Abstract
The rapid increase in the integration of renewable energy sources into the electrical grid is posing new challenges for the dynamic responses due to the global inertia reduction. In this regard, the impact on frequency stability of such reduction and the potential support from wind power have been investigated lately. However, it is well-known that the variability of wind power and its reduced inertia may not be enough to handle the power unbalance. Energy storage systems (e.g., batteries) may provide the required additional flexibility to ensure proper response. In this paper, an analysis of how the different control loops for frequency support on wind power and batteries interact and perform is presented. To gain insights from the different impacts, a sensitivity analysis comparison for frequency regulation through (i) inertia and droop control of a variable speed wind turbine and (ii) battery is performed. The analysis was carried out through simulations using the well-known 4 generator 2-area model adapted to include a wind farm. From a battery perspective, its ramping capabilities were varied to provide frequency regulation. The paper shows how, depending on the control parameters and battery size, the frequency response may even become unstable due to interactions of the various pieces of technology. Thus, it shows that coordinated actions, control optimization and grid status among different actors on the grid (as battery and wind) is required for stable operation.
1. Introduction
The steady increase in adoption of renewable energy sources (RES) to reduce emissions and make electrical grids sustainable worldwide has led to a large increase in wind power penetration. With offshore technology becoming commercial, the share of wind power is set to expand further. Due to this increasing contribution of RES, especially wind, there is concern over the reducing inertia and balancing the disturbances caused their variable nature. Wind turbines (WTs) are not capable of providing inertia, as they are decoupled from the grid through converters [1]. In addition, many nuclear and thermal power plants are being shut down worldwide, and the rising costs and supply-chain issues surrounding gas imports have increased concerns about the future of grid stability [2]. Inertia is essential in the grid, as it helps avoid changes in frequency by providing power over a short period of time. It provides the system with enough time to not destabilize before additional generation is completed or a load is shed [3].
Inertia control has generally been performed by governor control of synchronous machines and swing or backup generators. Depending on the country, the frequency is either 50 or 60 Hz, and during generation or load imbalance, the frequency starts deviating from these base values. The rate of change of frequency (ROCOF) is given by the swing equation:
where is the ROCOF; is the system frequency; , , and are the system inertia constant, generator rated power, mechanical power and electrical power, respectively.
Traditionally, wind power plants (WPPs) do not participate in frequency regulation, as older permanent magnetic synchronous generator (PMSG) turbines operate in maximum power point tracking (MPPT) mode and their speed cannot be altered to vary their output power. Coordinated PMSG wind turbine control strategies have been developed to emulate the combined inertia response of WTs and generator to provide a short-term frequency response, but are still not preferred [4]. However, newer variable-speed wind turbines (VSWTs) can be controlled externally through several mechanisms to provide an inertia response [5,6,7,8,9]. For example, inertia control injects energy into the system based on the ROCOF, and droop control works with the difference between frequency levels [10,11]. On the other hand, deloading control shifts the WT operating point from the optimal to a reduced power level. The deloading is performed through speed and pitch angle control [12,13,14]. Reference [15] provides a control scheme for an isolated power system using optimum deloading techniques through static converters and pitch control, and rotor speed and active power variations. However, the frequency nadir with just integral control loop provides a marginal improvement over that of a primary frequency response without the control loop.
These WT control strategies can be combined and integrated with other generators in the grid to implement better frequency controls. Reference [16] proposes a coordinated control strategy with time-varying gains of inertia and droop control loops. The control loop gains depend on the desired frequency-response time, and initial gains are based on wind speed and operating conditions of each WT in the farm. Reference [17] formulates a coordination strategy between WT droop control and synchronous machines such that the conventional generators activate power injection from the start of frequency drop. This control leads to a lower frequency deviation value. Nevertheless, there is no improvement in the total time required to bring back the frequency to the threshold. Reference [18] provides a hierarchical control system structure for coordinating WTs and reducing the total number of turbines used for frequency regulation. Three layers of wind farm management are used, along with wind farm control and WT control, to share information among the wind farms, traditional power plants and system dispatching center. The WT control is responsible for tracking the reference active power value and transmitting information, such as output power, available frequency control power, wind speed, rotor speed, pitch angle and other operation status indicators of the WTG to the wind farm management layer. However, for the two active power control methods, rotor speed control and pitch angel control, the pitch angle control is slower and leads to more mechanical wear compared with the rotor speed control. Thus, it is considered that the reserve power quality provided by rotor speed control is better than the pitch control. However, the sensitivity of the WT response due to the variations of the inertia and droop constant was not studied in detail. With numerous WT control models, it is important to not only compare them but also evaluate how they perform with various degrees of sensitivity in different scenarios. In [19], a comparison is made between the performance of an actual WPP and a detailed model containing different gains of the inertial controller. However, gains are not varied by large values, and the approach is not compared with alternative methods of frequency control.
