Einstein’s Elevator: World Lines, Michelson–Morley Experiment and Relativistic Paradox


Independent Researcher, Boudiguen, 29310 Querrien, France
Physics 2022, 4(3), 892-911; https://doi.org/10.3390/physics4030058
Submission received: 26 May 2022
/
Revised: 25 July 2022
/
Accepted: 29 July 2022
/
Published: 11 August 2022
(This article belongs to the Section Classical Physics)
Abstract
:We all have in mind Einstein’s famous thought experiment in the elevator where we observe the free fall of a body, and then the trajectory of a light ray. Here, in addition to the qualitative aspect, the exact calculations are carried out, and the worldlines equations are given. A uniformly accelerated reference frame in rectilinear translation is considered, and it is shown that the trajectories of the particles are semi-ellipses with the center on the event horizon. The frame of reference is non-inertial, the spacetime is flat, and the computations are performed within the framework of special relativity. Some experimental consequences are discussed, especially the experiment with the accelerated Michelson–Morley interferometer is solved, and an experiment, where a new relativistic paradox appears—a particle of matter seems to go faster than light—is described. The differences, compared to the classical case, are important at a large scale and close to the horizon, but they are small in the lift where the interest is above all theoretical. The concepts of metric, coordinated velocity and horizon are discussed, and an analogy with the black hole is made.
Keywords:
uniformly accelerating; worldline; circle; synchronization; Michelson; interferometer; paradox1. Introduction
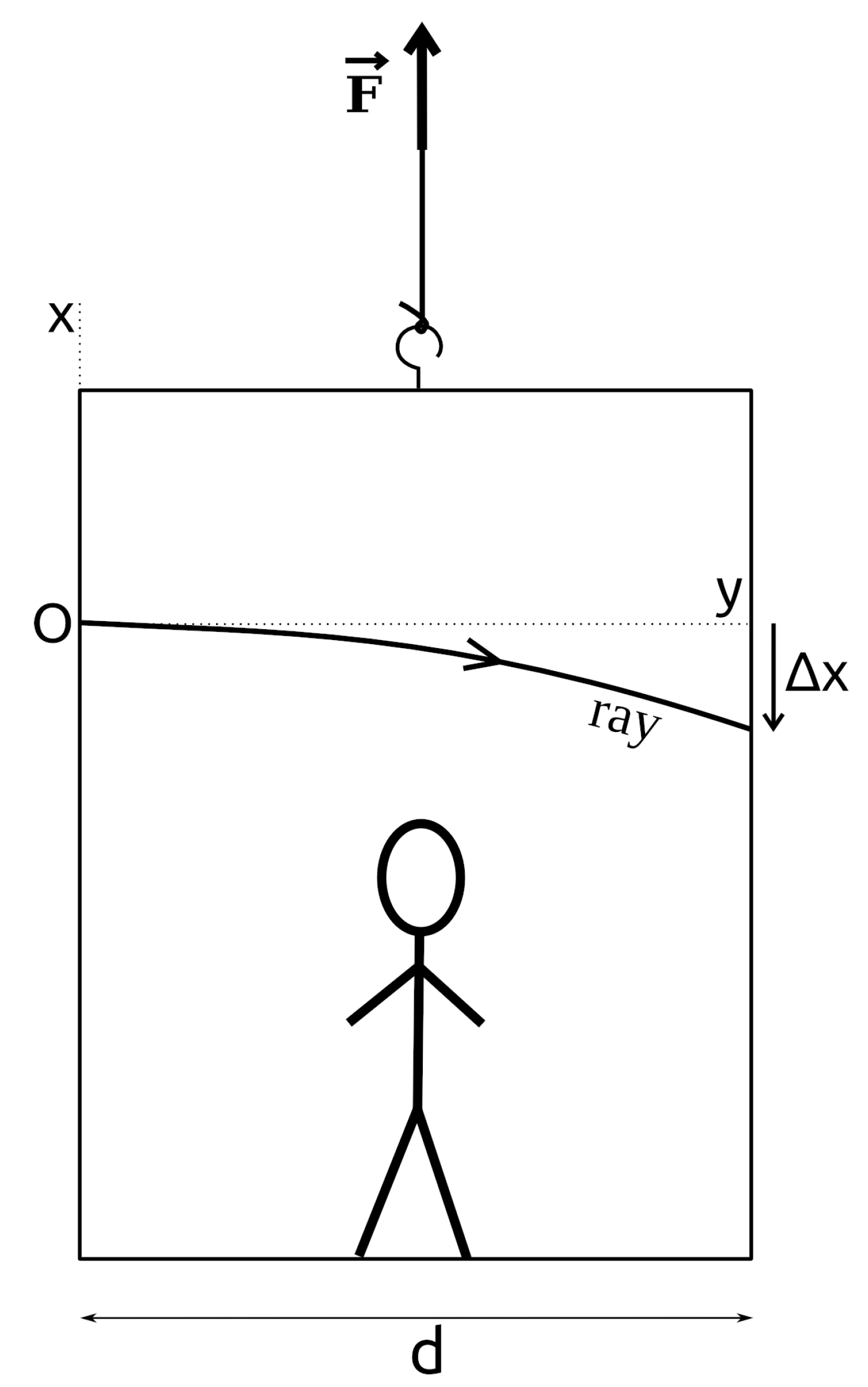
Let us imagine a portion of empty space infinitely distant from all masses and a large box, in which an observer floats in weightlessness. With the help of a hook and a rope, a constant force is exerted on the box, thus animated by a rectilinear translation motion uniformly accelerated. The observer then experiences an artificial gravity (Figure 1). Here, a study in the reference frame of the elevator the motion of light, then of a massive particle, and, finally, make a comparison with the black hole during a free fall from rest is carried out. In the frame of the box, first inertial, a light beam propagates at speed c along a straight line trajectory. Then, the box is accelerated and a ray, initially perpendicular to the direction of motion, follows a curved trajectory. Let us quote Albert Einstein in his Relativity book [1]: “It can easily be shown that the path of the same ray of light is no longer a straight line”.
Following the birth of special relativity in 1905, the accelerated elevator thought experiment, proposed by Einstein as early as in 1908, allowed us to draw the analogy with gravity, to develop an intuition and to guide the foundation of general relativity. New theory of gravitation established in 1915 which then supplanted Newton’s theory. This image was used to illustrate the principle of equivalence, and to predict the deviation of light rays by a massive star.
Nevertheless, the historical development of the theory should not derail attention from a fundamental point: the deviation of a light ray in the accelerated elevator is fully explained with the special theory of relativity. Indeed, in the accelerating reference frame of the elevator, spacetime remains flat; no gravitational field here, and the deviation of light rays is understood by just a kinematic reasoning.
According to Einstein’s second postulate, the speed of light in vacuum has the same value c in all inertial frames of reference. A logical consequence of this postulate: in a non-inertial frame the speed of light can, a priori, be different than c. (It remains, of course, that an object can in no case exceed the speed of light in vacuum, and that the speed of light for a local Minkowskian observer is always equal to c.) Another property: a free particle follows a rectilinear and uniform trajectory in an inertial frame. Therefore, a free particle can follow a curved trajectory in a non-inertial frame. As shown, this is precisely what happens here for the ray of light.
2. Uniformly Accelerated Reference Frame
2.1. Coordinate System
We want to describe physics from the point of view of the observer with a constant proper acceleration. A reference frame is a physical entity, to which we associate a coordinate system for localization. Let us start by using the description of Desloge and Philpott [2]. A uniformly accelerated reference frame, R, is defined as a set of observers who remain at rest with respect to each other in a hypothetical rigid three-dimensional structure. Let us imagine a continuous set of infinitesimal observers each equipped with a ruler and a clock. An event is uniquely specified with the observer on whose world-line the event occurs. To define the coordinate system, we decide to assign a set of three numbers to each observer, and a number t to each point of their worldline. A reference frame with an associated coordinate system provides a system of reference. A reference system is called “rigid” if the distance measured with standard rulers at rest between two reference points is constant in time [3]. For an inertial frame, , all the clocks can