kθc = 128 kN/m |
| Damping stiffness of secondary suspension | cθc = 1 kNm |
| Stiffness of the transmission system of the longitudinal forces between the bogie and the car body | kxc = 10 MN/m |
| Damping of the transmission system of the longitudinal forces between the bogie and the car body | cxc = 25 kNs/m |
| Vibration Mode | Suspension Model | Frequency [Hz] |
|---|---|---|
| Carbody bounce | Model A, Model B, Model C, Model D | 1.17 Hz |
| Carbody pitch | Model A, Model B | 1.46 Hz |
| Model C, Model D | 1.72 Hz | |
| Carbody vertical bending | Model A, Model B, Model C, Model D | 8 Hz |
| Bogie bounce | Model A, Model B, Model C, Model D | 6.65 Hz |
| Bogie pitch | Model A, Model B, Model C, Model D | 9.63 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dumitriu, M.; Apostol, I.I.; Stănică, D.I. Influence of the Suspension Model in the Simulation of the Vertical Vibration Behavior of the Railway Vehicle Car Body. Vibration 2023, 6, 512-535. https://doi.org/10.3390/vibration6030032
Dumitriu M, Apostol II, Stănică DI. Influence of the Suspension Model in the Simulation of the Vertical Vibration Behavior of the Railway Vehicle Car Body. Vibration. 2023; 6(3):512-535. https://doi.org/10.3390/vibration6030032
Chicago/Turabian StyleDumitriu, Mădălina, Ioana Izabela Apostol, and Dragoș Ionuț Stănică. 2023. "Influence of the Suspension Model in the Simulation of the Vertical Vibration Behavior of the Railway Vehicle Car Body" Vibration 6, no. 3: 512-535. https://doi.org/10.3390/vibration6030032
APA StyleDumitriu, M., Apostol, I. I., & Stănică, D. I. (2023). Influence of the Suspension Model in the Simulation of the Vertical Vibration Behavior of the Railway Vehicle Car Body. Vibration, 6(3), 512-535. https://doi.org/10.3390/vibration6030032