Lately, energy storage systems, especially batteries, have emerged as a popular option to provide primary frequency support. Batteries are not just capable of responding within a few seconds, but can also continuously supply power over longer periods. This could help eliminate the need for secondary or tertiary reserves in many cases [20,21,22]. Moreover, batteries can be charged with the excess energy generated from the WPPs. In fact, the possibility of providing frequency regulation combined with renewable energy arbitrage has been one of the key areas of interest for wind power plant operators [23].
As mentioned earlier, inertia in a power conventional power grid is provided by synchronous generators in thermal power plants through governor control. That is, in the event of a frequency drop, additional power can be supplied by the synchronous machines to balance the system. However, these are slow, as they take a few seconds to respond. Meanwhile, output from electrochemical energy storage technologies such as batteries and supercapacitors is almost instantaneous, and energy can be provided over a longer time duration as compared to inertia and droop responses of WTs. Numerous studies with battery energy storage system (BESS) control strategies have effectively shown suitability for frequency regulation in largely wind-powered systems [24,25,26,27,28,29,30,31,32,33]. Reference [24] depicts a BESS and WT pitch angle control. The pitch control is activated only when battery state of charge (SOC) is below 40%, and the synchronous generator responds at 30% SOC, charging the battery and bringing SOC levels back to 50%. Reference [25] assesses the impacts of various aggregated and distributed energy storage technologies in a wind farm. Reference [26] presents lithium-ion battery (LiB) control to limit damping power associated with inter area low frequency oscillations in a wind power plant. Reference [28] shows an SOC-control-based scheme and response time between generators and BESS to control wind frequency deviations. Reference [31] considers a WPP and a BESS together as a virtual power plant (VPP) to provide both energy and frequency regulation in energy markets. The cooperation strategy deploys a BESS during insufficient generation from the WPP, considering its cycle number and energy change functions to improve battery lifetime. Battery and supercapcitor combinations have also been widely studied for frequency regulation applications to provide faster responses and reduce battery size and overall costs [30,34,35,36,37,38,39,40].
Thus, different but complementing strategies can be used to provide better grid support. Simultaneous wind–battery control can be an effective strategy to avoid frequency imbalances, as it could reduce reliance on just one type of support. However, in-depth sensitivity analysis on the impact of different WT control strategies and their comparison with a BESS need to be studied further. In this paper, we explore WT control strategies that incorporate a battery to study their individual impacts on frequency regulation in the event of a grid disturbance. We also analyze the combined effect of the two controls and vary their response capabilities to encourage better control strategies with improved frequency regulation.
2. Materials and Methods
Frequency Support from Wind Turbine Control and BESS
As mentioned, in the event of rapid frequency changes, the WT is capable of regulating itself through several means. In our study, we used inertia and droop control methods, as they are capable of injecting sufficient momentary power into the grid without deloading the WT and causing stress on the turbine blades.
Inertia Response: In the case of VSWTs, the rotating mass is mechanically decoupled from the grid and the kinetic energy (KE) cannot provide a direct inertia response like the synchronous generators for frequency balancing. However, doubly-fed induction generators (DFIGs) can be operated to slow down and release this KE into the grid for a few seconds and provide inertia into the system for 10 s. This provides sufficient time for the synchronous generator to activate its governor control to further balance the frequency within 30 s (primary control). Afterwards, slower secondary and tertiary controls are activated to bring the frequency levels back to threshold values [41].
where is the kinetic energy, J is the moment of inertia of the wind rotor and is the rotational speed.
The inertia constant H represents the time duration for which the wind generator can provide nominal power (S) by using kinetic energy.
Droop Control: It is a popular method used by wind generators to imitate the governors of conventional generators by regulating the active power output from a WT proportionally to frequency change.
where , and R are nominal frequency, measured frequency and the droop constant, respectively.
The default inertia constant was selected as 5.04 and the droop constant as 0.05. These were later modified to observe the best response (please see the Figure 1).
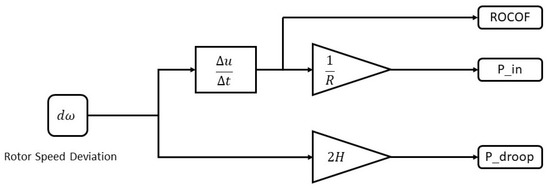
Figure 1.
Frequency regulation block with inertia and droop controls.