be synchronized, and t corresponds to the proper time of each observer at rest in . For a non-inertial frame, this is no longer possible and each observer has a second clock called “coordinate clock”. However, the uniformly accelerated frame is still rigid, because the relationships between the observers remain unchanged. Let us choose an observer O of R used as reference: , and in his particular case the proper and coordinate times remain equal. Desloge and Philpott then make a one dimensional study, in this paper, the study is extended to the three spatial dimensions using an accelerometer. By shifting the ruler as much as necessary in the directions of the proper acceleration, given by an accelerometer, an x is assigned to each observer X. We proceed in the same way in two orthogonal directions for y and z. x is the vertical upward direction, and y and z the lateral directions.
To synchronize all the coordinate clocks, the radar method is used. O emits a periodic light signal, and each of the other observers X equals the rate of his coordinate clock with the signal received from O. O sends a signal at reflected by X, and back to O at (Figure 2). When the signal is reflected by X, the time is assigned to his coordinate clock. A coordinate clock can be compared to a clock radio-controlled by O’s proper clock. One can also synchronize clocks located in the same horizontal plane of R (the protocol is described in Section 3.3). There is invariance under translation along y and z, and, in this case, the proper clocks are sufficient because the rhythm of the clocks is the same for a given x.
Let us remind the definition of Landau and Lifchitz [5] for a reference system, where the clocks can be synchronized over all space, called a “synchronous reference system”: a reference frame, described by a metric , where the components, with one temporal index and the other spatial, are zeros, is synchronous. As one can see in the following Section 2.2, this is the case of the uniformly accelerated reference frame: with i = 1, 2 or 3.
The coordinate system has been built intrinsically with the non-inertial observers. To define a constant proper acceleration for O in an inertial frame , is considered coinciding instantaneously with R, and then it is easy to demonstrate that the proper acceleration, , is momentarily equal to the acceleration of with respect to R. At this instant , all clocks of and coinciding are set to zero. If later at t, a second inertial frame coincides with R, the set of coordinate clocks of R will still be synchronized, and one will be able to equalize their dates with a set of synchronized proper clocks of , however, the set of proper clocks of R will no longer be synchronized, especially at large x.
Let us recall how to measure the velocity and acceleration of a particle. When a particle passes close to an observer, the observer needs the collaboration of other neighboring observers; they can use one or the other of their clocks—coordinate velocity and acceleration, and , respectively, or local, and . In an inertial reference frame, the speed of light is constant: distances can be measured equally with a ruler or a radar. In a non-inertial frame, the coordinate velocity of light varies: distances measured by each method are generally different [6].
2.2. Metric and Change of Coordinates
In this Subsection, the reader is reminded of the known expressions and some notations are introduced. In a non-inertial frame of reference, the metric is non-Minkowskian. The spacetime metric of an observer with a constant proper acceleration is considered. The accelerated frame R is in rectilinear translation with respect to inertial. Here, the Rindler coordinate system [4] is used and we give the metric for a particle and a constant proper acceleration, , with the unit vector along the upward vertical x-direction [7]:
The calculation shows that all the components of the Riemann curvature tensor are zero [8], so the spacetime is flat, and there is a global change of coordinates from R to [4]:
with , and . In , One finds back the Minkowski metric, . If the Riemann curvature tensor had a non-zero component, the spacetime would be curved, and there would be no such global change of coordinate from the non-inertial frame to an inertial one. Here, there is an underlying global Minkowskian framework.
Let us use dimensionless quantities to simplify the calculations. For distances, with the horizon distance, . For times, with the horizon time, . For an acceleration equivalent to the intensity of gravity at the earth’s surface, the horizon quantities are approximately one light-year and one year. To further illustrate our point, one can associate the reference frame to the galactic reference frame where stars are supposed to be fixed, and replace the elevator frame R by the frame of a rocket that makes an interstellar voyage. The hyperplane defines the event horizon as a break in the causal link. The astronauts will see their starting point, the Earth, moving away, then stopping at a light-year with a proper time frozen at one year.
The proper acceleration felt by an observer is inversely proportional to the horizon distance: , so the rigidity is ensured [9].
3. Rays of Light
One is now able to establish, as a new result, the equations of the world lines. Without losing in generality, let us take as initial condition a light ray that enters the elevator when it has a zero speed in the inertial reference frame. All clocks are then set to zero, and the angle of entry of the ray is the same for all observers (Figure 3). The trajectories are all located in the plane .
3.1. Lateral Rays
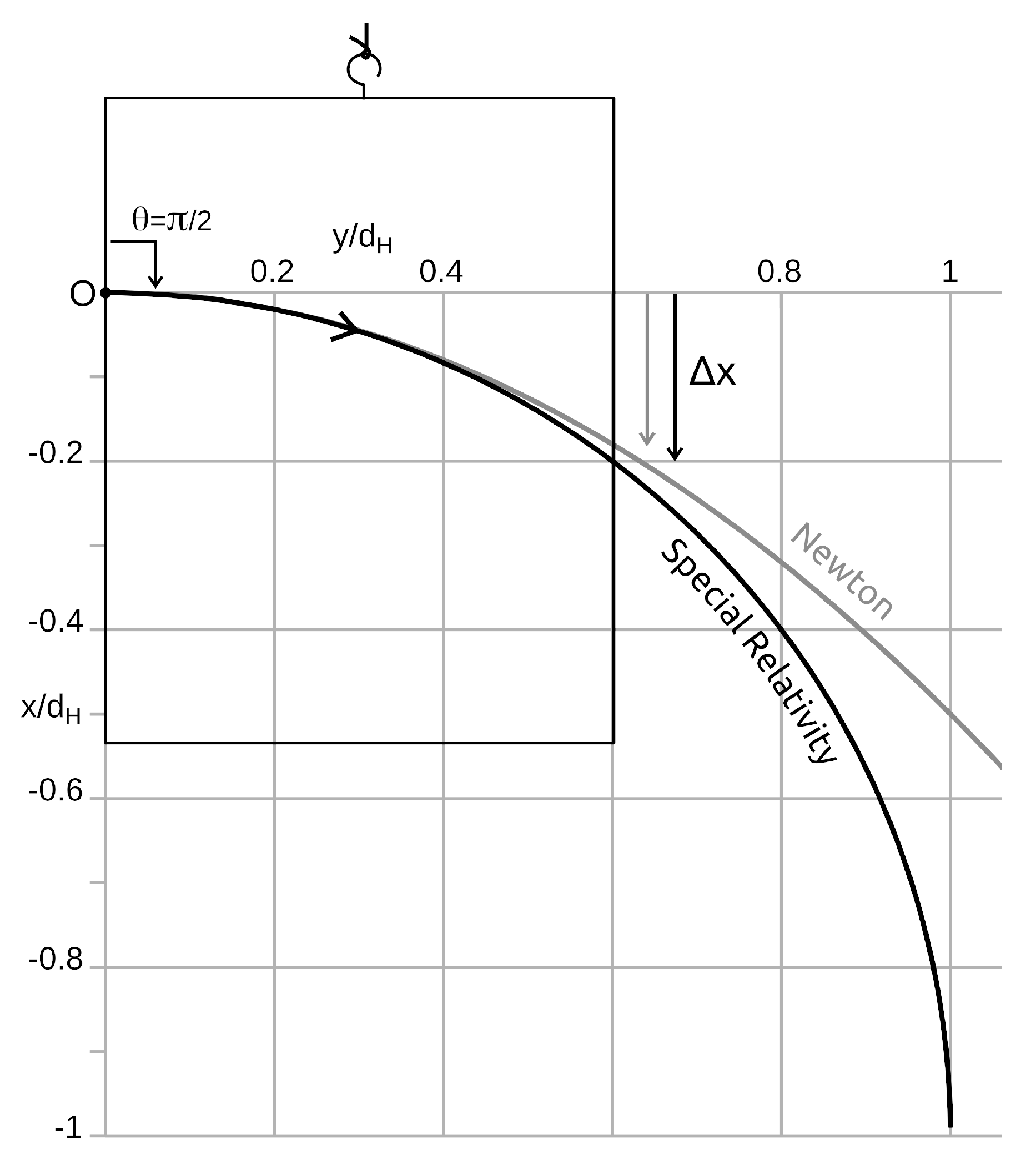
The ray of light traces a quarter circle of radius and center (Figure 4). For a light ray, , then, with and . because the coordinate system uses different physical methods of measuring distance and time: rods for x and O’s clock for t. The coordinate velocity of the light ray, initially equal to c, decreases and becomes zero on the horizon in an infinite time. As the components of the metric tensor depend on the point, the coordinate velocity corresponds to the local velocity just for the particular observer O, whereas for an inertial frame this velocity keeps the same meaning for all observers. For example, for the uniformly accelerated frame, the notion of rigidity is maintained, but, on the other hand, one can no longer define a set of proper clocks synchronized on the worldline of a particle. For the observer O, the measurements of his observers placed at different xs with their coordinate clocks tell him that everything goes slower downwards, and faster upwards. This is why, from his point of view, light goes slower at lower levels, while a lower observer measures, where he is with his proper clock, a speed of light well equal to c.
For comparison, let us give the predictions of Newton’s theory: and . In this approximation, the trajectory is parabolic and the speed of light increases towards infinity.
3.2. Any Rays
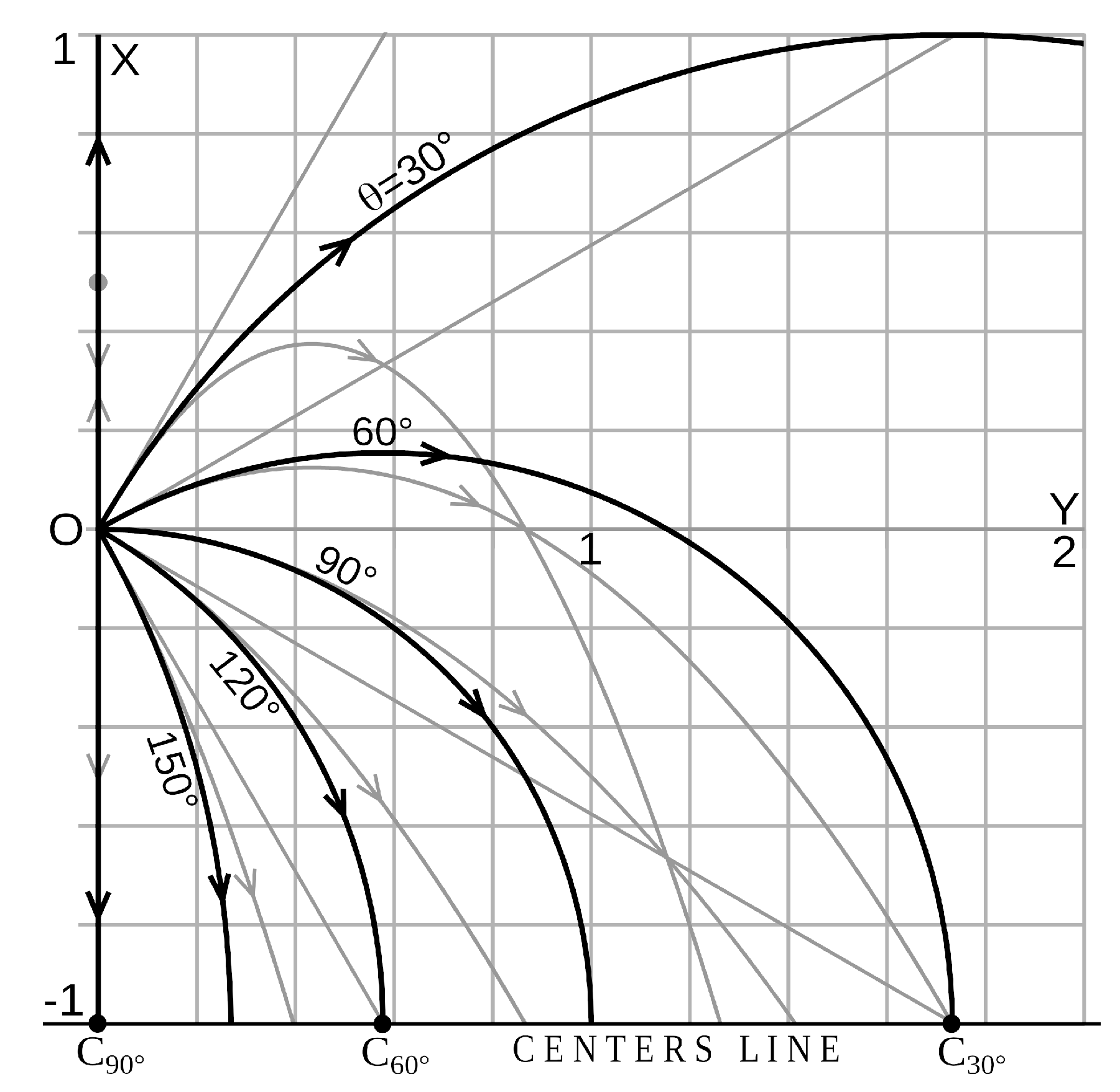
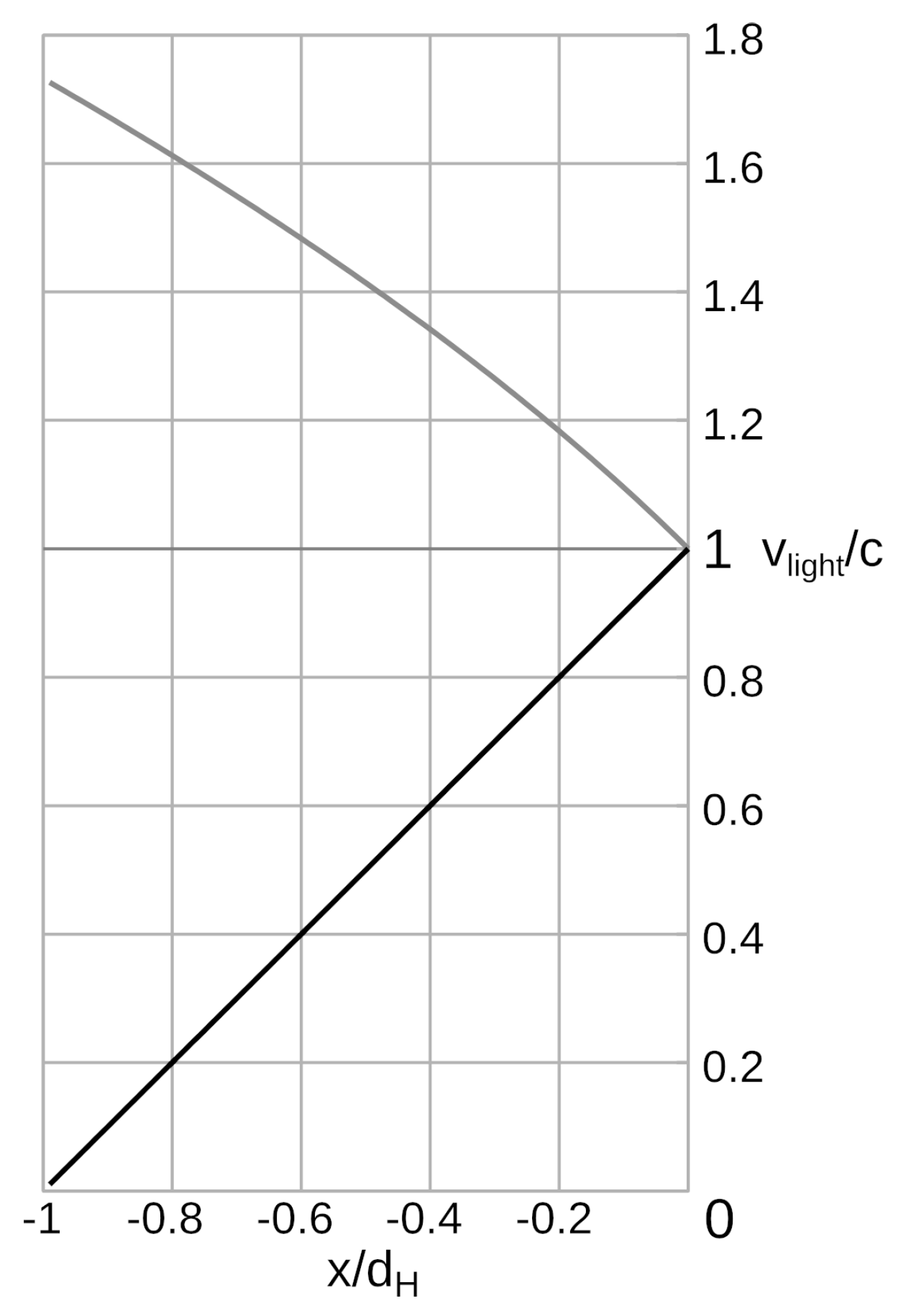
In general, the worldline of a ray in has for equations and . Then, in R, the ray of light describes a circular trajectory of radius and center (Figure 5 and Figure 6). The speed of a luminous ray, no matter the initial conditions of the trajectory, varies linearly with X. If , the ray goes faster than c; if , the speed of light becomes less than c, and tends towards zero when X tends towards (Figure 7).
Let us imagine that one places a large drawing sheet on the vertical wall of the elevator and reproduces with a pen the passage of the light rays on the sheet. Then, the drawing is detached, and, back in an inertial reference frame, it is presented to geometricians who will attest that they are indeed arcs of circles.
For vertical rays, the speed and the equations of the worldlines are:
3.3. Horizontal Synchronization
To synchronize clocks, one can use coinciding inertial reference frames, or, the radar method directly from the non-inertial reference frame. In an inertial reference frame, the light rays are straight and the speed of light is constant. In the Einstein elevator, the trajectories are circular and the speed of light varies. Nevertheless, the method is analogous and the round-trip time allows us to synchronize the clock B with the one in A. There is an angle for which the ray returns on its steps (Figure 8).
3.4. Radar Distance
In an inertial reference frame, it was equivalent to use a ruler or the radar method to measure distances. In the rocket, spatial geometry is Euclidean [6] and the use of rulers is natural; on the other hand, the radar method must be adapted. For a pair of clocks A and B in a vertical plane, there is a unique semi-circle centered on the horizon that passes through A and B, and thus a unique pair that allows us to determine the position of B with respect to A:
For two clocks at the same level, the time interval of the radar echo is no longer proportional to the distance l, but, one can nevertheless express l as a function of :
In the elevator, for m and m/s, one can continue to consider straight rays with velocity c, indeed:
Then, s, well beyond the accuracy of the best atomic clocks. To increase the distance on the scale of the solar system, one can also exchange light rays between two rockets A and B whose parallel accelerations are synchronized. Over a distance of one astronomical unit, ns for m 20 s.
4. Non-Zero Mass Particles
4.1. Trajectories and Worldlines
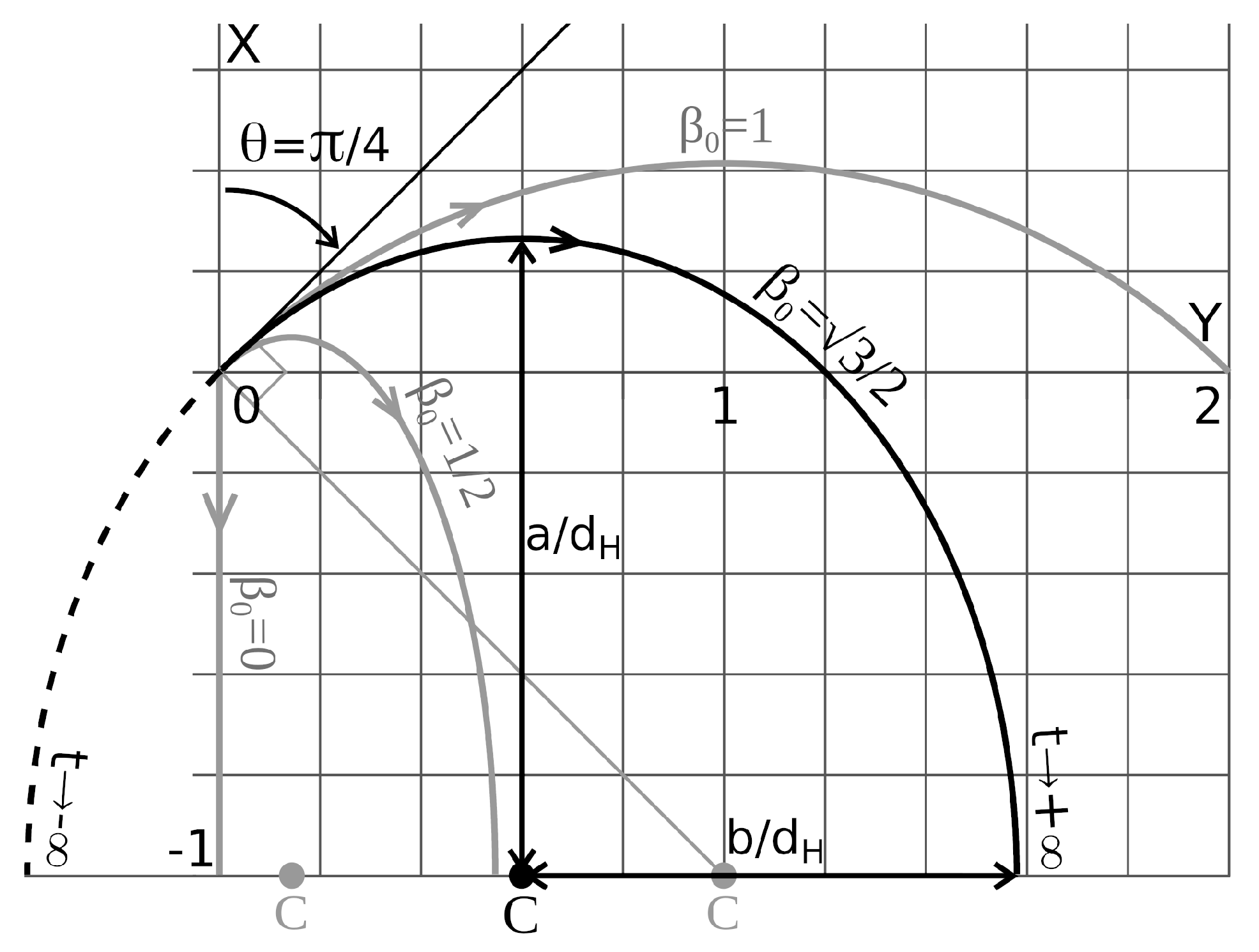
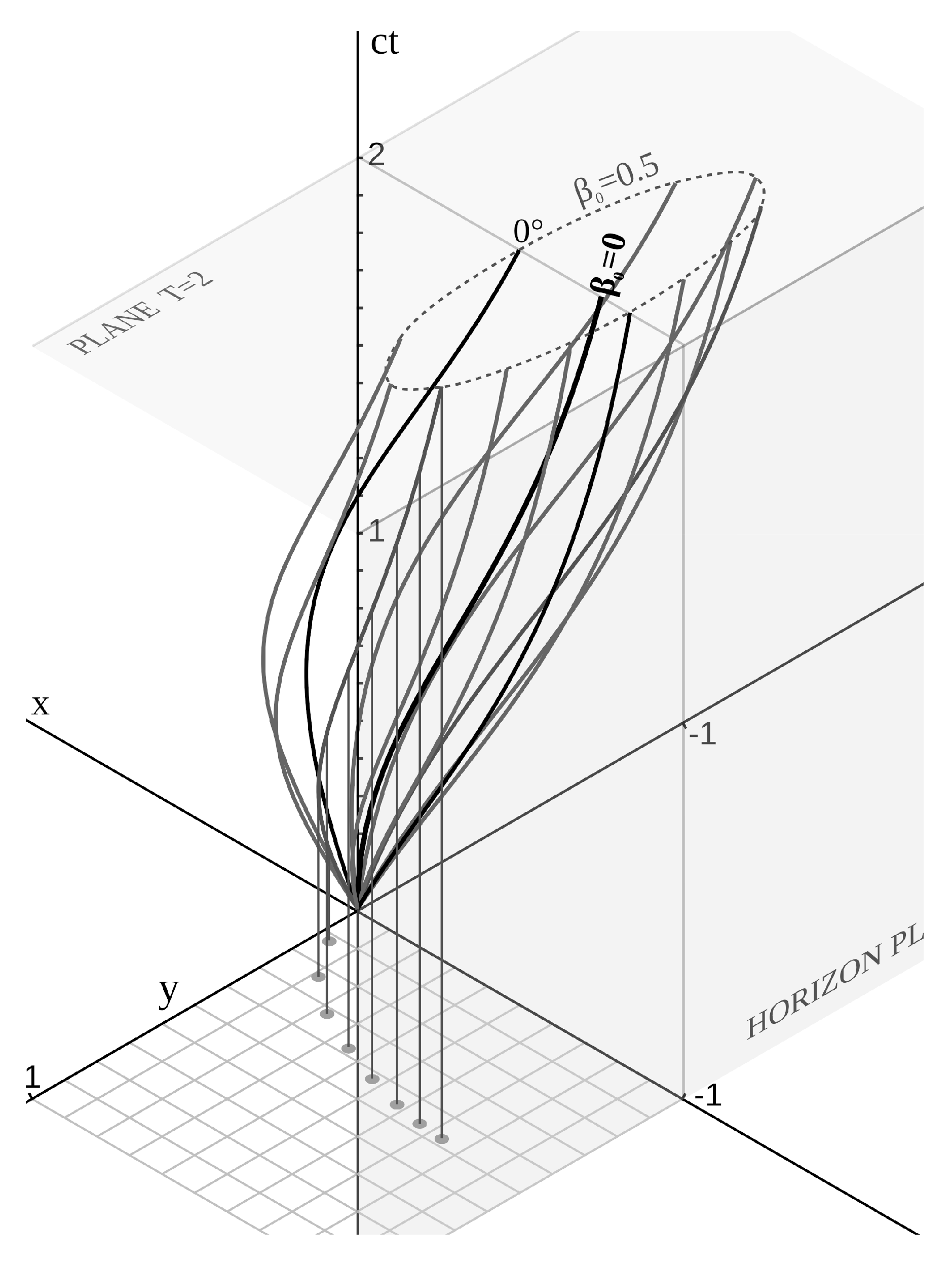
The worldline of a particle in is described by the equations, and , with the initial velocity. The calculation gives with and . The particle describes an elliptical trajectory of semi-major axis a, of semi-minor axis b and center (Figure 9 and Figure 10).
One obtains the general equations of the world lines, plotted in Figure 10:
4.2. Velocity and Acceleration for a Particle Released at Rest
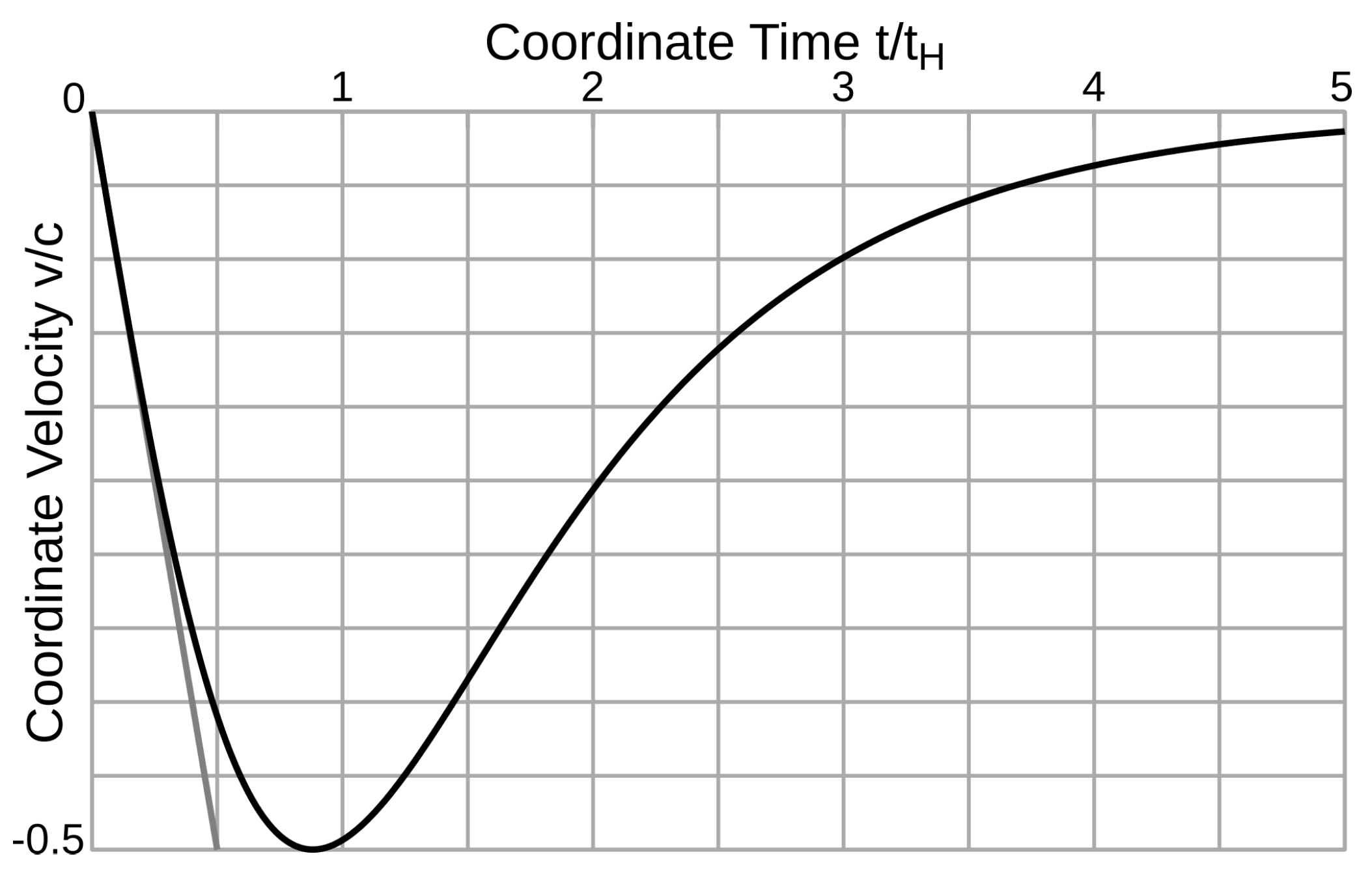
In this Subsection and in the next one, the known results are summarized for comparison with the black hole and the analogies and differences are pointed out. The initial speed of the particle is zero and the motion is vertical:
One has: at [2,10]. Initially, the speed increases, then, it decreases and tends to zero on the horizon (Figure 11). The acceleration is first negative, then, zero and becomes positive (Figure 12). The elevator observer can initially interpret the metric effects as an inertial force similar to gravitation, but then his measurements will lead him to interpret a repulsive force as the particle approaches the horizon. These are spatiotemporal perspective effects experienced by the observer of the rocket. These metric effects due to the non-inertial character of the frame of reference are sometimes described in terms of fictitious forces because the particle in inertial does not undergo any force and follows a rectilinear and uniform trajectory.
For Minkowskian observers, instantaneously at rest in successive inertial reference frames that coincide at every moment with R: then also .
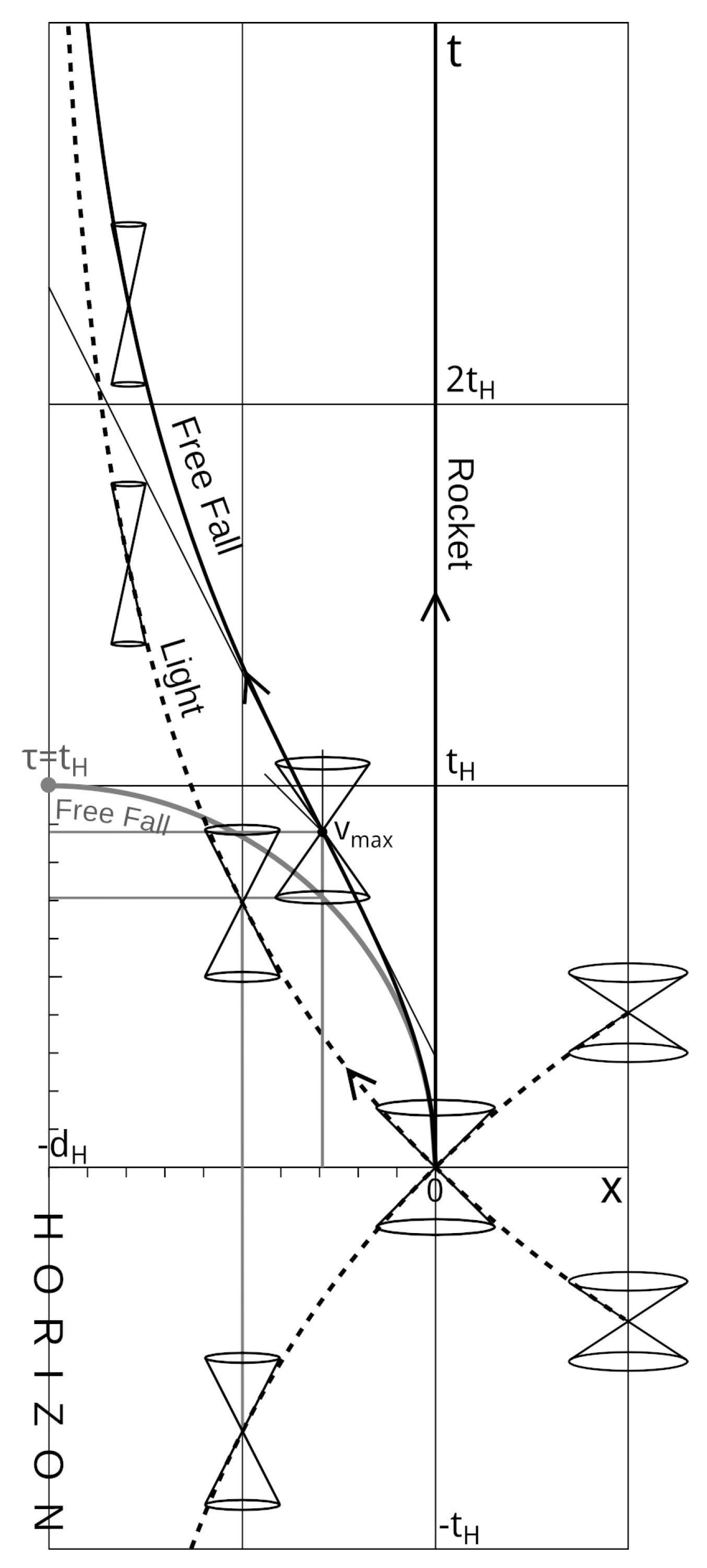
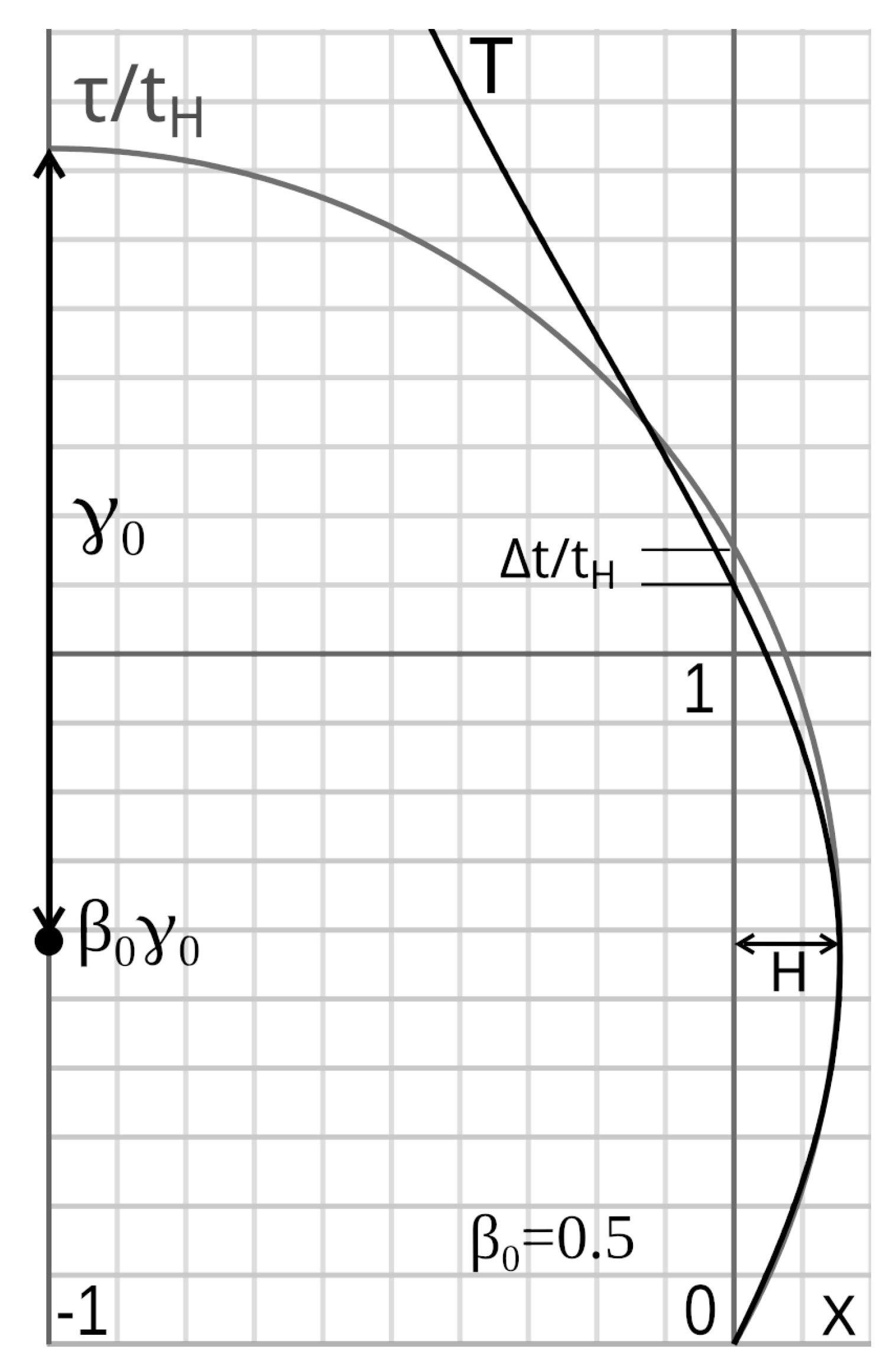
For the proper time, the metric gives . Consequently, a quarter circle is plotted in the plane . For example, as shown in Figure 13, when the falling speed is maximum, and . For the observer of the vessel at O, the time of the object in free fall freezes, and tends towards when the time of the clock at O tends towards infinity. When a free-falling observer crosses the horizon, apart from the breaking of the causal link with the vessel, nothing special happens and his proper time continues to elapse indefinitely.
4.3. Comparison with the Black Hole
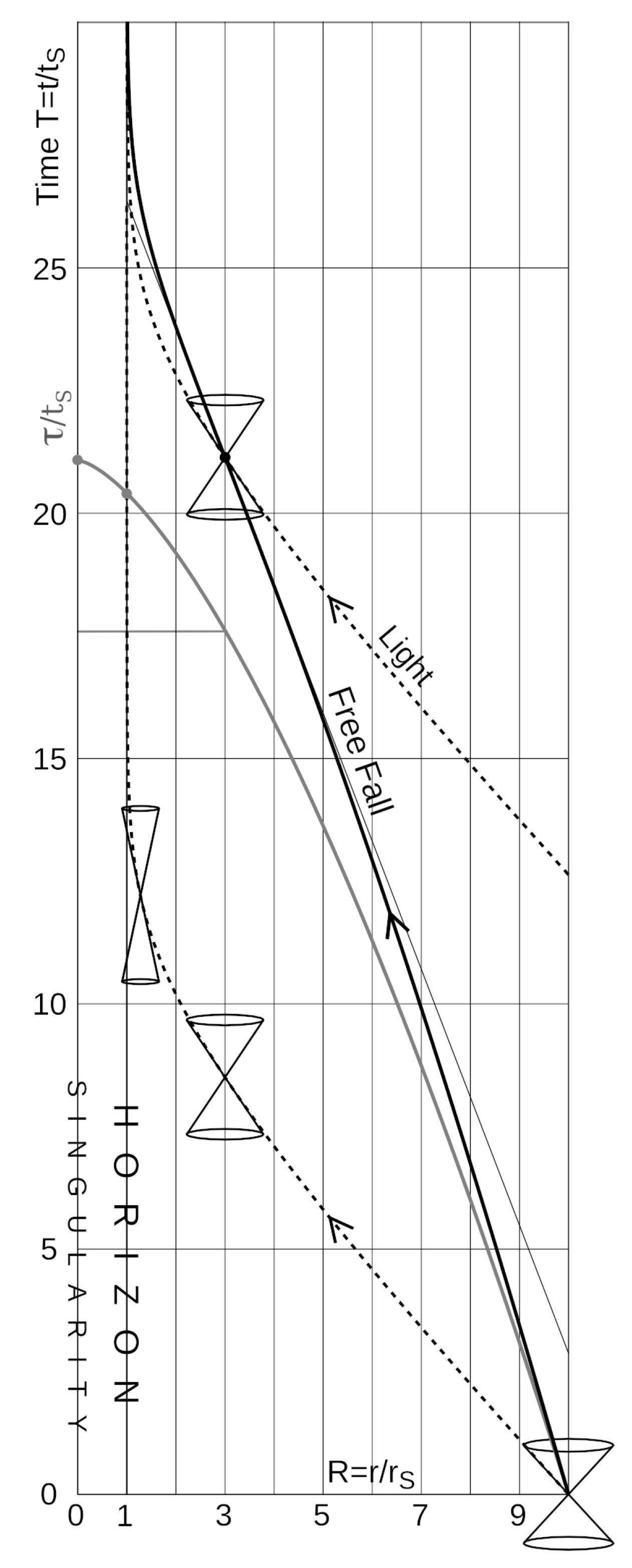
To broaden the view, let us look at another non-inertial frame of reference, R, described by the Schwarzschild metric. One has an observer at far distance from a spherical, static, and neutral star of mass M. There is also a horizon and the velocity and acceleration curves show analogies. On the other hand: spacetime is curved; there is no global change of coordinates to an underlying inertial reference frame; tidal effects will be present; free fall is no longer adiabatic because of the emission of gravitational waves; and, if the body is of non-negligible mass in front of the main star, the metric changes during the fall [11,12,13]. We use the Lagrangian approach to determine the equation of motion. The free-falling particle maximizes its proper time and follows a geodesic. We limit the study to the adiabatic radial fall of a test mass with a velocity of zero to infinity. The differential equation is then solved by a numerical approach for the plotting of the curves.
The metric and the Lagrangian () for a particle:
Here, r, G denote the radial distance from the black hole center and the universal gravitational constant, respectively.
One obtains, with , , and :
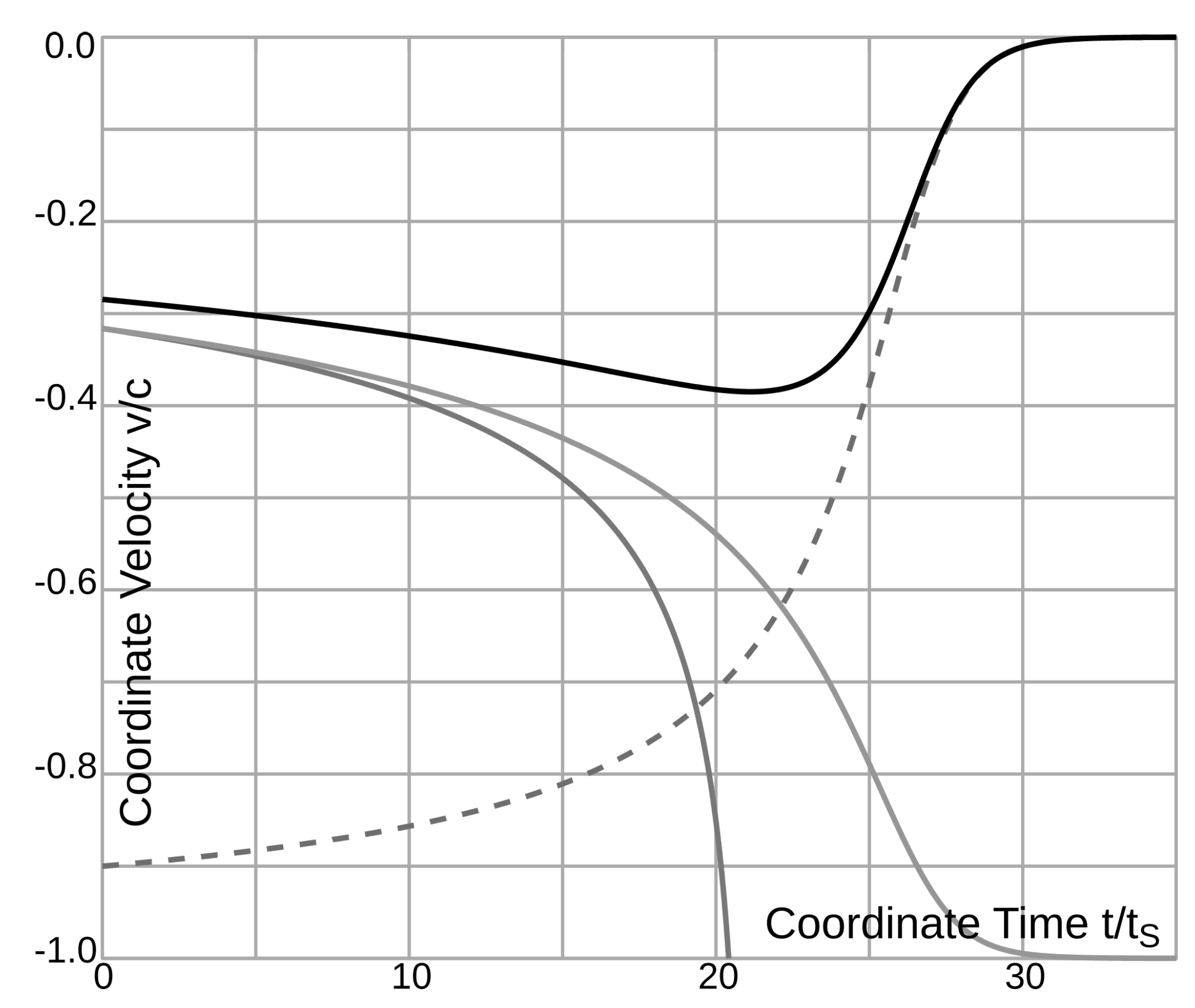
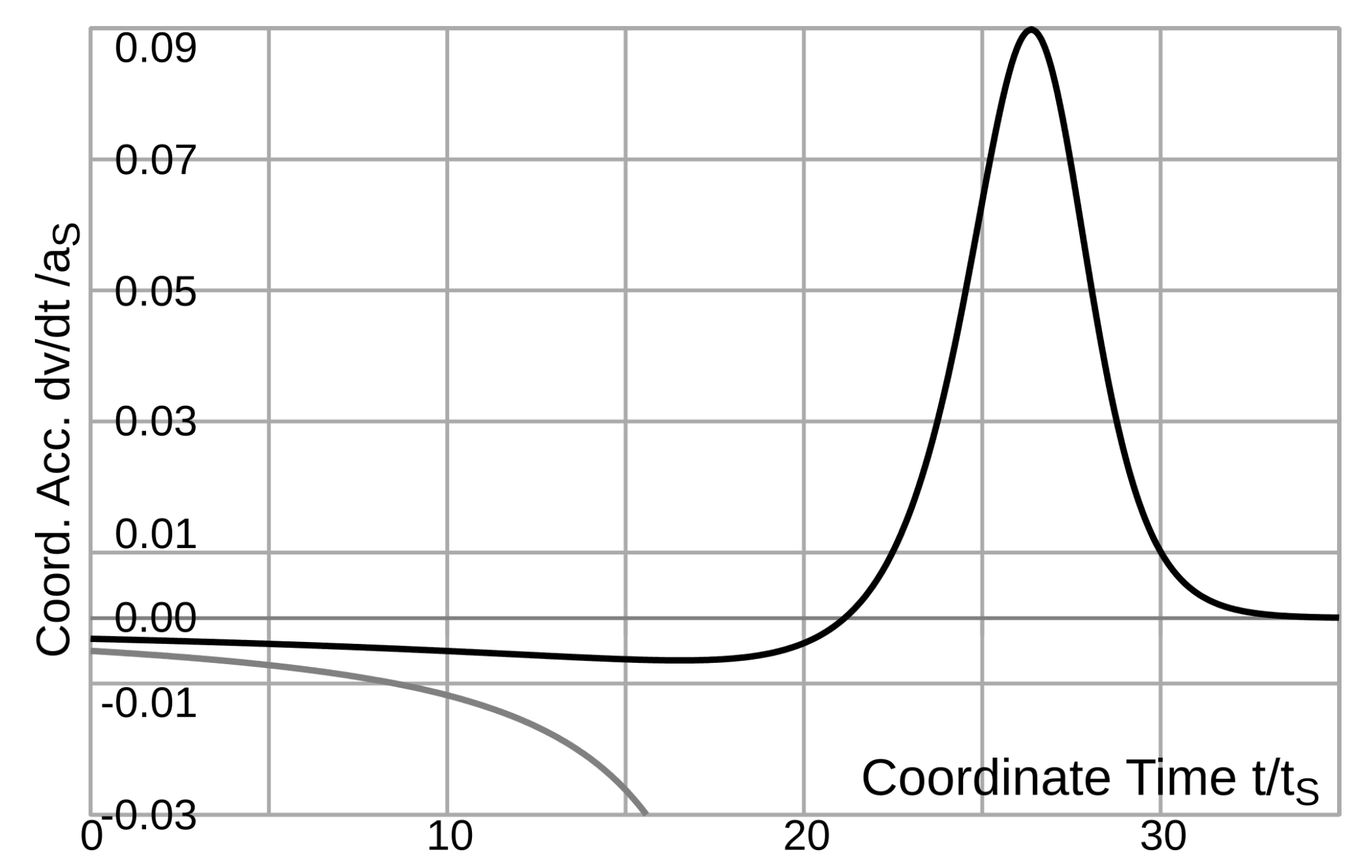
One has: at [14]. Here too, the speed reaches a maximum and the acceleration changes of sign (Figure 14 and Figure 15). The metric effects correspond to gravitation: they cannot be canceled over the whole space by a change of coordinates and are well real.
For Minkowskian observers: and then and with .
For the proper time, the metric gives . For example, as shown in Figure 16, with the initial condition, when at , when the speed of fall is maximum, and . For an observer outside the black hole, the time of the falling object freezes on the horizon when the time of his clock tends towards infinity. Whereas for the observer in free fall, a finite proper time of about elapses between the maximum speed and the crossing of the horizon, and nothing special happens during the crossing apart from the breaking of the causal link with the outside. Then, of proper time is added until the singularity, where the observer is destroyed.
5. Experimental Aspects
With the Equation (8) of the world lines, new experiments can be proposed.
5.1. Deviation Measurement
It is difficult to measure the difference experimentally. One can consider an accelerated rocket but its width, d, is too small in front of the horizon distance, , and, consequently, the observed deviation is tiny. The deviation depends on the ratio . We perform a series expansion:
The term in corresponds to the non-zero first order of the deviation due to the non-inertial character of the reference frame. The terms and beyond correspond to the deviation between classical theory and special relativity.
For m, m/s and , one gets fm for the parabolic correction of a light ray, or, for the elliptic correction of a non-zero mass particle of velocity m/s (bell shot).
The deviation is extremely small and a direct measurement seems out of reach.
5.2. Desynchronization of Clocks
On the other hand, with the precision of atomic clocks, the time deviation is experimentally accessible. For example, let us consider a clock is launched upwards with a vertical motion (Figure 17).
Let us consider a maximum height reached of m. When the moving clock falls back in free fall on its return to the level of the clock that remained at , with m/s and m/s, the time difference between the two clocks is fs for a time of flight of 6 s. For , with and , an expansion with respect to gives [8]:
5.3. Michelson Interferometer
We know the famous experiment of Michelson and Morley carried out from 1881 and that allowed the demonstration of the non-existence of the ether. The speed of light is therefore the same in all reference frames of inertia. What happens now if the experiment is performed in the accelerated reference frame?
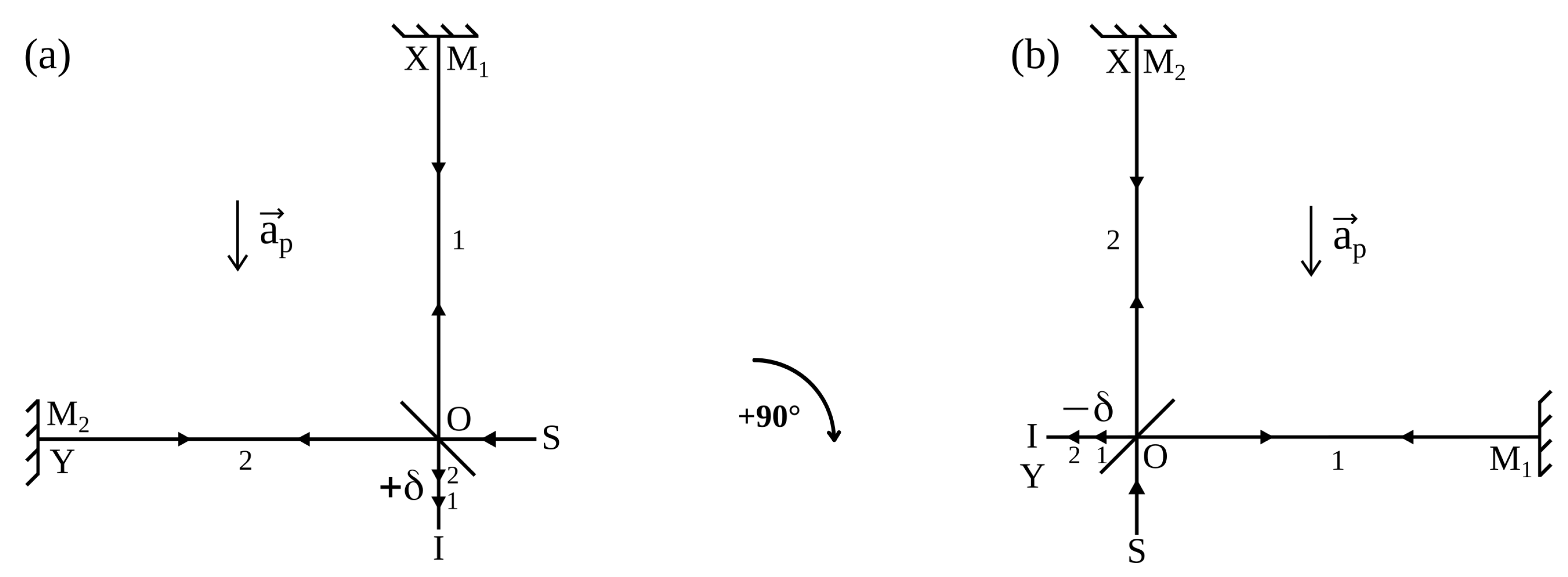
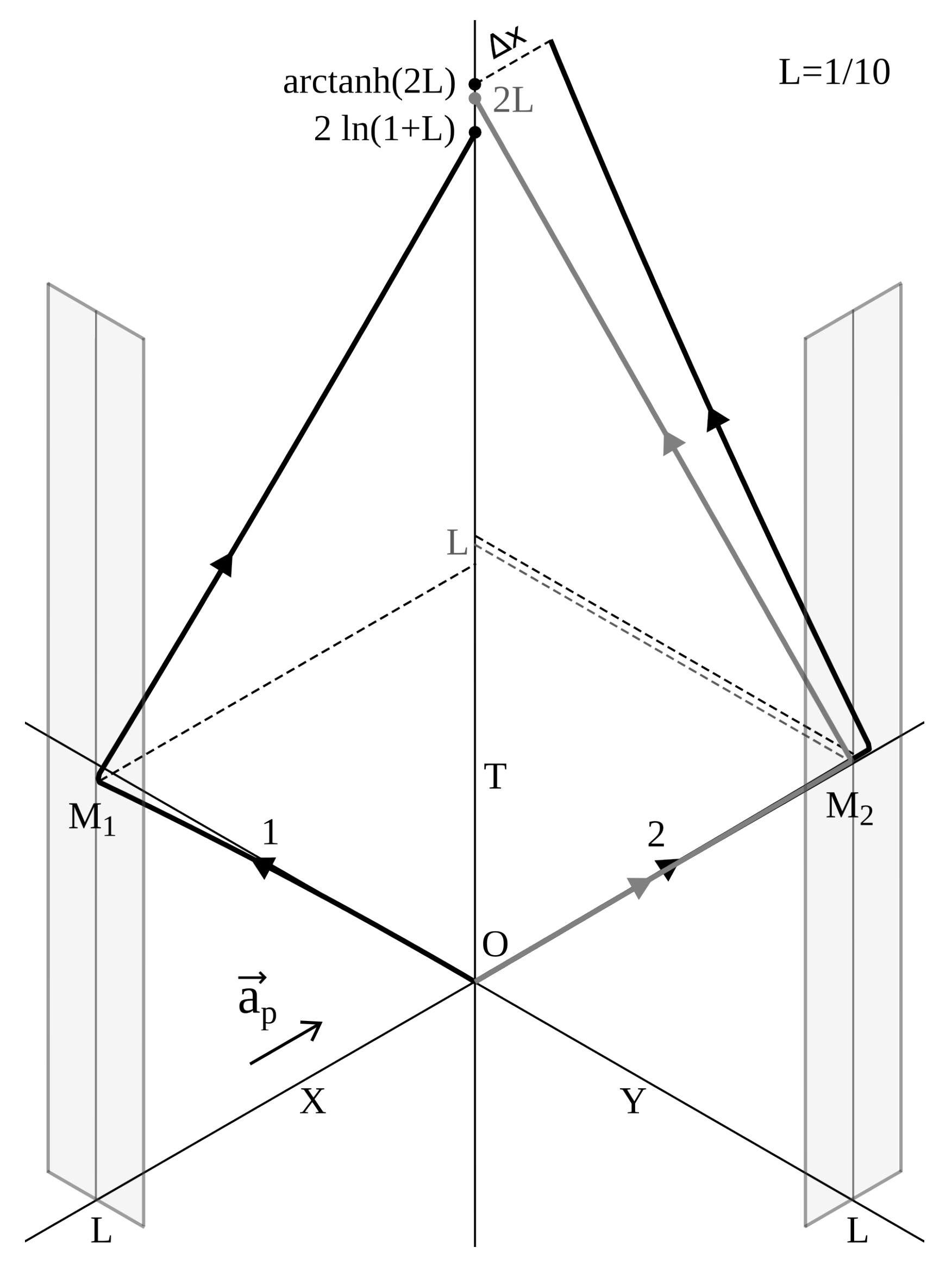