Battery Control: Unlike synchronous generators, batteries can inject and absorb power from the grid within seconds. The battery control algorithms can be modified to inject appropriate power into the grid as soon as there is a frequency drop. This can be done by responding to (i) frequency deviations in the grid and (ii) the ROCOF in the system.
The battery SOC at a given time is the ratio of available energy to the rated energy of the battery.
The operation of the BESS is limited by:
where is the energy stored in the battery at time t and is the rated energy of the battery. The battery parameters were set according to Table 1 [30,42,43,44]. We assumed an energy rating higher than what is needed in order for the BESS to be able to supply sufficient energy for the whole simulated time period.

Table 1.
BESS parameters.
3. Case Study and Sensitivity Analysis
To compare the response sensitivity of the WT control and a battery, an existing Kundur two-area system was used and modified. The Simscape–MATLAB model simulated a grid system with a synchronous machine as a swing generator (M2), a DFIG wind turbine and a load in Area 1. An additional load of 200 MW was connected via a breaker that switched at 50 and 100 s, creating a frequency drop and rise, respectively. In Area 2, there were two synchronous machines (M3 and M4) and a load. A constant wind speed was assumed over the restricted simulation time (please see the Figure 2 and Table 2).
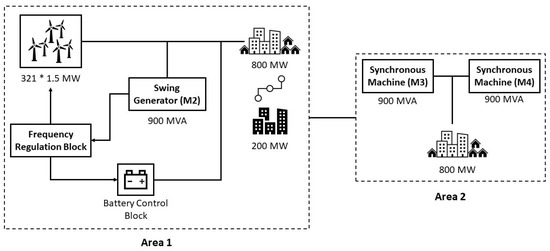
Figure 2.
Two-area model.
Table 2.
Parameters of the two-area model.
The sensitivity of the response to the frequency disturbance was measured for both under-frequency and over-frequency. Different cases were studied to observe the frequency response by the WT and the BESS.
3.1. Case I: No Frequency Control
The response of the WT was studied without any frequency control to establish the base condition. At 50 s the load switch was connected, which led to the addition of 200 MW to the system. Consequently, there was a large frequency drop, and the frequency tried to settle after a few seconds. The frequency nadir was observed at 59.4 Hz. At 100 s, the additional load was disconnected, and the frequency increased but settled at around 60 Hz after a few seconds. Since there was no external frequency regulation, the synchronous generators (M2, M3, M4) responded to provide the extra power at after a few seconds to compensate for the frequency drop (please see the Figure 3).
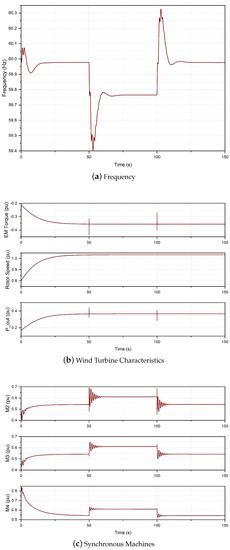
Figure 3.
Behavior of grid frequency, WTs and synchronous machines during no frequency control conditions.
3.2. Case II: Inertia and Droop Control
The inertia and droop constant were varied to study the best response that the WT can provide by itself. We compared the frequency responses of the default values of inertia constant (H = 5.04) and droop constant (R = 0.05) and {varied their values to check system stability. In all scenarios, at 50 s the frequency settled at a higher value compared to Case I, and the frequency nadir was greater with the default inertia and droop constant (A). When the inertia constant was increased and the droop constant reduced, the output power from the WT for frequency regulation also increased. The lowest frequency drop was observed with C and D. However, since additional power from the WT can be supplied only for a few seconds, there was a second drop in the frequency (C and D), and it finally settled at a lower value than that in default constant scenario (A) and could also cause further instability. From Table 3 and Figure 4, we can conclude that in the case of a frequency response though only inertia and droop control, scenario B would be the best option. The wind turbine control clearly prevents a large initial drop, giving time to the synchronous machines to balance the frequency.
Table 3.
Inertia and droop constant values for frequency control through WT.
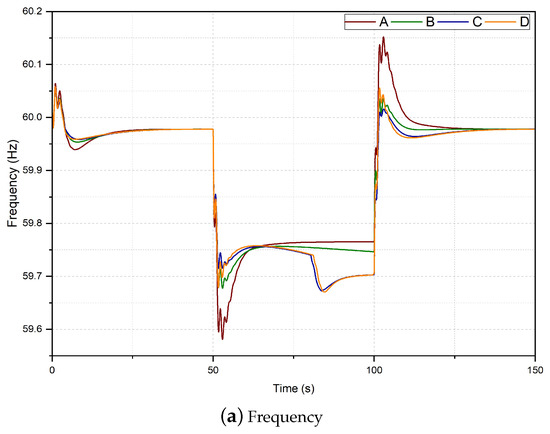
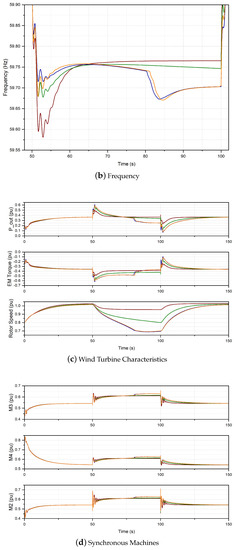
Figure 4.