In an inertial frame, or, here, horizontally in R, the rays take the same time to go and return on each of the arms and there is no optical path difference at I (Figure 18). Let us then turn the interferometer around the axis so that arm 1 is up. As light travels faster than c for positive X, the ray 1 that goes up and returns will be back before the ray 2: according to Equation (4), for a round trip of ray 1, with . Ray 2 follows arcs of circles, but this effect produces a smaller variation and one can consider the horizontal round trip to be along a straight line: according to Equation (3), for a round trip of ray 2, the lateral circular trajectory folds on and . Let us now turn the interferometer again by but this time along the axis , as shown in Figure 18. The situation is now the opposite and it is ray 2 that arrives first. The worldlines for configuration (a) of Figure 18 are drawn in Figure 19.
We deduce the value of the difference of pathlength and the number of fringes that scroll by tilting the interferometer from configuration (a) to (b) in Figure 18:
where denote the wavelength.
For m/s, a arm length of m, and nm, the calculation gives . The variation is less than one ten millionth of a fringe. The larger and l are, and the smaller is, the more appreciable the effect will be. The spatial coherence of the interference is not lost with the vertical displacement of ray 2: fm.
The arms are also not perfectly rigid and one has to consider the mechanical constraints, exerted on the vertical arm by the proper acceleration. We model the arm by a homogeneous cylinder of density and modulus of rigidity E. According to Hooke’s law, , with the pressure exerted, and the relative deformation. The vertical arm becomes shorter and the ray will go up and return even faster. The compression, , then is calculated by integrating over the entire arm, and we deduce the difference in travel time, induced by (acceleration assumed constant along the arm):
Highly rigid, low-density materials give an optical path length difference of the order of one fringe: . The relative difference does not depend on , l or but only on the mechanical properties of the material. The metric effect is tens of million times smaller than the effect due to mechanical constraints, and it will be a complicated experimental task to isolate these effects. In a gravitational field, the same results are obtained because the spacetime curvature and tidal forces appear only at the following orders of the series expansions [8].
5.4. Three Rockets Experiment
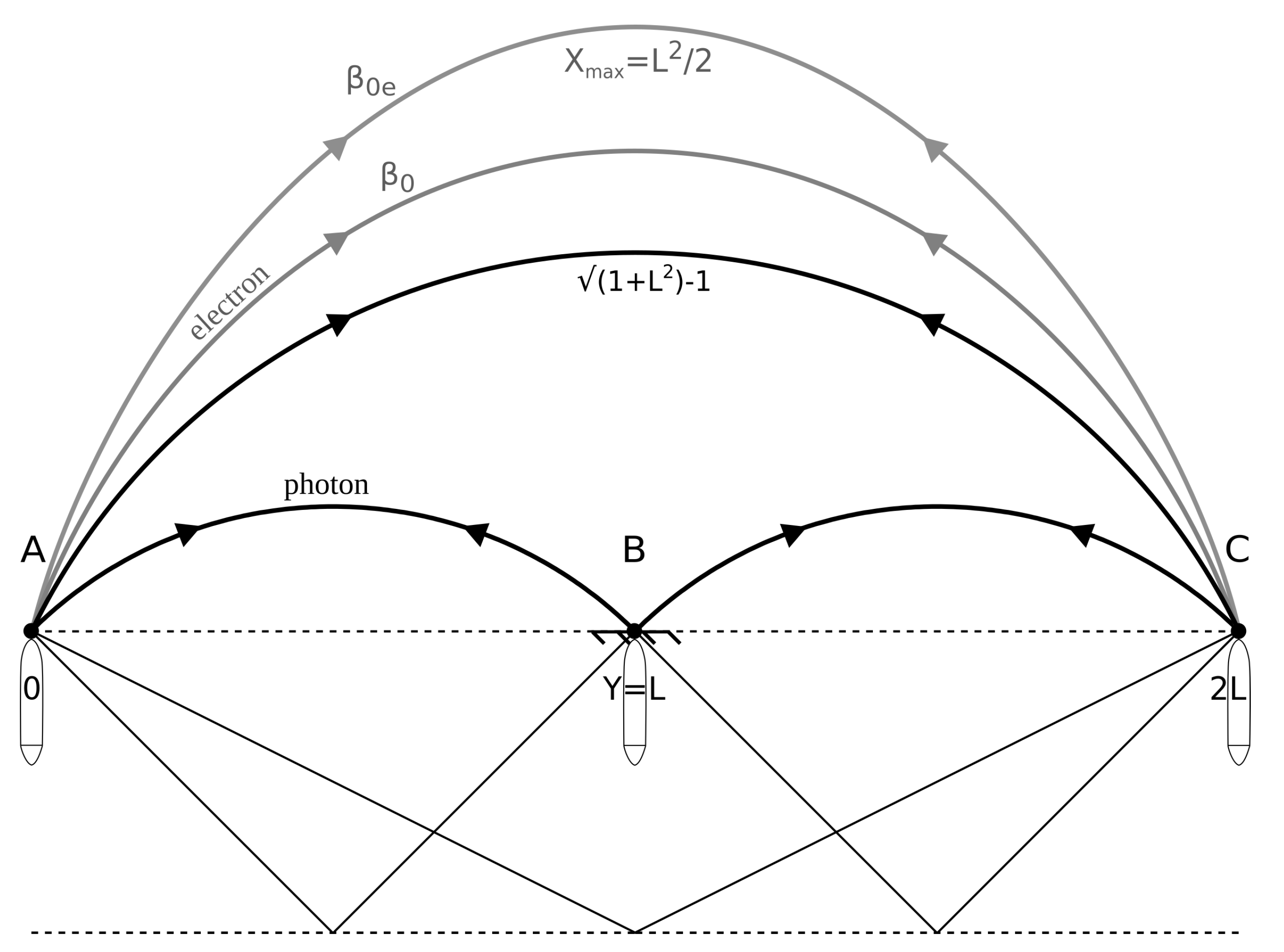
We materialize an accelerated solid at the scale of a stellar system by synchronizing the parallel accelerations of three equidistant rockets; see Figure 20.
The differences in distance and time for the two luminous paths and :
For three rockets A, B and C, one astronomical unit apart and with the accelerations m/s, ns.
If one assumes that the speed of light is constant as in an inertial reference frame, one faces a paradox: the photon that runs the longest distance returns first. However, what is even more paradoxical here, perhaps, is that a particle of matter with an initial speed between 1 and will also arrive before light, despite of covering a greater distance and going, a priori, less quickly. is the speed that a particle of matter must have to travel the path with the same time as a photon to travel . One can find a relativistic version of the tortoise and the hare paradox in La Fontaine’s Fables.
For calculations:
For an electron with , again for m/s and au, , and, as , ns.
Let us tell a relativistic fable: At the start of the race, the fast photon is ahead of the massive electron. The electron then takes a trajectory of a single jump, which is longer but brings the electron higher where time goes faster. Seen from above, the time of the photon freezes, and so the electron manages to overtake its opponent.
Already in C, the electron bounces before the photon.
6. Discussion
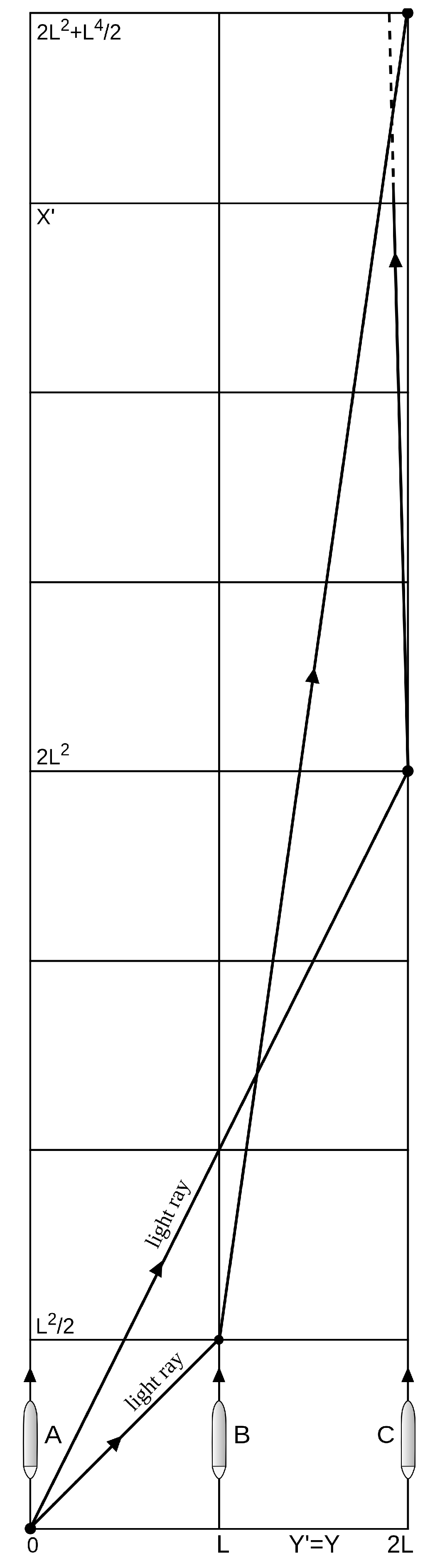
We have chosen to adopt the non-inertial point of view. It seems natural to put ourselves in the shoes of the accelerated observer. For example, to understand why and how the elevator occupant feels an artificial gravity. It is also interesting to note that the motion of R with respect to is defined from the non-inertial reference frame where the proper acceleration, , is imposed constant, unlike , plotted in Figure 12, and with the time dilation factor. All results of this paper could, of course, be also found from the inertial reference frame. From a mathematical view, one could consider that, from the inertial frame, the calculations are more straight as soon as free particles have rectilinear trajectories. However, this is not obvious since, although the trajectories are rectilinear, the different parts of an experimental apparatus move, as in the case of the Michelson interferometer or the three rockets experiment, described in Section 5. Whereas in the accelerated frame, the trajectories are indeed curved, but the different parts are at rest with respect to each other, and the final set of coordinates is directly understandable by the observer. As a comparison, in some sense, it is similar to the situation when we try to understand two-dimensional beings living on the surface of a spherical space, we prefer to immerse ourselves in the intrinsic coordinates of Gauss [1] and the metric of the sphere, although one could solve the problem from the outside in the three-dimensional space [17]. Besides, this is a good exercise for the general theory of relativity, where there is no inertial frame of reference. One needs to be comfortable working directly in a non-inertial world.