Variations in grid frequency, WTs’ and synchronous machines’ responses during different inertial and droop control scenarios.
3.3. Case III: Battery Control
In this case, inertia and droop controls were turned off, and only the battery provided frequency support. The battery responded according to both frequency deviation and ROCOF, and the battery-response-controlling gains were varied. For lower gains (A), the battery had a slow response to the frequency drop, and the synchronous machines also participated in balancing. In the best case scenario (C), at 50 s, the battery responded very quickly by supplying power instantaneously and prevented a frequency drop. Moreover, the frequency was stabilized faster and at a higher value than in Case II. No significant increase in output from synchronous machines was observed, so we conclude that they did not participate in providing frequency support, and all the power was supplied by the battery. At 100 s, the battery absorbed the excess energy and stabilized the frequency at very close to 60 Hz. Thus, optimal gains can be selected to increase or reduce sensitivity of the battery towards frequency changes (please see the Figure 5 and Table 4).
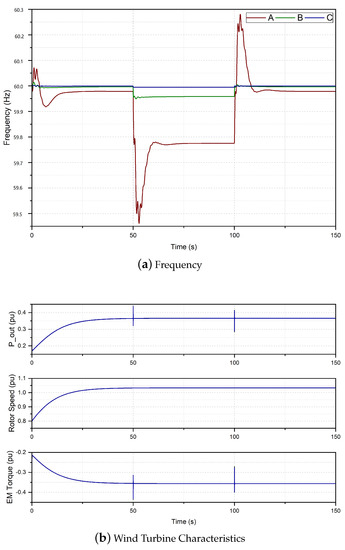
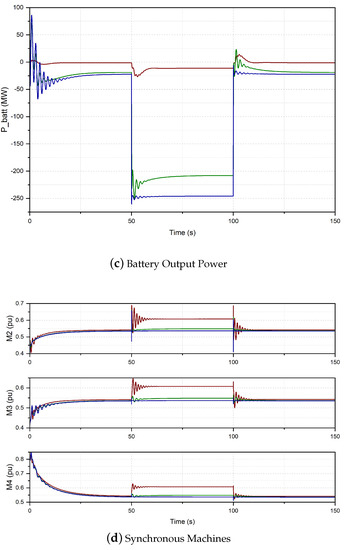
Figure 5.
Variations in grid frequency, WTs’, and synchronous machines’ responses during different battery control scenarios.
Table 4.
Battery gain multipliers.
3.4. Case IV: Inertia, Droop and Battery Control
Both inertia and droop control and battery control were turned on. The best H and R values from Case II were selected to allow maximum possible support from the wind turbine first and the rest through the battery. The battery ramp rates were varied similarly to Case III. In A, the battery control gains were too low for it to respond. The frequency regulations was solely provided by the wind turbine and the synchronous machines, and the output power from the battery was zero. On the other hand, when battery control gains were extremely high (C), neither wind nor synchronous machines contributed at all to frequency regulation.
If we reduce the battery’s sensitivity (that is, reduce its response capabilities), we can observe that the inertia and droop control will kick in first. Meanwhile, the battery will also respond by providing less power. The contribution of the synchronous machines is negligible, showing that the wind turbine control and battery can be sufficient for handling frequency imbalances (please see the Table 5 and Figure 6).
Table 5.
WT control and BESS gain parameters.
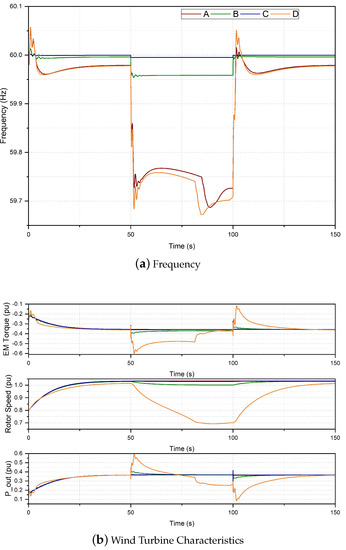
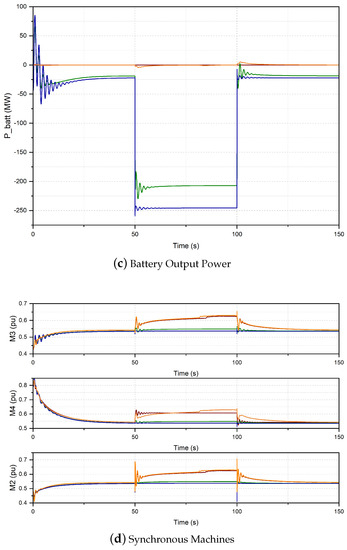
Figure 6.