Nevertheless, the inertial point of view is welcome to complete the study of our pseudo-paradox. A textbook [5] provides with the formulas: and . Then, one has to solve the intersections of various rectilinear world lines to find and . In , the trajectories are straight, the speed of light is c, and the path is shorter than the path , but one losses symmetries and the calculus is longer. As one can see in Figure 21, for the light paths are drawn only in one direction because, to return to rocket A, the inertial trajectories will have to go too high on the diagram. One finds: and , so, to make short, with the help of a symmetry of Figure 20, , and one gets Equation (17).
Anyway, whoever the observer is, the physics is the same. In any case, to obtain non-inertial special relativity, two principles have to be added to inertial special relativity, the clock hypothesis—two clocks at the same speed, whatever their acceleration, undergo the same time dilation—and the equivalence principle—for any spacetime event there is, locally, a coinciding inertial reference frame.
7. Conclusions
The calculations, presented here, remain relatively straight and use the concepts of metric, coordinated velocity and horizon, which are partly reused in general relativity. At the same time, the textbook case considered helps to avoid a lot of confusion in relativity. To push special relativity to its last non-inertial limits, where an underlying global Minkowskian framework persists, allows us to draw a continuous path from inertial relativity to general relativity. Moreover, the theoretical vision of Einstein’s elevator is broadened with the worldline equations, generalized in the three spatial dimensions, and, hopefully, one day, new experimental tests of non-inertial special relativity become feasible.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Einstein, A. A few inferences from the general theory of relativity, and Gaussian Co-ordinates. In Relativity: The Special and the General Theory; Henry Holt and Company: New York, NY, USA, 1920; Available online: https://www.bartleby.com/173/ (accessed on 5 August 2022).
- Desloge, E.A.; Philpott, R.J. Uniformly accelerated reference frames in special relativity. Am. J. Phys. 1987, 55, 252–261. [Google Scholar] [CrossRef]
- Møller, C. The Theory of Relativity; Oxford University Press: London, UK, 1952; p. 253. Available online: https://archive.org/details/theoryofrelativi029229mbp/page/n7/mode/2up (accessed on 5 August 2022).
- Rindler, W. Relativity: Special, General, and Cosmological; Oxford University Press: Oxford, UK, 2006; Exercise 12.7; pp. 71, 282. [Google Scholar]
- Landau, L.D.; Lifchitz, E.M. The Classical Theory of Fields; Pergamon Press Ltd.: Oxford, UK, 1971; §§ 7, 84, 99. [Google Scholar]
- Desloge, E.A. Spatial geometry in a uniformly accelerating reference frame. Am. J. Phys. 1989, 57, 598–602. [Google Scholar] [CrossRef]
- Semay, C. Observer with a constant proper acceleration. Eur. J. Phys. 2006, 27, 1157–1167. [Google Scholar] [CrossRef]
- Rouaud, M. Special Relativity, A Geometric Approach; Lulu Press, Inc.: Durham, UK, 2020; pp. 157, 167, 243, 387. [Google Scholar]
- Born, M. Die Theorie des starren Elektrons in der Kinematik des Relativitätsprinzips [The theory of the rigid electron in the kinematics of the principle of relativity]. Ann. der Phys. 1909, 335, 1–56. [Google Scholar] [CrossRef]
- Hamilton, J.D. The uniformly accelerated reference frame. Am. J. Phys. 1978, 46, 83–89. [Google Scholar] [CrossRef]
- Spallicci, A.D.; Ritter, P. A fully relativistic radial fall. Int. J. Geom. Methods Mod. Phys. 2014, 11, 1450090. [Google Scholar] [CrossRef]
- Desloge, E.A. Nonequivalence of a uniformly accelerating reference frame and a frame at rest in a uniform gravitational field. Am. J. Phys. 1989, 57, 1121–1125. [Google Scholar] [CrossRef]
- Muñoz, G.; Jones, P. The equivalence principle, uniformly accelerated reference frames, and the uniform gravitational field. Am. J. Phys. 2010, 78, 377–383. [Google Scholar] [CrossRef]
- Blinnikov, S.I.; Okun’, L.B.; Vysotskiĭ, M.I. Critical velocities c/ and c/ in the general theory of relativity. Phys.-Usp. 2003, 46, 1099–1103. [Google Scholar] [CrossRef]
- Tourrenc, P. Relativity and Gravitation; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Thorne, K.S.; Misner, C.W.; Wheeler, J.A. Gravitation; W.H. Freeman and Company: San Francisco, CA, USA, 1971; p. 848. [Google Scholar]
- Rucker, R.v.B. Geometry, Relativity and the Fourth Dimension; Dover Publications, Inc.: New York, NY, USA, 1977. [Google Scholar]
Figure 1.
The thought experiment in the Einstein’s elevator with a ray of light. Here, , d, x, and y denote the force exerted, the width of the box, and the vertical and lateral directions, respectively.
Figure 1.
The thought experiment in the Einstein’s elevator with a ray of light. Here, , d, x, and y denote the force exerted, the width of the box, and the vertical and lateral directions, respectively.