Variations in grid frequency, WTs’, and synchronous machines’ responses for different wind-battery combined control parameters.
4. Results and Discussion
The individual and hybrid wind-battery frequency control schemes allow better regulation than conventional generators. The response depends on the control parameters and varies depending on the sensitivity of frequency regulation strategies.
In Case II, a highly sensitive WT control strategy leads to a possible further destabilization of the frequency, as seen in Figure 4a. During controls C and D, the first frequency drop is much lower than in Case A at 59.72 or 59.67 Hz, respectively. However, after t = 80.5 s, the WT cannot provide any more extra power, and the frequency sees a second drop of 59.67 Hz for both. In such a scenario, a slight compromise in frequency nadir can provide a more stable response by the wind turbine.
In Case III, when only a BESS is connected, depending on the control, it either maintains the frequency very close to 60 Hz or for very low sensitivity, drops till 59.45 Hz. For the medium-sensitivity control scenario (Case B), the BESS only allows a drop till 59.55 Hz; see Figure 5a. Highly sensitive control would lead to constant battery engagement with grid and could impact its overall health. While the long-term performance of a BESS is outside the scope of this study, it is imperative to note that the battery lifetime is greatly affected by many factors. Various studies have shown that modifying battery cycling, the depth of discharge levels [45] and even charge–discharge protocols can improve battery life [46,47,48,49,50]. Li-ion is the most commonly used battery technology, and recent studies have demonstrated improvements in their cyclability [51,52]. However, they still generally have short cycle lives (10 cycles) as compared to supercapacitors (10 cycles) [53] and need to be improved. Future energy systems are likely to have more frequency disturbances due to their large shares of variable renewables, which will lead to increased demand from the battery, and its overall lifetime would be impacted. More studies are needed to understand the relationships between different battery applications and its lifetime.
Therefore, the optimum strategy would be combining the best responses of both the WT and the battery to avoid reliance on a single means of control (Case IV). Figure 6a,b show that the battery’s response can be limited to allow WTs to simultaneously respond and support each other. The operators can optimize the sensitivity depending on the WT and battery ratings and the level of support required from them [54]. This would help reduce the mechanical stress on the WTs, improving battery life and reduce the need for conventional spinning reserves.
5. Conclusions
A control scheme for the hybrid system was developed up to allow both a WT and a battery to provide frequency regulation support. This prevents the battery from responding to every fluctuation in frequency. The battery clearly is more sensitive to frequency variations than the inertia and droop control. However, very high sensitivity would affect the battery’s health over long period of time. In contrast, reduced BESS sensitivity prevents proper frequency support, and the synchronous machines have to provide the inertia. An oversized BESS would lead to higher costs, but an undersized one would not be able to provide adequate response. Therefore, the BESS needs to be properly sized to provide the power needed in cases of frequency drop. For the wind turbine control, far less sensitive inertia and droop control is not sufficient, as the frequency drop is larger. However, highly sensitive inertia and droop control may cause a second frequency drop, thereby increasing the time for frequency stabilization or even further destabilizing the grid. We conclude that a battery may be deployed along with inertia and droop control for maximum support, but sizing and response sensitivity would be key to utilizing the battery efficiently. Depending on the control, additional synchronous machines may not be needed to provide inertia support in the event of a frequency drop.
Author Contributions
Conceptualization, A.P. and J.L.D.-G.; methodology, A.P. and J.L.D.-G.; formal analysis, A.P.; writing—original draft preparation, A.P.; writing—review and editing, J.L.D.-G. and P.G.-R.; funding acquisition, P.G.-R. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by H2020-MSCA-COFUND-2016 (DOC-FAM, Grant Agreement No. 754397).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ratnam, K.S.; Palanisamy, K.; Yang, G. Future low-inertia power systems: Requirements, issues, and solutions—A review. Renew. Sustain. Energy Rev. 2020, 124, 109773. [Google Scholar] [CrossRef]
- Europe Faces Gas Supply Disruption after Russia Imposes Sanctions. Al Jazeera 2022. Available online: https://www.aljazeera.com/news/2022/5/12/europes-gas-supply-crisis-grows-after-russia-imposes-sanctions (accessed on 12 May 2022).