Figure 2.
Minkowski diagram of the rocket in the inertial reference frame . The uniformly accelerated rocket has a hyperbolic worldline. In the reference frame , the coordinate lines of and R are shown. In both cases, the coordinate lines of space and time are orthogonal. In this case, the rocket defines a rigid body [2,3,4], with respect to which one can study the trajectory of the light rays. See Section 2.2 for details.
Figure 2.
Minkowski diagram of the rocket in the inertial reference frame . The uniformly accelerated rocket has a hyperbolic worldline. In the reference frame , the coordinate lines of and R are shown. In both cases, the coordinate lines of space and time are orthogonal. In this case, the rocket defines a rigid body [2,3,4], with respect to which one can study the trajectory of the light rays. See Section 2.2 for details.

Figure 3.
The worldlines of 12 particular rays in a Minkowski diagram with as initial conditions.

Figure 4.
The circular trajectory of the ray traced on a vertical wall of the elevator. The deviation is greater than that of Newton’s parabolic trajectory. At the level of the horizon the deviation is double.
Figure 4.
The circular trajectory of the ray traced on a vertical wall of the elevator. The deviation is greater than that of Newton’s parabolic trajectory. At the level of the horizon the deviation is double.

Figure 5.
In the plane, the trajectories of non-vertical light rays are portions of circles centered on the horizon. The rays thus arrive perpendicularly to the line of centers which is identified with the horizon. The grayed straight lines correspond to the inertial trajectories, in case the rocket is not accelerated. The gray parabolic lines are the Newtonian trajectories. For , a notable difference, the Newtonian rocket will overtake the ray, whereas the relativistic rocket cannot overtake the ray sent forward.
Figure 5.
In the plane, the trajectories of non-vertical light rays are portions of circles centered on the horizon. The rays thus arrive perpendicularly to the line of centers which is identified with the horizon. The grayed straight lines correspond to the inertial trajectories, in case the rocket is not accelerated. The gray parabolic lines are the Newtonian trajectories. For , a notable difference, the Newtonian rocket will overtake the ray, whereas the relativistic rocket cannot overtake the ray sent forward.