- Denholm, P.; Mai, T.; Kenyon, R.W.; Kroposki, B.; O’Malley, M. Inertia and the Power Grid: A Guide Without the Spin; Technical Report NREL/TP-6A20-73856; National Renewable Energy Laboratory: Golden, CO, USA, 2020.
- Wu, Z.; Gao, W.; Wang, J.; Gu, S. A coordinated primary frequency regulation from Permanent Magnet Synchronous Wind Turbine Generation. In Proceedings of the 2012 IEEE Power Electronics and Machines in Wind Applications, Denver, CO, USA, 16–18 July 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Attya, A.; Dominguez-Garcia, J.; Anaya-Lara, O. A review on frequency support provision by wind power plants: Current and future challenges. Renew. Sustain. Energy Rev. 2018, 81, 2071–2087. [Google Scholar] [CrossRef]
- Fernández-Guillamón, A.; Gómez-Lázaro, E.; Muljadi, E.; Ángel Molina-García. Power systems with high renewable energy sources: A review of inertia and frequency control strategies over time. Renew. Sustain. Energy Rev. 2019, 115, 109369. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, W.; Gao, T.; Yan, W.; Zhang, H.; Yan, S.; Wang, X. State-of-the-art review on frequency response of wind power plants in power systems. J. Mod. Power Syst. Clean Energy 2018. [Google Scholar] [CrossRef]
- Conroy, J.F.; Watson, R. Frequency Response Capability of Full Converter Wind Turbine Generators in Comparison to Conventional Generation. IEEE Trans. Power Syst. 2008, 23, 649–656. [Google Scholar] [CrossRef]
- Akram, U.; Nadarajah, M.; Shah, R.; Milano, F. A review on rapid responsive energy storage technologies for frequency regulation in modern power systems. Renew. Sustain. Energy Rev. 2020, 120, 109626. [Google Scholar] [CrossRef]
- Díaz-González, F.; Hau, M.; Sumper, A.; Gomis-Bellmunt, O. Participation of wind power plants in system frequency control: Review of grid code requirements and control methods. Renew. Sustain. Energy Rev. 2014, 34, 551–564. [Google Scholar] [CrossRef]
- Gonzalez-Longatt, F.M. Effects of the synthetic inertia from wind power on the total system inertia: Simulation study. In Proceedings of the 2012 2nd International Symposium On Environment Friendly Energies And Applications, Newcastle Upon Tyne, UK, 25–27 June 2012; pp. 389–395. [Google Scholar] [CrossRef]
- Yao, W.; Lee, K.Y. A control configuration of wind farm for load-following and frequency support by considering the inertia issue. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, Y.; Xu, L.; Zhang, X.; Li, H. Virtual inertia control of DFIG-based wind turbines for dynamic grid frequency support. In Proceedings of the IET Conference on Renewable Power Generation (RPG 2011), Edinburgh, UK, 6–8 September 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Li, P.; Hu, W.; Hu, R.; Huang, Q.; Yao, J.; Chen, Z. Strategy for wind power plant contribution to frequency control under variable wind speed. Renew. Energy 2019, 130, 1226–1236. [Google Scholar] [CrossRef]
- de Almeida, R.G.; Pecas Lopes, J.A. Participation of Doubly Fed Induction Wind Generators in System Frequency Regulation. IEEE Trans. Power Syst. 2007, 22, 944–950. [Google Scholar] [CrossRef]
- Wu, Y.K.; Yang, W.H.; Hu, Y.L.; Dzung, P.Q. Frequency Regulation at a Wind Farm Using Time-Varying Inertia and Droop Controls. IEEE Trans. Ind. Appl. 2019, 55, 213–224. [Google Scholar] [CrossRef]
- Mauricio, J.M.; Marano, A.; Gomez-Exposito, A.; Martinez Ramos, J.L. Frequency Regulation Contribution Through Variable-Speed Wind Energy Conversion Systems. IEEE Trans. Power Syst. 2009, 24, 173–180. [Google Scholar] [CrossRef]
- Shao, C.; Li, Z.; Hao, R.; Qie, Z.; Xu, G.; Hu, J. A Wind Farm Frequency Control Method Based on the Frequency Regulation Ability of Wind Turbine Generators. In Proceedings of the 2020 5th Asia Conference on Power and Electrical Engineering (ACPEE), Chengdu, China, 4–7 June 2020; pp. 592–596. [Google Scholar] [CrossRef]
- Hu, Y.L.; Wu, Y.K. Inertial Response Identification Algorithm for the Development of Dynamic Equivalent Model of DFIG-Based Wind Power Plant. IEEE Trans. Ind. Appl. 2021, 57, 2104–2113. [Google Scholar] [CrossRef]
- Poullikkas, A. A comparative overview of large-scale battery systems for electricity storage. Renew. Sustain. Energy Rev. 2013, 27, 778–788. [Google Scholar] [CrossRef]
- Hesse, H.C.; Schimpe, M.; Kucevic, D.; Jossen, A. Lithium-Ion Battery Storage for the Grid—A Review of Stationary Battery Storage System Design Tailored for Applications in Modern Power Grids. Energies 2017, 10, 2107. [Google Scholar] [CrossRef]
- Palizban, O.; Kauhaniemi, K. Energy storage systems in modern grids—Matrix of technologies and applications. J. Energy Storage 2016, 6, 248–259. [Google Scholar] [CrossRef]
- Behnam Zakeri, S.S. Electrical energy storage systems: A comparative life cycle cost analysis. Renew. Sustain. Energy Rev. 2015, 42, 569–596. [Google Scholar] [CrossRef]
- Dang, J.; Seuss, J.; Suneja, L.; Harley, R.G. SOC feedback control for wind and ESS hybrid power system frequency regulation. In Proceedings of the 2012 IEEE Power Electronics and Machines in Wind Applications, Denver, CO, USA, 16–18 July 2012; pp. 1–7. [Google Scholar] [CrossRef]
- Li, W.; Joos, G. Comparison of Energy Storage System Technologies and Configurations in a Wind Farm. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 1280–1285. [Google Scholar] [CrossRef]
- Sun, J.; Sheng, L.; Sun, Y.; Zhou, Z.; Fu, R. Stability Simulation Analysis of a Hybrid Wind-Battery System. In Theory, Methodology, Tools and Applications for Modeling and Simulation of Complex Systems; Zhang, L., Song, X., Wu, Y., Eds.; Springer: Singapore, 2016; pp. 154–163. [Google Scholar]
- Liang, L.; Zhong, J.; Jiao, Z. Frequency Regulation for a Power System with Wind Power and Battery Energy Storage. In Proceedings of the 2012 IEEE International Conference on Power System Technology (POWERCON), Auckland, New Zealand, 30 October–2 November 2012. [Google Scholar]
- Toge, M.; Kurita, Y.; Iwamoto, S. Supplementary load frequency control with storage battery operation considering SOC under large-scale wind power penetration. In Proceedings of the 2013 IEEE Power Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Ono, T.; Arai, J. Frequency Control with Dead Band Characteristic of Battery Energy Storage System for Power System Including Large Amount of Wind Power Generation. Electr. Eng. Jpn. 2013, 185, 1–10. [Google Scholar] [CrossRef]
- Li, W.; Joos, G. A power electronic interface for a battery supercapacitor hybrid energy storage system for wind applications. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 1762–1768. [Google Scholar] [CrossRef]
- He, G.; Chen, Q.; Kang, C.; Xia, Q.; Poolla, K. Cooperation of Wind Power and Battery Storage to Provide Frequency Regulation in Power Markets. IEEE Trans. Power Syst. 2017, 32, 3559–3568. [Google Scholar] [CrossRef]
- Singarao, V.Y.; Nimmagadda, S.; Rao, V. Economic Comparison of Deloaded-Wind and Wind-Battery Systems. In Proceedings of the 2014 Sixth Annual IEEE Green Technologies Conference, Corpus Christi, TX, USA, 3–4 April 2014; pp. 126–131. [Google Scholar] [CrossRef]
- Tan, J.; Zhang, Y. Coordinated Control Strategy of a Battery Energy Storage System to Support a Wind Power Plant Providing Multi-Timescale Frequency Ancillary Services. IEEE Trans. Sustain. Energy 2017, 8, 1140–1153. [Google Scholar] [CrossRef]
- Li, W.; Joos, G.; Belanger, J. Real-Time Simulation of a Wind Turbine Generator Coupled With a Battery Supercapacitor Energy Storage System. IEEE Trans. Ind. Electron. 2010, 57, 1137–1145. [Google Scholar] [CrossRef]
- Mendis, N.; Muttaqi, K.M.; Perera, S. Management of Battery-Supercapacitor Hybrid Energy Storage and Synchronous Condenser for Isolated Operation of PMSG Based Variable-Speed Wind Turbine Generating Systems. IEEE Trans. Smart Grid 2014, 5, 944–953. [Google Scholar] [CrossRef]