Figure 6.
The Minkowski diagram in the non-inertial reference frame . Apart from the limit case , all the light rays follow a partially helical worldline that asymptotically joins the horizon plane in an infinite time t. The maximum deviation tends towards the half-turn for a ray emitted in the direction close to .
Figure 6.
The Minkowski diagram in the non-inertial reference frame . Apart from the limit case , all the light rays follow a partially helical worldline that asymptotically joins the horizon plane in an infinite time t. The maximum deviation tends towards the half-turn for a ray emitted in the direction close to .

Figure 7.
The speed of light which decreases and tends towards zero in . In classical theory, there is no horizon and the speed of light increases.
Figure 7.
The speed of light which decreases and tends towards zero in . In classical theory, there is no horizon and the speed of light increases.

Figure 8.
Two clocks A and B at the same level are synchronized with the radar method. A light beam is emitted by A, reflected in B by a catadioptric system, and, back in A after .
Figure 8.
Two clocks A and B at the same level are synchronized with the radar method. A light beam is emitted by A, reflected in B by a catadioptric system, and, back in A after .

Figure 9.
In the plane, the trajectories of the particles are portions of ellipses with the center C on the horizon. The trajectories are perpendicular to the horizon line. The trajectory from to is a semi-ellipse, or a semi-circle for a zero-mass particle.
Figure 9.
In the plane, the trajectories of the particles are portions of ellipses with the center C on the horizon. The trajectories are perpendicular to the horizon line. The trajectory from to is a semi-ellipse, or a semi-circle for a zero-mass particle.
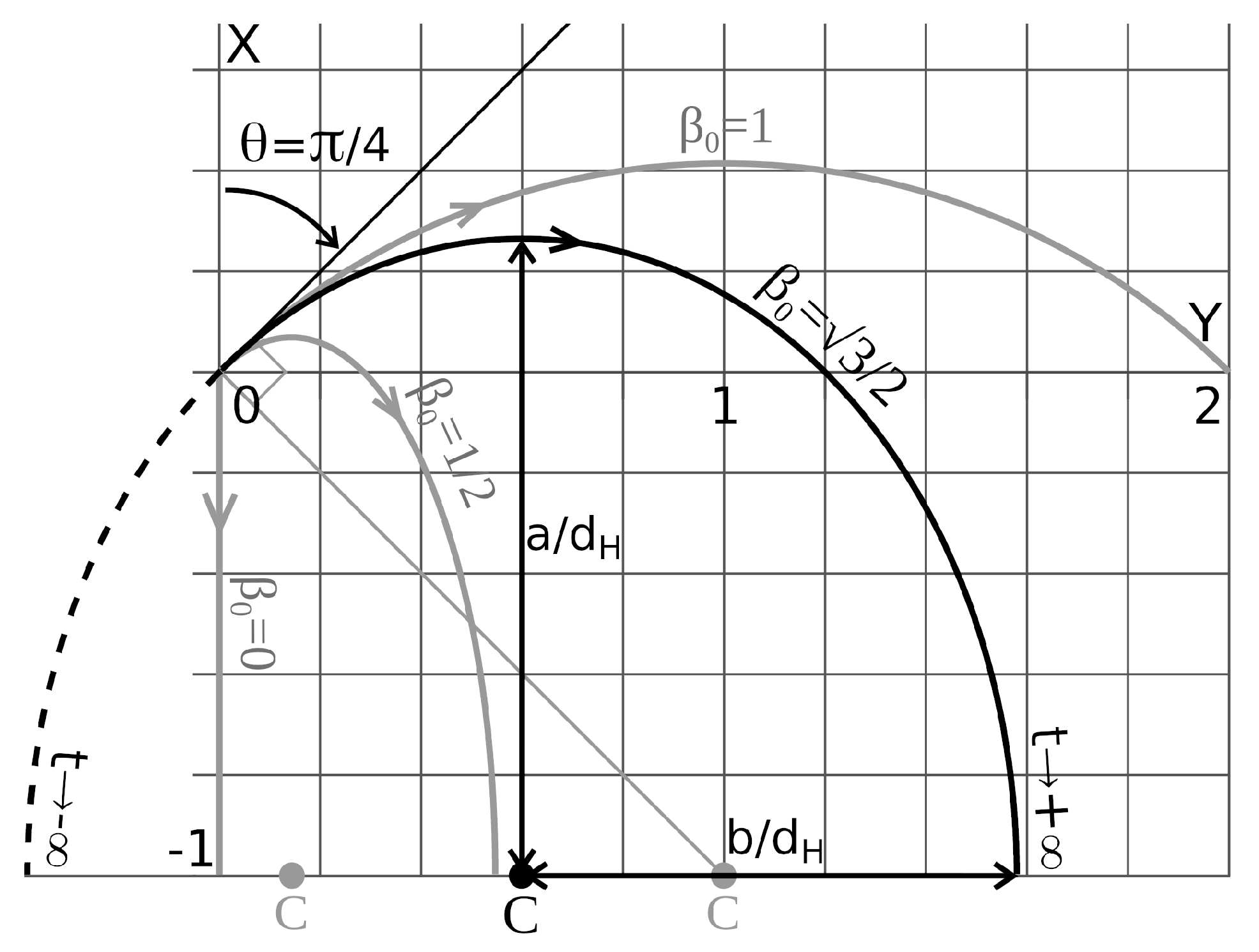
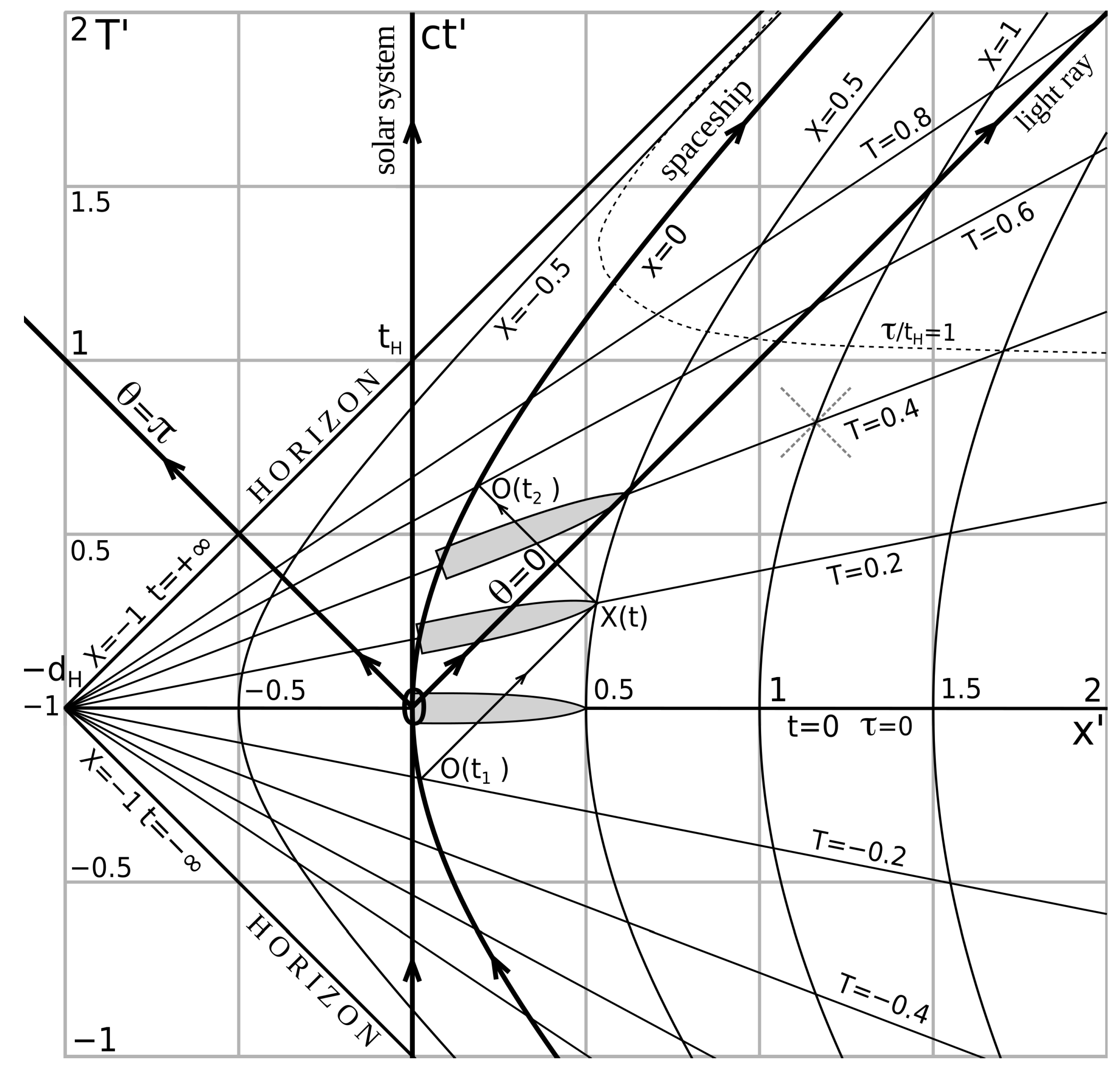
Figure 10.
The Minkowski diagram in the non-inertial reference frame . Worldlines for . In bold, the worldline for a particle released at rest. The intersection between a horizontal plane and the tubular worldsheet, formed by the set of worldlines for different s and a given , also forms an ellipse (dotted curve).
Figure 10.
The Minkowski diagram in the non-inertial reference frame . Worldlines for . In bold, the worldline for a particle released at rest. The intersection between a horizontal plane and the tubular worldsheet, formed by the set of worldlines for different s and a given , also forms an ellipse (dotted curve).

Figure 11.
Falling velocity of a particle, released at rest from O at . with the horizon time. In gray, the classical case.
Figure 11.
Falling velocity of a particle, released at rest from O at . with the horizon time. In gray, the classical case.

Figure 12.
Particle acceleration during a free fall in the uniformly accelerating reference frame.

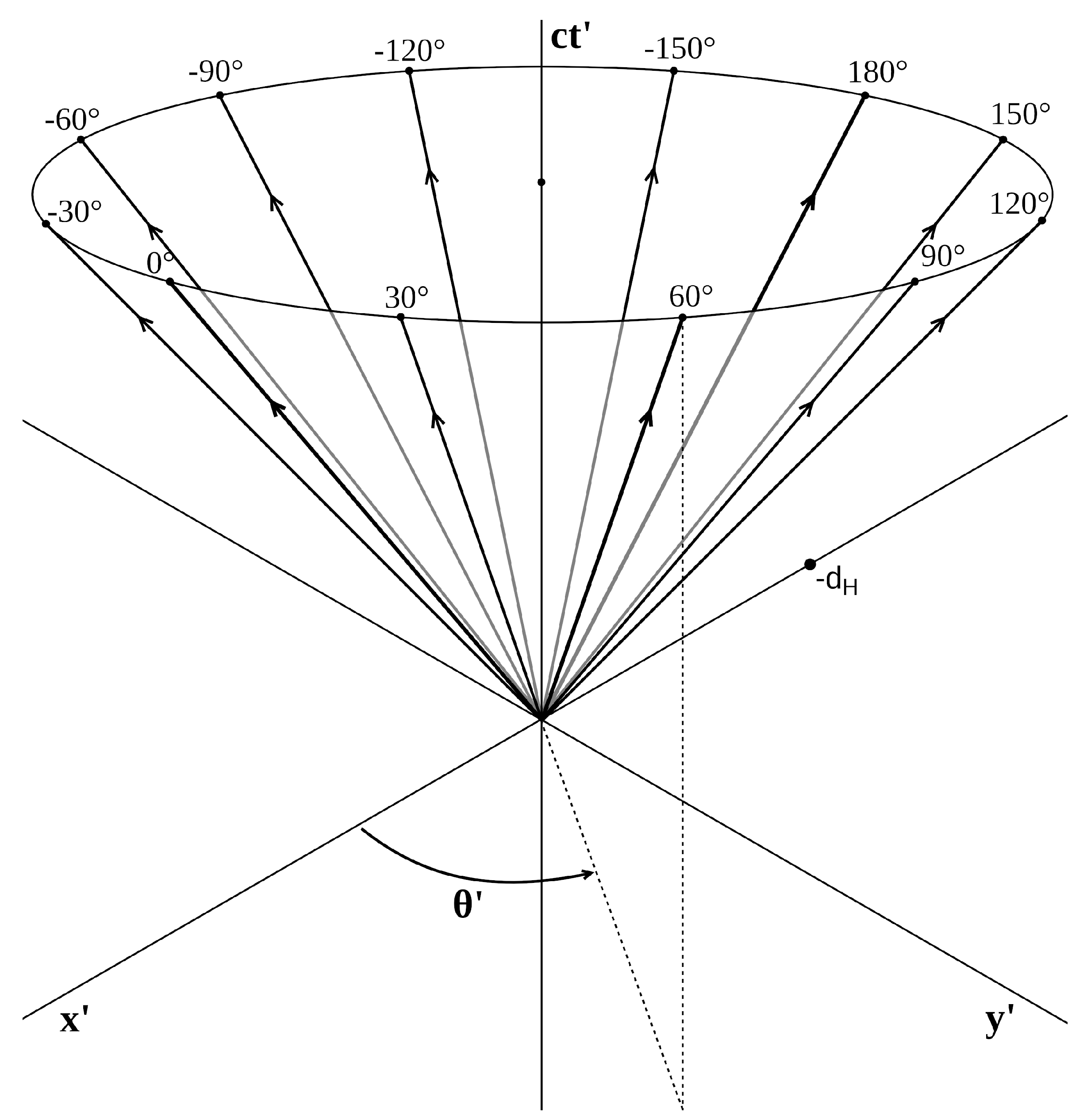
Figure 13.
The Minkowski diagram in the non-inertial frame . The cones indicate how the coordinate velocity of light varies with respect to c.
Figure 13.
The Minkowski diagram in the non-inertial frame . The cones indicate how the coordinate velocity of light varies with respect to c.

Figure 14.
Falling velocity of a particle, dropped without velocity from infinity. In dark gray, the curve according to Newton’s laws. Dotted, the speed of light. In light gray, the speed for a local observer.
Figure 14.
Falling velocity of a particle, dropped without velocity from infinity. In dark gray, the curve according to Newton’s laws. Dotted, the speed of light. In light gray, the speed for a local observer.

Figure 15.
The acceleration of the particle in radial fall towards a black hole. In gray, the classical curve.
Figure 15.
The acceleration of the particle in radial fall towards a black hole. In gray, the classical curve.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 17.
Minkowski diagram for a vertical launch. draws a circle arc. See text for details.

Figure 18.
Michelson interferometer with two arms and of same length l: a coherent light source S, such as a laser, emits a light ray which encounters at O a half-silvered mirror, so half of the light is transmitted to the mirror while the other half is reflected by . Both beams recombine at O and interfere on the detector I. In an inertial reference frame, there is no path length difference. (a) In the non-inertial frame, R, there is a proper acceleration along the downward direction, then the ray along X come back first and a path length difference appears. (b) The arm along the Y-axis rotates to the X-axis to take the place of the arm . The order of arrival of the rays on I is reversed.
Figure 18.
Michelson interferometer with two arms and of same length l: a coherent light source S, such as a laser, emits a light ray which encounters at O a half-silvered mirror, so half of the light is transmitted to the mirror while the other half is reflected by . Both beams recombine at O and interfere on the detector I. In an inertial reference frame, there is no path length difference. (a) In the non-inertial frame, R, there is a proper acceleration along the downward direction, then the ray along X come back first and a path length difference appears. (b) The arm along the Y-axis rotates to the X-axis to take the place of the arm . The order of arrival of the rays on I is reversed.

Figure 19.
Minkowski diagram of the world lines of rays along the two arms of the interferometer for the configuration (a) of Figure 18.
Figure 19.
Minkowski diagram of the world lines of rays along the two arms of the interferometer for the configuration (a) of Figure 18.

Figure 20.
In black, light signals: . In gray, there is an initial velocity such that: . Numerical values for : , . , , .
Figure 20.
In black, light signals: . In gray, there is an initial velocity such that: . Numerical values for : , . , , .

Figure 21.
Inertial point of View.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Rouaud, M. Einstein’s Elevator: World Lines, Michelson–Morley Experiment and Relativistic Paradox. Physics 2022, 4, 892-911. https://doi.org/10.3390/physics4030058
AMA Style
Rouaud M. Einstein’s Elevator: World Lines, Michelson–Morley Experiment and Relativistic Paradox. Physics. 2022; 4(3):892-911. https://doi.org/10.3390/physics4030058
Chicago/Turabian StyleRouaud, Mathieu. 2022. "Einstein’s Elevator: World Lines, Michelson–Morley Experiment and Relativistic Paradox" Physics 4, no. 3: 892-911. https://doi.org/10.3390/physics4030058