- Hajiaghasi, S.; Salemnia, A.; Hamzeh, M. Hybrid energy storage system for microgrids applications: A review. J. Energy Storage 2019, 21, 543–570. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. On the Inertia of Future More-Electronics Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2130–2146. [Google Scholar] [CrossRef]
- Tani, A.; Camara, M.B.; Dakyo, B. Energy Management in the Decentralized Generation Systems Based on Renewable Energy—Ultracapacitors and Battery to Compensate the Wind/Load Power Fluctuations. IEEE Trans. Ind. Appl. 2015, 51, 1817–1827. [Google Scholar] [CrossRef]
- Fang, J.; Tang, Y.; Li, H.; Li, X. A Battery/Ultracapacitor Hybrid Energy Storage System for Implementing the Power Management of Virtual Synchronous Generators. IEEE Trans. Power Electron. 2018, 33, 2820–2824. [Google Scholar] [CrossRef]
- Zhang, S.; Mishra, Y.; Shahidehpour, M. Fuzzy-Logic Based Frequency Controller for Wind Farms Augmented With Energy Storage Systems. IEEE Trans. Power Syst. 2016, 31, 1595–1603. [Google Scholar] [CrossRef]
- Mohammad Dreidy, H. Mokhlis, S.M. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Zhan, S.; Hou, P.; Enevoldsen, P.; Yang, G.; Zhu, J.; Eichman, J.; Jacobson, M.Z. Co-optimized trading of hybrid wind power plant with retired EV batteries in energy and reserve markets under uncertainties. Int. J. Electr. Power Energy Syst. 2020, 117, 105631. [Google Scholar] [CrossRef]
- Atieh, A.; Charfi, S.; Chaabene, M. Chapter 8—Hybrid PV/Batteries Bank/Diesel Generator Solar-Renewable Energy System Design, Energy Management, and Economics. In Advances in Renewable Energies and Power Technologies; Yahyaoui, I., Ed.; Elsevier: Amsterdam, The Netherlands, 2018; pp. 257–294. [Google Scholar] [CrossRef]
- Luo, X.; Wang, J.; Dooner, M.; Clarke, J. Overview of current development in electrical energy storage technologies and the application potential in power system operation. Appl. Energy 2015, 137, 511–536. [Google Scholar] [CrossRef]
- Han, X.; Ouyang, M.; Lu, L.; Li, J.; Zheng, Y.; Li, Z. A comparative study of commercial lithium ion battery cycle life in electrical vehicle: Aging mechanism identification. J. Power Sources 2014, 251, 38–54. [Google Scholar] [CrossRef]
- Zhang, S.S. The effect of the charging protocol on the cycle life of a Li-ion battery. J. Power Sources 2006, 161, 1385–1391. [Google Scholar] [CrossRef]
- Zhang, N.; Yang, N.C.; Liu, J.H. Optimal Sizing of PV/Wind/Battery Hybrid Microgrids Considering Lifetime of Battery Banks. Energies 2021, 14, 6655. [Google Scholar] [CrossRef]
- Stroe, D.I.; Świerczyński, M.; Stan, A.I.; Teodorescu, R.; Andreasen, S.J. Accelerated Lifetime Testing Methodology for Lifetime Estimation of Lithium-Ion Batteries Used in Augmented Wind Power Plants. IEEE Trans. Ind. Appl. 2014, 50, 4006–4017. [Google Scholar] [CrossRef]
- Bouchhima, N.; Gossen, M.; Schulte, S.; Birke, K.P. Lifetime of self-reconfigurable batteries compared with conventional batteries. J. Energy Storage 2018, 15, 400–407. [Google Scholar] [CrossRef]
- Alramlawi, M.; Gabash, A.; Mohagheghi, E.; Li, P. Optimal operation of hybrid PV-battery system considering grid scheduled blackouts and battery lifetime. Sol. Energy 2018, 161, 125–137. [Google Scholar] [CrossRef]
- Hou, Z.; Zhang, L.; Chen, J.; Xiong, Y.; Zhang, X.; Qian, Y. An aqueous rechargeable lithium ion battery with long cycle life and overcharge self-protection. Mater. Chem. Front. 2021, 5, 2749–2757. [Google Scholar] [CrossRef]
- Chen, H.; Cong, T.N.; Yang, W.; Tan, C.; Li, Y.; Ding, Y. Progress in electrical energy storage system: A critical review. Prog. Nat. Sci. 2009, 19, 291–312. [Google Scholar] [CrossRef]
- Xiong, R.; Chen, H.; Wang, C.; Sun, F. Towards a smarter hybrid energy storage system based on battery and ultracapacitor—A critical review on topology and energy management. J. Clean. Prod. 2018, 202, 1228–1240. [Google Scholar] [CrossRef]
- Wind Energy and On-Site Energy Storage. Exploring Market Opportunities; Technical Report; Wind Europe: Brussels, Belgium, 2017.









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).